A Frequency Domain Extraction Based Adaptive Joint Time Frequency Decomposition Method of the Maneuvering Target Radar Echo


Abstract
:
1. Introduction
2. Frequency Domain Extraction Based Adaptive Joint Time Frequency Decomposition Method
2.1. Classical AJTF Method
2.2. FDE-AJTF Decomposition Method
2.2.1. Fitness Function
2.2.2. Signal Component Extraction and Residual Updating
2.2.3. Time Window on the Basis Function
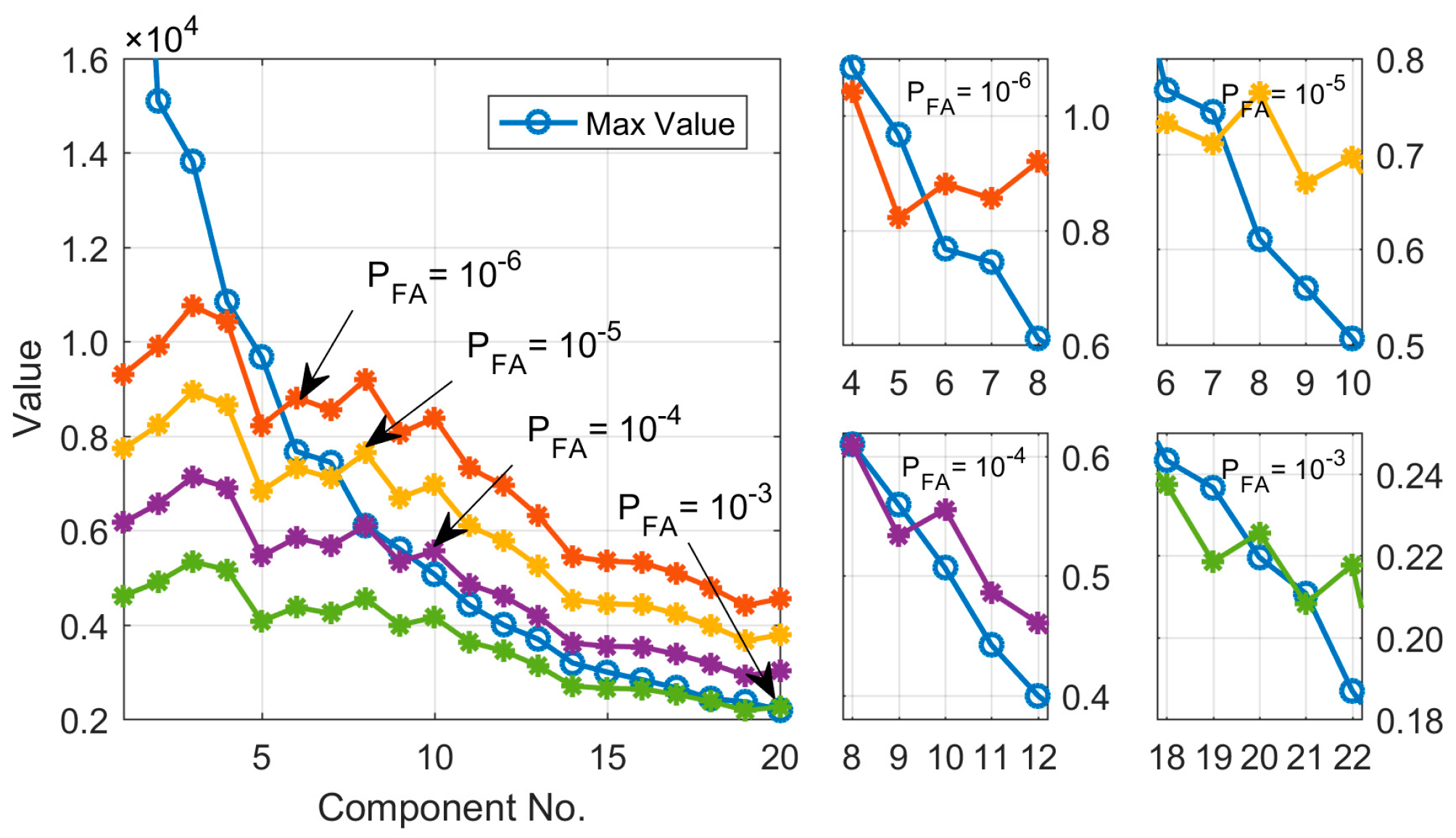
2.2.4. Constant False Alarm Ratio Detection in Component Extraction
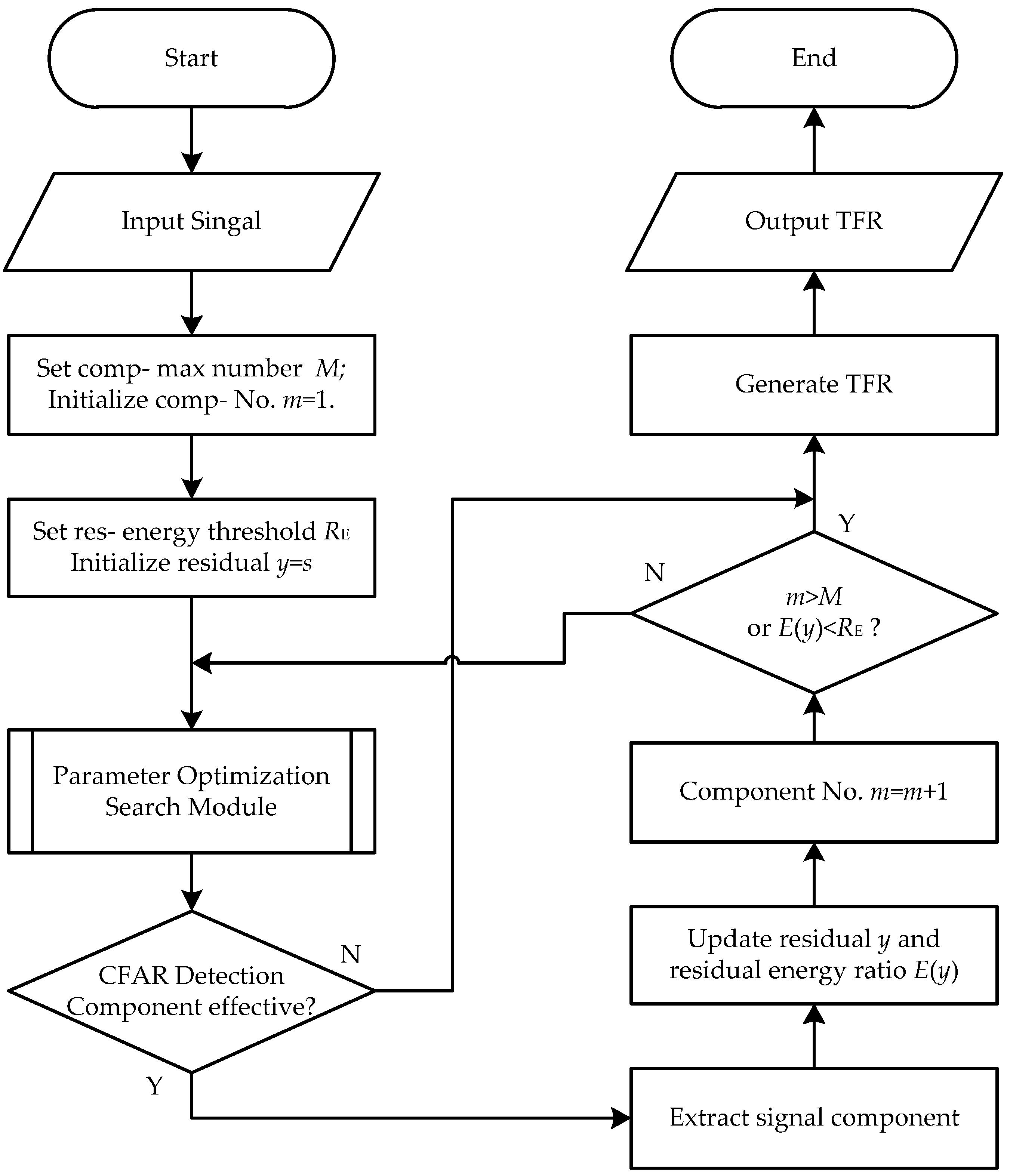
3. FDE-AJTF Procedure
4. Simulation and Experimental Test
4.1. Simulation and Analysis
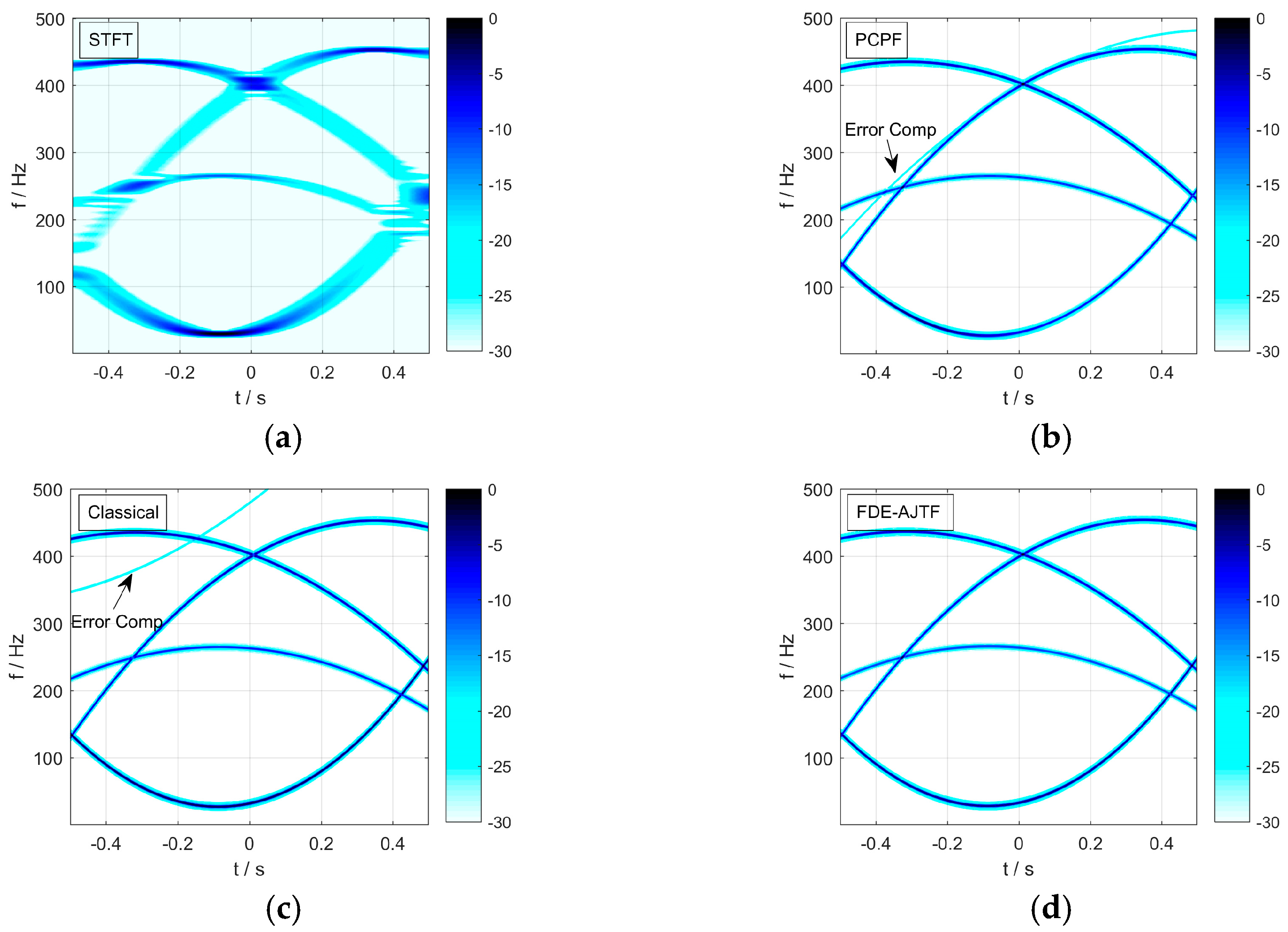
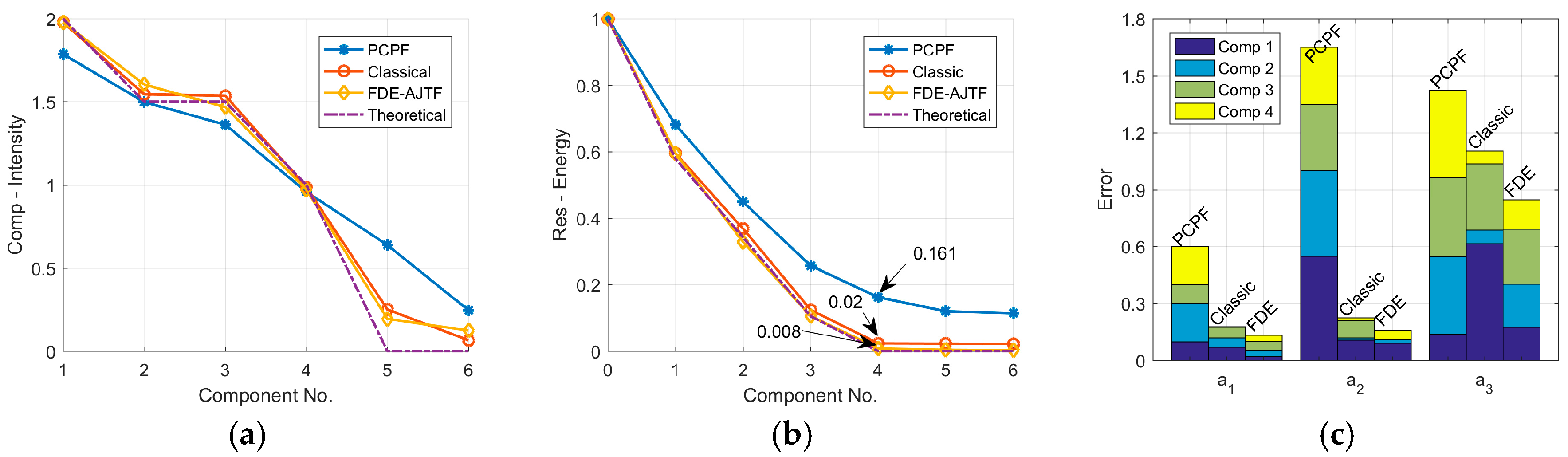
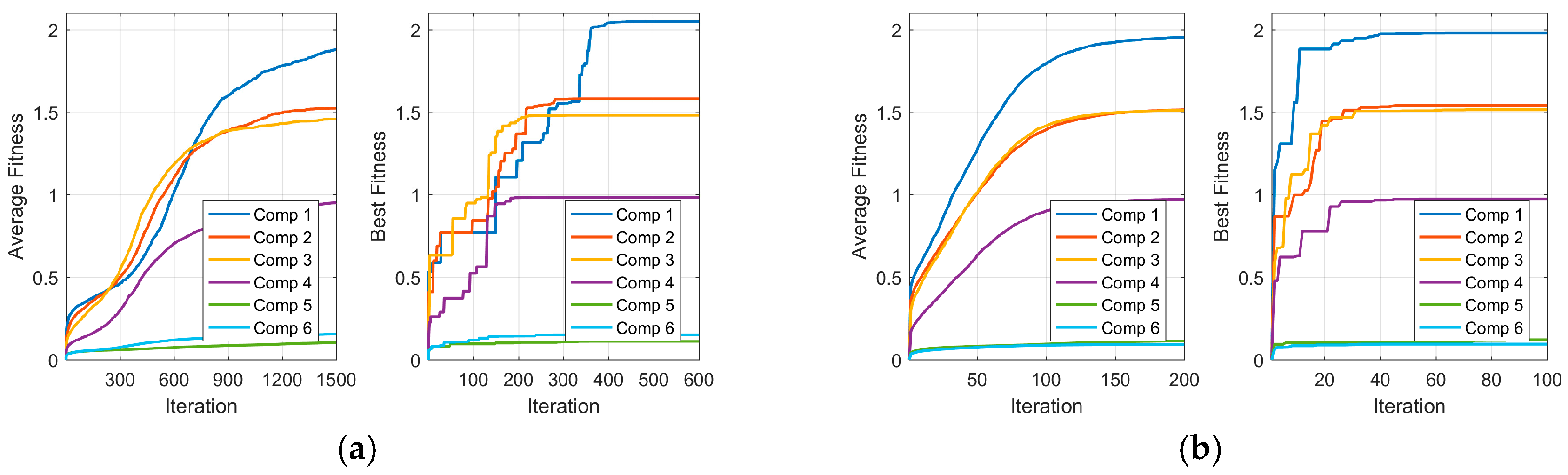
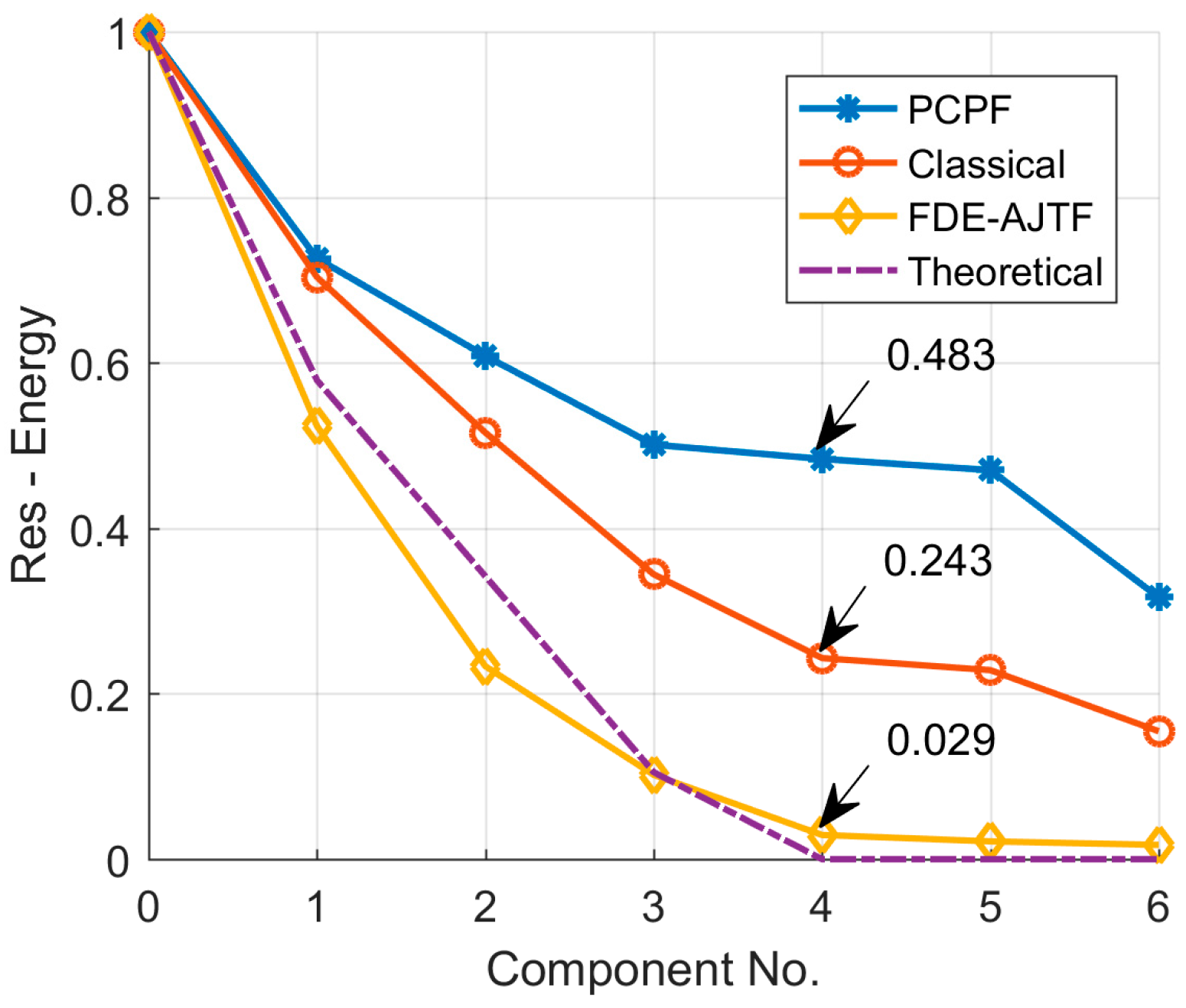
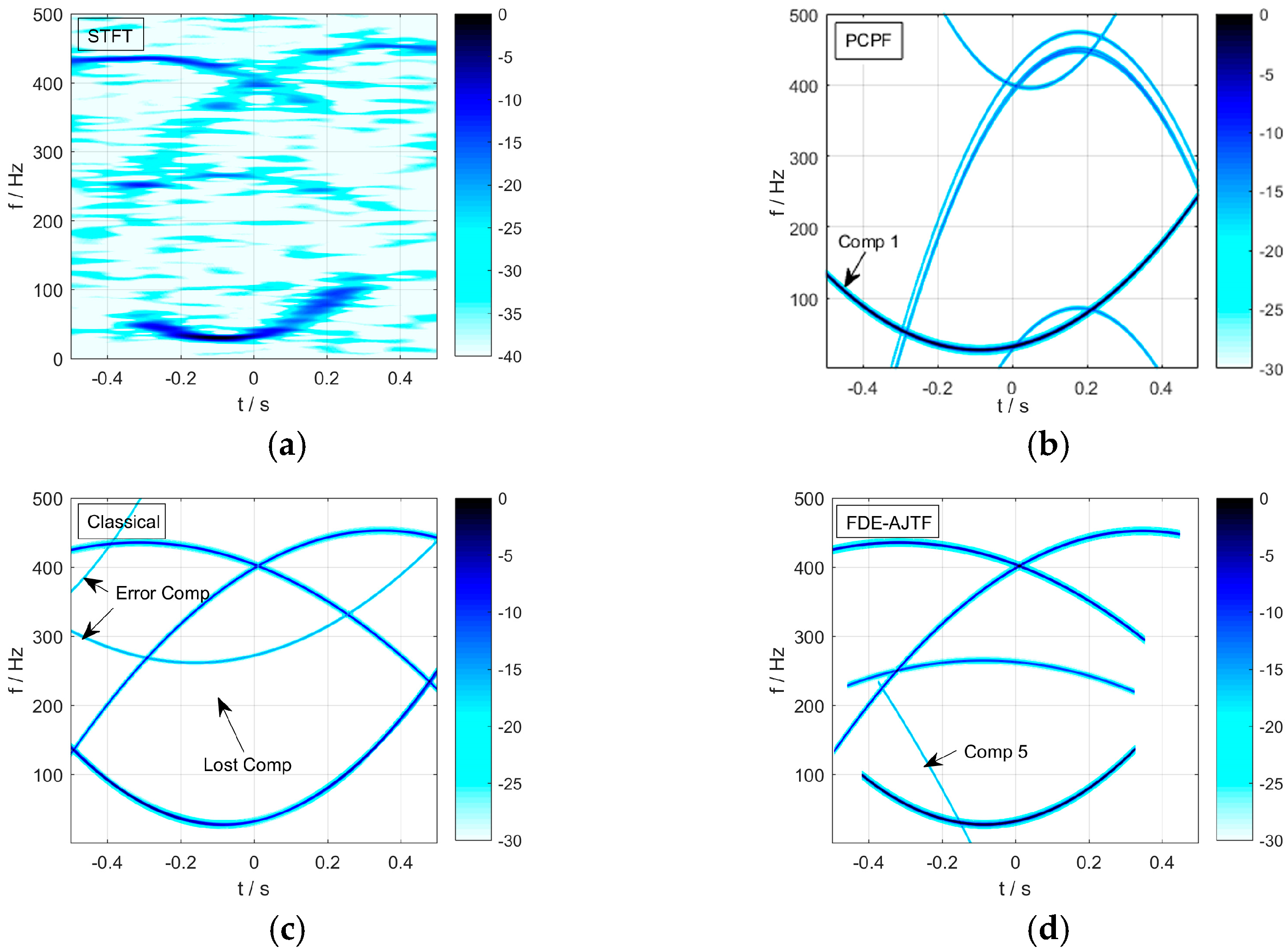
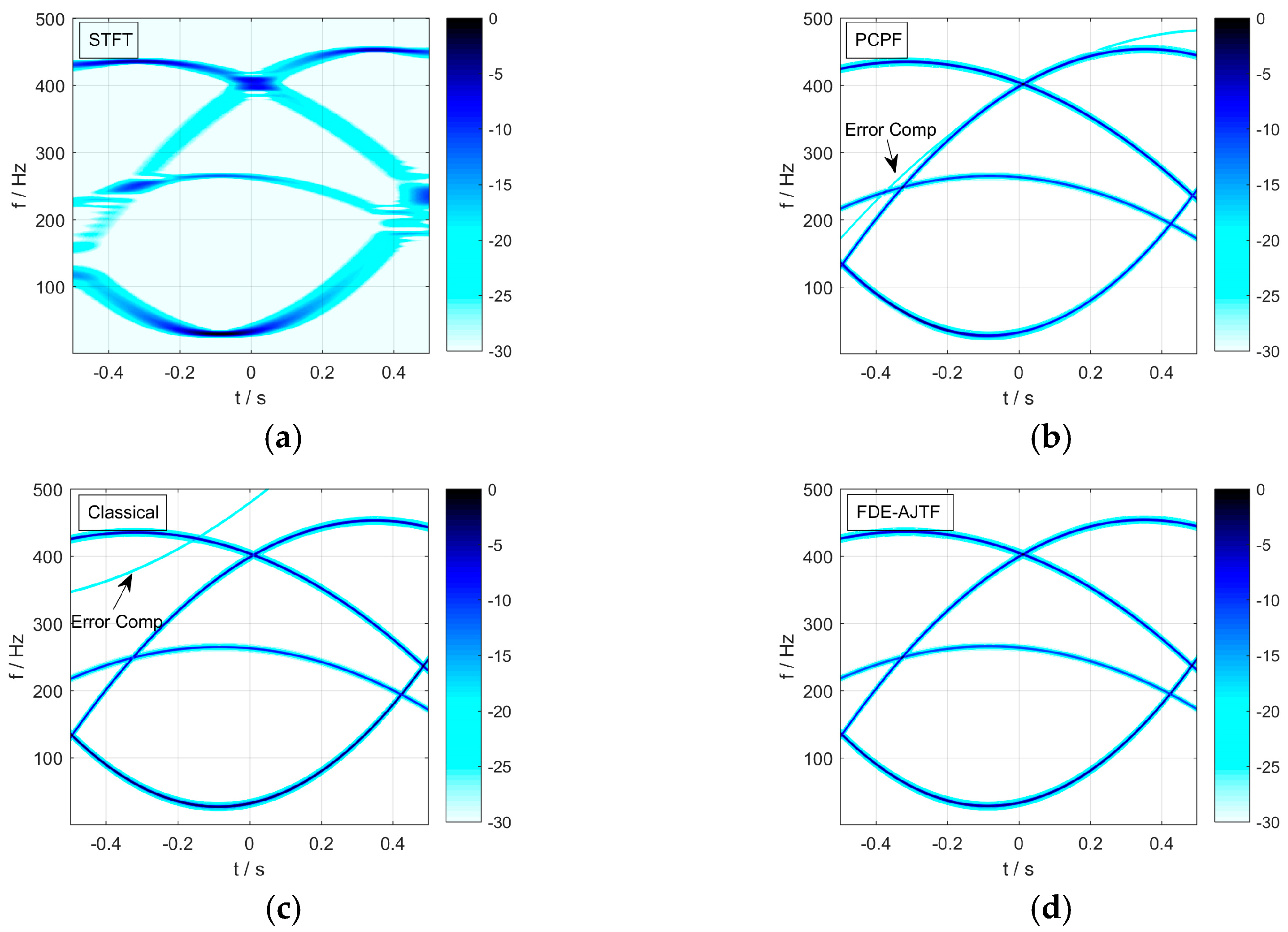
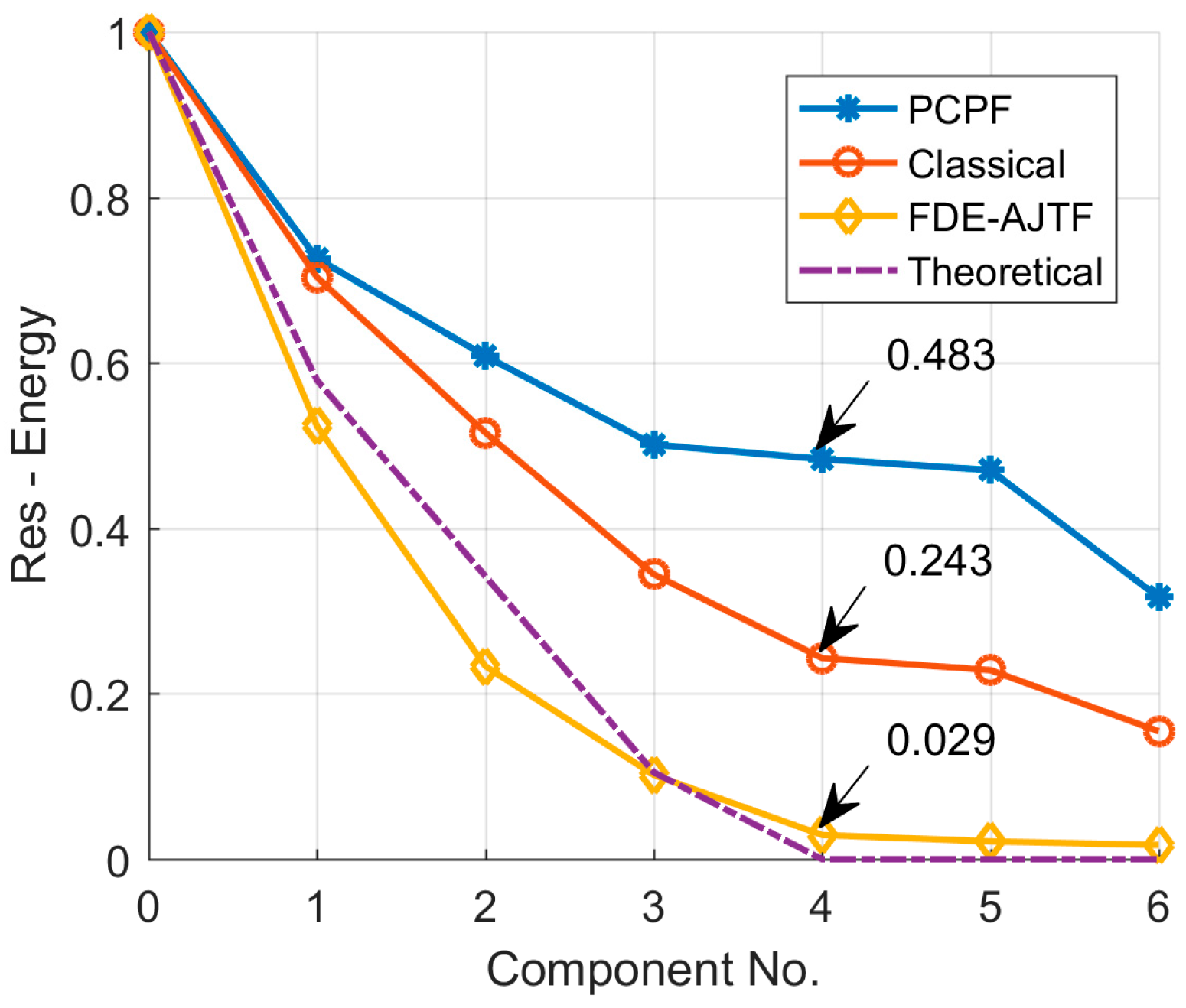
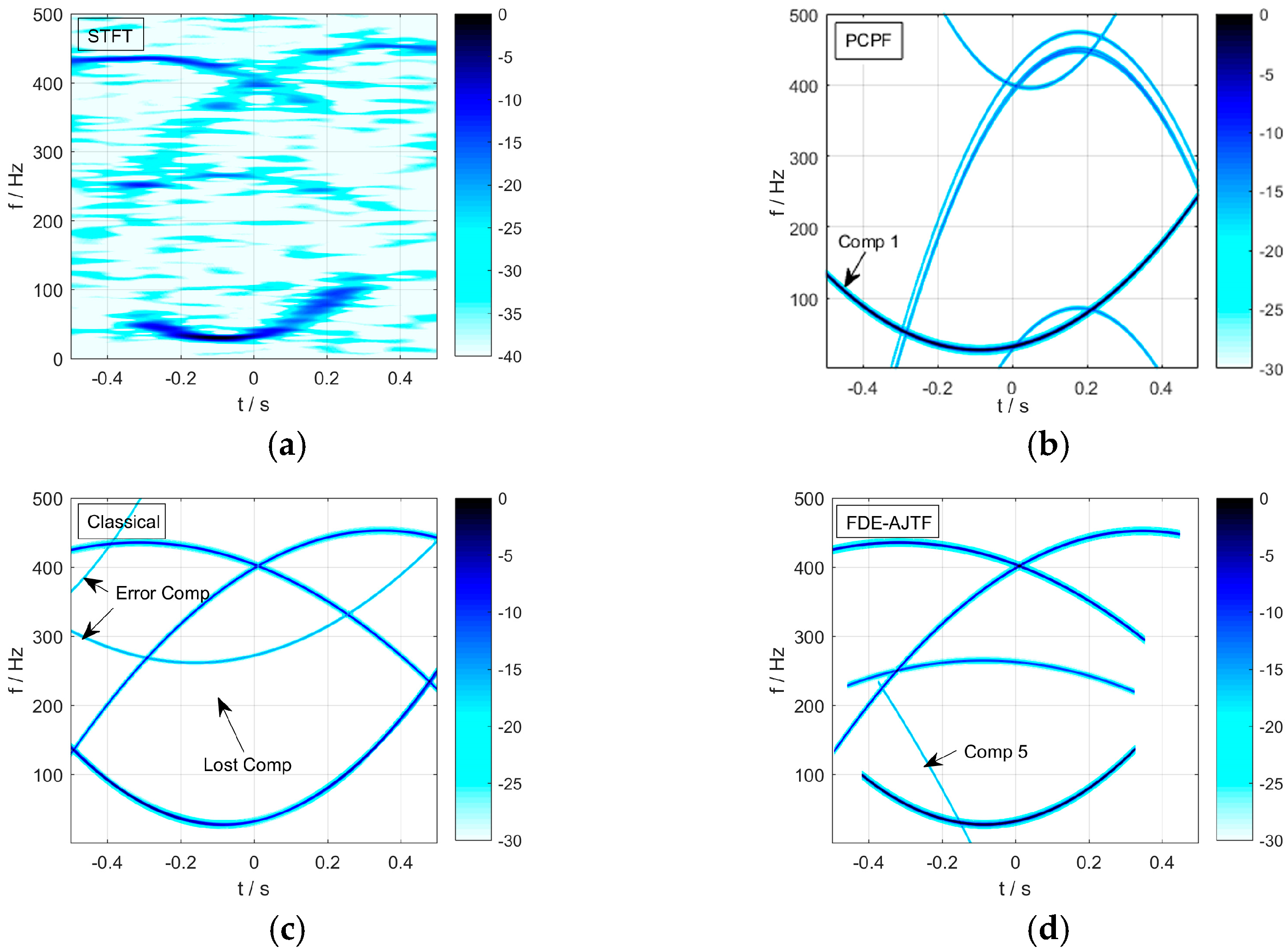
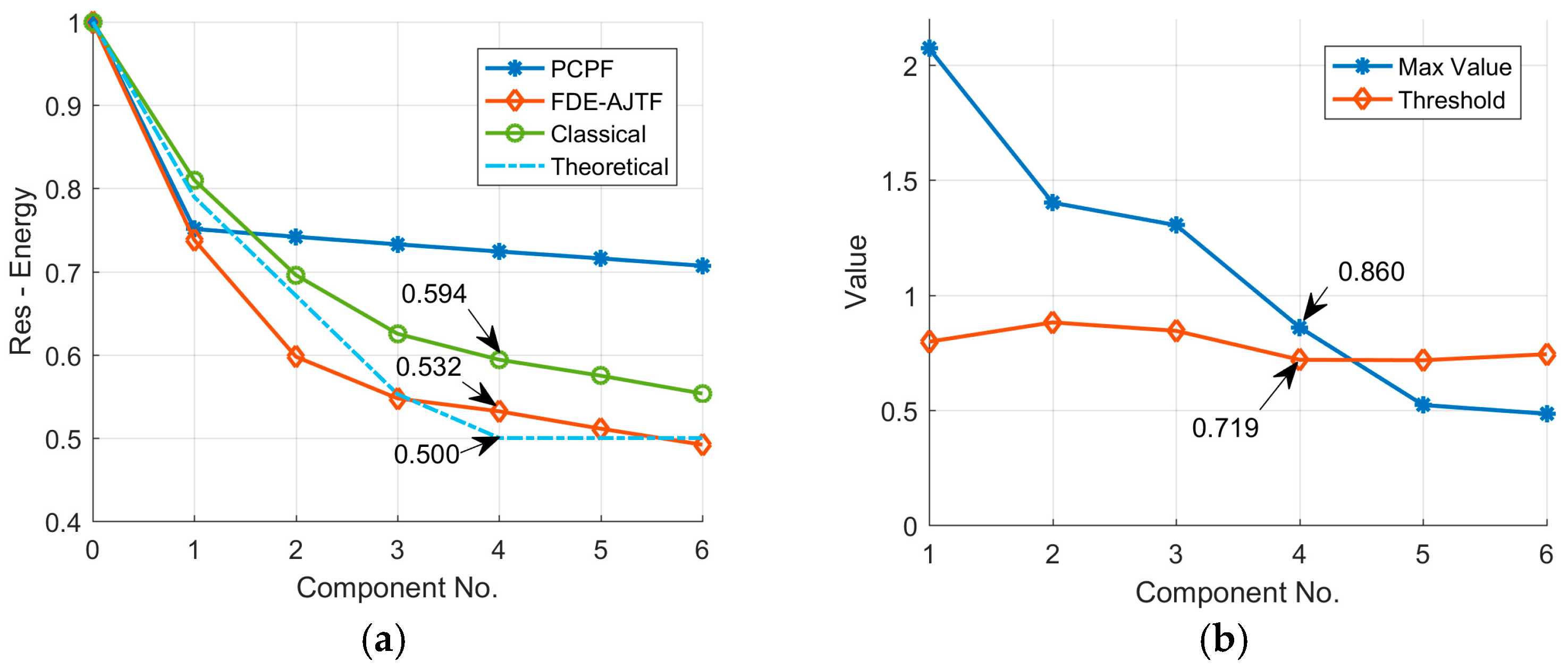
4.1.1. Comparison between Two Fitness and Component Extraction Modes in Classical and FDE AJTF Methods
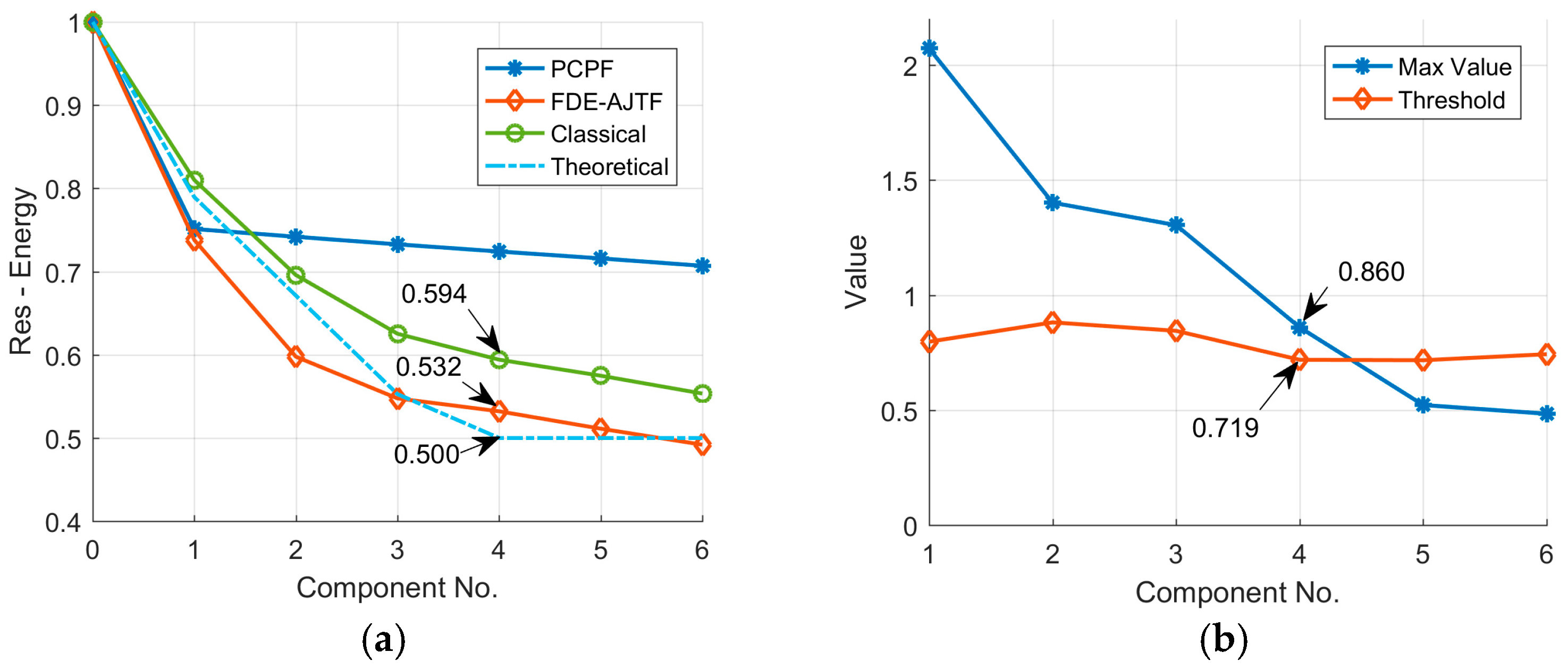
4.1.2. Comparison between the Basis Functions with and without Time Windows
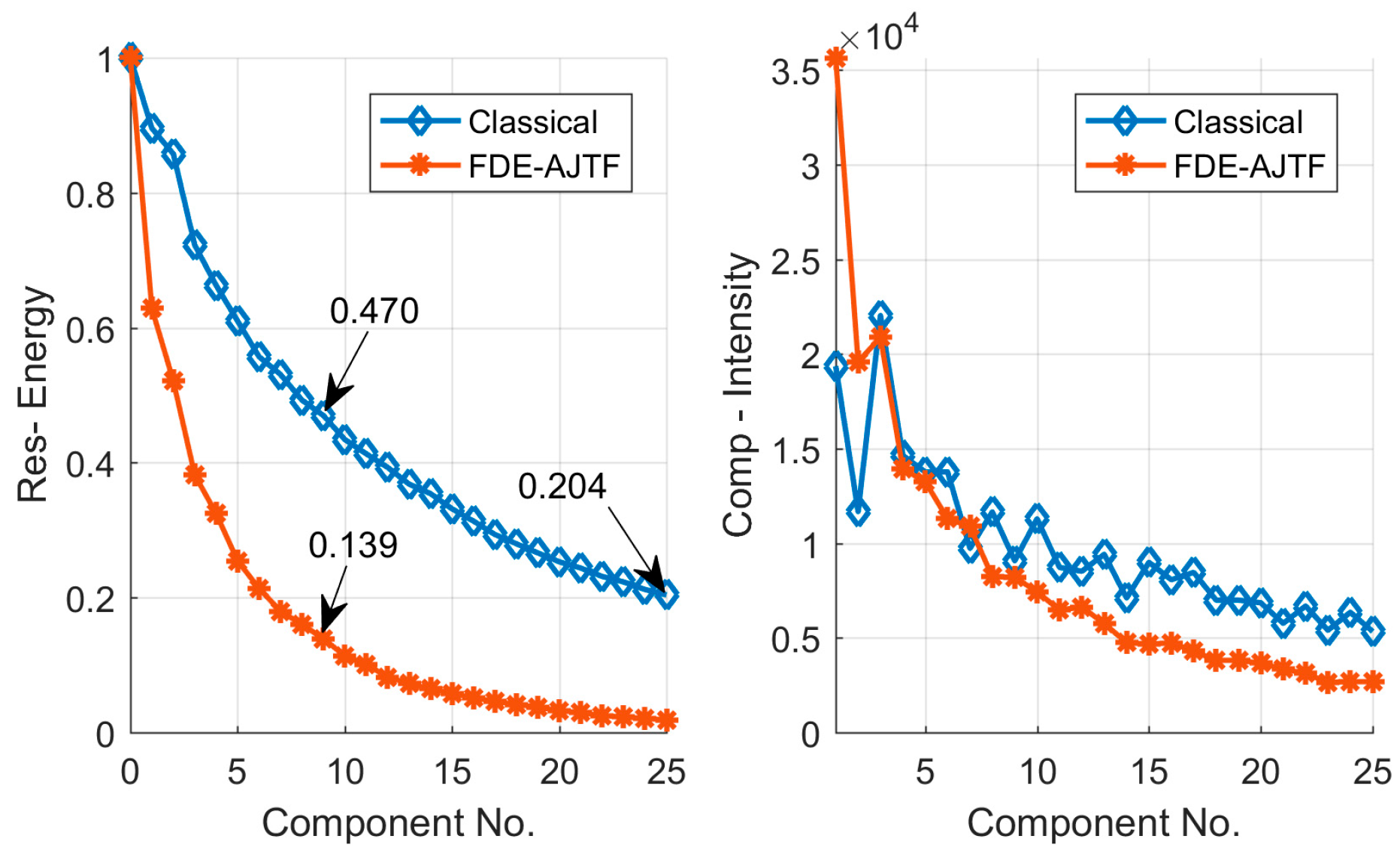
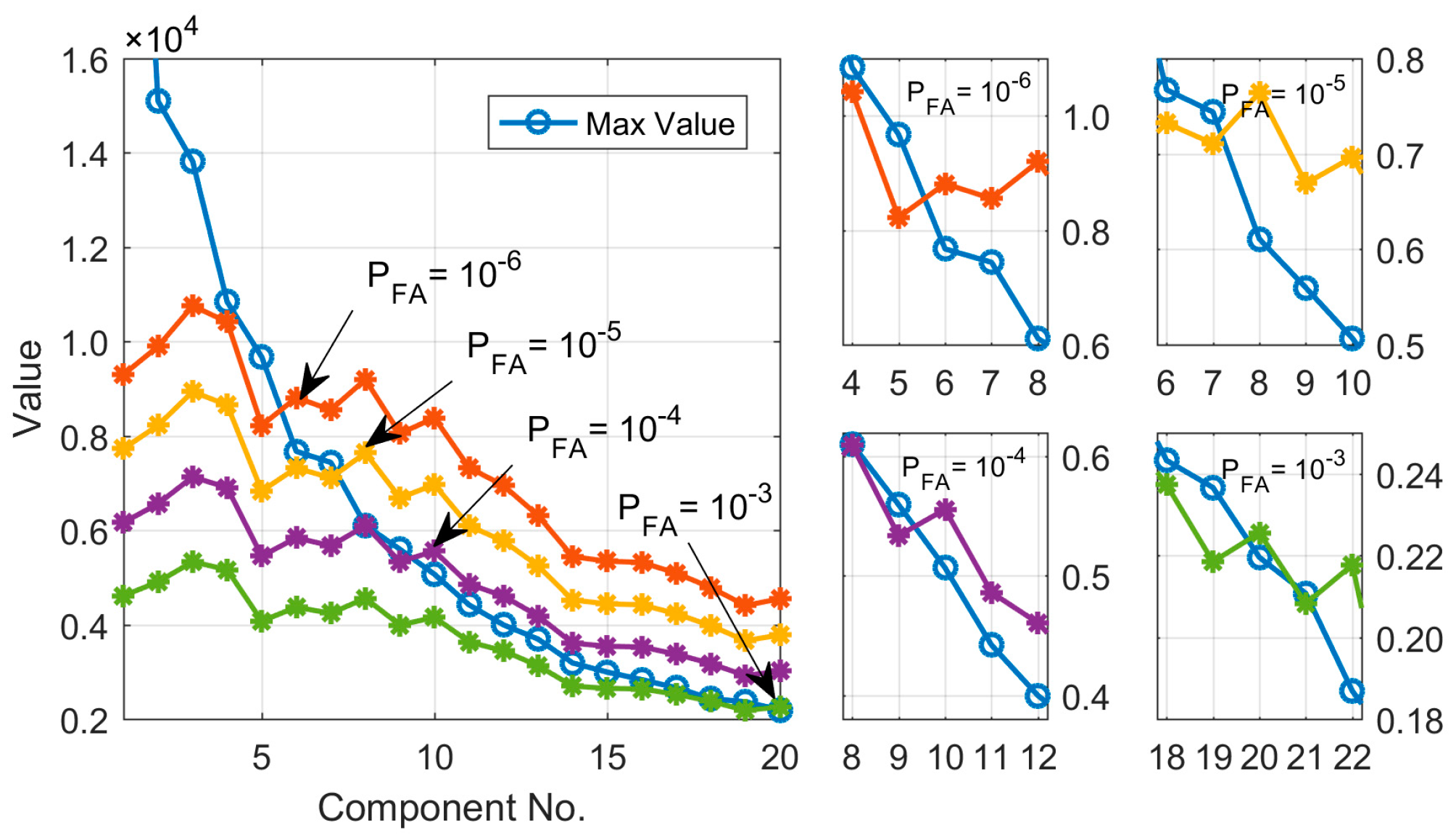
