
A Linear Model for the Estimation of Fuel Consumption and the Impact Evaluation of Advanced Driving Assistance Systems





Abstract
:1. Introduction
2. Problem Formulation
3. Data Source
3.1. Principal Experiment
Data Reduction
- 4 is the number of cylinders in the engine;
- RPM is rated for two because we have one injection each 2 RPM;
- 1000 is used to switch from mg to g;
- 60 is the number of seconds in one minute; and
- 825 is the density of diesel fuel expressed g/l.
- fuel metering values lower than 8.62 mgi (these values are evident measurement errors, being below the value of consumption observed in engine idling speed);
- instantaneous consumption values higher than 0.12 l/km (these are measurement errors too, being over the maximum value of fuel consumption furnished by the manufacturer);
- speed values lower than 10 km/h (excluding these cuts off the stop-and-go phase, to which our model does not apply).
3.2. Transferability Experiment
4. Results
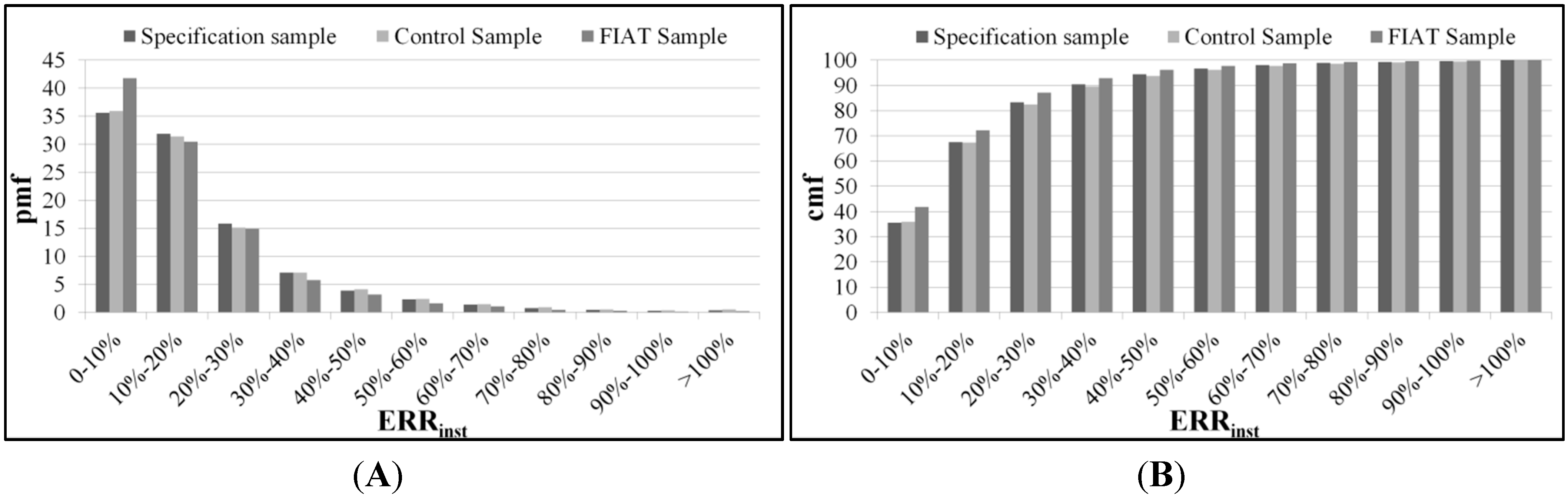
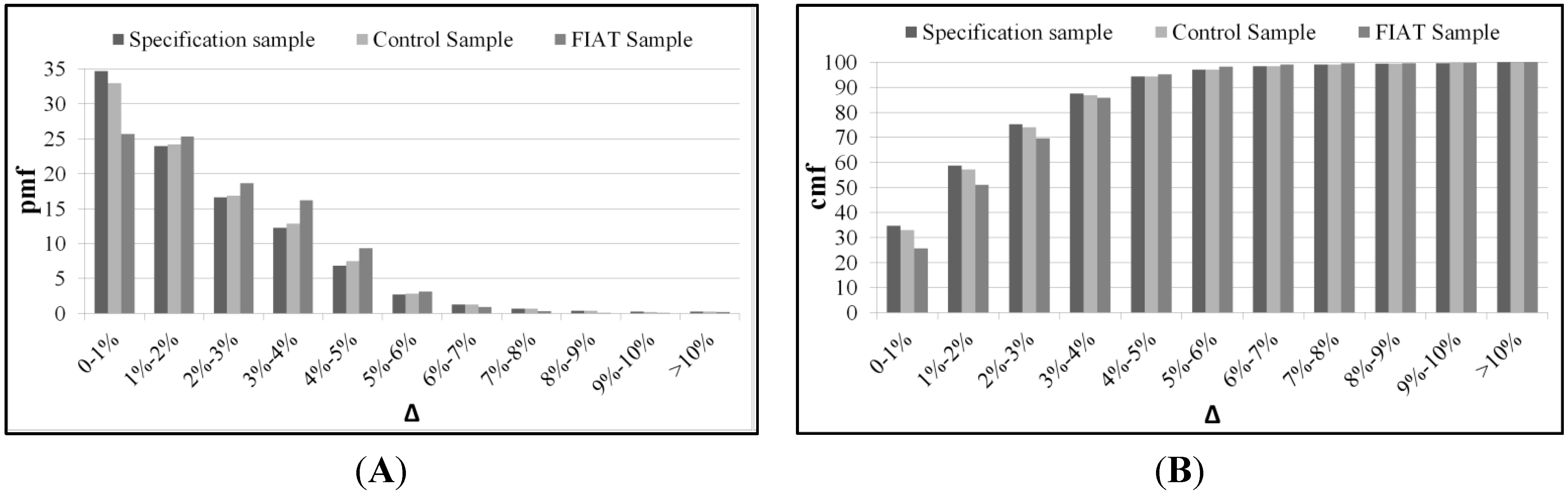
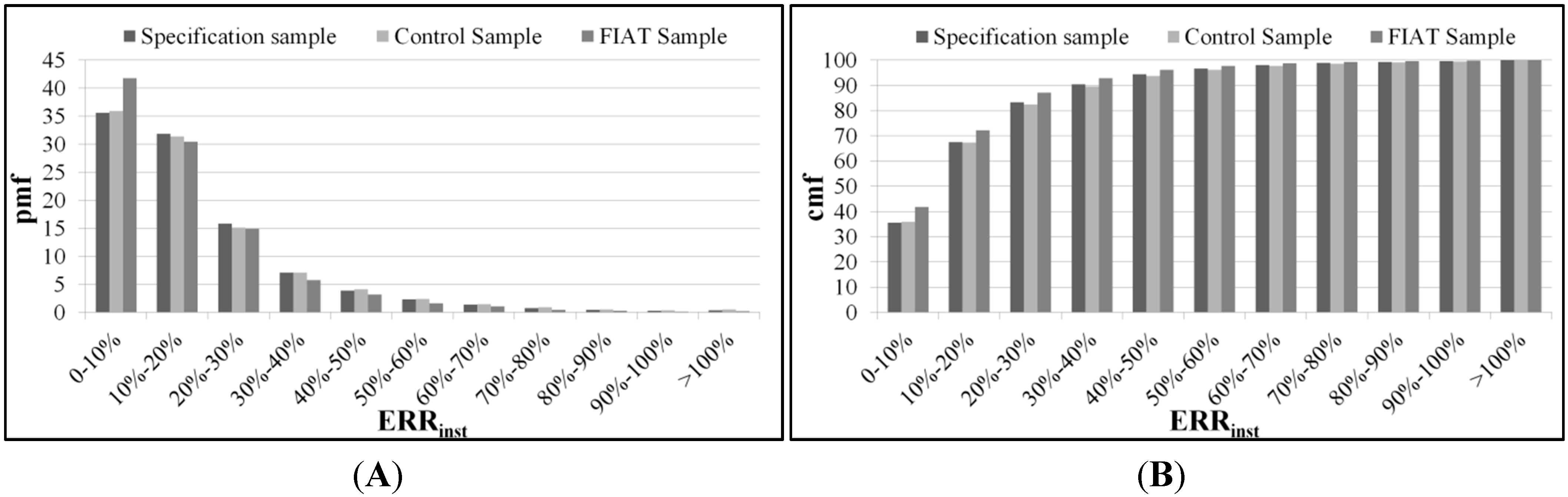
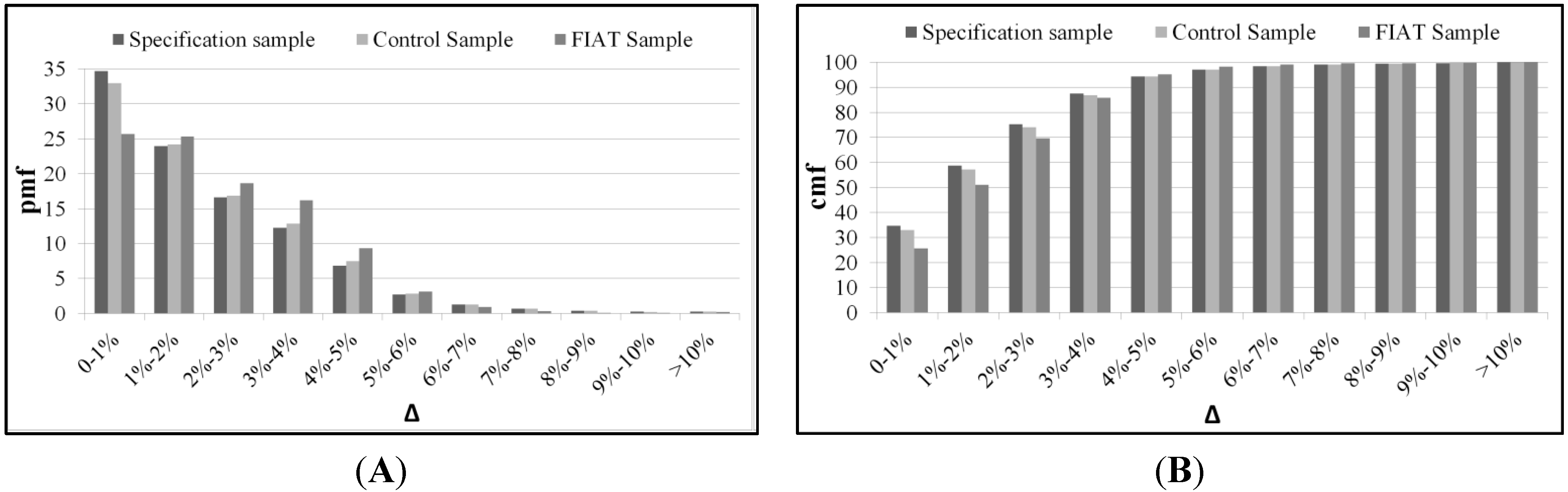
4.1. Validation of Consumption Data
4.2. Model Specification and Estimation of the Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Constant | v2 | a | Gas Pedal | Intake Air | |
|---|---|---|---|---|---|
| β | 7.750 | 0.005 | 6.420 | 0.212 | 0.004 |
| t | 123,000 | 77.600 | 84.500 | 186,000 | 36.400 |
| sig. | <0.001 | <0.001 | <0.001 | <0.001 | <0.001 |
| std. β | - | 0.205 | 0.225 | 0.490 | 0.098 |
| T | - | 0.797 | 0.786 | 0.797 | 0.763 |
