
Predictive Control for Grid-Forming Single-Stage PV System Without Energy Storage


Abstract
1. Introduction
- (1).
- Integrated predictive modeling: A modified finite control set MPC (FCS-MPC) prediction model is developed by incorporating PV capacitor dynamics, enabling simultaneous AC/DC-side voltage prediction.
- (2).
- GF control reference design: According to the operation region analysis of the PV, a GF P-V droop curve is designed. Considering the low-voltage characteristics of the LVG, the proposed strategy manipulates the output voltage to provide a stable power balance, rather than changing the frequency.
- (3).
- Voltage stability enhancement: A penalty function is incorporated with the predicted DC voltage to eliminate switching states that induce PV voltage collapse. This adjustment ensures enhanced MPPT performance, maintaining output frequency stability under overload conditions.
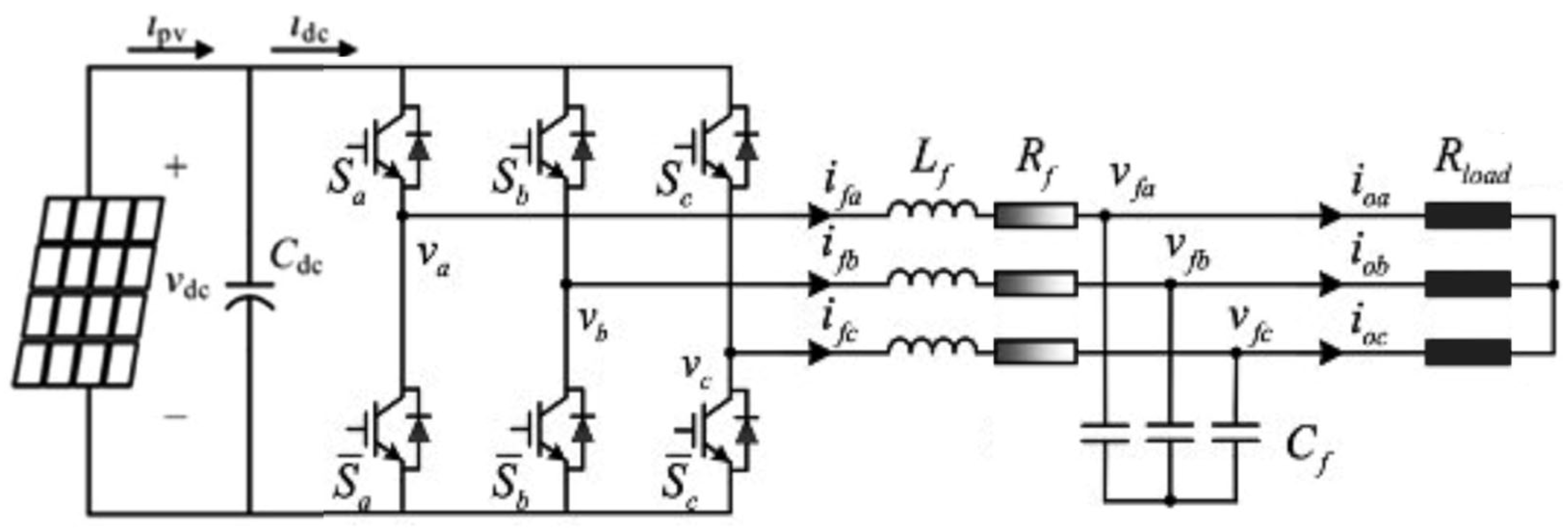
2. Predictive Model of the Single-Stage PV Inverter
3. Proposed Grid-Forming Control Strategy
3.1. Proposed Modified Reference Desgin Under Different Operation
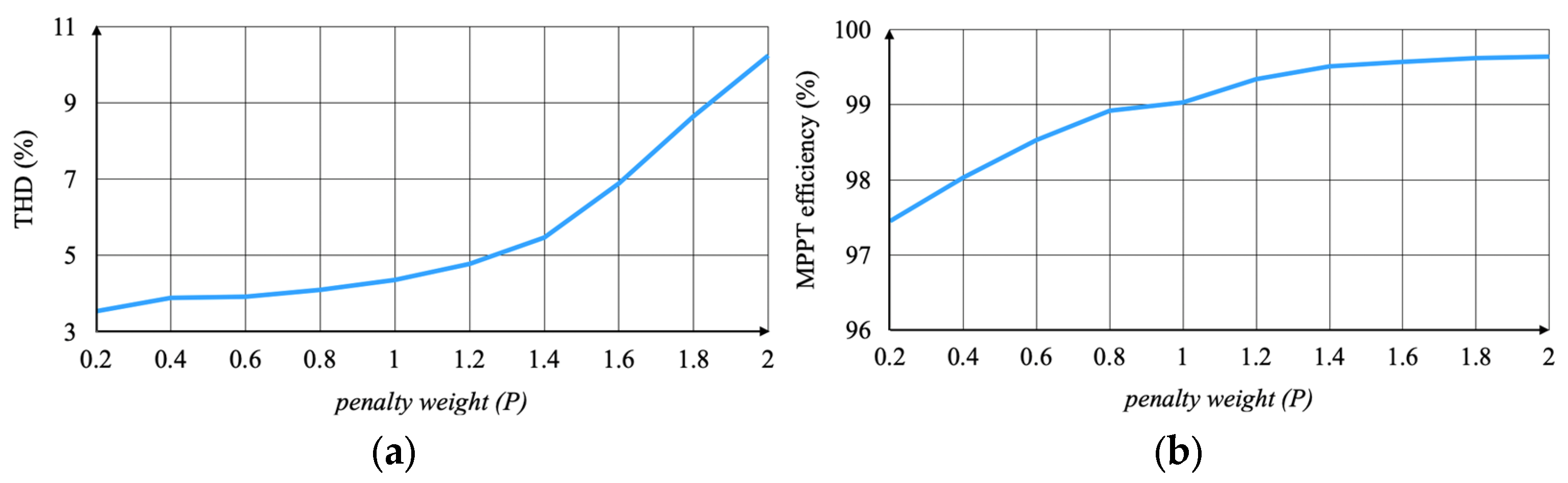
3.2. Proposed Modified Cost Function Under Different Operation
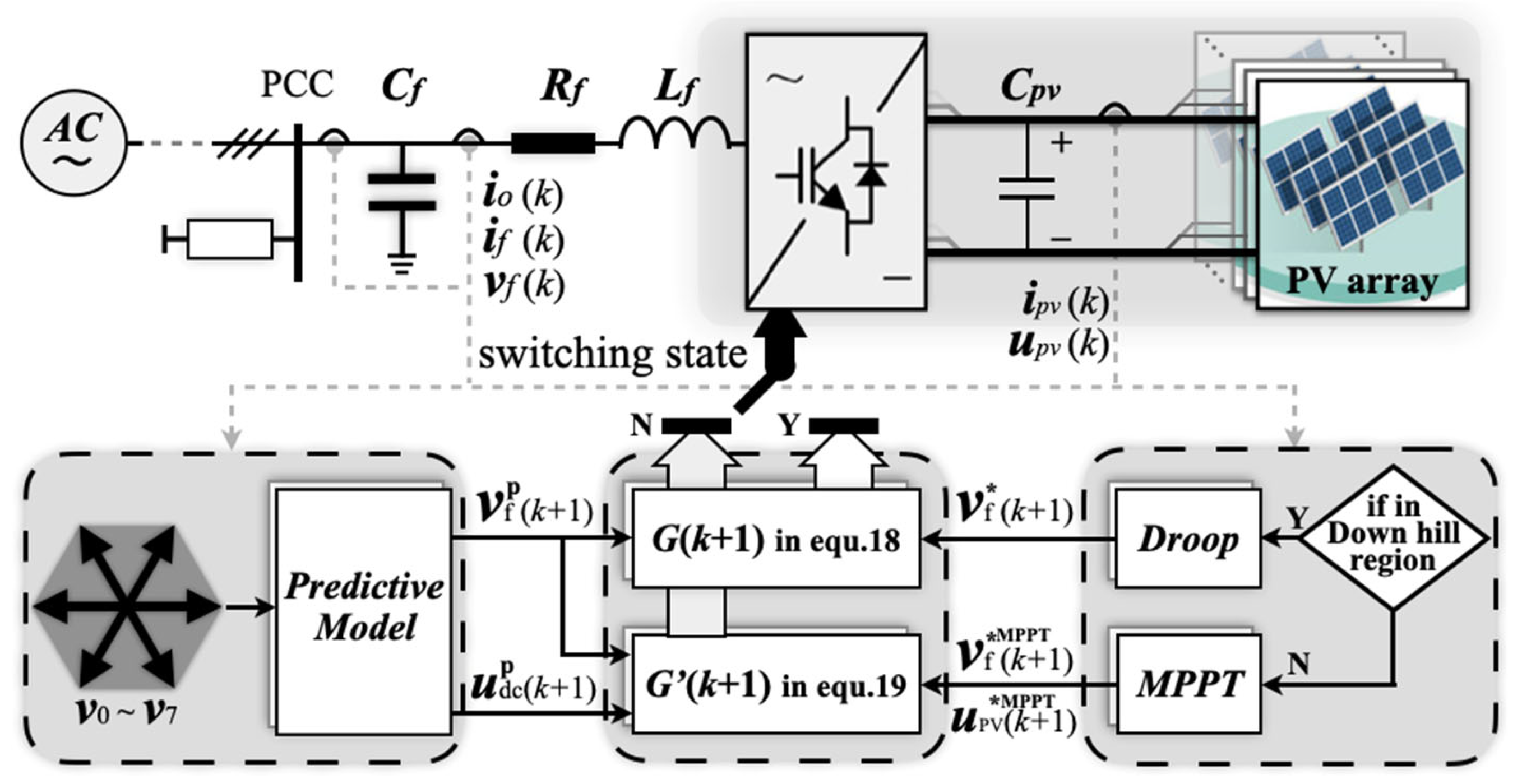