4.1.3. Comparison between Component Extraction with and without CFAR Detection
4.2. Experimental Test
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chen, V.C.; Li, F.; Ho, S.S.; Wechsler, H. Micro-Doppler effect in radar: Phenomenon, model, and simulation study. IEEE Trans. Aerosp. Electr. Syst. 2006, 42, 2–21. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, S.; Zhu, D.; Li, X. A novel speed compensation method for ISAR imaging with low SNR. Sensors 2015, 15, 18402–18415. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Jiang, Y. ISAR imaging of a ship target using product high-order matched-phase transform. IEEE Geosci. Remote Sens. Lett. 2009, 6, 658–661. [Google Scholar] [CrossRef]
- Lao, G.; Liu, G.; Wu, X. The modeling and simulation of spaceborne SAR moving vessel imaging based on Matlab class. In Proceedings of the International Conference on Frontiers of Manufacturing Science and Measuring Technology (FMSMT), Taiyuan, China, 24–25 June 2017; Atlantis Press: Paris, France, 2017; Volume 130, pp. 1583–1586, ISBN 978-94-6252-331-9. [Google Scholar]
- Barbarossa, S.; Scaglione, A.; Giannakis, G.B. Product high-order ambiguity function for multicomponent polynomial-phase signal modeling. IEEE Trans. Signal Process. 1998, 46, 691–708. [Google Scholar] [CrossRef]
- Pham, D.S.; Zoubir, A.M. Analysis of multicomponent polynomial phase signals. IEEE Trans. Signal Process. 2007, 55, 56–65. [Google Scholar] [CrossRef]
