1. Introduction
A coastline is defined as the boundary between land and water. It is an important and dynamic linear feature [
1]. An accurate delineation of coastline can be used in coastal zone management and planning. A large percentage of the world’s population lives in coastal areas. Hence, these areas are under intense pressure from urban growth, industry and tourism [
2]. A prerequisite for sustainable management of these environmentally sensitive areas is the availability of accurate and up-to-date information on the status and extent of change. For countries with large coastal areas, such as Malaysia, nautical products are useful sources of such information for military management and coastal zone management and planning [
3].
An active radar product interacts differently with surface features from passive optical imagery [
4], and it can also penetrate through clouds [
5]. Radar imagery provides a large amount of useful information in terms of structure and shape rather than surface reflectance [
6,
7]. Therefore, they are valuable for many applications, such as disaster and natural resource management [
3,
8]. The information stored in multiple SAR polarisations may help reduce uncertainties in water delineation, which needs an optimised classification method other than single band image processing [
9]. Any developed and soft coastlines, such as Peninsula lands, always have a continuous demand for an up-to-date, accurate and detailed map of the coastline [
2]. Generally speaking, beaches have a dynamic change; thus, coastal zone monitoring is important for shoreline protection [
10,
11]. Field applications that rely on important tasks of shoreline change detection and monitoring include regional sediment yield, erosion–accretion, hazard zoning and setback planning [
1,
12].
Traditional field surveying methods by theodolites, GPS receivers, etc. are time-consuming and costly compared with remote sensing and geographical information system (GIS)-based methods [
3,
13]. Satellite imagery becomes one of the most useful sources of information for coastal monitoring [
14]. However, in tropical regions, frequent cloud coverage is a major issue in optical satellite imagery and brings difficulty in delineation of land and ocean boundaries [
15]. Identification of land and ocean boundaries is complicated using optical imagery due to cloud coverage [
16]. The recent systematic tools of remote sensing and GIS are exceptionally important for coastal environmental studies and coastal zone management and planning [
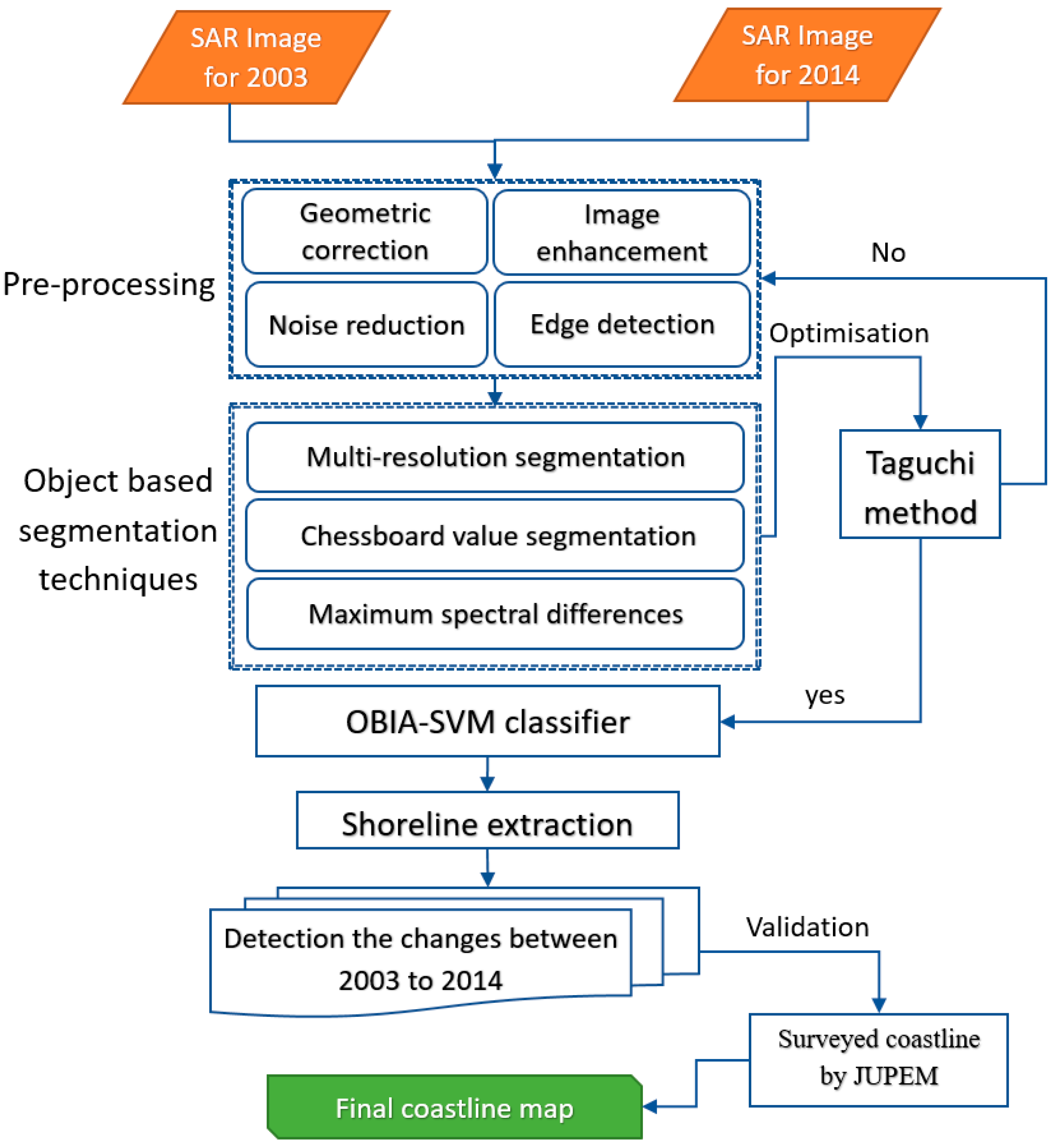
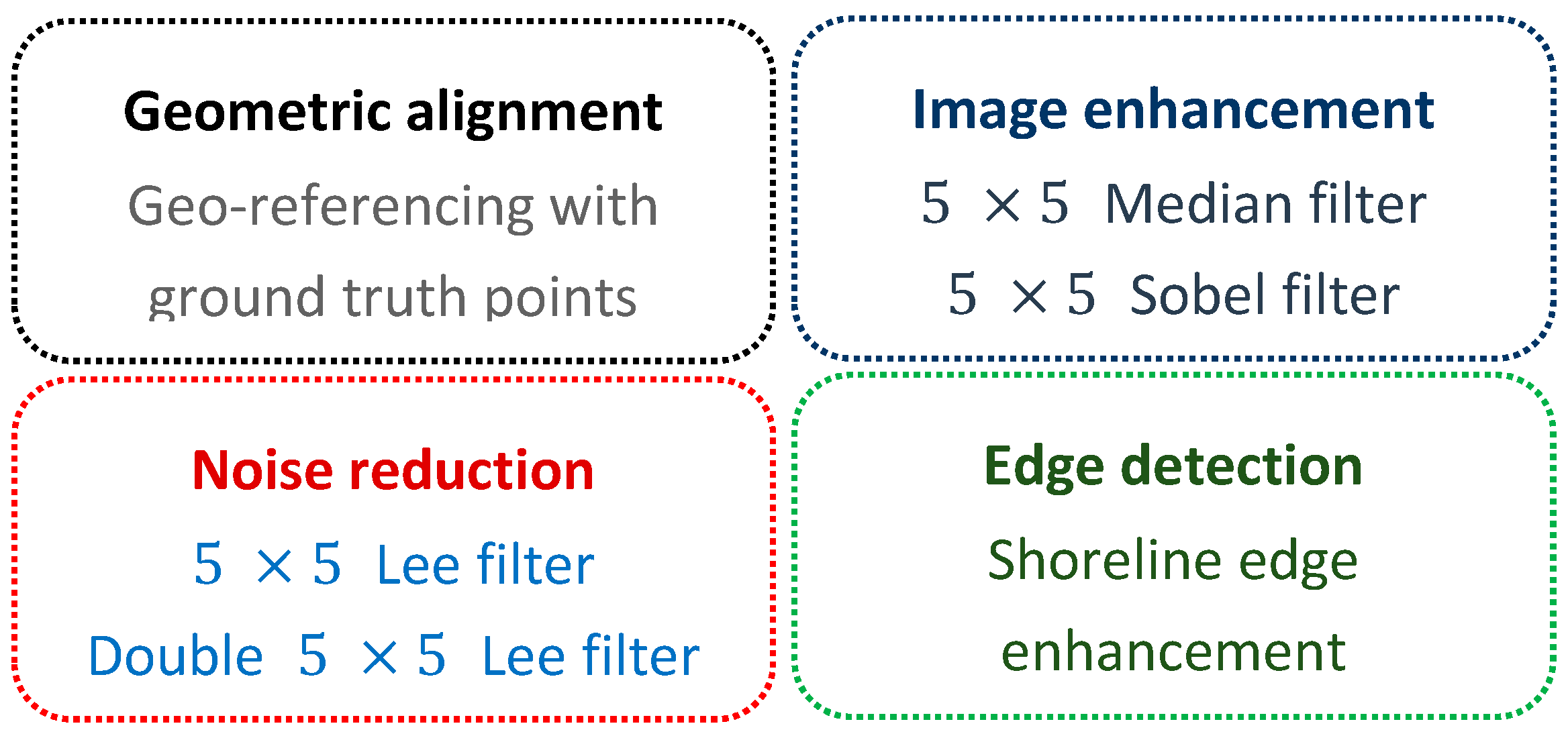
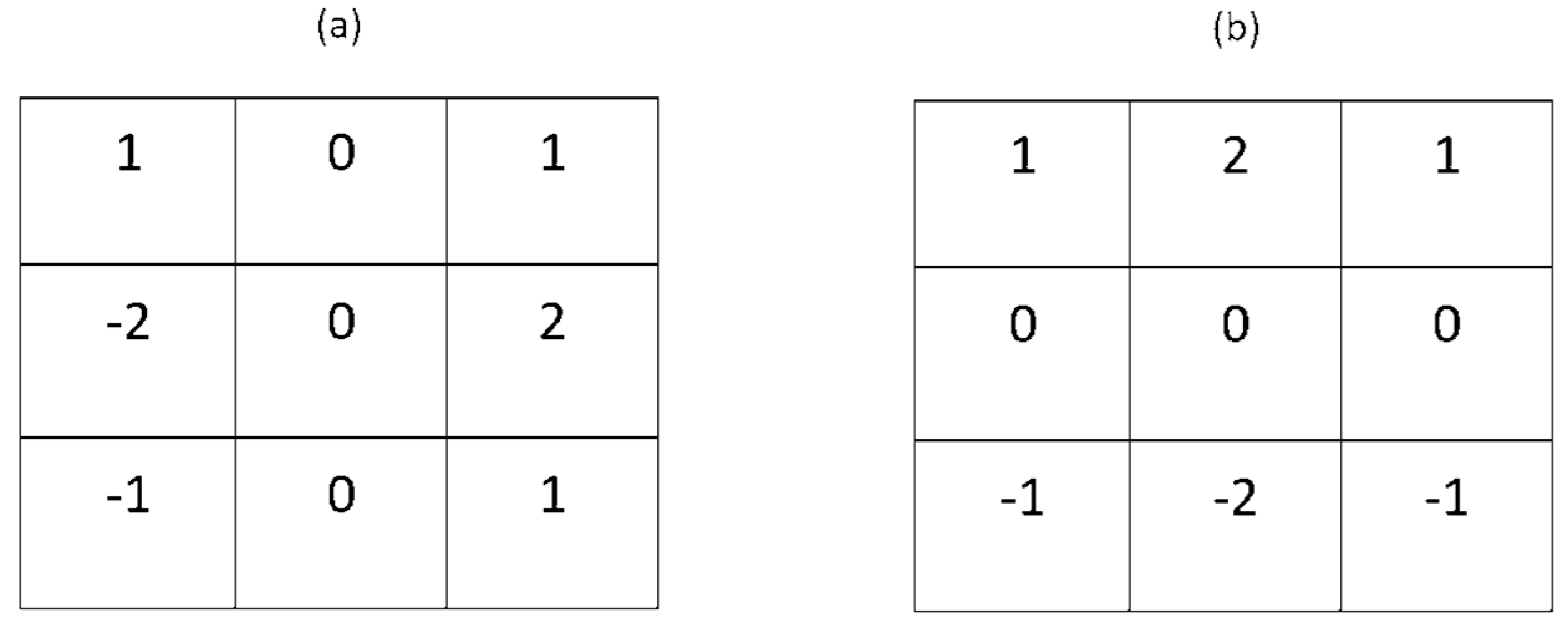
17]. However, monitoring coastline changes using synthetic aperture radar (SAR) images during high and low tides is challenging due to the mixed backscattering response resulting from the variation of wet and dry sands. This leads to misclassification problem when dealing with SAR image.
