Remote Sensing and Cropping Practices: A Review

 , ,
, ,
Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
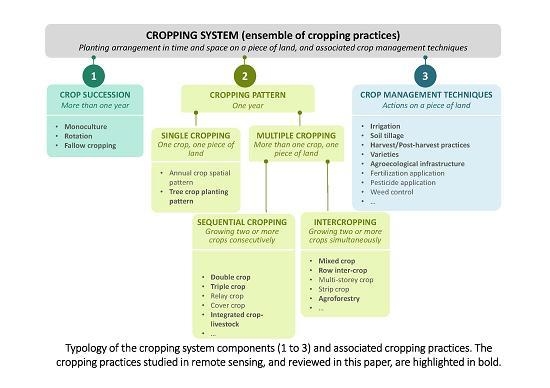
2. Typology of the Cropping Practices
3. Crop Succession
3.1. Monocropping and Crop Rotation
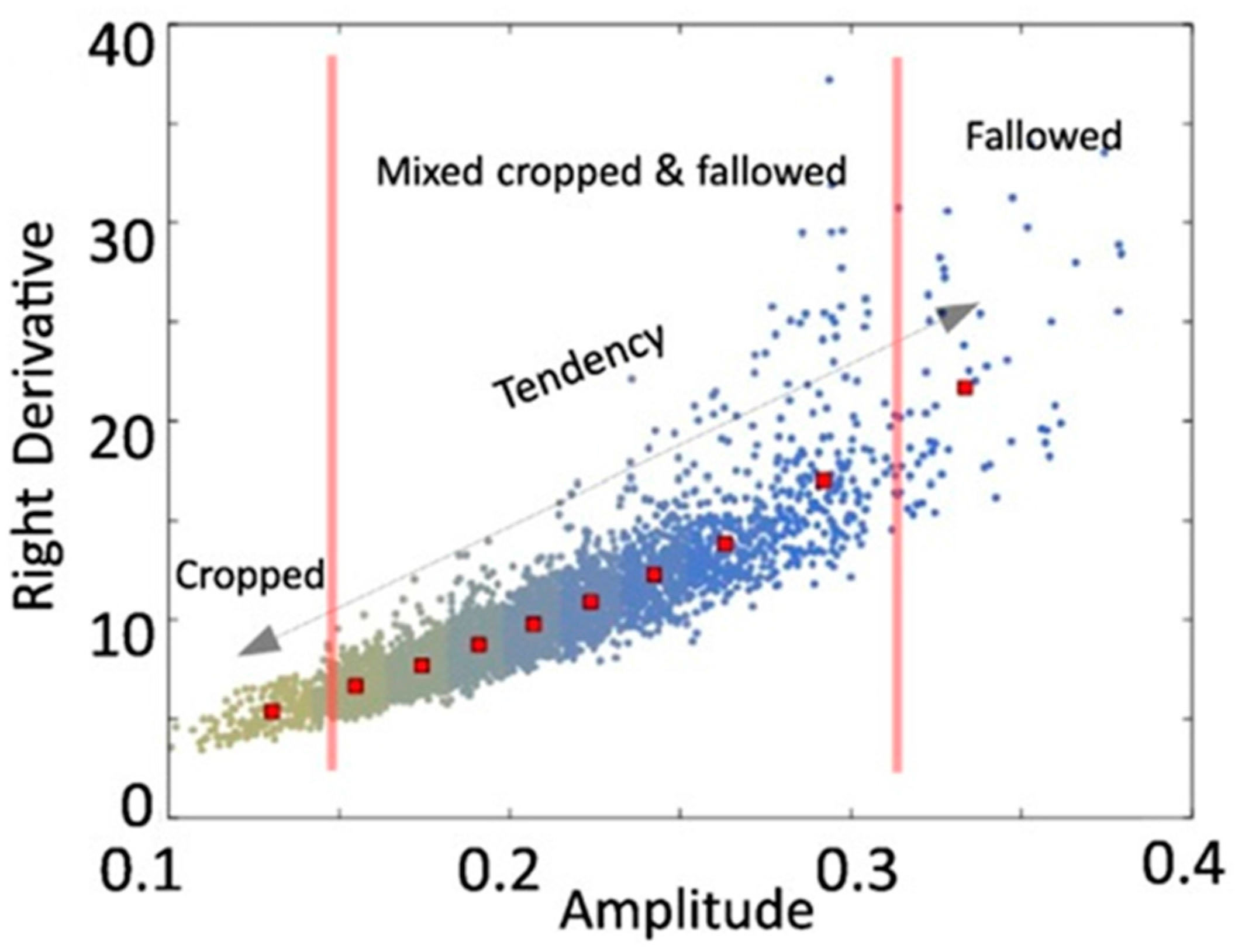
3.2. Crop-Fallow Rotation/Fallowing
4. Cropping Pattern
4.1. Single Cropping
Tree Crop Planting Pattern
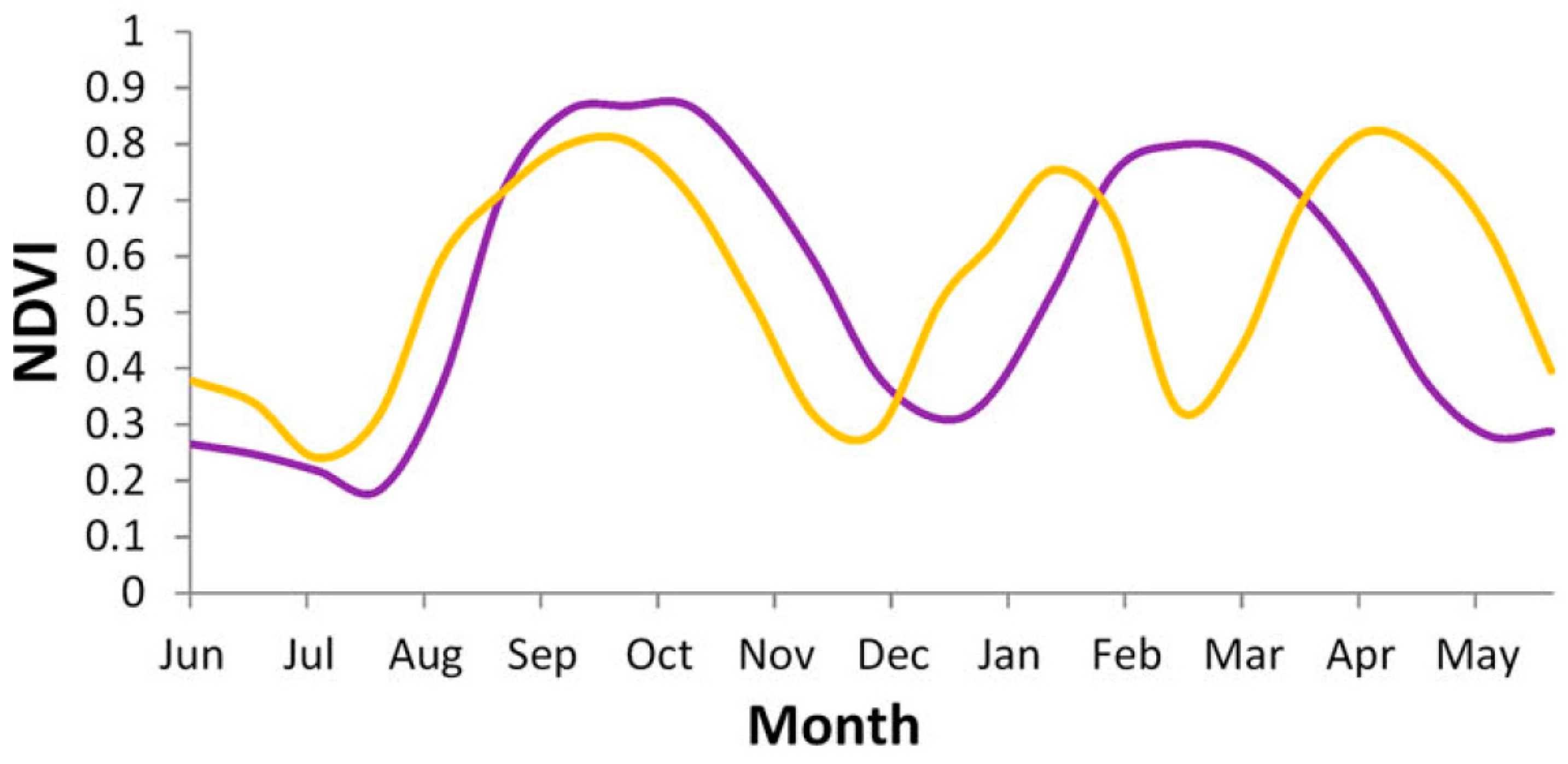
4.2. Multiple Cropping
4.2.1. Sequential Cropping
4.2.2. Intercropping/Agroforestry
5. Cropping Techniques
5.1. Irrigation
5.2. Soil Tillage
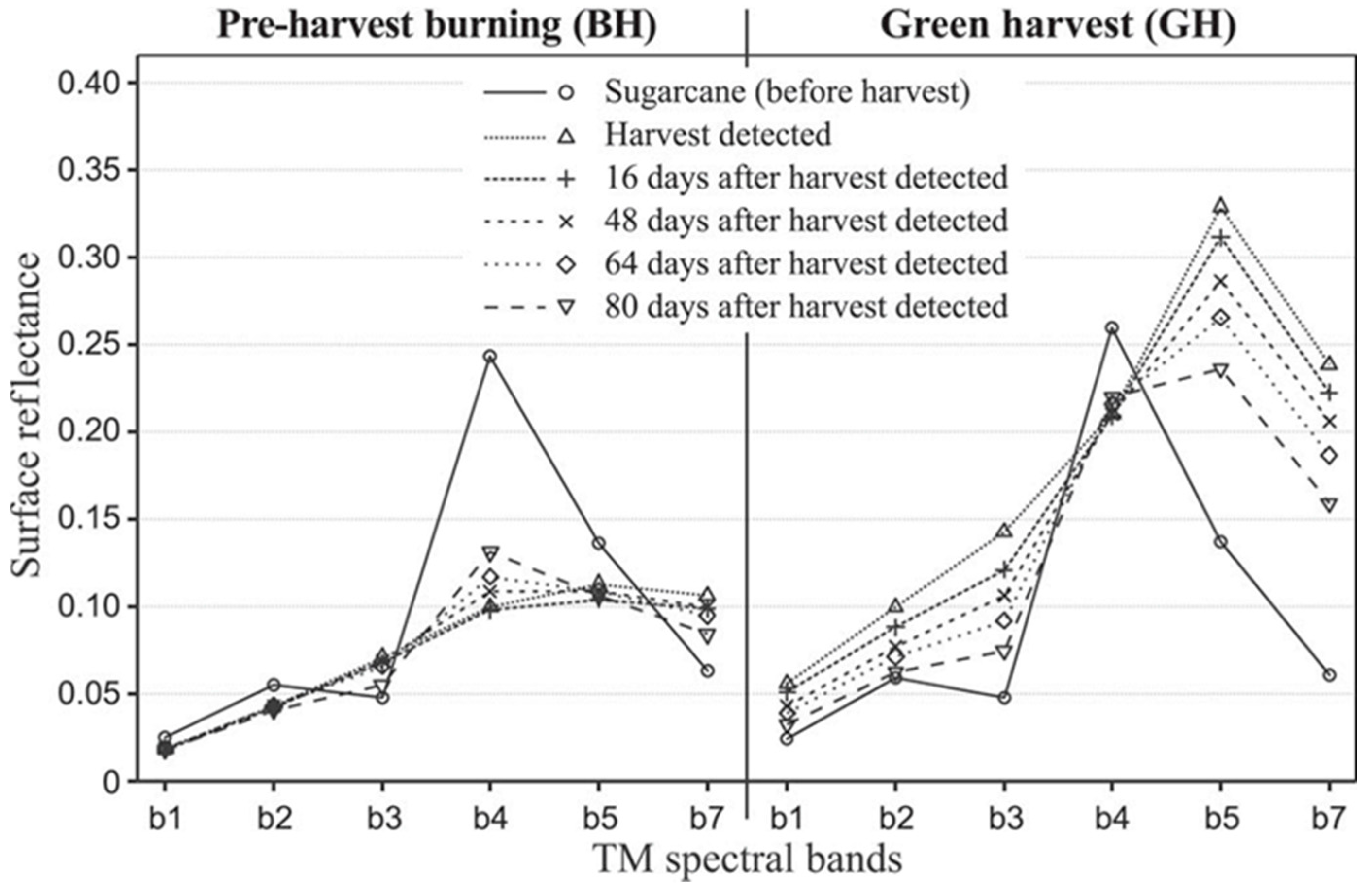
5.3. Harvest
5.3.1. Detection of Harvested Area
5.3.2. Harvest and Post-Harvest Practices
5.3.3. Grazing vs. Mowing
5.4. Crop Varieties
5.5. Agroecological Infrastructure
6. Discussion
6.1. General Patterns
6.2. Research Perspectives
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Polsot, A.-S.; Speedy, A.; Kueneman, E. Good Agricultural Practices—A Working Concept; Background Paper for the FAO Internal Workshop on Good Agricultural Practices; FAO: Rome, Italy, 2004; p. 41. [Google Scholar]
- Saeys, W.; De Baerdemaeker, J. Precision agriculture technology for sustainable good agricultural practice. In Proceedings of the 5th International Conference on Trends in Agriculture Engineering, Czech University of Life Sciences Faculty of Engineering, Prague, Czech Republic; 2013; pp. 19–24. [Google Scholar]
- Belward, A.S.; Skøien, J.O. Who launched what, when and why; trends in global land-cover observation capacity from civilian Earth observation satellites. ISPRS J. Photogramm. Remote Sens. 2015, 103, 115–128. [Google Scholar] [CrossRef]
- Bégué, A.; Arvor, D.; Lelong, C.; Vintrou, E.; Simoes, M. Agricultural systems studies using remote sensing. In Remote sensing Handbook. Vol. II: Land Resources: Monitoring, Modeling, and Mapping; Thenkabail, P.S., Ed.; CRC Press: Boca Raton, FL, USA; Taylor and Francis Group: London, UK; New York, NY, USA, 2015; pp. 113–130. [Google Scholar]
- Atzberger, C.; Vuolo, F.; Klisch, A.; Rembold, F.; Meroni, M.; Mello, M.P.; Formaggio, A. Agriculture. In Remote Sensing Handbook. Vol. II: Land Resources: Monitoring, Modeling, and Mapping; Thenkabail, P.S., Ed.; CRC Press: Boca Raton, FL, USA; Taylor and Francis Group: London, UK; New York, NY, USA, 2015; pp. 71–112. [Google Scholar]
- Gómez, C.; White, J.C.; Wulder, M.A. Optical remotely sensed time series data for land cover classification: A review. ISPRS J. Photogramm. Remote Sens. 2016, 116, 55–72. [Google Scholar] [CrossRef]
- Nafziger, E. Cropping systems. In Illinois Agronomy Handbook, 24th ed.; University of Illinois, College of Agriculture: Urbana-Champaign, IL, USA, 2009; p. 224. [Google Scholar]
