1. Introduction
With the continuous growth of global energy demand and the gradual depletion of traditional fossil fuel resources, the research and development of renewable energy sources have become increasingly important [
1]. Renewable energy sources can not only meet future energy demands but also effectively reduce greenhouse gas emissions, which is of great significance for environmental protection [
2]. In recent years, governments around the world and international organizations have formulated policies and set goals to promote the development of renewable energy [
3]. In addition, renewable energy sources have economic and social benefits, as they can create a large number of job opportunities and promote energy independence [
4].
Wind energy, as one of the most promising renewable energy sources, has developed rapidly in recent years [
5]. Onshore wind power technology has become relatively mature, but due to limitations in land resources and environmental impacts, offshore wind power has become a new research hotspot [
6]. Compared with onshore wind power, offshore wind power has advantages such as higher wind speeds, more stable wind directions, and lower noise pollution [
7]. However, as offshore wind power moves into deeper waters, it faces technical challenges and high costs [
8]. To address these issues, scholars have proposed structures such as floating offshore wind turbines (FOWTs). In deep sea, FOWTs can reduce construction and maintenance costs to some extent while increasing power generation efficiency compared to fixed offshore wind turbines [
9].
Compared with fixed offshore wind turbines, FOWTs can be installed in deeper waters and thus have greater development potential [
10]. The design of a FOWT integrates marine engineering and wind power generation technology, enabling it to operate stably in complex marine environments [
11]. However, due to its complex dynamic characteristics and the influence of external environmental loads, the design and operation of a FOWT face many challenges [
12]. For example, changes in waves, ocean currents, and wind speeds can significantly affect the stability of FOWTs, so it is necessary to conduct in-depth research on their dynamic response characteristics to ensure their safety and reliability [
13,
14,
15].
An Extreme Operation Gust (EOG) is an extreme condition that wind turbines may encounter during operation [
16]. This type of gust usually has high wind speeds and a short duration, which can significantly impact the structural safety and operational stability of wind turbines [
17]. Research on the dynamic response under EOG conditions is of great significance for optimizing wind turbine design, improving their wind resistance, and extending their service life [
18]. At present, research on EOGs mainly focuses on the establishment of wind speed models, control strategies for wind turbines, and structural analysis. Lakshmanand et al. used deep learning models for experimental and numerical gust identification [
19]. Alam et al. studied the structural integrity of offshore wind turbine blades under extreme gusts and normal operating conditions [
20]. Wang et al. conducted a coupled dynamic analysis of the mooring system of floating wind turbines under extreme gusts and analyzed the effects of different gust durations and gust magnitudes on the response of the FOWT system [
21]. Zhang et al. studied the mooring line breakage mechanism and shutdown opportunity analysis of semi-submersible offshore wind turbines under extreme gusts [
22].
To cope with extreme wind conditions, wind turbines usually adopt a shutdown strategy [
23]. Different shutdown strategies have a significant impact on the dynamic response of wind turbines. For example, under EOG conditions, the angle adjustment of the blades, the control of the yaw system, and the stability of the tower are all affected by the shutdown strategy. Therefore, studying the dynamic response of FOWT under different shutdown strategies in EOG conditions is of great significance for optimizing wind turbine design and operation strategies.
In this work, under the condition of gust action, the influence of different unit control strategies on the dynamic response of floating wind turbines is innovatively considered, and the dynamic response performance of different intervals of gust action is analyzed in detail in combination with the unit control mechanism. However, there are still limitations. Due to the length limitation of the article, only the following basic motion and mooring tension are analyzed and discussed, and the impact on the performance of the upper unit is not analyzed, which will be discussed in detail.
The organization of this work is as follows.