3.3. Proposed Controller
4. Experimental Test Results
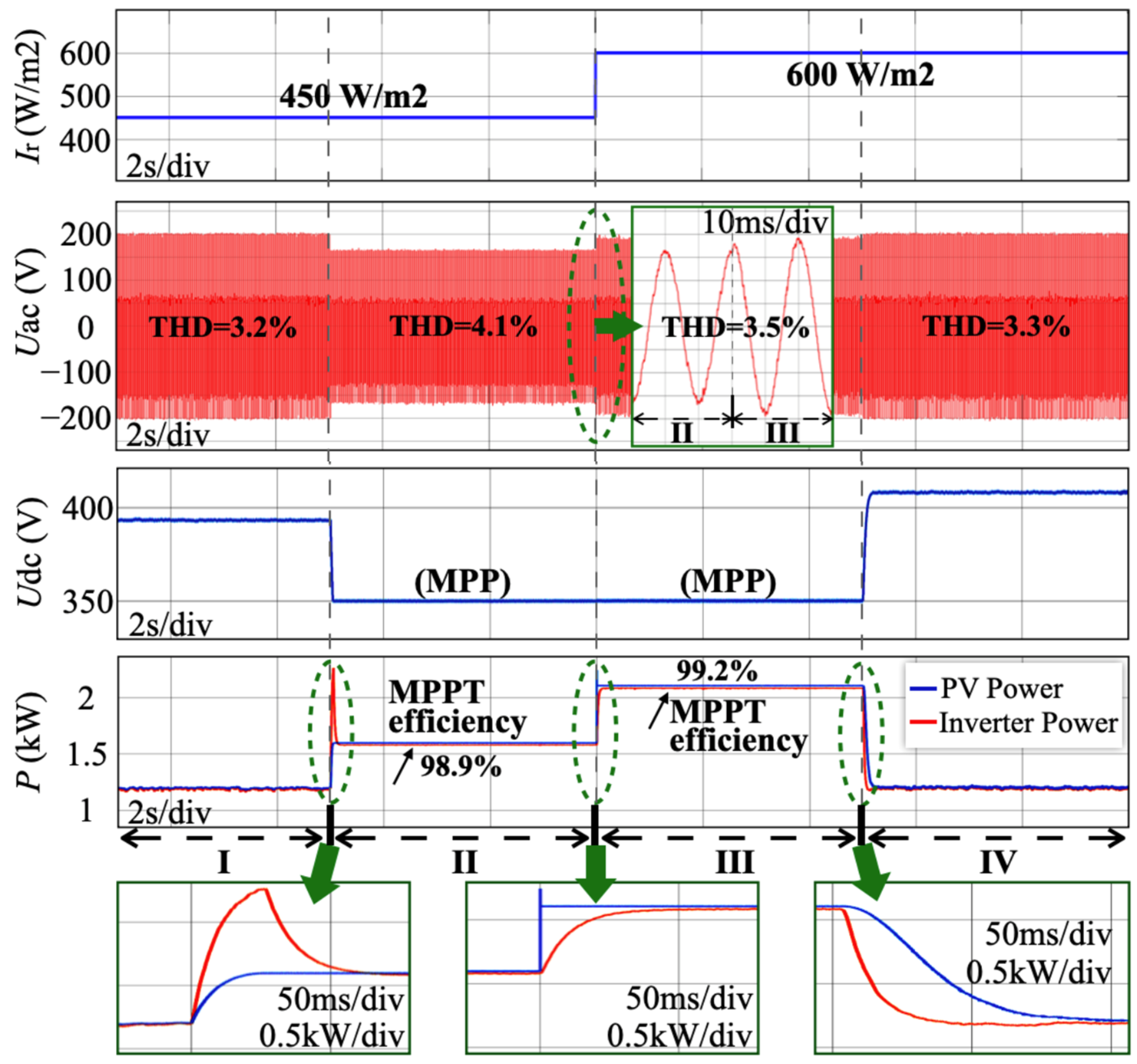
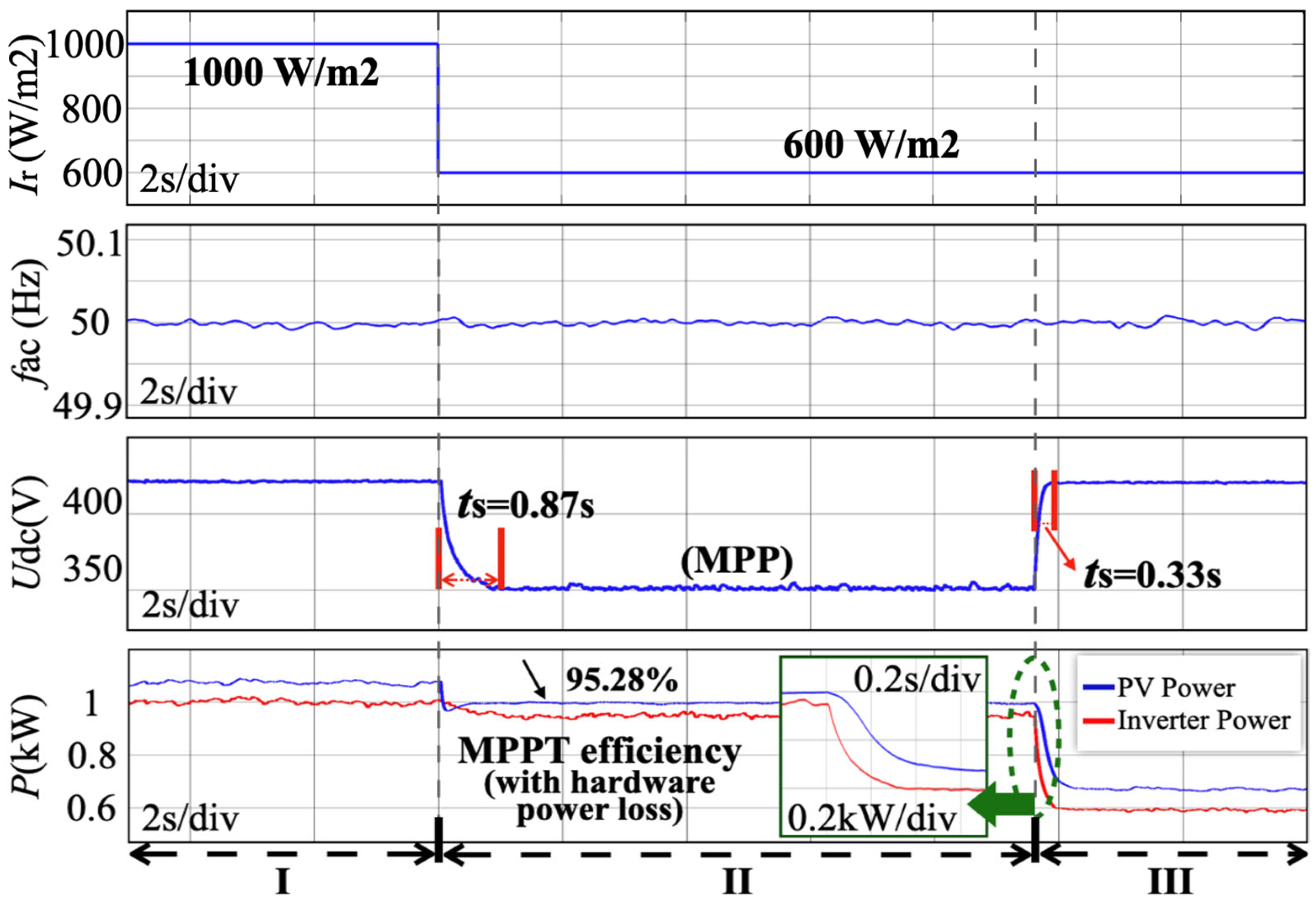
4.1. Dynamic Response to Irradiation and Load Change
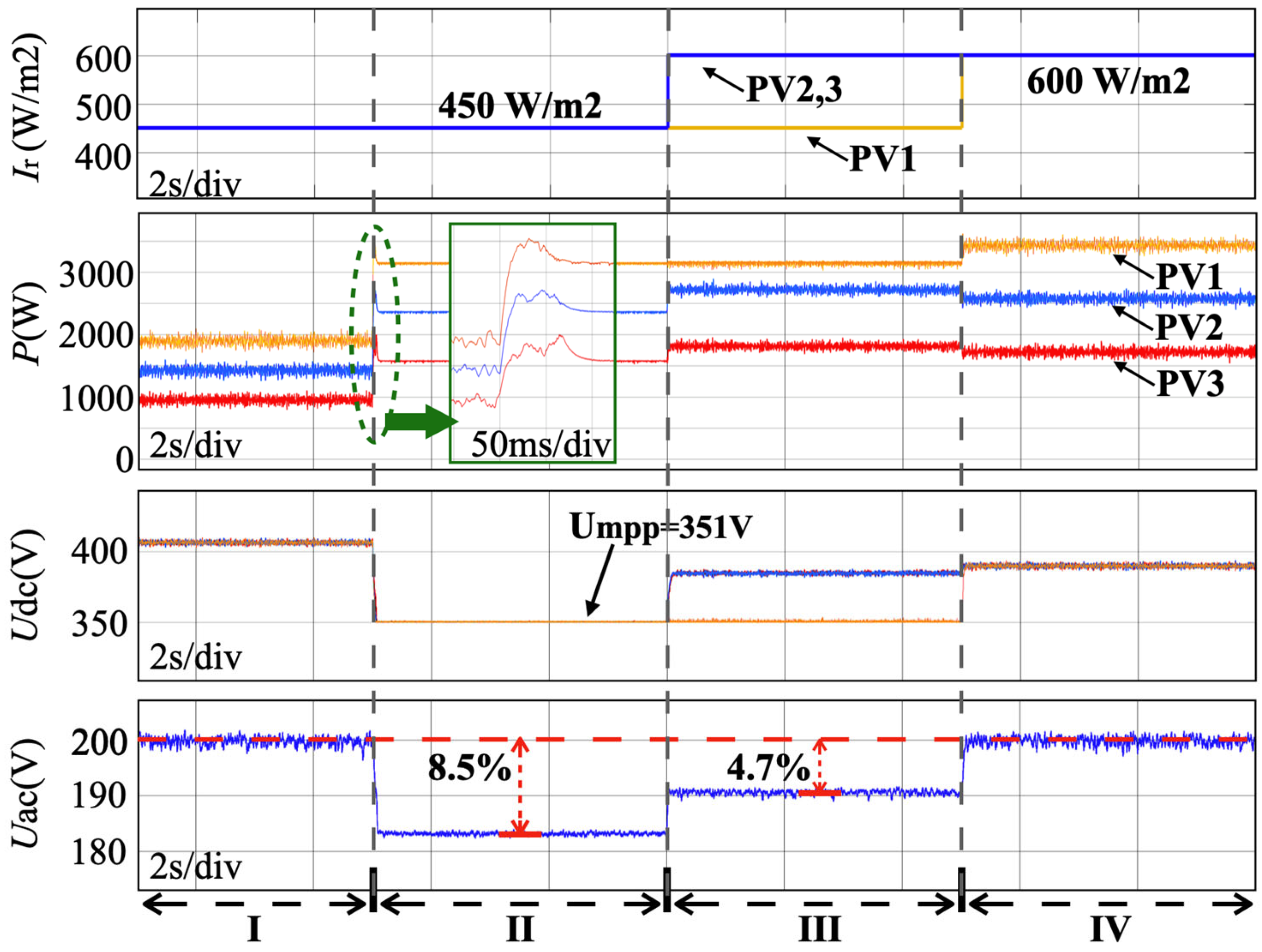
4.2. Multi-PV Sources Grid-Forming Regulation
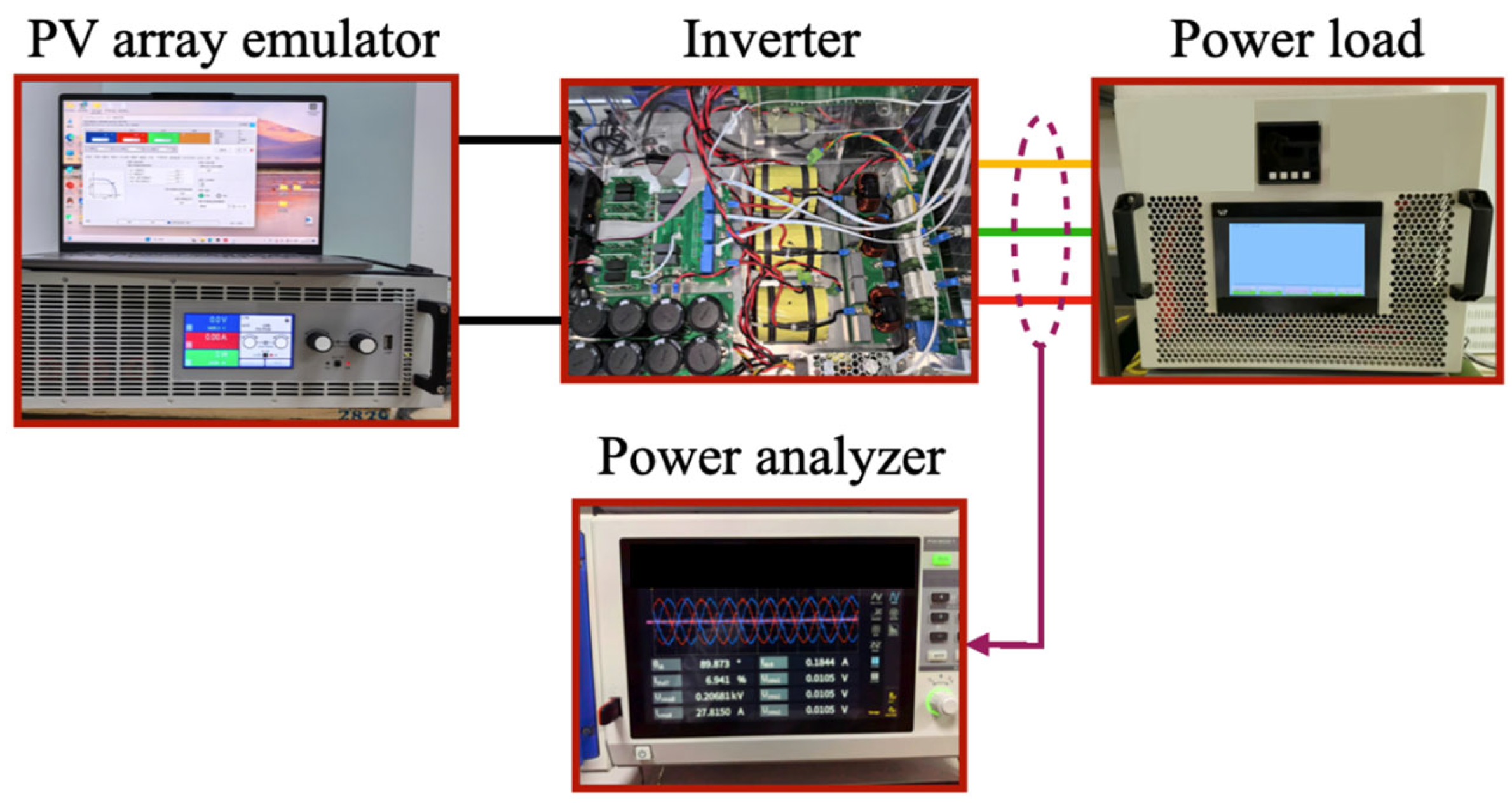
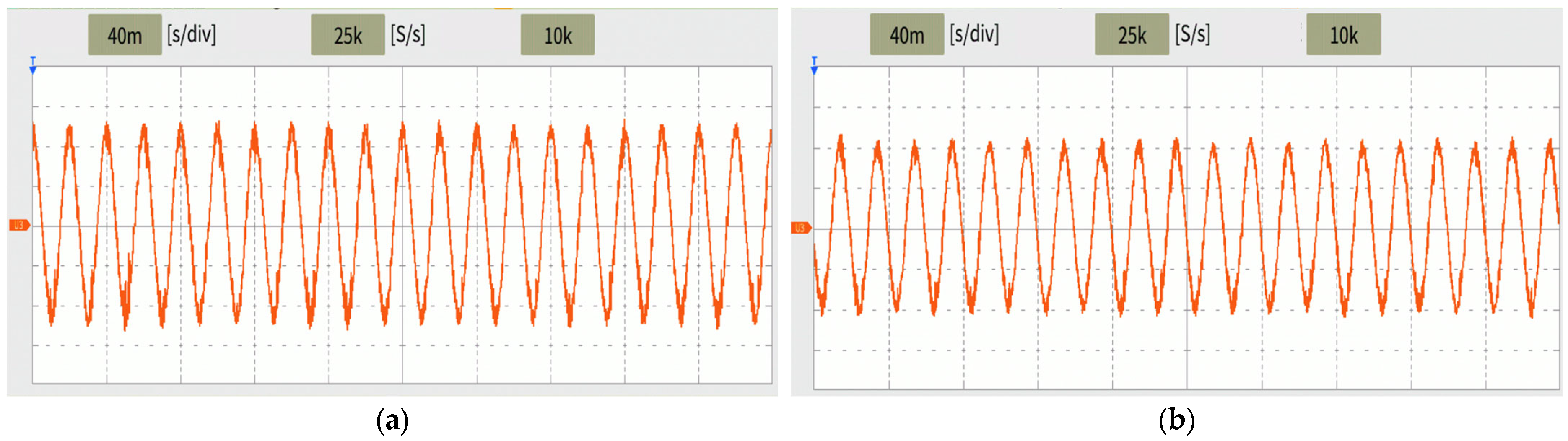
4.3. Hardware Experimental Verification
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rathnayake, D.B.; Akrami, M.; Phurailatpam, C.; Me, S.P.; Hadavi, S.; Jayasinghe, G.; Zabihi, S.; Bahrani, B. Grid forming inverter modeling, control, and applications. IEEE Access 2021, 9, 114781–114807. [Google Scholar] [CrossRef]
- Yan, W.; Shah, S.; Gevorgian, V.; Koralewicz, P.; Wallen, R.; Gao, D.W. On the Low Risk of SSR in Type III Wind Turbines Operating With Grid-Forming Control. IEEE Trans. Sustain. Energy 2024, 15, 443–453. [Google Scholar] [CrossRef]
- Tehrani, K.; Simde, D.; Fozing, J.; Jamshidi, M. A 3D Design of Small Hybrid Farm for Microgrids. In Proceedings of the 2022 World Automation Congress (WAC), San Antonio, TX, USA, 11–15 October 2022; pp. 1–6. [Google Scholar]