- Wery, J.; Marrou, H.; Metay, A. Mémento d’agronomie Systémique; UMR System: Montpellier, France, 2016; p. 17. [Google Scholar]
- Dias, T.; Dukesa, A.; Antunesa, P.M. Accounting for soil biotic effects on soil health and crop productivity in the design of crop rotations. J. Sci. Food Agric. 2015, 95, 447–454. [Google Scholar] [CrossRef] [PubMed]
- Natural Resources Conservation Service (NRCS). Organic Production: Using NRCS Practice Standards to Support Organic Growers; Natural Resources Conservation Service: Washington, DC, USA, 2009.
- Stern, A.J.; Doraiswamy, P.C.; Hunt, E.R. Changes of crop rotation in Iowa determined from the United States Department of Agriculture, National Agricultural Statistics Service cropland data layer product. J. Appl. Remote Sens. 2012, 6, 063590. [Google Scholar] [CrossRef]
- Kussul, N.; Skakun, S.; Shelestov, A.; Lavreniuk, M.; Yailymov, B.; Kussul, O. Regional scale crop mapping using multi-temporal satellite imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-7/W3, 45–52. [Google Scholar] [CrossRef]
- Waldner, F.; De Abelleyra, D.; Verón, S.R.; Zhang, M.; Wu, B.; Plotnikov, D.; Bartalev, S.; Lavreniuk, M.; Skakun, S.; Kussul, N.; et al. Towards a set of agrosystem-specific cropland mapping methods to address the global cropland diversity. Int. J. Remote Sens. 2016, 37, 3196–3231. [Google Scholar] [CrossRef]
- Sahajpal, R.; Zhang, X.; Izaurralde, R.C.; Gelfand, I.; Hurtt, G.C. Identifying representative crop rotation patterns and grassland loss in the US Western corn belt. Comput. Electron. Agric. 2014, 108, 173–182. [Google Scholar] [CrossRef]
- Mueller-Warrant, G.W.; Sullivan, C.; Anderson, N.; Whittaker, G.W. Detecting and correcting logically inconsistent crop rotations and other land-use sequences. Int. J. Remote Sens. 2016, 37, 29–59. [Google Scholar]
- Siebert, S.; Portmann, F.T.; Döll, P. Global patterns of cropland use intensity. Remote Sens. 2010, 2, 1625–1643. [Google Scholar] [CrossRef]
- Gumma, M.K.; Thenkabail, P.S.; Teluguntla, P.; Rao, M.N.; Mohammed, I.A.; Whitbread, A.M. Mapping rice-fallow cropland areas for short-season grain legumes intensification in South Asia using MODIS 250 m time-series data. Int. J. Digit. Earth 2016, 9, 981–1003. [Google Scholar] [CrossRef]
- Melton, F.; Rosevelt, C.; Guzman, A.; Johnson, L.; Zaragoza, I.; Verdin, J.; Thenkabail, P.; Wallace, C.; Mueller, R.; Willis, P.; et al. Fallowed Area Mapping for Drought Impact Reporting: 2015 Assessment of Conditions in the California Central Valley; NASA AMES Research Center Cooperative for Research in Earth Science; USGS; USDA National Agricultural Statistics Service; California Department of Water Resources, 2015; p. 13. Available online: https://nex.nasa.gov/nex/static/media/other/Central_Valley_Fallowing_Data_Report_14Oct2015.pdf (accessed on 11 January 2018).
