Land Cover Change Detection Based on Adaptive Contextual Information Using Bi-Temporal Remote Sensing Images





Abstract
:
1. Introduction
2. The Proposed Method
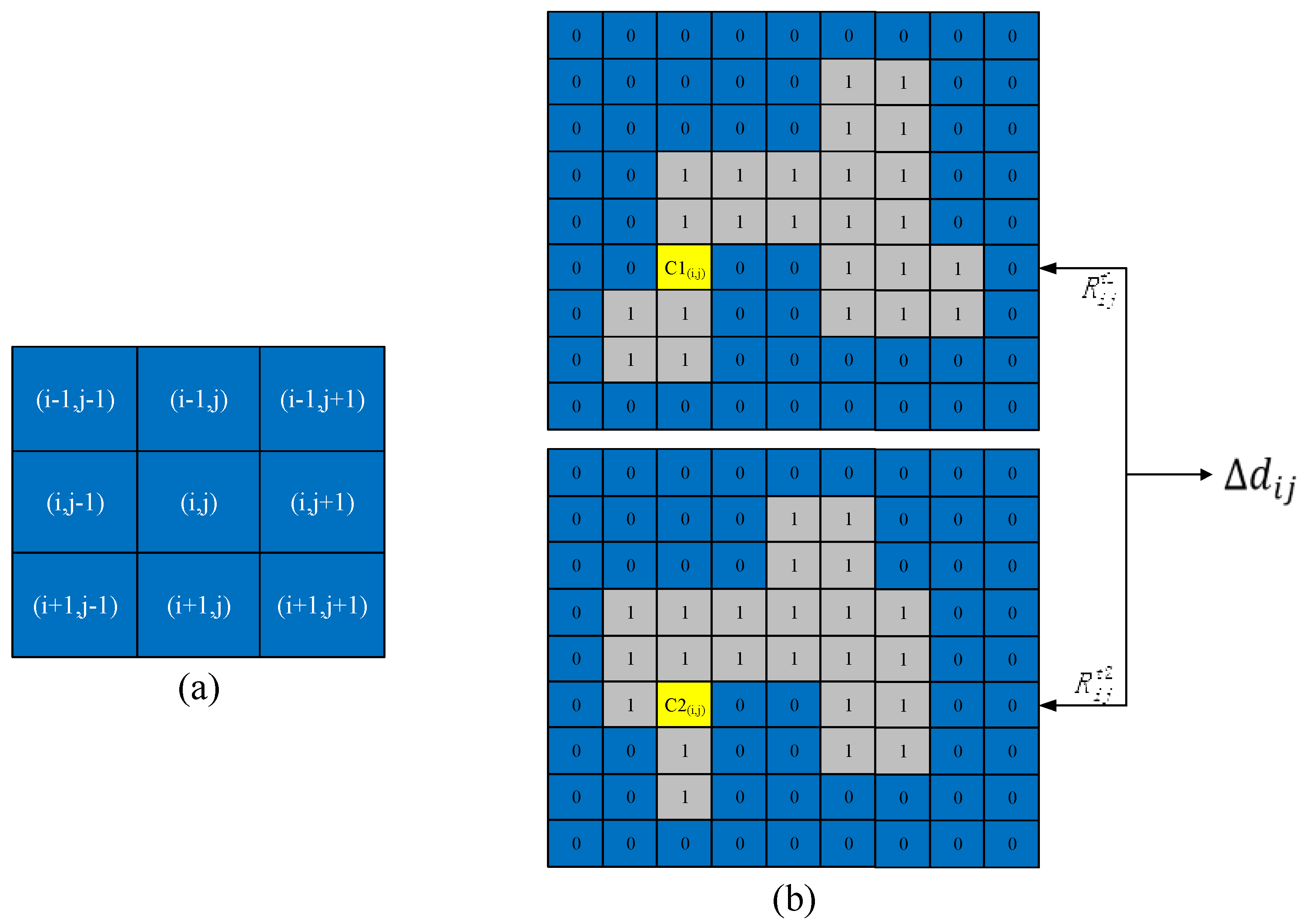
2.1. Adaptive Contextual Information Extraction
2.2. Generate Change Magnitude Image
2.3. Threshold for Obtaining Binary Change Detection Map
