
Wiring Network Diagnosis Using Reflectometry and Twin Support Vector Machines


Abstract
1. Introduction
2. Forward Model
3. Twin Support Vector Machines
- TWSVM 1:
- TWSVM 2:
- TWSVM 1:
- TWSVM 2:
4. Methodology
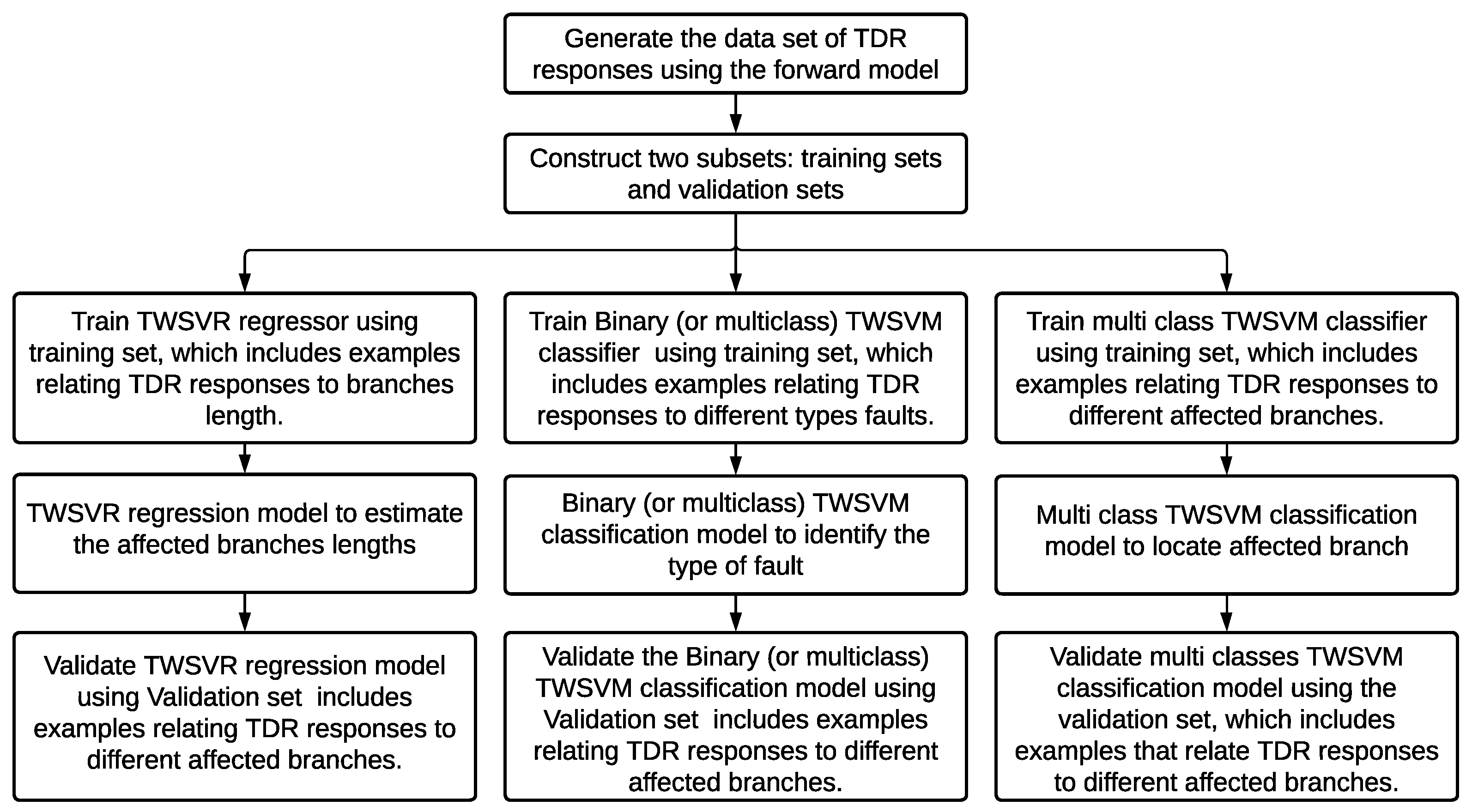
- A multiclass TWSVM classifier was formulated to determine the locations of affected branches. The dataset necessary for this multiclass TWSVM classification model comprises examples that relate TDR responses to various affected branches.
- Depending on the number of affected branches, a binary TWSVM classifier or multiclass TWSVM classifier is formulated to detect the type of fault:
- −
- In the case of the presence of only one fault in the wiring network under test, a binary TWSVM classier is sufficient to detect the type of the fault, which is either short circuit or open circuit
- −
- In the case of the presence of two or plus faults in the wiring network under test, a multiclass TWSVM classier is necessary to detect the type of the fault (short circuit faults, open circuit faults, or mix faults).
The dataset necessary for this binary or multiclass TWSVM classification model comprises examples that relate TDR responses to the fault types. - A TWSVR regressor is formulated to estimate the lengths of the affected branches. The dataset necessary for this TWSVR regressor model comprises examples that links TDR responses to branch lengths.