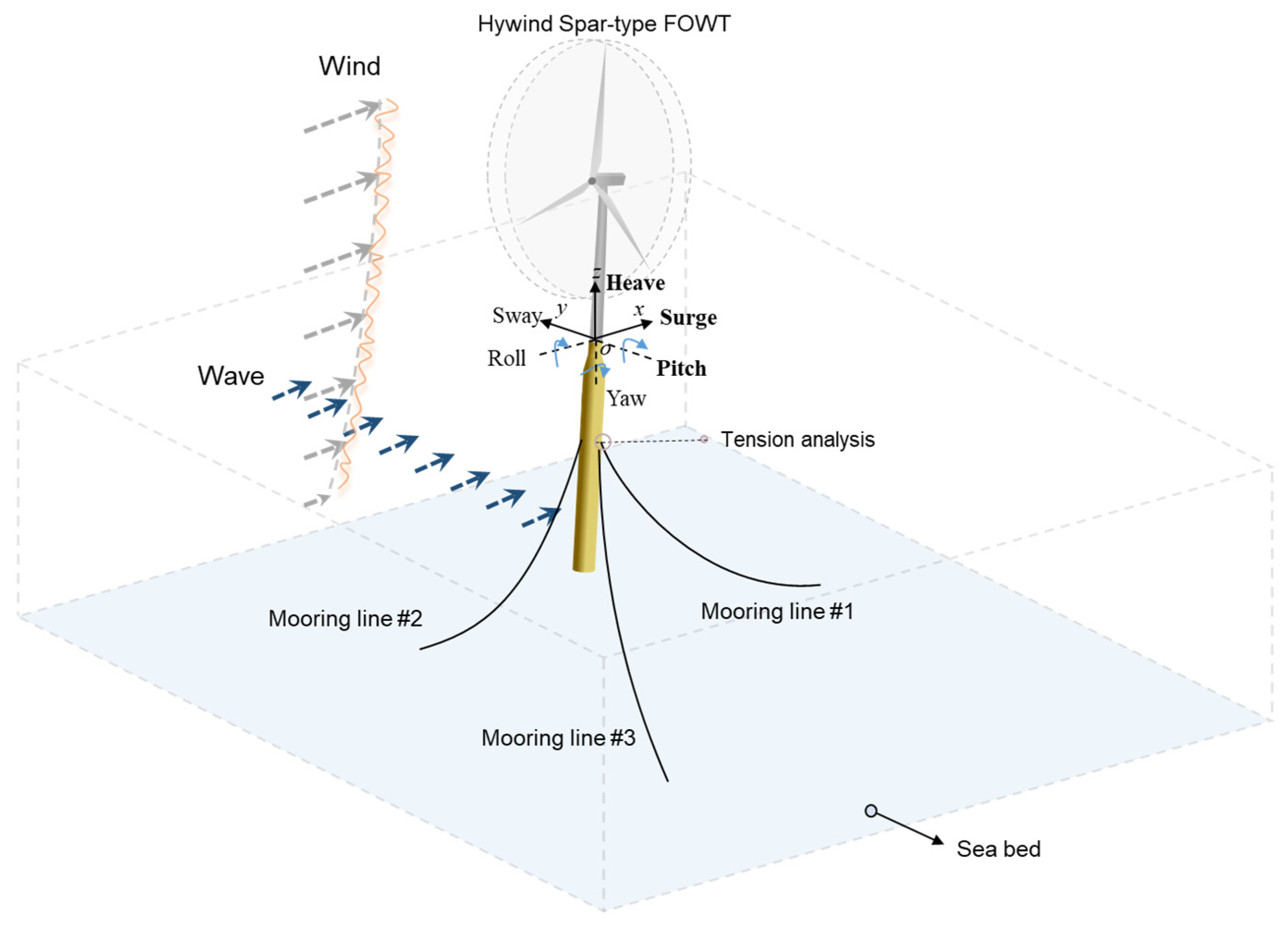
Section 2 offers a characterization of the research subject.
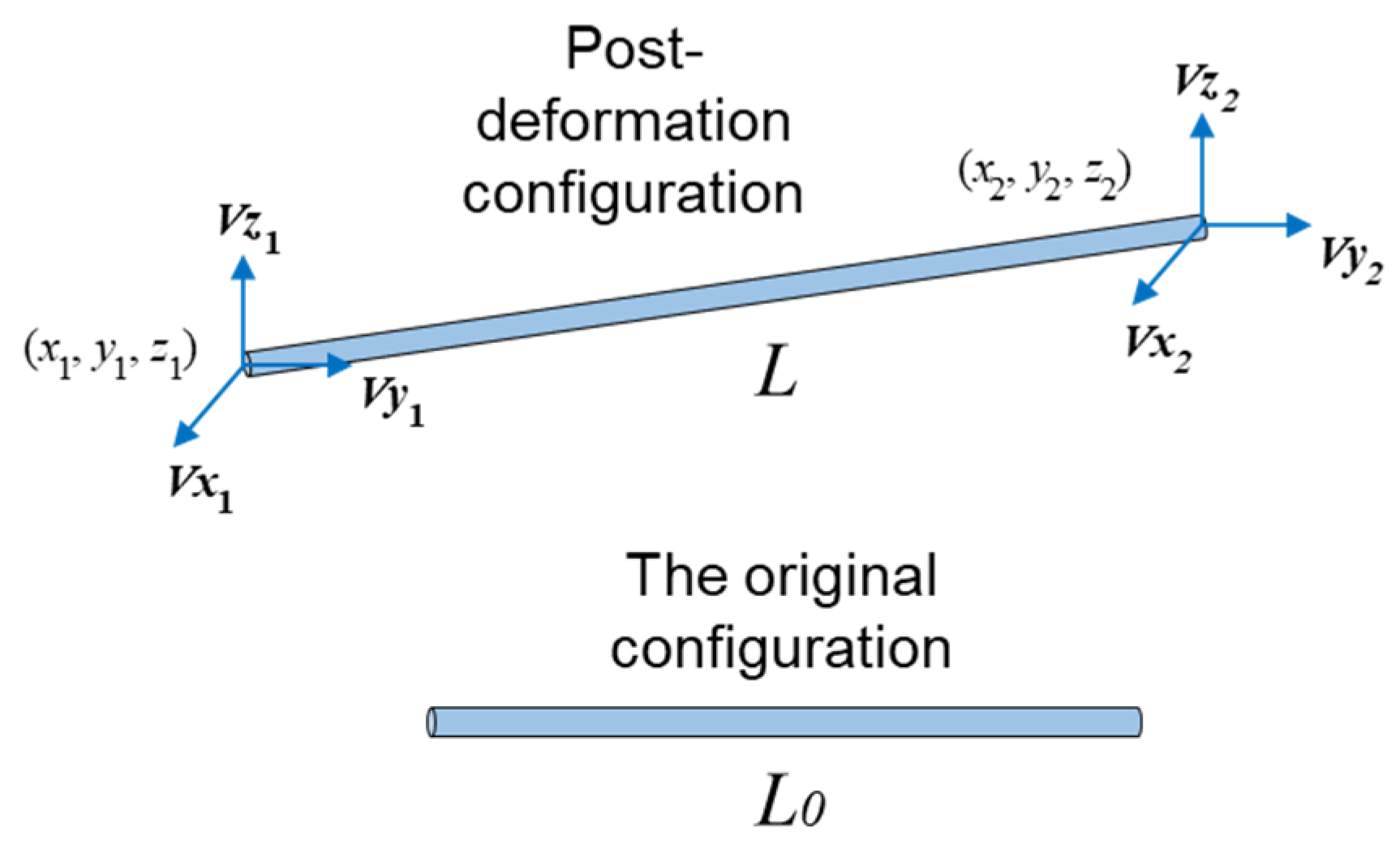
Section 3 outlines the approaches used for generating EOG and analyzing the dynamics of the FOWT.
Section 4 validates the model by comparing it with existing results, thereby verifying its suitability for subsequent analyses.
Section 5 showcases our findings and underscores the significance of the research. Finally,
