Abstract
Currently, urban traffic flow is an increasing problem, and achieving sustainability in urban mobility is essential for enhancing both mobility and the quality of life. This study investigates the factors influencing urban traffic sustainability from two critical perspectives: autonomous vehicle policy governance and citizen perception. By utilizing Partial Least Squares Structural Equation Modeling (PLS-SEM), this study analyzes data from 502 valid responses gathered through online surveys. The findings reveal that, from the citizen perception perspective, both accessibility and safety play a significant role in advancing urban traffic sustainability, while smart mobility modes were found to have no substantial impact. From a policy governance standpoint, land transportation planning did not significantly influence citizens’ perceptions of accessibility, safety, or smart mobility. In contrast, vehicle management measures were positively correlated with these dimensions. Furthermore, the scope of service point support was found to enhance accessibility and smart mobility but did not have a noteworthy effect on safety. Vehicle deployment allocation, however, was positively associated with improvements in accessibility, safety, and smart mobility. This study offers valuable insights for urban traffic policy formulation, emphasizing the pivotal role of regulatory frameworks, vehicle management strategies, and urban infrastructure in fostering sustainable urban mobility.
1. Introduction
As urbanization and economic development accelerate, the urbanization levels in many countries have steadily risen, leading to a significant increase in the number of private vehicles [1]. This intensification of urbanization has driven up the demand for urban transport, making mobility challenges more pressing [2]. In major cities and transportation hubs, traffic volumes have already reached or surpassed the design capacity of roads, resulting in severe congestion [3,4]. Specifically, Lomax, Turner [5] predicted that by 2020, traffic congestion in the United States would cause travelers to lose up to 8.4 billion hours and consume an additional 4.5 billion gallons of fuel, amounting to an economic loss of $199 billion. This highlights not only the economic burden but also the significant environmental and societal consequences, such as increased energy consumption and reduced well-being for urban residents. Consequently, the development of a sustainable urban transport system that balances individual mobility with broader societal welfare has become a critical issue.
With the acceleration of urbanization, public transportation systems have played a pivotal role in alleviating traffic congestion and reducing carbon emissions [6]. For instance, they can help address the “last mil”. solution, assisting users from home to bus or subway stations, thereby enhancing the sustainability and appeal of urban transport [7]. Traditional public transportation modes often fail to cover the origin and destination points of residents’ trips, leading many passengers to rely on private cars or other unsustainable modes of transport to complete their last-mile travel.
Autonomous vehicles (AVs), as an emerging mode of transportation, have the potential to address this issue. Through flexible routing and on-demand services, AVs can offer passengers a seamless travel experience, reducing the reliance on private cars and enhancing the overall efficiency of public transport [8]. Autonomous vehicle services, such as “RoboTax”., represent a cutting-edge technological and service model that offers a safer and more reliable transportation alternative [9]. Autonomous vehicles are equipped with the ability to sense their environment and communicate seamlessly with surrounding vehicles and infrastructure. They optimize traffic signal control, enhance road capacity, and reduce accidents, thus making a substantial contribution to alleviating traffic congestion [10]. Additionally, autonomous vehicles alleviate the pressure on parking demand [11]. Their efficient parking methods, including stacked parking systems, greatly increase the utilization of parking spaces, thus reducing parking demand in commercial areas, freeing up curb spaces for public use, and improving overall road capacity [10,12]. In parking management, autonomous vehicles integrate IoT sensors and centralized management platforms, allowing for dynamic pricing adjustments and optimizing supply–demand matching, thus enhancing urban mobility and land use efficiency [13]. Furthermore, these vehicles can coordinate with smart infrastructure to enable smarter route selection, quicker response times, and denser vehicle spacing, all of which mitigate the impact of rising traffic demand [14]. Autonomous vehicles are also expected to promote flexible, on-demand car-sharing services, reducing reliance on private vehicles and their associated energy consumption [14,15]. As such, the advent of autonomous vehicles not only helps ease urban traffic challenges but also introduces a transformative mobility experience for travelers.
In recent years, autonomous vehicles have been subjected to large-scale trials in several cities, influencing future strategies for sustainable investments in urban transport [16]. Numerous studies have explored the advantages of autonomous vehicles in reshaping smart city mobility, particularly in terms of enhancing safety, road efficiency, driver productivity, and energy conservation [17,18,19]. Some studies have empirically examined how autonomous vehicles influence individuals’ travel mode choices and assessed their potential impacts on sustainability [20]. Other studies position autonomous vehicles as a key technological solution for smart city mobility, advancing both sustainable urban transportation and overall smart city development [21]. These studies collectively confirm that integrating autonomous vehicle technology into the transportation system has significant implications for smart city mobility and urban traffic sustainability. However, current research primarily focuses on technological advancements, but there remains a dearth of discussion on how to effectively incorporate autonomous vehicles into urban transportation policies and governance frameworks. Moreover, much of the literature on urban traffic development has concentrated on the positive impacts of technological progress, often overlooking the potential negative consequences. For example, predictive studies suggest that the convenience of autonomous vehicles may encourage increased vehicle usage and longer travel distances, leading to higher energy consumption and pollution emissions, along with adverse social and environmental consequences [22]. On the one hand, future urban transportation solutions will increasingly rely on public transport systems, comprising subways, buses, light rail, and trams, that not only cater to diverse travel demands and optimize road resource utilization but will also play a pivotal role in fostering the development of low-carbon urban mobility [6]. On the other hand, propelled by technological advancements, the rise in autonomous vehicles (AVs) is instigating a paradigm shift in urban transportation systems. As a critical element of urban mobility, public transport systems are inevitably undergoing structural transformations driven by AV technology [23]. Autonomous vehicles and public transport are not mutually exclusive; rather, AVs should complement public transport networks by addressing gaps. For instance, AVs can provide a solution to the “last mil”. challenge, assisting passengers from their homes to bus or subway stations, thereby enhancing the sustainability and overall appeal of urban transport [7].
Additionally, the ability of autonomous vehicles to navigate complex urban traffic and extreme scenarios remains limited, with any failure in vehicle-to-vehicle or vehicle-to-infrastructure communication systems potentially resulting in severe consequences [24]. Furthermore, the current legal framework for autonomous vehicles is incomplete, with significant gaps in areas such as accident liability, usage regulations, ownership rights, and integration into urban transport systems [25]. Given these environmental and regulatory challenges, the development and implementation of autonomous vehicles must be rigorously regulated. Municipal managers and urban transport planners face the critical challenge of ensuring that the benefits of autonomous vehicles are fully realized while minimizing their potential negative effects [26]. Docherty, Marsden [27] highlight the widening gap between rapid technological advancements and the capacity of governance systems to address the emerging challenges, with autonomous vehicles serving as a prominent example. The swift progress of autonomous vehicle (AV) technology has introduced significant governance challenges, such as the need for updated regulations, optimized infrastructure, and enhanced public acceptance. To tackle these issues, policymakers must implement targeted policies that not only facilitate the integration of AVs into urban transportation systems but also promote urban sustainability. For instance, Golbabaei, Yigitcanlar [28] emphasized the importance of policy integration in multi-modal transport systems, service accessibility, and infrastructure optimization to achieve sustainable mobility. Similarly, Lyons [29] argued that intelligent city transportation should be affordable, efficient, attractive, and sustainable. Although AVs offer the potential to resolve current traffic challenges, policymaking must also address public concerns about safety, as well as demographic factors such as age and gender [30]. This underscores the necessity for policymakers to consider both public safety and demographic influences.
In this study, government policies play a crucial role in the promotion of autonomous vehicles (AVs). Through policy support such as land transport planning and vehicle management measures, urban infrastructure can be optimized, including the creation of dedicated lanes and intelligent traffic signals, thereby enhancing the operational efficiency and safety of AVs [31].From the perspective of land transport planning, policymakers are investigating how autonomous vehicles will influence transportation and land use patterns, with the goal of improving existing transport systems while minimizing the challenges associated with the transition to autonomous mobility [14]. Governments are also encouraging the adoption of autonomous vehicles through policy incentives. Studies show that autonomous vehicles have the potential to provide significant environmental benefits to urban transport systems. Many studies emphasize the importance of strategic plans formulated by urban decision-makers for the successful implementation of autonomous vehicles, ensuring that their full potential is realized to foster more sustainable urban mobility [17,32,33,34]. Therefore, it is imperative for governments to balance public needs and interests while reinforcing regulations and providing guidance to foster the healthy development of autonomous vehicle technology, ensuring that citizens enjoy safer, more accessible, and smarter travel experiences. To address public concerns about privacy and mitigate technological skepticism surrounding autonomous vehicles, governments and research institutions are actively working to bolster public trust in this emerging technology. This is being achieved through the implementation of robust privacy protection policies, enhanced data security management, and the promotion of transparent technological regulations. These governance strategies aim to increase public willingness to adopt and support autonomous vehicles [35].
