1. Introduction
Reliable and accurate cloud detection is a mandatory first step towards developing remote sensing products based on optical satellite images. Undetected clouds in the acquired satellite images hampers their operational exploitation at a global scale since cloud contamination affects most Earth observation applications [
1]. Cloud masking of time series is thus a priority to obtain a better monitoring of the land cover dynamics and to generate more elaborated products [
2].
Cloud detection approaches are generally based on the assumption that clouds present some useful features for their identification and discrimination from the underlying surface. On the one hand, a simple approach to cloud detection consists then in applying thresholds over a set of selected features, such as reflectance or temperature of the processed image, based on the physical properties of the clouds [
3,
4,
5,
6]. Apart from its simplicity, such approaches produce accurate results for satellite instruments that acquire enough spectral information, but it is challenging to adjust a set of thresholds that work at a global level. On the other hand, there is empirical evidence that supervised machine learning approaches outperform threshold-based ones in single scene cloud detection [
1,
7,
8,
9]. For instance, Ref. [
1,
7,
9] show that neural networks are good candidates for cloud detection. However, they present practical limitations since they need a statistically significant, large collection of labeled images to learn from. This is because, in order to design algorithms capable of working globally over different types of surfaces and over different seasons, a huge number of image pixels labeled as cloudy or cloud free must be available to train the models. This labelling process usually requires a large amount of tedious manual work, which is also not exempt from errors. Furthermore, additional independent data has to be gathered to validate the performance of the algorithms, which increases the data requirements and dedication. In any case, both threshold and machine learning based cloud detection algorithms relying only on the information of the analyzed image are still far from being perfect and produce systematic errors specially over high reflectance surfaces such as urban areas, bright sand over coastlines, snow and ice covers [
10].
In this complex scenario, including temporal information helps to distinguish clouds from the surface, since the latter usually remains stable over time. Cloud detection methodologies can thus be divided into monotemporal single scene and multitemporal approaches. Single scene approaches only use the information from a given image to build the cloud mask, while multitemporal approaches also exploit the information of previously acquired images, collocated over the same area, to improve the cloud detection accuracy. Multitemporal cloud detection is therefore an intrinsically easier problem because location and features of clouds vary greatly between acquisitions, whereas the surface is to a certain extent stable. However, multitemporal methods are computationally demanding, and the lack of accessibility to previous data usually hampers their operational application to most satellite missions. Therefore, in order to exploit the wealth of the temporal information, long-term missions with a granted access to the satellite images archive, and suitable computing platforms, are required. A clear example fulfilling these requirements is the Landsat mission from NASA [
11], which provides global image data over land since 1972. For this reason we will focus here on Landsat images, although the methodology and the subsequent discussion can also be applied to other similar satellites [
12].
There exists a wide variety of multitemporal approaches for cloud detection that have been applied to Landsat imagery [
13,
14,
15,
16,
17,
18,
19]. In the Multitemporal Cloud Detection (MTCD) algorithm [
14], the authors use a composite cloud-free image as reference, then they detect clouds by setting a threshold on the difference between the target and the reference in the blue band. In order to reduce false positives, they use an extra correlation criteria with at least 10 previous images. In Ref. [
15], a previous spatially collocated cloud-free image from the same region is manually selected as the reference image. Then a set of thresholds over the reflectance in some Landsat bands (B1, B4 and B6) and over the difference in reflectance between the target and the reference image are set. The Temporal mask (TMask) algorithm [
16] builds a pixel-wise time series regression to model the cloud-free reflectance of each pixel. It uses the FMask algorithm [
5] to decide which pixels to include in such a regression model. Then, it applies a set of thresholds over the difference in reflectance between the estimated and the target image in Landsat bands B2, B4 and B5. The work presented in Ref. [
17] is also based on FMask. In this case, they first remove one of the FMask tests to reduce over-detection, and compute the FMask cloud probability for each image in the time series. Afterwards, they compute the pixel-wise median FMask cloud probability and the standard deviation over the time series. Then, analyzed pixels are masked as cloudy if (a) the modified FMask says it is a cloud; or (b) if the cloud probability exceeds 3.5 standard deviations the median value. Recently, Ref. [
19] proposed to also use a composite reference image and a set of thresholds over the difference in reflectance between the target and the reference in Landsat bands B3, B4 and B5. Thus the method is similar to the one presented in Ref. [
14] but without the correlation criteria over the time series. Finally, in Ref. [
18], we modeled the background surface from the three previous collocated cloud-free images using a non-linear kernel ridge regression that minimizes both prediction and estimation errors simultaneously. Then, the difference image between this background surface reference and the target is clustered and a threshold over the mean difference reflectance is applied to each cluster to decide if it belongs to a cloudy or cloud-free area. In summary, one can see how most of the multitemporal cloud detection schemes proposed in the literature cast the cloud detection problem as a change detection problem [
20]: a reference image is built using cloud-free pixels and clouds are detected as particular changes over this reference. To decide whether the change is relevant enough, several thresholds are usually proposed based on heuristics.
Three main issues not properly addressed can be identified in all multitemporal approaches proposed so far:
Therefore, we propose a multitemporal cloud detection algorithm that is also based on the hypothesis that surface reflectance smoothly varies over time, whereas abrupt changes are caused by the presence of clouds. Our proposed methodology extends the work we presented in Ref. [
18]. In particular, the proposed methodology presented in this paper consists of four main steps. First, the surface background is estimated using few previous cloud-free images that are automatically retrieved from the Landsat archive stored in the GEE catalog. Then, the difference between the analyzed cloudy image (target) and the cloud-free estimated background (reference) is computed in order to enhance the changes due to the presence of clouds. This difference image is then processed to find homogeneous clusters corresponding to clouds and surface. Finally, the obtained clusters are labelled as cloudy or cloud-free areas by applying a set of thresholds on the difference intensity and on the reflectance of the representative clusters.
