2. Problem Formulation and Modeling
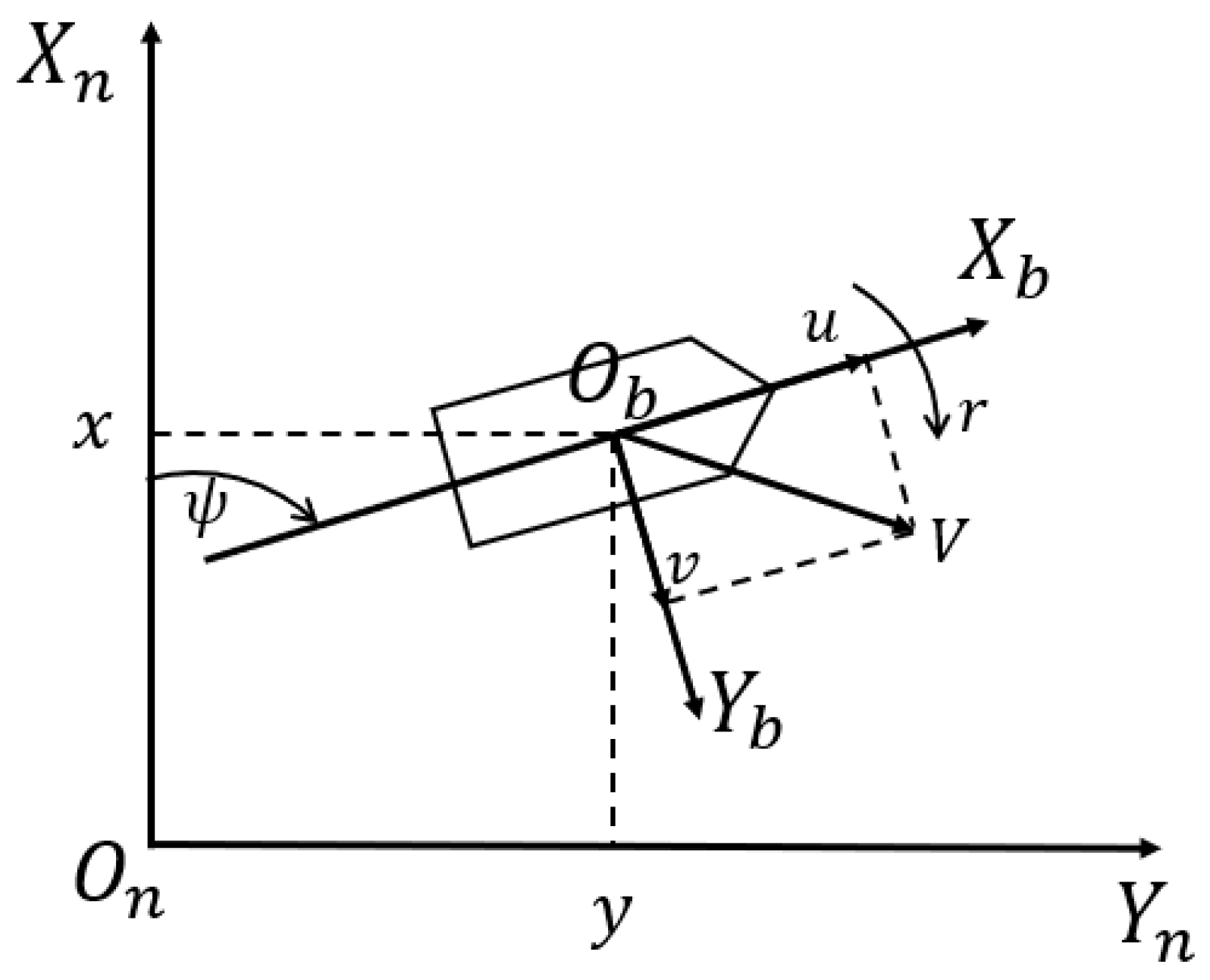
Ship has six degrees of freedom when sailing at sea. When studying the trajectory tracking problem of an underactuated ship, the motion is generally simplified to three degrees of freedom, namely surge, sway, and yaw, as shown in
Figure 1. Here,
and
denote the surge and sway displacements of the vessel measured in the earth-fixed (inertial) frame whose origin
is defined at the ship’s initial deployment point. In practical applications, the triplet
is obtained in real time from onboard navigation sensors. A GPS/GNSS receiver provides global position which is projected to local tangential coordinates, while an Inertial Navigation System or high-precision compass measures the yaw angle
relative to true north. The origin
is fixed by recording the GPS coordinates (latitude, longitude) at the start of the mission and converting them to the chosen local coordinate system.
The mathematical model of a three-degree-of-freedom ship is considered:
And the mathematical model of kinematics and dynamics can be written as follows:
where
is the surge displacement, sway displacement, and yaw angle of the ship in the Earth-fixed coordinate frame, that is, the position vector;
represents the surge velocity, sway velocity, and yaw angular velocity of the vessel in the body-fixed coordinate frame, which is the velocity vector;
is the conversion matrix between the Earth-fixed coordinate frame and the body-fixed coordinate frame, satisfying
. The expression of
is as follows:
is the ship inertia matrix:
is the Coriolis force matrix:
where
.
is the hydrodynamic damping parameter matrix:
Because the underactuated ship has no lateral control forces, that is, , so , is the surge force of the ship, is the yawing moment of the ship; is the external environment interference. And . Among them, is the mass of the ship; is the moment of inertia; hydrodynamic force derivatives , , .
Assumption 1. The reference trajectory of the underactuated ship is smooth and has first- and second-order derivatives.
Assumption 2. The interference of the external environment is represented by time-varying disturbances
, and the upper bounds of the disturbances
are known.
Lemma 1 [
24]
. For nonlinear systems, if there is a positive definite Lyapunov function :
and any scalar ,
so that the inequality holds, the system is finite-time stable, and its stabilization time is Control objectives: Aiming at the underactuated ship mathematical model (2), under the condition that the assumption is established, the controller is designed so that the underactuated ship can track the desired trajectory within a limited time and maintain stability.
3. Control Design
The study primarily focuses on controlling the surge and steering motion of the vessel using only the propeller and rudder, without incorporating lateral control forces. Therefore, in the design of the controller, emphasis is placed on determining the appropriate surge force
and yawing moment
to indirectly regulate the lateral control force of the ship.