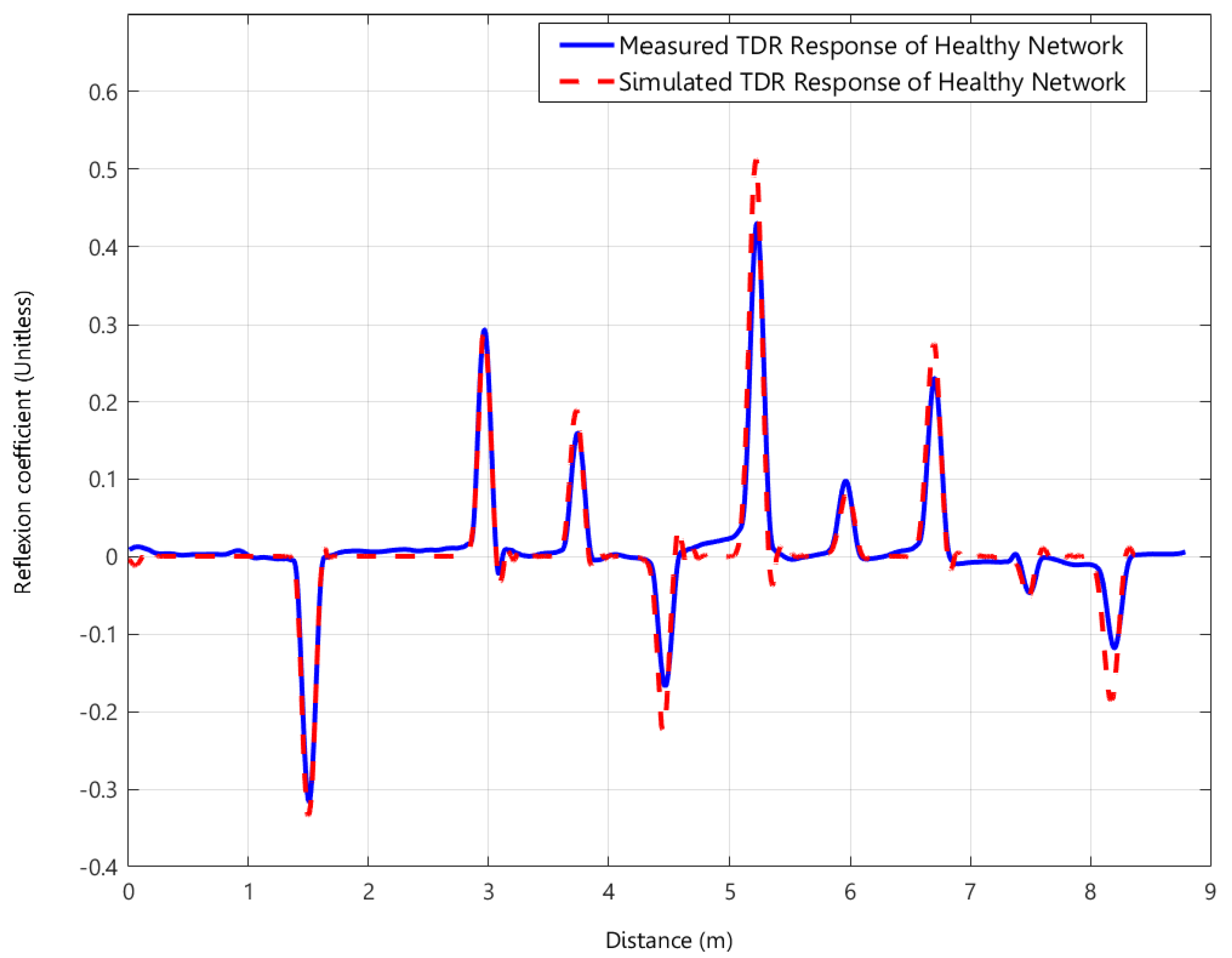
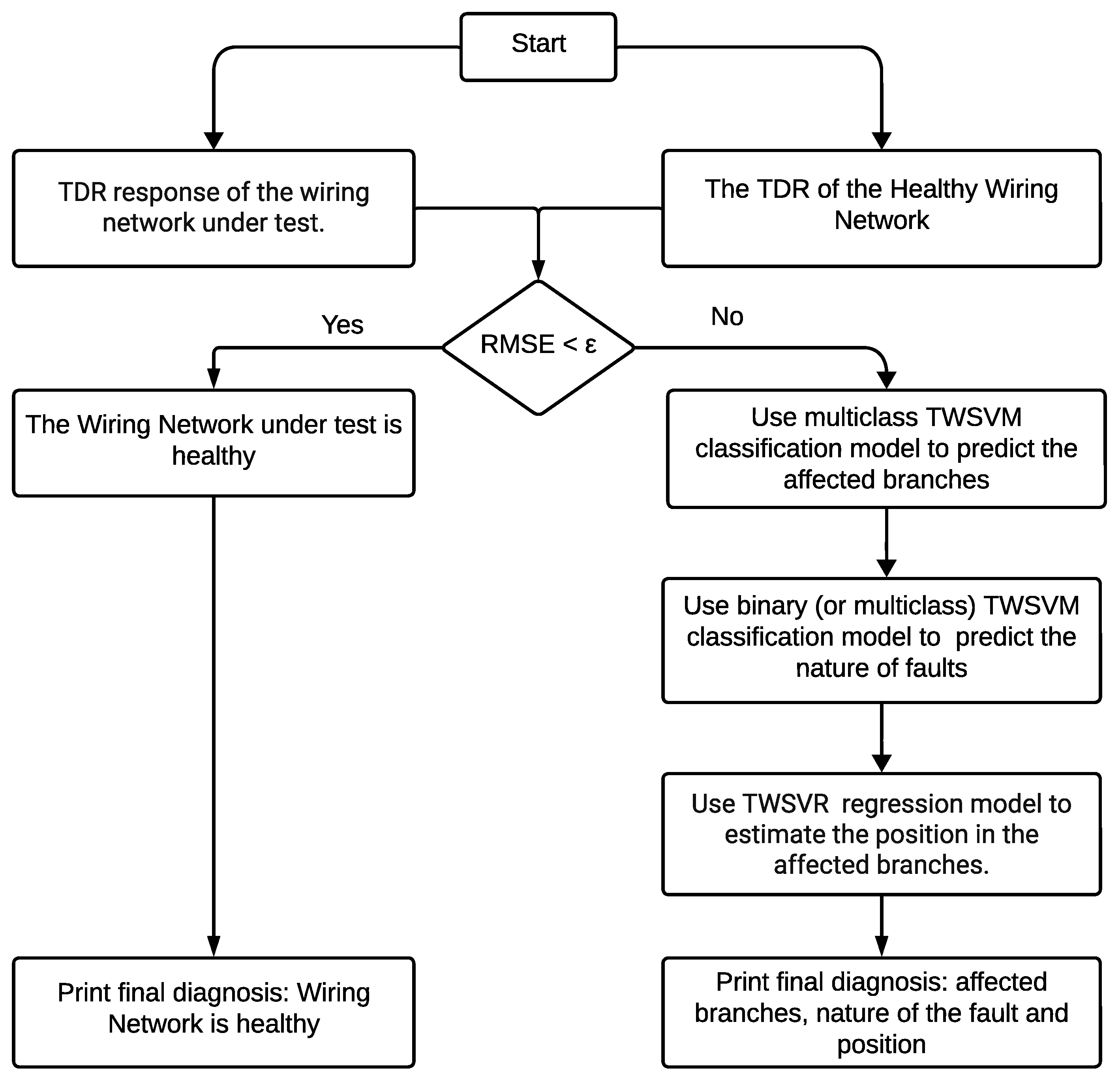
- In the detection stage, the TDR response from the WNUT, which is experimentally derived, is compared with a healthy network’s response (which is modeled forwardly). This comparison involve calculating the root mean square error (RMSE) between the WNUT’s response and that of a healthy network. If the RMSE falls below a predefined error threshold, the WNUT is deemed healthy; otherwise, it is considered compromised, prompting a progression to subsequent stages.
