
Field Evaluation of the Nutrient Removal Performance of a Gross Pollutant Trap (GPT) in Australia



Abstract
:
1. Introduction
2. Methodology
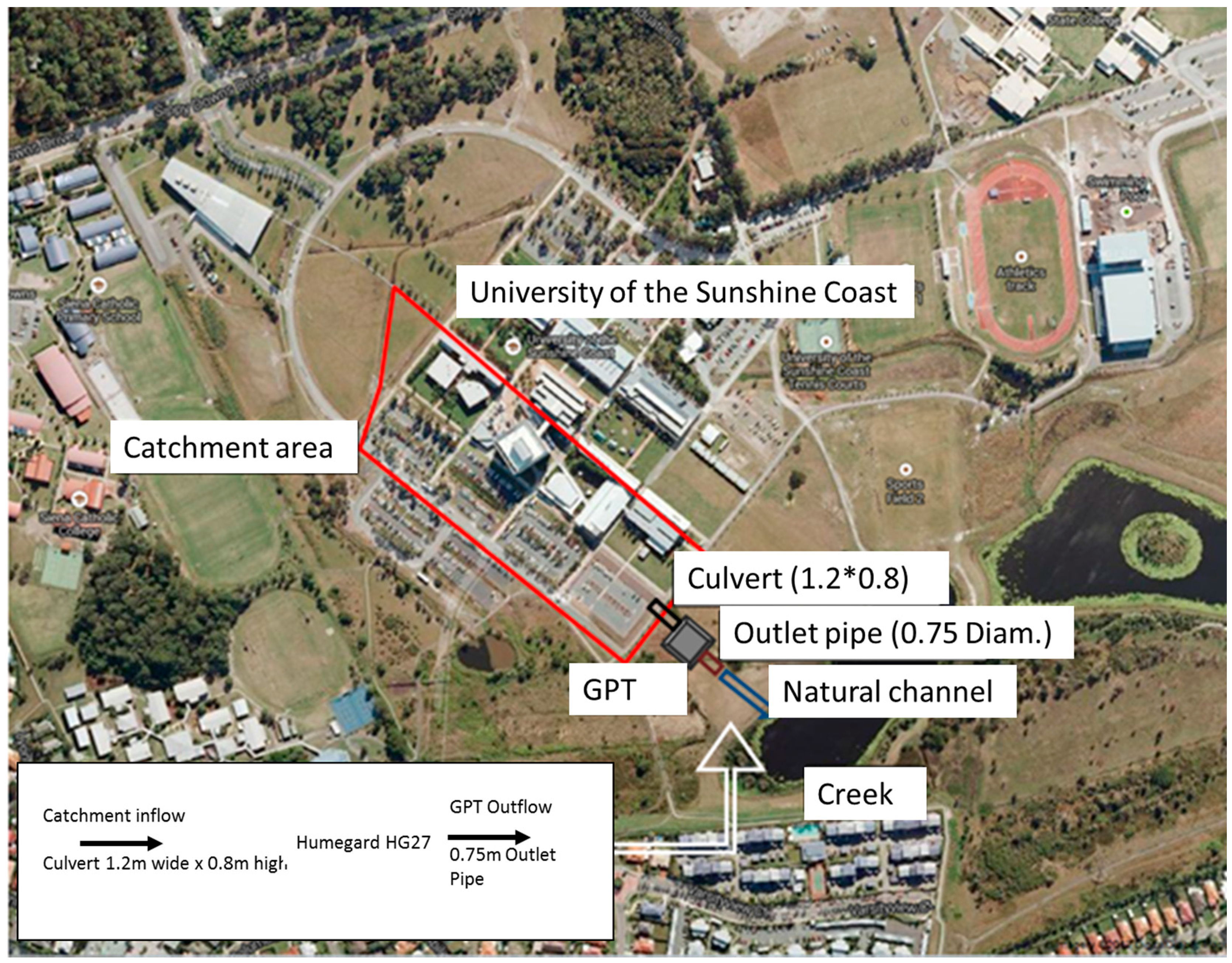
2.1. Pollutant Trap Description
2.2. Catchment Characteristics
2.3. Sampling Protocol
2.4. Performance Metrics
- Vi = Volume of flow during period i
- Ci = Concentration associated with period i
- n = Total number of aliquots collected during event
3. Results and Discussion
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Dietz, M.E. Low Impact Development Practices: A Review of Current Research and Recommendations for Future Directions. Water Air Soil Pollut. 2007, 186, 351–363. [Google Scholar] [CrossRef]
- Lucke, T.; Beecham, S. Field Investigation of Clogging in a Permeable Pavement System. J. Build. Res. Inf. 2011, 39, 603–615. [Google Scholar] [CrossRef]
- Hossain, I.; Imteaz, M.A.; Hossain, M.I. Continuous Simulation of Suspended Sediment through a Stream Section. Int. J. Water 2013, 7, 206–222. [Google Scholar] [CrossRef]
- Nichols, P.W.B.; White, R.; Lucke, T. Do sediment type and test durations affect results of laboratory-based, accelerated testing studies of permeable pavement clogging? Sci. Total Environ. 2015, 511, 786–791. [Google Scholar] [CrossRef] [PubMed]
- Taylor, A.C.; Wong, T.H.F. Non-Structural Stormwater Quality: Best Management Practices: A Literature Review of Their Value and Life-Cycle Costs; CRC for Catchment Hydrology: Melbourne, Australia, 2002. [Google Scholar]
- Davis, A. Field Performance of Bioretention: Hydrology Impacts. J. Hydrol. Eng. 2008, 13, 90–95. [Google Scholar] [CrossRef]
- Hipp, J.A.; Ogunseitan, O.; Lejano, R.; Smith, C.S. Optimization of stormwater filtration at the urban/watershed interface. Environ. Sci. Technol. 2006, 40, 4794–4801. [Google Scholar] [CrossRef] [PubMed]