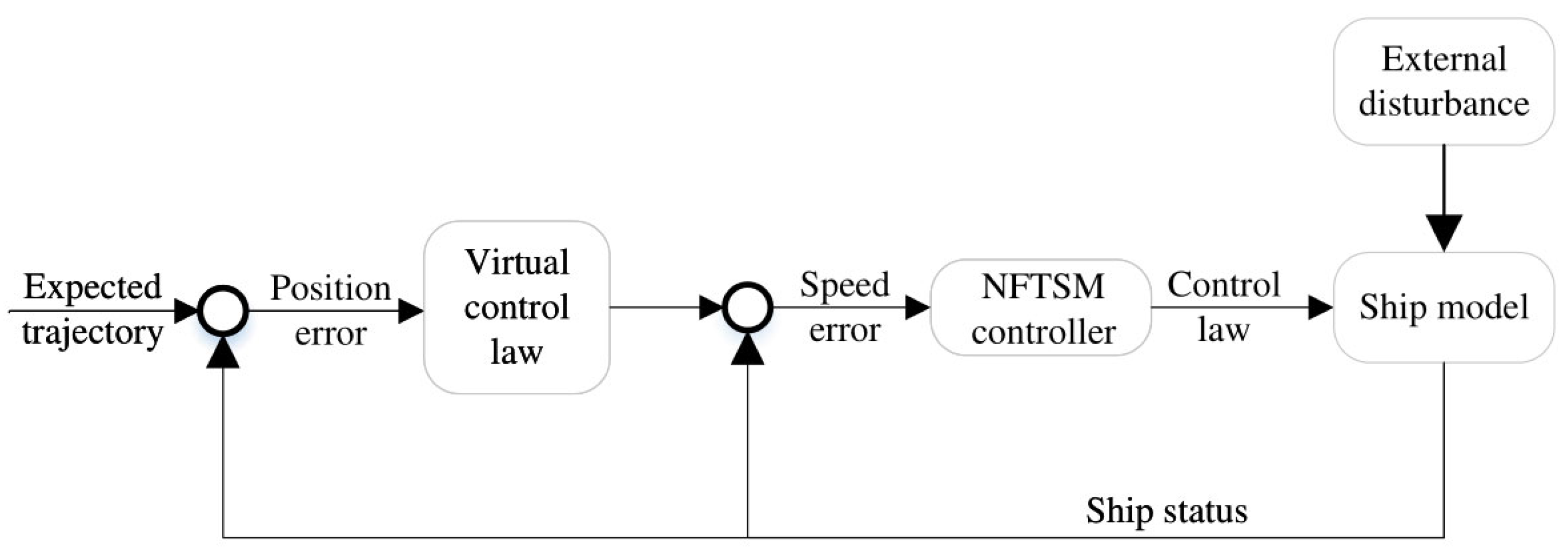
Figure 2 depicts the ship trajectory tracking and control process.
First, a virtual control law is formulated based on the position error of the ship, serving as the reference velocity that the vessel should follow. Subsequently, the error between the desired speed and the actual speed is calculated, and an NFTSMC is designed to solve for the ship’s surge force and yawing moment . This controller is specifically designed to eliminate singularity issues and ensure precise control performance. Ultimately, the computed control laws are applied to the underactuated ship, enabling it to accurately follow the desired trajectory even in the presence of external disturbances.
3.1. Design of Virtual Control Law
The definition of surge and sway position tracking error is as follows:
where
are the surge and sway coordinates of the desired trajectory, respectively,
are the actual surge and sway coordinates of the ship, and
are the surge and sway position tracking errors, respectively.
The derivative of Formula (3) with respect to time
can be obtained as follows:
To ensure stability in trajectory tracking for the ship, the virtual control laws for surge and sway,
and
, are designed separately. Specifically, the surge virtual control law, denoted as
, and the sway virtual control law, denoted as
[
21], are formulated.
where
,
. Therefore,
When
, the formula is arranged as follows:
In order to verify the stability of the designed virtual control law, the following Lyapunov function is constructed:
The derivation of Formula (8) is as follows:
From Formula (9), it can be determined that . Combined with Formula (7) and applying the stability criterion, it can be concluded that the position error is asymptotically stable.
The derivation of Formula (5) is as follows:
where
3.2. NFTSM Controller Design
Define surge velocity error
and sway velocity error
as follows:
The following NFTSM surfaces are designed separately for
and
:
where
.
According to the NFTSM surface, the surge force
and the yawing moment
are designed as follows:
where
;
,
,
is the upper bound of
, that is,
;
is the upper bound of
, that is,
;
is the upper bound of
, that is,
;
is the upper bound of
, that is,
. In the formula
Theorem 1. Consider the underactuated ship dynamics given in Equation (2), subject to Assumptions 1 and 2. If the virtual control laws (5)–(7) apply, NFTSM surfaces (15) and (16) are used, and the surge force
and yaw moment is chosen, as in (17) and (18), then both the surge velocity error
and yaw-rate error converge to zero in finite time. Consequently, the ship’s position
and heading track the desired trajectory within a guaranteed finite time.
Proof of Theorem The Lyapunov function is constructed as follows:
Deriving it and substituting (15) and (17) into (26), then
According to Lemma 1, the surge velocity error can converge within a finite time under the effect of the surge force. The convergence time is defined by the following expression:
- b.
When
Construct the Lyapunov function as follows:
Deriving it and substituting (15) and (17) into (28), then
According to Lemma 1, the surge velocity error can converge within a finite time under the effect of the surge force. The convergence time is defined by the following expression.
construct the Lyapunov function as follows:
Deriving it and substituting (16) and (18) into (30), then
According to Lemma 1, the sway velocity error can converge within a finite time under the effect of the yawing moment. The convergence time is defined by the following expression.
b. When
Construct the Lyapunov function as follows:
Deriving it and substituting (16) and (18) into (32), then
According to Lemma 1, the sway velocity error can converge within a finite time under the effect of the yawing moment. The convergence time is defined by the following expression.
From the above, it can be seen that this method is more suitable for tracking the desired trajectory of the ship in a limited time. □
Theorem 2. Consider the underactuated ship dynamics described in Equation (2), under the conditions specified by Assumptions 1 and 2. If the virtual control laws defined in Equations (5)–(7) and NFTSM surfaces (15) and (16) are employed, and the surge force and yaw moment are chosen as in (17) and (18), then both the surge velocity error and yaw-rate error converge to zero in finite time. The closed-loop error signals are all error signals of the underactuated ship tracking control closed-loop system, and are consistent and eventually bounded.
Proof of Theorem Construct the Lyapunov function as follows:
Deriving it and substituting (15) and (17) into (34), then
- b.
When
Construct the Lyapunov function as follows:
Deriving it and substituting (15) and (17) into (36), then
Construct the Lyapunov function as follows:
Deriving it and substituting (16) and (18) into (38), then
- b.
When
Construct the Lyapunov function as follows:
Deriving it and substituting (16) and (18) into (40), then
From Equations (35), (37), (39) and (41), it can be seen that . This indicates that all error signals in the underactuated ship trajectory tracking system are consistent and ultimately bounded. □
3.3. Yaw Angle Stability Analysis
Construct the Lyapunov function as follows:
Deriving Formula (42) and substituting Formula (2):
If . Then . So is a decreasing function under the condition of . Therefore, are bounded, and the yaw angular velocity is also bounded. The certificate is completed.
