Proximity Warning and Excavator Control System for Prevention of Collision Accidents


Abstract
1. Introduction
2. Research Trend
2.1. Review of Proximity Warning Technology
2.2. Summary of Previous Research
3. Research Motivation and Scope
4. Proximity Warning and Excavator Control System
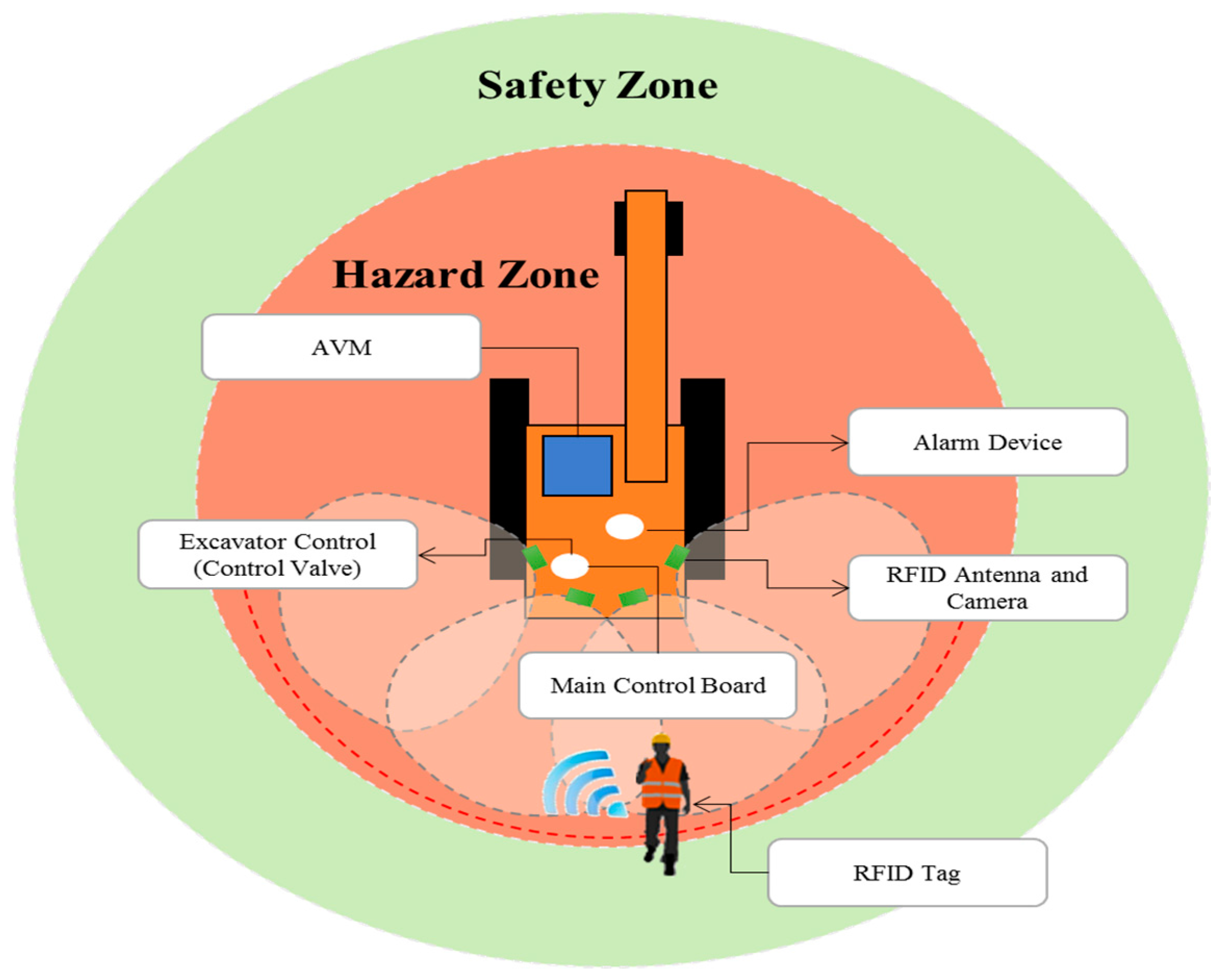
4.1. System Concept
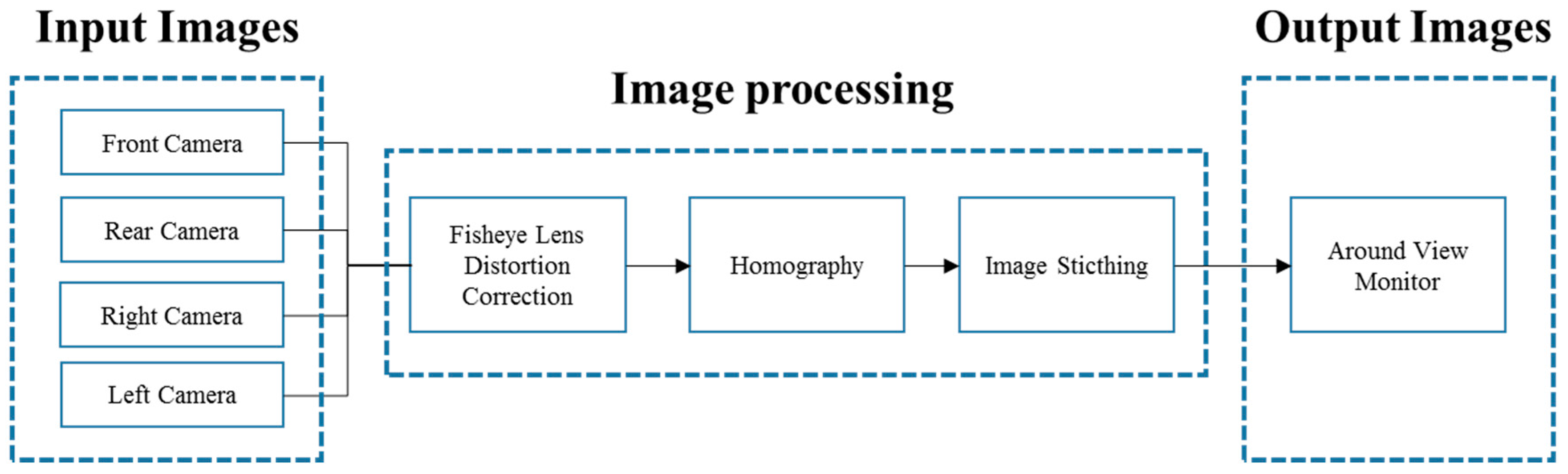
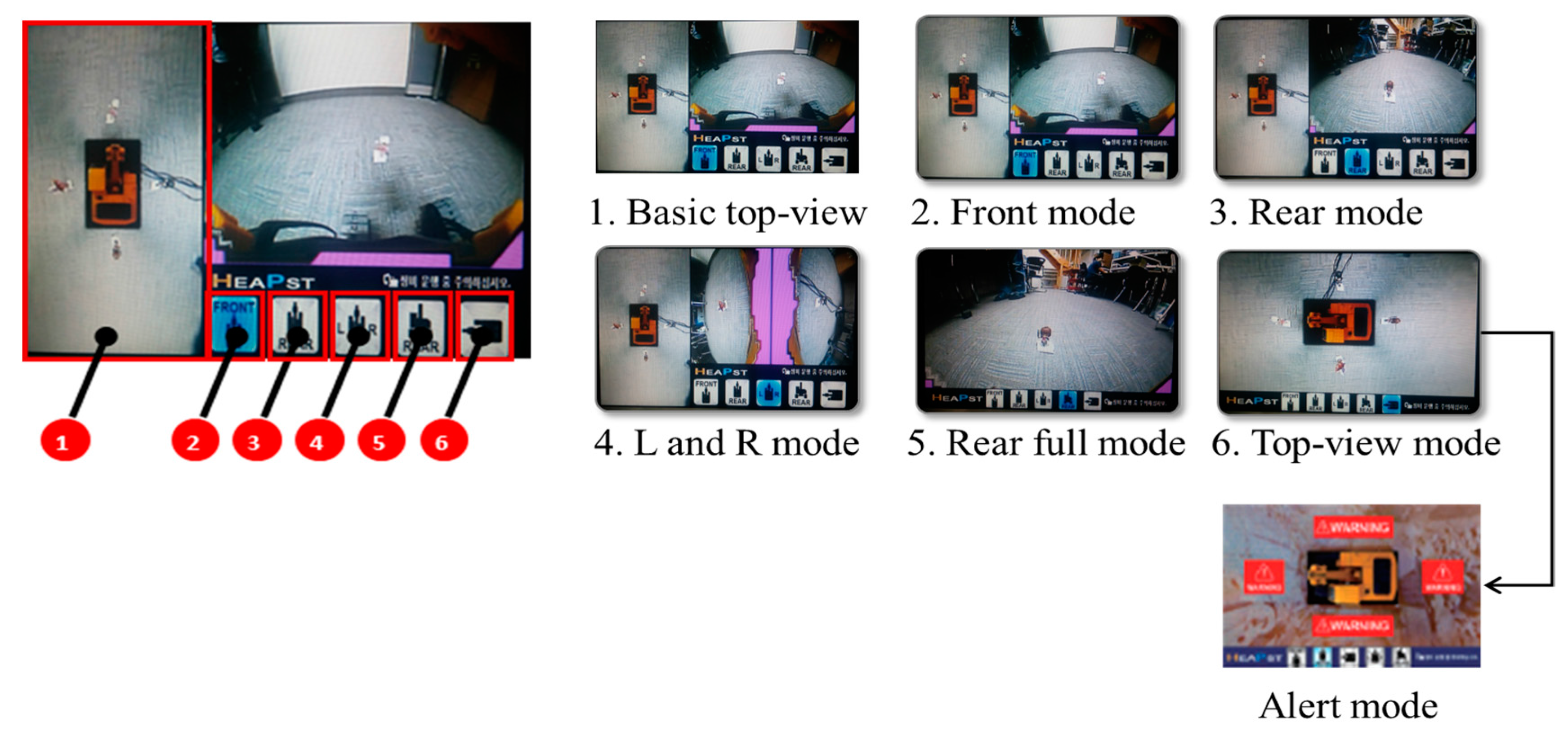
4.2. AVM System
4.3. RFID System
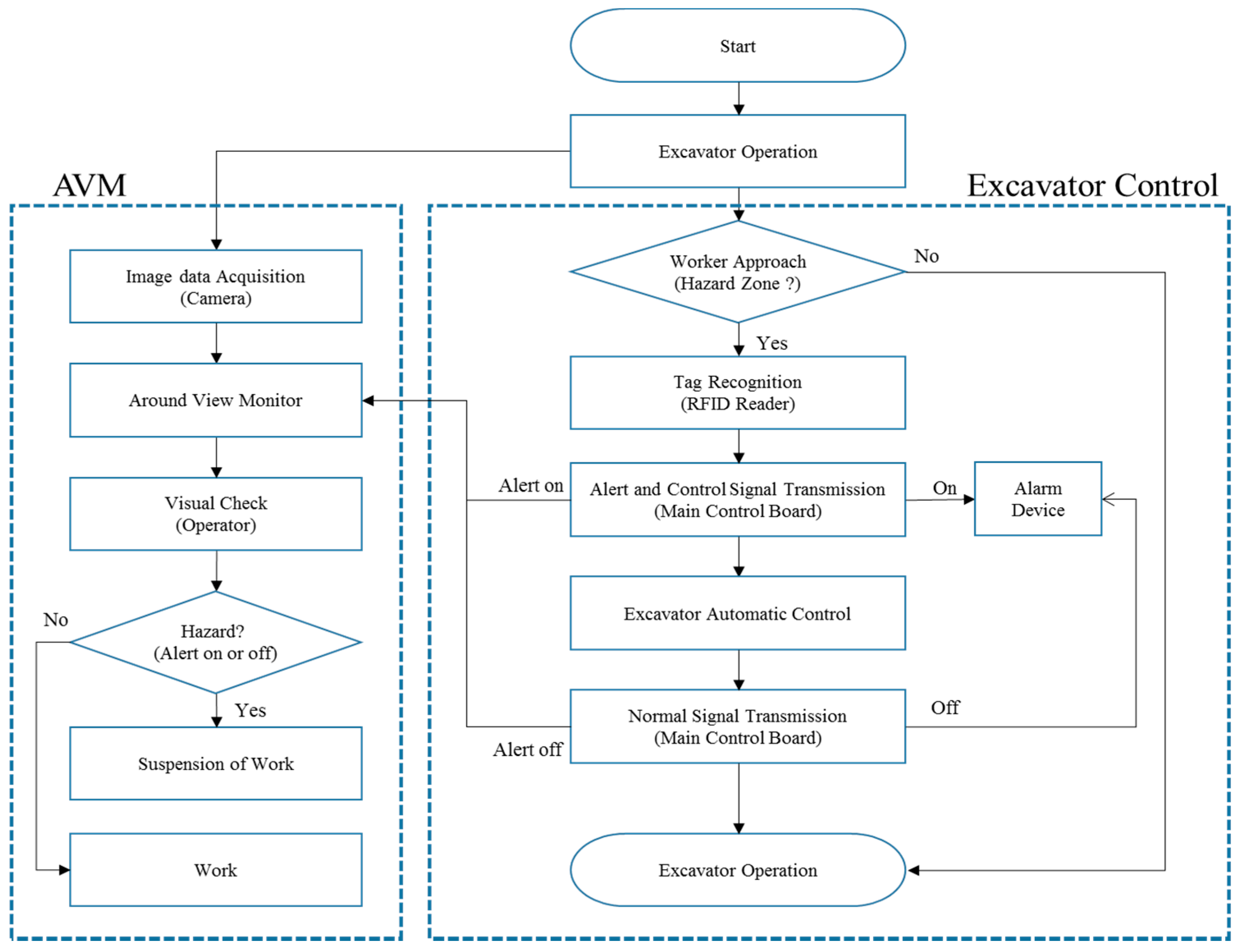
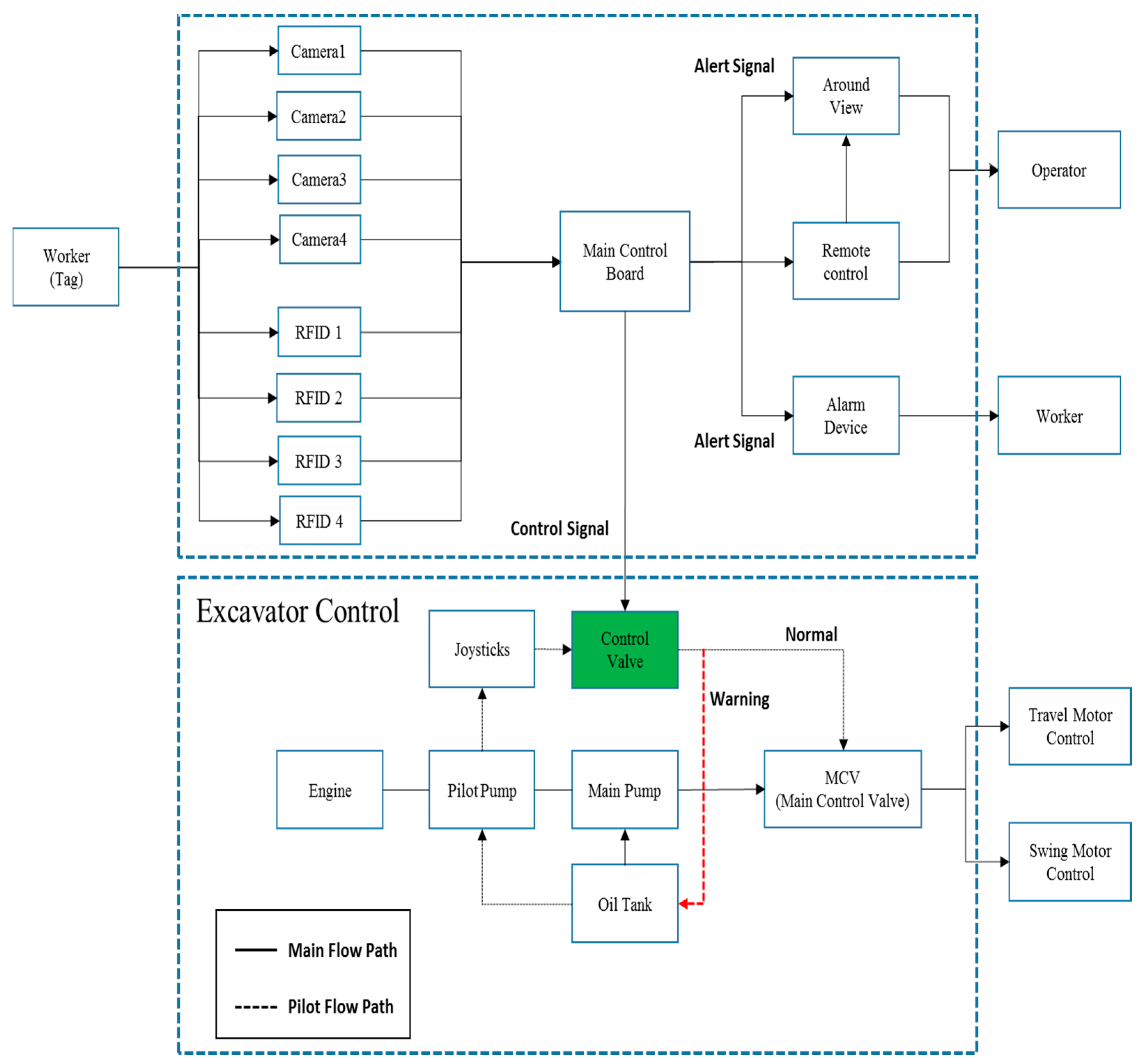
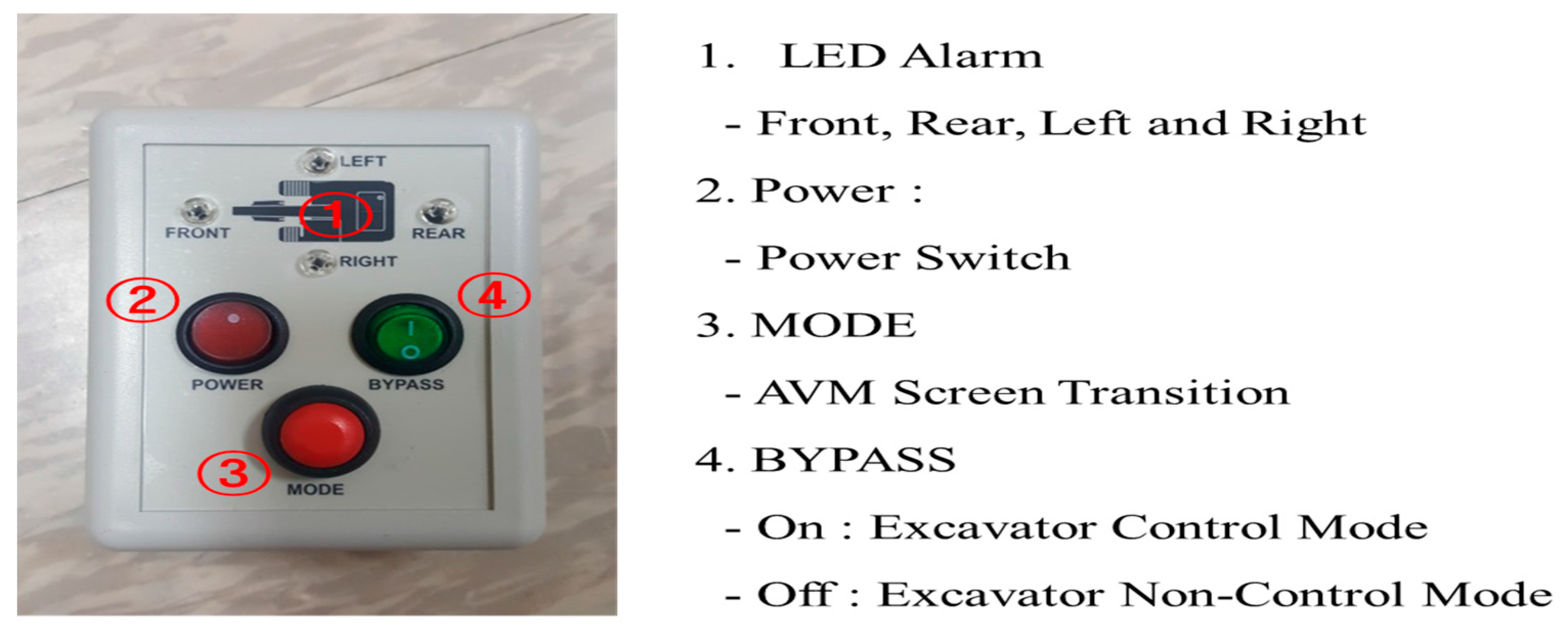