- Sample, D.J.; Grizzard, T.J.; Sansalone, J.; Davis, A.P.; Roseen, R.M.; Walker, J. Assessing performance of manufactured treatment devices for the removal of phosphorus from urban stormwater. J. Environ. Manag. 2012, 113, 279–291. [Google Scholar] [CrossRef] [PubMed]
- Arbor, A. Environmental Verification Technology Report: Stormwater Source Area Treatment Device: Baysaver Technologies, Inc.—Baysaver Separation System, Model 10K; Report No. 05/21/WQPC-WWFI; U.S. Environmental Protection Agency: Washington, DC, USA, 2005.
- Al-Hamdan, A.Z.; Nnadi, F.N.; Romah, M.S. Performance reconnaissance of stormwater proprietary best management practices. J. Environ. Sci. Health A Toxic Hazard Subst. Environ. Eng. 2007, 42, 427–437. [Google Scholar] [CrossRef] [PubMed]
- Roesner, L.A.; Pruden, A.; Kidder, E.M. Improved Protocol for Classification and Analysis of Stormwater-Borne Solids; Water Environment Research Foundation: Alexandria, VA, USA, 2007. [Google Scholar]
- Allison, R.; Pezzaniti, D. Gross Pollutant and Sediment Traps, in Australian Runoff Quality—A Guide to Water Sensitive Urban Design; Wong, T.H.F., Ed.; Institution of Engineers: Barton, Australia, 2006. [Google Scholar]
- Humes Stormwater Solutions, 2016. HumeGard® GPT Technical Manual. Available online: http://www.humes.com.au/uploads/HUMES/HumeGard_technical_manual_Issue_3_March_2015.pdf (accessed on 12 July 2016).
- Phillips, D.L. Technical Report on the In-Line Litter Separator Installation and Monitoring Project; EcoRecycle Victoria and Swinburne University of Technology: Melbourne, Australia, 1998. [Google Scholar]
- Bureau of Meteorology Queensland Weather and Warnings, 2016. Available online: http://www.bom.gov.au (accessed on 21 March 2016).
