In this section, the proposed multivariable control methodologies for the lab-scale wind turbine are described. A robust control methodology based on the H∞ mixed sensitivity problem and three decoupling methodologies are developed. Concretely, the decoupling techniques are dynamic simplified decoupling, static simplified decoupling and inverted decoupling.
3.1. Decoupling Control
There are two approaches for multivariable control: a pure centralized strategy or a decoupling network combined with a diagonal decentralized controller [
21,
29]. This work considers the second approach where the control system is designed by combining a diagonal controller
C(
s) with a block compensator
D(
s) in such a way that the controller sees the apparent process
Q(
s) =
G(
s)∙
D(
s) as a set of completely independent processes, that is,
Q(
s) is diagonal or diagonally dominant. The essence of decoupling is the imposition of a calculation net that cancels the process interactions, allowing independent control of the loops [
20,
30]. Some decoupling schemes are static [
31] and other are dynamic [
29,
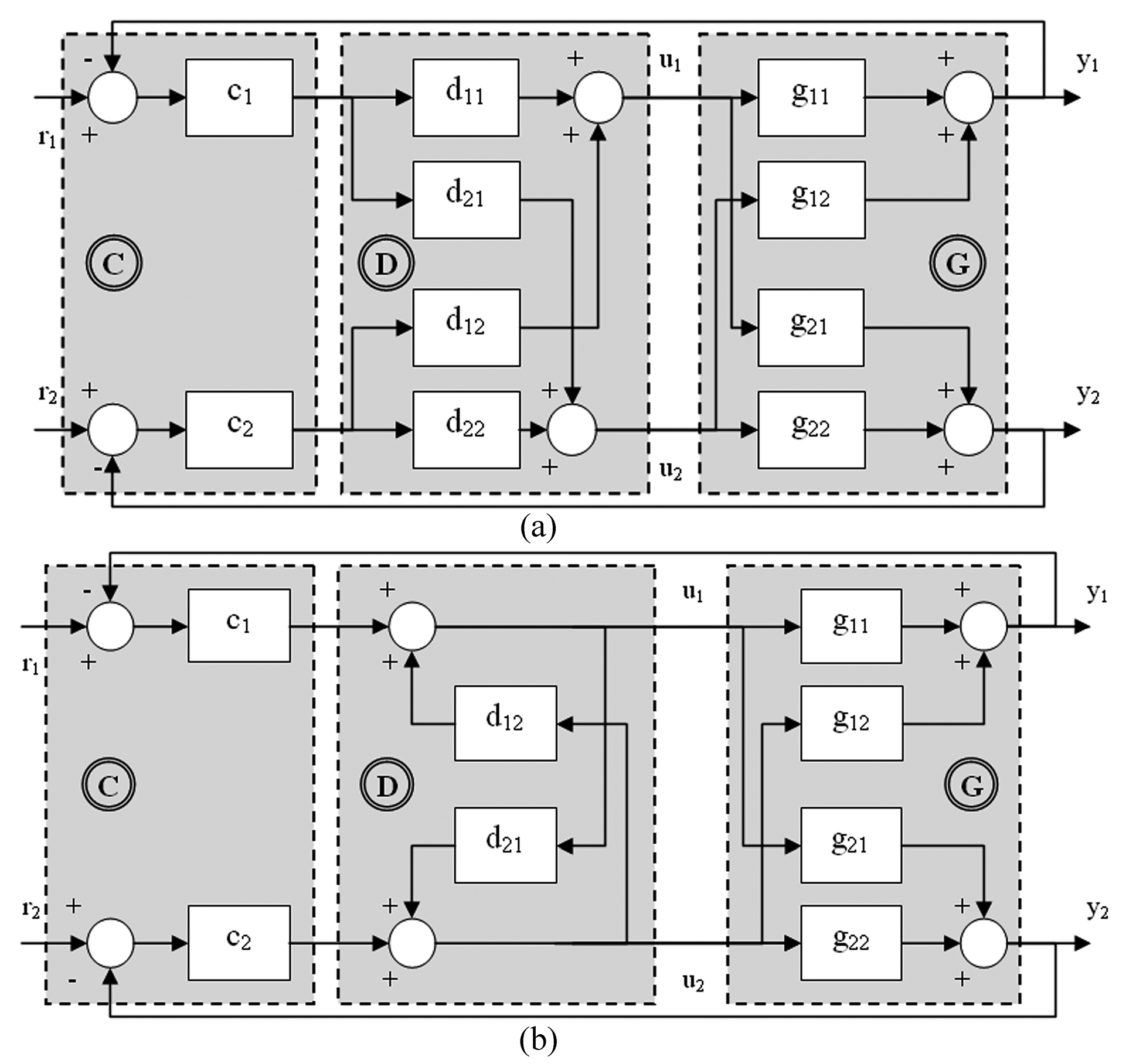
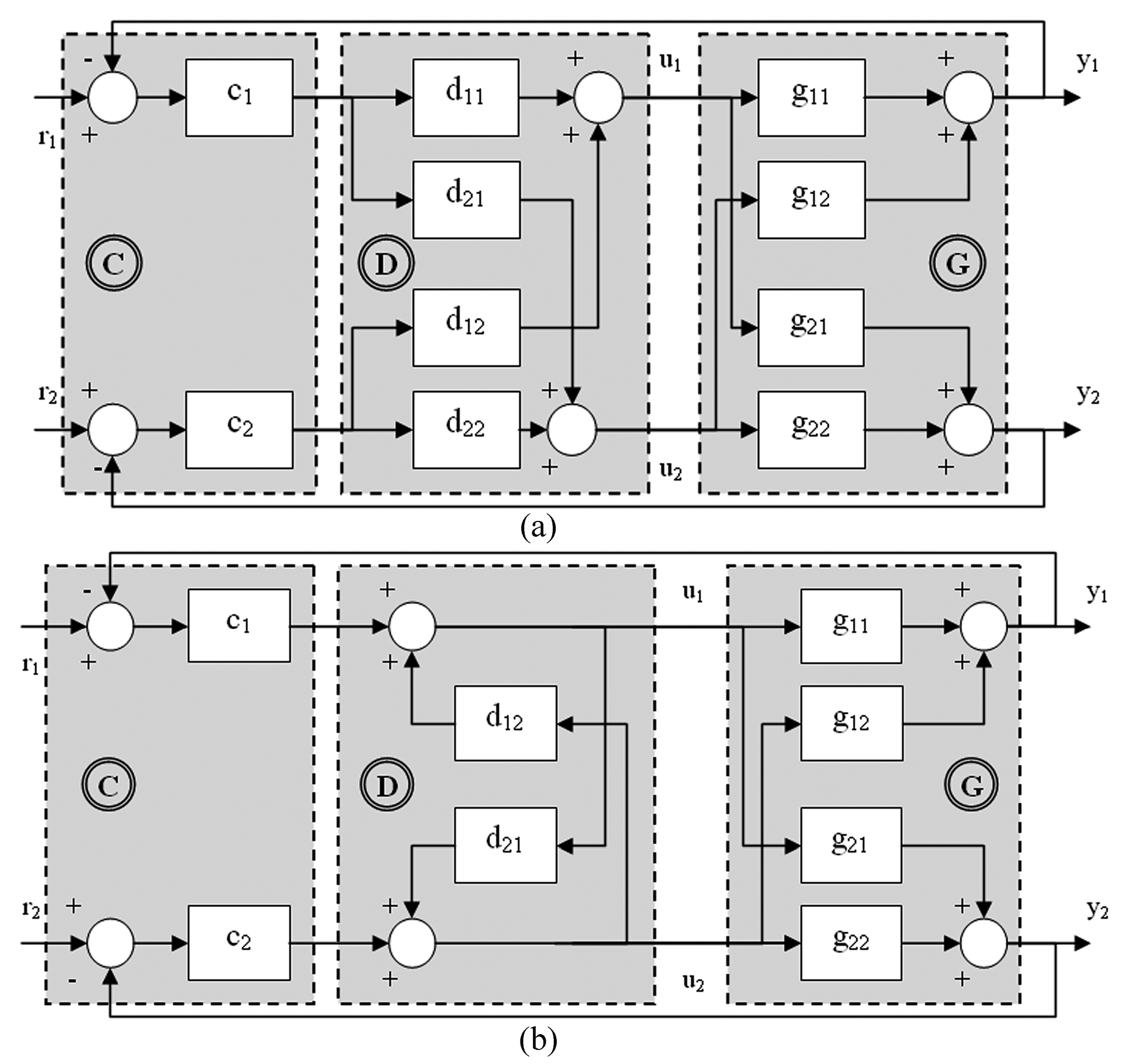
32]. Most decoupling methods use a conventional decoupling scheme in which the process inputs are derived by a time-weighted combination of feedback controller outputs (see
Figure 7a). For an
n ×
n process, the decoupling network is designed from Equation (7), normally specifying
n elements of
D(
s) or the
n desired transfer functions of the apparent process
Q(
s).
The most common schemes of conventional decoupling are ideal and simplified decoupling [
30]. The expressions for ideal and simplified decoupling and their corresponding apparent processes are collected in
Table 4. In ideal decoupling, the apparent processes are made as simple as the diagonal elements of the process matrix
G(
s). However, the resulting decoupling elements are complex and usually have realizability problems. On the other hand, simplified decoupling fixes the diagonal elements of
D(
s) to the unity and the other two elements result easy to design and implement. However, the complexity moves to the apparent processes of
Q(
s) [
20].