- Hernandez, J.C.; Bueno, P.G.; Sanchez-Sutil, F. Enhanced utilityscale photovoltaic units with frequency support functions and dynamic grid support for transmission systems. IET Renew. Power Gener. 2017, 11, 361–372. [Google Scholar] [CrossRef]
- Lu, S.; Xu, Z.; Xiao, L.; Jiang, W.; Bie, X. Evaluation and enhancement of control strategies for VSC stations under weak grid strengths. IEEE Trans. Power Syst. 2017, 33, 1836–1847. [Google Scholar] [CrossRef]
- Rosso, R.; Engelken, S.; Liserre, M. Robust stability investigation of the interactions among grid-forming and grid-following converters. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 991–1003. [Google Scholar] [CrossRef]
- Sun, D.; Liu, H.; Gao, S.; Wu, L.; Song, P.; Wang, X. Comparison of different virtual inertia control methods for inverter-based generators. J. Modern. Power Syst. Clean Energy 2020, 8, 768–777. [Google Scholar] [CrossRef]
- Lin, Y.; Eto, J.H.; Johnson, B.B.; Flicker, J.D.; Lasseter, R.H.; Pico, H.N.V.; Seo, G.-S.; Pierre, B.J.; Ellis, A. Research Roadmap on Grid-Forming Inverters; National Renewable Energy Lab (NREL): Golden, CO, USA, 2020; Volume 1, pp. 1–60. [Google Scholar]
- Tayyebi, A.; Groß, D.; Anta, A.; Kupzog, F.; Dörfler, F. Frequency stability of synchronous machines and grid-forming power converters. IEEE Trans. Emerg. Sel. Top. Power Electron. 2020, 8, 1004–1018. [Google Scholar] [CrossRef]