- Zhang, X. Modern Signal Processing, 3rd ed.; Tsinghua University Press: Beijing, China, 2015; pp. 294–310. ISBN 978-7-302-40869-7. [Google Scholar]
- Boashash, B.; Ristic, B. Polynomial time-frequency distribution and time-varying higher order spectra: Application to the analysis of multicomponent FM signals and to the treatment of multiplicative noise. Signal Process. 1998, 67, 1–23. [Google Scholar] [CrossRef]
- Sun, K.; Jin, T.; Yang, D. An Improved Time-Frequency Analysis Method in Interference Detection for GNSS Receivers. Sensors 2015, 15, 9404–9426. [Google Scholar] [CrossRef] [PubMed]
- Friedlander, B.; Francos, J.M. Estimation of amplitude and phase parameters of multicomponent signals. IEEE Trans. Signal Process. 1995, 43, 917–926. [Google Scholar] [CrossRef]
- Djurovic, I.; Stankovic, L. Quasi maximum likelihood estimator of polynomial phase signals. IET Signal Process. 2014, 13, 347–359. [Google Scholar] [CrossRef]
- Djurovic, I.; Simeunovic, M. Review of the quasi-maximum likelihood estimator for polynomial phase signals. Digit. Signal Process. 2018, 72, 59–74. [Google Scholar] [CrossRef]
- Peleg, S.; Porat, B. Estimation and classification of polynomial-phase signals. IEEE Trans. Inf. Theory 1991, 37, 422–430. [Google Scholar] [CrossRef]