The sustainable development of urban transport systems requires not only effective policy governance to support autonomous vehicle infrastructure but also the consideration of public acceptance [36]. The widespread adoption of autonomous vehicles will profoundly affect users’ travel habits and lifestyles [37]. Their operational models and interactions with urban infrastructure will reshape future urban transport patterns [38]. The increased accessibility and convenience of autonomous vehicles (AVs) can significantly reduce citizens’ dependence on private gasoline-powered cars, thereby lowering carbon emissions and enhancing air quality [28,39,40]. Furthermore, by integrating multi-modal transportation systems and smart infrastructure (e.g., AV-specific lanes and real-time carpool matching algorithms), the travel experience can be optimized, leading to greater resource efficiency, reduced traffic congestion, and improved overall sustainability of urban transport [41]. For instance, integrating AVs with public transportation systems not only mitigates the environmental impact by reducing emissions but also fosters social equity by providing affordable and accessible transportation options for all population groups [28,40]. Autonomous vehicles, as an emerging mode of transport, have the potential to resolve this issue. Through flexible routing and on-demand services, AVs can offer passengers a seamless travel experience, reducing reliance on private cars and enhancing the overall efficiency of public transportation [8]. Consequently, urban decision-makers can leverage policy governance to enhance accessibility and convenience, offering more diverse and sustainable travel options [42]. In addition, citizens’ experiences with barrier-free and environmentally friendly travel can enhance social equity, improve urban environments, and optimize the “last mil”. travel experience, thereby increasing the sustainability of urban transportation.
Building on this, the present study investigates the factors influencing the overall sustainability of urban transportation within the realm of AVs, with a focus on government transportation policies, specifically land transport planning, vehicle management measures, service point coverage, and vehicle distribution, as well as the individual dimensions of citizens’ travel perceptions. This study takes a deeper, more detailed approach in exploring these factors from both macro and micro perspectives.
This study addresses the following core question: how do government transportation policies at the macro level and citizens’ travel perceptions at the micro level jointly shape the factors influencing urban transportation sustainability (as illustrated in the theoretical framework, where relationships between variables are clearly presented in a diagram)? By constructing relevant latent variables for both government policies and citizen perceptions, this study employs the PLS-SEM method to explore the policy management dimension of AV implementation, the travel perception dimension of urban residents, and the factors influencing urban transportation sustainability. Ultimately, seven key factors were identified: land transportation planning, vehicle management measures, service point coverage, vehicle distribution, accessibility, safety, intelligence, and urban transportation sustainability. This study confirms that factors such as citizen perceptions, policy measures, and technological characteristics significantly influence urban transportation sustainability, with further exploration needed regarding how policy implementation impacts citizens’ AV travel experiences.
The significance of this study is multi-fold: The introduction of the user-centric perception dimension into the study of urban transportation sustainability offers solutions for enhancing accessibility, intelligence, and safety. By analyzing citizens’ perceptions of autonomous travel services and improvements to current traffic flow, this study advances planning for further transportation sustainability. Moreover, this research is the first to integrate the government policy planning dimension into urban transportation sustainability, offering new perspectives and insights for both academic discourse and practical applications. Lastly, this study provides valuable insights and recommendations for AV technology developers and transportation policy planners, encouraging the development of AV infrastructure that aligns more closely with citizens’ travel needs. This approach fosters a balanced development across environmental, resource, social, and economic dimensions, contributing to the creation of a more comprehensive and sustainable transportation system.
2. Research Hypotheses
2.1. Public Perception of Travel and Urban Transportation Sustainability
The public’s acceptance of autonomous vehicles plays a crucial role in shaping policy governance and cannot be overlooked. This acceptance hinges on the public’s awareness, attitudes, and values regarding new technologies. The dimension of public travel perception pertains to the attitudes and sentiments passengers have toward the quality and performance of existing urban transportation services. Residents’ attitudes are closely linked to the implementation and success of sustainable urban transportation strategies [43]. Sustainable urban transportation aims to provide convenience, affordability, accessibility, and ease of travel while minimizing adverse environmental and societal impacts [42]. Additionally, we have broadened our discussion of sustainability to encompass environmental, social, and economic dimensions. For instance, the integration of autonomous vehicles (AVs) with public transportation systems not only mitigates the environmental impact by reducing emissions but also fosters social equity by offering affordable and accessible transportation options to all demographic groups [28,40]. Furthermore, promoting shared ownership and vehicle usage models, such as car-sharing and ride-hailing, can optimize vehicle utilization, reduce the total number of vehicles on the road, and alleviate the demand for parking spaces, thereby advancing resource efficiency and urban sustainability [29].
This connection indicates that increased accessibility and convenience of autonomous vehicles for citizens can reduce their reliance on private gasoline-powered cars, leading to lower carbon emissions and improved air quality [28,39,40]. Additionally, by integrating multi-modal transportation systems and intelligent infrastructure, such as AV-specific lanes and real-time carpool matching algorithms, the travel experience can be optimized, significantly boosting resource efficiency, alleviating traffic congestion, and enhancing the overall sustainability of urban transportation [41]. Simultaneously, the public’s perception of autonomous vehicles is becoming increasingly important, as residents must embrace new public transport alternatives and reduce their dependence on private vehicles [44]. To achieve these goals, public policies must cultivate the acceptance of sustainable transportation modes to ensure that transportation systems effectively meet the needs of citizens [36].
2.1.1. Accessibility
Accessibility serves as a bridge between transportation planning and residents’ convenience. Generally, it refers to an individual’s (or group’s) ability to reach various destinations seamlessly through a combination of transportation modes [45]. Autonomous vehicles offer considerable advantages to users of mobile devices by providing diverse mobility options, facilitating seamless access [46]. Although autonomous vehicles (AVs) present significant advantages in enhancing traffic efficiency and safety, their technological vulnerabilities must not be underestimated. For instance, AVs depend on real-time data processing and continuous network connectivity, meaning that delays or network disruptions could lead to functional failures [47]. These vehicles represent a leap forward in intelligent mobility, as demonstrated by the public’s ability to access real-time travel information, which in turn leads to time savings, improved journey experiences, cost reductions, and lower carbon emissions [48]. Autonomous vehicles also enhance accessibility for individuals with limited transportation alternatives [49]. Thus, when autonomous vehicles meet the accessibility needs of users, they positively impact urban transportation sustainability. This leads to Hypothesis 1 (H1):
H1.
The accessibility of autonomous vehicles positively influences urban transportation sustainability.
2.1.2. Safety
Autonomous vehicles, or self-driving cars, are capable of executing driving tasks safely without human intervention [50]. The route design of these vehicles can be managed online, allowing for real-time adjustments based on traffic and road conditions to select optimal paths that minimize travel time and energy consumption [51,52]. In traditional driving, human factors often dominate safety concerns, with individuals relying on proximity to other vehicles or traffic to assess safety [49]. Autonomous vehicles equipped with advanced sensors and algorithms detect obstacles and can stop or reroute when necessary, significantly reducing traffic accident risks.
Autonomous vehicles (AVs) replace human drivers with automated systems that leverage superior environmental recognition, decision-making abilities, and driving skills to control the vehicle, enhancing road traffic safety [14]. We have also incorporated relevant case studies that highlight the potential vulnerabilities of AVs. Despite the intelligent advantages of AVs, one notable weakness lies in their reliance on onboard networks, which are vulnerable to interference. While AVs benefit from advanced digital technologies that reduce human error, they also face increasingly complex cybersecurity threats [53]. Hackers could potentially exploit these network vulnerabilities, posing significant risks to personal security and privacy, thereby underscoring the inherent cybersecurity concerns surrounding AV technology. Onboard networks are exposed to a range of threats and attacks that could cause the vehicle’s onboard computer to issue erroneous commands, directly compromising traffic safety. Therefore, in the event of any malfunction or compromise of components, it is crucial to implement robust safety and security measures to prevent or mitigate such risks [54,55].
By optimizing driving strategies and energy management, autonomous vehicles use energy more efficiently, lower emissions, and reduce environmental impacts. Therefore, when autonomous vehicles meet users’ safety needs, they positively influence urban transportation sustainability. This leads to Hypothesis 2 (H2):
H2.
The safety of autonomous vehicles positively influences urban transportation sustainability.
2.1.3. Smart Mobility
Autonomous vehicles can perform driving tasks with high safety and detect environmental obstacles, stopping or rerouting when necessary [56]. Smart transportation systems, through distributed real-time environmental sensing, allow vehicles to cooperate with traffic management systems, promoting safe and eco-friendly travel [57]. Many cities are now striving for “smartnes”. to improve energy efficiency, traffic management, and public services [58]. By integrating new technologies into urban management, smart cities offer innovative solutions to challenges related to sustainability, equity, and economic growth [59,60,61]. In other words, the smart city agenda is designed to address a wide range of urban challenges, boosting economic growth, competitiveness, and innovation, while achieving sustainability goals like reducing emissions, enhancing energy efficiency, and improving the quality of life [62]. “Intelligent transportation is one of the primary features of smart citie”. [50], playing a key role in urban transformation [63]. It not only fosters urban expansion and development but also interacts with spatial policies to shape the dynamics of urbanization [64]. Thus, when autonomous vehicles meet the demand for smart mobility, they positively influence urban transportation sustainability. This leads to Hypothesis 3 (H3):
H3.
The smart mobility of autonomous vehicles positively impacts urban transportation sustainability.