- Tong, X.; Brandt, M.; Hiernaux, P.; Herrmann, S.M.; Tiana, F.; Prishchepov, A.V.; Fensholt, R. Revisiting the coupling between NDVI trends and cropland changes in the Sahel drylands: A case study in Western Niger. Remote Sens. Environ. 2017, 191, 286–296. [Google Scholar] [CrossRef]
- Estel, S.; Kuemmerle, T.; Alcántara, C.; Levers, C.; Prishchepov, A.; Hostert, P. Mapping farmland abandonment and recultivation across Europe using MODIS NDVI time series. Remote Sens. Environ. 2015, 163, 312–325. [Google Scholar] [CrossRef]
- Xie, H.; Tian, Y.Q.; Granillo, J.A.; Keller, G.R. Suitable remote sensing method and data for mapping and measuring active crop fields. Int. J. Remote Sens. 2007, 28, 395–411. [Google Scholar] [CrossRef]
- Wallace, C.S.A.; Thenkabail, P.; Rodriguez, J.R.; Brown, M.K. Fallow-land Algorithm based on Neighborhood and Temporal Anomalies (FANTA) to map planted versus fallowed croplands using MODIS data to assist in drought studies leading to water and food security assessments. GISci. Remote Sens. 2017, 54, 258–282. [Google Scholar] [CrossRef]
- Sicre, C.M.; Baup, F.; Fieuzal, R. Determination of the crop row orientations from Formosat-2 multi-temporal and panchromatic images. ISPRS J. Photogramm. Remote Sens. 2014, 94, 127–142. [Google Scholar] [CrossRef]
- Dupraz, C.; Liagre, F.; Moreno, G.; Paris, P.; Papanastasis, V. Options for Agroforestry Policy in the European Union. Silvoarable Agroforestry for Europe (SAFE) Report, Deliverable 9.3. 2005, p. 34. Available online: http://www1.montpellier.inra.fr/safe/english/results/final-report/D9-3.pdf (accessed on 11 January 2018).
- Aksoy, S.; Yalniz, I.Z.; Tasdemir, K. Automatic detection and segmentation of orchards using very high resolution imagery. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3117–3131. [Google Scholar] [CrossRef]
- Baraldi, A.; Wassenaar, T.; Kay, S. Operational performance of an automatic preliminary specral rule-based decision tree classifier of spaceborne very high resolution optical images. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3482–3502. [Google Scholar] [CrossRef]
- Komba Mayossa, P.C.; Coppens D’Eeckenbrugge, G.; Borne, F.; Gadal, S.; Viennois, G. Developing a method to map coconut agrosystems from high-resolution satellite images. In Proceedings of the 27th International Cartographic Conference, Rio de Janeiro, Brésil, 23–28 August 2015; pp. 1–14. [Google Scholar]
- Lelong, C.; Thong-Chane, A. Application of textural analysis on very high resolution panchromatic images to map coffee orchards in Uganda. In Proceedings of the 2003 IEEE International Geosciences and Remote Sensing Symposium (IGARSS), Toulouse, France, 21–25 July 2003; pp. 1007–1009. [Google Scholar]
- Amoruso, N.; Baraldi, A.; Tarantino, C.; Blonda, P. Spectral rules and geostatic features for characterizing olive groves in Quickbird images. In Proceedings of the IEEE International Geosciences and Remote Sensing Symposium (IGARSS), Cape Town, South Africa, 13–17 July 2009; pp. 228–231. [Google Scholar]
- Trias-Sanz, R. Texture orientation and period estimator for discriminating between forest, orchards, vineyards, and tilled fields. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2755–2760. [Google Scholar] [CrossRef]
- Helmholz, P.; Rottensteiner, F. Automatic verification of agricultural areas using Ikonos satellite images. In Proceedings of the ISPRS Workshop High-Resolution Earth Imaging & Geospatial Information, Hannover, Germany, 2–5 June 2009. [Google Scholar]
- Mougel, B.; Lelong, C.; Nicolas, J.-M. Classification and Information Extraction in Very High Resolution Satellite Images for Tree Crops Monitoring; IOS Press: Istabul, Turkey, 2008. [Google Scholar]
- Rabatel, G.; Delenne, C.; Deshayes, M. A non-supervised approach using Gabor filters for vine-plot detection in aerial images. Comput. Electron. Agric. 2008, 62, 159–168. [Google Scholar] [CrossRef]
- Ranchin, T.; Naert, B.; Albuisson, M.; Boyer, G.; Arstrand, P. An automatic method for vine detection in airborne imagery using wavelet transform and multiresolution analysis. Photogramm. Eng. Remote Sens. 2001, 67, 91–98. [Google Scholar]
- Ursani, A.A.; Kpalma, K.; Lelong, C.; Ronsin, J. Fusion of textural and spectral information for tree crop and other agricultural cover mapping with very high resolution satellite images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 225–235. [Google Scholar] [CrossRef]
- Peña-Barragan, J.M.; Jurado-Exposito, M.; Lopez-Granados, F.; Atenciano, S.; Sanchez-de la Orden, M.; Garcia-Ferrer, A.; Garcia-Torres, L. Assessing land-use in olive groves from aerial photographs. Agric. Ecosyst. Environ. 2004, 103, 117–122. [Google Scholar] [CrossRef]
- Panda, S.S.; Hoogenboom, G.; Paz, J. Remote sensing and geospatial technological applications for site-specific management of fruit and nut crops: A review. Remote Sens. 2010, 2, 1973–1997. [Google Scholar] [CrossRef]
- Da Silva, P.R.; Ducati, J.R. Spectral features of vineyards in South Brazil from ASTER imaging. Int. J. Remote Sens. 2009, 30, 6085–6098. [Google Scholar] [CrossRef]
- Delenne, C.; Durrieu, S.; Rabatel, G.; Deshayes, M.; Bailly, J.-S.; Lelong, C.; Couteron, P. Textural approaches for vineyard detection and characterization using very high spatial resolutions remote sensing data. Int. J. Remote Sens. 2008, 29, 1153–1167. [Google Scholar] [CrossRef]
- Yalniz, I.Z.; Aksoy, S. Unsupervised detection and localization of structural textures using projection profiles. Pattern Recognit. 2010, 43, 3324–3337. [Google Scholar] [CrossRef]
- Lefebvre, A.; Corpetti, T.; Bonnardot, V.; Qué, H.; Hubert Moy, L. Vineyard identification and characterization based on texture analysis in the helderberg basin (South Africa). In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 July 2010. [Google Scholar]
- Véga, C.; Hamrouni, A.; El Mokhtari, S.; Morel, J.; Bock, J.; Renaud, J.-P.; Bouvier, M.; Durrieu, S. Ptrees: A point-based approach to forest tree extraction from LiDAR data. Int. J. Appl. Earth Obs. Geoinf. 2014, 33, 98–108. [Google Scholar] [CrossRef]
- Goodwin, N.; Coops, N.C.; Stone, C. Assessing plantation canopy condition from airborne imagery using spectral mixture analysis and fractionnal abundances. Int. J. Appl. Earth Obs. Geoinf. 2005, 7, 11–28. [Google Scholar] [CrossRef]
- Gougeon, F. Automatic individual tree crown delineation using a valley-following algorithm and a rule-based system. In Proceedings of the International Forum on Automated Interpretation of High Spatial Resolution Digital Imagery for Forestry, Victoria, BC, Canada, 10–12 February 1998; pp. 11–23. [Google Scholar]
- Nelson, T.; Boots, B.; Wulder, M.A. Techniques for accuracy assessment of tree locations extracted from remotely sensed imagery. J. Environ. Manag. 2005, 74, 265–271. [Google Scholar] [CrossRef] [PubMed]
- Wulder, M.A.; Niemann, K.O.; Goodenough, D.G. Local maximum filtering for the extraction of tree locations and basal area from high spatial resolution imagery. Remote Sens. Environ. 2000, 73, 103–114. [Google Scholar] [CrossRef]