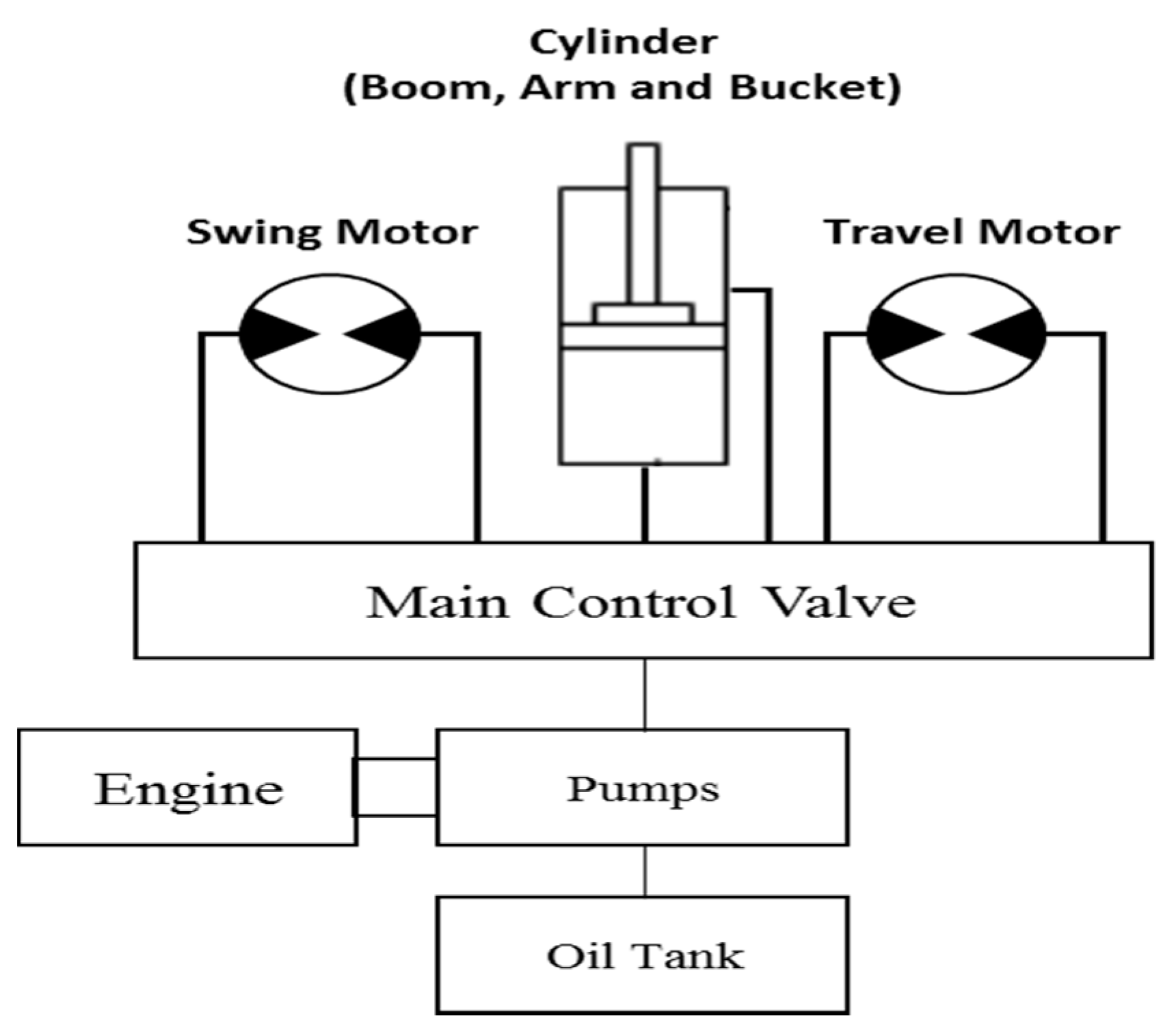
4.4. Excavator Control System
5. Experiments
5.1. Temperature Cycle Test
5.2. Reliability of AVM System
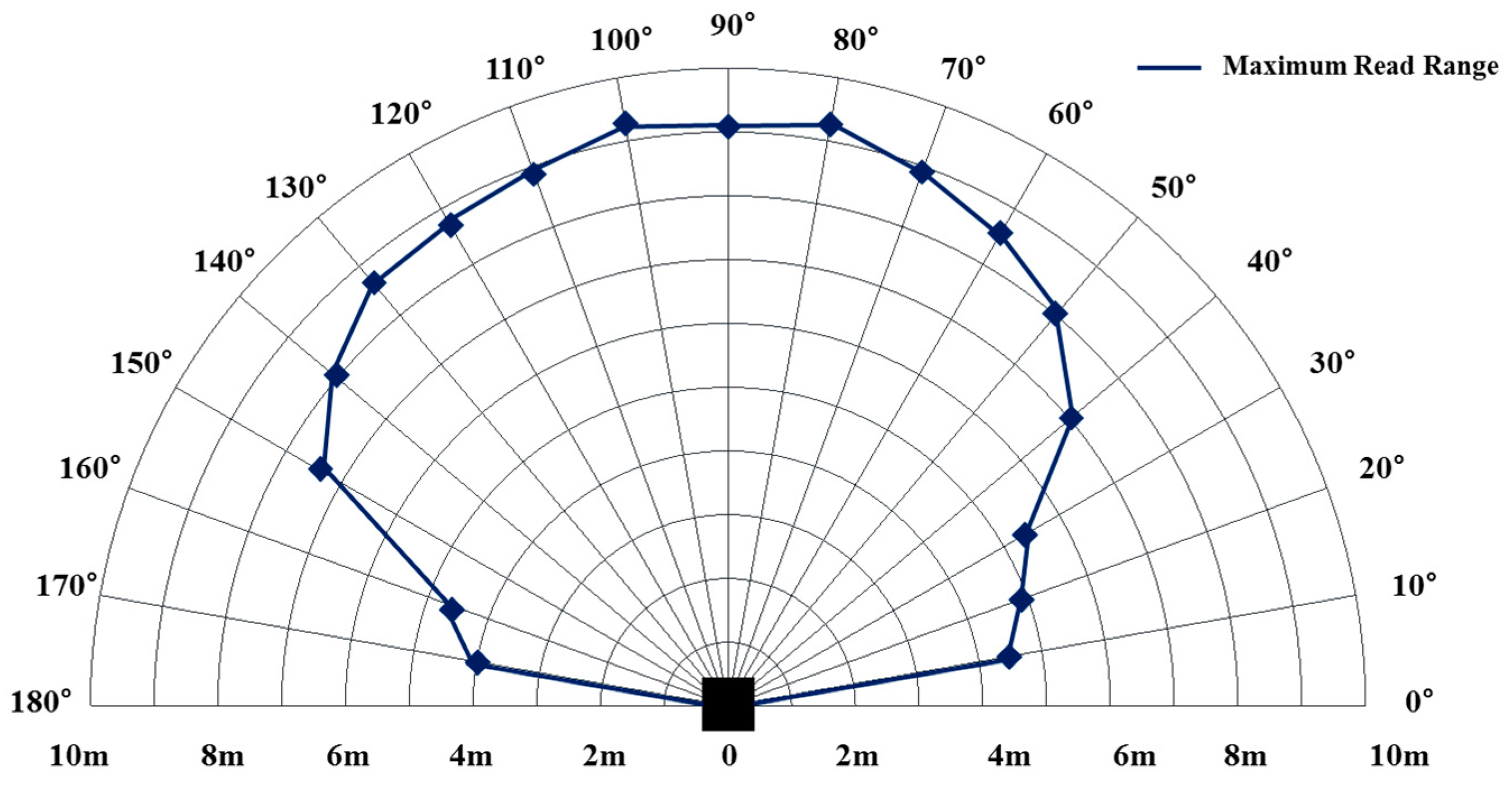
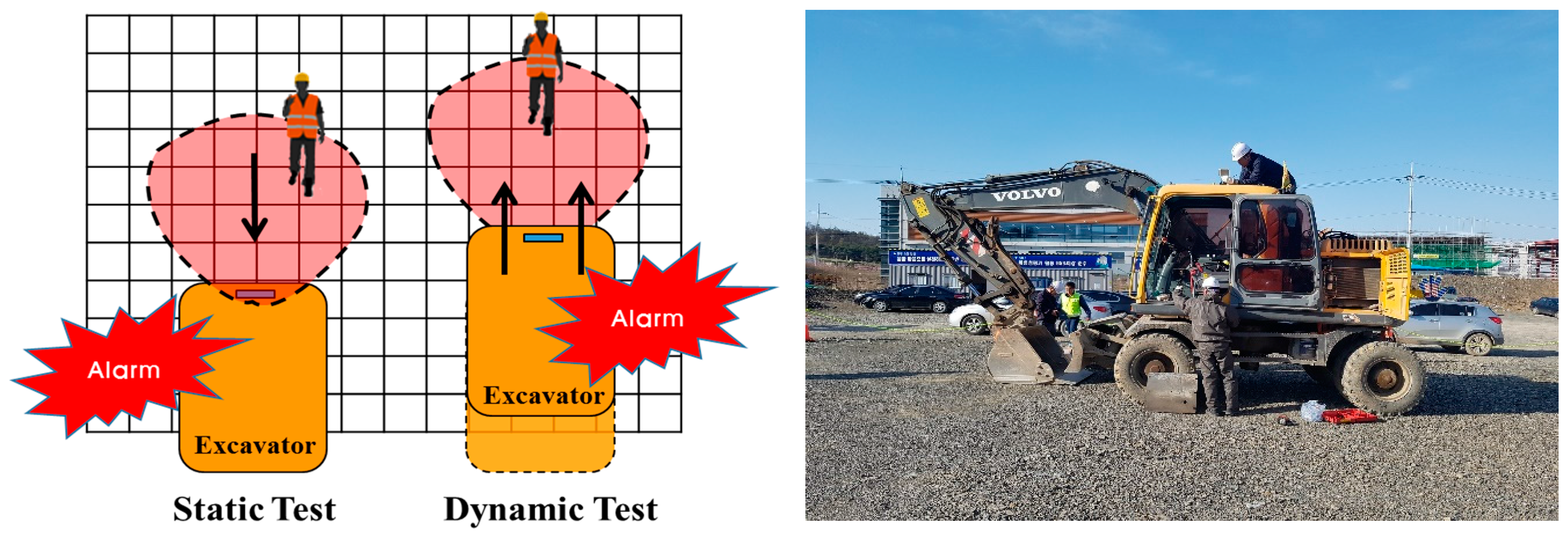
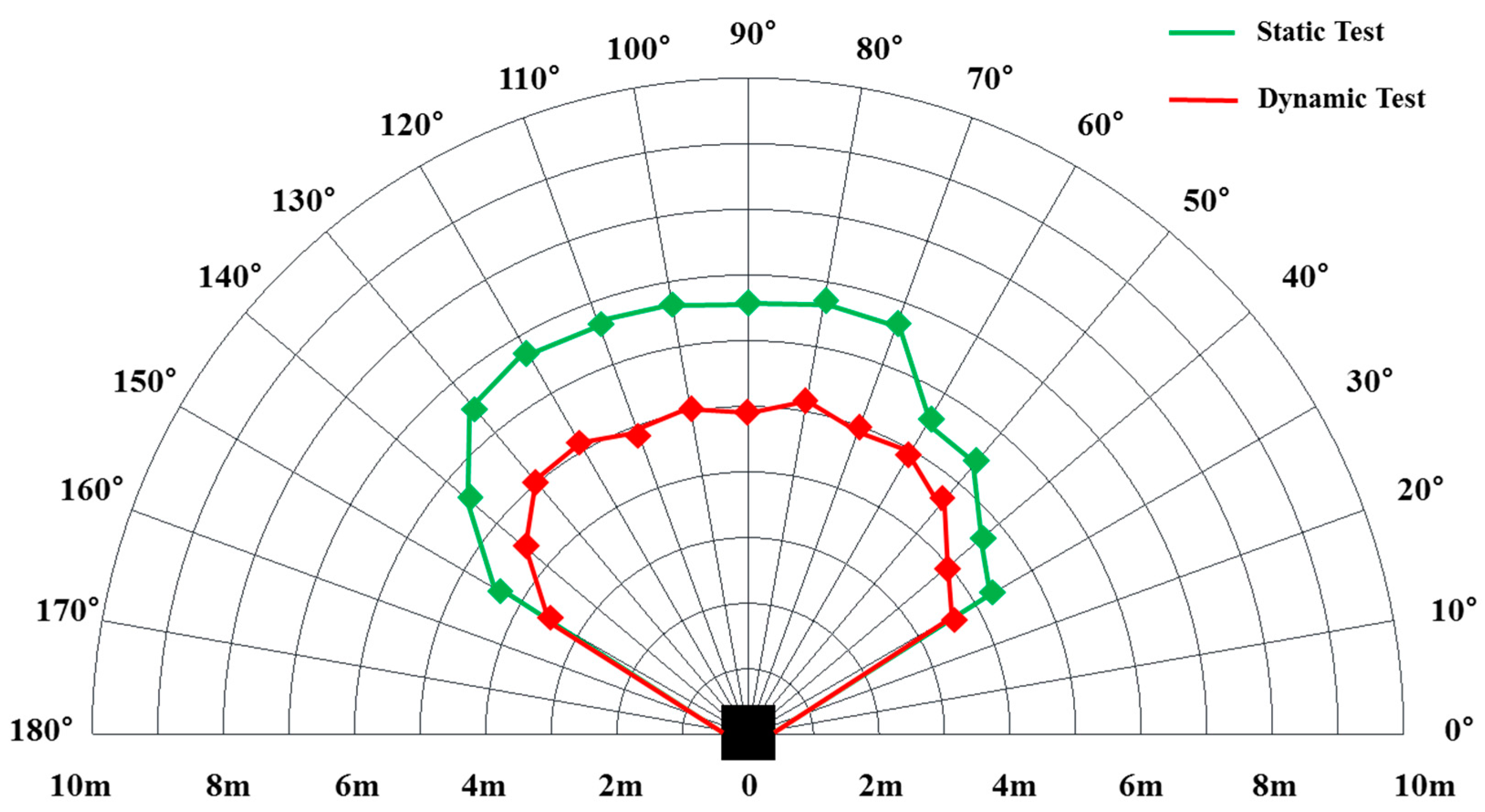
5.3. RFID Detection Area Test