An alternative scheme of decoupling derives a process input as a time-weighted combination of one feedback controller output and the other process inputs. This is called inverted decoupling (see
Figure 7b). Using this structure, it is possible to obtain an apparent process
Q(
s) as simple as that of ideal decoupling while using the low order decoupling elements of simplified decoupling [
33]. In addition, it also has important advantages from a practical point of view [
34].
In this study, the following three decoupling schemes are designed for the lab-scale wind turbine at the transition load operation mode: simplified decoupling (dynamic and static), and inverted decoupling. The resultant decoupling elements are shown in
Table 5.
Static simplified decoupling is a version of simplified decoupling that only decouples the process at the stationary state. The decoupler is only calculated with the information of the steady state gain of the process according to Equation (8). The expression of the corresponding apparent process is shown in Equation (9), where non-perfect decoupling is achieved because the off-diagonal elements of Q(s) are non-zero.
Decentralized Controller
Once the decoupling network is designed, two controllers of the decentralized control
C(
s) must be tuned for the apparent processes of
Q(
s). When perfect decoupling is achieved, the parameters of the diagonal controllers can be tuned independently for the corresponding apparent process elements
qi(
s), in the same way that single-input single-output (SISO) systems are tuned. For the dynamic simplified decoupling and inverted decoupling, the existing SISO tuning methods can be directly applied to guarantee the stability and performance of each loop. In the case of non-perfect decoupling, such as static simplified decoupling, the remaining interaction must be considered. For the case of dynamic simplified and inverted decupling, the two PI controllers of
C(
s) are tuned according to the methodology proposed in [
35]. The iterative procedure of [
36] is used for the static simplified case. In any case, the controllers of
C(
s) have been tuned to achieve almost the same closed-loop settling time, around 200 s, in both loops. The design frequency range was limited between 10
−5 rad/s and 1 rad/s.