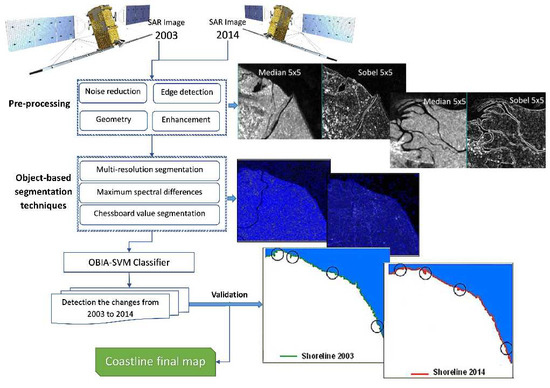
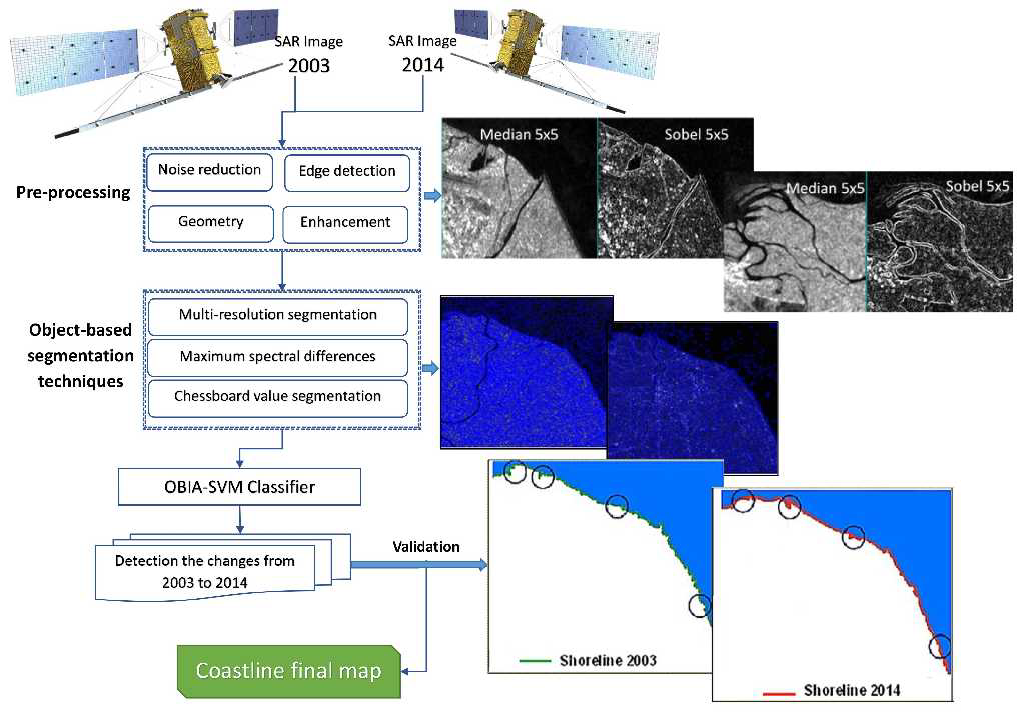
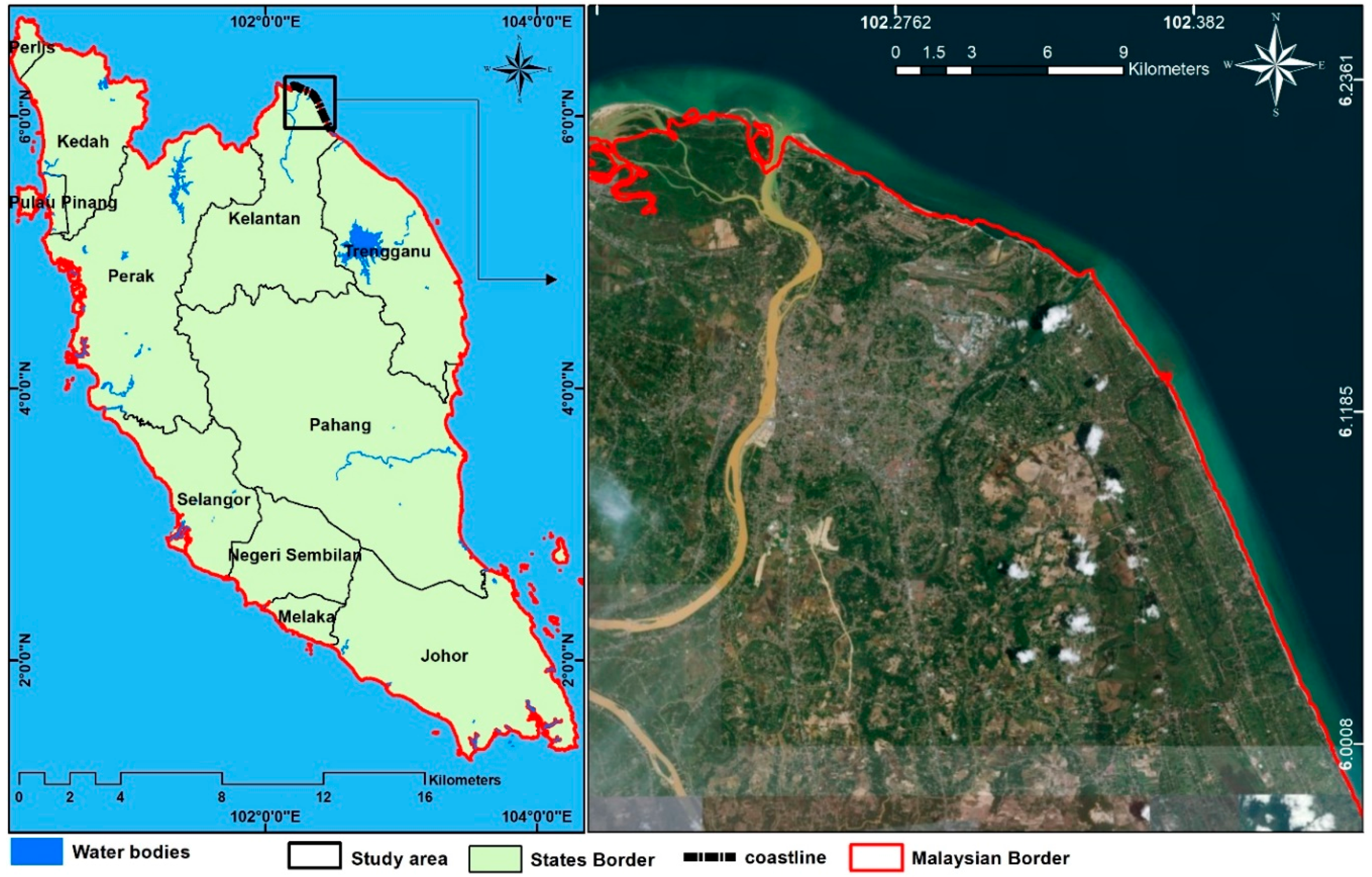
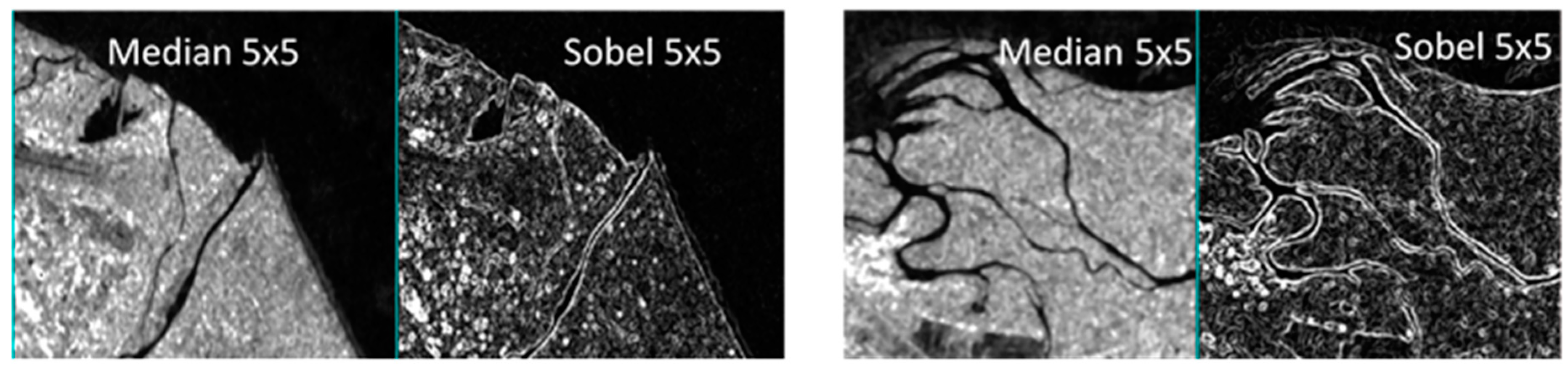
This research aims to identify the shoreline and assess the magnitude and direction of shoreline changes from 2003 to 2014 using SAR images. This study attempts to propose an optimised semiautomatic coastline detection method using temporal SAR images, which are subjected to notable environmental parameters, such as wind and large amounts of textural noise over the sea surface. We processed the SAR dataset to detect and monitor changes along the east coast of Kelantan, Malaysia, using two sets of RADARSAT images. The noises on SAR imagery were filtered out, and an adequate technique was then developed to discriminate lands from those noises. This process is critical in feature detection using SAR images, especially in coastal areas.
3. Results
3.1. Segmentation Results
Numerous image categorisation approaches have been used for coastal extraction [
1,
3,
33]. In the current study, MSA, maximum spectral difference and chessboard segmentation were used in eCognition platform. The segmentation parameters were adjusted to determine the optimal size and shape of the divided objects using the Taguchi method. The scale factor describes the determined standard deviation of homogeneity in relation to the produced image-weight layers [