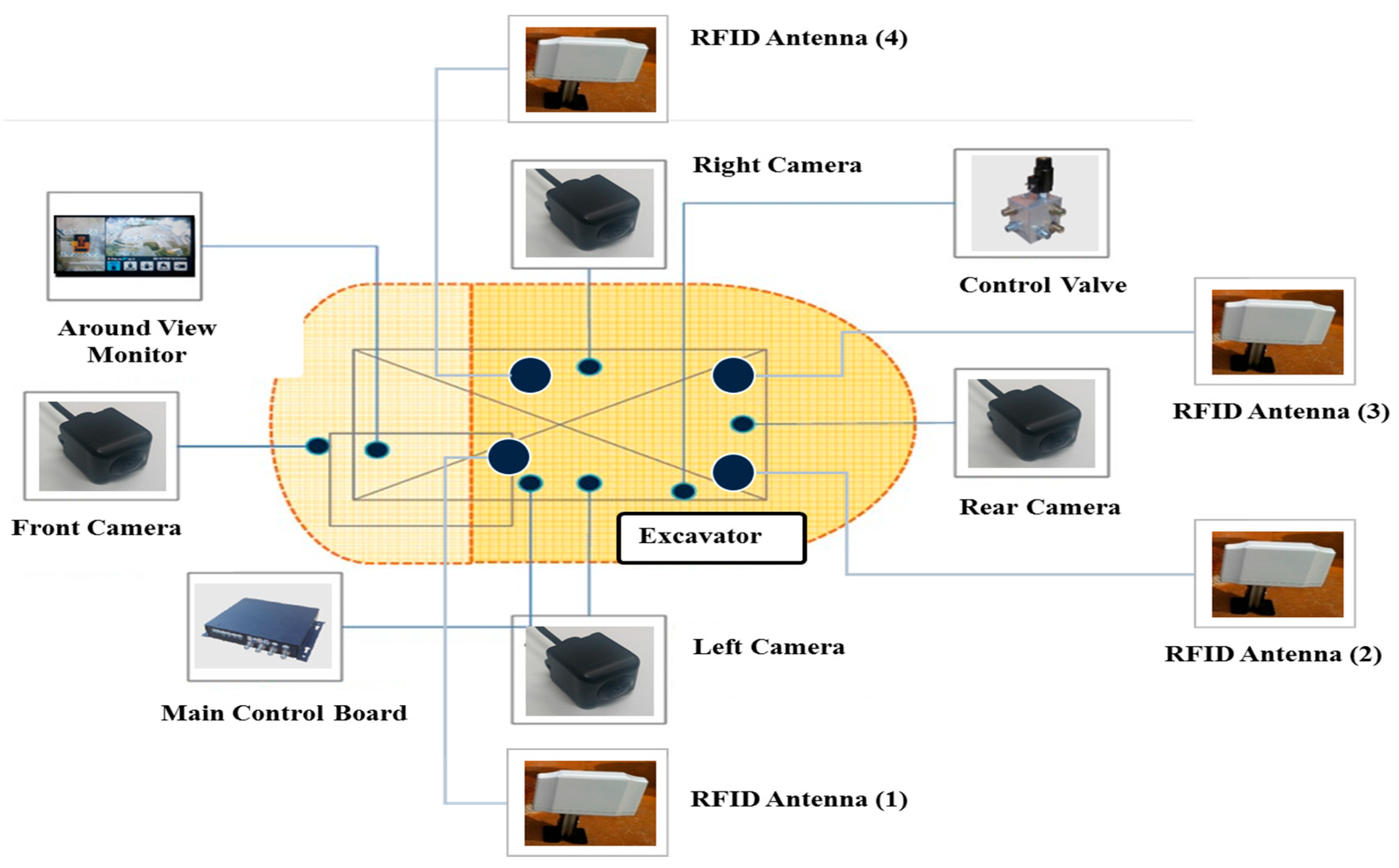
5.4. Total System Test
- (1)
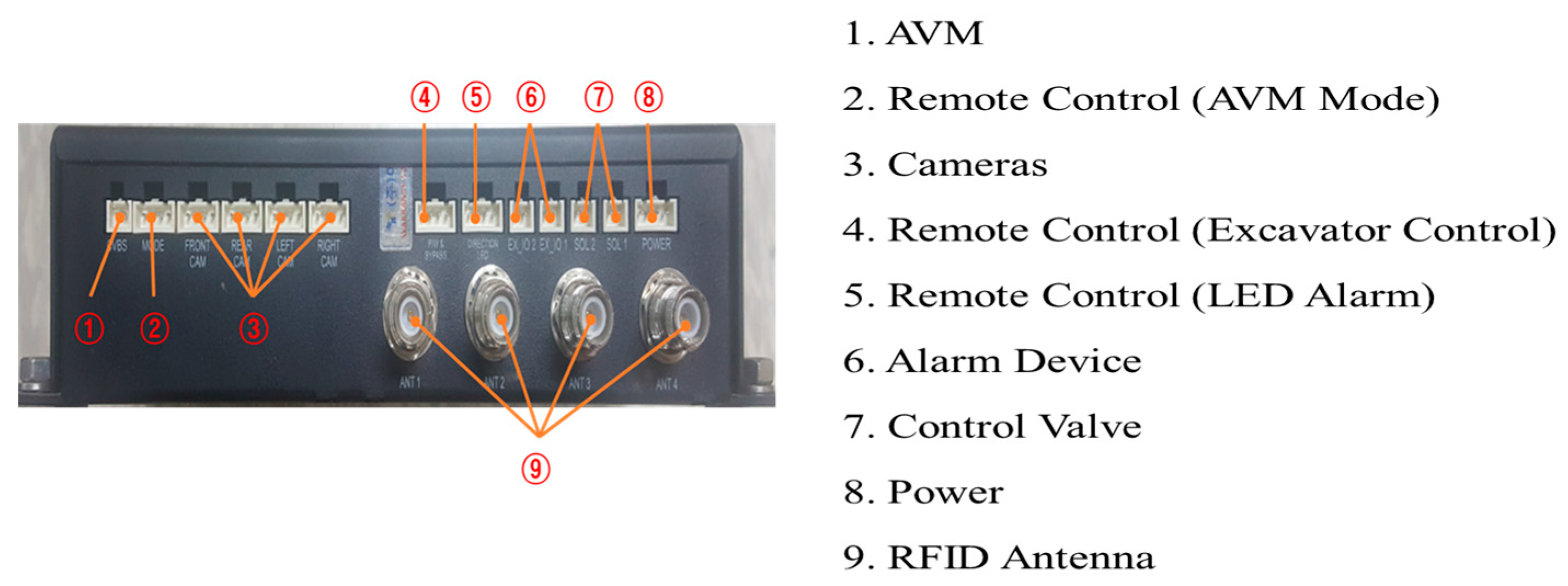
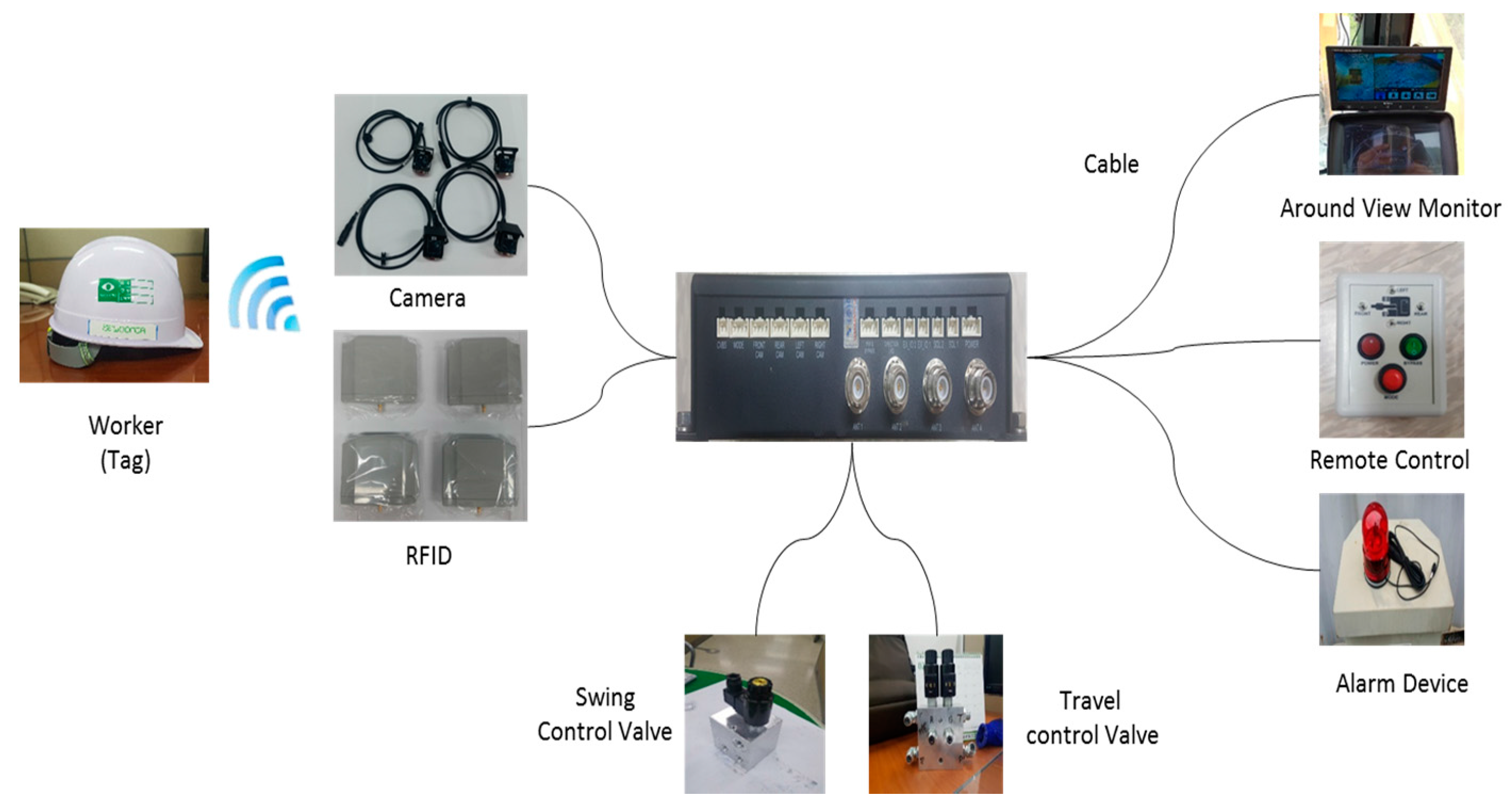
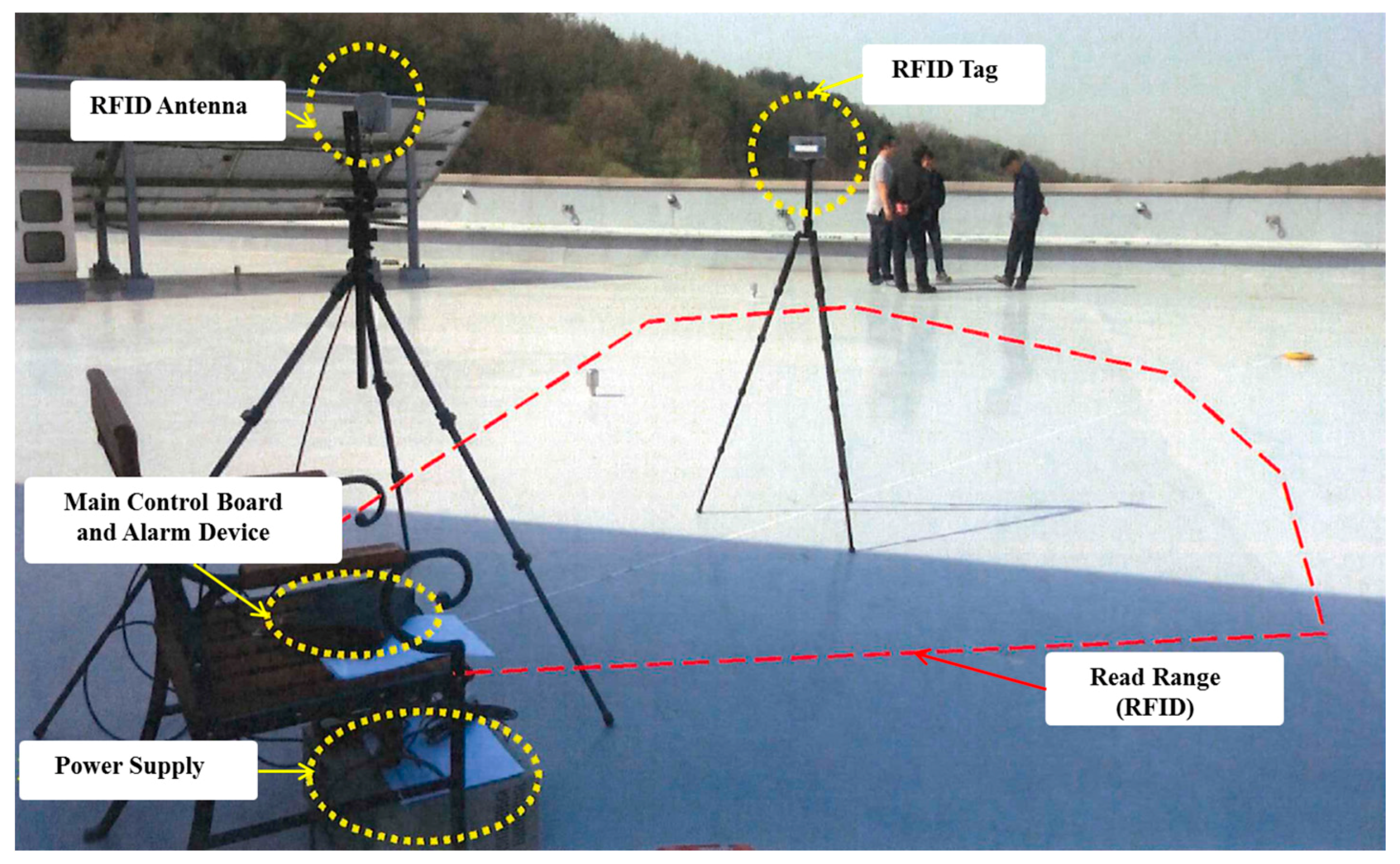
- Install proximity warning and excavator control system to equipment (4-RFID antennas, main control board, an alarm device, 4-fisheye cameras, and display device) and workers (RFID tag), Figure 19. Depending on the equipment type and field conditions, the detection area can be changed by adjusting the installation position and angle of the RFID antenna.
- (2)
- Connect the control block between the joystick of the excavator and the MCV.
- (3)
- Connect all devices to the main control board with cables.
- (4)
- Allow workers to approach RFID antennas or fisheye cameras at a slow pace over long distances.
- (5)
- Ensure that the system is activated and the excavator stops operating.