3. Experiment
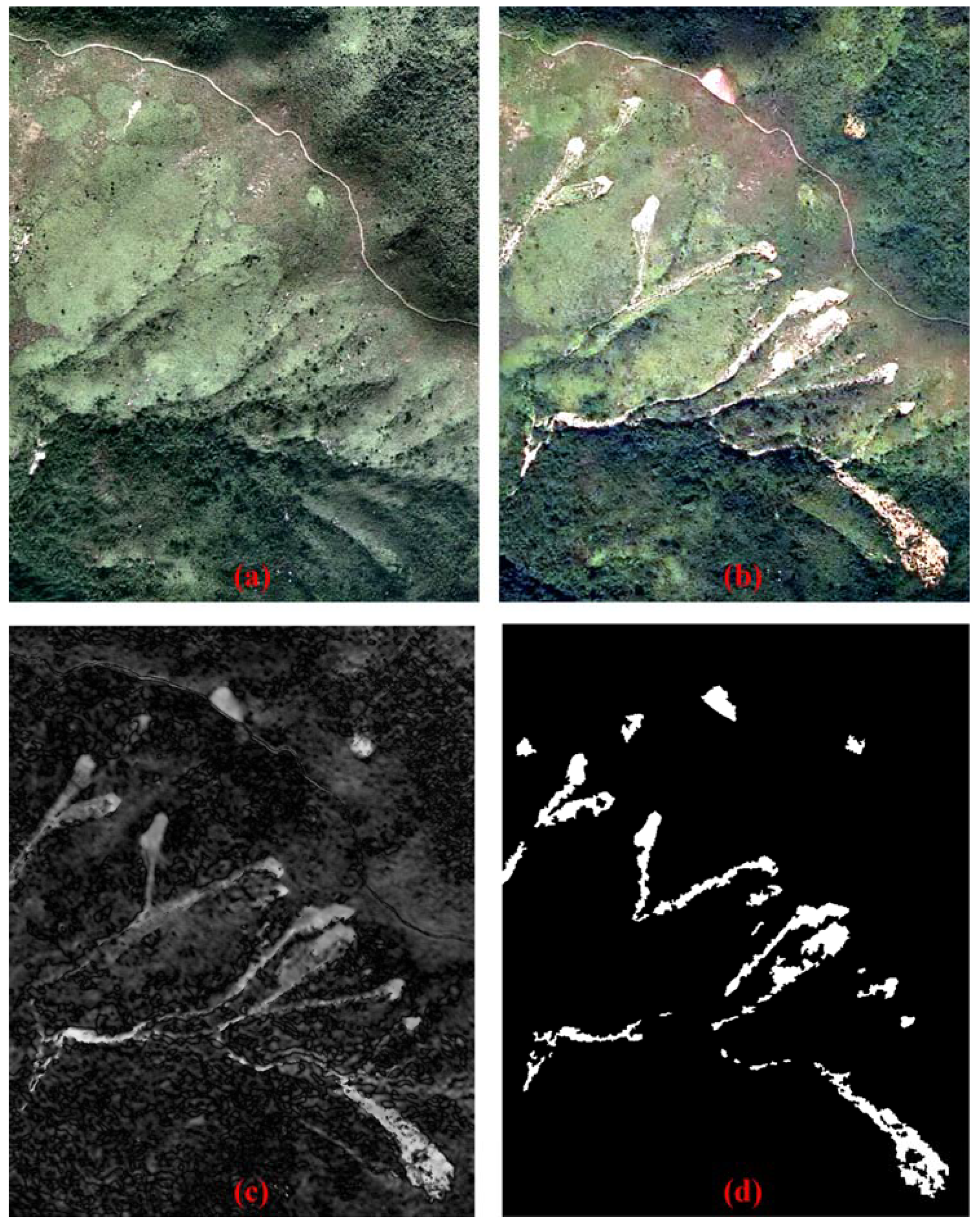
3.1. Dataset Description
3.2. Experimental Setup and Parameter Setting
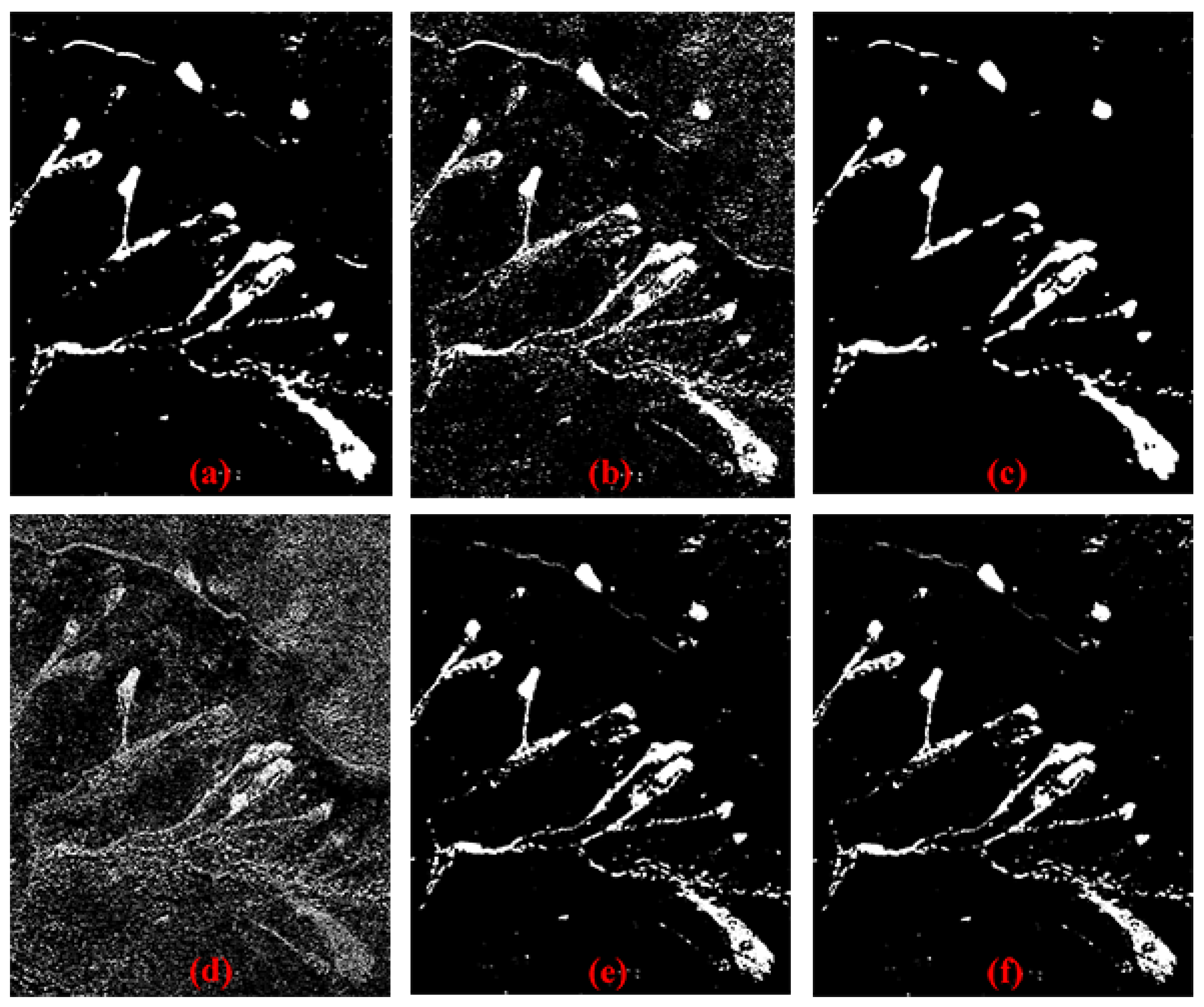
3.3. Results and Quantitative Evaluation
4. Discussion
5. Conclusions
- (1)
- The proposed approach provides competitive change detection results. For the two image scenes that are related to two different real land cover change events, the detection results demonstrate the effectiveness and superiority of the proposed approach in terms of visual performance and quantitatively accuracies when compared to widely used methods, such as LSELUC [45], MLS [46], CVA [36], and PCA_Kmeans [43].