- Torres, L.G.; Pena-Barragan, J.M.; Lopez-Granados, F.; Jurado-Exposito, M.; Fernandez-Escobar, R. Automatic assessment of agro-environmental indicators from remotely sensed images of tree orchards and its evaluation using olive plantations. Comput. Electron. Agric. 2008, 61, 179–191. [Google Scholar] [CrossRef]
- Nevalainen, O.; Honkavaara, E.; Tuominen, S.; Viljanen, N.; Hakala, T.; Yu, X.; Hyyppä, J.; Saari, H.; Pölönen, I.; Imai, N.; et al. Individual tree detection and classification with UAV-based photogrammetric point clouds and hyperspectral imaging. Remote Sens. 2017, 9, 185. [Google Scholar] [CrossRef]
- Mingwei, Z.; Qingbo, Z.; Zhongxin, C.; Jia, L.; Yong, Z.; Chongfa, C. Crop discrimination in Northern China with double cropping systems using fourier analysis of time-series MODIS data. Int. J. Appl. Earth Obs. Geoinf. 2008, 10, 476–485. [Google Scholar] [CrossRef]
- Landers, J. How and why the Brazilian zero tillage explosion occurred. In Proceedings of the 10th International Soil Conservation Organization Meeting, Purdue University and USDA-ARS National Soil Erosion Research Laboratory, West Lafayette, IN, USA, 24–29 May 1999; pp. 29–39. [Google Scholar]
- Scopel, E.; Douzet, J.-M.; Macena Da Silva, F.A.; Cardoso, A.; Alves Moreira, J.A.; Findeling, A.; Bernoux, M. Impacts des systèmes de culture en semis direct avec couverture végétale (SCV) sur la dynamique de l’eau, de l’azote minéral et du carbone du sol dans les cerrados brésiliens. Cah. Agric. 2005, 14, 71–75. [Google Scholar]
- Arvor, D.; Meirelles, M.; Dubreuil, V.; Bégué, A.; Shimabukuro, Y.E. Analyzing the agricultural transition in Mato Grosso, Brazil, using satellite-derived indices. Appl. Geogr. 2012, 32, 702–713. [Google Scholar] [CrossRef]
- Macedo, M.N.; DeFries, R.S.; Morton, D.C.; Stickler, C.M.; Galford, G.L.; Shimabukuro, Y.E. Decoupling of deforestation and soy production in the Southern Amazon during the late 2000s. Proc. Natl. Acad. Sci. USA 2012, 109, 1341–1346. [Google Scholar] [CrossRef] [PubMed]
- Spera, S. Agricultural intensification can preserve the Brazilian Cerrado: Applying lessons from Mato Grosso and Goiás to Brazil’s last agricultural frontier. Trop. Conserv. Sci. 2017, 10, 1–7. [Google Scholar] [CrossRef]
- Wardlow, B.; Egbert, S.; Kastens, J. Analysis of time-series MODIS 250 m vegetation index data for crop classification in the U.S. Central great plains. Remote Sens. Environ. 2007, 108, 290–310. [Google Scholar] [CrossRef]
- Canisius, F.; Turral, H.; Molden, D. Fourier analysis of historical NOAA time series data to estimate bimodal agriculture. Int. J. Remote Sens. 2007, 28, 5503–5522. [Google Scholar] [CrossRef]
- Dubreuil, V.; Arvor, D.; Debortoli, N. Monitoring the pioneer frontier and agricultural intensification in Mato Grosso using SPOT VEGETATION images. Rev. Fr. Photogramm. Télédétec. 2012, 200, 2–10. [Google Scholar]
- Nguyen, T.T.H.; De Bie, C.A.J.M.; Ali, A.; Smaling, E.M.A.; Chu, T.H. Mapping the irrigated rice cropping patterns of the Mekong delta, Vietnam, through hyper-temporal SPOT NDVI image analysis. Int. J. Remote Sens. 2012, 33, 415–434. [Google Scholar] [CrossRef]
- Wardlow, B.D.; Egbert, S.L. Large-area crop mapping using time-series MODIS 250m NDVI data: An assessment for the U.S. Central great plains. Remote Sens. Environ. 2008, 112, 1096–1116. [Google Scholar] [CrossRef]
- Qiu, B.; Zhong, M.; Tang, Z.; Wang, C. A new methodology to map double-cropping croplands based on continuous wavelet transform. Int. J. Appl. Earth Obs. Geoinf. 2014, 26, 97–104. [Google Scholar] [CrossRef]
- Brown, J.; Jepson, W.; Kastens, J.; Wardlow, B.; Lomas, J.; Price, K. Multitemporal, moderate-spatial-resolution remote sensing of modern agricultural production and land modification in the Brazilian Amazon. GISci. Remote Sens. 2007, 44, 117–148. [Google Scholar] [CrossRef]
- Galford, G.L.; Mustard, J.F.; Melillo, J.; Gendrin, A.; Cerri, C.C.; Cerri, C.E.P. Wavelet analysis of MODIS time series to detect expansion and intensification of row-crop agriculture in Brazil. Remote Sens. Environ. 2008, 112, 576–587. [Google Scholar] [CrossRef]
- Arvor, D.; Jonathan, M.; Meirelles, M.S.P.; Dubreuil, V.; Durieux, L. Classification of MODIS EVI time series for crop mapping in the state of Mato Grosso, Brazil. Int. J. Remote Sens. 2011, 32, 7847–7871. [Google Scholar] [CrossRef]
- Brown, J.C.; Kastens, J.H.; Coutinho, A.C.; de Castro Victoria, D.; Bishop, C.R. Classifying multiyear agricultural land use data from Mato Grosso using time-series MODIS vegetation index data. Remote Sens. Environ. 2013, 130, 39–50. [Google Scholar] [CrossRef]
- Kastens, J.H.; Brown, J.C.; Coutinho, A.C.; Bishop, C.R.; Esquerdo, J.C.D.M. Soy moratorium impacts on soybean and deforestation dynamics in Mato Grosso, Brazil. PLoS ONE 2017, 12, e0176168. [Google Scholar] [CrossRef] [PubMed]
- Shao, Y.; Lunetta, R.S.; Wheeler, B.; Iiames, J.S.; Campbell, J.B. An evaluation of time-series smoothing algorithms for land-cover classifications using MODIS-NDVI multi-temporal data. Remote Sens. Environ. 2016, 174, 258–265. [Google Scholar] [CrossRef]
- Cheema, M.J.M.; Bastiaanssen, W.G.M. Land use and land cover classification in the irrigated Indus basin using growth phenology information from satellite data to support water management analysis. Agric. Water Manag. 2010, 97, 1541–1552. [Google Scholar] [CrossRef]
- Morton, D.C.; DeFries, R.S.; Shimabukuro, Y.E.; Anderson, L.O.; Arai, E.; del Bon Espirito-Santo, F.; Freitas, R.; Morisette, J. Cropland expansion changes deforestation dynamics in the southern Brazilian Amazon. Proc. Natl. Acad. Sci. USA 2006, 103, 14637–14641. [Google Scholar] [CrossRef] [PubMed]
- Maus, V.; Camara, G.; Cartaxo, R.; Sanchez, A.; Ramos, F.M.; de Queiroz, G.R. A time-weighted dynamic time warping method for land-use and land-cover mapping. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3729–3739. [Google Scholar] [CrossRef]
- Bailly, A.; Arvor, D.; Chapel, L.; Tavenard, R. Classification of MODIS time series with dense bag-of-temporal-SIFT-words: Application to cropland mapping in the Brazilian Amazon. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 2300–2303. [Google Scholar]
- Bouvet, A.; Le Toan, T.; Lam-Dao, N. Monitoring of the rice cropping system in the Mekong delta using ENVISAT/ASAR dual polarization data. IEEE Trans. Geosci. Remote Sens. 2009, 47, 517–526. [Google Scholar] [CrossRef]
- Nguyen, D.B.; Clauss, K.; Cao, S.; Naeimi, V.; Kuenzer, C.; Wagner, W. Mapping rice seasonality in the Mekong delta with multi-year envisat ASAR WSM data. Remote Sens. 2015, 7, 15868–15893. [Google Scholar] [CrossRef]
- FAO. Agroforestry. Available online: http://www.Fao.Org/forestry/agroforestry (accessed on 25 September 2017).
- Center, W.A. Transforming Lives and Landscapes with Trees. Available online: http://www.worldagroforestry.org/ (accessed on 25 September 2017).