2.2. Land Transportation Planning
Land use and transportation planning are key strategies for regulating traffic and addressing urban challenges while promoting sustainability [65]. Alessandrini, Campagna [66] explored the integration of autonomous vehicles with land use, emphasizing the impact of these vehicles on travel patterns and land use, which will, in turn, shape future urban environments. With the widespread adoption of autonomous vehicles, parking demand will decrease; economic activity density will increase, and productivity will rise [67]. The implementation of autonomous vehicles (AVs) will have profound effects on urban public transport, land rents, and commuting distances, ultimately influencing residents’ lifestyles. AVs will reshape urban parking facility layouts and land use patterns, prompting adaptive shifts in the way people live. Different households may adjust their residential location strategies based on the accessibility of AV services. Some may choose to live near city centers [68], as AVs can alleviate the issue of limited parking spaces, while others may prefer more remote suburban areas, taking advantage of the enhanced commuting convenience offered by shared autonomous vehicles [69].
In line with previous studies, this research suggests that autonomous vehicles’ integration into land transportation planning can enhance residents’ travel accessibility.
Zakharenko [67] studied the effects of autonomous vehicles on urban form, examining commuting patterns, land use, worker welfare, city size, and transportation coverage. In land transportation planning, dedicated emergency lanes and safe zones could be designated, allowing autonomous vehicles to park optimally during the day and ensuring safe driving and parking in city centers [67]. This could reduce traffic accidents, safeguard pedestrians and passengers, and improve overall road safety. Land transportation planning can further support this technology by creating dedicated lanes and optimizing traffic signs and markings, enhancing driving safety for autonomous vehicles. In line with prior research, this study suggests that land transportation planning for autonomous vehicles (AVs) positively influences the safety of residents’ travel. Designating dedicated AV lanes within land planning will reduce conflicts between AVs and other modes of transport, thereby improving their operational efficiency and safety [31]. Updating traffic signs and road markings, such as using high-contrast colors for signage, will make it easier for AV sensors and cameras to detect and interpret them [70]. Furthermore, allocating designated spaces within urban land planning for AV parking, charging, and maintenance, such as establishing AV mid-zone areas near transportation hubs for vehicle scheduling and charging, will further enhance safety and operational efficiency [71]. Adjusting road geometries, such as lane widths, turning radii, and intersection layouts, to accommodate AV driving characteristics will improve both their safety and efficiency [72]. Installing dedicated traffic signals and sensors at intersections and complex road sections to support accurate AV navigation and decision-making is also crucial. Consistent with previous studies, this research affirms that land transportation planning for autonomous vehicles can significantly enhance travel safety for residents.
Land transportation planning can provide crucial infrastructure to support the adoption of autonomous vehicles. As a key component of smart parking systems, autonomous vehicles introduce innovative solutions like remote valet parking, which improves the convenience of parking and optimizes parking and charging experiences [73]. In addition to reducing parking demand per vehicle, autonomous vehicles (AVs) can also reduce the total number of vehicles through shared mobility models, such as ride-hailing services [74,75]. When multiple passengers share a single AV, the total number of vehicles required in the city will decrease significantly, thereby further reducing the demand for parking spaces. During peak hours, most AVs will be used for commuting, but during off-peak periods, empty AVs will need to be parked somewhere. To avoid occupying valuable parking spaces in city centers, AVs can be directed to park in peripheral areas while awaiting new passenger requests. This dynamic scheduling strategy requires the support of intelligent transportation systems to optimize AV parking and dispatching efficiency. As autonomous vehicles become more common, individuals may no longer need to own private parking spaces, as these vehicles can autonomously find parking or return to parking lots when not in use, freeing up more land for other purposes [76]. These discussions lead to Hypotheses 4 (H4), 5 (H5), and 6 (H6):
H4.
Land transportation planning for autonomous vehicles positively influences accessibility.
H5.
Land transportation planning for autonomous vehicles positively influences safety.
H6.
Land transportation planning for autonomous vehicles positively influences smart mobility.
2.3. Vehicle Management Measures
Research on the controllability of interconnected autonomous vehicles in mixed-traffic environments has shown that these vehicles have immense potential to facilitate smooth traffic flow. Consistent with previous studies, this research similarly suggests that implementing vehicle management measures for autonomous vehicles can enhance the accessibility and convenience of transportation systems [77]. Autonomous vehicle management systems can dynamically adjust resources based on real-time road conditions, vehicle density, and area-specific demands, optimizing vehicle efficiency, reducing traffic congestion, improving road safety, and enhancing user experience [66]. The Internet of Vehicles (IoV) enables autonomous vehicles to communicate in real time with other vehicles and infrastructure, improving traffic management efficiency, reducing accidents, and creating a safer environment for autonomous vehicle operations [78,79]. These discussions lead to Hypotheses 7 (H7), 8 (H8), and 9 (H9):
H7.
Vehicle management measures for autonomous vehicles positively influence accessibility.
H8.
Vehicle management measures for autonomous vehicles positively influence safety.
H9.
Vehicle management measures for autonomous vehicles positively influence smart mobility.
2.4. Scope of Service Point Support
Service points such as charging stations, maintenance centers, and technical support hubs are critical for the operation of autonomous vehicles [80]. Expanding the coverage of service points and implementing operations and maintenance systems enhance the efficiency of autonomous vehicle dispatching and contribute to the optimization and maintenance of urban operations, supporting environmental protection efforts [50]. This study asserts that the land transportation planning for autonomous vehicles can enhance the safety of residents’ mobility. A dense network of service points ensures that when autonomous vehicles encounter failures or need maintenance, they can swiftly access support, boosting user confidence in their reliability. Thus, this study posits that the scope of service point support positively impacts smart mobility. These discussions lead to Hypotheses 10 (H10), 11 (H11), and 12 (H12):
H10.
The scope of service point support for autonomous vehicles positively impacts accessibility.
H11.
The scope of service point support for autonomous vehicles positively impacts safety.
H12.
The scope of service point support for autonomous vehicles positively impacts smart mobility.
2.5. Vehicle Deployment Allocation
Autonomous vehicles, by catering to users’ self-directed travel demands, can reduce the number of vehicles needed by households. However, socio-economic factors and convenience may still reduce the willingness to purchase private vehicles [81]. The impact of autonomous vehicles on urban transportation not only enhances traffic convenience and accessibility but also potentially increases travel frequency. The autonomous vehicle system is expected to meet growing transportation demand by improving matching efficiency while reducing vehicle ownership [82,83,84]. Additionally, a “private + share”. ownership model allows individuals to combine traditional vehicle ownership with shared mobility, enabling vehicles to operate autonomously during idle times and serve others [75]. This research suggests that the vehicle deployment allocation of autonomous vehicles can enhance residents’ mobility accessibility.
Moreover, with increasing demand for shared mobility services, the operation of autonomous vehicles has captured significant attention in academia [84]. Autonomous vehicles offer various benefits, including systems that match travel needs with vehicle availability, optimizing travel plans and improving efficiency. Carpooling systems help minimize empty seats, reduce vehicle requirements, and achieve optimal resource allocation [74,75]. In this context, by integrating passenger trips, autonomous vehicles (AVs) can significantly reduce the total number of vehicles in urban areas [41]. This reduction not only alleviates traffic congestion and decreases energy consumption but also reduces the demand for parking spaces. For instance, shared mobility models, such as ride-hailing services, can minimize vehicle vacancy rates, ensuring that each AV is maximally utilized, thereby reducing the need for parking spaces in cities and achieving optimal resource allocation [74,75]. These discussions lead to Hypotheses 13 (H13), 14 (H14), and 15 (H15):
H13.
Vehicle deployment allocation of autonomous vehicles positively impacts accessibility.
H14.
Vehicle deployment allocation of autonomous vehicles positively impacts safety.
H15.
Vehicle deployment allocation of autonomous vehicles positively impacts smart mobility.
Based on the 15 hypotheses outlined above, this study establishes a model to shape the sustainability of urban transportation with autonomous vehicles, as illustrated in Figure 1.
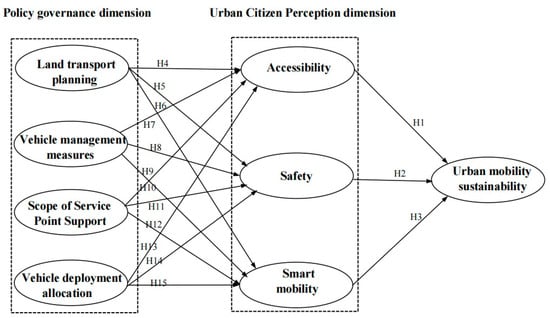
Figure 1.
Model of factors influencing the sustainability of urban transportation.
3. Research Design and Methodology
3.1. Questionnaire Design
Taking into account the unique characteristics of autonomous vehicle travel services, the questionnaire for this study was designed and refined based on prior research findings. The relevant literature supporting the development of the questionnaire items is presented in Table 1. The survey employed in this study is divided into two sections: demographic characteristics of respondents and measurement items assessing how autonomous vehicles influence the sustainability of urban transportation, with responses rated on a 7-point Likert scale.

Table 1.
Various factors and their definitions in the context of this study.
3.2. Data Collection
A convenience sampling strategy was employed for sample selection. Data were collected online via social media platforms and automotive forums, ensuring a diverse and representative sample. Upon collection, the data underwent meticulous cleaning to identify and exclude potentially invalid responses, particularly those exhibiting unusually rapid response times or identical answers. This process was critical in ensuring the accuracy and reliability of the final dataset. Data were gathered from both offline experiences and online surveys. A total of 535 participants were invited, each of whom was required to have prior experience with autonomous vehicles. After removing low-quality responses (e.g., identical answers across all items), the final sample comprised 502 valid responses. The basic characteristics of the survey sample are summarized in Table 2.