- (2)
- To the best of our knowledge, here for the first time, adaptive region-based distance is applied instead of single pixel-based distance to measure the change magnitude between pairwise pixels of bi-temporal images. The experimental results demonstrate that this proposed approach is helpful for improving the change detection accuracies and performance. The reason for this is that the pixels are highly correlated with their neighbors in the image spatial domain, especially for a ground object (such as a meadow), and this correlation is consistent with the shape and size of an object. Therefore, the proposed contextual information around a pixel based on adaptive region can be considered objective and reasonable.
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Coppin, P.; Jonckheere, I.; Nackaerts, K.; Muys, B.; Lambin, E. Review articledigital change detection methods in ecosystem monitoring: A review. Int. J. Remote Sens. 2004, 25, 1565–1596. [Google Scholar] [CrossRef]
- Radke, R.J.; Andra, S.; Al-Kofahi, O.; Roysam, B. Image change detection algorithms: A systematic survey. IEEE Trans. Image Process. 2005, 14, 294–307. [Google Scholar] [CrossRef] [PubMed]
- Lu, D.; Mausel, P.; Brondizio, E.; Moran, E. Change detection techniques. Int. J. Remote Sens. 2004, 25, 2365–2401. [Google Scholar] [CrossRef]
- Singh, A. Review article digital change detection techniques using remotely-sensed data. Int. J. Remote Sens. 1989, 10, 989–1003. [Google Scholar] [CrossRef]
- Dewan, A.M.; Yamaguchi, Y. Land use and land cover change in Greater Dhaka, Bangladesh: Using remote sensing to promote sustainable urbanization. Appl. Geogr. 2009, 29, 390–401. [Google Scholar] [CrossRef]
- Truong, C.; Oudre, L.; Vayatis, N. A review of change point detection methods. arXiv, 2018; arXiv:1801.00718. [Google Scholar]
- Zhu, Z. Change detection using landsat time series: A review of frequencies, preprocessing, algorithms, and applications. ISPRS J. Photogramm. Remote Sens. 2017, 130, 370–384. [Google Scholar] [CrossRef]
- Tewkesbury, A.P.; Comber, A.J.; Tate, N.J.; Lamb, A.; Fisher, P.F. A critical synthesis of remotely sensed optical image change detection techniques. Remote Sens. Environ. 2015, 160, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Xiao, J.; Shen, Y.; Ge, J.; Tateishi, R.; Tang, C.; Liang, Y.; Huang, Z. Evaluating urban expansion and land use change in Shijiazhuang, China, by using GIS and remote sensing. Landsc. Urban Plan. 2006, 75, 69–80. [Google Scholar] [CrossRef]
- Shahraki, S.Z.; Sauri, D.; Serra, P.; Modugno, S.; Seifolddini, F.; Pourahmad, A. Urban sprawl pattern and land-use change detection in Yazd, Iran. Habitat Int. 2011, 35, 521–528. [Google Scholar] [CrossRef]
- Weng, Q.; Lu, D.; Schubring, J. Estimation of land surface temperature-vegetation abundance relationship for urban heat island studies. Remote Sens. Environ. 2004, 89, 467–483. [Google Scholar] [CrossRef]
- Lo, C.; Quattrochi, D.A. Land-use and land-cover change, urban heat island phenomenon, and health implications. Photogramm. Eng. Remote Sens. 2003, 69, 1053–1063. [Google Scholar] [CrossRef]
- Sun, L.; Wei, J.; Duan, D.; Guo, Y.; Yang, D.; Jia, C.; Mi, X. Impact of land-use and land-cover change on urban air quality in representative cities of china. J. Atmos. Sol.-Terr. Phys. 2016, 142, 43–54. [Google Scholar] [CrossRef]
- Moody, D.I. Change Detection and Change Monitoring of Natural and Man-Made Features in Multispectral and Hyperspectral Satellite Imagery. U.S. Patent No. 9,946,931, 17 April 2018. [Google Scholar]
- McDonnell, M.J.; Hahs, A.K. The use of gradient analysis studies in advancing our understanding of the ecology of urbanizing landscapes: Current status and future directions. Landsc. Ecol. 2008, 23, 1143–1155. [Google Scholar] [CrossRef]
- Modica, G.; Vizzari, M.; Pollino, M.; Fichera, C.; Zoccali, P.; Di Fazio, S. Spatio-temporal analysis of the urban–rural gradient structure: An application in a mediterranean mountainous landscape (Serra San Bruno, Italy). Earth Syst. Dyn. 2012, 3, 263–279. [Google Scholar] [CrossRef]