34]. In general, the magnitude of the larger scale is larger than the size of the objects, and the heterogeneity is high. In this study, we considered the domain variation (possible maximum and minimum) of five segmentation parameters, namely, scale, compactness, shape and maximum spectral difference and chessboard value, to determine their effect on segmentation accuracy. In normal calculation, the most ideal value of parameters should be discovered out of 1024 possibilities; however, by applying the Taguchi method, the ideal values can be retrieved from less number of possibilities (i.e., 25), which shrink the procedure efficiently. L25 is orthogonal array with 25 levels of experiments, and L1024 is orthogonal array with 1024 levels of experiments. The orthogonal array, calculated as L25, was used amongst all L1024 possibilities. Consequently, the highest SNR value indicates the best value for segmentation parameters (
Table 5).
After numerous experiments in this stage, the optimal result for the imagery was achieved when the scale and maximum spectral difference values were 50, the shape and compression parameters were 0.9 and the chessboard value was 20 (
Table 5).
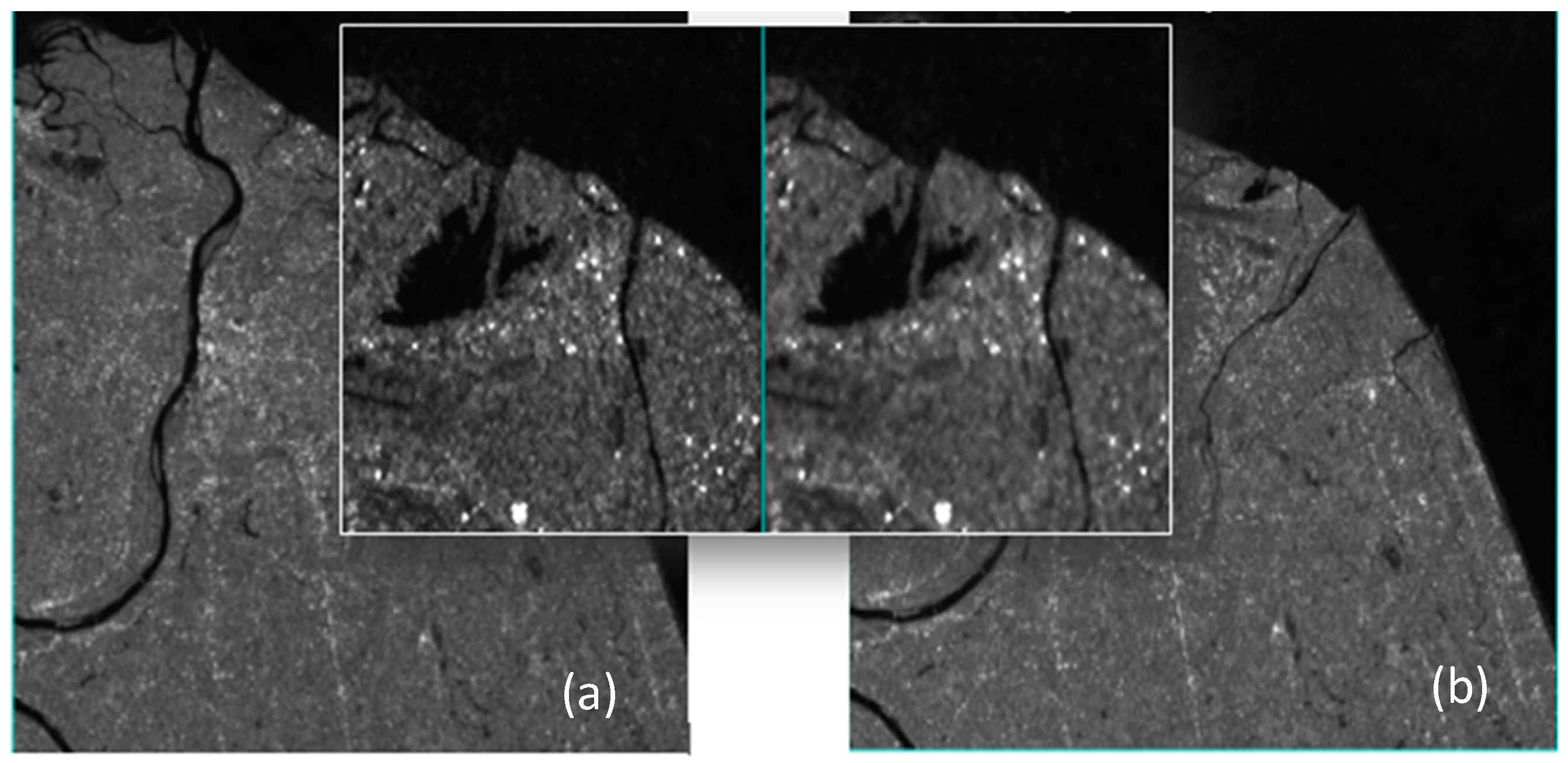
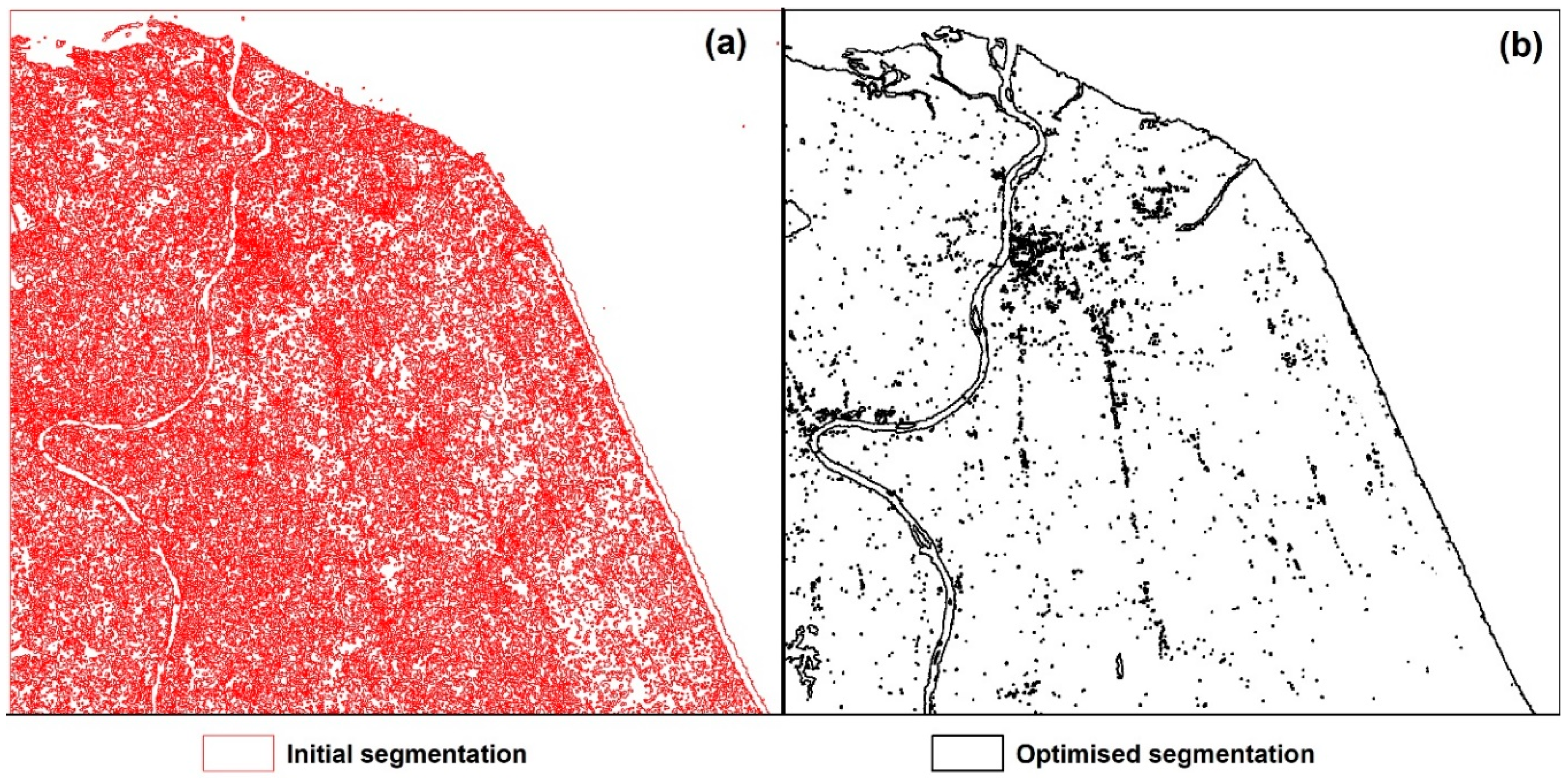
Figure 8 shows the segmentation result based on the selected parameters. Defining the ideal segmentation threshold is one of the main steps in our model towards automation, which can be applied on similar environment and climate to accurately classify land from water. The optimisation process on different imageries and conditions is subjected to size, pattern and tone of environmental features.
The size of polygon boundaries indicates the result of segmentation (
Figure 8). The initial segmentation results that came from basic MSA, maximum spectral difference and chessboard segmentation methods showed too many unessential segments, particularly in land and shoreline border. The feature classes, such as water and land, could not be separated accurately using the initial segmentation result; therefore, shoreline border identification was also not precise (
Figure 8a). However, after optimising the segmentation parameters, the segments were well defined. The fittest segments for features (e.g., land and water) on the images were generated due to the optimal selection of the scale, shape, compactness, spectral difference and chessboard values. This optimised method could remove the unessential and small segments that caused uncertainty in classification (
Figure 8b). The optimised segmentation helped the SVM classifier gain a consistent classified map.
3.2. SAR Classification Results
When the sample size in each individual class was less than 25, the accuracy of the classes was unsatisfactory. When the sample size increased to 80, the highest accuracy in classification was obtained. The SVM uses support vectors instead of all the training protocols to make the isolation hyperplane. Therefore, the number of training samples may affect the classification accuracy. In the current experiment, a sample size of 80 in each class was considered ideal; beyond this value, size would not essentially lead to a considerable increase in the degree of accuracy of the classification.