In addition, the surface background estimated from the previous cloud-free images can be also used to perform a
cloud removal (or
cloud filling) in the analyzed cloudy image [
21,
22]. Pixels masked as clouds can be replaced by the estimated surface background at these locations obtaining a completely cloud-free image [
23,
24]. The improved frequency of the satellite images time series can then be used to better monitor land cover dynamics and to generate more elaborated products.
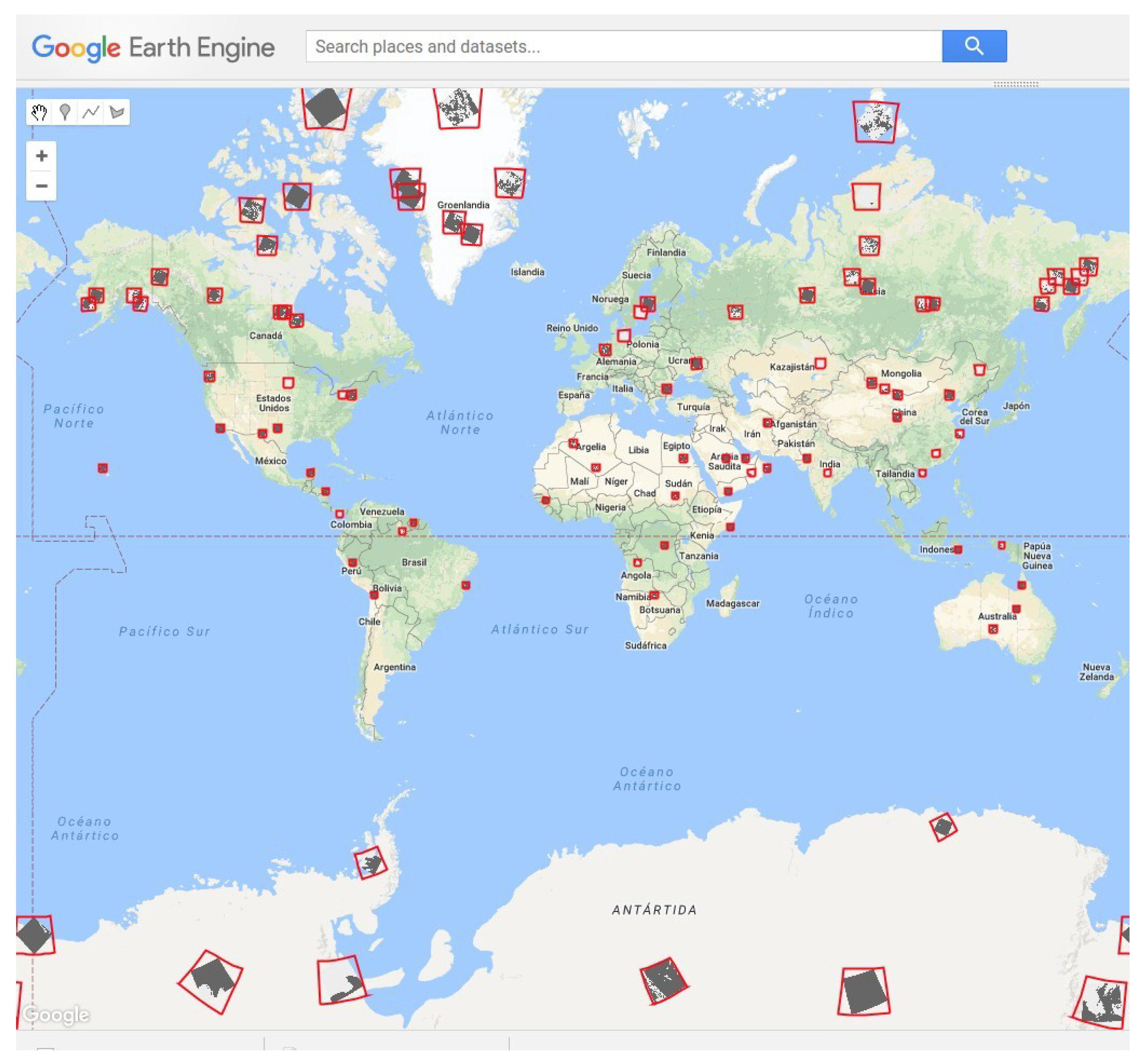
The proposed algorithm is fully implemented in the GEE platform, which grants access to the complete Landsat-8 catalog, reducing the technical complexity of the multitemporal cloud detection and transferring the computational load to the GEE parallel computing infrastructure. The potential of the proposed approach is tested over 2661 500×500 patches extracted from the Biome dataset [
10], and the obtained results are available online for the interested readers (
http://isp.uv.es/projects/cdc/viewer_l8_GEE.html).
The rest of the paper is organized as follows. In
Section 2 the Landsat-8 data, the GEE platform, and the Biome dataset are presented. In
Section 3, we explain the proposed methodology for cloud detection and removal.