- Pattabiraman, D.; Lasseter, R.H.; Jahns, T.M. Comparison of grid following and grid forming control for a high inverter penetration power system. In Proceedings of the IEEE PESGM, Portland, OR, USA, 5–10 August 2018; pp. 1–5. [Google Scholar]
- Pawar, B.; Batzelis, E.I.; Chakrabarti, S.; Pal, B.C. Grid-forming control for solar PV systems with power reserves. IEEE Trans. Sustain. Energy 2021, 12, 1947–1959. [Google Scholar] [CrossRef]
- Guo, Z.; Li, K.-J.; Liu, Z.; Li, J.; Song, Y. Reserch on Model Predictive Control-Based Single-Stage Photovoltaic System During Grid. In Proceedings of the 2023 IEEE Industry Applications Society Annual Meeting (IAS), Nashville, TN, USA, 29 October–2 November 2023. [Google Scholar]
- Chen, Z.; Lasseter, R.H.; Jahns, T.M. Power reserve for grid-forming PV sources with stability enhancement in mixed-source microgrids. In Proceedings of the IEEE PESGM, Atlanta, GA, USA, 4–8 August 2019; pp. 1–5. [Google Scholar]
- Rasoanarivo, I.; Tehrani, K.; Scalcon, F.P.; Nahid-Mobarakeh, B. A Dual Multilevel Adaptive Converter for Microgrid Applications. In Proceedings of the IECON 2022—48th Annual Conference of the IEEE Industrial Electronics Society, Brussels, Belgium, 17–20 October 2022; pp. 1–6. [Google Scholar]