The 2003 classified map was assessed by 30 ground control points (GCPs) for each class that distributed randomly all over the scene. These GCPs were collected from a classified Landsat image in November 2003. On the contrary, the 2014 classified map was assessed by 30 GCPs for each class that were collected from Digital Globe imagery (Google Earth) on November 2014. A reliable thematic map with the highest overall classification accuracy was used as the reference to determine the exact accuracy of the implemented classification [
35,
36]. We stratified randomly selected sample training and experimentation for both images to evaluate overall accuracy of classification with optimal parameter values (
Table 6). On the basis of the error matrix of the thematic maps, we calculated Z-statistics to assess the difference in the results of the classification between the two categories [
37].
3.3. Quantitative Assessment of Detected Changes
Frequent shoreline monitoring and accurate change detection are vital for understanding coastal procedures and various dynamics of the coastal characteristics. Coastal position is an important geographical indicator in coastal development and provides useful information on the dynamics of coastal morphology [
38]. Therefore, accurate detection and monitoring of the coastal area are essential for recognising coastal processes and the dynamics of various coastal characteristics.
A quantitative assessment of the metrics and pattern of temporal shoreline dynamics should be applied on specific transects on the shoreline retrieved from the RADARSAT images. Area and length of shorelines were measured to indicate the magnitude of shoreline temporal changes (
Table 7).
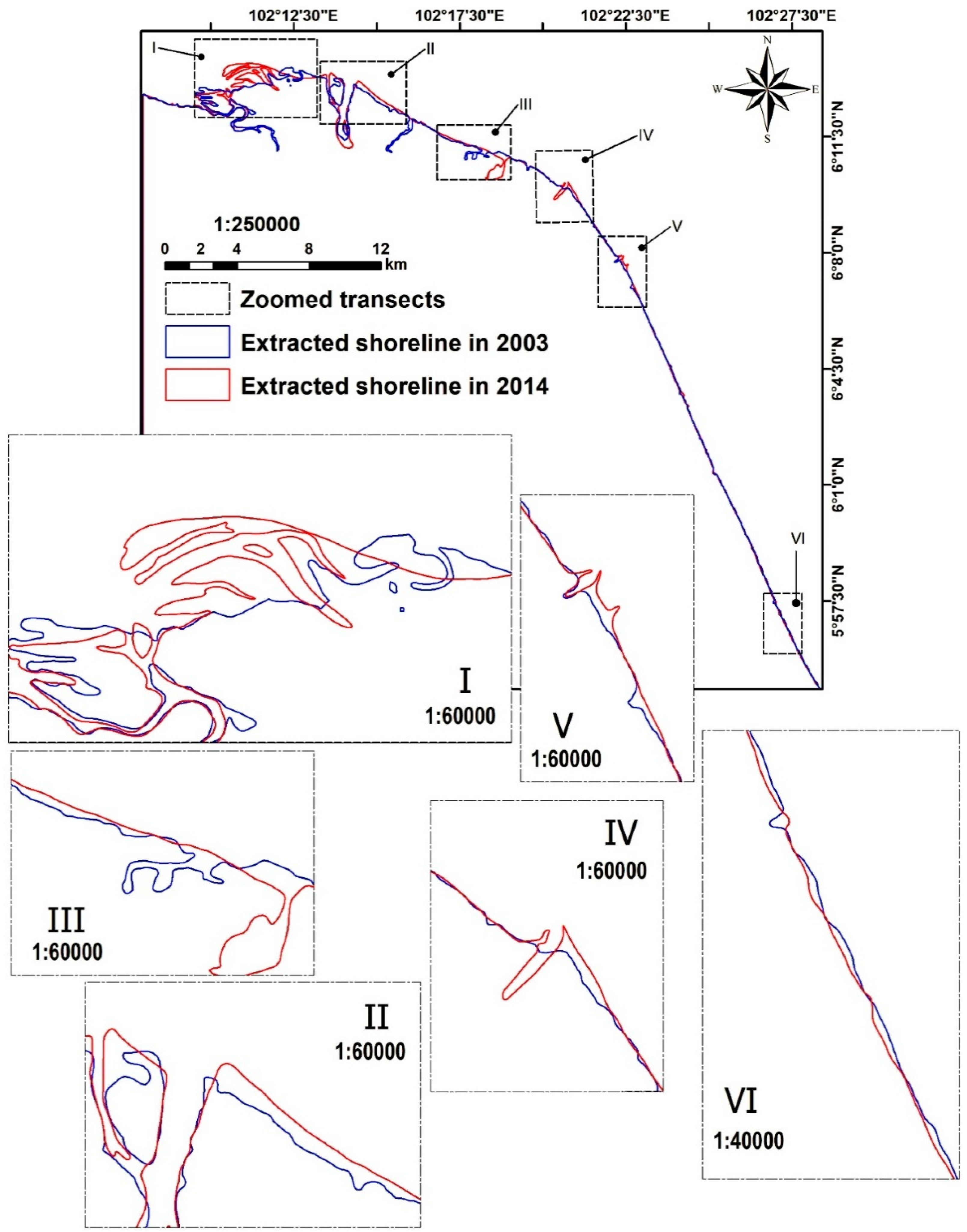
The changes were calculated by measuring the observed distances between the shorelines of 2003 and 2014. Notably, the shoreline had shifted towards the northeast and had slightly shifted to the southeast side of the coast by 12.8 m in average (
Figure 9). Considering the shoreline morphological pattern, the shoreline in 2003 was straighter than the shoreline in 2014. Overall, the coastal length increased from 101.50 km to 115.22 km during the period of 2003 to 2014. To be more specific, the change detection analysis was conducted in six transects in which it had experienced significant changes. In each transect, the magnitude of the changed area was measured on the basis of onshore, offshore and no changes calculation. Onshore changes reflect the movement of the sea towards land, causing erosion. However, offshore changes happen where the sea is pushed back from land, resulting in accretion.
During the given period, the shoreline experienced less dynamics in transects VI and V where 96.5 and 96.0 percentage of shoreline remains unchanged, respectively. Particularly, the shoreline in transect I and nearby areas had not changed remarkably. However, most changes had occurred in transect I where just 75.6% of shoreline area remained unchanged. In transect I, almost 248 hectares were added to shore areas, while 106 hectares were removed from shore area from 2003 to 2014. Basically, the onshore and the offshore variation were noticeable in all the measured transects. In transect VI and III, the number of offshore change was more than other transects (i.e., 0.4 and 0.6 percentage), which indicated the eroded shoreline. In transects I, II, IV and V, offshore change was detected more than onshore change (
Table 7).