Section 6 concludes the study, emphasizing key insights and suggesting possible directions for future exploration.
6. Conclusions
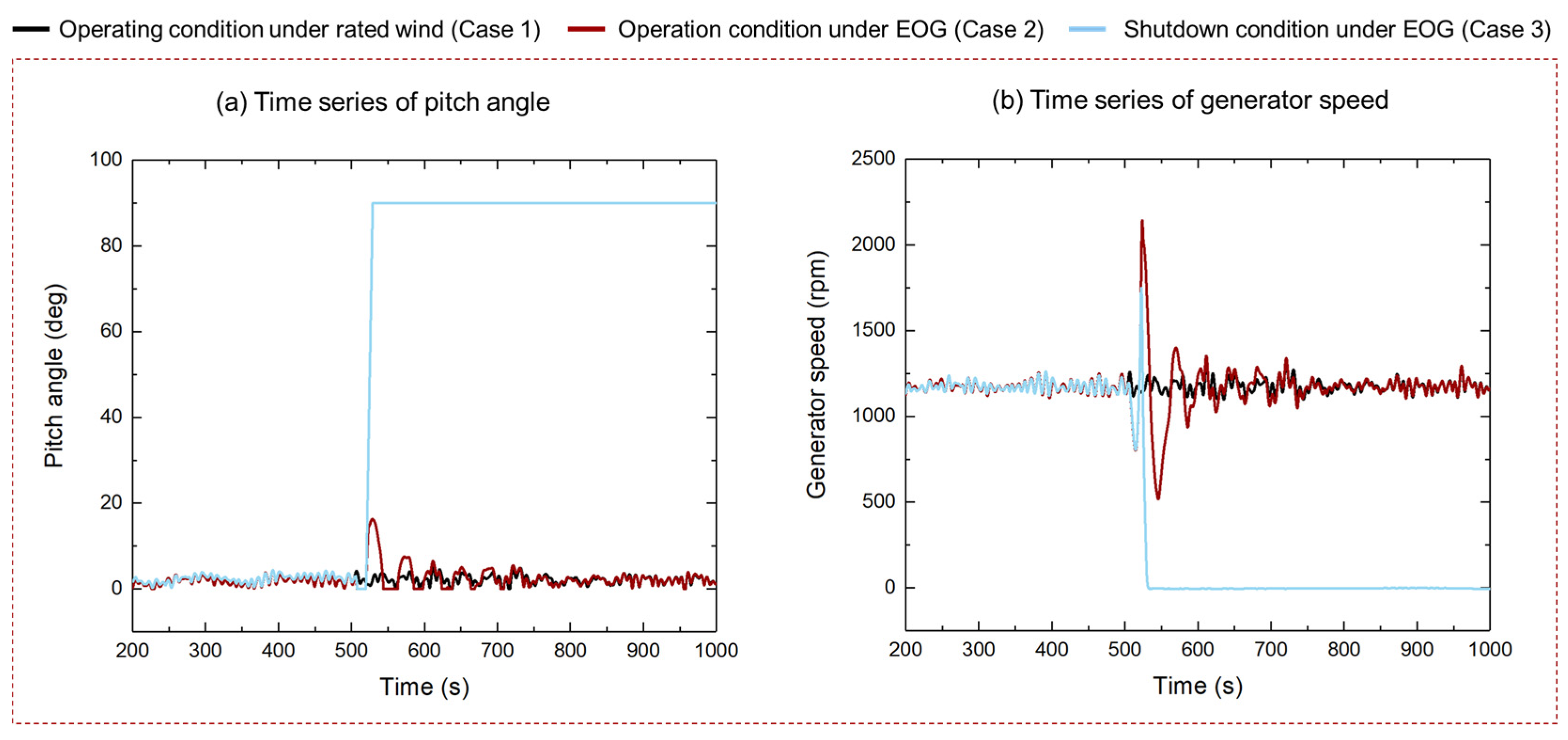
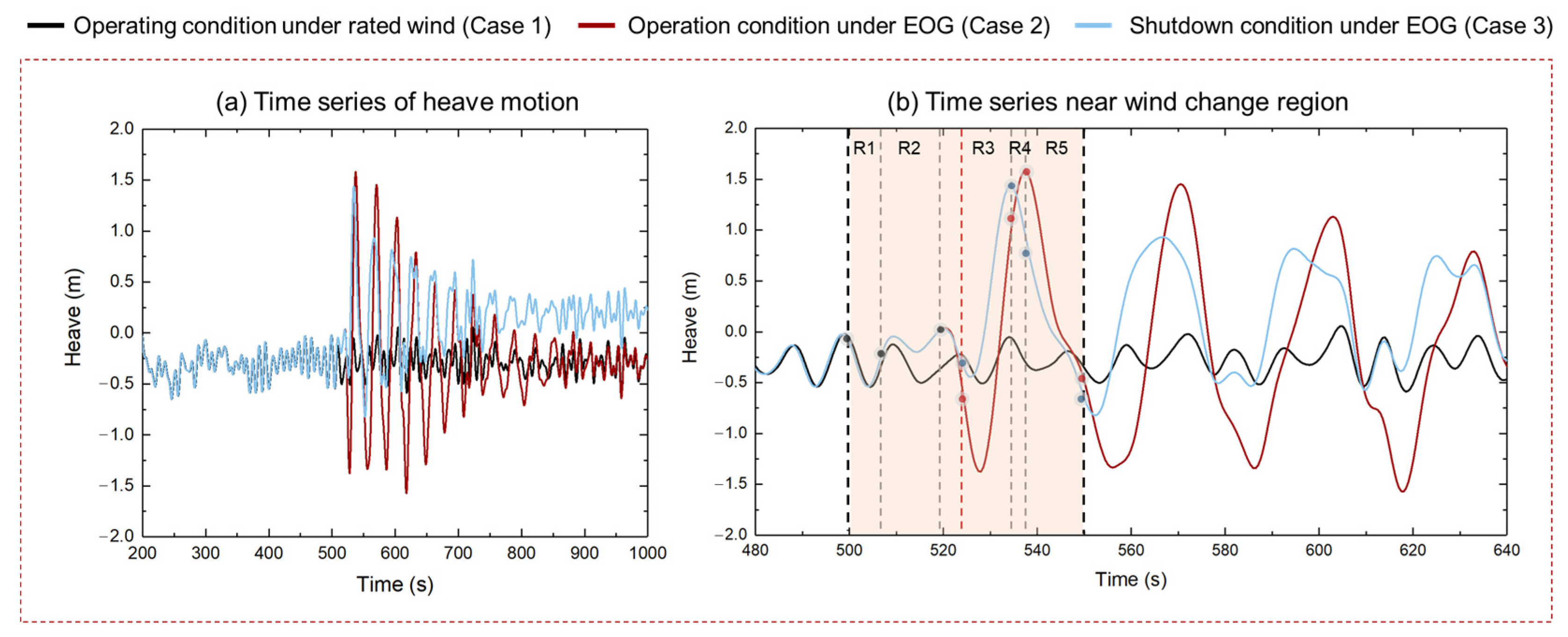
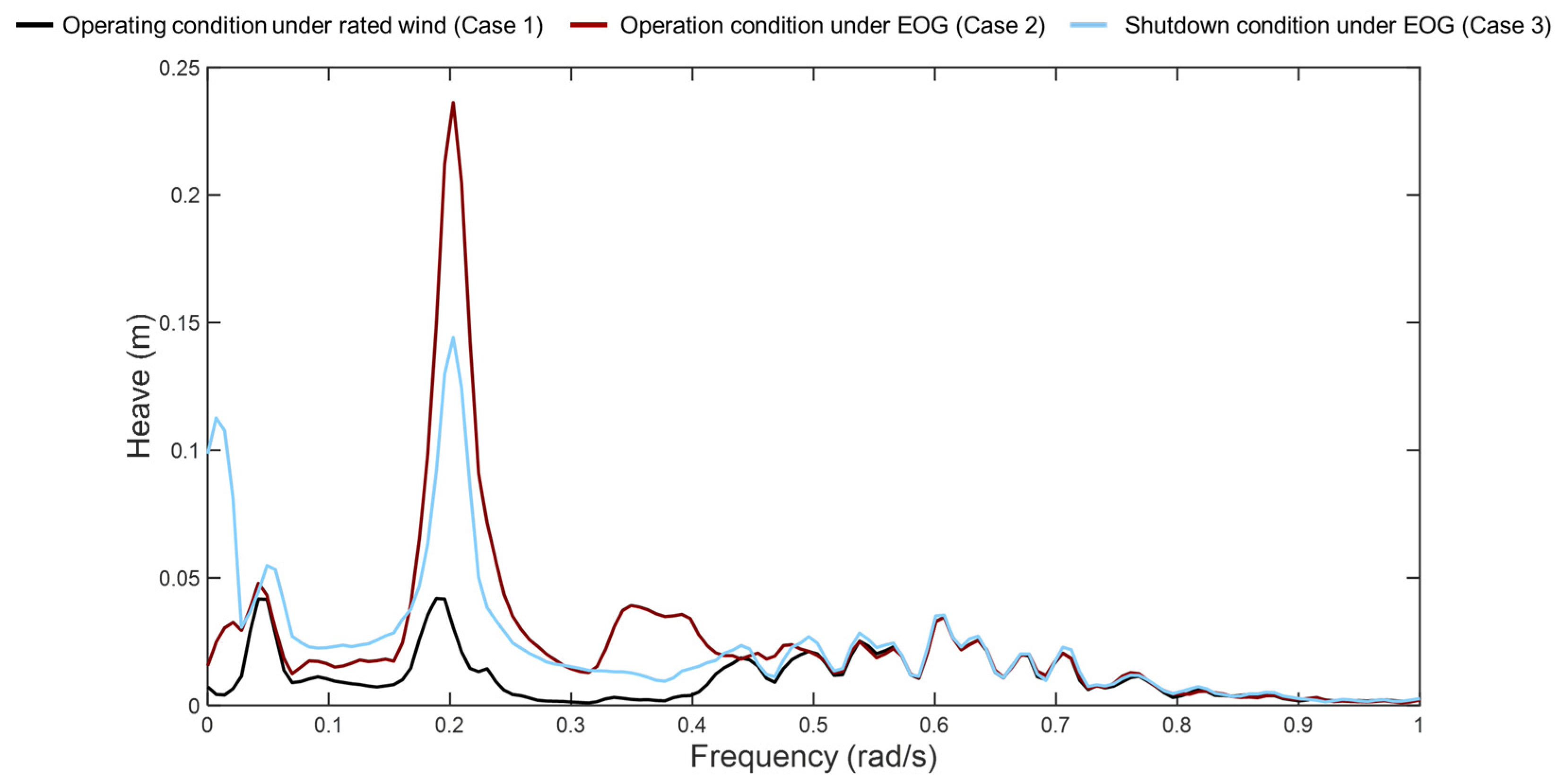
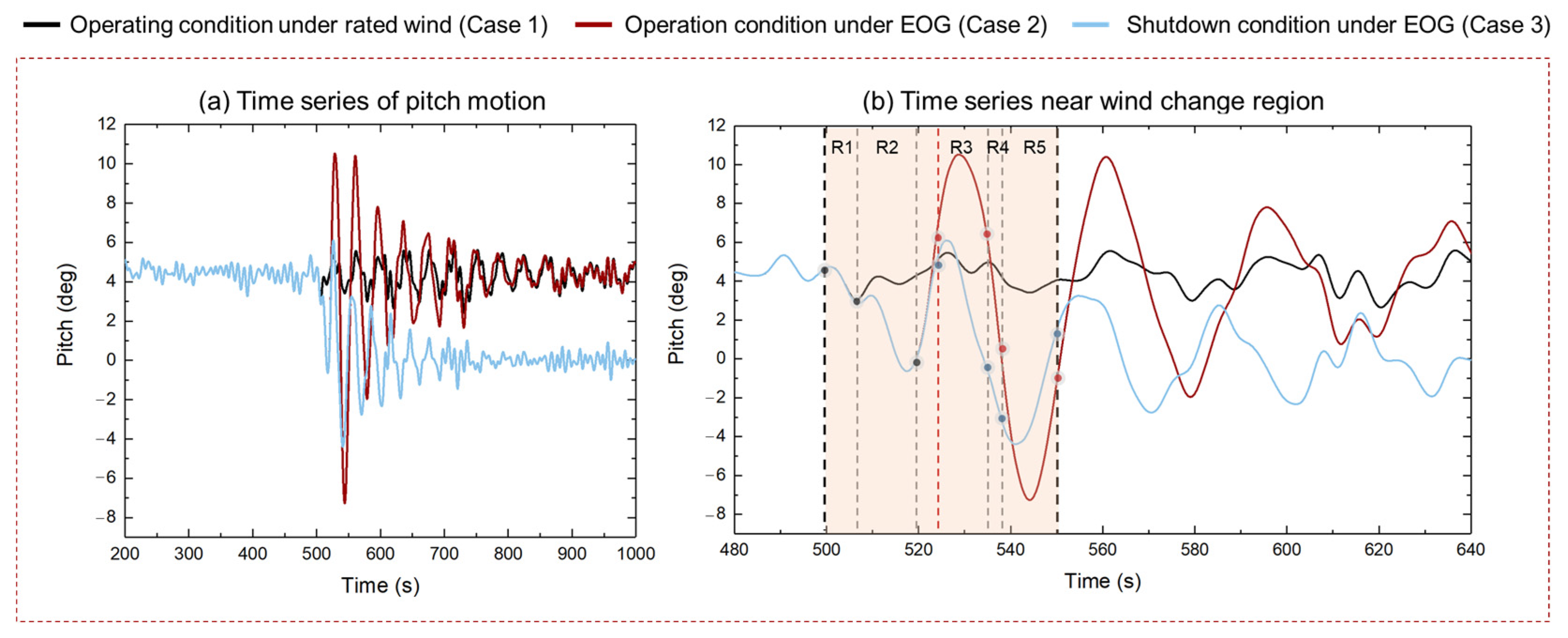
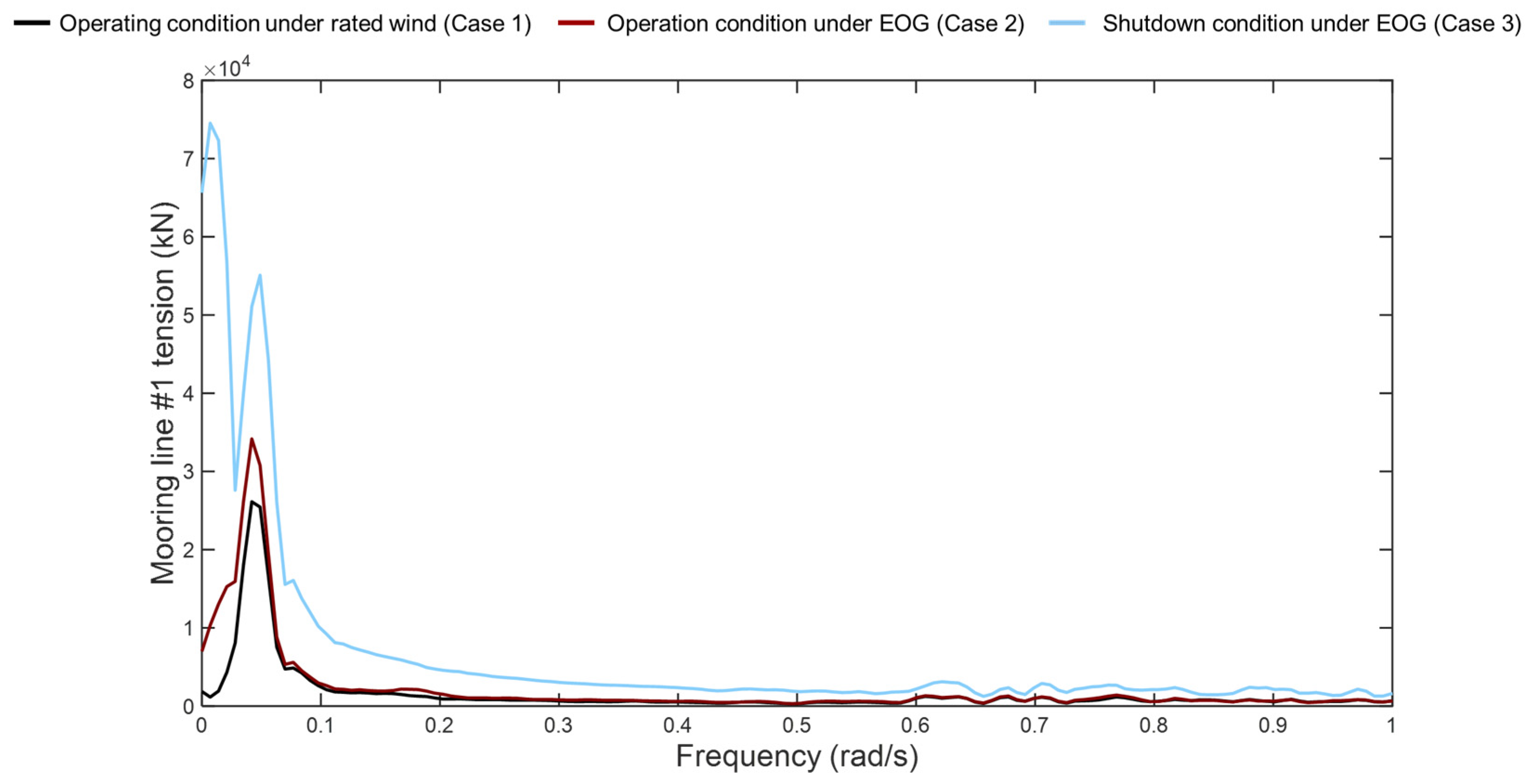
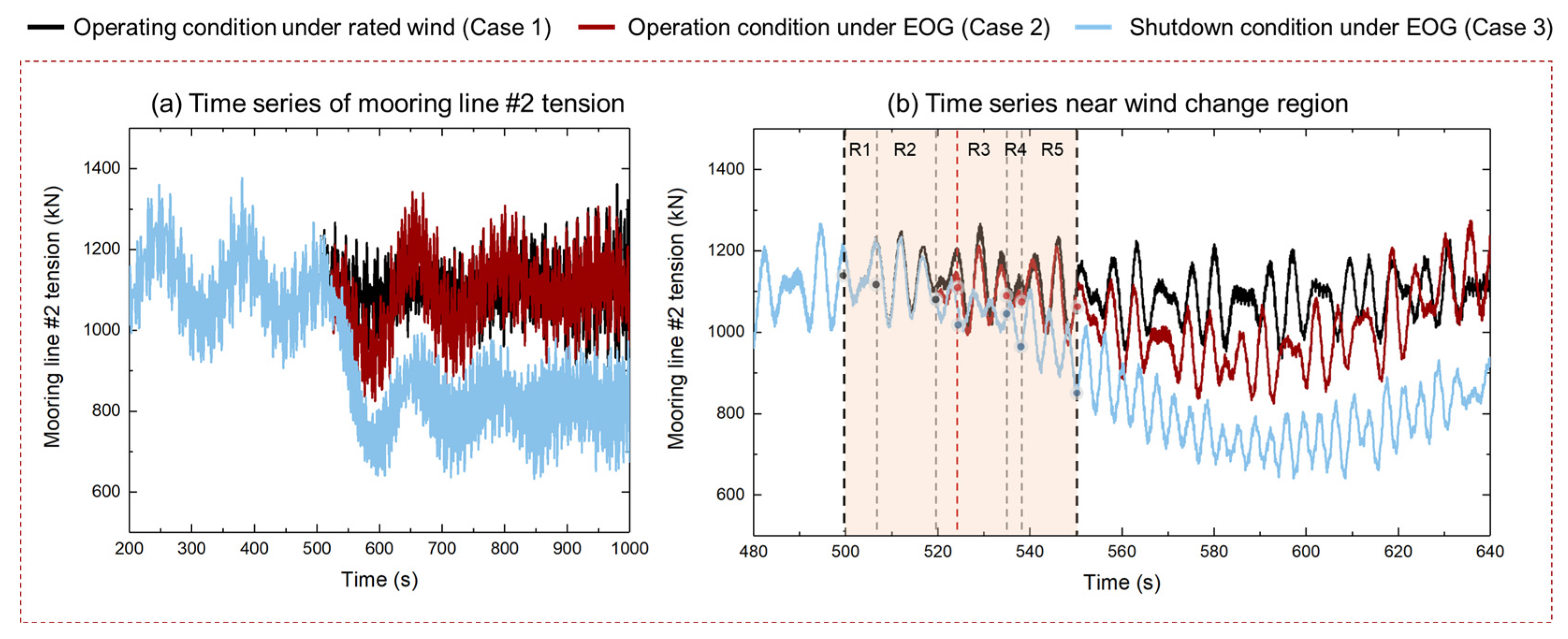
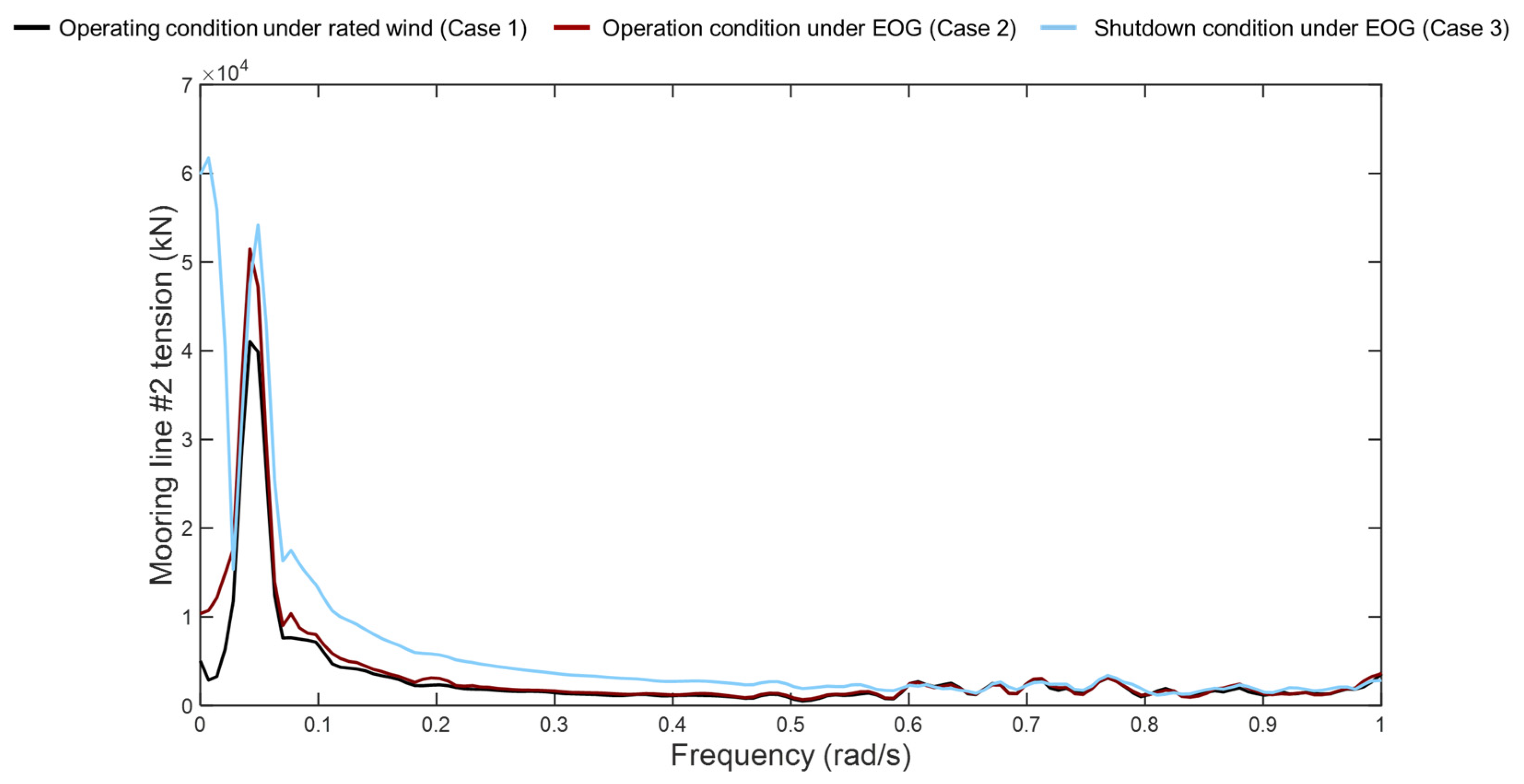