- Wang, Y.; Abdelkader, A.C.; Zhao, B.; Wang, J. ISAR imaging of maneuvering targets based on the modified discrete polynomial-phase transform. Sensors 2015, 15, 22401–22418. [Google Scholar] [CrossRef] [PubMed]
- Jing, F.; Si, W.; Jiao, S. A hybrid LVD-HAF method of quadratic frequency-modulated signals. In Proceedings of the Applied Computational Electromagnetics Society Symposium, Italy (ACES), Florence, Italy, 26–30 March 2017; ISBN 978-1-5090-5335-3. [Google Scholar]
- Zheng, J.; Su, T.; Zhu, W.; Zhang, L.; Liu, Z.; Liu, Q. ISAR imaging of nonuniformly rotating target based on a fast parameter estimation algorithm of cubic phase signal. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4727–4740. [Google Scholar] [CrossRef]
- Djurovic, I.; Simeunovic, M.; Wang, P. Cubic Phase Function: A Simple Solution to Polynomial Phase Signal Analysis. Elsevier Signal Process. 2017, 135, 48–66. [Google Scholar] [CrossRef]
- Popovica, V.; Djurovica, I.; Stankovica, L.; Thayaparanb, T.; Dakovica, M. Autofocusing of SAR images based on parameters estimated from the PHAF. Signal Process. 2010, 90, 1382–1391. [Google Scholar] [CrossRef]
- Djurovic, I.; Simeunovic, M.; Djukanovic, S.; Wang, P. A hybrid CPF-HAF estimation of polynomial-phase signals: Detailed statistical analysis. IEEE Trans. Signal Process. 2012, 60, 5010–5023. [Google Scholar] [CrossRef]