- The stages of localization and characterization involve (1) identifying the branches that are affected and ascertaining the type of faults and (2) estimating the lengths of these branches. The localization and characterization phases utilize the TWSVM classification and TWSVR models developed offline. Initially, the multiclass TWSVM classification model pinpoints the affected branches. Subsequently, the binary or multiclass TWSVM classification model determines the fault type. Lastly, the lengths of the impacted branches are estimated using the TWSVR model.
5. Numerical Results
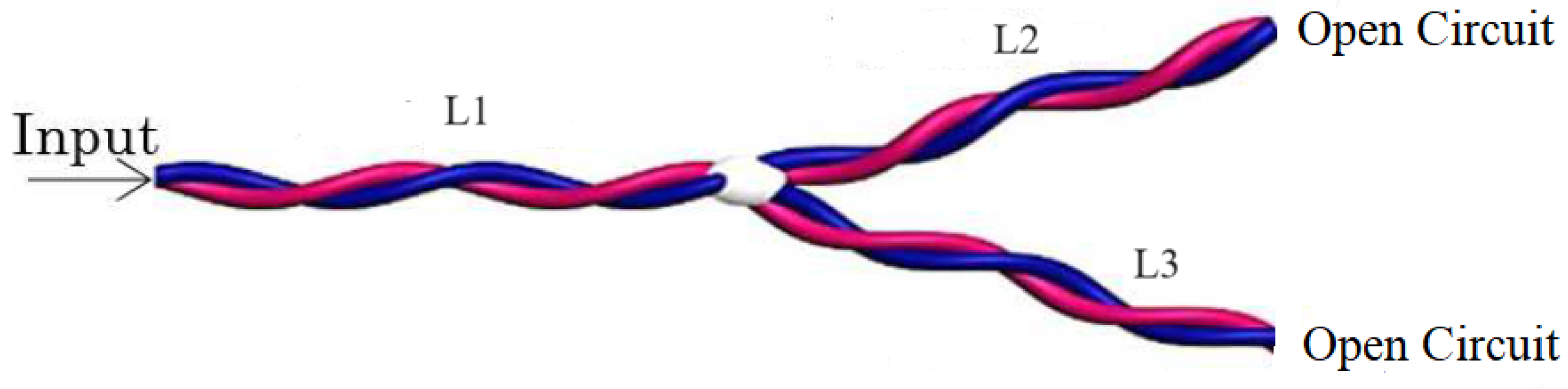
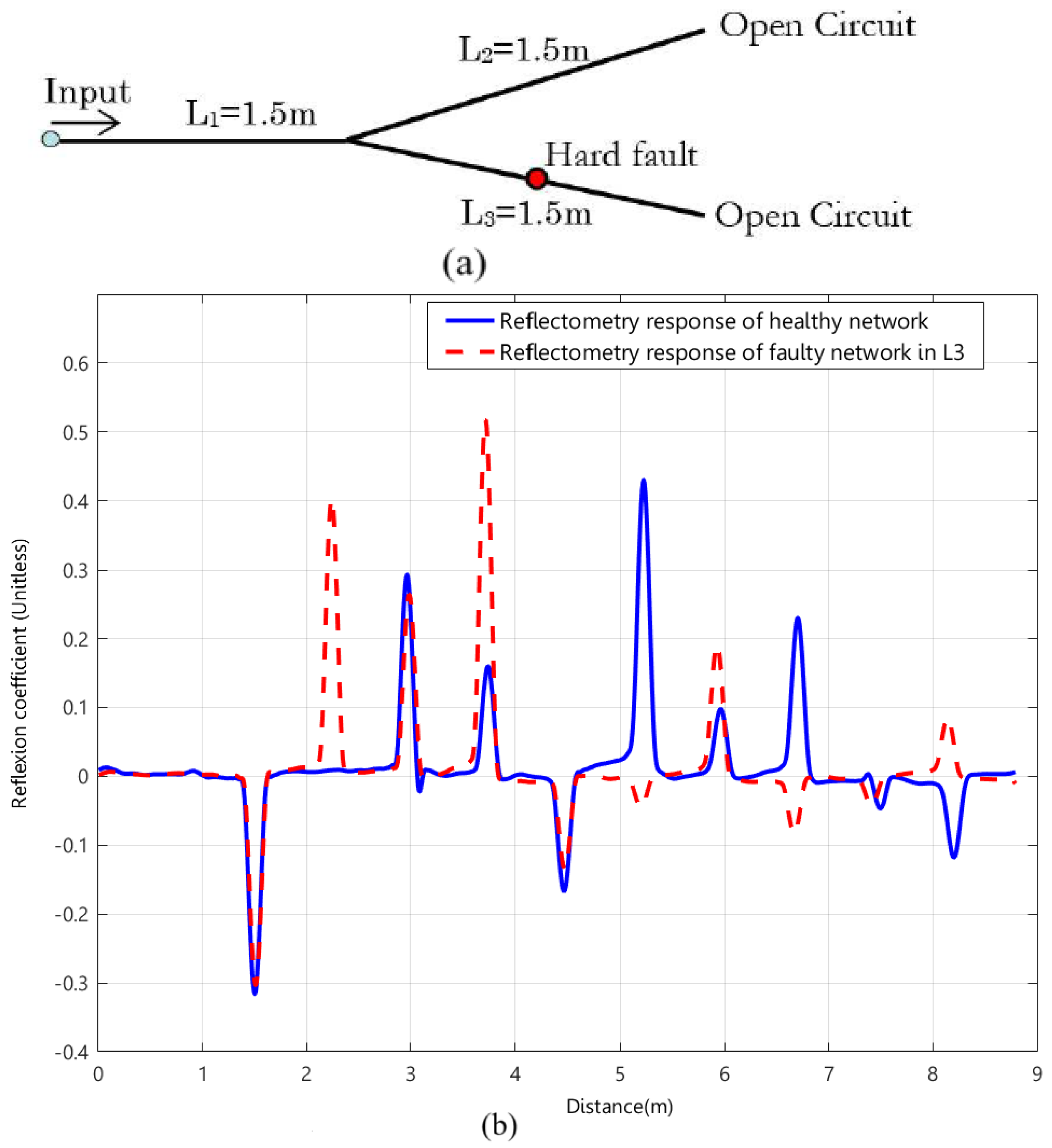
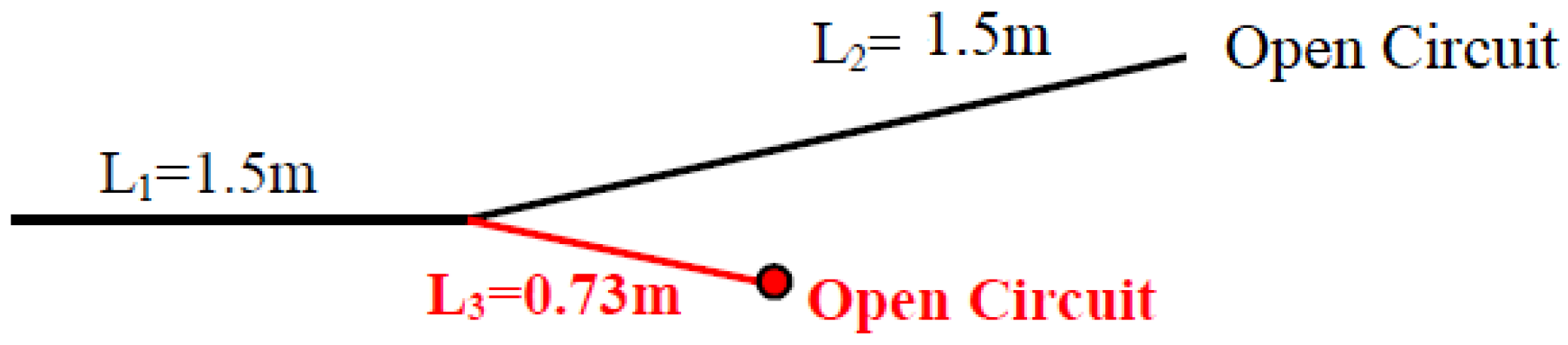
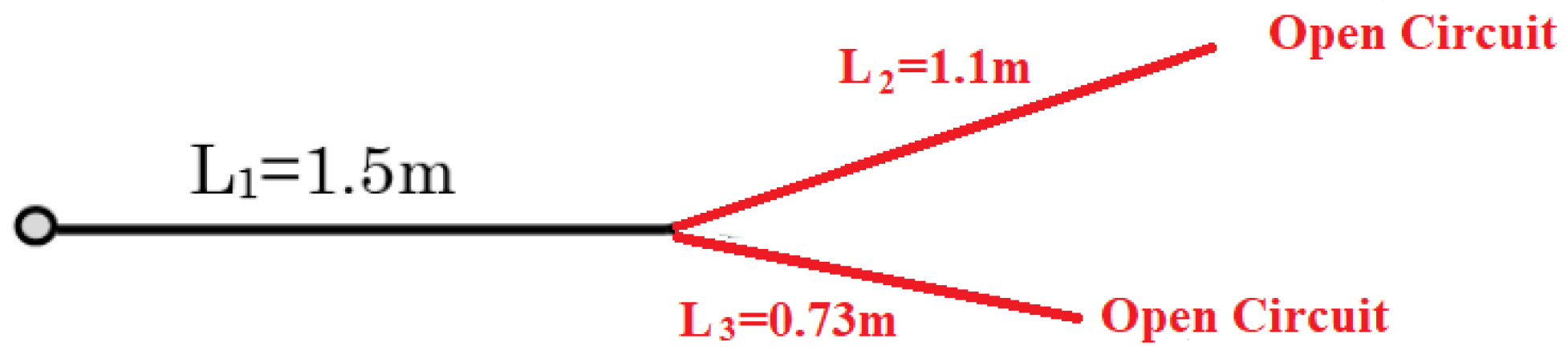
5.1. Diagnosis of a Y-Shaped Network Affected by One Hard Fault
5.1.1. Offline Training and Evaluation of TWSVM for the Classification
- Class 1: Indicates a hard fault on , with 170 labeled responses.