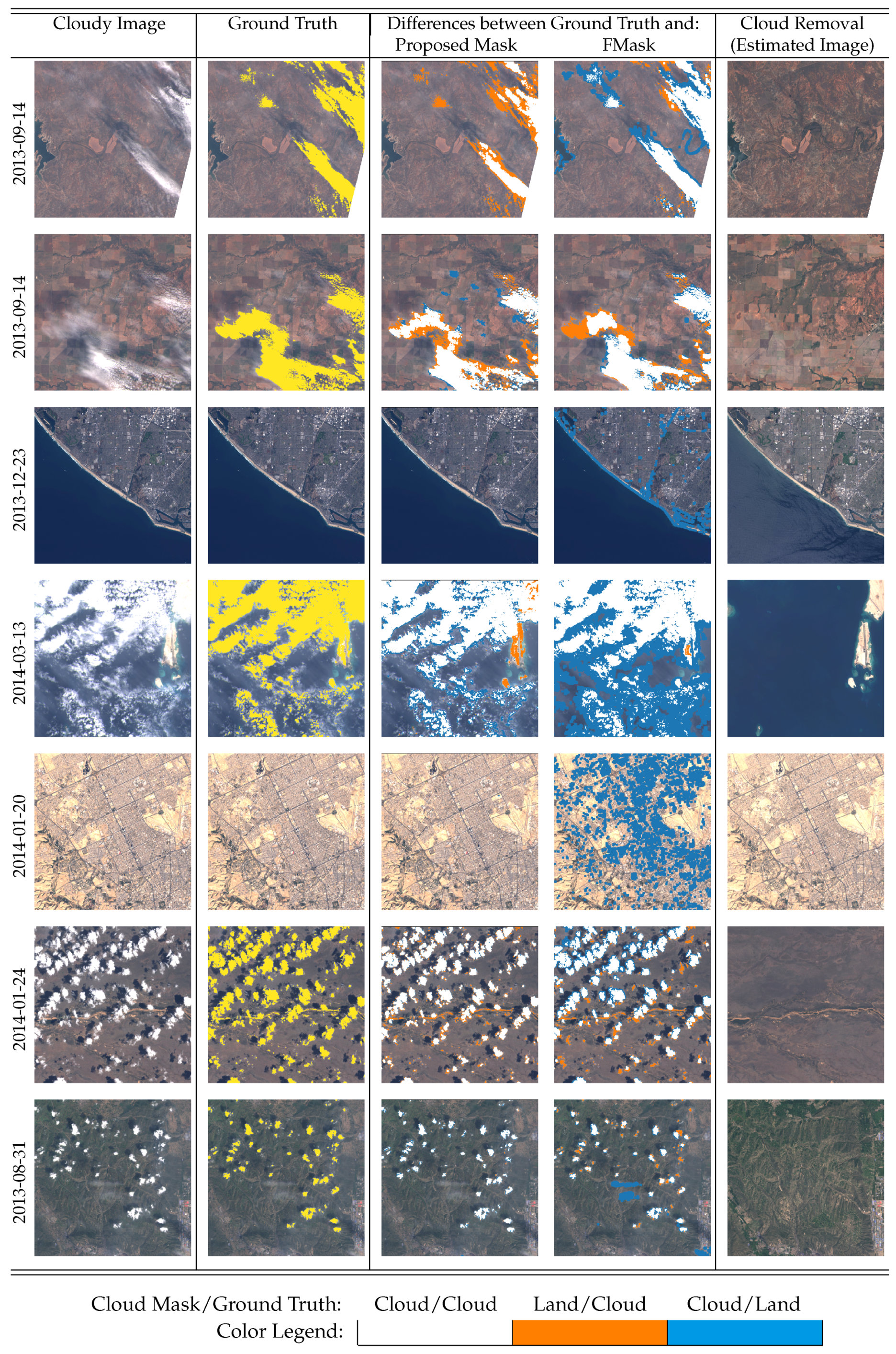
Section 4 presents the evaluation of the proposed methodology. It shows the predictive power of the proposed variables over the dataset, the accuracy, commission and omission errors, some illustrative scenes with the proposed cloud mask, and the cloud removal errors. The algorithm implementation in the Google Earth Engine is briefly described in
Section 5. Finally,
Section 6 discusses the results and summarizes the conclusions.
3. Methodology
The proposed methodology for multitemporal cloud detection is based on our previous work [
18]. It works under the assumption that surface reflectance is stable over time or at least follows smooth variations compared to the abrupt changes induced by the presence of clouds. Therefore, this work follows the widespread approach for cloud detection based on multitemporal background modeling with difference change detection extensively used in the remote sensing literature [
13,
14,
15,
16,
17,
18,
19].
Figure 2 shows a diagram summarizing the proposed multitemporal cloud detection approach. The following sections describe the main methodological steps.
3.1. Background Estimation
One of the main challenges of the background modeling step is to make it computationally scalable: previous attempts in Ref. [
14,
16] are computationally demanding, which make them difficult to apply in operational settings. In order to alleviate these problems, in this study we limit the proposed algorithm to work with only three previous collocated images for the surface background estimation. The key for this process to be fully operational is that the selection and retrieval of the three previous cloud-free collocated images has to be carried out automatically. We use the BQA band included in the Landsat products to discriminate if an image is cloud free; and, as we have mentioned, one of the main advantages of using the GEE Python API together with the Landsat image collection is that this step can be fully automated requiring no human intervention.
We call
pre-filtering to the first image retrieval step, which consists of assessing if previous images are cloud free or not. Pre-filtering can be solved applying some rough cloud detection method, e.g., setting a threshold over the brightness or over the blue channel as proposed in Ref. [
14], or taking advantage of automatic single scene cloud detection schemes if they exist for the given satellite. For this study we use the cloud flag from the Level 1 BQA band of Landsat-8 [
27]. We consider an image cloud free if less than
of its pixels are masked as cloudy. This raises an important consideration on the design of the cloud detection scheme: it should be robust to errors on the pre-filtering method. An extremely inaccurate pre-filtering algorithm can undermine the performance of the method since cloudy pixels will be used to model the background surface. We will see that these methods are robust enough to work on situations where previous images have some clouds. It is worth pointing out that, since we limit the cloud cover to be less than 10% in each selected image and we assume that clouds are randomly located from one image to another, the probability that the same pixel is cloudy in all three images is expected to be really low.