3.4. Validation
The delineated 2003 shoreline was validated by overlaying the surveyed shoreline from JUPEM, while the delineated 2014 shoreline was validated by Digital Globe satellite imagery from Google Maps. The referenced images provided details on the area and position information over the area, such as the coordinate. Accordingly, we compared this shoreline with the extracted shoreline for accuracy assessment. Comparison analysis of the extracted shoreline with the referenced shorelines were placed in 32 random, well-distributed transects along the border for 2003 and 2014 (
Table 8).
In 2003, the recorded minimum distance between both shorelines was 0.22 m, whereas the maximum drift was 7.85 m. The average distance of differential for every point was 2.56 m. The range of differences was up to 1.69 m. In 2014, the recorded minimum distance between both shorelines was zero metre, whereas the maximum drift was 6.13 m. The average distance of differential for every point was 1.35 m. The range of differences was up to 1.69 m. The validation results showed a considerable correlation between referenced shorelines and extracted ones. However, in 2014, we observed high similarity between the two shorelines that might be due to the higher quality of RADARSAT-2 compared to the first product of RADARSAT.
After validation analysis, the final shoreline border of 2014 was calibrated. From the observation and analysis, we found that accurate measurement of the differences needed to be quantified using approximately the same level of the tidal condition in the identified shoreline.
4. Discussion
A coastline is an intersection between the midline of the water and the coast. The line that divides the coastline into marine charts is nearly a moderate line [
39]. Coastlines have fast-changing nature. Thus, proper definition of coastline change is important for identification of county boundary, navigation and shoreline matters. SAR imagery (e.g., RADARSAT-1 and RADARSAT-2) is a valuable dataset for detection and description of coastlines. In general, extraction and recognition of coastal features from SAR images involve a series of practices, including filtering, progression, image segmentation, shoreline extraction and change detection. In this study, a semiautomated process was created to monitor the shifts and extraction of the coastline of Kelantan, Malaysia, from RADARSAT. This proposed process is an advanced technique for radar images. A system of different segmentation analyses was applied to the filtered images to separate the land and ocean. After the segmentation result was obtained, assessment of changes was conducted using an SVM classifier to achieve improved classification result. The results revealed that SVM provided overall accuracies of 98.7% and 98.3% on images in 2003 and 2014, respectively. To substantiate the accuracy of SVM classifier, two other classifier methods, namely, k-nearest neighbours (k-NN) and decision tree (DT), were applied on both SAR imageries. The comparison results of classified maps with GCPs showed that SVM generally had the best performance among the three classifiers with the optimal parameter setting; the minimum overall accuracy of SVM was 98.34%, which was higher than the maximum overall accuracy of DT (94.2%) and k-NN (96.6%). The high-performance classifier was used in further processing to derive the final shoreline. The SVM classifier is less sensitive to sample sizes because SVM only uses the support vectors instead of all training samples to build the separating hyperplane. Thus, adding a large number of training samples would not considerably affect the classification accuracy, in which the increase in sample size does not necessarily lead to a considerable increase in classification accuracies. In this study, we tried to increase the number of training samples as much as possible. However, the result of classification was not enhanced when the number of training samples was 80. When training samples of 90 and 100 were tested for each class of land use in 2014, the classification accuracy dropped to 97.3% and 97.1%, respectively.