- Djurovic, I.; Ioana, C.; Thayaparan, T.; Stankovic, L.; Wang, P.; Popovic, V.; Simeunovic, M. Cubic-phase function evaluation for multicomponent signals with application to SAR imaging. IET Signal Process. 2010, 4, 371–381. [Google Scholar] [CrossRef]
- Kulkarni, R.; Rastogi, P. Multiple phase estimation in digital holographic interferometry using product cubic phase function. Opt. Lasers Eng. 2013, 51, 1168–1172. [Google Scholar] [CrossRef]
- Trintinalia, L.; Ling, H. Joint time-frequency ISAR using adaptive processing. IEEE Trans. Antennas Propag. 1997, 45, 221–227. [Google Scholar] [CrossRef]
- Qian, S.; Chen, D. Signal representation using adaptive normalized Gaussian functions. Signal Process. 1994, 36, 1–11. [Google Scholar] [CrossRef]
- Mallat, S.G.; Zhang, Z. Matching pursuits with time-frequency dictionaries. IEEE Trans. Signal Process. 1993, 41, 3397–3415. [Google Scholar] [CrossRef]
- Thayaparan, T.; Brinkman, W.; Lampropoulos, G. Inverse synthetic aperture radar image focusing using fast adaptive joint time–frequency and three-dimensional motion detection on experimental radar data. IET Signal Process. 2010, 4, 382–394. [Google Scholar] [CrossRef]
- Yang, G.; He, Z. Improvement for ISAR Imaging Algorithms of Ship Targets. Mod. Def. Technol. 2013, 1, 47–52. [Google Scholar] [CrossRef]