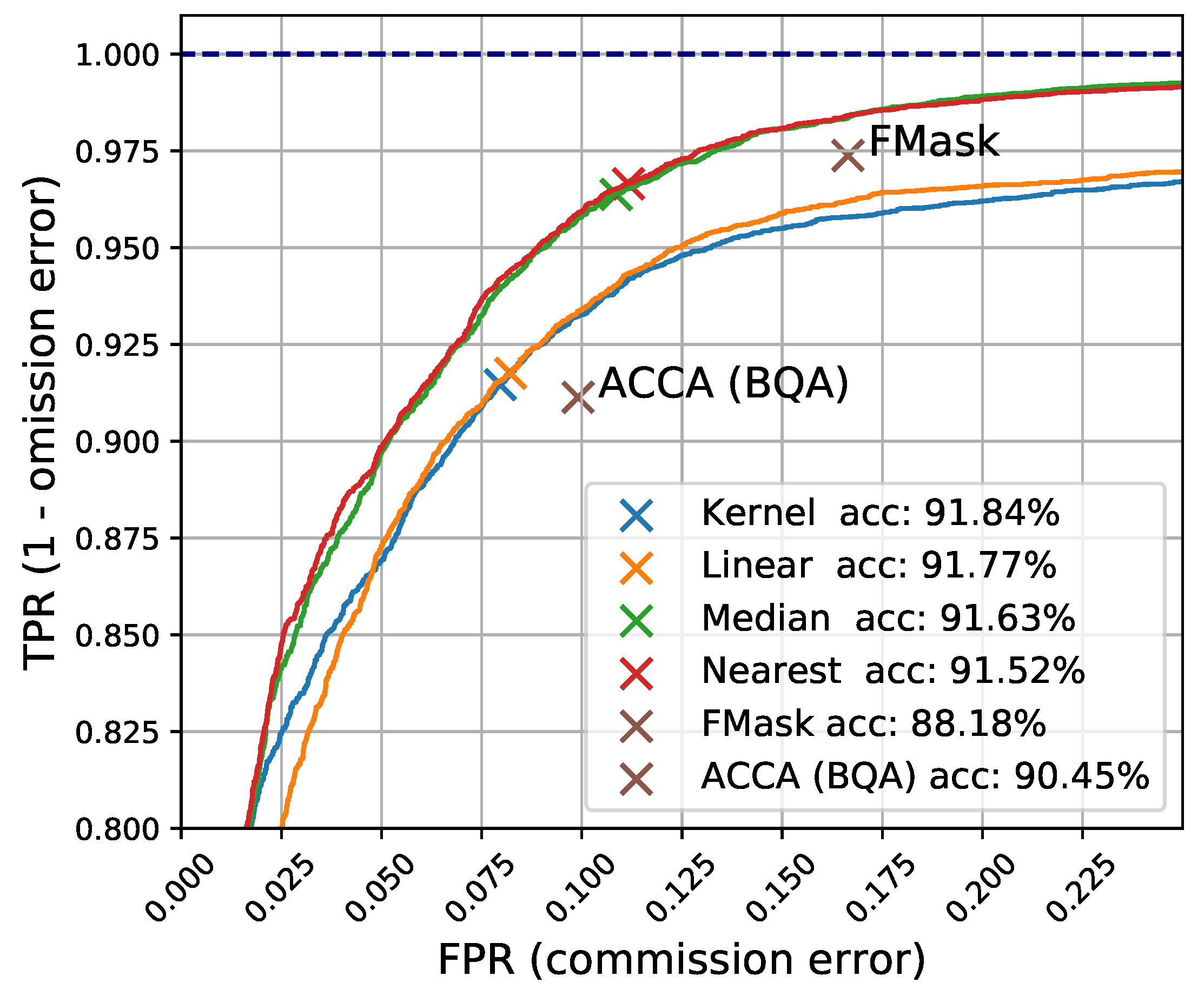
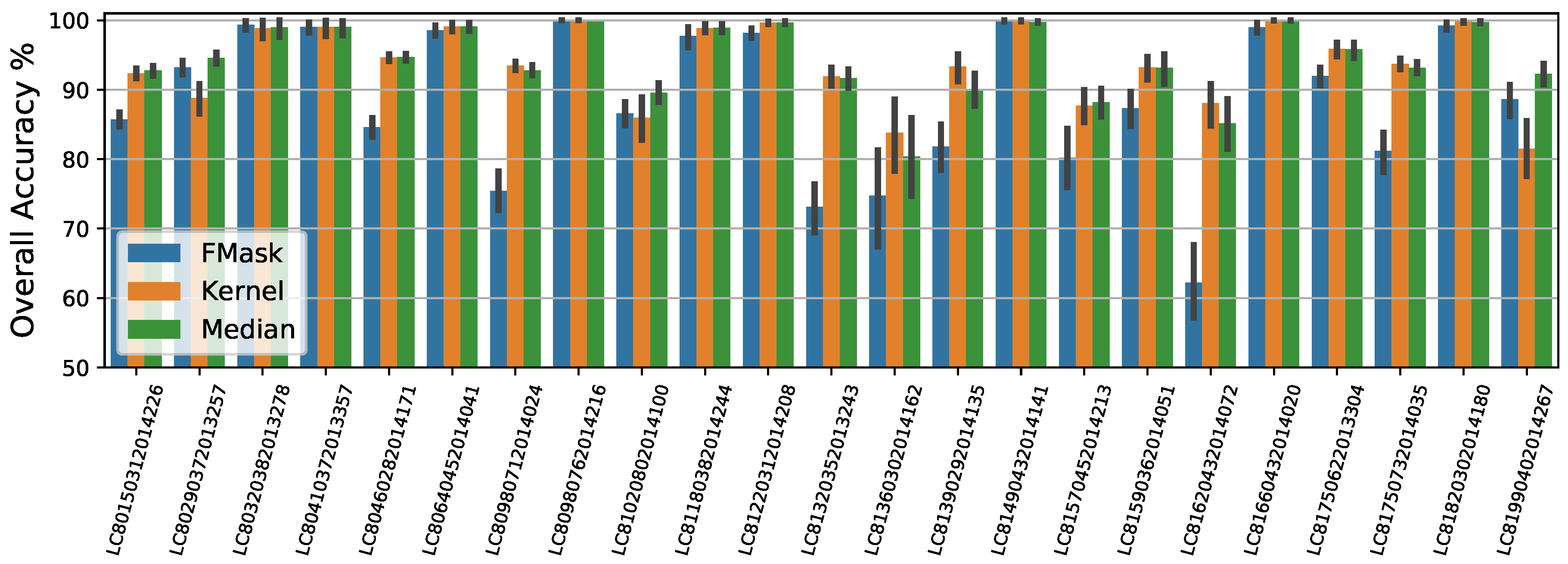
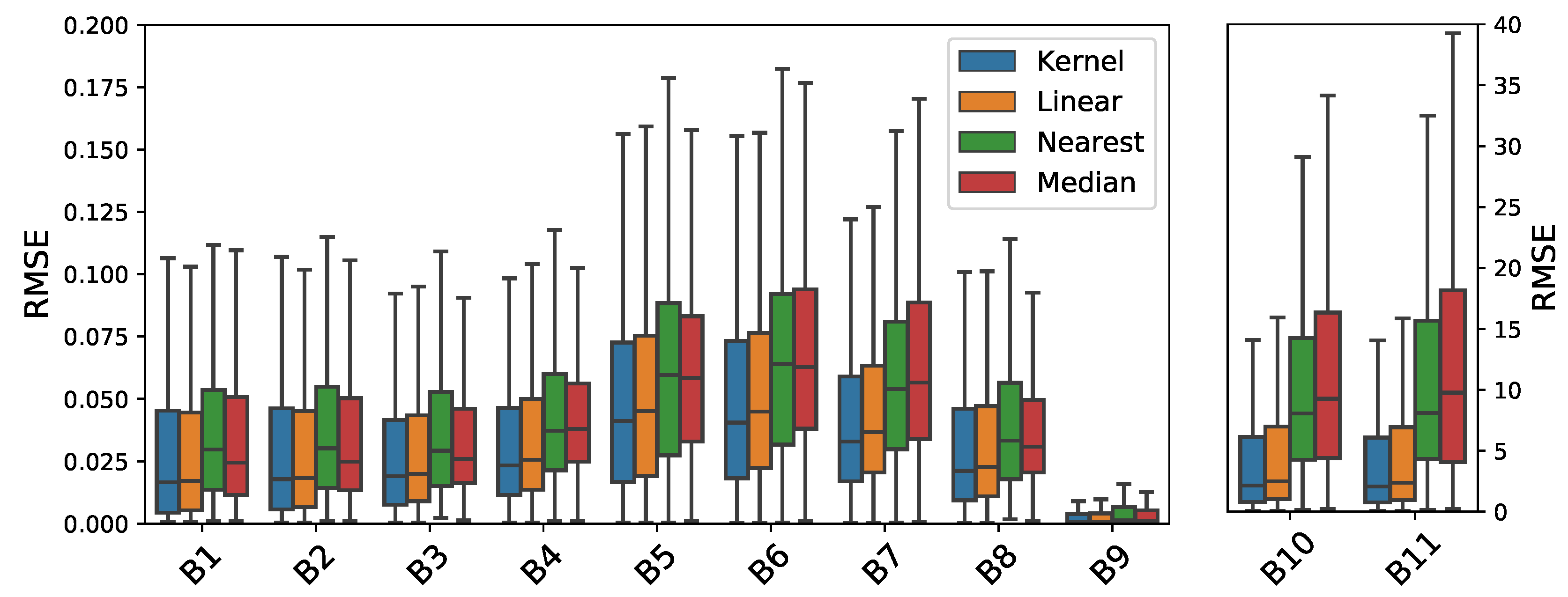
The estimation of the background from the cloud-free image time series is one of the critical steps of the method. We compare four different background estimation methodologies presented in the literature, from simpler to more complex:
Nearest date: It consists of taking the nearest cloud-free image in time as the background. This is the approach used in Ref. [
15], however they rely on human intervention to assess that the image does not present any cloud.
Median filter: It takes the pixel-wise median over time using the three previous cloud-free images. This is the approach suggested in TMask [
16] for pixels where the time series is not long enough.
Linear regression: It fits a standard regularized linear regression using the time series of the previous cloud-free images [
18]. Similarly, TMask [
16] used an iterative re-weighted least squares regression at pixel level, which mitigates the effect of eventual cloudy pixels in the time series.
Kernel regression: The nonlinear version of the former method. It is based on a specific kernel ridge regression (KRR) formulation for change detection presented in Ref. [
18].
3.2. Change Detection and Clouds Identification
Once the background is estimated, we use it as a cloud-free reference image to tackle the cloud detection as a change detection problem. Therefore, we compute the difference image between the cloudy target image and the estimated cloud-free reference, which is the base for most change detection methods [
20].