The initial values of the controller parameters were determined based on a combination of theoretical guidelines and empirical tuning. Specifically, the parameters were initially chosen to be sufficiently large to ensure rapid disturbance estimation while avoiding excessive noise and the gains and nonlinear terms were iteratively adjusted through simulation to achieve an optimal balance between response speed, chatter suppression, and stability. Detailed processes for selecting initial values are illustrated in the parameter sensitivity analysis provided in the simulation section.
4. Simulation
In order to verify the performance of the NFTSMC designed in this paper, this section compares the traditional SMC with the controller designed in this paper. To ensure a fair and meaningful comparison, the baseline sliding mode controller (SMC) implemented in this study adopts the same virtual control laws defined in Equations (13) and (14) as the proposed NFTSMC. The SMC controller uses a conventional linear sliding surface defined as
, and its control law is based on the sign-type exponential reaching law:
where
is a constant gain and
is a design parameter to ensure sliding mode convergence. This control structure is commonly used in traditional SMC implementations for trajectory tracking of underactuated ships. The only difference between SMC and NFTSMC in this study lies in the sliding surface and reaching law design NFTSMC replaces the discontinuous sign-based reaching law with a continuous, non-singular fast terminal surface, allowing finite-time convergence and improved control smoothness.
The ship model in literature [
22] is selected for the comparison simulation experiment, and the ship model parameters are listed as follows:
The interference force generated by the external environment is . Regarding the tracking research of reference trajectories for straight lines and curves, first set the desired trajectory for the straight line as ,. The initial state of the ship is ; parameters , , , , , , .
In the above values, the initial choice of the fractional power
as 21/27 was guided by general recommendations from existing literature and extensive simulation experiments. This ratio not only satisfies the finite-time convergence conditions specified in Lemma 1 but also demonstrated optimal convergence speed and robustness in practical control performance through multiple simulations. Other numerical combinations were tested, but the 21/27 ratio provided the best overall performance. The simulation results are shown in
Figure 3,
Figure 4,
Figure 5,
Figure 6 and
Figure 7.
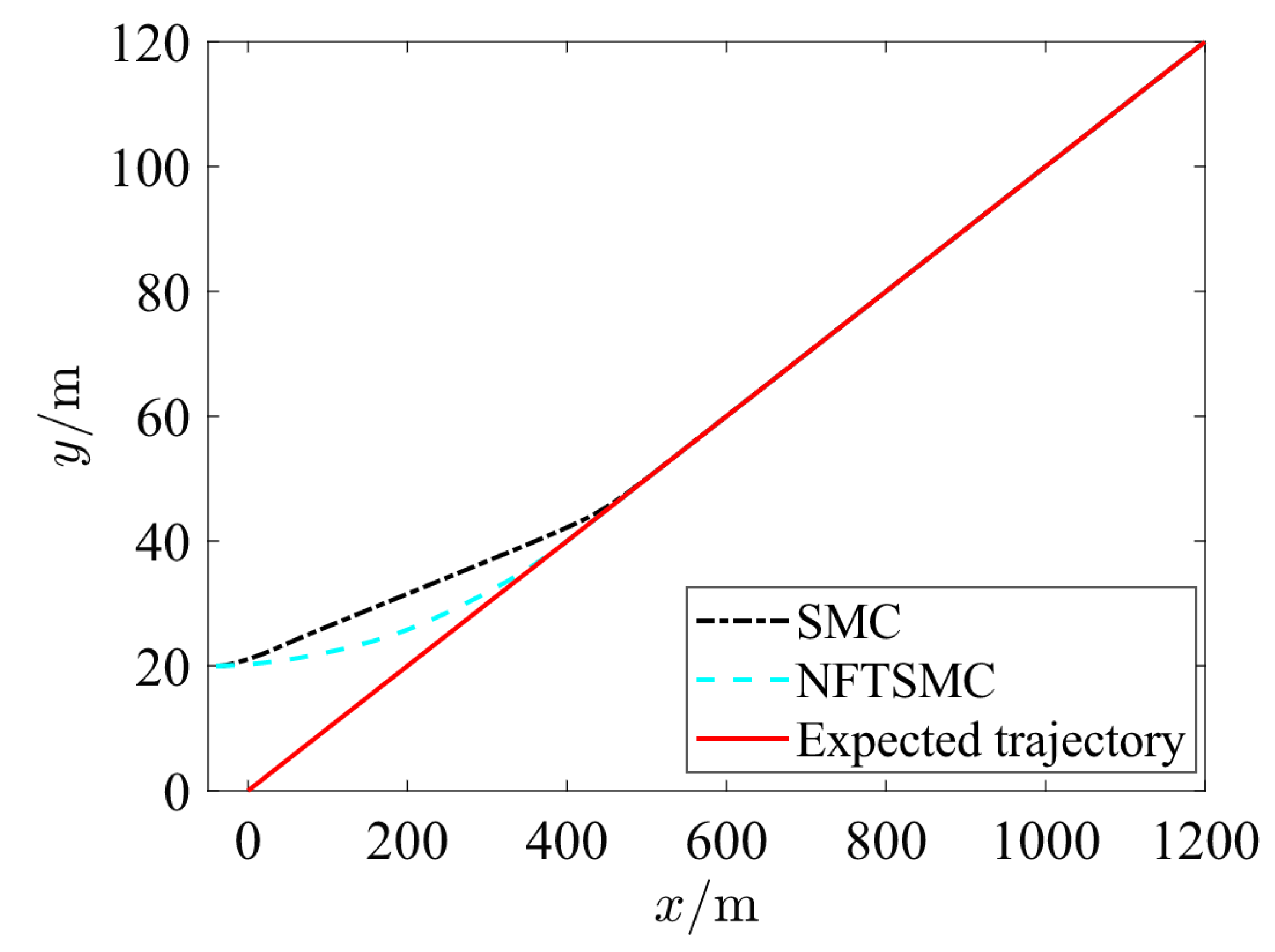
Figure 3 shows the results of traditional SMC and NFTSM controller designed in this paper for ship trajectory tracking. As shown in
Figure 3, the proposed NFTSM controller enables the underactuated ship to track the desired trajectory more rapidly and maintain stable tracking even in the presence of disturbances, which means that the NFTSM controller is effective and superior.