3.2. The H∞ Mixed Sensitivity Problem and Robust Controller Synthesis
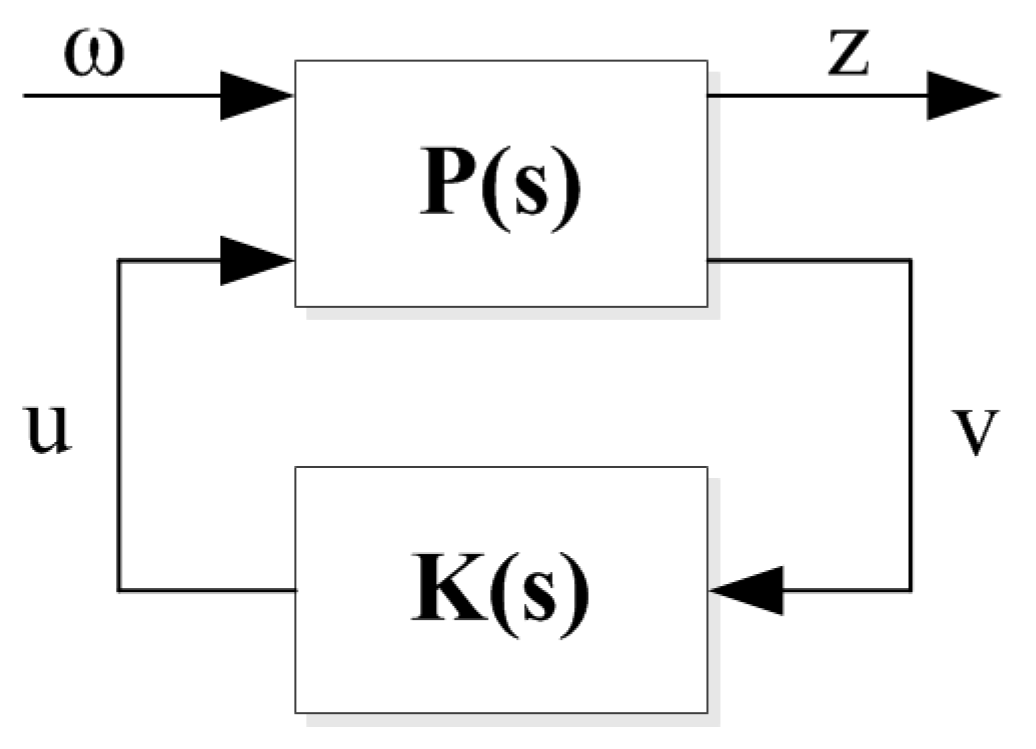
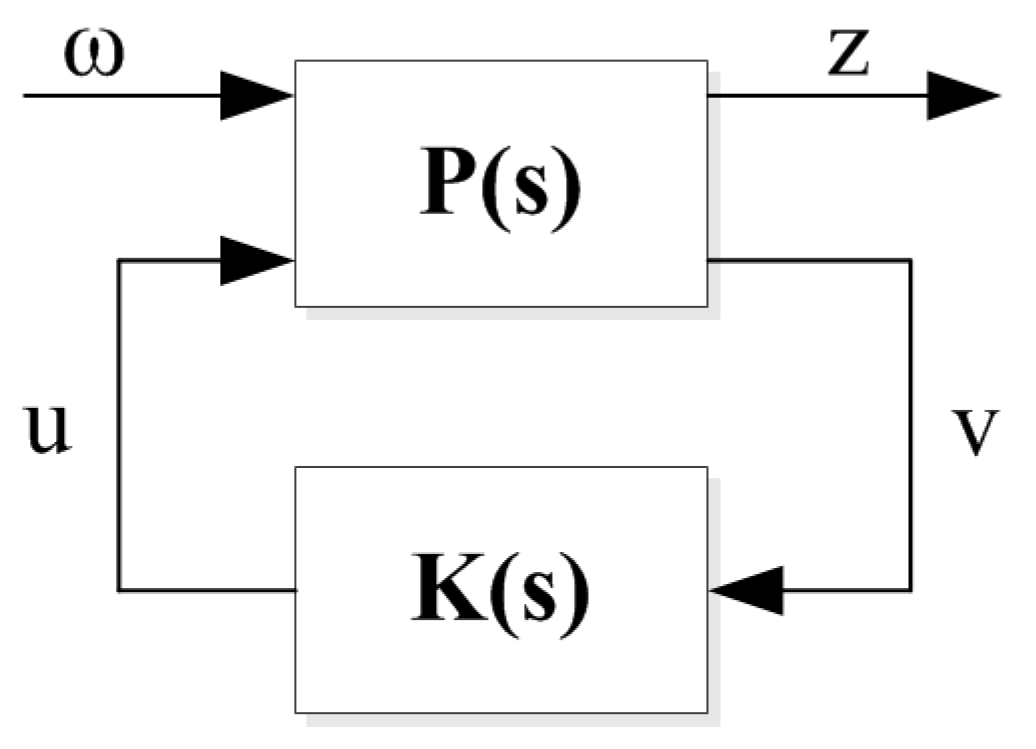
The multivariable robust controller design can be formulated as an H
∞ optimization problem based on scheme shown in
Figure 8 [
21,
37]. In this scheme,
P(
s) is the generalized plant,
K(
s) is the controller,
v the measured variables,
u are the control signals,
ω are the exogenous signals and
z are the error variables.
The controller synthesis is performed according to the systematic design procedure proposed in [
37,
38]. The optimal H
∞ control problem is still unsolved; nevertheless, there are solutions for the suboptimal problem. According to
Figure 8, the control problem consists of computing a controller which minimizes the ratio