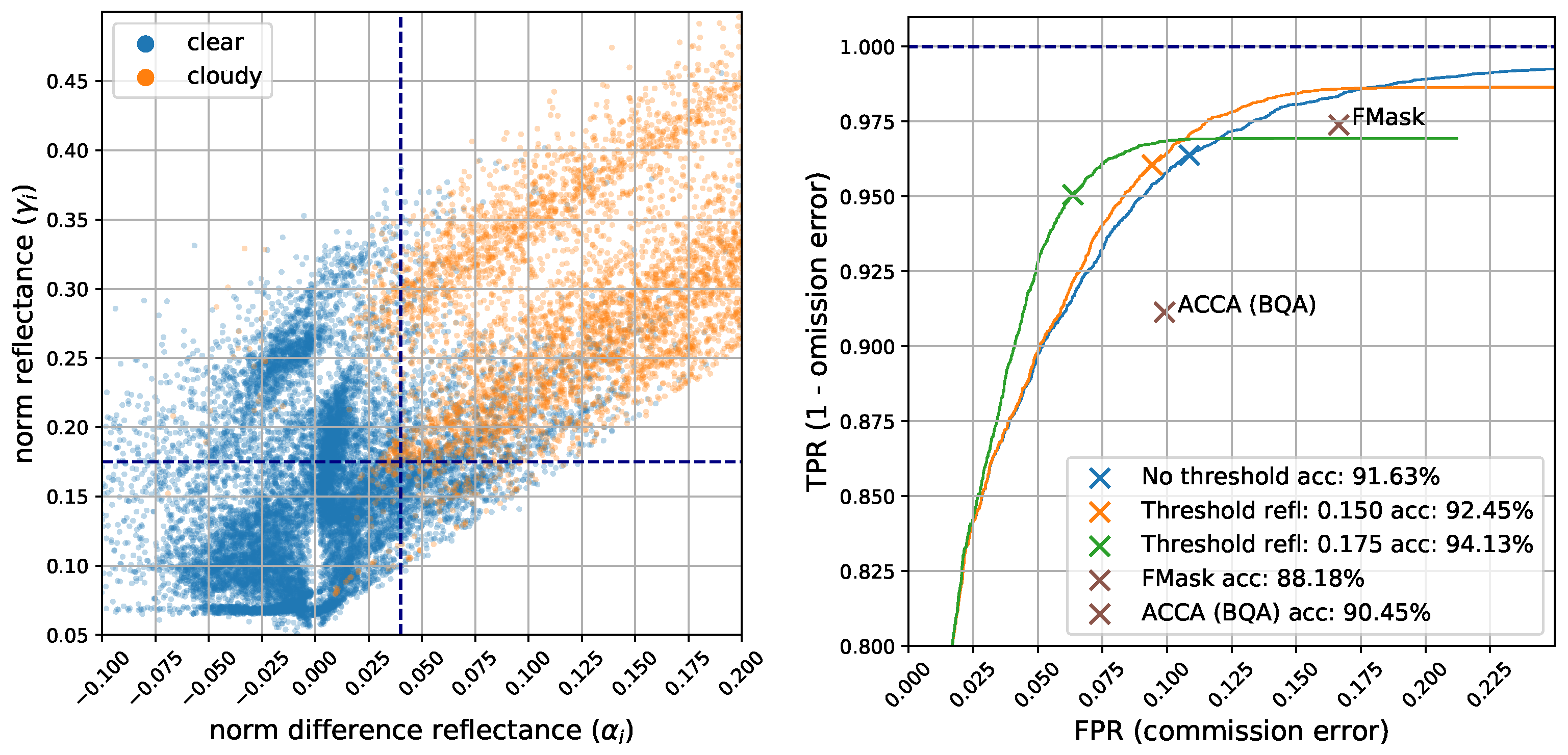
However, we do not find changes by applying thresholds directly to the difference image, i.e., target minus estimated. Instead, we previously apply a k-means clustering algorithm over the difference image using all Landsat-8 bands. Afterwards, specific thresholds are applied at a cluster level, i.e., to some features computed over the pixels belonging to each cluster. In particular, we compute three different features for each cluster i: (a) the norm (intensity) of the difference reflectance image over the visible bands (B2, B3 and B4 for Landsat 8), we denote this quantity with ; (b) the mean of the difference reflectance image over visible bands, ; and (c) the norm of reflectance image over the visible bands, . A cluster is classified as cloudy if the three following tests over these features are satisfied: , and .