| VIF | - | 1.255 | 1.273 | 1.254 | 1.311 |
| R2 | 0.483 | ||||
| std. error | 3.759 | ||||
- RMSE (root mean square error), which is the ratio between the inner deviance and the total numerosity, n
- MAPE (mean absolute percentage error), which is a measure of accuracy of a method for constructing fitted time series values
| RMSE | MAPE | |
|---|---|---|
| Specification Sample | 3.790 | 0.188 |
| Control Sample | 3.670 | 0.184 |
| Fiat Sample | 3.330 | 0.161 |
| Constant | v2 | a | Gas Pedal | |
|---|---|---|---|---|
| β | 9.530 | 0.005 | 7.300 | 0.222 |
| t | 238.000 | 88.200 | 101.000 | 199.000 |
| sig. | <0.001 | <0.001 | <0.001 | <0.001 |
| std. β | - | 0.228 | 0.255 | 0.513 |
| T | - | 0.845 | 0.873 | 0.846 |
| VIF | - | 1.183 | 1.145 | 1.182 |
| R2 | 0.476 | |||
| std. error | 3.785 | |||
| reduced.2 | Constant | v2 | a | Gas Pedal | |
| β | 12.497 | - | 5.430 | 0.255 | |
| t | 551.674 | - | 75.144 | 233.576 | |
| sig. | <0.001 | - | <0.001 | <0.001 | |
| std. β | - | - | 0.190 | 0.590 | |
| R2 | 0.432 | ||||
| std. error | 3.940 | ||||
| reduced.3 | |||||
| β | 12.935 | - | - | 0.272 | |
| t | 573.849 | - | - | 248.090 | |
| sig. | <0.001 | - | - | <0.001 | |
| std. β | - | - | - | 0.631 | |
| R2 | 0.398 | ||||
| std. error | 4.058 | ||||
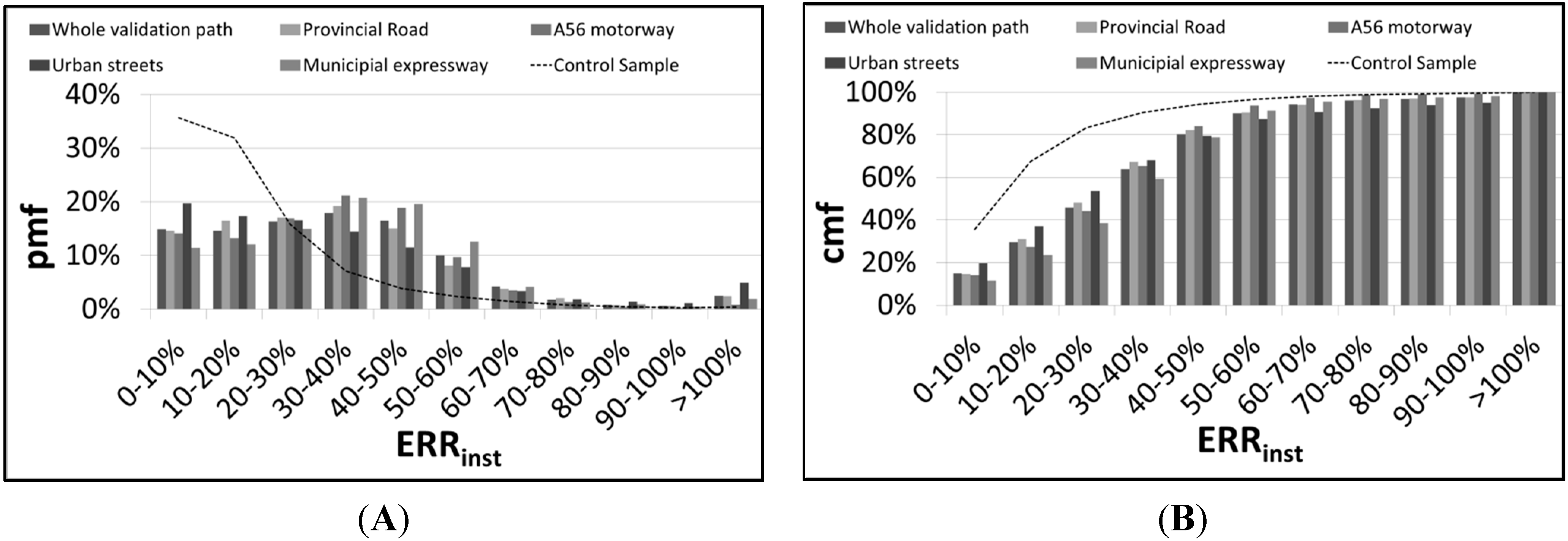
4.3. Model Transferability

4.4. Parameters Dispersion
| Min | Max | Q1 | Q2 | Q3 | |
|---|---|---|---|---|---|
| β0 | 4.580 | 13.500 | 7.440 | 8.970 | 10.200 |
| β1 | 1.53 × 10−4 | 1.02 × 10−2 | 4.01 × 10−3 | 6.40 × 10−3 | 7.65 × 10−3 |
| β2 | −5.620 | 21.200 | 1.750 | 11.800 | 14.200 |