- Nair, P.K.R. Agroforestry for sustainability of lower-input land-use systems. J. Crop Improv. 2007, 19, 25–47. [Google Scholar] [CrossRef]
- Nair, V.D.; Graetz, D.A. Agroforestry as an approach to minimizing nutrient loss from heavily fertilized soils: The Florida experience. Agrofor. Syst. 2004, 61, 269–279. [Google Scholar]
- Sachs, J.D. The End of Poverty: Economic Possibiliies for Our Time; Penguin Books: New York, NY, USA, 2005; p. 320. [Google Scholar]
- Atangana, A.; Khasa, D.; Chang, S.; Degrande, A. Agroforestry for soil conservation. In Tropical Agroforestry; Springer: Dordrecht, The Netherlands, 2014; pp. 203–216. [Google Scholar]
- Young, A. Agroforestry for Soil Conservation; CABI: Wallingford, UK, 1997; p. 276. [Google Scholar]
- Jose, S.; Gillespie, A.R.; Pallardy, S.G. Interspecific interactions in temperate agroforestry. Agrofor. Syst. 2004, 61, 237–255. [Google Scholar]
- Schultz, R.C.; Isenhart, T.M.; Simpkins, W.W.; Colletti, J.P. Riparian forest buffers in agroecosystems—Lessons learned from the bear creek watershed, Central Iowa, USA. Agrofor. Syst. 2004, 61, 35–50. [Google Scholar]
- Atangana, A.; Khasa, D.; Chang, S.; Degrande, A. Carbon sequestration in agroforestry systems. In Tropical Agroforestry; Springer: Dordrecht, The Netherlands, 2014; pp. 217–225. [Google Scholar]
- Nair, P.K.R.; Nair, V.D.; Kumar, B.M.; Showalter, J.M. Carbon sequestration in agroforestry systems. Adv. Agron. 2010, 108, 237–307. [Google Scholar]
- Ekadinata, A.; Widayati, A.; Vincent, G. Rubber agroforest identification using object-based classification in bungo district, jambi, indonesia. In Proceedings of the 25th Asian conference on Remote Sensing (ACRS), Chiang Mai, Thailand, 22–26 November 2004; pp. 551–556. [Google Scholar]
- Zomer, R.J.; Bossio, D.A.; Trabucco, A.; Yuanjie, L.; Gupta, D.C.; Singh, V.P. Trees and Water: Smallholder Agroforestry on Irrigated Lands in Northern India; International Water Management Institute (IWMI): Colombo, Sri Lanka, 2007; p. 50. [Google Scholar]
- Lelong, C.; Lesponne, C.; Lamanda, N.; Lainé, G.; Malézieux, E. Understanding the spatial structure of agroforestry systems using very high resolution remote sensing: An application to cotonut-based systems in Melanesia. In Proceedings of the 1st World Congress of Agroforestry, Orlando, FL, USA, 27 June–2 July 2004; p. 1. [Google Scholar]
- Lelong, C.; Dupuy, S.; Alexandre, C. Discrimination of tropical agroforestry systems in very high resolution satellite imagery using object-based hierarchical classification: A case-study on cocoa in Cameroon. South-East. Eur. J. Earth Obs. Geom. 2014, 3, 255–258. [Google Scholar]
- Karlson, M.; Ostwald, M.; Reese, H.; Bazié, H.R.; Tankoano, B. Assessing the potential of multi-seasonal Worldview-2 imagery for mapping west african agroforestry tree species. Int. J. Appl. Earth Obs. Geoinf. 2016, 50, 80–88. [Google Scholar] [CrossRef]
- Gomez, C.; Mangeas, M.; Petit, M.; Corbane, C.; Hamon, P.; Hamon, S.; De Kochko, A.; Le Pierres, D.; Poncet, V.; Despinoy, M. Use of high-resolution satellite imagery in an integrated model to predict the distribution of shade coffee tree hybrid zones. Remote Sens. Environ. 2010, 114, 2731–2744. [Google Scholar] [CrossRef]
- Hively, W.D.; Duiker, S.; McCarty, G.; Prabhakara, K. Remote sensing to monitor cover crop adoption in Southeastern Pennsylvania. Int. Soil Water Conserv. 2015, 70, 340–352. [Google Scholar] [CrossRef]
- Tuya, H.; Chen, Z.X. Mapping plastic-mulched farmland with multi-temporal Landsat-8 data. Remote Sens. 2017, 9, 557. [Google Scholar]
- Ozdogan, M.; Yang, Y.; Allez, G.; Cervantes, C. Remote sensing of irrigated agriculture: Opportunities and challenges. Remote Sens. 2010, 2, 2274. [Google Scholar] [CrossRef]
- Bastiaanssen, W.; Allen, R.; Droogers, P.; D’urso, G.; Steduto, P. Twenty-five years modeling irrigated and drained soils: State of the art. Agric. Water Manag. 2007, 92, 111–125. [Google Scholar] [CrossRef]
- Mekonnen, M.M.; Hoekstra, A.Y. Four billion people facing severe water scarcity. Sci. Adv. 2016, 2, e1500323. [Google Scholar] [CrossRef] [PubMed]
- Lobell, D.B.; Burke, M.B.; Tebaldi, C.; Mastrandrea, M.D.; Falcon, W.P.; Naylor, R.L. Prioritizing climate change adaptation needs for food security in 2030. Science 2008, 319, 607–610. [Google Scholar] [CrossRef] [PubMed]
- Teluguntla, P.; Thenkabail, P.S.; Xiong, J.; Gumma, M.K.; Congalton, R.G.; Oliphant, A.; Poehnelt, J.; Yadav, K.; Rao, M.; Massey, R. Spectral matching techniques (SMTS) and automated cropland classification algorithms (ACCAS) for mapping croplands of Australia using MODIS 250-m time-series (2000–2015) data. Int. J. Digit. Earth 2017, 10, 944–977. [Google Scholar] [CrossRef]
- Bastiaanssen, W.G.M.; Molden, D.J.; Makin, I.W. Remote sensing for irrigated agriculture: Examples from research and possible applications. Agric. Water Manag. 2000, 46, 137–155. [Google Scholar] [CrossRef]
- Draeger, W.C. Monitoring Irrigated Land Acreage Using Landsat Imagery: An Application Example; USGS Report; U.S. Geological Survey: Reston, VA, USA, 1976; pp. 76–630.
- Heller, R.C.; Johnson, K.A. Estimating irrigated land acreage from Landsat imagery [aerial photography]. Photogramm. Eng. Remote Sens. 1979, 45, 1379–1386. [Google Scholar]
- Carlson, M.P. The nebraska center-pivot inventory: An example of operational satellite remote sensing on a long-term basis. Photogramm. Eng. Remote Sens. 1989, 55, 587–590. [Google Scholar]
- Eckhardt, D.; Verdin, J.; Lyford, G. Automated update of an irrigated lands GIS using SPOT HRV imagery. Photogramm. Eng. Remote Sens. 1990, 56, 1515–1522. [Google Scholar]
- Abou El-Magd, I.; Tanton, T.W. Improvements in land use mapping for irrigated agriculture from satellite sensor data using a multi-stage maximum likelihood classification. Int. J. Remote Sens. 2003, 24, 4197–4206. [Google Scholar] [CrossRef]
- Simonneaux, V.; Duchemin, B.; Helson, D.; Er-Raki, S.; Olioso, A.; Chehbouni, A. The use of high-resolution image time series for crop classification and evapotranspiration estimate over an irrigated area in Central Morocco. Int. J. Remote Sens. 2008, 29, 95–116. [Google Scholar] [CrossRef]
- Lebourgeois, V.; Dupuy, S.; Vintrou, E.; Ameline, M.; Butler, S.; Bégué, A. A combined random forest and OBIA classification scheme for mapping smallholder agriculture at different nomenclature levels using multisource data (simulated Sentinel-2 time series, VHRS and DEM). Remote Sens. 2017, 9, 259. [Google Scholar] [CrossRef]
- Löw, F.; Schorcht, G.; Michel, U.; Dech, S.; Conrad, C. Per-field crop classification in irrigated agricultural regions in Middle Asia using random forest and support vector machine ensemble. In Proceedings of the SPIE Remote Sensing International Society for Optics and Photonics, Edinburgh, UK, 24–27 September 2012; p. 85380R. [Google Scholar]
- Li, R.; Pun, M.; Mutiibwa, D. Classification of irrigated and non-irrigated cropland using object-based image analysis: A case study in South-central Nebraska. In Proceedings of the 5th International Conference on Agro-Geoinformatics, Tianjin, China, 18–20 July 2016. [Google Scholar]
- Akbari, M.; Mamanpoush, A.R.; Gieske, A.; Miranzadeh, M.; Torabi, M.; Salemi, H. Crop and land cover classification in Iran using Landsat 7 imagery. Int. J. Remote Sens. 2006, 27, 4117–4135. [Google Scholar] [CrossRef]
- Choudhury, I.; Chakraborty, M.; Santra, S.C.; Parihar, J.S. Methodology to classify rice cultural types based on water regimes using multi-temporal Radarsat-1 data. Int. J. Remote Sens. 2012, 33, 4135–4160. [Google Scholar] [CrossRef]
- Alexandridis, T.K.; Zalidis, G.C.; Silleos, N.G. Mapping irrigated area in Mediterranean basins using low cost satellite earth observation. Comput. Electron. Agric. 2008, 64, 93–103. [Google Scholar] [CrossRef]
- Biggs, T.W.; Thenkabail, P.; Gumma, M.K.; Scott, C.; Parthasaradhi, G.; Turral, H. Irrigated area mapping in heterogeneous landscapes with MODIS time series, ground truth and census data, Krishna basin, India. Int. J. Remote Sens. 2006, 27, 4245–4266. [Google Scholar] [CrossRef]
- Dheeravath, V.; Thenkabail, P.; Chandrakantha, G.; Noojipady, P.; Reddy, G.; Biradar, C.M.; Gumma, M.K.; Velpuri, M. Irrigated areas of India derived using MODIS 500 m time series for the years 2001–2003. ISPRS J. Photogramm. Remote Sens. 2010, 65, 42–59. [Google Scholar] [CrossRef]