The threshold 0.04 on the difference of reflectance image is ubiquitous in the existing literature. For instance, TMask [
16] also suggested 0.04 for the B4 channel, MTCD [
14] suggests 0.03 on the blue band weighted by the difference between the acquisition time of the image and the reference. The method proposed in Ref. [
19] also used 0.04 in the B3 and B4 bands. In contrast, in our previous work [
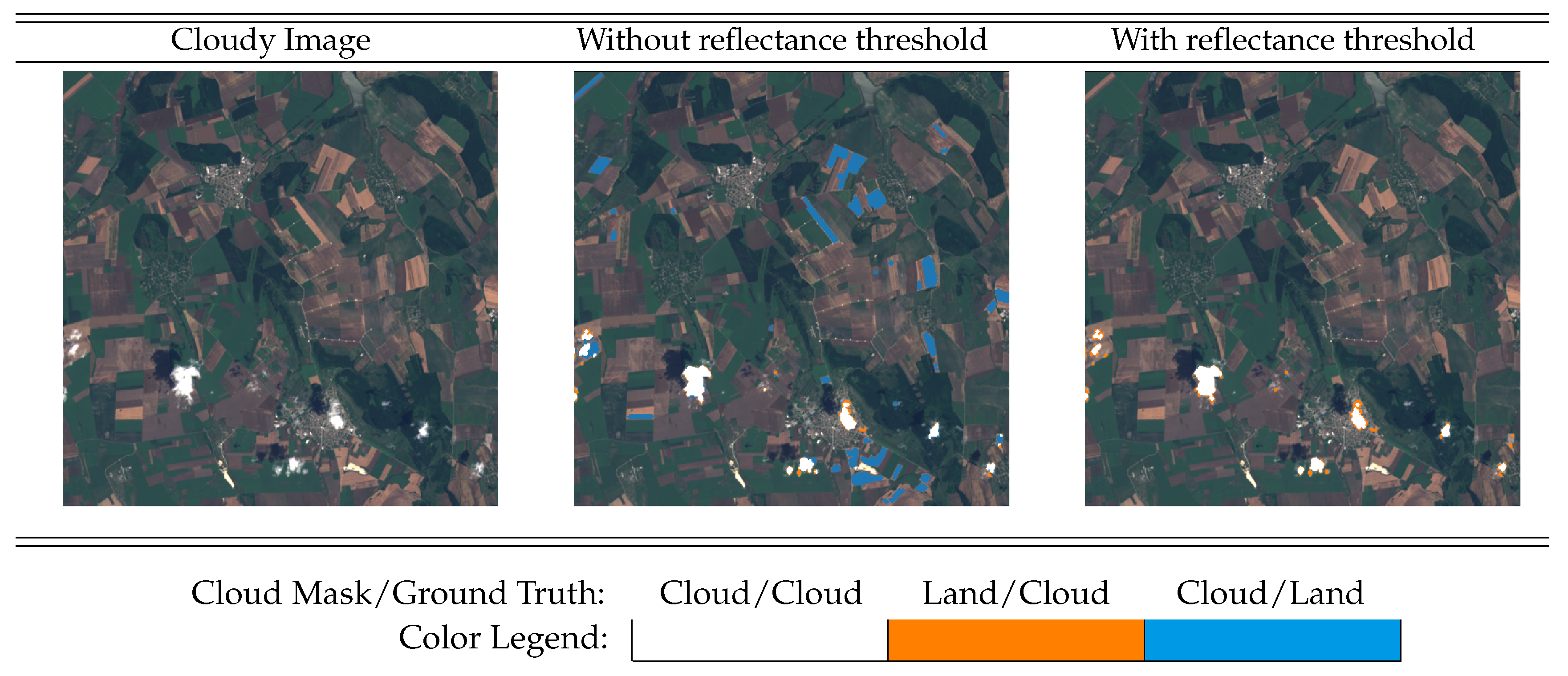
18] the threshold was higher (0.09) since we used the norm over all the reflectance bands. Here we select the norm as a more robust indicator but restricted to the visible bands (B2, B3 and B4). This threshold is intended to detect significant differences, i.e., with a sufficient intensity to be considered changes, while the other two conditions to be satisfied are specifically included to distinguish clouds from the rest of possible changes in the surface. On the one hand, clouds are usually brighter than the surface so clouds imply an increase in reflectance with respect to the reference background image. By imposing the temporal difference over the visible bands to be positive we exclude intense changes decreasing the reflectance, such as shadows, flooded areas, agricultural changes, etc. On the other hand, we also want to discard changes that increase the brightness but do not look like a cloud in the target image, e.g., agricultural crops. Therefore, we also impose that the norm of the top of atmosphere (TOA) reflectance over the visible bands is higher than 0.175 in order to consider that the cluster corresponds to a cloud. The norm of the visible reflectance bands is also used in Ref. [
17] to distinguish potentially cloudy pixels, although in this work they set a lower threshold of 0.15 because they wanted to over-detect cloudy areas.
Modifying these thresholds will make the algorithm more or less cloud conservative. We believe that the subsequent user of the cloud mask should have some flexibility to choose to be more or less cloud conservative. For instance, applications like land use or land cover classification are less affected by the presence of semitransparent cirrus whereas for instance estimating the water content of canopy should be much more cloud conservative. Providing the receiver operator curve (ROC) [
32] for the entire dataset allows the users to better select these thresholds in order to obtain a trade-off between commission (false positives) and omission (false negatives) errors for their particular application.
3.3. Remarks
One of the main differences of our proposal for cloud detection is the clustering step. We apply a k-means clustering over the difference image over all bands of the satellite. We fixed the number of clusters to 10; this number is related to the size of the image (500 × 500 pixels in the experiments) so if larger images are used this number should be increased. We tried however different numbers of clusters (5, 15 and 20) but we did not observe major differences in performance. The clustering step seeks to capture patterns over all the bands that cannot be captured with a single static threshold. For example, it is well known that the Thermal Infrared Bands (TIR, B10 and B11) have good predictive power for the cloud detection problem. However, setting a global threshold independently of location and season is very difficult since surface temperature greatly varies over places and surfaces. In addition, working with time series exacerbates this problem since the surface temperature might vary quite a lot with the date of the acquired image. Therefore, k-means clustering is intended to group similar patterns, e.g., in temperature, and pixels assigned to the same cluster will be classified afterwards to the same class (cloudy or clear). The clustering step simplifies the problem since instead of classifying pixels we have to classify clusters. However, it might introduce errors in mixed clusters where not all the pixels are purely from one of the two classes (cloudy or clear). In our case, if we classify each cluster according to its majority class using the ground truth, we obtain a classification error lower than 3% for all the proposed background estimation methods in the used dataset. This error can be considered a lower bound of the classification error for the presented results. Finally, it is worth mentioning that if we apply the thresholds directly over the difference image, i.e., without the clustering step, numerical accuracy is not significantly affected, but visual inspection showed less consistency on the masks and higher salt-and-pepper effects.