- Elkhatib, M.E.; Du, W.; Lasseter, R.H. Evaluation of inverter-based grid frequency support using frequency-watt and grid-forming PV inverters. In Proceedings of the IEEE PESGM, Portland, OR, USA, 5–10 August 2018; pp. 1–5. [Google Scholar]
- Lasseter, R.H.; Chen, Z.; Pattabiraman, D. Grid-forming inverters: A critical asset for the power grid. IEEE Trans. Emerg. Sel. Top. Power Electron. 2019, 8, 925–935. [Google Scholar] [CrossRef]
- Ding, L.; Xue, N.; Qu, Z. Grid-forming Control of Single- and Two-Stage Solar PV Systems with Mode Transition. In Proceedings of the 2023 IEEE Applied Power Electronics Conference and Exposition (APEC), Orlando, FL, USA, 19–23 March 2023; pp. 960–965. [Google Scholar]
- Yang, P.; Xia, Y.; Yu, M.; Wei, W.; Peng, Y. A Decentralized Coordination Control Method for Parallel Bidirectional Power Converters in a Hybrid AC–DC Microgrid. IEEE Trans. Ind. Electron. 2018, 65, 6217–6228. [Google Scholar] [CrossRef]
- Yang, P.; Peng, Y.; Xia, Y.; Wei, W.; Yu, M.; Feng, Q. A unified bus voltage regulation and MPPT control for multiple PV sources based on modified MPC in the DC microgrid. Front. Energy Res. 2022, 10, 1010425. [Google Scholar] [CrossRef]