- Yang, Y.; Zhou, Q.; Gong, J.; Wang, Y. Gradient analysis of landscape spatial and temporal pattern changes in Beijing metropolitan area. Sci. China Technol. Sci. 2010, 53, 91–98. [Google Scholar] [CrossRef]
- Desclée, B.; Bogaert, P.; Defourny, P. Forest change detection by statistical object-based method. Remote Sens. Environ. 2006, 102, 1–11. [Google Scholar] [CrossRef]
- Hermosilla, T.; Wulder, M.A.; White, J.C.; Coops, N.C.; Hobart, G.W. Regional detection, characterization, and attribution of annual forest change from 1984 to 2012 using landsat-derived time-series metrics. Remote Sens. Environ. 2015, 170, 121–132. [Google Scholar] [CrossRef]
- El-Kawy, O.A.; Rød, J.; Ismail, H.; Suliman, A. Land use and land cover change detection in the western Nile delta of Egypt using remote sensing data. Appl. Geogr. 2011, 31, 483–494. [Google Scholar] [CrossRef]
- Prakasam, C. Land use and land cover change detection through remote sensing approach: A case study of Kodaikanal taluk, Tamil nadu. Int. J. Geomat. Geosci. 2010, 1, 150. [Google Scholar]
- Fichera, C.R.; Modica, G.; Pollino, M. GIS and remote sensing to study urban-rural transformation during a fifty-year period. In International Conference on Computational Science and Its Applications; Springer: Berlin/Heidelberg, Germany, 2011; pp. 237–252. [Google Scholar]
- Jin, S.; Yang, L.; Zhu, Z.; Homer, C. A land cover change detection and classification protocol for updating Alaska NLCD 2001 to 2011. Remote Sens. Environ. 2017, 195, 44–55. [Google Scholar] [CrossRef]
- Jin, S.; Yang, L.; Danielson, P.; Homer, C.; Fry, J.; Xian, G. A comprehensive change detection method for updating the national land cover database to circa 2011. Remote Sens. Environ. 2013, 132, 159–175. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Continuous change detection and classification of land cover using all available landsat data. Remote Sens. Environ. 2014, 144, 152–171. [Google Scholar] [CrossRef]
- Zhang, P.; Lv, Z.; Shi, W. Local spectrum-trend similarity approach for detecting land-cover change by using spot-5 satellite images. IEEE Geosci. Remote Sens. Lett. 2014, 11, 738–742. [Google Scholar] [CrossRef]
- Lv, Z.; Liu, T.; Wan, Y.; Benediktsson, J.A.; Zhang, X. Post-processing approach for refining raw land cover change detection of very high-resolution remote sensing images. Remote Sens. 2018, 10, 472. [Google Scholar] [CrossRef]
- Wu, T.; Luo, J.; Fang, J.; Ma, J.; Song, X. Unsupervised object-based change detection via a Weibull mixture model-based binarization for high-resolution remote sensing images. IEEE Geosci. Remote Sens. Lett. 2018, 15, 63–67. [Google Scholar] [CrossRef]
- Bruzzone, L.; Prieto, D.F. Automatic analysis of the difference image for unsupervised change detection. IEEE Trans. Geosci. Remote Sens. 2000, 38, 1171–1182. [Google Scholar] [CrossRef]
- Zanetti, M.; Bruzzone, L. A theoretical framework for change detection based on a compound multiclass statistical model of the difference image. IEEE Trans. Geosci. Remote Sens. 2018, 56, 1129–1143. [Google Scholar] [CrossRef]
- Xu, L.; Zhang, S.; He, Z.; Guo, Y. The comparative study of three methods of remote sensing image change detection. In Proceedings of the 17th International Conference on IEEE Geoinformatics, Fairfax, VA, USA, 12–14 August 2009; pp. 1–4. [Google Scholar]
- Lu, D.; Mausel, P.; Batistella, M.; Moran, E. Land-cover binary change detection methods for use in the moist tropical region of the amazon: A comparative study. Int. J. Remote Sens. 2005, 26, 101–114. [Google Scholar] [CrossRef]
- Malila, W.A. Change vector analysis: An approach for detecting forest changes with landsat. In Proceedings of the LARS Symposia, 1980; page number: 385. Available online: https://docs.lib.purdue.edu/cgi/viewcontent.cgi?article=1386&context=lars_symp (accessed on 6 June 2018).