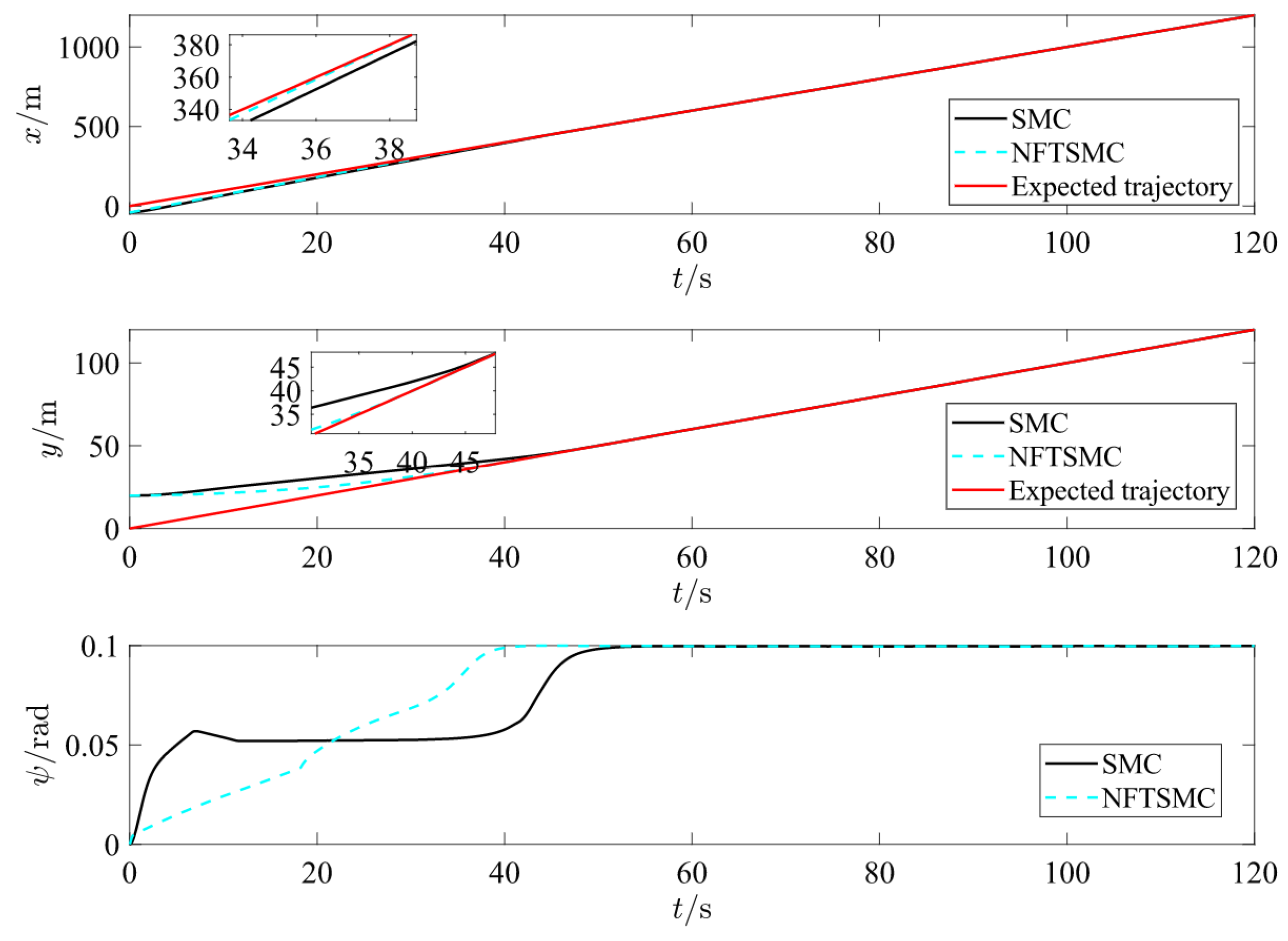
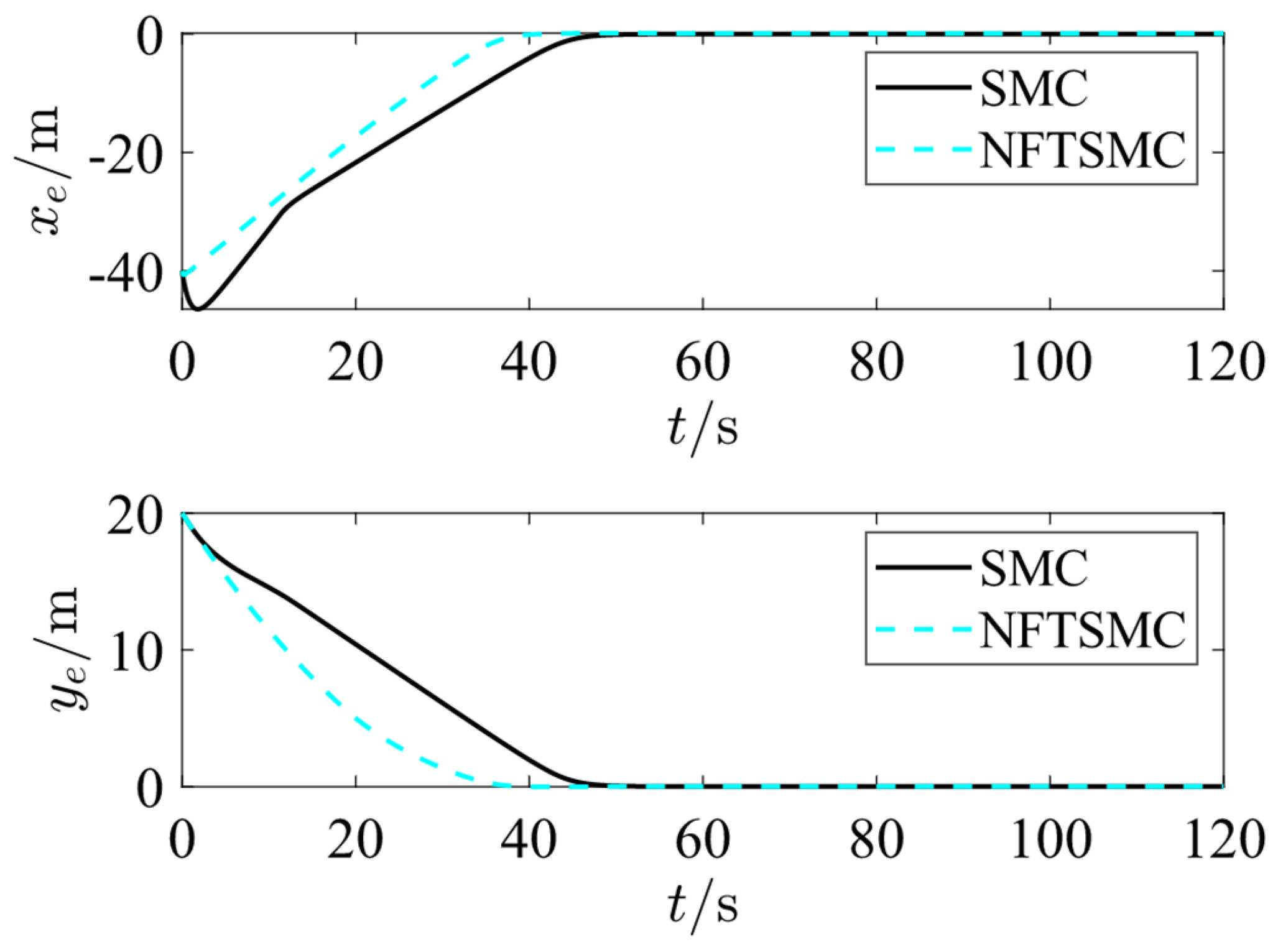
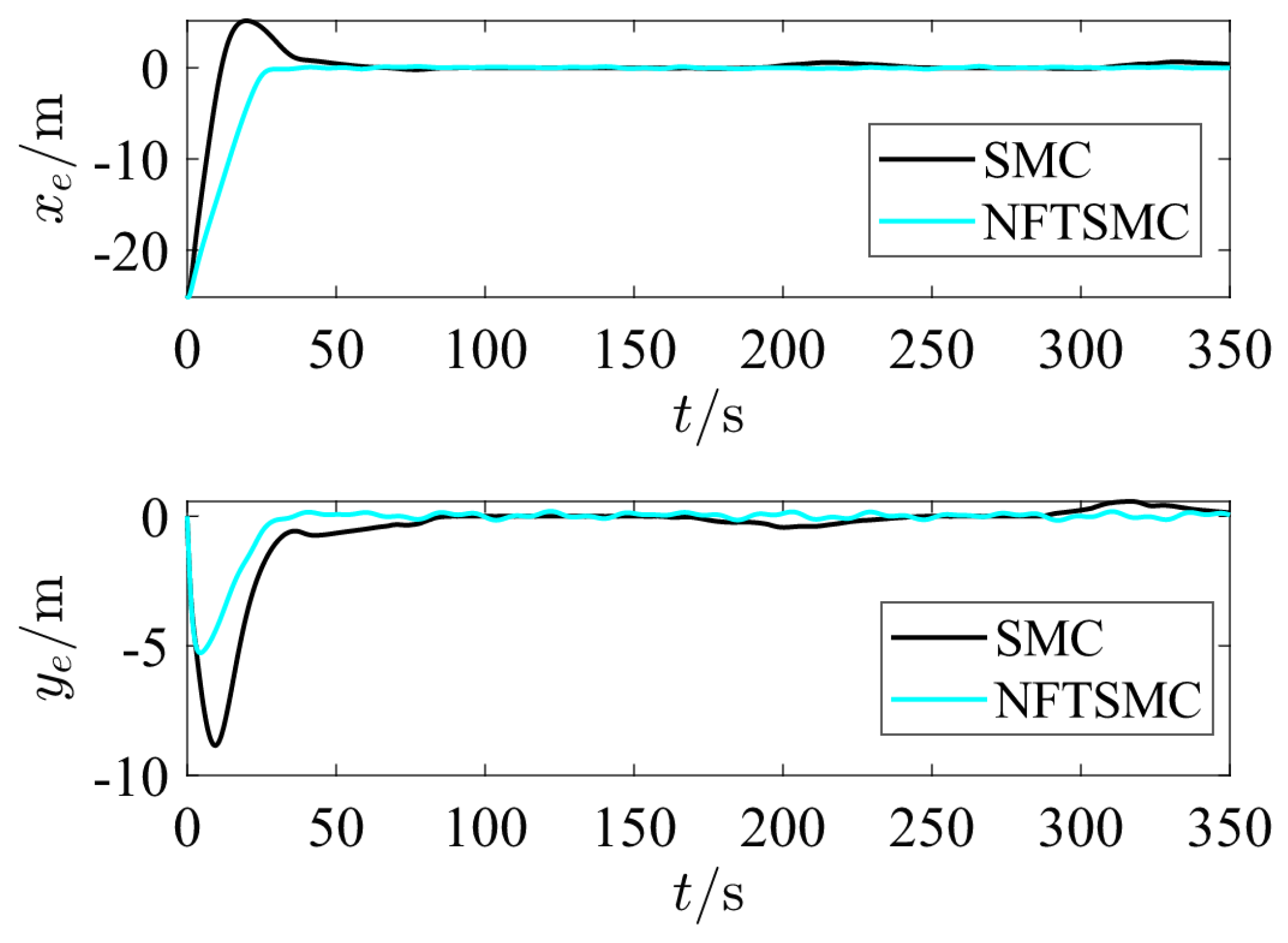
Figure 4 and
Figure 5 show that the ship trajectory error under NFTSM control tends to zero within 40 s, making it faster and smoother than the traditional SMC.