| β3 | 0.115 | 0.518 | 0.184 | 0.236 | 0.288 |
| R2 | 0.226 | 0.785 | 0.474 | 0.545 | 0.630 |
| RMSE | 2.320 | 5.400 | 3.020 | 3.420 | 3.760 |
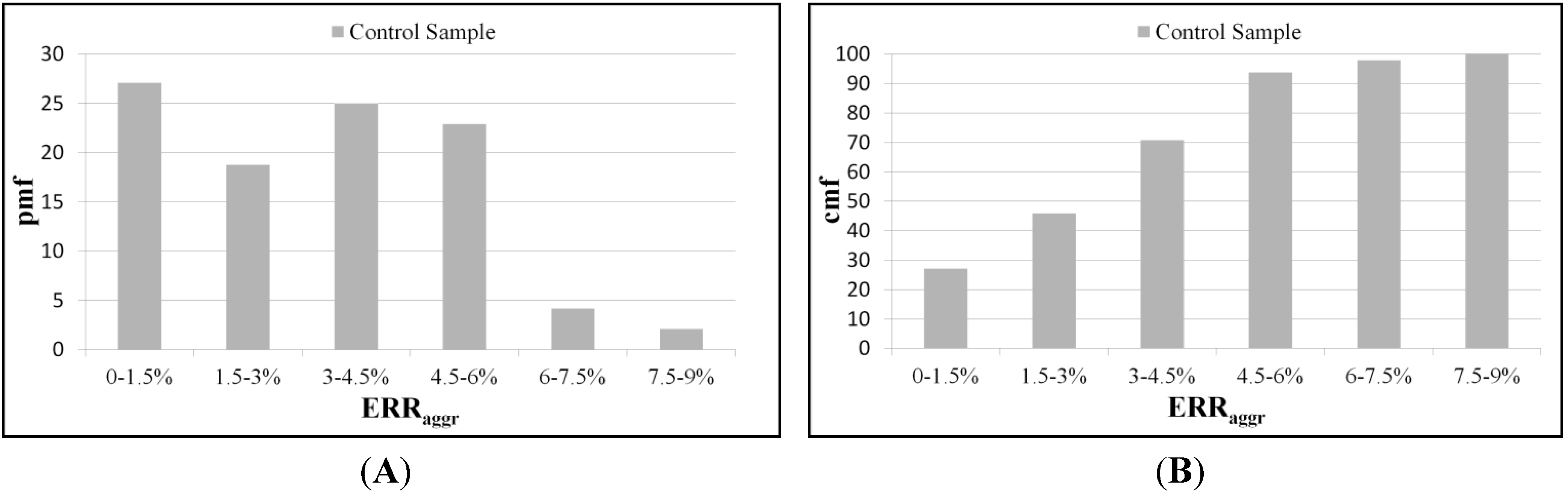
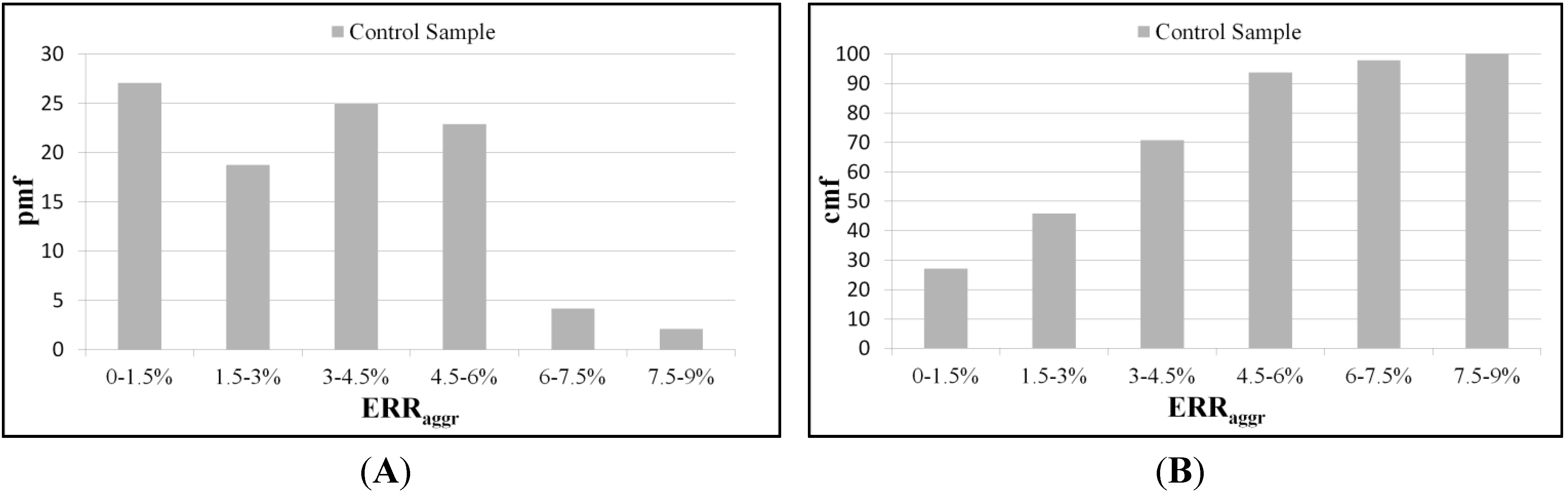
4.5. Aggregate Analysis
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Molenaar, R.; van Bilsen, A.; van der Made, R.; de Vries, R. Full spectrum camera simulation for reliable virtual development and validation of ADAS and automated driving applications. In Intelligent Vehicles Symposium (IV), 2015 IEEE, Proceedings of 2015 IEEE Intelligent Vehicles Symposium (IV2015), Seoul, Korea, 28 June–1 July 2015; IEEE: Piscataway, NJ, USA, 2015. [Google Scholar]
- Bifulco, G.N.; Pariota, L.; Galante, F.; Fiorentino, A. Coupling Instrumented Vehicles and Driving Simulators: Opportunities from the DRIVE IN2 Project. In Proceedings of 15th IEEE International Conference on Intelligent Transportation Systems, Anchorage, AK, USA, 16–19 September 2012; IEEE: Piscataway, NJ, USA, 2012. [Google Scholar]
- Davitashvili, T. Mathematical Modeling Pollution from Heavy Traffic in Tbilisi Streets. Available online: http://www.wseas.us/e-library/transactions/environment/2009/29-536.pdf (accessed on 16 October 2015).
- Pamanikabud, P. Impact Assessment of Motorway Traffic Noise Using Visualized Noise Mapping Technique. WSEAS Trans. Environ. Dev. 2009, 5, 24–33. [Google Scholar]
- Cartenì, A. Urban Sustainable Mobility. Part 1: Rationality in Transport Planning. Available online: http://www.transportproblems.polsl.pl/pl/Archiwum/2014/zeszyt4/2014t9z4_04.pdf (accessed on 19 October 2015).