This article deeply analyzes the impact of extreme gust conditions on the dynamic response of floating wind turbines through simulation. The study covers the operating state of the wind turbine under rated wind speed, the operating state under gust influence, and the shutdown state under gust influence. Focusing on the motion of the floating platform and the tension of the mooring lines of the floating wind turbine, this research aims to explore the changes in these key parameters under extreme gust conditions.
The study found that under the influence of extreme gusts, the dynamic response of the wind turbine showed significant changes, especially in the amplitude of response. After the gusts, when a shutdown strategy was adopted, there were significant differences in the mean response of various parts of the wind turbine. Compared with the normal operating state under gust influence, the wind turbine reached the extreme value of response faster and returned to a stable state more quickly under the shutdown strategy. The extreme value of response in the normal operating state was larger, especially in pitch motion, showing an overall trend of instability. After adopting the shutdown strategy, the amplitude of the swing was significantly reduced. Under the influence of gusts, no failure or breakage occurred in the mooring lines. The shutdown strategy reduced the horizontal movement of the floating wind turbine, resulting in a decrease in tension of line# 2 and an increase in tension of line #1.
This study has some limitations. For example, when designing the shutdown strategy, this paper only considered the shutdown settings during gust influence and did not fully consider the situation where the wind turbine resumes operation after the gusts. At the same time, only the dynamic response of the lower structure was analyzed; future analysis will include the response of the upper blades, tower, and other structures. Additionally, the impact of large-scale wind turbine developments will be studied. Future research will delve deeper into the above content to provide more comprehensive strategies and solutions for the operation of floating wind turbines under extreme weather conditions. In future work, we plan to extend this research to larger-scale FOWTs to evaluate how upscaling impacts EOG-induced dynamics.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}