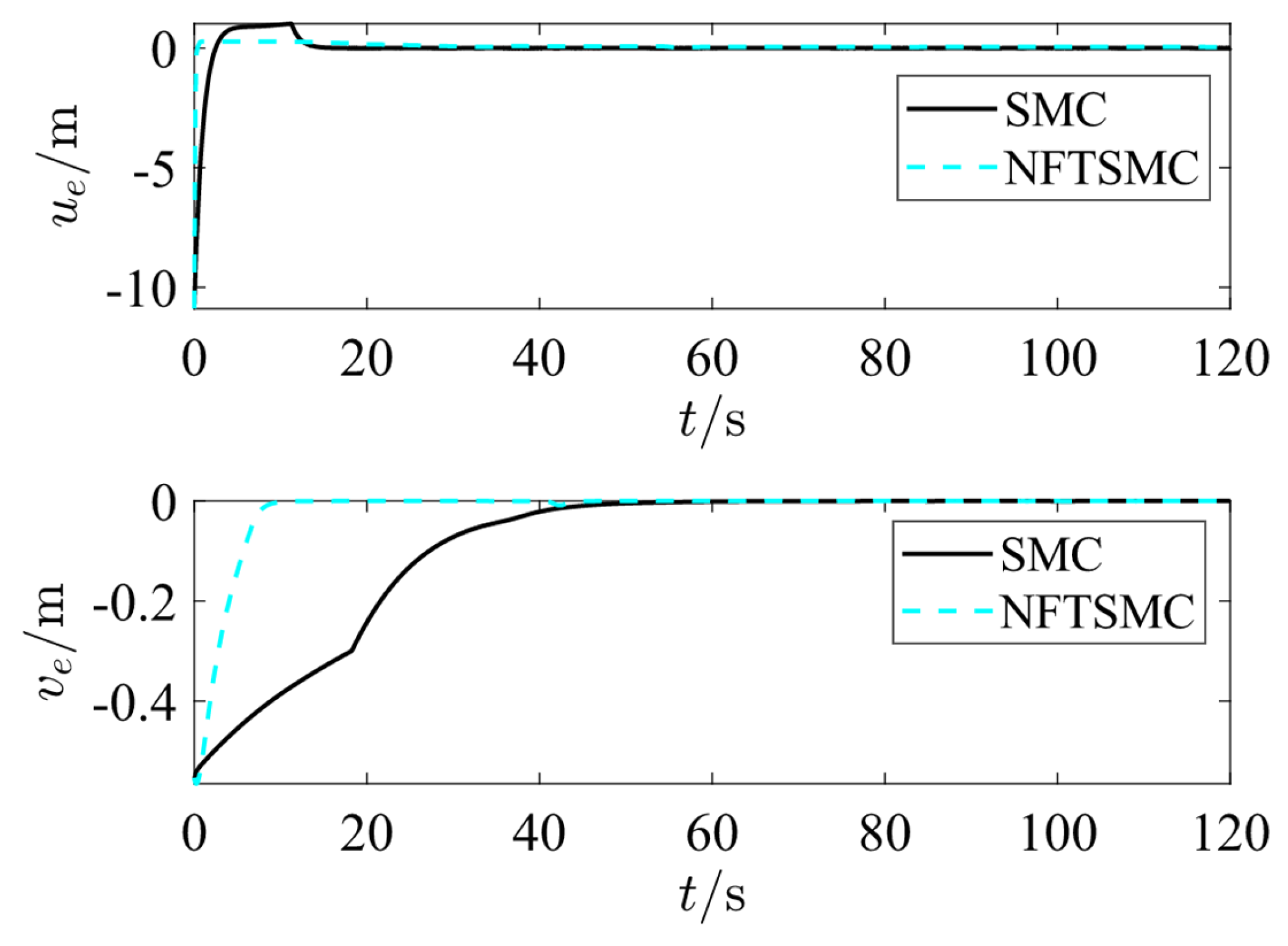
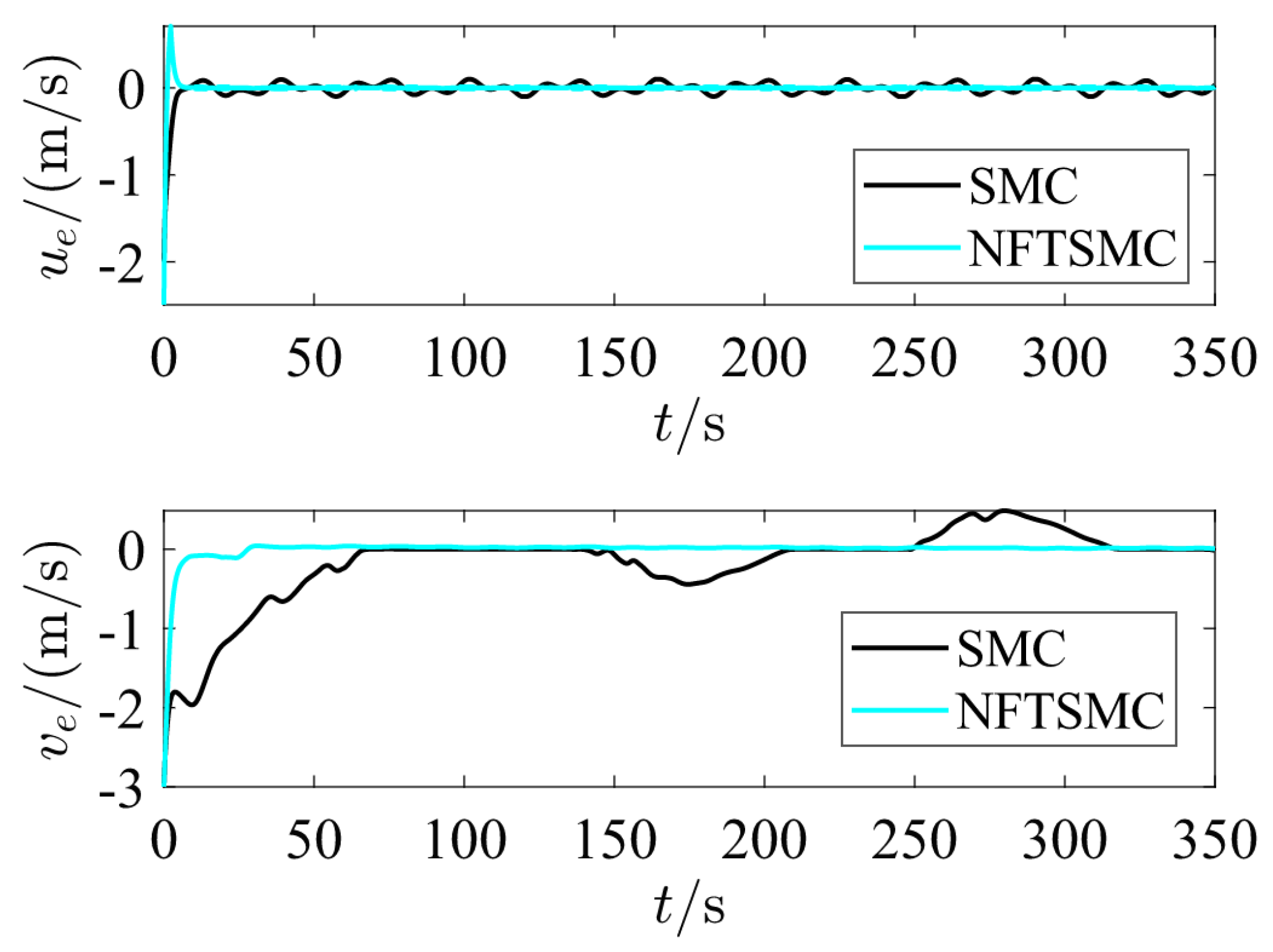
Figure 6 shows the variation curves of surge speed error
and sway speed error
of the underactuated ship during the control process by two controllers. It can be seen that using NFTSM controller can make the ship converge the error faster.