- Wong, G. Proprietary Devices Evaluation Protocol (PDEP) for Stormwater Quality Treatment Devices, Version 3; Auckland Regional Council: Auckland, New Zealand, 2012.
- Strecker, E.W.; Quigley, M.M.; Urbonas, B.R.; Jones, J.E.; Clary, J.K. Determining urban storm water BMP effectiveness. J. Water Resour. Plann. Manag. 2001, 127, 144–149. [Google Scholar] [CrossRef]
- McNett, J.K.; Hunt, W.F.; Osborne, J.A. Establishing storm-water BMP evaluation metrics based upon ambient water quality associated with benthic macroinvertebrate populations. J. Environ. Eng. 2010, 136, 535–541. [Google Scholar] [CrossRef]
- Lenhart, H.A.; Hunt, W.F. Evaluating four storm-water performance metrics with a North Carolina Coastal Plain storm-water wetland. J. Environ. Eng. 2011, 137, 155–162. [Google Scholar] [CrossRef]
- Nichols, P.; Lucke, T.; Drapper, D.; Walker, C. Performance Evaluation of a Floating Treatment Wetland in an Urban Catchment. Water 2016. [Google Scholar] [CrossRef]
- Winston, R.J.; Hunt, W.F.; Kennedy, S.G.; Merriman, L.S.; Chandler, J.; Brown, D. Evaluation of floating treatment wetlands as retrofits to existing stormwater retention ponds. Ecol. Eng. 2013, 54, 254–265. [Google Scholar] [CrossRef]
- Borne, K.; Fassman-Beck, E.; Winston, R.; Hunt, W.; Tanner, C. Implementation and Maintenance of Floating Treatment Wetlands for Urban Stormwater Management. J. Environ. Eng. 2015, 141, 04015030. [Google Scholar] [CrossRef]
- Borne, K.E. Floating treatment wetland influences on the fate and removal performance of phosphorus in stormwater retention ponds. Ecol. Eng. 2014, 69, 76–82. [Google Scholar] [CrossRef]
- State of Queensland. State Planning Policy; Department of State Development, Infrastructure and Planning, State of Queensland: Brisbane, Australia, 2014.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Requirements | Criteria | Details |
|---|---|---|
| Minimum Qualifying Events | 15 | [16] |
| Minimum Rainfall Intensity | 2 mm in 30 min | Pluviometer (0.2 mm increments) TB3-Hydrological Services |
| Minimum Storm Duration | 15 min | Necessary to achieve 8 aliquots. |
| Minimum Antecedent Period | 24 h | [16] |
| Minimum number and volume of sample aliquots | 8 at 200 mL | Composite sample minimum volume 1.6 L |
| Sample method | ISCO GLS Auto-samplers | Collected within 4 h of storm end. |
| Time-weighted samples | Every 10 min | Starflow ultrasonic probes at pipe outlet |
| Total Suspended Solids (TSS) | APHA (2005) 2540 D | HDPE or glass bottles, Cool to 4 °C, maximum hold time 24 h |
| Total Nitrogen & TKN | APHA (2005) 4500 N | HDPE or glass bottles, Cool to 4 °C, collect ASAP, maximum hold time 48 h |
| Total Phosphorous & Orthophosphate | APHA (2005) 4500 P | HDPE or glass bottles, Cool to 4 °C, collect as soon as possible, maximum hold time 48 h |
| Laboratory Certification | NATA registered for all parameters except PSD | |