Table 2.
Demographic information of respondents.
4. Data Analysis and Results
This study employs Partial Least Squares Structural Equation Modeling (PLS-SEM) as the primary research methodology due to its exceptional ability to handle small sample sizes and non-normal data distributions. PLS-SEM is a structural equation modeling technique based on partial least squares, and it is particularly well suited for exploratory research and the development and validation of complex models. Its primary advantage is its capacity to simultaneously address the relationships between multiple latent and observed variables while also offering flexibility in terms of data distribution requirements, making it especially ideal for studies with small sample sizes. Additionally, PLS-SEM excels in predictive power and model interpretability, providing more reliable results for the study.
The research focuses on users of autonomous vehicle (AV) services. Given the relatively small market size and dispersed nature of the audience for autonomous vehicle services, obtaining large sample sizes is challenging. Consequently, the use of PLS-SEM, which is designed for small sample scenarios, presents significant advantages. Not only does PLS-SEM effectively manage small sample data, but it also accommodates non-normally distributed data, making it the perfect analytical tool for this study. Furthermore, PLS-SEM enables the analysis of complex relationships between multiple latent variables simultaneously, offering valuable insights into the key factors influencing users’ acceptance of autonomous vehicle services.
4.1. Measurement Model Evaluation
The measurement model’s performance was assessed based on two criteria: reliability and validity. Reliability was evaluated using Cronbach’s α coefficient and composite reliability (CR), which measure internal consistency and the factor loadings of each item. Table 3 provides descriptive statistics for each indicator item, along with factor loadings, all of which exceed the recommended threshold of 0.70 [93]. Table 2 presents the Cronbach’s α coefficients and CR values for each construct, with all α values surpassing the established threshold of 0.70 [94] and all CR values exceeding the recommended level of 0.70 [94].
Table 3.
Reliability and validity tests.
A construct is deemed to exhibit good discriminant validity if the square root of the average variance extracted (AVE) exceeds its correlation with any other construct, as outlined by Fornell and Larcker [93]. All factor loadings for the items exceeded the 0.70 benchmark, and the AVE values for all constructs surpassed the critical value of 0.5 [93]. As shown in Table 3, the fit indices for convergent validity yielded satisfactory results, confirming adequate validity. Additionally, Table 4 presents the bold diagonal values, which denote the square root of the AVE for each construct. As all these values exceed their respective correlation coefficients, they confirm strong discriminant validity among the constructs examined in this study. The heterotrait–monotrait (HTMT) ratio was employed as an additional measure of discriminant validity based on the work of Henseler, Ringle [95]. The HTMT ratios for all constructs, as shown in Table 5, did not exceed the threshold of 0.9, as proposed by Gold, Malhotra [96]. In conclusion, the evaluation analysis provides strong evidence of the reliability and validity (both convergent and discriminant) of the model proposed in this study.
Table 4.
Discriminant validity using the Fornell–Larcker criterion.
Table 5.
Discriminant validity using the heterotrait–monotrait (HTMT) ratio matrix.
4.2. Structural Model Evaluation
Figure 2 presents the proposed structural model, and Table 6 summarizes the results of the hypothesis testing. The findings support all hypotheses proposed in this study, with the exception of H1, H2, H3, H8, and H15.
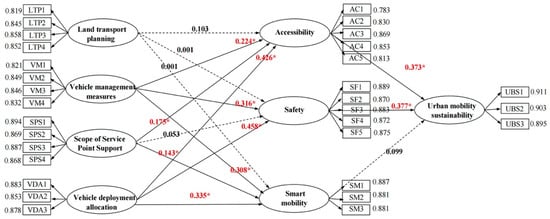
Figure 2.
Path analysis results of the model. * Note that all hypotheses are supported except for H1, H2, H3, H8, and H15.
Table 6.
Path analysis results.
At this stage, a comprehensive evaluation was conducted, focusing on two key metrics: the coefficient of determination (R2) and predictive relevance (Q2), both emphasized by Henseler, Ringle [97]. The R2 value serves as an indicator of the explanatory power of each construct and the model as a whole, with values ranging from 0 to 1. R2 values are typically classified into three categories—0.25, 0.50, and 0.75—representing weak, moderate, and strong explanatory power, respectively, as established by Hair, Risher [98]. Higher R2 values indicate greater explanatory power. As shown in Table 7, R2 values for the constructs in this study ranged from 46.3% to 65.3%. A value exceeding 26% is considered significant, as suggested by Henseler, Ringle [99]. Additionally, Q2 values were calculated for each dependent construct, with all values being non-zero, thereby confirming that the proposed model meets the accepted standards for predictive relevance, in line with Cohen [100] perspective.
Table 7.
Results of R2 and Q².
5. Discussion
The results indicate that the accessibility and safety perceptions of urban citizens have a significant impact on urban transportation sustainability (supporting H1 and H2). Autonomous vehicles not only reshape travel and transportation patterns but also offer new solutions to current traffic problems, heralding a fundamental transformation in mobility [101]. Autonomous vehicles represent a technological leap, with the potential to reduce traffic accidents, optimize overall traffic flow, alleviate congestion, and shorten travel times, ultimately improving the quality of life [102]. Effective city planning and citizen acceptance of autonomous vehicles are key strategies for ensuring the successful implementation of sustainable urban development. Only through the deep integration of autonomous vehicles with the urban transportation system can a revolutionary transformation in safety, efficiency, and sustainability be achieved [103]. Autonomous vehicles contribute to citizen accessibility through improvements in transportation policies, adjustments to traffic and spatial planning, and enhancements in the equity of transportation accessibility while mitigating the negative impacts of motorized transport [104,105]. This has a positive effect on the sustainability of urban transportation.
On the other hand, the impact of smart mobility enabled by autonomous vehicles on urban transportation sustainability was not significant (not supporting H3). This finding diverges from Lyons [29], who emphasized the interdependent and mutually reinforcing relationship between intelligence and sustainable urban transportation. To achieve effective smart urban mobility, it is essential to consider not only technological capabilities but also the broader interactions among various stakeholders and processes, as stated by Lyons [29]. Upon reviewing the research context, we concluded that in the digital age, the role of technological intelligence in shaping transportation sustainability has been overstated. Urban transportation sustainability encompasses multifaceted development across environmental, resource, social, and economic dimensions.
The lack of applicability in our study arises from the specific context of autonomous vehicle research, where the attainment of “intelligenc”. is not always reliant on cutting-edge technologies. Some high-tech solutions, such as advanced shared parking applications, despite their technological sophistication, may inadvertently encourage increased private car usage, counteracting the initial objective of promoting sustainability [29]. Scholars have also critically examined the relationship between smart cities and urban sustainability, questioning the effectiveness of technological innovations, such as autonomous vehicle technology, in addressing urban challenges and highlighting the potential limitations of such approaches [58,106,107]. The development of vehicle automation and the emergent sharing economy in transportation is reshaping the interaction between public and private transport systems [108]. Although autonomous driving technology may enhance accessibility and travel experience, its negative effects on walking, cycling, and public transportation, as well as the substantial rise in demand for leisure travel, could undermine transportation sustainability. Furthermore, widespread adoption of autonomous vehicles could potentially lead to increased energy consumption and carbon emissions, adversely affecting urban sustainability [109].
The impact of land transportation planning on the accessibility, safety, and smart mobility of autonomous vehicles was found to be insignificant (i.e., H4, H5, and H6 are not supported). This contrasts with earlier studies, such as Curtis [110], who argued that land use planning and transportation planning are closely intertwined, collectively shaping urban transportation networks and service structures, thereby influencing autonomous vehicle accessibility. These findings suggest that autonomous vehicles could potentially impact land development by optimizing routes and concentrating parking facilities, unlocking high-value urban spaces and altering urban land use [76].
In the context of our study, the lack of a significant impact from land transportation planning on autonomous vehicle accessibility may stem from the peripheral development of urban areas driven by autonomous vehicle technology, which contributes to the dispersion of travel distances [111]. Autonomous vehicles (AVs) can reduce parking demand in congested urban areas, freeing up space for residential and other developments, potentially fueling further urban sprawl [112]. The dilution of population density and the spread of mobility-based residential patterns weaken the accessibility of AVs spatially.
The influence of land transportation planning on the safety of autonomous vehicles was also found to be insignificant (i.e., H5 is not supported). Discrepancies with previous findings may be attributed to differences in sample characteristics. The participants in this study were drawn from regions where land transportation planning may not have fully addressed the specific requirements of autonomous vehicles (e.g., dedicated lanes and intelligent traffic systems). In contrast, some advanced cities have optimized their land transportation planning for AVs, significantly improving their safety [113]. The safety of autonomous vehicles depends not only on land transportation planning but also on the maturity of the technology and the extent of policy support. In this study, AV technology may not yet be sufficiently mature, and policy support may be lacking, contributing to the absence of a significant impact from land transportation planning.