- Toomanian, N.; Gieske, A.; Akbary, M. Irrigated area determination by NOAA-Landsat upscaling techniques, Zayandeh river basin, Isfahan, Iran. Int. J. Remote Sens. 2004, 25, 4945–4960. [Google Scholar] [CrossRef]
- Xiao, X.; Boles, S.; Liu, J.; Zhuang, D.; Frolking, S.; Li, C.; Salas, W.; Moore, B. Mapping paddy rice agriculture in Southern China using multi-temporal MODIS images. Remote Sens. Environ. 2005, 95, 480–492. [Google Scholar] [CrossRef]
- Gumma, M.K.; Thenkabail, P.S.; Hideto, F.; Nelson, A.; Dheeravath, V.; Busia, D.; Rala, A. Mapping irrigated areas of Ghana using fusion of 30 m and 250 m resolution remote-sensing data. Remote Sens. 2011, 3, 816–835. [Google Scholar] [CrossRef]
- Kamthonkiat, D.; Honda, K.; Turral, H.; Tripathi, N.; Wuwongse, V. Discrimination of irrigated and rainfed rice in a tropical agricultural system using SPOT VEGETATION NDVI and rainfall data. Int. J. Remote Sens. 2005, 26, 2527–2547. [Google Scholar] [CrossRef]
- Thenkabail, P.S.; Schull, M.; Turral, H. Ganges and Indus river basin land use/land cover (LULC) and irrigated area mapping using continuous streams of MODIS data. Remote Sens. Environ. 2005, 95, 317–341. [Google Scholar] [CrossRef]
- Loveland, T.R.; Reed, B.C.; Brown, J.F.; Ohlen, D.O.; Zhu, Z.; Yang, L.; Merchant, J.W. Development of a global land cover characteristics database and IGBP discover from 1 km AVHRR data. Int. J. Remote Sens. 2000, 21, 1303–1330. [Google Scholar] [CrossRef]
- Arino, O.; Gross, D.; Ranera, F.; Leroy, M.; Bicheron, P.; Brockman, C.; Defourny, P.; Vancutsem, C.; Achard, F.; Durieux, L. GlobCover: ESA service for global land cover from MERIS. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Barcelona, Spain, 23–28 July 2007; pp. 2412–2415. [Google Scholar]
- Thenkabail, P.; GangadharaRao, P.; Biggs, T.; Krishna, M.; Turral, H. Spectral matching techniques to determine historical land-use/land-cover (LULC) and irrigated areas using time-series 0.1-degree AVHRR pathfinder datasets. Photogramm. Eng. Remote Sens. 2007, 73, 1029–1040. [Google Scholar]
- Thenkabail, P.S.; Biradar, C.M.; Noojipady, P.; Dheeravath, V.; Li, Y.; Velpuri, M.; Gumma, M.; Gangalakunta, O.R.P.; Turral, H.; Cai, X. Global irrigated area map (GIAM), derived from remote sensing, for the end of the last millennium. Int. J. Remote Sens. 2009, 30, 3679–3733. [Google Scholar] [CrossRef]
- Velpuri, N.; Thenkabail, P.; Gumma, M.K.; Biradar, C.; Dheeravath, V.; Noojipady, P.; Yuanjie, L. Influence of resolution in irrigated area mapping and area estimation. Photogramm. Eng. Remote Sens. 2009, 75, 1383–1395. [Google Scholar] [CrossRef]
- Kladivko, E.J. Tillage systems and soil ecology. Soil Tillage Res. 2001, 61, 61–76. [Google Scholar] [CrossRef]
- Aber, J.D.; Melillo, M.M. Terrestrial Ecosystems; Brooks Cole: San Diego, CA, USA, 2001. [Google Scholar]
- Steinbach, H.S.; Álvarez, R. Changes in soil organic carbon contents and nitrous oxide emissions after introduction of no-till in Pampean agroecosystems. J. Environ. Qual. 2005, 35, 3–13. [Google Scholar] [CrossRef] [PubMed]
- Conservation Technology Information Center (CTIC). National Survey of Conservation Tillage Practices; Conservation Technology Information Center: West Lafayette, IN, USA, 1990. [Google Scholar]
- Zheng, B.; Campbell, J.B.; Serbin, G.; Galbraith, J.M. Remote sensing of crop residue and tillage practices: Present capabilities and future prospects. Soil Tillage Res. 2014, 138, 26–34. [Google Scholar] [CrossRef]
- Elvidge, C.D. Visible and Near Infrared reflectance characteristics of dry plant materials. Int. J. Remote Sens. 1990, 11, 1775–1795. [Google Scholar] [CrossRef]
- South, S.; Qi, J.; Lusch, D.P. Optimal classification methods for mapping agricultural tillage practices. Remote Sens. Environ. 2004, 91, 90–97. [Google Scholar] [CrossRef]
- Sudheer, K.P.; Gowda, P.; Chaubey, I.; Howell, T. Artificial neural network approach for mapping contrasting tillage practices. Remote Sens. 2010, 2, 579–590. [Google Scholar] [CrossRef]
- Bricklemyer, R.S.; Lawrence, R.L.; Miller, P.R.; Battogtokh, N. Predicting tillage practices and agricultural soil disturbance in North Central Montana with Landsat imagery. Agric. Ecosyst. Environ. 2006, 114, 210–216. [Google Scholar] [CrossRef]
- Watts, J.D.; Powell, S.L.; Lawrence, R.L.; Hilker, T. Improved classification of conservation tillage adoption using high temporal and synthetic satellite imagery. Remote Sens. Environ. 2011, 115, 66–75. [Google Scholar] [CrossRef]
- Daughtry, C.S.T.; Hunt, E.R., Jr.; Doraiswamy, P.C.; McMurtrey, J.E., III. Remote sensing the spatial distribution of crop residues. Agron. J. 2005, 97, 864–871. [Google Scholar] [CrossRef]
- Van Deventer, A.P.; Ward, A.D.; Gowda, P.H.; Lyon, J.G. Using Thematic Mapper data to identify contrasting soil plains and tillage practices. Photogramm. Eng. Remote Sens. 1997, 63, 87–93. [Google Scholar]
- Serbin, G.; Hunt, E.R., Jr.; Daughtry, C.S.T.; McCarty, G.W.; Doraiswamy, P.C. An improved ASTER index for remote sensing of crop residue. Remote Sens. 2009, 1, 971–991. [Google Scholar] [CrossRef]
- Biard, F.; Baret, F. Crop residue estimation using multiband reflectance. Remote Sens. Environ. 1997, 59, 530–536. [Google Scholar] [CrossRef]
- Bannari, A.; Staenz, K.; Champagne, C.; Khurshid, K.S. Spatial variability mapping of crop residue using Hyperion (EO-1) hyperspectral data. Remote Sens. 2015, 7, 8107–8127. [Google Scholar] [CrossRef]
- Zhang, M.; Wu, B.; Meng, J.; Li, Q.; Dong, T. Evaluation of spectral angle index from Landsat TM image for crop residue cover estimation. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012; pp. 5073–5076. [Google Scholar]
- Galloza, M.S.; Crawford, M. Exploiting multisensor spectral data to improve crop residue cover estimates for management of agricultural water quality. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Vancouver, BC, Canada, 24–29 July 2011; pp. 3668–3671. [Google Scholar]
- Pacheco, A.; McNairn, H. Evaluating multispectral remote sensing and spectral unmixing analysis for crop residue mapping. Remote Sens. Environ. 2010, 114, 2219–2228. [Google Scholar] [CrossRef]
- Jackson, T.J.; McNairn, H.; Weltz, M.A.; Brisco, B.; Brown, R. First order surface roughness correction of active microwave observations for estimating soil moisture. IEEE Trans. Geosci. Remote Sens. 1997, 35, 1065–1069. [Google Scholar] [CrossRef]
- Marzahn, P.; Ludwig, R. On the derivation of soil surface roughness from multi-parametric PolSAR data and its potential for hydrological modeling. Hydrol. Earth Syst. Sci. 2009, 13, 381–394. [Google Scholar] [CrossRef]
- Mattia, F.; Le Toan, T.; Souyris, J.C.; De Carolis, G.; Floury, N.; Posa, F.; Pasquariello, G. The effect of surface roughness on multifrequency polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 1997, 35, 915–926. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Dubois, P.C.; Van Zyl, J. Radar mapping of surface soil moisture. J. Hydrol. 1996, 184, 57–84. [Google Scholar] [CrossRef]
- Pacheco, A.; McNairn, H.; Merzouki, A. Evaluating TerraSAR-X for the identification of tillage occurance over an agricultural area in Canada. In Proceedings of the International Society for Optical Engineering and Remote Sensing for Agriculture, Ecosystems, and Hydrology XII, Toulouse, France, 20–22 September 2010. [Google Scholar]
- Mc Nairn, H.; Boisvert, J.B.; Major, D.J.; Gwyn, Q.H.J.; Brown, R.J.; Smith, A.M. Identification of agricultural tillage practices from C band radar backscatter. Can. J. Remote Sens. 1996, 22, 154–162. [Google Scholar] [CrossRef]
- McNairn, H.; Wood, D.; Gwyn, Q.H.J.; Brown, R.I.; Charbonneau, F. Mapping tillage and crop residue. Management practices with RADARSAT. Can. J. Remote Sens. 1998, 24, 28–35. [Google Scholar] [CrossRef]
- Hadria, R.; Duchemin, B.; Baup, F.; Le Toan, T.; Bouvet, A.; Dedieu, G.; Le Page, M. Combined use of optical and radar satellite data for the detection of tillage and irrigation operations: Case study in Central Morocco. Agric. Water Manag. 2009, 96, 1120–1127. [Google Scholar] [CrossRef]
- Turner, R.; Panciera, R.; Tanase, M.A.; Lowell, K.; Hacker, J.M.; Walker, J.P. Estimation of soil surface roughness of agricultural soils using airborne LiDAR. Remote Sens. Environ. 2014, 140, 107–117. [Google Scholar] [CrossRef]