- Class 2: Indicates a hard fault on , with 60 labeled responses.
- Class 3: Indicates a hard fault on , with 60 labeled responses.
- Class 4: Indicates a hard fault on and , with 200 labeled responses.
5.1.2. Online Diagnosis of the WNUT
5.2. Diagnosis of the Y-Shaped Network Affected by Two Hard Faults
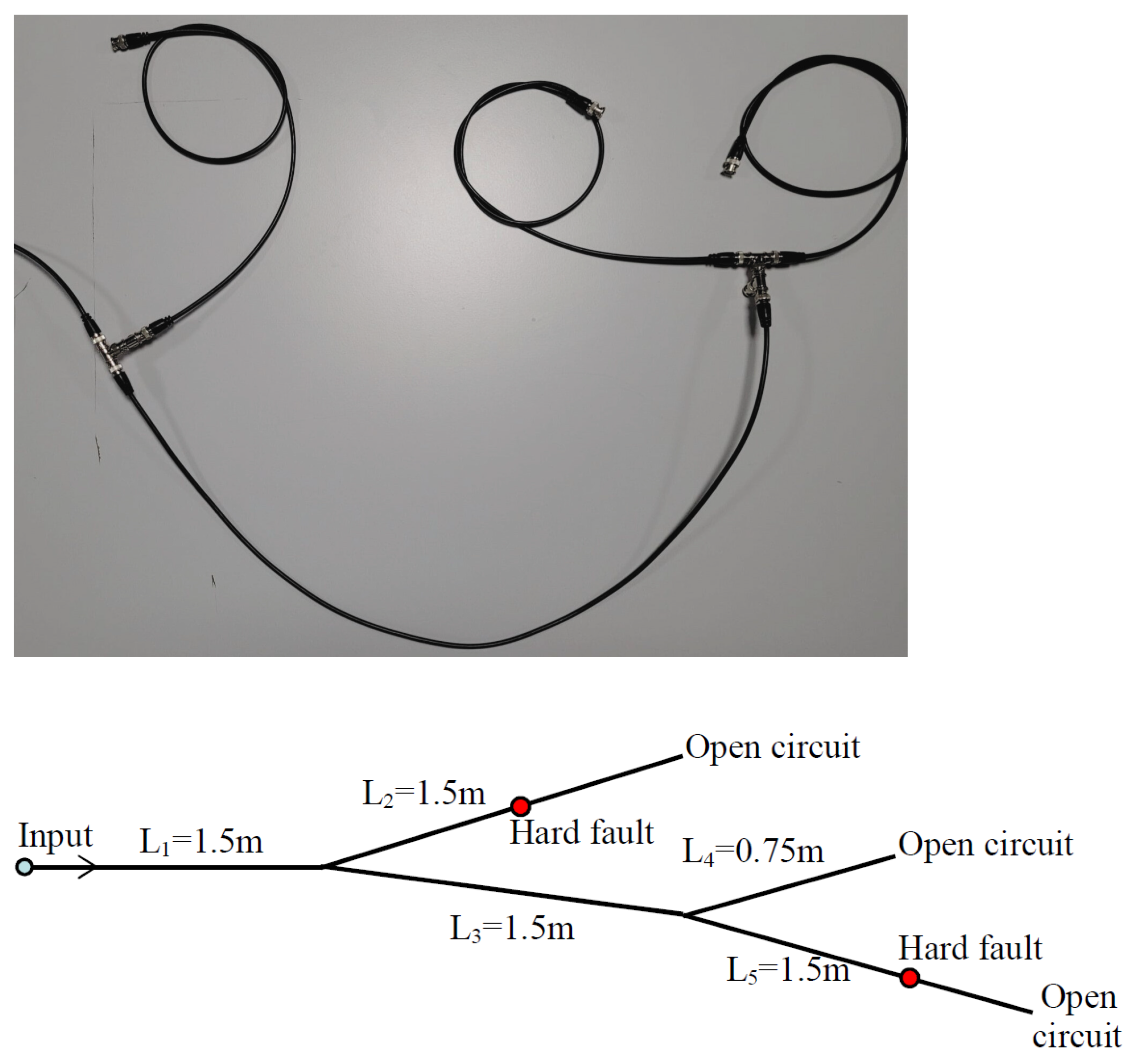
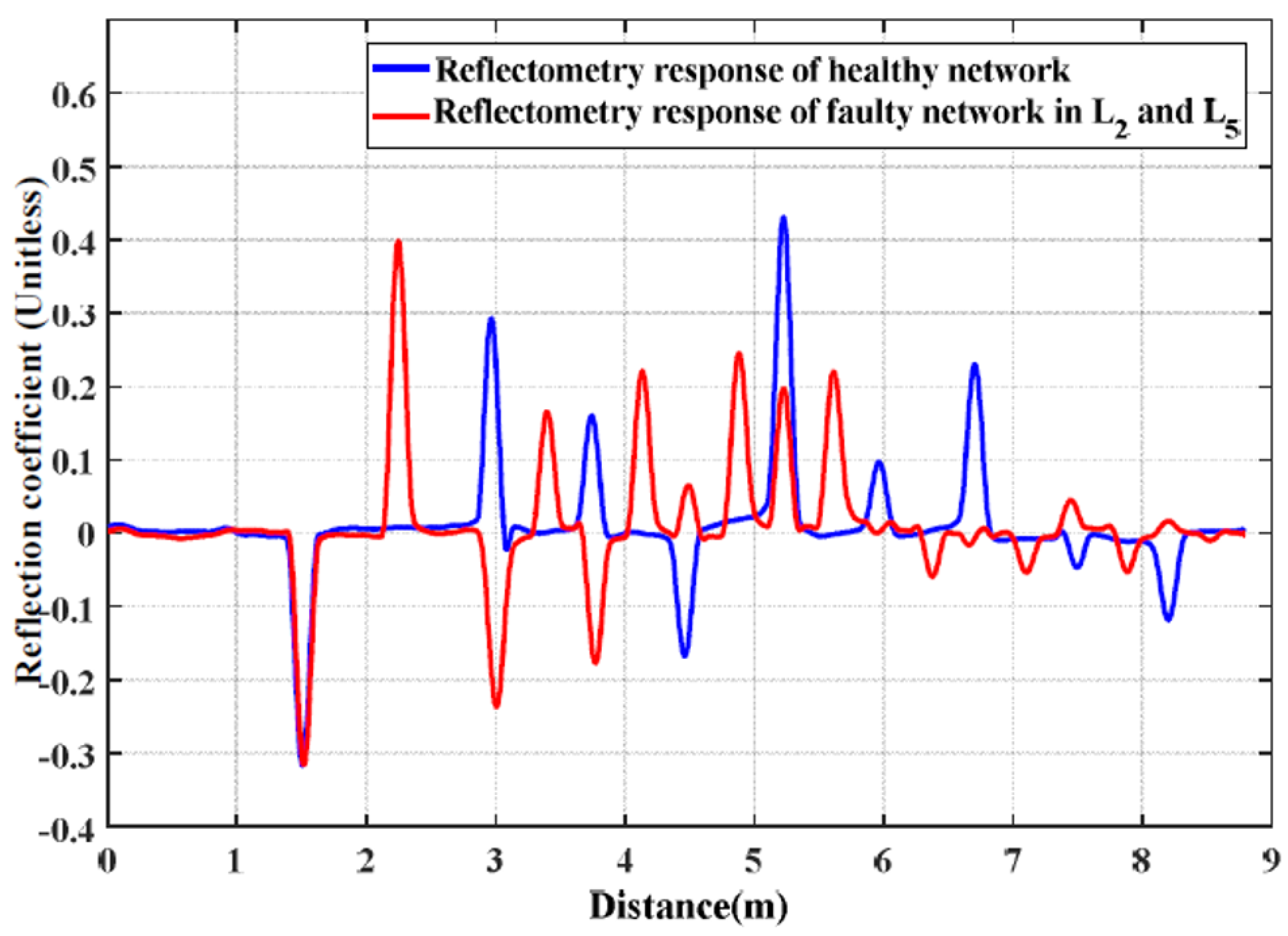
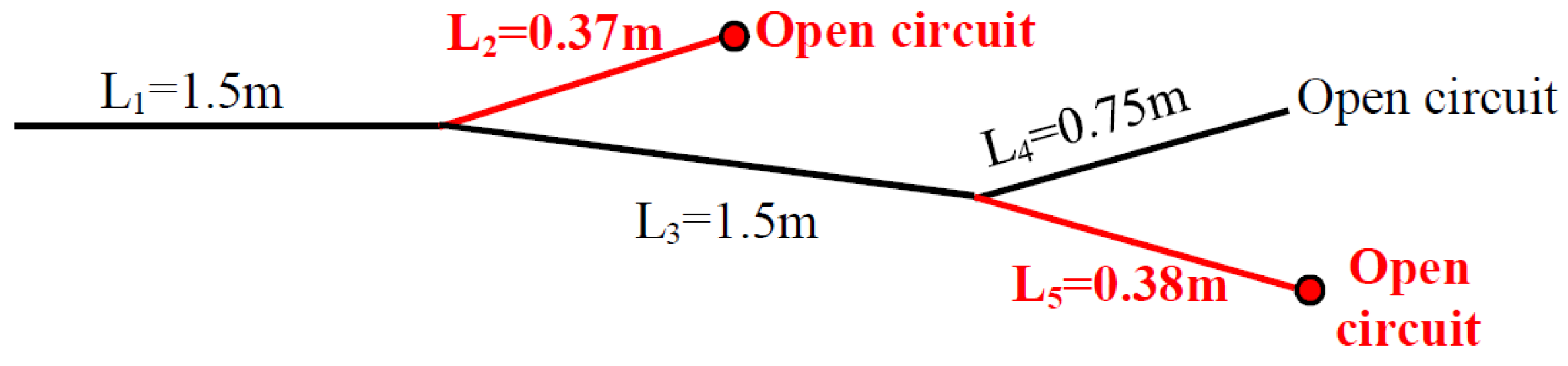
5.3. Diagnosis of a YY-Shaped Network Affected by One or Two Hard Faults
- A first binary TWSVM classification model was created to identify the number of faults in the network (either one fault or two faults). To construct this model offline, the dataset was divided into two parts. One part includes the TDR responses that represent a single fault in the Y-Y network, while the other part consists of TDR responses that are affected by two faults.