The lack of significant influence from land transportation planning on the smart mobility of autonomous vehicles (i.e., H6 is not supported) contrasts with earlier research, which suggests that effective urban design and the optimization of multimodal networks through digital technologies improve connectivity and reduce mobility externalities by integrating social norms [114]. This study’s sample primarily comes from areas where autonomous vehicles have not yet been widely deployed, meaning user awareness and acceptance of AVs may be low. Consequently, the impact of land transportation planning on smart mobility has not yet materialized in these regions. In contrast, existing studies often focus on areas where AV technology is more mature, where the influence of land transportation planning is more pronounced.
The absence of significant effects of land transportation planning on the accessibility, safety, and smart mobility of autonomous vehicles underscores the need for land use policies to evolve in tandem with technological advancements. However, land use patterns often lag behind policy development, while autonomous driving technology is advancing rapidly and diversifying. Urban planners must closely monitor trends in AV technology, adapt transportation strategies accordingly, and explore the impacts of AVs on traffic flow and land use patterns. This proactive approach will help optimize existing transportation systems, enhance their efficiency, and mitigate potential negative consequences as autonomous vehicles become increasingly prevalent [14].
Vehicle management measures significantly impact the accessibility, safety, and smart mobility dimensions of urban citizens’ perceptions (supporting H7, H8, and H9). The effective regulation of dynamic vehicle information is crucial for interconnected and autonomous vehicles, as automation and connectivity can change mobility patterns. Vehicle-to-vehicle (V2V) communication allows for the coordination of multiple vehicles, enabling them to exchange status information and reduce travel time. Connectivity also supports numerous services and features, including emergency calls, tolls, and infotainment, all of which contribute to increased safety, performance, and vehicle cooperation [115,116].
The range of service point support significantly impacts the accessibility and smart mobility perceptions of urban citizens (supporting H10 and H12). Service points such as charging stations, maintenance centers, and technical support facilities provide essential infrastructure for autonomous vehicle operation. As noted earlier, autonomous vehicles incorporate smart mobility, with the public’s access to real-time information about vehicle operations playing a key role [48]. There is a natural synergy between autonomous and electric vehicles, as the “smar”. nature of autonomous technology helps address the limitations of current non-autonomous electric vehicles, including range, charging station density, and charging time management. Research has shown that smart fleet management for autonomous vehicles, which accurately predicts travel demand and optimizes the location of charging stations, can make smart mobility more accessible [117]. This synergy not only enhances the convenience of smart mobility but also profoundly impacts citizens’ perceptions of service point accessibility.
The impact of service point support on citizens’ perceptions of safety was not significant (H11 not supported). This is unexpected, as the service point network ensures that autonomous vehicles can receive support in the event of malfunctions or maintenance needs. Autonomous vehicles may face technical failures or human–machine interaction issues, including the standardization of AI systems for safety. Due to the complexity of autonomous vehicles, complete testing may not be possible [118]. As a result, the construction of service points may not be fully implemented, and during the trial operation phase, service coverage might not extend to all urban areas, leading to some residents being unable to access service point support. Even if service points are present, the quality of services may be limited, failing to meet all safety needs. To improve citizens’ perceptions of safety, governments and social institutions need to consider these factors and take effective measures to strengthen the construction and quality of service points, improving public awareness and trust in safety.
Vehicle deployment distribution significantly impacts the accessibility, safety, and smart mobility perceptions of urban citizens (supporting H13, H14, and H15). Autonomous vehicles are capable of performing transportation tasks such as movement and braking without human control [56]. Studies have shown that autonomous vehicles equipped with in-vehicle communication systems can exchange information with surrounding vehicles (e.g., traffic conditions and road conditions), enhancing safety [78]. Compared to traditional vehicles, autonomous vehicles do not require human intervention and can significantly reduce traffic accidents caused by human error [17].
6. Conclusions and Limitations
6.1. Theoretical Contributions
This study applies policy planning governance to the shaping of urban transportation sustainability influenced by autonomous vehicles. Few studies have explored the potential of using policy planning governance to shape urban transportation sustainability in the context of autonomous vehicles. By incorporating the dimensions of policy planning governance and citizen perceptions, this research provides a multidimensional analysis of the factors influencing urban transportation sustainability. This new perspective, combined with the traditional technological viewpoint, offers a more comprehensive framework for understanding the macro and micro aspects of implementing autonomous vehicles in shaping urban transportation sustainability. This study provides new insights into transportation sustainability and supports traffic flow from the perspectives of regulatory mechanisms and urban planning.
6.2. Practical Significance
This study offers valuable insights and recommendations for urban transportation departments on policy planning for autonomous vehicles. The integration of autonomous vehicles into urban transportation holds the potential for future sustainable development. The findings can help transportation planning departments make more effective decisions regarding land transportation planning and the regulation of autonomous vehicles. The following recommendations are provided.
Based on data analysis results, the transportation department should promote successful smart city cases through public network video campaigns to increase public awareness and participation. During the implementation phase, the government should strengthen policy guidance and support, increase R&D investment, improve infrastructure, and enhance public awareness and acceptance.
Urban transportation departments should focus on vehicle distribution, vehicle management measures, and efficient road utilization to optimize the transportation system, enhance traffic efficiency, and contribute to energy conservation and environmental protection. To implement vehicle distribution, a central vehicle dispatch system should be established to allocate autonomous vehicles based on different traffic periods and user needs.
The coverage of autonomous vehicle service points should be improved by optimizing vehicle routes and station layouts. Service points should be added in high-demand areas based on regional traffic needs and population density. Maintenance stations and repair facilities should be expanded to reduce the risk of traffic accidents due to vehicle malfunctions and ensure that autonomous vehicles are effectively integrated into the public transportation network, improving citizens’ safety perceptions.
6.3. Limitations and Future Research
- (a)
- Geographic Scope Limitation: The survey was conducted only in certain cities in China. Autonomous vehicle pilot cities in China are limited, primarily concentrated in first-tier cities with high levels of infrastructure, regulatory support, and industry development, which may not represent the transportation levels of all cities in China.
- (b)
- External Variables Limitation: The conditions of autonomous vehicle pilot cities vary, influencing citizens’ subjective evaluations of the technology. Public perceptions can differ depending on road conditions, traffic signs, lane markings, and other factors.
- (c)
- Sample Limitation: The survey predominantly attracted younger participants, especially those aged 18–35. Younger people are more accepting of emerging transportation technologies and show greater enthusiasm for autonomous vehicles. However, the sample may not fully represent the entire population, and future research should aim for a more balanced age distribution to capture a wider range of attitudes and mobility characteristics.
Although autonomous vehicle pilot cities are crucial, they face several challenges such as regional development disparities, limited regulatory scope, and high testing costs. Future research should further enhance inter-regional cooperation and address public acceptance of autonomous vehicles, focusing on education and awareness campaigns. Policymakers need to enhance public understanding of autonomous vehicle technology’s principles, safety, and convenience and ensure its responsiveness in emergency situations to build trust and improve public acceptance.
Author Contributions
Conceptualization, D.L. and K.L.; Methodology, K.L.; Software, K.L.; Resources, K.L.; Data curation, Writing—review and editing, D.L.; Supervision, K.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
The study was conducted in accordance with the Declaration of Helsinki and approved by Jiangnan University Ethics Committee (protocol code: JNU202501IRB001 and date of 6 January 2025 approval).
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
The data that support the findings of this study are available from the corresponding author upon reasonable request.
Acknowledgments
We would like to thank Jiangnan University Ethics Committee for providing the equipment and technical support for this research.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Moody, J.; Farr, E.; Papagelis, M.; Keith, D.R. The value of car ownership and use in the United States. Nat. Sustain. 2021, 4, 769–774. [Google Scholar] [CrossRef]
- Schrank, D.; Lomax, T.; Turner, S. TTI’s 2010 Urban Mobility Report. 2010. Available online: https://static.tti.tamu.edu/tti.tamu.edu/documents/umr/archive/mobility-report-2010.pdf (accessed on 1 February 2025).