| Quality Assurance/Quality Control | Random duplicates and blanks in accordance with relevant Australian Standards |
| Sample | Date | Rainfall Depth (mm) | TSS in (mg/L) | TSS out (mg/L) | TSS % Removal | TN in (mg/L) | TN out (mg/L) | TN % Removal | TP in (mg/L) | TP out (mg/L) | TP % Removal |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Limit of Detection (LoD) | 1 | 0.1 | 0.005 | ||||||||
| 1 | 12 June 2013 | 80 | 247 | 28 | 88.7 | 0.846 | 0.543 | 35.8 | 0.167 | 0.081 | 51.5 |
| 2 | 17 November 2013 | 42 | 300 | 280 | 6.7 | 0.647 | 0.661 | −2.2 | 0.056 | 0.062 | −10.7 |
| 3 | 18 November 2013 | 9 | 233 | 113 | 51.5 | 0.772 | 0.688 | 10.9 | 0.256 | 0.243 | 5.1 |
| 4 | 24 November 2013 | 17 | 21 | 16 | 23.8 | 0.881 | 0.640 | 27.4 | 0.196 | 0.146 | 25.5 |
| 5 | 30 November 2013 | 15 | 32 | 23 | 28.1 | 0.570 | 0.593 | −4.0 | 0.074 | 0.055 | 25.7 |
| 6 | 11 December 2013 | 14 | 19 | 14 | 26.3 | 1.089 | 1.068 | 1.9 | 0.072 | 0.070 | 2.8 |
| 7 | 6 January 2014 | 21 | 55 | 40 | 27.3 | 0.432 | 0.398 | 7.9 | 0.094 | 0.081 | 13.8 |
| 8 | 8 January 2014 | 1 | 27 | 8 | 70.4 | 2.052 | 1.365 | 33.5 | 0.971 | 0.320 | 67.0 |
| 9 | 16 January 2014 | 6 | 67 | 10 | 85.1 | 0.525 | 0.385 | 26.7 | 0.185 | 0.078 | 57.8 |
| 10 | 22 February 2014 | 10 | 28 | 20 | 28.6 | 1.096 | 0.709 | 35.3 | 0.149 | 0.090 | 39.6 |
| 11 | 24 February 2014 | 10 | 70 | 35 | 50.0 | 2.068 | 0.826 | 60.1 | 1.613 | 0.609 | 62.2 |
| 12 | 5 March 2014 | 14 | 45 | 14 | 68.9 | 0.676 | 0.342 | 49.4 | 0.418 | 0.156 | 62.7 |
| 13 | 18 March 2014 | 9 | 208 | 156 | 25.0 | 0.866 | 0.459 | 47.0 | 0.295 | 0.169 | 42.7 |
| 14 | 25 March 2014 | 32 | 121 | 114 | 5.8 | 0.968 | 0.995 | −2.8 | 0.217 | 0.047 | 78.3 |
| 15 | 27 March 2014 | 130 | 38 | 28 | 26.3 | 0.911 | 0.640 | 29.8 | 0.542 | 0.636 | −17.3 |
| TSS | TN | TP | |
|---|---|---|---|
| Mean difference | 0.294 | 0.226 | 0.1341 |
| T value | 4.01 | 4.03 | 4.12 |
| p-value | 0.001 * | 0.001 * | 0.001 * |
| alpha | 0.05 | 0.05 | 0.05 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nichols, P.; Lucke, T. Field Evaluation of the Nutrient Removal Performance of a Gross Pollutant Trap (GPT) in Australia. Sustainability 2016, 8, 669. https://doi.org/10.3390/su8070669
Nichols P, Lucke T. Field Evaluation of the Nutrient Removal Performance of a Gross Pollutant Trap (GPT) in Australia. Sustainability. 2016; 8(7):669. https://doi.org/10.3390/su8070669
Chicago/Turabian StyleNichols, Peter, and Terry Lucke. 2016. "Field Evaluation of the Nutrient Removal Performance of a Gross Pollutant Trap (GPT) in Australia" Sustainability 8, no. 7: 669. https://doi.org/10.3390/su8070669
APA StyleNichols, P., & Lucke, T. (2016). Field Evaluation of the Nutrient Removal Performance of a Gross Pollutant Trap (GPT) in Australia. Sustainability, 8(7), 669. https://doi.org/10.3390/su8070669