- A second multiclass TWSVM classification model was created for the case of a single fault, following a similar approach to the model described in the Section 5.1 but with additional branches (we had , , , , and in this case). The construction of this model in an offline setting involves utilizing TDR responses that depict the occurrence of a single fault within the Y-Y network across various branches.
- A third binary TWSVM classification model was created for the case of a single fault in order to identify the nature of the fault (open or short).
- A fourth multiclass TWSVM classification model was created specifically for scenarios involving two faults. In order to construct this model offline, TDR responses representing the occurrence of two faults in various branches of the Y-Y network were utilized.
- A fifth multiclass TWSVM classification model was created for the case of two faults in order to identify the nature of the faults (i.e., whether both faults are open or both faults are short, as well as whether the first fault is a short circuit, the second an open circuit, or vice versa).
- Two TWSVR regression models were developed, one for the case of a single fault and another for the case of two faults, with the aim of estimating the lengths of the impacted branches.
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Furse, C.; Chung, Y.; Lo, C.; Pendayala, P. A critical comparison of reflectometry methods for location of wiring faults. Smart Struct. Syst. 2006, 2, 25–46. [Google Scholar] [CrossRef]
- Furse, C.; Haupt, R. Down to the wire: Aging, brittle wiring within aircraft poses a hidden hazard that emerging technologies aim to address. IEEE Spectr. 2001, 28, 34–39. [Google Scholar] [CrossRef]
- Sharma, C.; Furse, C.; Harrison, R. Low-power STDR CMOS sensor for locating faults in aging aircraft wiring. IEEE Sens. J. 2006, 7, 43–50. [Google Scholar] [CrossRef]
- Furse, C.; Smith, P.; Safavi, M.; Lo, C. Feasibility of spread spectrum sensors for location of arcs on live wires. IEEE Sens. J. 2005, 5, 1445–1450. [Google Scholar] [CrossRef]
- Lelong, A.; Carrion, M. On line wire diagnosis using multicarrier time domain reflectometry for fault location. In Proceedings of the SENSORS, 2009, Canterbury, New Zealand, 25–28 October 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 751–754. [Google Scholar]
- Furse, C.; Chung, Y.C.; Dangol, R.; Nielsen, M.; Mabey, G.; Woodward, R. Frequency-domain reflectometry for on-board testing of aging aircraft wiring. IEEE Spectr. 2003, 45, 306–315. [Google Scholar]
- Shi, Y.J. Theory and Application of Time-Frequency Analysis to Transient Phenomena in Electric Power and Other Physical Systems. Ph.D. Thesis, University of Texas, Austin, TX, USA, 2004. [Google Scholar]
- Cheng, J.; Zhang, Y.; Yun, H.; Wang, L.; Taylor, N. A Study of Frequency Domain Reflectometry Technique for High-Voltage Rotating Machine Winding Condition Assessment. Machines 2023, 11, 883. [Google Scholar] [CrossRef]
- Chilan, M.; Pirhadi, A.; Asadi, S.; Helfert, S. Analysis of multiconductor transmission lines using the time domain method of lines. AEU-Int. J. Electron. Commun. 2021, 138, 153863. [Google Scholar] [CrossRef]
- Honarbakhsh, B.; Asadi, S. Analysis of multiconductor transmission lines using the CN-FDTD method. IEEE Trans. Electromagn. Compat. 2017, 1, 184–192. [Google Scholar] [CrossRef]
- Paul, C.R. Analysis of Multiconductor Transmission Lines; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Osman, O.; Sallem, S.; Sommervogel, L.; Carrion, M.; Bonnet, P.; Paladian, F. Distributed reflectometry for soft fault identification in wired networks using neural network and genetic algorithm. IEEE Sens. J. 2020, 20, 4850–4858. [Google Scholar] [CrossRef]
- Zhang, L.; Zhao, Z.; Zhang, D.; Luo, C.; Li, C. Particle swarm optimization pattern recognition neural network for transmission lines faults classification. Intell. Data Anal. 2022, 26, 189–203. [Google Scholar] [CrossRef]
- Chang, S.; Park, J. Wire mismatch detection using a convolutional neural network and fault localization based on time–frequency-domain reflectometry. IEEE Trans. Ind. Electron. 2018, 66, 2102–2110. [Google Scholar] [CrossRef]
- Laib, A.; Terriche, Y.; Melit, M.; Su, C.L.; Mutarraf, M.; Bouchekara, H.; Guerrero, J.; Boudjefdjouf, H. Enhanced artificial intelligence technique for soft fault localization and identification in complex aircraft microgrids. Eng. Appl. Artif. Intell. 2024, 127, 107289. [Google Scholar] [CrossRef]
- Smail, M.; Sellami, Y.; Bouchekara, H.; Boubezoul, A. Wiring Diagnosis using Time Domain Reflectometry and Random Forest. In Proceedings of the 2019 22nd International Conference on the Computation of Electromagnetic Fields (COMPUMAG), Paris, France, 15–19 July 2019; pp. 1–4. [Google Scholar]
- Smail, M.; Boubezoul, A.; Bouchekara, H.; Sellami, Y. Wiring networks diagnosis using time-domain reflectometry and support vector machines. IET Sci. Meas. Technol. 2020, 14, 220–224. [Google Scholar] [CrossRef]