- Ceder, A. Urban mobility and public transport: Future perspectives and review. Int. J. Urban Sci. 2021, 25, 455–479. [Google Scholar] [CrossRef]
- Lerner, W.; Audenhove, V.F. The future of urban mobility: Towards networked, multimodal cities in 2050. In Public Transport International; International Association of Public Transport (UITP): Brussels, Belgium, 2012. [Google Scholar]
- Lomax, T.; Turner, S.; Eisele, B.; Schrank, D.; Geng, L.; Shollar, B. Refining the Real-Timed Urban Mobility Report; Texas Transportation Institute, University Transportation Center for Mobility: Bryan, TX, USA, 2012. [Google Scholar]
- Carroll, P.; Caulfield, B.; Ahern, A. Measuring the potential emission reductions from a shift towards public transport. Transp. Res. Part D Transp. Environ. 2019, 73, 338–351. [Google Scholar] [CrossRef]
- Thorhauge, M.; Jensen, A.F.; Rich, J. Effects of autonomous first-and last mile transport in the transport chain. Transp. Res. Interdiscip. Perspect. 2022, 15, 100623. [Google Scholar] [CrossRef]
- Krueger, R.; Rashidi, T.H.; Dixit, V.V. Autonomous driving and residential location preferences: Evidence from a stated choice survey. Transp. Res. Part C Emerg. Technol. 2019, 108, 255–268. [Google Scholar] [CrossRef]
- Makahleh, H.Y.; Ferranti, E.J.S.; Dissanayake, D. Assessing the Role of Autonomous Vehicles in Urban Areas: A Systematic Review of Literature. Future Transp. 2024, 4, 321–348. [Google Scholar] [CrossRef]
- Shafiei, S.; Gu, Z.; Grzybowska, H.; Cai, C. Impact of self-parking autonomous vehicles on urban traffic congestion. Transportation 2023, 50, 183–203. [Google Scholar] [CrossRef]
- Yi, Z.; Smart, J.; Shirk, M. Energy impact evaluation for eco-routing and charging of autonomous electric vehicle fleet: Ambient temperature consideration. Transp. Res. Part C Emerg. Technol. 2018, 89, 344–363. [Google Scholar] [CrossRef]
- Duarte, F.; Ratti, C. The impact of autonomous vehicles on cities: A review. J. Urban Technol. 2018, 25, 3–18. [Google Scholar] [CrossRef]
- Singh, J. Autonomous Vehicles and Smart Cities: Integrating AI to Improve Traffic Flow, Parking, and Environmental Impact. J. AI-Assist. Sci. Discov. 2024, 4, 65–105. [Google Scholar]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Chan, C.-Y. Advancements, prospects, and impacts of automated driving systems. Int. J. Transp. Sci. Technol. 2017, 6, 208–216. [Google Scholar] [CrossRef]
- Richter, M.A.; Hagenmaier, M.; Bandte, O.; Parida, V.; Wincent, J. Smart cities, urban mobility and autonomous vehicles: How different cities needs different sustainable investment strategies. Technol. Forecast. Soc. Change 2022, 184, 121857. [Google Scholar] [CrossRef]
- Anderson, J.M.; Nidhi, K.; Stanley, K.D.; Sorensen, P.; Samaras, C.; Oluwatola, O.A. Autonomous Vehicle Technology: A Guide for Policymakers; Rand Corporation: Santa Monica, CA, USA, 2014. [Google Scholar]
- Folsom, T.C. Energy and autonomous urban land vehicles. IEEE Technol. Soc. Mag. 2012, 31, 28–38. [Google Scholar] [CrossRef]
- Alessandrini, A.; Cattivera, A.; Holguin, C.; Stam, D. CityMobil2: Challenges and opportunities of fully automated mobility. In Road Vehicle Automation; Springer: Berlin/Heidelberg, Germany, 2014; pp. 169–184. [Google Scholar]
- Acheampong, R.A.; Cugurullo, F.; Gueriau, M.; Dusparic, I. Can autonomous vehicles enable sustainable mobility in future cities? Insights and policy challenges from user preferences over different urban transport options. Cities 2021, 112, 103134. [Google Scholar] [CrossRef]
- Grindsted, T.S.; Christensen, T.H.; Freudendal-Pedersen, M.; Friis, F.; Hartmann-Petersen, K. The urban governance of autonomous vehicles–In love with AVs or critical sustainability risks to future mobility transitions. Cities 2022, 120, 103504. [Google Scholar] [CrossRef]
- Legacy, C.; Ashmore, D.; Scheurer, J.; Stone, J.; Curtis, C. Planning the driverless city. Transp. Rev. 2019, 39, 84–102. [Google Scholar] [CrossRef]
- Mo, B.; Cao, Z.; Zhang, H.; Shen, Y.; Zhao, J. Competition between shared autonomous vehicles and public transit: A case study in Singapore. Transp. Res. Part C Emerg. Technol. 2021, 127, 103058. [Google Scholar] [CrossRef]
- Gerla, M.; Lee, E.-K.; Pau, G.; Lee, U. Internet of vehicles: From intelligent grid to autonomous cars and vehicular clouds. In Proceedings of the 2014 IEEE World Forum on Internet of Things (WF-IoT), Seoul, Republic of Korea, 6–8 March 2014; IEEE: New York, NY, USA, 2014. [Google Scholar]
- Fafoutellis, P.; Mantouka, E.G. Major limitations and concerns regarding the integration of autonomous vehicles in urban transportation systems. In Proceedings of the Data Analytics: Paving the Way to Sustainable Urban Mobility: Proceedings of 4th Conference on Sustainable Urban Mobility (CSUM2018), Skiathos Island, Greece, 24–25 May 2019; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Iravani, H.; Anderson, A.; Bevan, A. Autonomous vehicles: Rethinking traffic congestion solutions in cities. J. Geotech. Transp. Eng. 2018, 4, 25–29. [Google Scholar]
- Docherty, I.; Marsden, G.; Anable, J. The governance of smart mobility. Transp. Res. Part A Policy Pract. 2018, 115, 114–125. [Google Scholar] [CrossRef]
- Golbabaei, F.; Yigitcanlar, T.; Bunker, J. The role of shared autonomous vehicle systems in delivering smart urban mobility: A systematic review of the literature. Int. J. Sustain. Transp. 2021, 15, 731–748. [Google Scholar] [CrossRef]
- Lyons, G. Getting smart about urban mobility–aligning the paradigms of smart and sustainable. Transp. Res. Part A Policy Pract. 2018, 115, 4–14. [Google Scholar] [CrossRef]
- Kyriakidis, M.; Sodnik, J.; Stojmenova, K.; Elvarsson, A.B.; Pronello, C.; Thomopoulos, N. The role of human operators in safety perception of av deployment—Insights from a large european survey. Sustainability 2020, 12, 9166. [Google Scholar] [CrossRef]
- Seilabi, S.E.; Tabesh, M.T.; Davatgari, A.; Miralinaghi, M.; Labi, S. Promoting autonomous vehicles using travel demand and lane management strategies. Front. Built Environ. 2020, 6, 560116. [Google Scholar] [CrossRef]
- Clark, B.; Parkhurst, G.; Ricci, M. In The potential impact of autonomous vehicles on transport systems and society: A review and future prospects. In Proceedings of the 48th Universities’ Transport Studies Group Conference, Bristol, UK, 6–8 January 2016. [Google Scholar]
- Enoch, M.P. How a rapid modal convergence into a universal automated taxi service could be the future for local passenger transport. Technol. Anal. Strateg. Manag. 2015, 27, 910–924. [Google Scholar] [CrossRef]
- Fox, S.J. Planning for density in a driverless world. NEULJ 2017, 9, 151. [Google Scholar] [CrossRef][Green Version]
- Arowolo, W.; Larsson, M.; Nicolaï, I. Governance of automated vehicle in the urban transport system: Insight from a willingness-to-use survey and norwegian cultural context. Transp. Res. Interdiscip. Perspect. 2024, 24, 101040. [Google Scholar] [CrossRef]
- Brückmann, G.; Bernauer, T. What drives public support for policies to enhance electric vehicle adoption? Environ. Res. Lett. 2020, 15, 094002. [Google Scholar] [CrossRef]
- Yigitcanlar, T.; Kamruzzaman, M. Smart cities and mobility: Does the smartness of Australian cities lead to sustainable commuting patterns? In Smart Cities and Innovative Urban Technologies; Routledge: London, UK, 2020; pp. 21–46. [Google Scholar]
- Orieno, O.H.; Ndubuisi, N.L.; Ilojianya, V.I.; Biu, P.W.; Odonkor, B. The future of autonomous vehicles in the US urban landscape: A review: Analyzing implications for traffic, urban planning, and the environment. Eng. Sci. Technol. J. 2024, 5, 43–64. [Google Scholar] [CrossRef]
- Kamruzzaman, M.; Hine, J.; Yigitcanlar, T. Investigating the link between carbon dioxide emissions and transport-related social exclusion in rural Northern Ireland. Int. J. Environ. Sci. Technol. 2015, 12, 3463–3478. [Google Scholar] [CrossRef]
- Yigitcanlar, T.; Kamruzzaman, M. Investigating the interplay between transport, land use and the environment: A review of the literature. Int. J. Environ. Sci. Technol. 2014, 11, 2121–2132. [Google Scholar] [CrossRef]
- Greenblatt, J.B.; Shaheen, S. Automated vehicles, on-demand mobility, and environmental impacts. Curr. Sustain. Renew. Energy Rep. 2015, 2, 74–81. [Google Scholar] [CrossRef]
- Lam, D.; Head, P. Sustainable urban mobility. In Energy, Transport, & the Environment: Addressing the Sustainable Mobility Paradigm; Springer: Berlin/Heidelberg, Germany, 2012; pp. 359–371. [Google Scholar]
- Podgórniak-Krzykacz, A.; Trippner-Hrabi, J. Motives and factors that determine city residents’ use of public bicycles. The case of lodz, poland. Case Stud. Transp. Policy 2021, 9, 651–662. [Google Scholar] [CrossRef]
- Alavi, A.H.; Jiao, P.; Buttlar, W.G.; Lajnef, N. Internet of Things-enabled smart cities: State-of-the-art and future trends. Measurement 2018, 129, 589–606. [Google Scholar] [CrossRef]
- Commission, E. Together Towards Competitive and Resource-Efficient Urban Mobility; European Commission: Brussels, Belgium, 2013. [Google Scholar]
- Agriesti, S.; Brevi, F.; Gandini, P.; Marchionni, G.; Parmar, R.; Ponti, M.; Studer, L. Impact of driverless vehicles on urban environment and future mobility. Transp. Res. Procedia 2020, 49, 44–59. [Google Scholar] [CrossRef]
- Hasrouny, H.; Samhat, A.E.; Bassil, C.; Laouiti, A. Vanet security challenges and solutions: A survey. Veh. Commun. 2017, 7, 7–20. [Google Scholar] [CrossRef]