- Chi, Y.; Guo, Z.; Zheng, Y.; Zhang, X. Scenarios Analysis of the Energies’ Consumption and Carbon Emissions in China Based on a Dynamic CGE Model. Sustainability 2014, 6, 487–512. [Google Scholar] [CrossRef]
- Zhang, X.; Xie, J.; Rao, R.; Liang, Y. Policy Incentives for the Adoption of Electric Vehicles across Countries. Sustainability 2014, 6, 8056–8078. [Google Scholar] [CrossRef]
- Sivak, M.; Schoettle, B. Eco-driving: Strategic, tactical, and operational decisions of the driver that influence vehicle fuel economy. Transp. Policy 2012, 22, 96–99. [Google Scholar] [CrossRef]
- D’Acierno, L.; Montella, B.; Gallo, M. A fixed-point model and solution algorithms for simulating urban freight distribution in a multimodal context. J. Appl. Sci. 2011, 11, 647–654. [Google Scholar]
- Gori, S.; La Spada, S.; Mannini, L.; Nigro, M. Emission dynamic meso-simulation model to evaluate traffic strategies in congested urban networks. IET Intell. Transp. Syst. 2014, 9, 333–342. [Google Scholar] [CrossRef]
- Mauro, R.; Giuffrè, O.; Grana, A.; Chiappone, S. A statistical Approach for Calibrating a Microsimulation Model for Freeways. WSEAS Trans. Environ. Dev. 2014, 10, 496–508. [Google Scholar]
- Donateo, T. CO2 impact of intelligent plugin vehicles. WSEAS Trans. Environ. Dev. 2013, 9, 240–252. [Google Scholar]
- De Luca, S.; di Pace, R.; Marano, M. Modelling the adoption intention and installation choice of an automotive after-market mild-solar-hybridization kit. Transp. Res. Part C 2015, 56, 426–445. [Google Scholar] [CrossRef]
- Ntziachristos, L.; Gkatzoflias, D.; Kouridis, C.; Samaras, Z. COPERT: A European road transport emission inventory model. In Information Technologies in Environmental Engineering; Springer: Berlin, Germany, 2009; pp. 491–504. [Google Scholar]
- Brzezinski, D.J.; Newell, T.P. MOBILE 6 A Revised Model for Estimation of Highway Vehicle Emissions. Emiss. Inventory Living Glob. Environ. 1998, 1, 526–567. [Google Scholar]
- Koupal, J.; Cumberworth, M.; Michaels, H.; Beardsley, M.; Brzezinski, D.J. Design and Implementation of MOVES: EPA’s New Generation Mobile Source Emission Model. Available online: http://www3.epa.gov/ttn/chief/conference/ei12/mobile/koupal.pdf (accessed on 16 October 2015).
- Hui, G.; Zhang, Q.Y.; Yao, S.; Wang, D.H. Evaluation of the International Vehicle Emission (IVE) model with on-road remote sensing measurements. J. Environ. Sci. 2007, 19, 818–826. [Google Scholar]
- Zhou, X.; Huang, J.; Weifeng, L.; Li, D. Fuel consumption estimates based on driving pattern recognition. In Green Computing and Communications (GreenCom), 2013 IEEE and Internet of Things (iThings/CPSCom), IEEE International Conference on and IEEE Cyber, Physical and Social Computing, Proceedings of 2013 IEEE International Conference on Green Computing and Communications (GreenCom) and IEEE Internet of Things(iThings) and IEEE Cyber, Physical and Social Computing(CPSCom), Beijing, China, 20–23 August 2013; IEEE: Piscataway, NJ, USA, 2013. [Google Scholar]
- Post, K.; Kent, J. H.; Tomlin, J.; Carruthers, N. Fuel consumption and emission modelling by power demand and a comparison with other models. Transp. Res. Part A General 1984, 18, 191–213. [Google Scholar] [CrossRef]
- Akcelik, R. Efficiency and drag in the power-based model of fuel consumption. Transport. Res. B Methodological 1989, 23, 376–385. [Google Scholar] [CrossRef]
- Leung, D.Y.C.; Williams, D.J. Modeling of motor vehicle fuel consumption and emissions using a power-based model. Environ. Monit. Assess. 2000, 65, 21–29. [Google Scholar] [CrossRef]
- Rakha, H.A.; Ahn, K.; Trani, A. Development of VT-Micro model for estimating hot-stabilized light duty vehicle and truck emissions. Transp. Res. Part D Transp. Environ. 2004, 9, 49–74. [Google Scholar]
- Wong, J.Y. Theory of Ground Vehicles; John Wiley & Sons: Hoboken, NJ, USA, 2001. [Google Scholar]
- Rakha, H.A.; Ahn, K.; Moran, K.; Searens, B.; Van den Bulck, E. Virginia Tech Comprehensive Power-Based Fuel Consumption Model: Model development and testing. Transp. Res. Part D Transp. Environ. 2011, 16, 492–503. [Google Scholar] [CrossRef]
- Ahn, K. Microscopic Fuel Consumption and Emission Modeling. Master’s Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 1998. [Google Scholar]
- Barth, M.; An, F.; Younglove, T.; Scora, G.; Levine, C.; Ross, M.; Wenzel, T. Development of a Comprehensive Modal Emissions Model. Available online: http://onlinepubs.trb.org/Onlinepubs/nchrp/nchrp_w122.PDF (accessed on 16 October 2015).