- Liu, T.; Chen, A.; Qin, C.; Chen, J.; Li, X. Double vector model predictive control to reduce common-mode voltage without weighting factors for three-level inverters. IEEE Trans. Ind. Electron. 2020, 67, 8980–8990. [Google Scholar] [CrossRef]
- Pawar, B.; Chakrabarti, S.; Batzelis, E.I.; Pal, B.C. Grid-Forming Control for Solar PV Systems with Real-Time MPP Estimation. In Proceedings of the 2021 IEEE Power & Energy Society General Meeting (PESGM), Washington, DC, USA, 26–29 July 2021; pp. 1–5. [Google Scholar]
- Batzelis, E.I.; Junyent-Ferre, A.; Pal, B.C. MPP Estimation of PV Systems keeping Power Reserves under Fast Irradiance Changes. In Proceedings of the 2020 IEEE Power & Energy Society General Meeting (PESGM), Montreal, QC, Canada, 2–6 August 2020; pp. 1–5. [Google Scholar]
- Katyal, A.; Pathak, D.; Gaur, P. Smart MPPT Approach using Prominent Metaheuristic Algorithms for Solar PV Panel. In Proceedings of the 2022 IEEE Delhi Section Conference (DELCON), New Delhi, India, 11–13 February 2022; pp. 1–11. [Google Scholar]
- Kouro, S.; Cortes, P.; Vargas, R.; Ammann, U.; Rodriguez, J. Model Predictive Control—A Simple and Powerful Method to Control Power Converters. IEEE Trans. Ind. Electron. 2009, 56, 1826–1838. [Google Scholar] [CrossRef]