- Brinkman, W.; Thayaparan, T. Focusing inverse synthetic aperture radar images with higher-order motion error using the adaptive joint-time-frequency algorithm optimised with the genetic algorithm and the particle swarm optimisation algorithm-comparison and results. IET Signal Process. 2010, 4, 329–342. [Google Scholar] [CrossRef]
- Li, Y.; Fu, Y.; Li, X.; Lewei, L. ISAR imaging of multiple targets using particle swarm optimization—Adaptive joint time frequency approach. IET Signal Process. 2010, 4, 343–351. [Google Scholar] [CrossRef]
- Qian, S. Introduction to Time-Frequency and Wavelet Transforms; China Machine Press: Beijing, China, 2005; pp. 142–143. ISBN 7-111-15834-2. [Google Scholar]
- Wu, D. Analysis of Signals and Linear Systems, 4th ed.; Higher Education Press: Beijing, China, 2005; pp. 150–152. ISBN 978-7-04-017401-4. [Google Scholar]
- Bao, Z.; Xing, M.; Wang, T. Radar Imaging Technology; Publishing House of Electronics Industry: Beijing, China, 2005; pp. 95–97, 142–143. ISBN 7-121-01072-0. [Google Scholar]
- Hu, G. Digital Signal Processing, 3rd ed.; Tsinghua University Press: Beijing, China, 2015; pp. 269–273. ISBN 978-7-302-29757-4. [Google Scholar]
- Richards, M.A. Fundamentals of Radar Signal Processing, Simplified Chinese Translation Edition; Publishing House of Electronics Industry: Beijing, China, 2008; pp. 260–268. ISBN 978-7-121-06896-6. [Google Scholar]