γ between the energy of error variables
z and the energy of the exogenous signal vector
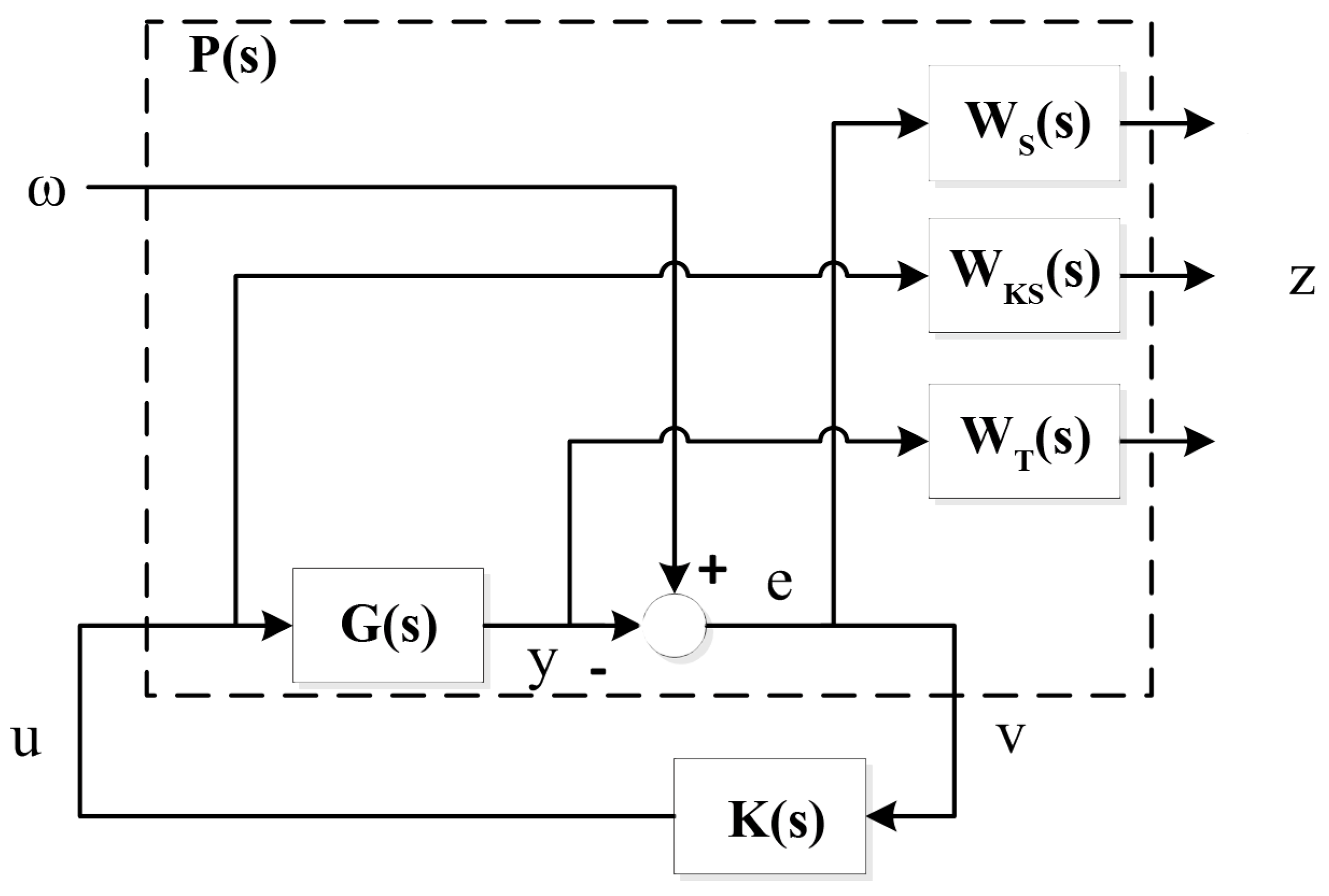
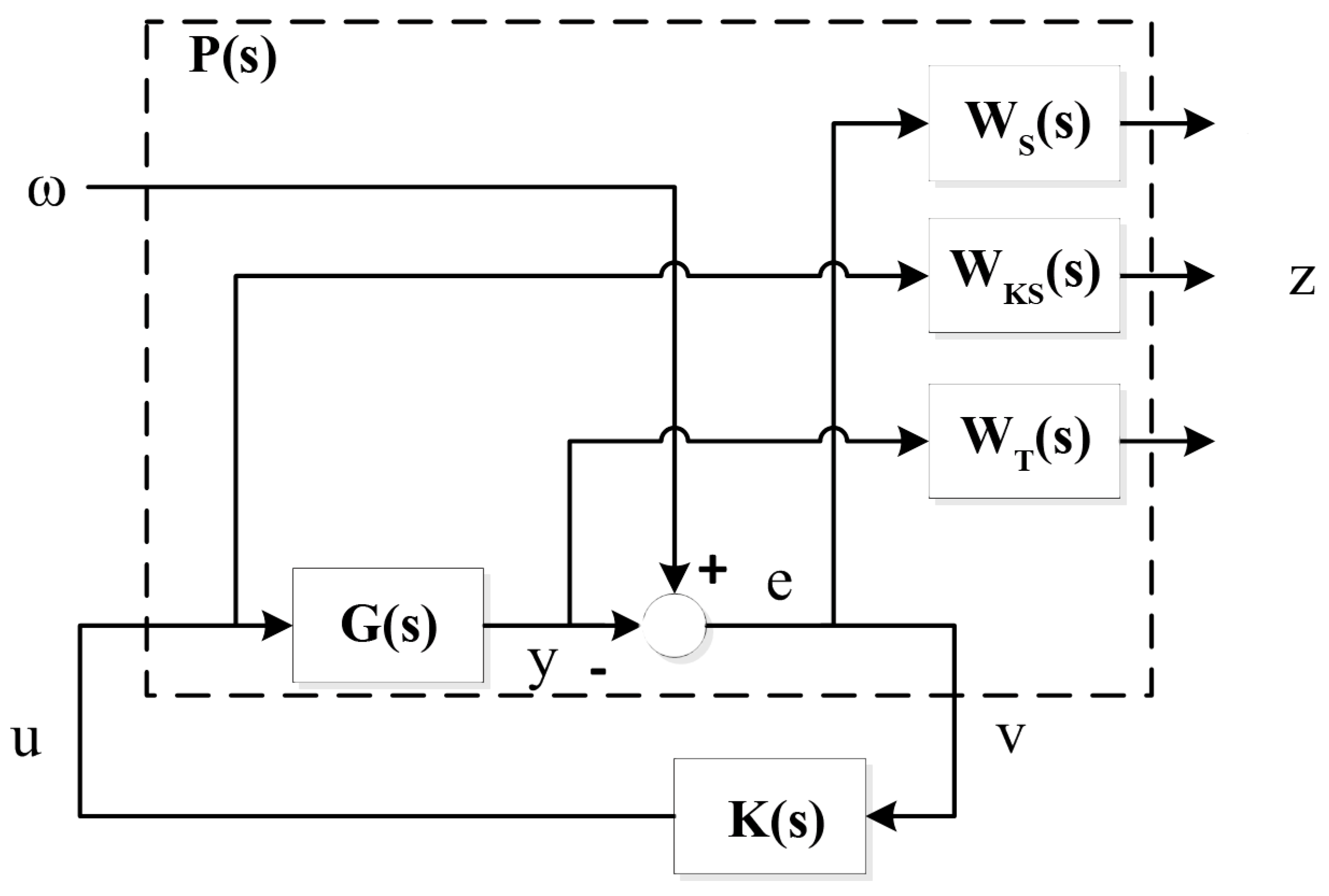
ω. The scheme shown in
Figure 9 allows performing the S/KS/T mixed sensitivity problem for developing the generalized plant [
21,
37]. In this case, the closed loop transfer matrix
Tzω(
s) is given as follows:
where
So(
s) is the output sensitivity transfer matrix,
To(
s) is the output complementary sensitivity transfer matrix, and
K(
s)·
So(
s) is the control sensitivity transfer matrix. The matrices
WS(
s),
WT(
s) and
WKS(
s) are the corresponding weighting matrices to specify the relevant frequency range for
Tzω(
s). The choice of these matrices can be carried out by means of design rules.