- Zeng, Z.; Chen, D.; Qin, S.; Yuan, S.; Zou, Z.; Chen, J.; Qi, C. A Model Predictive Control With Grid-Forming Capability for Back-to-Back Converters in Wind Turbine Systems. IEEE Open J. Power Electron. 2024, 5, 1697–1708. [Google Scholar] [CrossRef]
- Vanti, S.; Bana, P.R.; D’Arco, S.; Amin, M. Single-Stage Grid-Connected PV System With Finite Control Set Model Predictive Control and an Improved Maximum Power Point Tracking. IEEE Trans. Sustain. Energy 2022, 13, 791–802. [Google Scholar] [CrossRef]
- Vanti, S.; Bana, P.R.; Amin, M. Single-stage PV System With Multi-Objective Predictive Control Approach. In Proceedings of the IECON 2021—47th Annual Conference of the IEEE Industrial Electronics Society, Toronto, ON, Canada, 13–16 October 2021; pp. 1–6. [Google Scholar]
- Shan, Y.; Hu, J.; Li, Z.; Guerrero, J.M. A Model Predictive Control for Renewable Energy Based AC Microgrids Without Any PID Regulators. IEEE Trans. Power Electron. 2018, 33, 9122–9126. [Google Scholar] [CrossRef]
- Esram, T.; Chapman, P.L. Comparison of photovoltaic array maximum power point tracking techniques. IEEE Trans. Energy Convers. 2007, 22, 439–449. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| inverter filter inductance | Lf | 3 mH |