6. Limitations and Future Research
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zhou, W.; Whyte, J.; Sacks, R. Construction safety and digital design: A review. Autom. Constr. 2012, 22, 102–111. [Google Scholar] [CrossRef]
- Unsar, S.; Sut, N. General assessment of the occupational accidents that occurred in Turkey between the years 2000 and 2005. Saf. Sci. 2009, 47, 614–619. [Google Scholar] [CrossRef]
- Fabiano, B.; Currò, F.; Reverberi, A.P.; Pastorino, R. A statistical study on temporary work and occupational accidents: Specific risk factors and risk management strategies. Saf. Sci. 2008, 46, 535–544. [Google Scholar] [CrossRef]
- Jo, B.W.; Lee, Y.S.; Kim, J.H.; Khan, R.M.A. Trend analysis of construction industrial accidents in Korea from 2011 to 2015. Sustainability 2017, 9, 1297. [Google Scholar] [CrossRef]
- Teizer, J.; Allread, B.S.; Fullerton, C.E.; Hinze, J. Autonomous pro-active real-time construction worker and equipment operator proximity safety alert system. Autom. Constr. 2010, 19, 630–640. [Google Scholar] [CrossRef]
- Ray, S.J.; Teizer, J. Computing 3D blind spots of construction equipment: Implementation and evaluation of an automated measurement and visualization method utilizing range point cloud data. Autom. Constr. 2013, 36, 95–107. [Google Scholar] [CrossRef]
- Zhou, Z.; Goh, Y.M.; Li, Q. Overview and analysis of safety management studies in the construction industry. Saf. Sci. 2015, 72, 337–350. [Google Scholar] [CrossRef]
- Skibniewski, M.J. Research trends in information technology applications in construction safety engineering and management. Front. Eng. Manag. 2015, 1, 246–259. [Google Scholar] [CrossRef]
- Fosbroke, D. Niosh reports! Studies on heavy equipment blind spots and internal traffic control. In Proceedings of the 2004 Roadway Work Zone Safety & Health Conference, Baltimore, MD, USA, 4 November 2004. [Google Scholar]
- Zhu, Z.; Park, M.-W.; Koch, C.; Soltani, M.; Hammad, A.; Davari, K. Predicting movements of onsite workers and mobile equipment for enhancing construction site safety. Autom. Constr. 2016, 68, 95–101. [Google Scholar] [CrossRef]
- Lee, H.-S.; Lee, K.-P.; Park, M.; Baek, Y.; Lee, S. Rfid-based real-time locating system for construction safety management. J. Comput. Civ. Eng. 2011, 26, 366–377. [Google Scholar] [CrossRef]
- Teizer, J. Magnetic field proximity detection and alert technology for safe heavy construction equipment operation, ISARC. In Proceedings of the 32nd International Symposium on Automation and Robotics in Construction, Oulu, Finland, 15–18 June 2015. [Google Scholar]
- Seo, J.; Han, S.; Lee, S.; Kim, H. Computer vision techniques for construction safety and health monitoring. Adv. Eng. Inf. 2015, 29, 239–251. [Google Scholar] [CrossRef]
- Mine Safety and Health Administration (MSHA). Safety standards for surface haulage—Proposed rule. In Federal Register; Mine Safety and Health Administration: Arlington, VA, USA, 1998; Volume 63. [Google Scholar]
- Ruff, T.M. Test Results of Collision Warning Systems for Surface Mining Dump Trucks; U.S. Department of Health and Human Services, Public Health Service, Centers for Disease Control and Prevention, National Institute for Occupational Safety and Health, Pittsburgh Research Laboratory: Pittsburgh, PA, USA, 2000. [Google Scholar]
- Ruff, T. Recommendations for Evaluating and Implementing Proximity Warning Systems on Surface Mining Equipment; U.S. Department of Health and Human Services, Public Health Service, Centers for Disease Control and Prevention, National Institute for Occupational Safety and Health, Spokane Research Laboratory: Spokane, WA, USA, 2007. [Google Scholar]
- Schiffbauer, W.H. Active proximity warning system for surface and underground mining applications. Min. Eng. 2002, 54, 40–48. [Google Scholar]
- Nieto, A. Development of a Real-Time Proximity Warning and 3D Mapping System Based on Wireless Networks, Virtual Reality Graphics, and GPS to Improve safety in Open-Pit Mines. Ph.D. Thesis, Colorado School of Mines, Golden, CO, USA, 2001. [Google Scholar]
- Nieto, A.; Dagdelen, K. Development and testing of a vehicle collision avoidance system based on GPS and wireless networks for open-pit mines. In Application of Computers and Operations Research in the Minerals Industries; Society for Mining, Metallurgy, and Exploration, Inc.: Littleton, CO, USA, 2003. [Google Scholar]
- Ruff, T.M.; Holden, T.P. Preventing collisions involving surface mining equipment: A GPS-based approach. J. Saf. Res. 2003, 34, 175–181. [Google Scholar] [CrossRef]
- Nieto, A.; Miller, S.; Miller, R. GPS proximity warning system for at-rest large mobile equipment. Int. J. Surf. Min. Reclam. Environ. 2005, 19, 75–84. [Google Scholar] [CrossRef]
- Sabniveesu, V.; Kavuri, A.; Kavi, R.; Kulathumani, V.; Kecojevic, V.; Nimbarte, A. Use of wireless, ad-hoc networks for proximity warning and collision avoidance in surface mines. Int. J. Min. Reclam. Environ. 2015, 29, 331–346. [Google Scholar]
- Oloufa, A.A.; Ikeda, M.; Oda, H. Situational awareness of construction equipment using GPS, wireless and web technologies. Autom. Constr. 2003, 12, 737–748. [Google Scholar] [CrossRef]
- Lee, U.K.; Kim, J.H.; Cho, H.; Kang, K.I. Development of a mobile safety monitoring system for construction sites. Autom. Constr. 2009, 18, 258–264. [Google Scholar] [CrossRef]
- Chae, S.; Yoshida, T. Application of rfid technology to prevention of collision accident with heavy equipment. Autom. Constr. 2010, 19, 368–374. [Google Scholar] [CrossRef]
- Wu, W.; Yang, H.; Chew, D.A.; Yang, S.-H.; Gibb, A.G.; Li, Q. Towards an autonomous real-time tracking system of near-miss accidents on construction sites. Autom. Constr. 2010, 19, 134–141. [Google Scholar] [CrossRef]
- Wu, W.; Yang, H.; Li, Q.; Chew, D. An integrated information management model for proactive prevention of struck-by-falling-object accidents on construction sites. Autom. Constr. 2013, 34, 67–74. [Google Scholar] [CrossRef]
- Yang, H.; Chew, D.A.; Wu, W.; Zhou, Z.; Li, Q. Design and implementation of an identification system in construction site safety for proactive accident prevention. Accid. Anal. Prev. 2012, 48, 193–203. [Google Scholar] [CrossRef] [PubMed]
- Kelm, A.; Laußat, L.; Meins-Becker, A.; Platz, D.; Khazaee, M.J.; Costin, A.M.; Helmus, M.; Teizer, J. Mobile passive radio frequency identification (rfid) portal for automated and rapid control of personal protective equipment (ppe) on construction sites. Autom. Constr. 2013, 36, 38–52. [Google Scholar] [CrossRef]
- Marks, E.D.; Teizer, J. Method for testing proximity detection and alert technology for safe construction equipment operation. Constr. Manag. Econ. 2013, 31, 636–646. [Google Scholar] [CrossRef]
- Choe, S.; Leite, F.; Seedah, D.; Caldas, C. Evaluation of sensing technology for the prevention of backover accidents in construction work zones. J. Inf. Technol. Constr. 2014, 19, 1–19. [Google Scholar]
- Ruff, T.M. New technology to monitor blind areas near surface mining equipment. In Proceedings of the 38th IAS Annual Meeting, Industry Applications Conference, Salt Lake City, UT, USA, 12–16 October 2003. [Google Scholar]
- Ruff, T.M. Monitoring blind spots. Eng. Min. J. 2001, 202, 17–26. [Google Scholar]
- Riaz, Z.; Edwards, D.; Thorpe, A. Sightsafety: A hybrid information and communication technology system for reducing vehicle/pedestrian collisions. Autom. Constr. 2006, 15, 719–728. [Google Scholar] [CrossRef]
- Ruff, T. Evaluation of a radar-based proximity warning system for off-highway dump trucks. Accid. Anal. Prev. 2006, 38, 92–98. [Google Scholar] [CrossRef] [PubMed]