- Manville, C.; Cochrane, G.; Cave, J.; Millard, J.; Pederson, J.K.; Thaarup, R.K.; Liebe, A.; Wissner, M.; Massink, R.; Kotterink, B. Mapping Smart Cities in the EU; Directorate General for Internal Policies; European Parliament: Brussels, Belgium, 2014. [Google Scholar]
- Othman, K. Exploring the implications of autonomous vehicles: A comprehensive review. Innov. Infrastruct. Solut. 2022, 7, 165. [Google Scholar] [CrossRef]
- Tokody, D.; Mezei, I.J.; Schuster, G. An overview of autonomous intelligent vehicle systems. In Vehicle and Automotive Engineering: Proceedings of the JK2016, Miskolc, Hungary; Springer: Berlin/Heidelberg, Germany, 2017; pp. 287–307. [Google Scholar]
- Jo, K.; Sunwoo, M. Generation of a precise roadway map for autonomous cars. IEEE Trans. Intell. Transp. Syst. 2013, 15, 925–937. [Google Scholar] [CrossRef]
- Pozna, C.; Antonya, C. Issues about autonomous cars. In Proceedings of the 2016 IEEE 11th International Symposium on Applied Computational Intelligence and Informatics (SACI), Timisoara, Romania, 12–14 May 2016; IEEE: New York, NY, USA, 2016. [Google Scholar]
- Giannaros, A.; Karras, A.; Theodorakopoulos, L.; Karras, C.; Kranias, P.; Schizas, N.; Kalogeratos, G.; Tsolis, D. Autonomous vehicles: Sophisticated attacks, safety issues, challenges, open topics, blockchain, and future directions. J. Cybersecur. Priv. 2023, 3, 493–543. [Google Scholar] [CrossRef]
- Cui, J.; Liew, L.S.; Sabaliauskaite, G.; Zhou, F. A review on safety failures, security attacks, and available countermeasures for autonomous vehicles. Ad Hoc Netw. 2019, 90, 101823. [Google Scholar] [CrossRef]
- Engoulou, R.G.; Bellaïche, M.; Pierre, S.; Quintero, A. Vanet security surveys. Comput. Commun. 2014, 44, 1–13. [Google Scholar] [CrossRef]
- Lozano-Perez, T. Autonomous Robot Vehicles; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Tokody, D.; Holicza, P.; Schuster, G. The smart mobility aspects of intelligent railway. In Proceedings of the 2016 IEEE 11th International Symposium on Applied Computational Intelligence and Informatics (SACI), Timisoara, Romania, 12–14 May 2016; IEEE: New York, NY, USA, 2016. [Google Scholar]
- Haarstad, H.; Wathne, M.W. Are smart city projects catalyzing urban energy sustainability? Energy Policy 2019, 129, 918–925. [Google Scholar] [CrossRef]
- Alawadhi, S.; Aldama-Nalda, A.; Chourabi, H.; Gil-Garcia, J.R.; Leung, S.; Mellouli, S.; Nam, T.; Pardo, T.A.; Scholl, H.J.; Walker, S. Building understanding of smart city initiatives. In Proceedings of the Electronic Government: 11th IFIP WG 8.5 International Conference, EGOV 2012, Kristiansand, Norway, 3–6 September 2012; Proceedings 11. Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Calvillo, C.F.; Sánchez-Miralles, A.; Villar, J. Energy management and planning in smart cities. Renew. Sustain. Energy Rev. 2016, 55, 273–287. [Google Scholar] [CrossRef]
- Kramers, A.; Höjer, M.; Lövehagen, N.; Wangel, J. Smart sustainable cities–Exploring ICT solutions for reduced energy use in cities. Environ. Model. Softw. 2014, 56, 52–62. [Google Scholar] [CrossRef]
- Ahvenniemi, H.; Huovila, A.; Pinto-Seppä, I.; Airaksinen, M. What are the differences between sustainable and smart cities? Cities 2017, 60, 234–245. [Google Scholar] [CrossRef]
- Van Audenhove, F.-J.; Korniichuk, O.; Dauby, L.; Pourbaix, J. The Future of Urban Mobility 2.0: Imperatives to Shape Extended Mobility Ecosystems of Tomorrow; The National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 2014. [Google Scholar]
- Kasraian, D.; Maat, K.; Van Wee, B. The impact of urban proximity, transport accessibility and policy on urban growth: A longitudinal analysis over five decades. Environ. Plan. B Urban Anal. City Sci. 2019, 46, 1000–1017. [Google Scholar] [CrossRef]
- Herala, N. Regulating traffic with land use planning. Sustain. Dev. 2003, 11, 91–102. [Google Scholar] [CrossRef]
- Alessandrini, A.; Campagna, A.; Delle Site, P.; Filippi, F.; Persia, L. Automated vehicles and the rethinking of mobility and cities. Transp. Res. Procedia 2015, 5, 145–160. [Google Scholar] [CrossRef]
- Zakharenko, R. Self-driving cars will change cities. Reg. Sci. Urban Econ. 2016, 61, 26–37. [Google Scholar] [CrossRef]
- Moreno, A.T.; Michalski, A.; Llorca, C.; Moeckel, R. Shared Autonomous Vehicles Effect on Vehicle-Km Traveled and Average Trip Duration. J. Adv. Transp. 2018, 2018, 8969353. [Google Scholar] [CrossRef]
- Zhang, W.; Guhathakurta, S. Residential location choice in the era of shared autonomous vehicles. J. Plan. Educ. Res. 2021, 41, 135–148. [Google Scholar] [CrossRef]
- Gopalakrishna, D.; Carlson, P.J.; Sweatman, P.; Raghunathan, D.; Brown, L.; Serulle, N.U. Impacts of Automated Vehicles on Highway Infrastructure; U.S. Department of Transportation: Washington, DC, USA, 2021.
- Westerman, H.; Black, J. Preparing for fully autonomous vehicles in Australian cities: Land-use planning—Adapting, transforming, and innovating. Sustainability 2024, 16, 5492. [Google Scholar] [CrossRef]
- Hossain, M.M.; Lima, M.R.A.; Zhou, H. Potential impacts of connected and autonomous vehicles on controlling criteria for road geometric design: A review. Transp. Res. Rec. 2024, 2678, 1128–1139. [Google Scholar] [CrossRef]
- Barriga, J.J.; Sulca, J.; León, J.L.; Ulloa, A.; Portero, D.; Andrade, R.; Yoo, S.G. Smart parking: A literature review from the technological perspective. Appl. Sci. 2019, 9, 4569. [Google Scholar] [CrossRef]
- Stoiber, T.; Schubert, I.; Hoerler, R.; Burger, P. Will consumers prefer shared and pooled-use autonomous vehicles? A stated choice experiment with swiss households. Transp. Res. Part D Transp. Environ. 2019, 71, 265–282. [Google Scholar] [CrossRef]
- Masoud, N.; Jayakrishnan, R. Autonomous or driver-less vehicles: Implementation strategies and operational concerns. Transp. Res. Part E Logist. Transp. Rev. 2017, 108, 179–194. [Google Scholar] [CrossRef]
- Zhang, W.; Guhathakurta, S.; Fang, J.; Zhang, G. Exploring the impact of shared autonomous vehicles on urban parking demand: An agent-based simulation approach. Sustain. Cities Soc. 2015, 19, 34–45. [Google Scholar] [CrossRef]
- Deveci, M.; Pamucar, D.; Gokasar, I. Fuzzy power heronian function based CoCoSo method for the advantage prioritization of autonomous vehicles in real-time traffic management. Sustain. Cities Soc. 2021, 69, 102846. [Google Scholar] [CrossRef]
- Papadimitratos, P.; De La Fortelle, A.; Evenssen, K.; Brignolo, R.; Cosenza, S. Vehicular communication systems: Enabling technologies, applications, and future outlook on intelligent transportation. IEEE Commun. Mag. 2009, 47, 84–95. [Google Scholar] [CrossRef]
- Shen, W.; Lopes, C. Managing autonomous mobility on demand systems for better passenger experience. In Proceedings of the International Conference on Principles and Practice of Multi-Agent Systems, Bertinoro, Italy, 26–30 October 2015; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Mastoi, M.S.; Zhuang, S.; Munir, H.M.; Haris, M.; Hassan, M.; Usman, M.; Bukhari, S.S.H.; Ro, J.-S. An in-depth analysis of electric vehicle charging station infrastructure, policy implications, and future trends. Energy Rep. 2022, 8, 11504–11529. [Google Scholar] [CrossRef]
- Menon, N.; Barbour, N.; Zhang, Y.; Pinjari, A.R.; Mannering, F. Shared autonomous vehicles and their potential impacts on household vehicle ownership: An exploratory empirical assessment. Int. J. Sustain. Transp. 2019, 13, 111–122. [Google Scholar] [CrossRef]
- Litman, T. Autonomous Vehicle Implementation Predictions; Victoria Transport Policy Institute: Victoria, BC, Canada, 2017. [Google Scholar]
- Meyer, J.; Becker, H.; Bösch, P.M.; Axhausen, K.W. Autonomous vehicles: The next jump in accessibilities? Res. Transp. Econ. 2017, 62, 80–91. [Google Scholar] [CrossRef]
- Mourad, A.; Puchinger, J.; Chu, C. Owning or sharing autonomous vehicles: Comparing different ownership and usage scenarios. Eur. Transp. Res. Rev. 2019, 11, 1–20. [Google Scholar] [CrossRef]
- Zhou, B.; Liu, T.; Ryan, C.; Wang, L.-e.; Zhang, D. The satisfaction of tourists using bicycle sharing: A structural equation model-the case of Hangzhou, China. J. Sustain. Tour. 2020, 28, 1063–1082. [Google Scholar] [CrossRef]
- Setthachotsombut, N.; Aunyawong, W.; Areerakulkan, N.; Kerdpitak, C.; Poolsawad, K.; Sritapanya, K.; Bounnaphol, C. Optimization of Thai-Lao cross border transportation via R9 route for Thai shippers. Uncertain Supply Chain Manag. 2022, 10, 1323–1330. [Google Scholar] [CrossRef]
- Xie, B.; An, Z.; Zheng, Y.; Li, Z. Incorporating transportation safety into land use planning: Pre-assessment of land use conversion effects on severe crashes in urban China. Appl. Geogr. 2019, 103, 1–11. [Google Scholar] [CrossRef]
- Chopdar, P.K.; Lytras, M.D.; Visvizi, A. Exploring factors influencing bicycle-sharing adoption in India: A UTAUT 2 based mixed-method approach. Int. J. Emerg. Mark. 2023, 18, 5109–5134. [Google Scholar] [CrossRef]
- Wang, Y.; Cao, M.; Liu, Y.; Ye, R.; Gao, X.; Ma, L. Public transport equity in shenyang: Using structural equation modelling. Res. Transp. Bus. Manag. 2022, 42, 100555. [Google Scholar] [CrossRef]
- Bhagat-Conway, M.W.; Mirtich, L.; Salon, D.; Harness, N.; Consalvo, A.; Hong, S. Subjective variables in travel behavior models: A Critical Review and Standardized Transport Attitude Measurement Protocol (STAMP). Transportation 2024, 51, 155–191. [Google Scholar] [CrossRef]
- Yang, W.; Han, S. Direct and Indirect Effects of Road Design Attributes on Traffic Safety. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=4807442 (accessed on 1 February 2025).