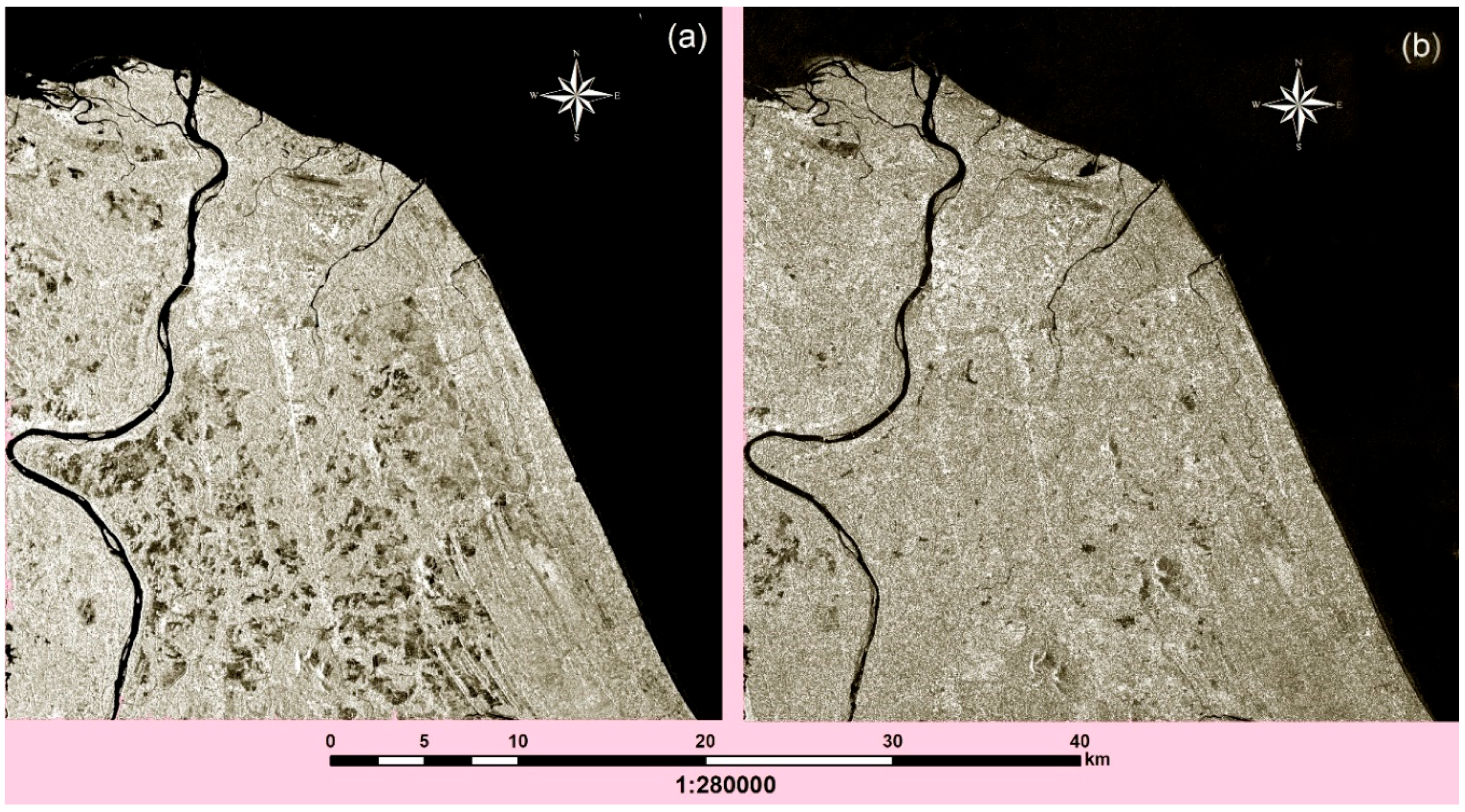
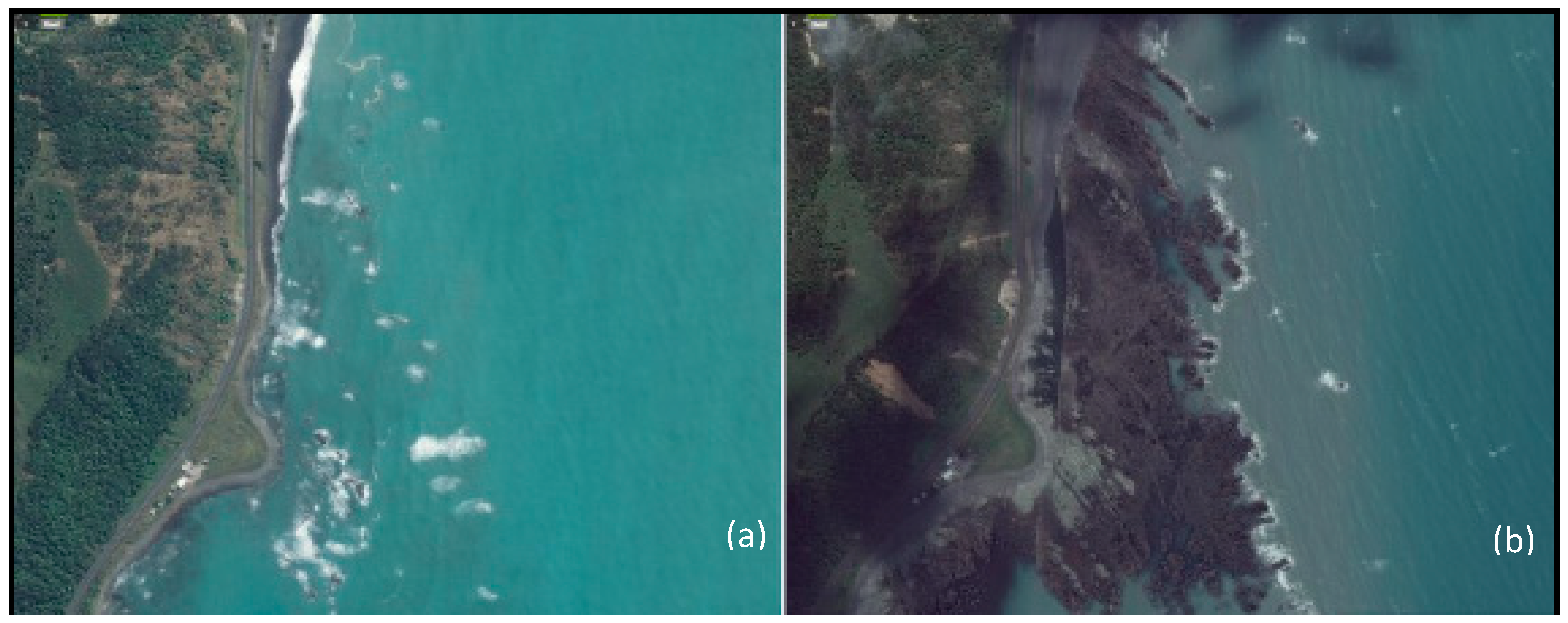
Distortions were shown in some locations, which may be attributed to the changes in the coastline over the years due to the impact of tsunami; these changes might have affected the shifted shoreline of Kelantan (
Figure 10). The 2004 Indian Ocean earthquake with the magnitude of 9.1 to 9.3 (Mw) caused the tsunami to collapse along the coast of Pahang and Kelantan, thereby shifting them from a few metres to many hundred metres inland [
40].
Wet sands on the beach are a source of uncertainty for SAR image classification. Thus, they must be considered in the process. Some sandy areas become wet due to tidal phenomena. This condition can cause the distortion on the backscatter coefficient for the spectral difference segmentation in separating land and ocean. Therefore, the date of image capturing should be synchronised on multitemporal images when similar tidal level occurs on the sandy beach. A previous study estimated that the coast is raised between 0.5 and 2 m from approximately 20 km in the south of Kaikoura [
41].
Shoreline changes are usually influenced by cross-shore sediment transport processes and human interferences. However, tsunamis and earthquakes considerably impact shoreline changes. In the validation analysis, the average differences between the SAR shoreline and the surveyed shoreline were 2.56 and 1.97 m for 2003 and 2014, respectively. A total of 32 randomly transects were measured to calculate the validation parts, although the remaining points along the shoreline borders were visually fitted on the intersection of one another in the two approaches. The visual interpretation showed that the major coastline shift had occurred in the northeast side of the coast between 2003 and 2014 during which the coastal movement was towards the ocean. The southeast part of the shoreline had also shifted slightly compared with the northeast part.
5. Conclusions
A semiautomatic methodology for detecting shorelines using single SAR images is a powerful method to extract coastlines for mapping purpose. Coastal surveying and detection are crucial for environmental protection and sustainable coastal zone management. This paper describes a simple and effective algorithm for detecting coastlines. An optimised technique for SAR image preprocessing, segmentation and classification was proposed to detect shoreline dynamics. After coastline detection, coastline extraction was achieved using a fast and reliable segmentation technique to delineate shoreline information. SAR imagery has a high capability to extract shorelines in tropical regions under cloud coverage. The results showed that the applied method had a high degree of accuracy based on the validation of the surveyed thematic map. Ideally speaking, for an accurate change detection result using multitemporal dataset, satellite images should be captured at the same date and time of the years, with similar atmospheric condition and tide level.
The change detection results showed an average difference in the shoreline by 12.5 m between 2003 and 2014. A comparison of the extracted shoreline with the coastline drawn by JUPEM and Digital Globe satellite image revealed general similarities in coastline curvature. Misrepresentations were also shown in some places, and they might be due to coastal changes over the years because of the effects of tsunami and earthquakes. The proposed methods and procedures can identify and map coastlines for updating the geographic charts and other maps required for accurate coastal mapping. Further works should use drone-based technologies and high-resolution satellite imagery for accurate coastline detection and monitoring. Comprehensive and detailed in situ tidal variation data and land use/land cover patterns should also be considered in future studies.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}