- Guenther, N.; Salow, H. Collision Avoidance and Operator Guidance-Innovating Mine Vehicle Safety; SICK: Heidelberg West, Australia, 2012. [Google Scholar]
- Ruff, T.M.; Hession-Kunz, D. Application of radio-frequency identification systems to collision avoidance in metal/nonmetal mines. IEEE Trans. Ind. Appl. 2001, 37, 112–116. [Google Scholar] [CrossRef]
- Suhr, J.K.; Jung, H.G. Fully-automatic recognition of various parking slot markings in Around View Monitor (avm) image sequences. In Proceedings of the 15th International IEEE Conference on Intelligent Transportation Systems (ITSC), Anchorage, AK, USA, 16–19 September 2012. [Google Scholar]
- Pujol Miró, A. Real-Time image Stitching for Automotive 360° Vision Systems. Bachelor’s Thesis, Universitat Politècnica de Catalunya, Barcelona, Spain, 2014. [Google Scholar]
- Brown, D.C. Decentering distortion of lenses. Photogramm. Eng. Remote Sens. 1966, 32, 444–462. [Google Scholar]
- Tsai, R. A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf tv cameras and lenses. IEEE J. Robot. Autom. 1987, 3, 323–344. [Google Scholar] [CrossRef]
- Devernay, F.; Faugeras, O. Straight lines have to be straight. Mach. Vis. Appl. 2001, 13, 14–24. [Google Scholar] [CrossRef]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Park, D.H.; Seo, J.G.; Choi, H.; Kang, E.S. Distortion Center Estimation Technique Using the Fov Model and 2D Patterns. In Proceedings of the International Conference on Image Processing, Computer Vision, and Pattern Recognition (IPCV), Las Vegas, NV, USA, 21–24 July 2014. [Google Scholar]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Liu, Y.C.; Lin, K.Y.; Chen, Y.S. Bird’s-Eye View Vision System for Vehicle Surrounding Monitoring. In Proceedings of the 2nd International Workshop on Robot Vision, Auckland, New Zealand, 18–20 September 2008. [Google Scholar]
- Lin, C.-C.; Wang, M.-S. A vision based top-view transformation model for a vehicle parking assistant. Sensors 2012, 12, 4431–4446. [Google Scholar] [CrossRef] [PubMed]
- Szeliski, R. Image alignment and stitching: A tutorial. Found. Trends Comput. Graph. Vis. 2006, 2, 1–104. [Google Scholar] [CrossRef]
- Weinstein, R. Rfid: A technical overview and its application to the enterprise. IT Prof. 2005, 7, 27–33. [Google Scholar] [CrossRef]
- Zhang, J.; Tian, G.Y.; Marindra, A.M.; Sunny, A.I.; Zhao, A.B. A review of passive rfid tag antenna-based sensors and systems for structural health monitoring applications. Sensors 2017, 17, 265. [Google Scholar] [CrossRef] [PubMed]
- Akers, A.; Gassman, M.; Smith, R. Hydraulic Power System Analysis; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]
- Kim, J.S. Study on the Characteristic Analysis of Bleed-Off Center Valve Type Hydraulic Control System for Compact Construction Machinery. Ph.D. Thesis, Inha University, Incheon, Korea, 2009. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | GPS | Laser | Magnetic Fields | Radar | Ultrasound | Radio Frequency | Video | RFID |
|---|---|---|---|---|---|---|---|---|
| Detection Range | Long | Medium | Short | Short/Medium | Short | Short/Medium | Medium | Short/Medium |
| Accuracy of Data | GPS very much dependent on the environment | High | Low/Medium | Medium | Low/Medium | Low/Medium | Medium | Medium |
| Update Rate | High | High | High | High | High | High | High | High |
| Installation | Low/Medium | Medium | Medium | Low/Medium | Low/Medium | Low/Medium | Low/Medium | Low/Medium |
| Cost | Low/Medium | High | Medium/High | Low/Medium | Low | Low/Medium | Low | Low/Medium |
| Reference | Summary | Detection Technology | Main Function | |||
|---|---|---|---|---|---|---|
| Vision | Alert | Equipment Control | Location | |||
| [18] | Proximity warning system in order to prevent collision accidents in open-pit mines based on GPS, wireless networks, and 3D mapping technologies | GPS (Wireless networks and 3D mapping) | 3D map | Audible and Visual | - | 3D coordinate (PC server) |
| [12] | Proximity detection and alert technology for safe construction equipment operation | Magnetic Field | - | Audible and Visual | - | - |
| [17] | A proximity warning system for surface and underground mining | Magnetic Field | - | Vibrating | - | - |
| [5] | Real-time construction worker and equipment operator proximity safety alert system based on RF technology | Radio Frequency (RF) | - | Audible and Visual | - | - |
| [35] | A radar and camera-based proximity warning system for dump trucks | Radar and Camera | Camera (Front and Rear) | Audible and Visual | - | - |
| [25] | RFID-based monitoring system for prevention of accidents involving heavy equipment, such as excavators, cranes, and trucks | RFID (Wireless networks) | - | Warning Signal | - | Working Area Estimation (PC server) |
| Proposed Technology | Proximity warning and excavator control system for prevention of collision accidents | RFID | Camera (360° around view) | Audible and Visual | Excavator control | |
| Classification | Factors | |
|---|---|---|
| RFID reader | RF power Frequency Antenna | Max 1 W 917.3–920.3 MHz 4 ports (transmitting and receiving) |
| RFID antenna | Size Weight | 295 g 130 by 100 by 20 (mm) |
| Polarization | Hor. (dBiL)/2.7 Ver. (dBiL)/−0.15 RHCP (dBic)/4.4 | |
| RFID tag | Type Size | ISO-18000-6C 100 by 30 (mm) |
| Alarm device | Alert type | LED and audible |
| Conventionally Excavator System | Excavator Control System |
|---|---|
 |  |
| Normal | Hazard |
|---|---|
 |  |
| Swing Control Valve | Travel Control Valve |
|---|---|
 |  |
| Approach Angle (°) | Maximum Range Test | Static Test | Dynamic Test | |||
|---|---|---|---|---|---|---|
| Max. (m) | Mean (m) | Max. | Mean (m) | Max. | Mean (m) | |
| 0 | - | - | - | - | - | - |
| 10 | 4.4 | 4.0 | - | - | - | - |
| 20 | 4.9 | 4.3 | - | - | - | - |
| 30 | 5.3 | 5.0 | 4.3 | 3.9 | 3.7 | 2.8 |
| 40 | 7.0 | 6.8 | 4.6 | 4.1 | 4.0 | 3.5 |
| 50 | 8.1 | 7.7 | 5.2 | 4.8 | 4.7 | 4.1 |
| 60 | 8.5 | 8.2 | 5.2 | 4.7 | 4.9 | 4.1 |
| 70 | 8.9 | 8.7 | 6.4 | 5.9 | 5.0 | 4.3 |
| 80 | 9.2 | 8.9 | 6.5 | 5.9 | 5.2 | 4.7 |
| 90 | 9.1 | 8.9 | 6.3 | 5.7 | 4.9 | 4.2 |
| 100 | 9.2 | 8.9 | 6.4 | 5.9 | 5.1 | 4.5 |
| 110 | 8.9 | 8.6 | 6.4 | 5.8 | 4.9 | 4.1 |
| 120 | 8.7 | 8.5 | 6.5 | 5.8 | 5.1 | 4.4 |
| 130 | 8.6 | 8.3 | 6.3 | 5.6 | 5.0 | 4.4 |
| 140 | 8.1 | 7.9 | 5.3 | 4.8 | 4.5 | 3.7 |
| 150 | 7.3 | 7.0 | 4.4 | 4.0 | 3.6 | 2.9 |
| 160 | 4.7 | 4.2 | - | - | - | - |
| 170 | 4.0 | 3.6 | - | - | - | - |
| 180 | - | - | - | - | - | - |
| Distance | Static Test | Dynamic Test | Swing Test | |||
|---|---|---|---|---|---|---|
| False Positives | False Negatives | False Positives | False Negatives | False Positives | False Negatives | |
| 3 m | 0 | 0 | 0 | 0 | 0 | 0 |
| 4 m | 0 | 0 | 0 | 2 | 0 | 7 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jo, B.-W.; Lee, Y.-S.; Kim, J.-H.; Kim, D.-K.; Choi, P.-H. Proximity Warning and Excavator Control System for Prevention of Collision Accidents. Sustainability 2017, 9, 1488. https://doi.org/10.3390/su9081488
Jo B-W, Lee Y-S, Kim J-H, Kim D-K, Choi P-H. Proximity Warning and Excavator Control System for Prevention of Collision Accidents. Sustainability. 2017; 9(8):1488. https://doi.org/10.3390/su9081488
Chicago/Turabian StyleJo, Byung-Wan, Yun-Sung Lee, Jung-Hoon Kim, Do-Keun Kim, and Pyung-Ho Choi. 2017. "Proximity Warning and Excavator Control System for Prevention of Collision Accidents" Sustainability 9, no. 8: 1488. https://doi.org/10.3390/su9081488
APA StyleJo, B.-W., Lee, Y.-S., Kim, J.-H., Kim, D.-K., & Choi, P.-H. (2017). Proximity Warning and Excavator Control System for Prevention of Collision Accidents. Sustainability, 9(8), 1488. https://doi.org/10.3390/su9081488