5. Algorithm Implementation in the Google Earth Engine
The data in the GEE platform is organized in collections, usually composed of images or features. Images contain bands (spectra, masks, products, etc.), properties, and metadata. Features can contain any kind of information needed to process data, such as labels for supervised algorithms, polygons to define geographical areas, etc. Users can apply their own defined functions, or use the ones provided by the API, using an operation called
mapping, which essentially applies a function over any given collection independently. This allows a straightforward processing of large amounts of images and data in parallel. Using this computational paradigm we implemented the full proposed cloud detection scheme using the Python API. In particular, given an input target image, we
map and
filter the Landsat-8
LANDSAT/LC8_L1T_TOA_FMASK Image Collection. Then the filtered collection is
reduced to produce an
Image which is the background estimation. With this reference image we compute the difference image and apply the
k-means
clustering. Finally, we apply the thresholds as defined in
Section 3.
The manual cloud masks from the Biome dataset were ingested in the GEE. Therefore, the proposed methodology together with the comparison with the ground truth is implemented using only the Python API of the GEE platform. The developed code has been published in GitHub at
https://github.com/IPL-UV/ee_ipl_uv. In that package we provide a function that computes the cloud mask following the proposed methodology for a given GEE image. In addition, some Python notebooks with examples that go step by step on the proposed methodology have been included in the software package.
Finally, as we have mentioned, in order to show the potential of the GEE platform the proposed algorithms have been tested over 2661 patches extracted from the Biome dataset. The obtained cloud masks can be inspected online for the whole dataset at
http://isp.uv.es/projects/cdc/viewer_l8_GEE.html.
6. Discussion
In previous sections we presented a simple yet efficient multitemporal algorithm for cloud detection. The results show an overall increase in detection accuracy and commission error compared to state-of-the-art mono-temporal approaches such as FMask and ACCA. In addition, omission error could be reduced slightly more for the same commission error than FMask using a lower threshold in reflectance (
), as can be seen in
Figure 6 (left). For cloud detection, it is normally taken for granted that commission errors are better than omissions, thus operational algorithms tend to overmask in order to avoid false negatives. However, we think that the proliferation of open access satellite image archives implies that in the future more advanced users will be interested in controlling by themselves the trade-off between commission and omission errors depending on their underlying application. To this end, we provide
Table 3 as a guide to help in tuning the thresholds of the current algorithm, where we can see the selected combination providing the best trade-off highlighted in bold. From results shown in
Table 2 and
Table 3, we can see that the proposed method presents improvements between 4–5% in classification accuracy and 3–10% in commission errors, compared with FMask and ACCA algorithms.
The proposed multitemporal methodology resembles popular multitemporal algorithms such as TMask [
16] and MTCD [
14] since all of them are based on background estimation and thresholds over the difference image. However, our methodology is simpler and requires less images in the time series to operate. For this reason we consider the current work as a baseline to evaluate trade-offs in processing performance for these more complex multitemporal schemes. It would be of great interest for the community to compare all these approaches in a common benchmark; unfortunately, to this end, we would need labeled images and common open-sourced versions of the algorithms to evaluate the models.
Obviously there are limitations to the proposed multitemporal methodology: for instance, it might fail in situations with sudden changes in the underlying surface, such as permanent snow in upper latitudes. The current dataset lacks these situations, hence we do not recommend its use in such cases.
In addition, another limitation of current and future works on cloud detection is the quality of the ground truth masks: for the Irish dataset [
3], the work [
34] estimated a mean overall disagreement of 7% over the manual cloud masks labelled by three different experts. The labelling procedure to create the Irish dataset [
10] is similar to the Biome dataset that we use in the present work. Therefore, current overall errors are in line with the intrinsic error of human experts following the current labelling procedure. This indicates that in the future, in order to increase the performance, we should develop better labelling methods and provide results by cloud type and underlying surface.
7. Conclusions
In this work, we proposed a multitemporal cloud detection methodology that can be applied at a global scale using the GEE cloud computing platform. We applied the proposed approach to Landsat-8 imagery and we validated it using a large independent dataset of manually labelled images.
The approach is based on a simple multitemporal background modelling algorithm together with a set of tests applied over the segmented difference image, which has shown a high cloud detection power. Our principal findings and contributions can be summarized as follows. This approach outperforms single-scene threshold-based cloud detection approaches for Landsat such as FMask [
5] and ACCA (BQA) [
27]. We provided an evaluation of different background estimation methods and different variables and thresholds in terms of commission and omission errors. In particular, we showed that simple background detection models such as the median or the nearest cloud-free image are both accurate and robust for the cloud detection task. In addition, for the first time to the authors knowledge, a multitemporal cloud detection scheme is validated over a large collection of independent manually labelled images. The whole process has been implemented within the GEE cloud computing platform and a ready to use implementation has been provided. Compared to previous multitemporal open source implementations, our approach also includes the image retrieval and coregistration steps, which are essential for the operational use of the algorithm. The generated cloud masks can be inspected at
http://isp.uv.es/projects/cdc/viewer_l8_GEE.html.
Future lines of research include the application to other optical multispectral satellites requiring accurate and automatic cloud detection. For example, the satellite constellations of Sentinel missions from the European Copernicus programme aim to optimize global coverage and data delivery. In particular, Sentinel-2 mission [
12] acquires image time series with a high temporal frequency and unprecedented spatial resolution for satellite missions providing open access data at a global scale. Additionally, another line of research consists of using the multitemporal cloud masks as a proxy of a ground truth that can be used to train single scene supervised machine learning cloud detection algorithms. This approach has been recently successfully applied to image classification tasks [
35] and would alleviate data requirements of machine learning methods.

 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}