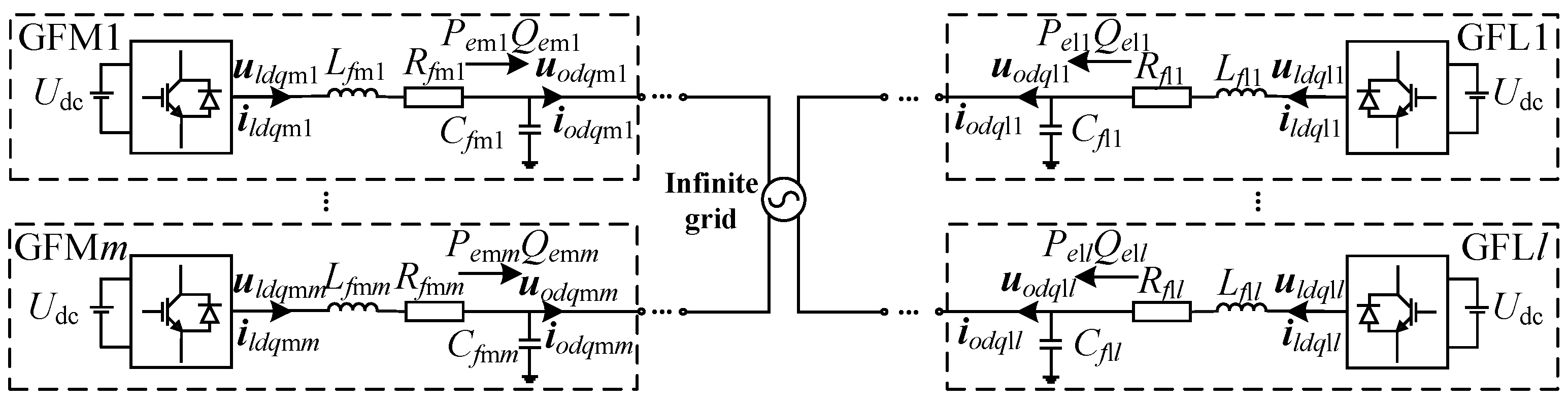
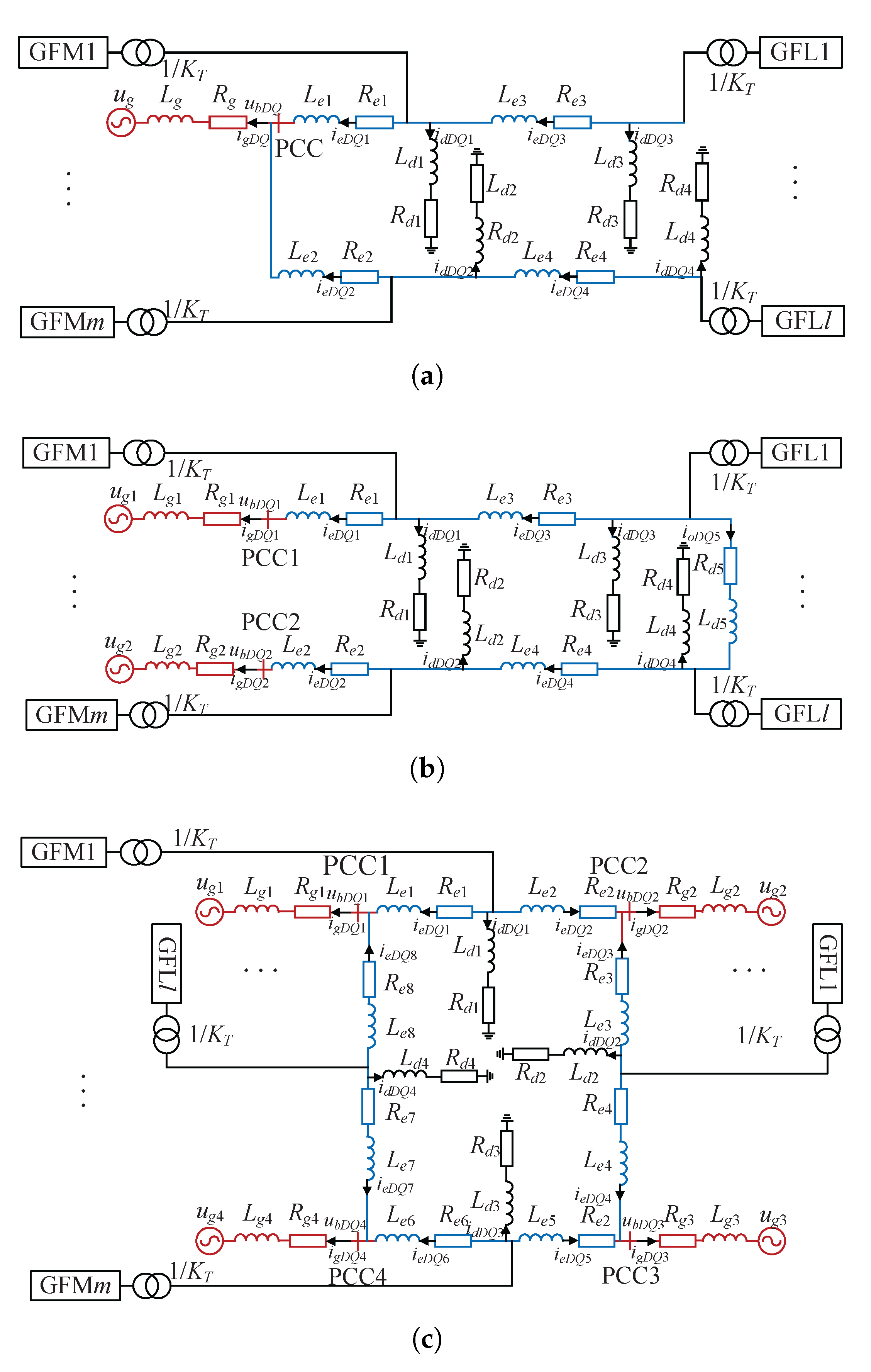
To validate the accuracy of the aforementioned theoretical analysis, the simulation models of the T1-, T2-, and T3-type grids are developed as illustrated in
Figure 4 using Matlab/Simulink. This paper conducts research on two GFM inverters and two GFL inverters. Three grid topology structures adopt identical parameter sets as specified in
Table 1, where
denotes the base power of the system,
and
represent the base voltages of the inverter and the grid, respectively. To simplify the model, the DC-side dynamics of the inverters are neglected and replaced by a constant voltage source