- Bovolo, F.; Bruzzone, L. A theoretical framework for unsupervised change detection based on change vector analysis in the polar domain. IEEE Trans. Geosci. Remote Sens. 2007, 45, 218–236. [Google Scholar] [CrossRef]
- Chen, Q.; Chen, Y. Multi-feature object-based change detection using self-adaptive weight change vector analysis. Remote Sens. 2016, 8, 549. [Google Scholar] [CrossRef]
- Xiaolu, S.; Bo, C. Change detection using change vector analysis from landsat tm images in Wuhan. Procedia Environ. Sci. 2011, 11, 238–244. [Google Scholar] [CrossRef]
- Lv, Z.; Shi, W.; Zhou, X.; Benediktsson, J.A. Semi-automatic system for land cover change detection using Bi-temporal remote sensing images. Remote Sens. 2017, 9, 1112. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Hao, M.; Shi, W.; Zhang, H.; Li, C. Unsupervised change detection with expectation-maximization-based level set. IEEE Geosci. Remote Sens. Lett. 2014, 11, 210–214. [Google Scholar] [CrossRef]
- Celik, T. A bayesian approach to unsupervised multiscale change detection in synthetic aperture radar images. Signal Process. 2010, 90, 1471–1485. [Google Scholar] [CrossRef]
- Celik, T. Change detection in satellite images using a genetic algorithm approach. IEEE Geosci. Remote Sens. Lett. 2010, 7, 386–390. [Google Scholar] [CrossRef]
- Ng, H.-F. Automatic thresholding for defect detection. Pattern Recognit. Lett. 2006, 27, 1644–1649. [Google Scholar] [CrossRef]
- Celik, T. Unsupervised change detection in satellite images using principal component analysis and k-means clustering. IEEE Geosci. Remote Sens. Lett. 2009, 6, 772–776. [Google Scholar] [CrossRef]
- Lv, Z.; Zhang, W. Contextual analysis based approach for detecting change from high resolution satellite imagery. J. Indian Soc. Remote Sens. 2018, 46, 43–50. [Google Scholar] [CrossRef]
- Zhang, X.; Shi, W.; Liang, P.; Hao, M. Level set evolution with local uncertainty constraints for unsupervised change detection. Remote Sens. Lett. 2017, 8, 811–820. [Google Scholar] [CrossRef]
- Bazi, Y.; Melgani, F.; Al-Sharari, H.D. Unsupervised change detection in multispectral remotely sensed imagery with level set methods. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3178–3187. [Google Scholar] [CrossRef]
- Lv, Z.; Shi, W.; Benediktsson, J.A.; Gao, L. A modified mean filter for improving the classification performance of very high-resolution remote-sensing imagery. Int. J. Remote Sens. 2018, 39, 770–785. [Google Scholar]
- Lv, Z.; Zhang, P.; Atli Benediktsson, J. Automatic object-oriented, spectral-spatial feature extraction driven by tobler’s first law of geography for very high resolution aerial imagery classification. Remote Sens. 2017, 9, 285. [Google Scholar] [CrossRef]
- Huang, X.; Zhang, L.; Li, P. An adaptive multiscale information fusion approach for feature extraction and classification of IKONOS multispectral imagery over urban areas. IEEE Geosci. Remote Sens. Lett. 2007, 4, 654–658. [Google Scholar] [CrossRef]