| inverter filter capacitance | Cf | 20 µF |
| inverter filter resistance | Rf | 0.2 Ω |
| penalty weight | P | 1 |
| PV-side capacitor | Cpv | 1360 µF |
| switching frequency | fsw | 20 kHz |
| grid-forming voltage | 200 V/50 Hz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, X.; Yang, P.; Cai, H.; Li, J.; Xia, Y.; Wei, W. Predictive Control for Grid-Forming Single-Stage PV System Without Energy Storage. Sustainability 2025, 17, 5227. https://doi.org/10.3390/su17115227
Zeng X, Yang P, Cai H, Li J, Xia Y, Wei W. Predictive Control for Grid-Forming Single-Stage PV System Without Energy Storage. Sustainability. 2025; 17(11):5227. https://doi.org/10.3390/su17115227
Chicago/Turabian StyleZeng, Xiao, Pengcheng Yang, Hongda Cai, Jing Li, Yanghong Xia, and Wei Wei. 2025. "Predictive Control for Grid-Forming Single-Stage PV System Without Energy Storage" Sustainability 17, no. 11: 5227. https://doi.org/10.3390/su17115227
APA StyleZeng, X., Yang, P., Cai, H., Li, J., Xia, Y., & Wei, W. (2025). Predictive Control for Grid-Forming Single-Stage PV System Without Energy Storage. Sustainability, 17(11), 5227. https://doi.org/10.3390/su17115227