- Hassan, R.; Cohanim, B.; Weck, O.D.; Venter, G. A comparison of particle swarm optimization and the genetic algorithm. In Proceedings of the AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics & Materials Conference, Austin, TX, USA, 18–21 April 2005. [Google Scholar] [CrossRef]
- Dorigo, M.; Stutzle, T. Ant Colony Optimization; Simplified Chinese Translation Edition; Tsinghua University Press: Beijing, China, 2007; pp. 65–68. ISBN 978-7-302-13887-7. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Intensity | a1 | a2 | a3 | Energy Ratio | |
|---|---|---|---|---|---|
| Component 1 | 2.0 | 32.1 | 55.6 | 212.4 | 42.11% |
| Component 2 | 1.5 | 398.2 | 156.6 | −149.3 | 23.68% |
| Component 3 | 1.5 | 403.9 | −98.2 | −102.2 | 23.68% |
| Component 4 | 1.0 | 262.8 | −23.1 | −91.5 | 10.53% |
| Classical AJTF | FDE-AJTF | ||||
|---|---|---|---|---|---|
| Signal Length | 512 | 512 | |||
| Dimension | 3 | 2 | |||
| Particle | 500 | 500 | |||
| Iteration | 1500 | 200 | |||
| Fitness calculate once | Add | 500 | 4608 | ||
| Multiply | 500 | 2304 | |||
| Velocity update once | Add | 6000 | 4000 | ||
| Multiply | 7500 | 5000 | |||
| Position update once | Add | 1500 | 1000 | ||
| Multiply | 1500 | 1000 | |||
| Total computation | Add | ||||
| Multiply | |||||
| Ratio | Add | 6.25 | 1 | ||
| Multiply | 8.60 | 1 | |||
| Start (s) | End (s) | |
|---|---|---|
| Component 1 | −0.3 | 0.3 |
| Component 2 | −0.5 | 0.5 |