- Lee, M.G.; Park, Y.K.; Jung, K.K.; Yoo, J.J. Estimation of Fuel Consumption using In-Vehicle Parameters. Int. J. u- e-Serv. Sci. Technol. 2011, 4, 37–46. [Google Scholar]
- Van der Voort, M.; Dougherty, M.S.; van Maarseveen, M. A prototype fuel-efficiency support tool. Transp. Res. Part C 2001, 9, 279–296. [Google Scholar] [CrossRef]
- Larsson, H.; Ericsson, E. The effects of an acceleration advisory tool in vehicles for reduced fuel consumption and emissions. Transp. Res. Part D 2009, 14, 141–146. [Google Scholar] [CrossRef]
- Montella, A.; Pariota, L.; Galante, F.; Imbriani, L.L.; Mauriello, F. Prediction of drivers’ speed behavior on rural motorways based on an instrumented vehicle study. Transp. Res. Rec. 2014, 2434, 52–62. [Google Scholar] [CrossRef]
- Bifulco, G.N.; Galante, F.; Pariota, L.; Russo Spena, M. Identification of driving behaviors with computer-aided tools. In Computer Modeling and Simulation (EMS), UKSim-AMSS 6th European Modelling Symposium, Proceedings of the 2012 Sixth UKSim/AMSS European Symposium on Computer Modeling and Simulation, Valetta, Malta, 14–16 November 2012; IEEE: Piscataway, NJ, USA, 2012. [Google Scholar]
- Bifulco, G.N.; Pariota, L.; Simonelli, F.; di Pace, R. Real-time smoothing of car-following data through sensor-fusion techniques. Procedia Soc. Behav. Sci. 2011, 20, 524–535. [Google Scholar] [CrossRef] [Green Version]
- Alessandrini, A.; Filippi, F.; Ortenzi, F. Consumption Calculation of Vehicles Using OBD Data. Available online: http://www3.epa.gov/ttnchie1/conference/ei20/session8/aalessandrini.pdf (accessed on 19 October 2015).
- Pariota, L.; Bifulco, G.N. Experimental evidence supporting simpler Action point paradigms for car-following. Transp. Res. Part F 2015. [Google Scholar] [CrossRef]
- Pariota, L.; Bifulco, G.N.; Brackstone, M. A linear dynamic model for driving behaviour in car-following. Transp. Sci. 2015. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bifulco, G.N.; Galante, F.; Pariota, L.; Spena, M.R. A Linear Model for the Estimation of Fuel Consumption and the Impact Evaluation of Advanced Driving Assistance Systems. Sustainability 2015, 7, 14326-14343. https://doi.org/10.3390/su71014326
Bifulco GN, Galante F, Pariota L, Spena MR. A Linear Model for the Estimation of Fuel Consumption and the Impact Evaluation of Advanced Driving Assistance Systems. Sustainability. 2015; 7(10):14326-14343. https://doi.org/10.3390/su71014326
Chicago/Turabian StyleBifulco, Gennaro Nicola, Francesco Galante, Luigi Pariota, and Maria Russo Spena. 2015. "A Linear Model for the Estimation of Fuel Consumption and the Impact Evaluation of Advanced Driving Assistance Systems" Sustainability 7, no. 10: 14326-14343. https://doi.org/10.3390/su71014326
APA StyleBifulco, G. N., Galante, F., Pariota, L., & Spena, M. R. (2015). A Linear Model for the Estimation of Fuel Consumption and the Impact Evaluation of Advanced Driving Assistance Systems. Sustainability, 7(10), 14326-14343. https://doi.org/10.3390/su71014326