Next, the design procedure is summarized detailing the different steps [
37]. First, the nominal model must be scaled, which is necessary to estimate the multiplicative output uncertainty for the non-nominal models. This multiplicative output uncertainty affects the robust stability (RS) of the system changing the
To(
s) shape. A proper shape of
To(
s) is desirable for good reference tracking and noise attenuation. The nominal model can be scaled as follows:
where
G(
s) is the original nominal linear model and
De and
Du are the scaling matrices.
After obtaining the scaled nominal model, the multiplicative output uncertainty can be estimated according to Equation (12):
where
represents the different scaled non-nominal identified models at each operation point.
Next, the matrix
WT(
s) is defined as a square diagonal matrix as follows:
where
wTdiag(
s) is a transfer function which must be stable, minimum phase, with high gain at high frequencies and with magnitude greater than the maximum singular value of the uncertainty computed by Equation (12) for each non-nominal model. The matrix
WS(
s) is designed as the diagonal matrix in Equation (14). Each diagonal element
wsi(
s) is described according to Equation (15), where
ωT is the crossover frequency of
wTdiag(
s), and
αi and
βi are the gains at high and low frequencies, respectively. The tuning parameter
ki modifies the speed of the output response. This parameter is usually chosen heuristically by trial and error method. The matrix
WKS(
s) is usually specified as the identity matrix to avoid numerical problems in the synthesis algorithm.
Finally, after defining the weighting matrices, the controller
(
s) is synthesized by using computational software. It is important to remember that the obtained controller is calculated with the scaled plant, so it is necessary to rebuild it as follows:
For the proposed work, the identified model of the lab-scale wind turbine at wind speed of 8 m/s is used as the nominal model. The scaling matrices are given by Equation (17) and wTdiag(s) has been selected as it is shown in Equation (18).
In the
WS(
s) matrix,
ωT is about 0.0294 rad/s and according to the design process in [
37],
α1 =
α2 = 0.5 and
β1 =
β2 = 10
−4 have been selected. Parameters
k1 = 0.15 and
k2 = 1.1 have been chosen to achieve similar time responses than those obtained by the previous designs of decoupling methodologies.
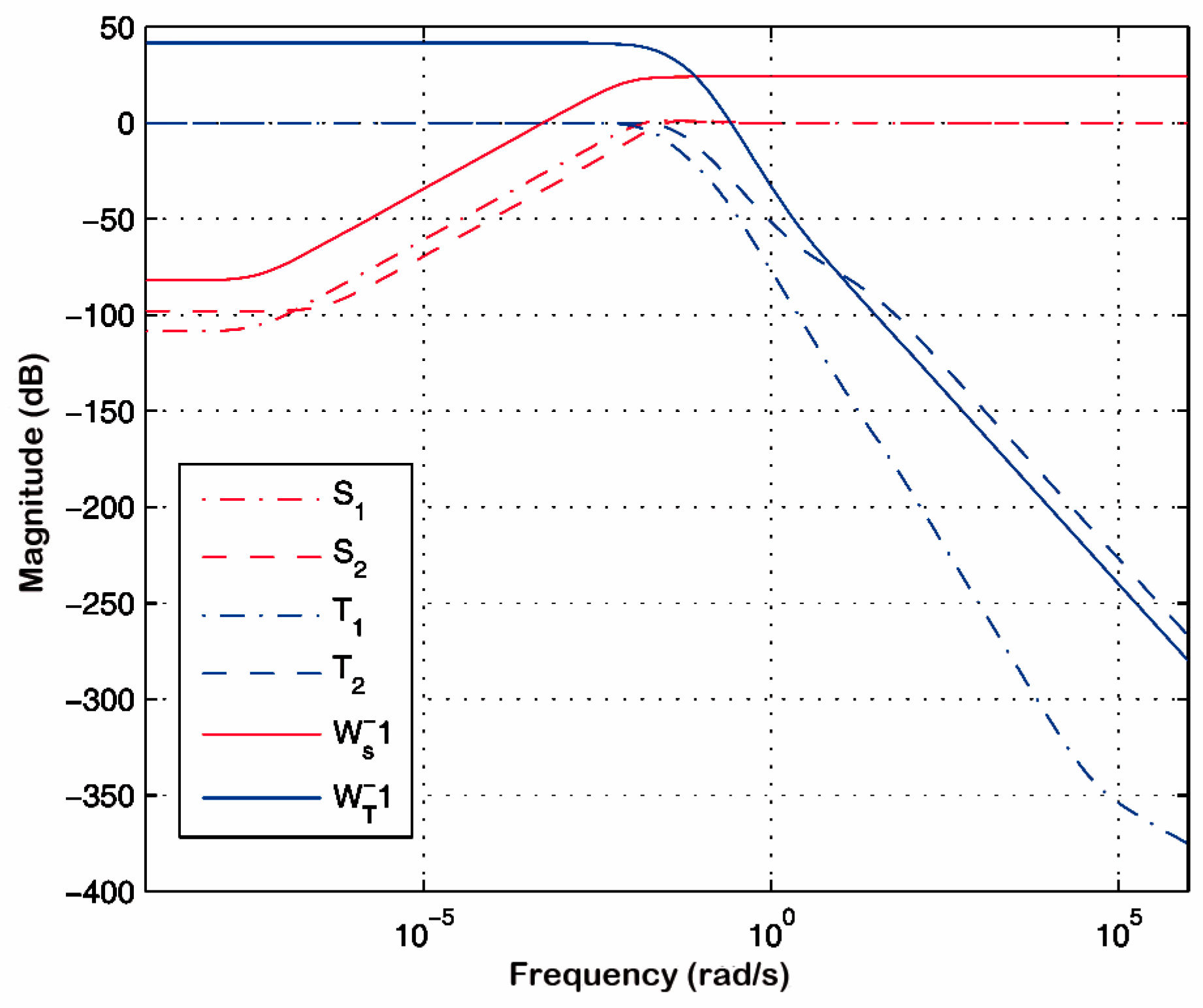
The H
∞ controller has a ratio γ equal to 7.95. Considering this fact, and according to the condition in Equation (19), this value does not guarantee robust stability. Thus, it is necessary to verify that the sensitivity transfer function and complementary sensitivity transfer functions do not exceed the upper bounded values in the entire range of frequencies [
37,
38].