V, producing an AC-side output voltage of 690 V. The grid voltage is set to 10,500 V, resulting in a transformer ratio
= 10,500/690. The load connection powers are denoted as
and
.
4.2. Simulation Validation of Grid Topology Impact on GFL-Dominant Oscillation Modes
In order to analyze the impact of grid topology structure on the dominant oscillation modes of the GFL inverters, the dominant eigenvalues of the GFL inverters are first identified. Based on the initial parameters in
Table 1, gradually increase
and
, and observe that when
and
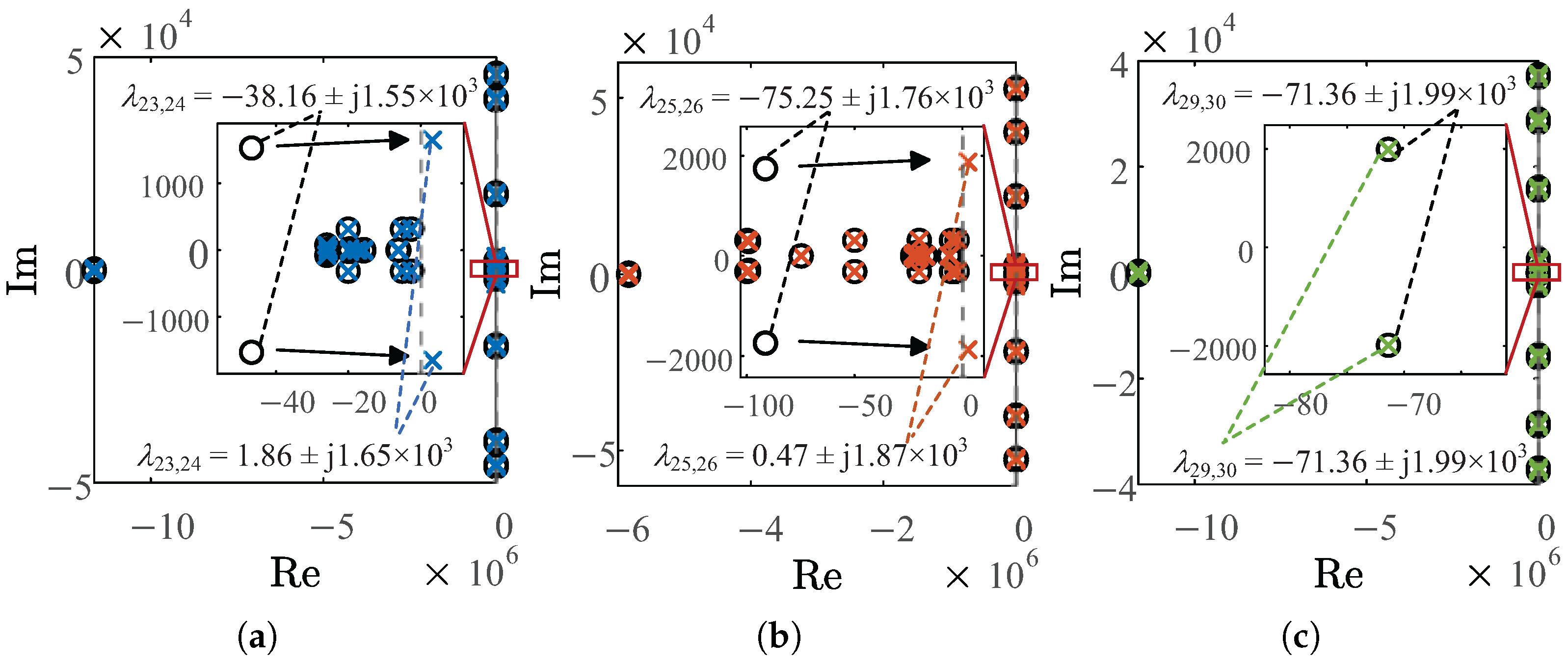
, the full-order eigenvalues of three grid topology structures are shown in