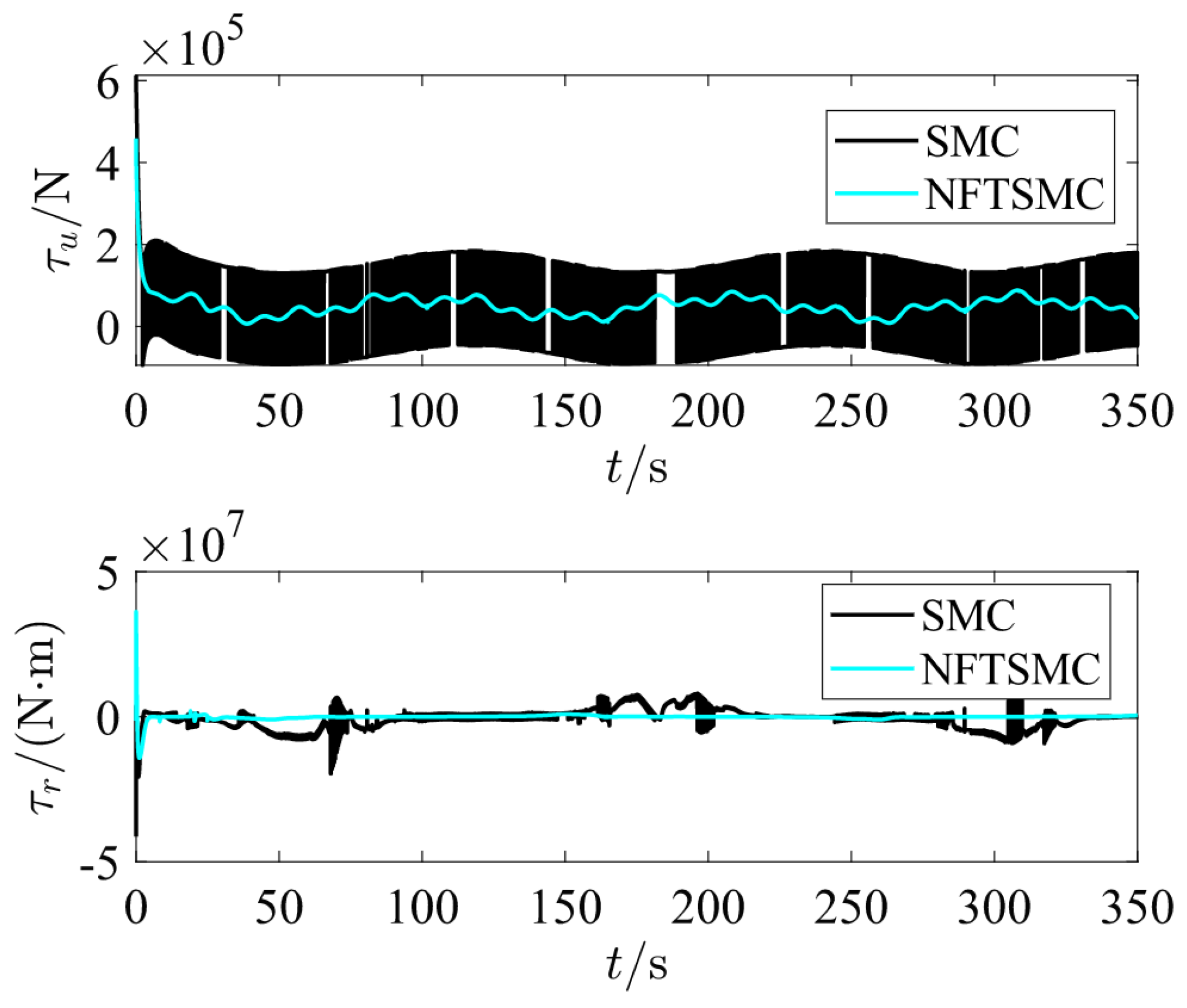
Figure 7 shows the curves of surge force
and yawing moment
of the underactuated ship. It can be observed that the NFTSM controller effectively suppresses oscillations, thereby enhancing navigational safety and efficiency while also reducing actuator wear and tear.
The set curve reference trajectory is
,
. The initial state of the ship is set to
. The control parameters remain unchanged. The simulation results are shown in
Figure 8,
Figure 9,
Figure 10,
Figure 11 and
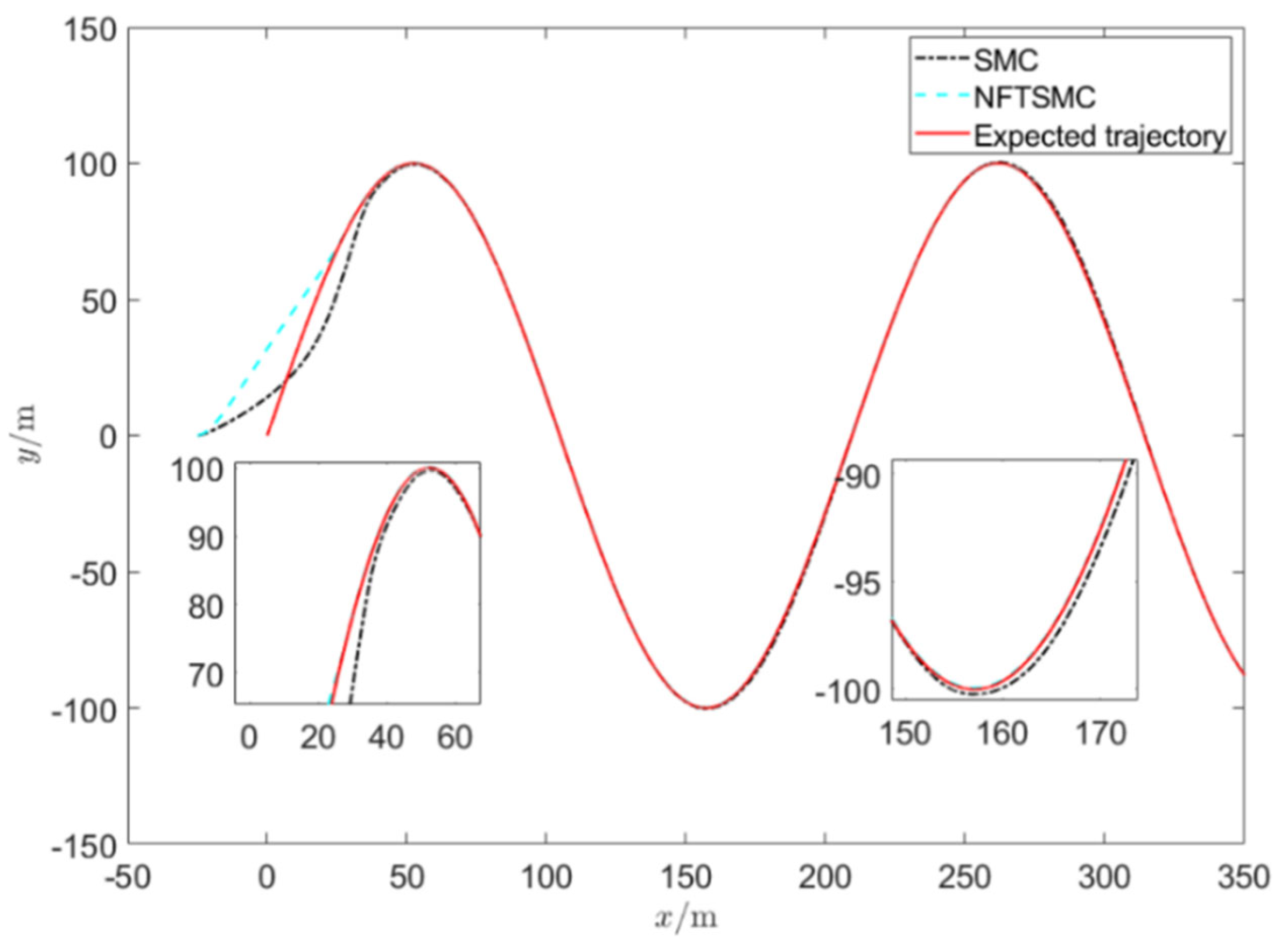
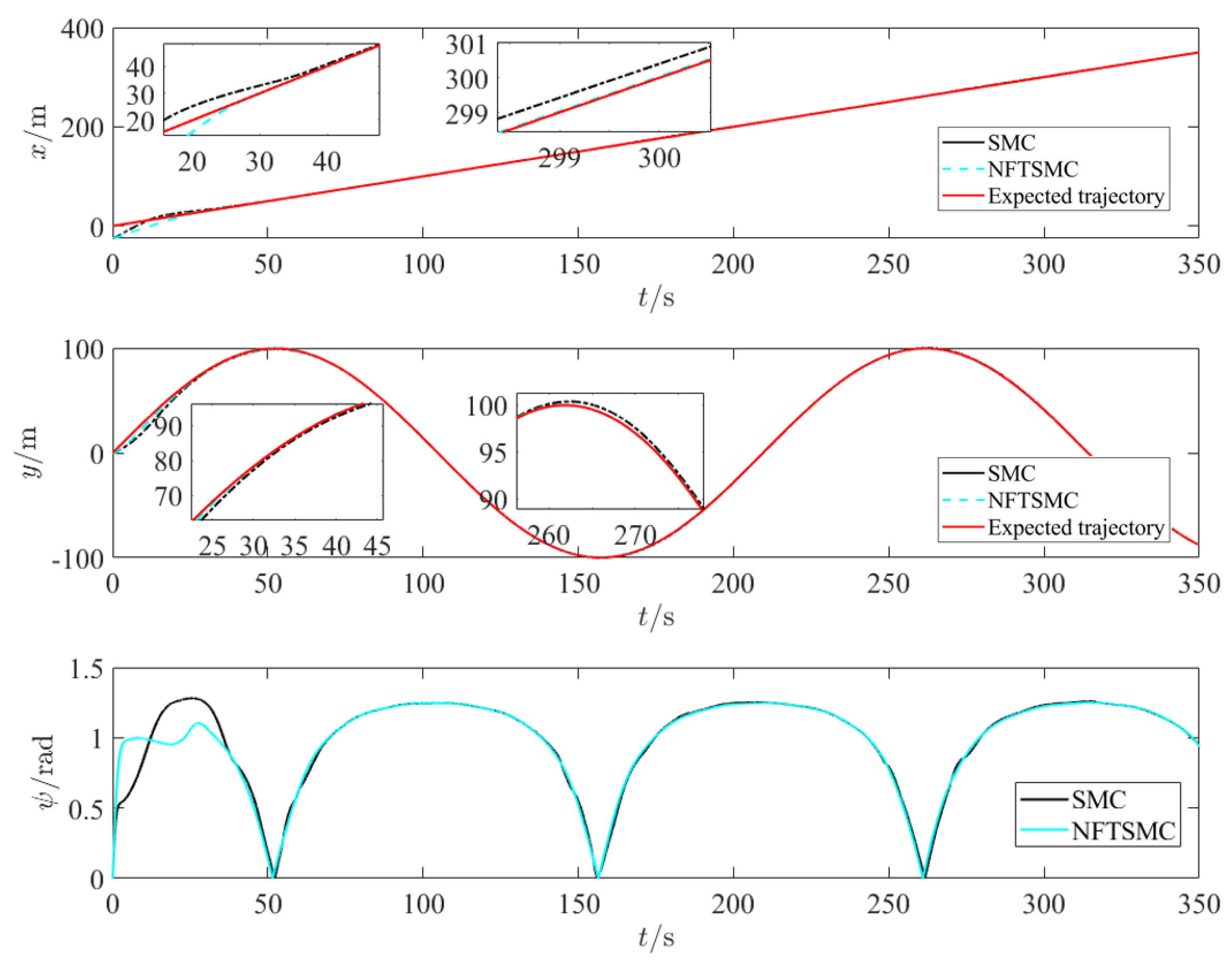
Figure 12. As shown in
Figure 8,
Figure 9 and
Figure 10, in the presence of known disturbances, the ship demonstrates excellent tracking performance for the curved reference trajectory and outperforms the traditional sliding mode controller (SMC). In particular, the traditional SMC exhibits inferior turning performance compared to the NFTSM controller.
Figure 11 shows the variations in the surge speed error
and sway speed error
of the underactuated ship during the control process using both algorithms. It can be observed that using the NFTSM controller can make the ship converge faster and the error changes smoothly, which is more in line with the actual navigation of the ship.
Figure 12 shows the curves of the surge force
and yawing moment
of the underactuated ship. It can be seen that the NFTSM controller effectively reduces the generation of oscillations, improves the safety and navigation efficiency of the ship, and reduces the wear and tear of the actuators.
In summary, the proposed NFTSM controller for underactuated ships enables rapid and stable trajectory tracking, even in the presence of environmental disturbances, within a finite time. Furthermore, it effectively suppresses oscillations, which is of critical importance for enhancing the safety, navigational efficiency, reliability, and operational comfort of marine vessels.
5. Conclusions
This paper proposes an NFTSMC method to address the issues of non-singularity and slow convergence in traditional terminal sliding mode control, specifically applied to the trajectory tracking of underactuated ships. A virtual control law is first designed based on the position error of the vessel, which determines the desired speed during the tracking process. The speed error is then computed, and the ship’s surge force and yawing moment are derived using the NFTSMC controller. Leveraging Lyapunov’s stability principle and finite-time stability theory, it is demonstrated that the system converges within a finite time, ensuring both stability and robustness. Simulation results confirm the proposed controller’s strong resilience against environmental disturbances, such as wind, waves, and currents. The proposed controller exhibits outstanding trajectory tracking performance, enabling the vessel to swiftly and accurately follow reference paths. These findings underscore the controller’s potential to enhance sustainable maritime operations by delivering precise navigation control while simultaneously reducing energy consumption and minimizing environmental impact.
While the study assumes known external disturbances, future research will incorporate the effects of unknown disturbances to further enhance the controller’s robustness and adaptability. This approach holds significant promise for sustainable maritime navigation, contributing to the advancement of more efficient and environmentally friendly ship control systems.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}