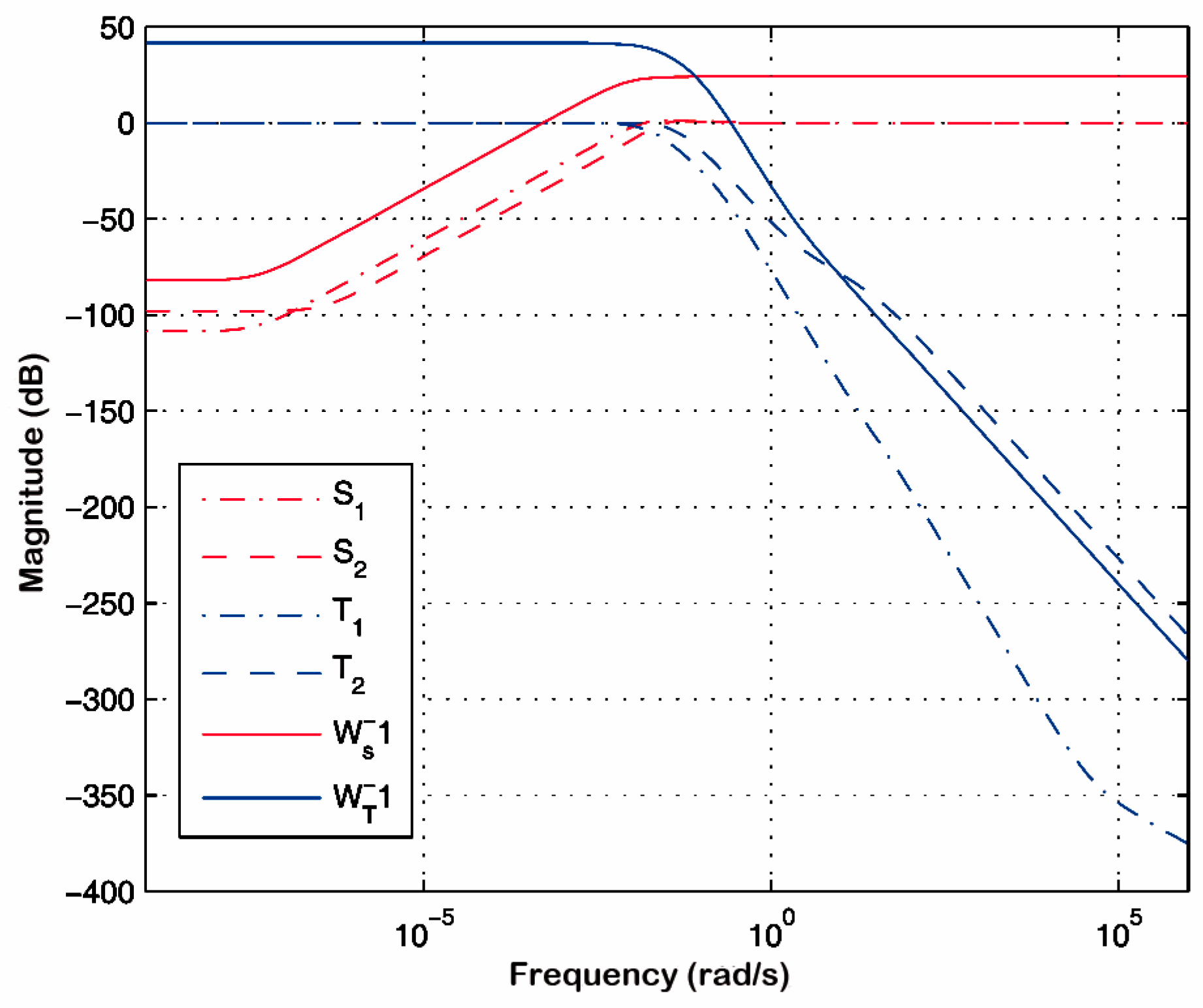
Figure 10 shows the magnitude of the maximum singular value of the diagonal elements of
So(
s) and
To(
s), together with the bounded values
and
. It is observed that the maximum singular values of the diagonal elements of the output sensitivity transfer matrix are below of bounded value in the entire frequency range. However, the maximum singular values of the first element of the output complementary sensitivity transfer matrix are above the bounded values at high frequencies.
Usually, the controller
K(
s) obtained by this procedure has elements with too high order to be implemented. Therefore, the controller is generally reduced e.g., studying the Hankel singular values [
39]. Equation (20) shows the second order reduced robust controller matrix.
3.3. Robust Stability Analysis of the Designed Controllers
Next, a robustness evaluation of the proposed decoupling strategies and H