- Gao, F.; Masek, J.; Schwaller, M.; Hall, F. On the blending of the Landsat and MODIS surface reflectance: Predicting daily Landsat surface reflectance. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2207–2218. [Google Scholar]
- Zheng, B.; Campbell, J.B.; de Beurs, K.M. Remote sensing of crop residue cover using multi-temporal Landsat imagery. Remote Sens. Environ. 2012, 117, 177–183. [Google Scholar] [CrossRef]
- Oh, Y.; Sarabandi, K.; Ulaby, F.T. An inversion algorithm to retrieve soil moisture and surface roughness from polarimetric radar observations. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Pasadena, CA, USA, 8–12 August 1994; pp. 1582–1584. [Google Scholar]
- Lebourgeois, V.; Begue, A.; Degenne, P.; Bappel, E. Improving sugarcane harvest and planting monitoring for smallholders with geospatial technology: The Reunion island experience. Int. Sugar J. 2007, 109, 109–119. [Google Scholar]
- Aguiar, D.A.; Rudorff, B.F.T.; Adami, M.; Shimabukuro, Y.E. Imagens de sensoriamento remoto no monitoramento da colheita da cana-de-açúcar. Eng. Agrícola 2009, 29, 440–451. [Google Scholar] [CrossRef]
- El Hajj, M.; Begue, A.; Guillaume, S.; Martine, J.F. Integrating SPOT-5 time series, crop growth modeling and expert knowledge for monitoring agricultural practices—The case of sugarcane harvest on Reunion island. Remote Sens. Environ. 2009, 113, 2052–2061. [Google Scholar] [CrossRef]
- Baghdadi, N.; Boyer, N.; Todoroff, P.; El Hajj, M.; Begue, A. Potential of SAR sensors TerraSAR-X, ASAR/ENVISAT and PALSAR/ALOS for monitoring sugarcane crops on Reunion island. Remote Sens. Environ. 2009, 113, 1724–1738. [Google Scholar] [CrossRef]
- Baghdadi, N.; Cresson, R.; Todoroff, P.; Moinet, S. Multitemporal observations of sugarcane by TerraSAR-X images. Sensors 2010, 10, 8899–8919. [Google Scholar] [CrossRef] [PubMed]
- Chang, C.H.; Liu, C.C.; Tseng, P.Y. Emissions inventory for rice straw open burning in Taiwan based on burned area classification and mapping using Formosat-2 satellite imagery. Aerosol Air Qual. Res. 2013, 13, 474–487. [Google Scholar] [CrossRef]
- Tsao, C.-C.; Campbell, J.E.; Mena-Carrasco, M.; Spak, S.N.; Carmichael, G.R.; Chen, Y. Increased estimates of air-pollution emissions from Brazilian sugar-cane ethanol. Nat. Clim. Chang. 2012, 2, 53–57. [Google Scholar] [CrossRef]
- Mello, M.P.; Vieira, C.A.O.; Rudorff, B.F.T.; Aplin, P.; Santos, R.D.C.; Aguiar, D.A. Stars: A new method for multitemporal remote sensing. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1897–1913. [Google Scholar] [CrossRef]
- Mulianga, B.; Begue, A.; Simoes, M.; Clouvel, P.; Todoroff, P. Estimating potential soil erosion for environmental services in a sugarcane growing area using multisource remote sensing data. In Proceedings of the Remote Sensing for Agriculture, Ecosystems, and Hydrology, Dresden, Germany, 23–26 September 2013; Neale, C.M.U., Maltese, A., Eds.; Volume 8887. [Google Scholar]
- Goltz, E.; Arcoverde, G.F.B.; de Aguiar, D.A.; Rudorff, B.F.T.; Maeda, E.E. Data mining by decision tree for object oriented classification of the sugar cane cut kinds. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Cape Town, South Africa, 12–17 July 2009; Volume 1–5, pp. 3830–3833. [Google Scholar]
- Aguiar, D.A.; Rudorff, B.F.T.; Silva, W.F.; Adami, M.; Mello, M.P. Remote sensing images in support of environmental protocol: Monitoring the sugarcane harvest in Sao Paulo State, Brazil. Remote Sens. 2011, 3, 2682–2703. [Google Scholar] [CrossRef]
- Liu, C.C.; Tseng, P.Y.; Chen, C.Y. The application of Formosat-2 high-temporal-and high-spatial resolution imagery for monitoring open straw burning and carbon emission detection. Nat. Hazards Earth Syst. Sci. 2013, 13, 575–582. [Google Scholar] [CrossRef]
- Donald, G.E.; Gherardi, S.G.; Edirisinghe, A.; Gittins, S.P.; Henry, D.A.; Mata, G. Using MODIS imagery, climate and soil data to estimate pasture growth rates on farms in the south-west of Western Australia. Anim. Prod. Sci. 2010, 50, 611–615. [Google Scholar] [CrossRef]
- Handcock, R.N.; Mata, G.; Donald, G.E.; Edirisinghe, A.; Henry, D.; Gherardi, S.G. The spectral response of pastures in an intensively managed dairy system. In Innovations in Remote Sensing and Photogrammetry; Springer: Berlin/Heidelberg, Germany, 2009; pp. 309–321. [Google Scholar]
- Phillips, R.; Beeri, O.; Scholljegerdes, E.; Bjergaard, D.; Hendrickson, J. Integration of geospatial and cattle nutrition information to estimate paddock grazing capacity in Northern US prairie. Agric. Syst. 2009, 100, 72–79. [Google Scholar] [CrossRef]
- Gómez Giménez, M.; De Jong, R.; Della Peruta, R.; Keller, A.; Schaepman, M.E. Determination of grassland use intensity based on multi-temporal remote sensing data and ecological indicators. Remote Sens. Environ. 2017, 198, 126–139. [Google Scholar] [CrossRef]
- Tamm, T.; Zalite, K.; Voormansik, K.; Talgre, L. Relating Sentinel-1 interferometric coherence to mowing events on grasslands. Remote Sens. 2016, 8, 802. [Google Scholar] [CrossRef]
- Lopes, M.; Fauvel, M.; Girard, S.; Sheeren, D. Object-based classification of grasslands from high resolution satellite image time series using gaussian mean map kernels. Remote Sens. 2017, 9, 688. [Google Scholar] [CrossRef]
- Lopes, M.; Fauvel, M.; Ouin, A.; Girard, S. Spectro-temporal heterogeneity measures from dense high spatial resolution satellite image time series: Application to grassland species diversity estimation. Remote Sens. 2017, 9, 993. [Google Scholar] [CrossRef]
- Magiera, A.; Feilhauer, H.; Waldhardt, R.; Wiesmair, M.; Otte, A. Modelling biomass of mountainous grasslands by including a species composition map. Ecol. Indic. 2017, 78, 8–18. [Google Scholar] [CrossRef]
- Ullah, S.; Si, Y.; Schlerf, M.; Skidmore, A.K.; Shafique, M.; Iqbal, I.A. Estimation of grassland biomass and nitrogen using MERIS data. Int. J. Appl. Earth Obs. Geoinf. 2012, 19, 196–204. [Google Scholar] [CrossRef]
- Dusseux, P.; Gong, X.; Hubert-Moy, L.; Corpetti, T. Identification of grassland management practices from leaf area index time series. J. Appl. Remote Sens. 2014, 8, 083559. [Google Scholar] [CrossRef]
- Dusseux, P.; Gong, X.; Corpetti, T.; Hubert-Moy, L.; Corgne, S. Contribution of radar images for grassland management identification. In Proceedings of the SPIE Remote Sensing for Agriculture, Ecosystems, and Hydrology, Edinburgh, UK, 24–26 September 2012; p. 853104. [Google Scholar]
- Bellvert, J.; Marsal, J.; Girona, J.; Zarco-Tejada, P.J. Seasonal evolution of crop water stress index in grapevine varieties determined with high-resolution remote sensing thermal imagery. Irrig. Sci. 2015, 33, 81–93. [Google Scholar] [CrossRef]
- Fortes, C.; Demattê, J.A.M. Discrimination of sugarcane varieties using Landsat 7 ETM+ spectral data. Int. J. Remote Sens. 2007, 27, 1395–1412. [Google Scholar] [CrossRef]
- Cemin, G.; Ducati, J.R. Spectral discrimination of grape varieties and a search for terroir effects using remote sensing. J. Wine Res. 2011, 22, 57–78. [Google Scholar] [CrossRef]
- Brach, E.J.; Molnar, J.M.; Jasmin, J.J. Detection of lettuce maturity and variety by remote-sensing techniques. J. Agric. Eng. Res. 1977, 22, 45–54. [Google Scholar] [CrossRef]
- Shahi, U.P.; Kumar, S.; Singh, N.P.; Chaubey, A.K.; Kumar, Y. Potato varietal discrimination using ground based multiband radiometer. J. Indian Soc. Remote Sens. 2007, 35, 53–65. [Google Scholar] [CrossRef]
- Ducati, J.R.; Sarate, R.E.; Fachel, J.M.G. Application of remote sensing techniques to discriminate between conventional and organic vineyards in the Loire valley, France. J. Int. Sci. Vigne Vin 2014, 48. [Google Scholar] [CrossRef]
- Everingham, Y.; Lowe, K.H.; Donald, D.; Coomans, D.; Markley, J. Advanced satellite imagery to classify sugarcane crop characteristics. Agron. Sustain. Dev. 2007, 27, 111–117. [Google Scholar] [CrossRef]
- Galvao, L.S.; Formaggio, A.R.; Tisot, D.A. Discrimination of sugarcane varieties in southeastern Brazil with EO-1 Hyperion data. Remote Sens. Environ. 2005, 94, 523–534. [Google Scholar] [CrossRef]