| Component 3 | −0.5 | 0.2 |
| Component 4 | −0.4 | 0.4 |
| Intensity | SNR (dB) | SCNR (dB) | Energy Ratio | |
|---|---|---|---|---|
| Component 1 | 2.0 | −3.75 | −5.74 | 21.05% |
| Component 2 | 1.5 | −6.25 | −8.72 | 11.84% |
| Component 3 | 1.5 | −6.25 | −8.72 | 11.84% |
| Component 4 | 1.0 | −9.78 | −12.56 | 5.26% |
| Noise | 50.00% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lao, G.; Yin, C.; Ye, W.; Sun, Y.; Li, G. A Frequency Domain Extraction Based Adaptive Joint Time Frequency Decomposition Method of the Maneuvering Target Radar Echo. Remote Sens. 2018, 10, 266. https://doi.org/10.3390/rs10020266
Lao G, Yin C, Ye W, Sun Y, Li G. A Frequency Domain Extraction Based Adaptive Joint Time Frequency Decomposition Method of the Maneuvering Target Radar Echo. Remote Sensing. 2018; 10(2):266. https://doi.org/10.3390/rs10020266
Chicago/Turabian StyleLao, Guochao, Canbin Yin, Wei Ye, Yang Sun, and Guojing Li. 2018. "A Frequency Domain Extraction Based Adaptive Joint Time Frequency Decomposition Method of the Maneuvering Target Radar Echo" Remote Sensing 10, no. 2: 266. https://doi.org/10.3390/rs10020266
APA StyleLao, G., Yin, C., Ye, W., Sun, Y., & Li, G. (2018). A Frequency Domain Extraction Based Adaptive Joint Time Frequency Decomposition Method of the Maneuvering Target Radar Echo. Remote Sensing, 10(2), 266. https://doi.org/10.3390/rs10020266