- Tanwar, R.; Agarwal, P.K. Analysis of the determinants of service quality in the multimodal public transport system of Bhopal city using structural equation modelling (SEM) and factor analysis. Expert Syst. Appl. 2024, 256, 124931. [Google Scholar] [CrossRef]
- Fornell, C.; Larcker, D.F. Evaluating structural equation models with unobservable variables and measurement error. J. Mark. Res. 1981, 18, 39–50. [Google Scholar] [CrossRef]
- Hair, J.F.; Sarstedt, M.; Ringle, C.M.; Mena, J.A. An assessment of the use of partial least squares structural equation modeling in marketing research. J. Acad. Mark. Sci. 2012, 40, 414–433. [Google Scholar] [CrossRef]
- Henseler, J.; Ringle, C.M.; Sarstedt, M. A new criterion for assessing discriminant validity in variance-based structural equation modeling. J. Acad. Mark. Sci. 2015, 43, 115–135. [Google Scholar] [CrossRef]
- Gold, A.H.; Malhotra, A.; Segars, A.H. Knowledge management: An organizational capabilities perspective. J. Manag. Inf. Syst. 2001, 18, 185–214. [Google Scholar] [CrossRef]
- Henseler, J.; Ringle, C.M.; Sarstedt, M. Using partial least squares path modeling in advertising research: Basic concepts and recent issues. In Handbook of Research on International Advertising; Edward Elgar Publishing: Cheltenham, UK, 2012. [Google Scholar]
- Hair, J.F.; Risher, J.J.; Sarstedt, M.; Ringle, C.M. When to use and how to report the results of PLS-SEM. Eur. Bus. Rev. 2019, 31, 2–24. [Google Scholar] [CrossRef]
- Henseler, J.; Ringle, C.M.; Sinkovics, R.R. The use of partial least squares path modeling in international marketing. In New Challenges to International Marketing; Emerald Group Publishing Limited: Bingley, UK, 2009; pp. 277–319. [Google Scholar]
- Cohen, J. Statistical Power Analysis for the Behavioral Sciences; hillsdale [etc.]; Lawrence Erlbaum Associates, Cop.: Mahwah, NJ, USA, 1988. [Google Scholar]
- Hansson, S.O.; Belin, M.-Å.; Lundgren, B. Self-driving vehicles—An ethical overview. Philos. Technol. 2021, 34, 1383–1408. [Google Scholar] [CrossRef]
- Voege, T.; Zhivov, N. Cooperative mobility systems and automated driving. In Proceedings of the Summary and Conclusions of the ITF Roundtable on Cooperative Mobility Systems and Automated Driving, Ottawa, ON, Canada, 6–7 December 2016; pp. 6–7. [Google Scholar]
- Howard, D.; Dai, D. Public perceptions of self-driving cars: The Case of Berkeley, California. In Proceedings of the Transportation Research Board 93rd Annual Meeting, Washington, DC, USA, 12–16 January 2014; The National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA,, 2014. [Google Scholar]
- Lee, G.; Joo, S.; Oh, C.; Choi, K. An evaluation framework for traffic calming measures in residential areas. Transp. Res. Part D Transp. Environ. 2013, 25, 68–76. [Google Scholar] [CrossRef]
- Eppenberger, N.; Richter, M.A. The opportunity of shared autonomous vehicles to improve spatial equity in accessibility and socio-economic developments in european urban areas. Eur. Transp. Res. Rev. 2021, 13, 32. [Google Scholar] [CrossRef]
- Martin, C.J.; Evans, J.; Karvonen, A. Smart and sustainable? Five tensions in the visions and practices of the smart-sustainable city in Europe and North America. Technol. Forecast. Soc. Change 2018, 133, 269–278. [Google Scholar] [CrossRef]
- March, H.; Ribera-Fumaz, R. Smart contradictions: The politics of making Barcelona a Self-sufficient city. Eur. Urban Reg. Stud. 2016, 23, 816–830. [Google Scholar] [CrossRef]
- Faisal, A.; Yigitcanlar, T.; Kamruzzaman, M.; Paz, A. Mapping two decades of autonomous vehicle research: A systematic scientometric analysis. J. Urban Technol. 2021, 28, 45–74. [Google Scholar] [CrossRef]
- Massar, M.; Reza, I.; Rahman, S.M.; Abdullah, S.M.H.; Jamal, A.; Al-Ismail, F.S. Impacts of autonomous vehicles on greenhouse gas emissions—Positive or negative? Int. J. Environ. Res. Public Health 2021, 18, 5567. [Google Scholar] [CrossRef]
- Curtis, C. Planning for sustainable accessibility: The implementation challenge. Transp. Policy 2008, 15, 104–112. [Google Scholar] [CrossRef]
- Nadafianshahamabadi, R.; Tayarani, M.; Rowangould, G. A closer look at urban development under the emergence of autonomous vehicles: Traffic, land use and air quality impacts. J. Transp. Geogr. 2021, 94, 103113. [Google Scholar] [CrossRef]
- Stead, D.; Vaddadi, B. Automated vehicles and how they may affect urban form: A review of recent scenario studies. Cities 2019, 92, 125–133. [Google Scholar] [CrossRef]
- Chen, B.; Sun, D.; Zhou, J.; Wong, W.; Ding, Z. A future intelligent traffic system with mixed autonomous vehicles and human-driven vehicles. Inf. Sci. 2020, 529, 59–72. [Google Scholar] [CrossRef]
- Hamari, J.; Sjöklint, M.; Ukkonen, A. The sharing economy: Why people participate in collaborative consumption. J. Assoc. Inf. Sci. Technol. 2016, 67, 2047–2059. [Google Scholar] [CrossRef]
- Shladover, S.E. Path at 20—History and major milestones. IEEE Trans. Intell. Transp. Syst. 2007, 8, 584–592. [Google Scholar] [CrossRef]
- Shladover, S.E.; Desoer, C.A.; Hedrick, J.K.; Tomizuka, M.; Walrand, J.; Zhang, W.-B.; McMahon, D.H.; Peng, H.; Sheikholeslam, S.; McKeown, N. Automated vehicle control developments in the PATH program. IEEE Trans. Veh. Technol. 1991, 40, 114–130. [Google Scholar] [CrossRef]
- Chen, T.D.; Kockelman, K.M.; Hanna, J.P. Operations of a shared, autonomous, electric vehicle fleet: Implications of vehicle & charging infrastructure decisions. Transp. Res. Part A Policy Pract. 2016, 94, 243–254. [Google Scholar]
- Liu, L.; Lu, S.; Zhong, R.; Wu, B.; Yao, Y.; Zhang, Q.; Shi, W. Computing systems for autonomous driving: State of the art and challenges. IEEE Internet Things J. 2020, 8, 6469–6486. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).