- Lacar, F.M.; Lewis, M.M.; Grierson, I.T. Use of hyperspectral imagery for mapping grape varieties in the Barossa valley, South Australia. In Proceedings of the IEEE International Geosciences and Remote Sensing Symposium (IGARSS), Sydney, NSW, Australia, 9–13 July 2001; pp. 2875–2877. [Google Scholar]
- Ferreiro-Arman, M.; Alba-Castro, J.L.; Homayouni, S.; da Costa, J.P.; Martin-Herrero, J. Vine variety discrimination with airborne imaging spectroscopy. In Proceedings of the SPIE IVth Conference on Remote Sensing and Modeling of Ecosystems for Sustainability Proceedings, San Antonio, CA, USA, 29–29 August 2007. [Google Scholar]
- Kumar, P.V.; Ramakrishna, Y.S.; Rao, D.V.B.; Sridhar, G.; Rao, G.S.; Rao, G. Use of remote sensing for drought stress monitoring, yield prediction and varietal evaluation in castor beans (Ricinus communis L.). Int. J. Remote Sens. 2005, 26, 5525–5534. [Google Scholar] [CrossRef]
- Sanches, I.D.; Gurtler, S.; Formaggio, A.R. Discrimination of citrus varieties using CCD/CBERS-2 satellite imagery. Ciênc. Rural 2008, 38, 103–108. [Google Scholar] [CrossRef]
- Karakizi, C.; Oikonomou, M.; Karantzalos, K. Vineyard detection and vine variety discrimination from very high resolution satellite data. Remote Sens. 2016, 8, 235. [Google Scholar] [CrossRef]
- Altieri, M.A. The ecological role of biodiversity in agroecosystems. Agric. Ecosyst. Environ. 1999, 74, 19–31. [Google Scholar] [CrossRef]
- Baudry, J.; Bunce, R.G.H.; Burel, F. Hedgerows: An international perspective on their origin, function and management. J. Environ. Manag. 2000, 60, 7–22. [Google Scholar] [CrossRef]
- Mulder, V.L.; de Bruin, S.; Schaepman, M.E.; Mayr, T.R. The use of remote sensing in soil and terrain mapping—A review. Geoderma 2011, 162, 1–19. [Google Scholar] [CrossRef]
- Ducrot, D.; Duthoit, S.; d’Abzac, A.; Marais-Sicre, C.; Chéret, V.; Sausse, C. Identification and characterization of agro-ecological infrastructures by remote sensing. In Proceedings of the SPIE XVII Remote Sensing for Agriculture, Ecosystems, and Hydrology, Toulouse, France, 22–24 September 2015; pp. 96372H1–96372H15. [Google Scholar]
- Forman, R.T.T.; Baudry, J. Hedgerows and hedgerow networks in landscape ecology. Environ. Manag. 1984, 8, 495–510. [Google Scholar] [CrossRef]
- Davies, Z.G.; Pullin, A.S. Are hedgerows effective corridors between fragments of woodland habitat? An evidence-based approach. Landsc. Ecol. 2007, 22, 333–351. [Google Scholar] [CrossRef]
- Lechner, A.; Stein, A.; Jones, S.D.; Ferwerda, J. Remote sensing of small and linear features: Quantifying the effects of patch size and length, grid position and detectability on land cover mapping. Remote Sens. Environ. 2009, 113, 2194–2204. [Google Scholar] [CrossRef]
- Burel, F.; Baudry, J. Structural dynamic of a hedgerow network landscape in Brittany France. Landsc. Ecol. 1990, 4, 197–210. [Google Scholar] [CrossRef]
- Burel, F. Landscape structure effects on carabid beetles spatial patterns in Western France. Landsc. Ecol. 1989, 2, 215–226. [Google Scholar] [CrossRef]
- Torita, H.; Satou, H. Relationship between shelterbelt structure and mean wind reduction. Agric. For. Meteorol. 2007, 145, 186–194. [Google Scholar] [CrossRef]
- Baudry, J.; Burel, F.; Thenail, C.; Le Cœur, D. A holistic landscape ecological study of the interactions between farming activities and ecological patterns in Brittany, France. Landsc. Urban Plan. 2000, 50, 119–128. [Google Scholar] [CrossRef]
- Defra. Hedgerow Survey Handbook. A Standard Procedure for Local Surveys in the UK; Defra: London, UK, 2007.
- Aksoy, S.; Akcay, G.; Cinbis, G.; Wassenaar, T. Automatic mapping of linear woody vegetation features in agricultural landscapes. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Boston, MA, USA, 7–11 July 2008; pp. 403–406. [Google Scholar]
- Bargiel, D. Capabilities of high resolution satellite radar for the detection of semi-natural habitat structures and grasslands in agricultural landscapes. Ecol. Inf. 2013, 13, 9–16. [Google Scholar] [CrossRef]
- Vannier, C.; Vasseur, C.; Hubert-Moy, L.; Baudry, J. Multiscale ecological assessment of remote sensing images. Landsc. Ecol. 2011, 26, 1053–1069. [Google Scholar] [CrossRef]
- Fauvel, M.; Sheeren, D.; Chanussot, J.; Benediktsson, J.A. Hedges detection using local directional features and support vector data description. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012; pp. 2320–2323. [Google Scholar]
- Deng, R.X.; Li, Y.; Wang, W.J.; Zhang, S.W. Recognition of shelterbelt continuity using remote sensing and waveform recognition. Agrofor. Syst. 2013, 87, 827–834. [Google Scholar] [CrossRef]
- Betbeder, J.; Nabucet, J.; Pottier, E.; Baudry, J.; Corgne, S.; Hubert-Moy, L. Detection and characterization of hedgerows using TerraSAR-X imagery. Remote Sens. 2014, 6, 3752–3769. [Google Scholar] [CrossRef]
- Betbeder, J.; Hubert-Moy, L.; Burel, F.; Corgne, S.; Baudry, J. Assessing ecological habitat structure from local to landscape scales using synthetic aperture radar. Ecol. Indic. 2015, 52, 545–557. [Google Scholar] [CrossRef]
- Véga, C.; Durrieu, S. Multi-level filtering segmentation to measure individual tree parameters based on LiDAR data: Application to a mountainous forest with heterogeneous stands. Int. J. Appl. Earth Obs. Geoinf. 2011, 13, 646–656. [Google Scholar] [CrossRef]
- Bisquert, M.; Bégué, A.; Deshayes, M.; Ducrot, D. Environmental evaluation of MODIS-derived land units. GISci. Remote Sens. 2017, 54, 64–77. [Google Scholar] [CrossRef]
- Bellón, B.; Begue, A.; Lo Seen, D.; de Almeida, C.; Simoes, M. A remote sensing approach for regional-scale mapping of agricultural land-use systems based on NDVI time series. Remote Sens. 2017, 9, 600. [Google Scholar] [CrossRef]
- Inglada, J.; Vincent, A.; Arias, M.; Marais-Sicre, C. Improved early crop type identification by joint use of high temporal resolution SAR and optical image time series. Remote Sens. 2016, 8, 362. [Google Scholar] [CrossRef]
- Gaetano, R.; Cozzolino, D.; D’Amiano, R.; Verdoliva, G.; Poggi, G. Fusion of SAR-optical data for land cover monitoring. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017. [Google Scholar]
- Gomez-Chova, L.; Tuia, D.; Moser, G.; Camps-Valls, G. Multimodal Classification of Remote Sensing Images: A Review and Future Directions; IEEE: Piscataway, NJ, USA, 2015; pp. 1560–1584. [Google Scholar]
- Roerink, G.J.; Menenti, M.; Verhoef, W. Reconstructing cloudfree NDVI composites using Fourier analysis of time series. Int. J. Remote Sens. 2000, 21, 1911–1917. [Google Scholar] [CrossRef]
- Inglada, J.; Vincent, A.; Arias, M.; Tardy, B.; Morin, D.; Rodes, I. Operational high resolution land cover map production at the country scale using satellite image time series. Remote Sens. 2017, 9, 95. [Google Scholar] [CrossRef]
- Verburg, P.H.; van de Steeg, J.; Veldkamp, A.; Willemen, L. From land cover change to land function dynamics: A major challenge to improve land characterization. J. Environ. Manag. 2009, 90, 1327–1335. [Google Scholar] [CrossRef] [PubMed]
- Rounsevell, M.D.A.; Pedroli, B.; Erb, K.-H.; Gramberger, M.; Busck, A.G.; Haberl, H.; Kristensen, S.; Kuemmerle, T.; Lavorel, S.; Lindner, M.; et al. Challenges for land system science. Land Use Policy 2012, 29, 899–910. [Google Scholar] [CrossRef]






© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bégué, A.; Arvor, D.; Bellon, B.; Betbeder, J.; De Abelleyra, D.; P. D. Ferraz, R.; Lebourgeois, V.; Lelong, C.; Simões, M.; R. Verón, S. Remote Sensing and Cropping Practices: A Review. Remote Sens. 2018, 10, 99. https://doi.org/10.3390/rs10010099
Bégué A, Arvor D, Bellon B, Betbeder J, De Abelleyra D, P. D. Ferraz R, Lebourgeois V, Lelong C, Simões M, R. Verón S. Remote Sensing and Cropping Practices: A Review. Remote Sensing. 2018; 10(1):99. https://doi.org/10.3390/rs10010099
Chicago/Turabian StyleBégué, Agnès, Damien Arvor, Beatriz Bellon, Julie Betbeder, Diego De Abelleyra, Rodrigo P. D. Ferraz, Valentine Lebourgeois, Camille Lelong, Margareth Simões, and Santiago R. Verón. 2018. "Remote Sensing and Cropping Practices: A Review" Remote Sensing 10, no. 1: 99. https://doi.org/10.3390/rs10010099
APA StyleBégué, A., Arvor, D., Bellon, B., Betbeder, J., De Abelleyra, D., P. D. Ferraz, R., Lebourgeois, V., Lelong, C., Simões, M., & R. Verón, S. (2018). Remote Sensing and Cropping Practices: A Review. Remote Sensing, 10(1), 99. https://doi.org/10.3390/rs10010099