∞ controller is performed by means of a
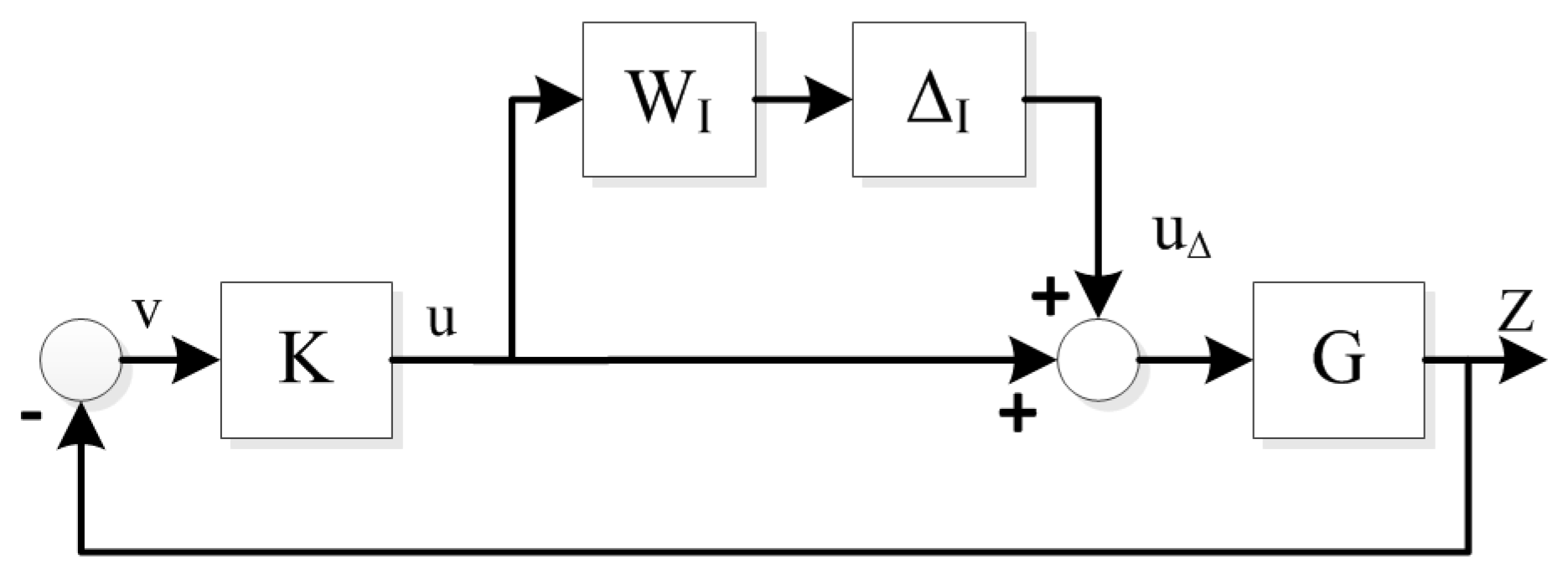
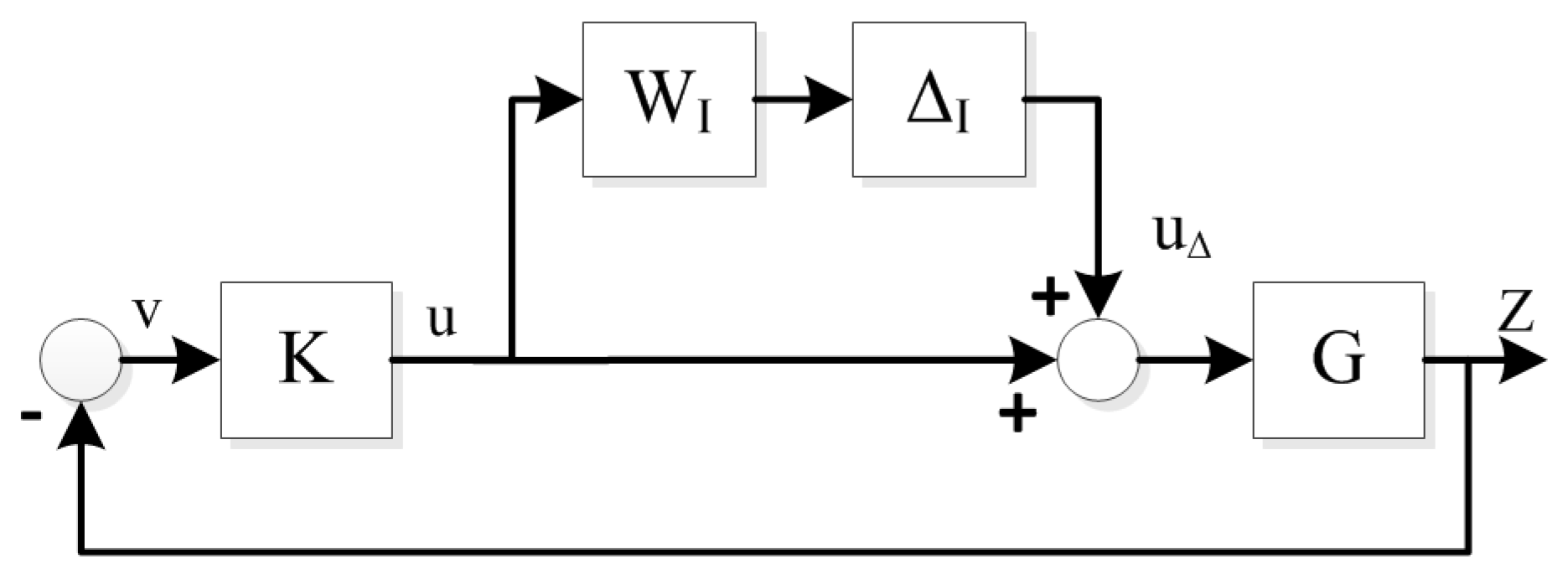
μ-analysis in the presence of diagonal multiplicative input uncertainty. The multiplicative input uncertainty is one of the most difficult to treat in multivariable systems. It is represented as illustrated in
Figure 11, where
∆I(
s) is the disturbance, and
WI(
s) is the diagonal uncertainty weight.
The selected weight is given by Equation (21), which can be interpreted as the process inputs increase by up to 150% uncertainty at high frequencies and by almost 15% at low frequencies.
To achieve robust stability (RS), the necessary and sufficient condition [
21] is:
where
μ is the structured singular value (SSV) and
TI(
s) =
K(
s)
G(s)(
I +
K(
s)
G(
s))
−1 is the input complementary sensitivity function.
K(
s) is the full centralized control, which is compound of the product
D(
s)∙
C(
s) for the case of the proposed decoupling methods.