- Gong, M.; Zhou, Z.; Ma, J. Change detection in synthetic aperture radar images based on image fusion and fuzzy clustering. IEEE Trans. Image Process. 2012, 21, 2141–2151. [Google Scholar] [CrossRef] [PubMed]
- Yetgin, Z. Unsupervised change detection of satellite images using local gradual descent. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1919–1929. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Parameter Settings | ||
|---|---|---|---|
| Mexico Dataset | Sardinia Dataset | Hong Kong Dataset | |
| LSELUC [45] | S = 7 | S = 3 | S = 9 |
| MLS [46] | L = 2, = 0.1 | L = 2, = 0.3 | L = 2, = 0.3 |
| PCA_Kmeans [43] | h = 9, s = 3 | h = 5, s = 3 | h = 9, s = 5 |
| CVA [36] | T = 46 | T = 67 | T = 109 |
| The proposed | T1 = 75, T2 = 50 | T1 = 110, T2 = 50 | T1 = 135, T2 = 50 |
| Data Set | Pixel’s Number of Ground Reference for Each Data Set | ||
|---|---|---|---|
| No. of Unchanged Pixels | No. of Changed Pixels | ||
| 1 | Mexico | 236,555 | 25,589 |
| 2 | Sardinia | 115,974 | 7626 |
| 3 | Hong Kong | 677,434 | 35,066 |
| Method | FA | MA | TE |
|---|---|---|---|
| LSELUC | 0.426 | 12.2 | 1.58 |
| MLS | 0.578 | 11.9 | 1.68 |
| PCA_Kmeans | 0.781 | 10.3 | 1.71 |
| CVA | 0.996 | 12.6 | 2.13 |
| The proposed | 0.746 | 9.18 | 1.57 |
| The proposed+ | 0.790 | 8.47 | 1.54 |
| Method | FA | MA | TE |
|---|---|---|---|
| LSELUC | 1.42 | 10.1 | 1.96 |
| MLS | 2.4 | 8.56 | 2.78 |
| PCA_Kmeans | 1.15 | 12.2 | 1.83 |
| CVA | 3.16 | 12.3 | 3.72 |
| The proposed | 0.995 | 13.3 | 1.76 |
| The proposed+ | 1.12 | 12.3 | 1.81 |
| Method | FA | MA | TE |
|---|---|---|---|
| LSELUC | 2.34 | 15.7 | 3.00 |
| MLS | 6.53 | 16.4 | 7.02 |
| PCA_Kmeans | 2.08 | 18.7 | 2.90 |
| CVA | 14.2 | 44.9 | 15.7 |
| The proposed | 1.96 | 20.9 | 2.89 |
| The proposed+ | 1.83 | 21.7 | 2.81 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, Z.; Liu, T.; Zhang, P.; Atli Benediktsson, J.; Chen, Y. Land Cover Change Detection Based on Adaptive Contextual Information Using Bi-Temporal Remote Sensing Images. Remote Sens. 2018, 10, 901. https://doi.org/10.3390/rs10060901
Lv Z, Liu T, Zhang P, Atli Benediktsson J, Chen Y. Land Cover Change Detection Based on Adaptive Contextual Information Using Bi-Temporal Remote Sensing Images. Remote Sensing. 2018; 10(6):901. https://doi.org/10.3390/rs10060901
Chicago/Turabian StyleLv, Zhiyong, Tongfei Liu, Penglin Zhang, Jón Atli Benediktsson, and Yixiang Chen. 2018. "Land Cover Change Detection Based on Adaptive Contextual Information Using Bi-Temporal Remote Sensing Images" Remote Sensing 10, no. 6: 901. https://doi.org/10.3390/rs10060901
APA StyleLv, Z., Liu, T., Zhang, P., Atli Benediktsson, J., & Chen, Y. (2018). Land Cover Change Detection Based on Adaptive Contextual Information Using Bi-Temporal Remote Sensing Images. Remote Sensing, 10(6), 901. https://doi.org/10.3390/rs10060901