- Banerjee, R.; Jamshed, A.; Haque, N. Localization of Faults in Coaxial Cables using Time-Domain Reflectometry and Support Vector Machine. In Proceedings of the 2023 IEEE 3rd Applied Signal Processing Conference (ASPCON), Haldia, India, 24–25 November 2023; pp. 242–245. [Google Scholar]
- Laib, A.; Chelabi, M.; Terriche, Y.; Melit, M.; Boudjefdjouf, H.; Ahmed, H.; Chedjara, Z. Enhanced complex wire fault diagnosis via integration of time domain reflectometry and particle swarm optimization with least square support vector machine. IET Sci. Meas. Technol. 2024, 18, 417–428. [Google Scholar] [CrossRef]
- Goudjil, A.; Smail, M.; Pichon, L.; Bouchekara, H.; Javaid, M. Wiring networks diagnosis using K-Nearest neighbour classifier and dynamic time warping. Nondestruct. Test. Eval. 2024, 39, 1–18. [Google Scholar] [CrossRef]
- Jayadeva; Khemchandani, R.; Chandra, S. Twin support vector machines for pattern classification. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 905–910. [Google Scholar] [CrossRef] [PubMed]
- Jayadeva; Khemchandani, R.; Chandra, S. Twin Support Vector Machines: Models, Extensions and Applications; Springer Publishing Company, Incorporated: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Tanveer, M.; Rajani, T.; Rastogi, R.; Shao, Y.H.; Ganaie, M. Comprehensive review on twin support vector machines. Ann. Oper. Res. 2024, 339, 1223–1268. [Google Scholar] [CrossRef]
- Tanveer, M.; Tiwari, A.; Choudhary, R.; Jalan, S. Sparse pinball twin support vector machines. Appl. Soft Comput. 2019, 78, 164–175. [Google Scholar] [CrossRef]
- Shao, Y.H.; Chen, W.J.; Zhang, J.J.; Wang, Z.; Deng, N.Y. An efficient weighted Lagrangian twin support vector machine for imbalanced data classification. Pattern Recognit. 2014, 47, 3158–3167. [Google Scholar] [CrossRef]
- Wang, Z.; Shao, Y.H.; Wu, T.R. A GA-based model selection for smooth twin parametric-margin support vector machine. Pattern Recognit. 2013, 46, 2267–2277. [Google Scholar] [CrossRef]
- Rastogi, R.; Sharma, S. Fast Laplacian twin support vector machine with active learning for pattern classification. Appl. Soft Comput. 2019, 74, 424–439. [Google Scholar] [CrossRef]
- Tanveer, M.; Gautam, C.; Suganthan, P. Comprehensive evaluation of twin SVM based classifiers on UCI datasets. Appl. Soft Comput. 2019, 83, 105617. [Google Scholar] [CrossRef]
- Xie, J.; Hone, K.; Xie, W.; Gao, X.; Shi, Y.; Liu, X. Extending twin support vector machine classifier for multi-category classification problems. Intell. Data Anal. 2013, 17, 649–664. [Google Scholar] [CrossRef]
- Shao, Y.H.; Chen, W.J.; Huang, W.B.; Yang, Z.M.; Deng, N.Y. The best separating decision tree twin support vector machine for multi-class classification. Procedia Comput. Sci. 2013, 17, 1032–1038. [Google Scholar] [CrossRef]
- Xu, Y. K-nearest neighbor-based weighted multi-class twin support vector machine. Neurocomputing 2016, 205, 430–438. [Google Scholar] [CrossRef]
- Ding, S.; Zhao, X.; Zhang, J.; Zhang, X.; Xue, Y. A review on multi-class TWSVM. Artif. Intell. Rev. 2017, 52, 775–801. [Google Scholar] [CrossRef]
- Jayadeva; Khemchandani, R.; Chandra, S. TWSVR: Twin support vector machine based regression. In Twin Support Vector Machines. Studies in Computational Intelligence; Springer: Cham, Switzerland, 2017; pp. 63–101. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Kernel Name | Mathematical Function |
|---|---|
| Linear | |
| Polynomial | |
| RBF | |
| Sigmoid | |
| Laplace |
| Kernel Functions | Accuracy % | Macro Average Sensitivity % |
|---|---|---|
| Linear | 98.60 ± 0.035 | 97.33 ± 0.039 |
| Polynomial | 97.84 ± 0.051 | 96.25 ± 0.064 |
| RBF | 97.28 ± 0.062 | 95.03 ± 0.083 |
| Sigmoid | 95.92 ± 0.070 | 93.29 ± 0.131 |
| Laplace | 94.56 ± 0.121 | 91.12 ± 0.176 |
| Methods | Accuracy (%) | Macro Average Sensitivity (%) |
|---|---|---|
| SVM-Laplacian | 89.20% | 85.34% |
| SVM-Linear | 96.21% | 93.20% |
| SVM-Polynomial | 97.67% | 96.17% |
| SVM-Sigmoid | 56.38% | 54.45% |
| SVM-RBF | 94.85% | 92.19% |
| TWSVM-Linear | 98.60% | 97.33% |
| Random Forest | 97.56% | 95.83% |
| K-Nearest Neighbor | 91.84% | 86.6% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Goudjil, A.; Smail, M.K. Wiring Network Diagnosis Using Reflectometry and Twin Support Vector Machines. Sustainability 2025, 17, 1836. https://doi.org/10.3390/su17051836
Goudjil A, Smail MK. Wiring Network Diagnosis Using Reflectometry and Twin Support Vector Machines. Sustainability. 2025; 17(5):1836. https://doi.org/10.3390/su17051836
Chicago/Turabian StyleGoudjil, Abdelhak, and Mostafa Kamel Smail. 2025. "Wiring Network Diagnosis Using Reflectometry and Twin Support Vector Machines" Sustainability 17, no. 5: 1836. https://doi.org/10.3390/su17051836
APA StyleGoudjil, A., & Smail, M. K. (2025). Wiring Network Diagnosis Using Reflectometry and Twin Support Vector Machines. Sustainability, 17(5), 1836. https://doi.org/10.3390/su17051836