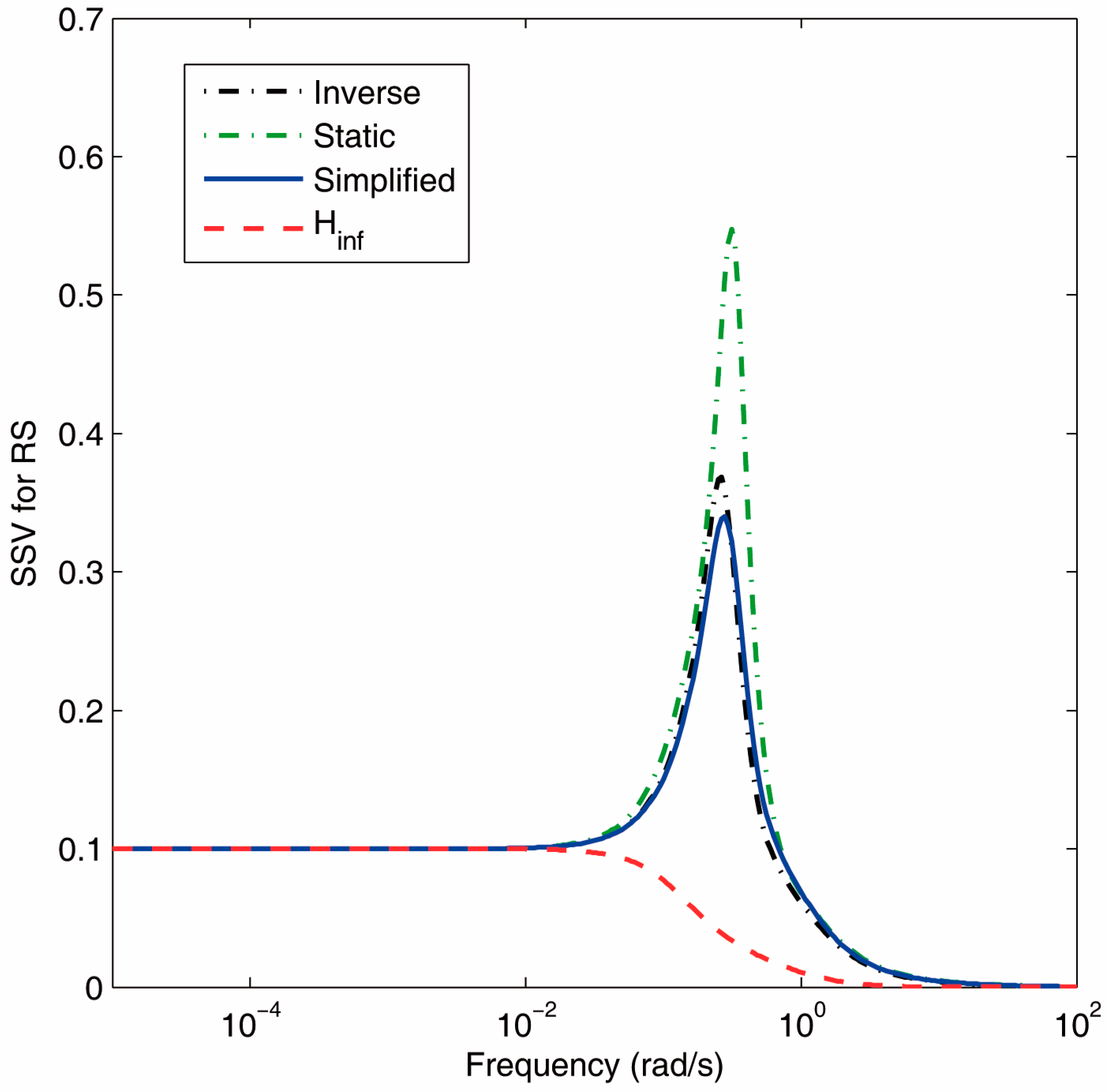
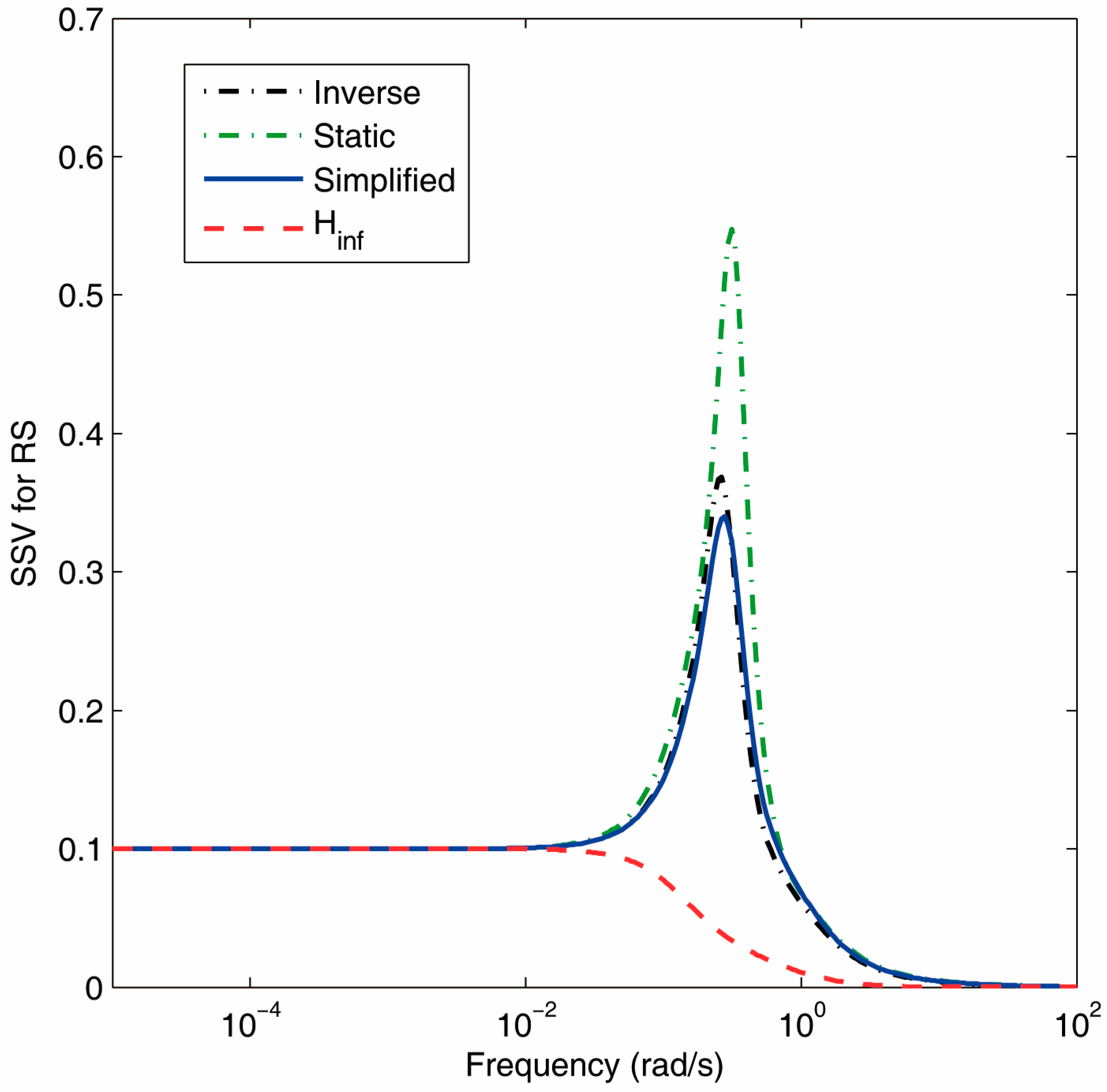
Figure 12 shows the SSV for RS of the different designed controllers. It is observed that the robust control presents the better RS for the entire frequency range, as was expected. Nevertheless, the decoupling strategies fulfill the condition in Equation (28) for all frequencies, which indicates that the system will remain stable despite the process input uncertainty.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}