Figure 5a–c. The eigenvalues dominated by GFL inverters in the T1-, T2-, and T3-type topology structures are
,
, and
, respectively. Then, with increments
and
, the increase in the dominant eigenvalues of three grid topology structures can be calculated using Equation (
22), causing
,
, and
, respectively. This demonstrates that increasing
and
shifts the eigenvalues of the system along the real axis toward the right half-plane (RHP), indicating reduced stability margins. Continue to increase
and
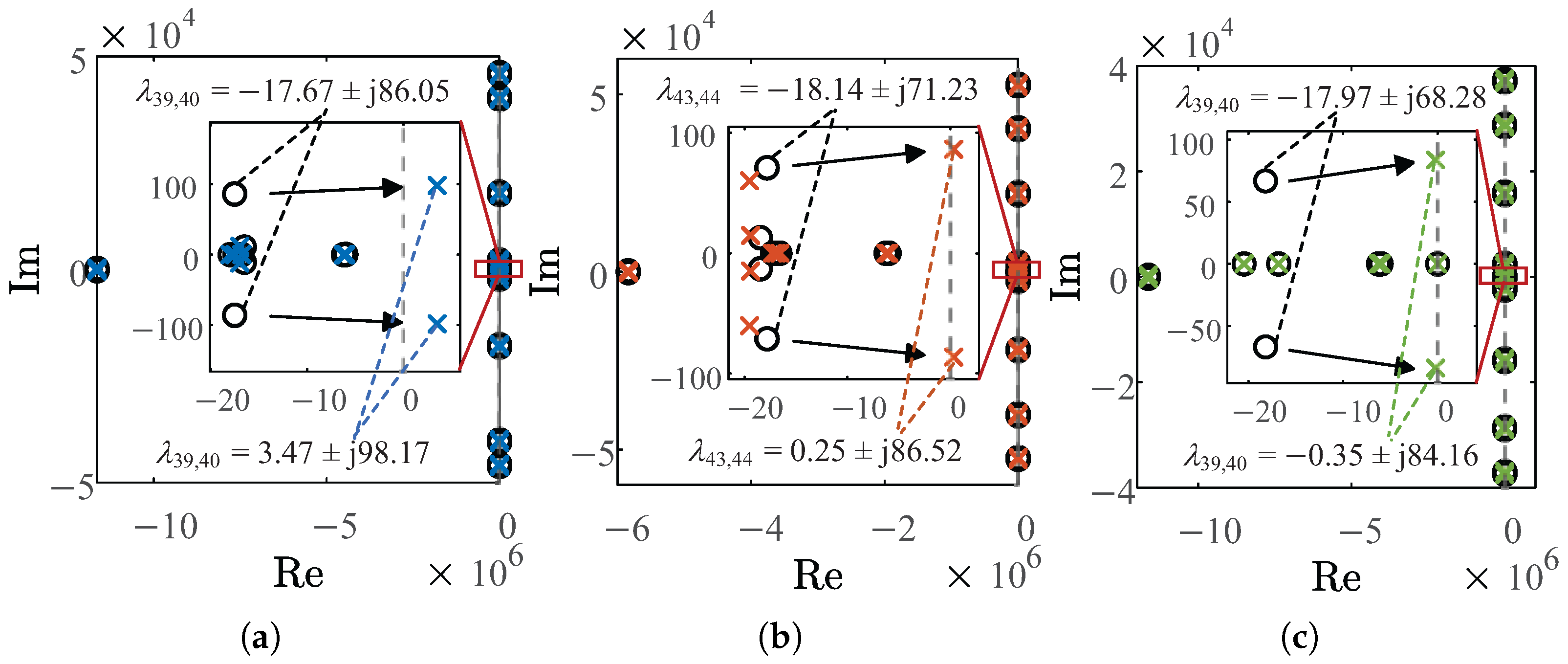
, and the full-order eigenvalues of three grid topology structures are shown in
Figure 5. Under these parameters,
,
, and
, respectively, are listed in
Table 2.
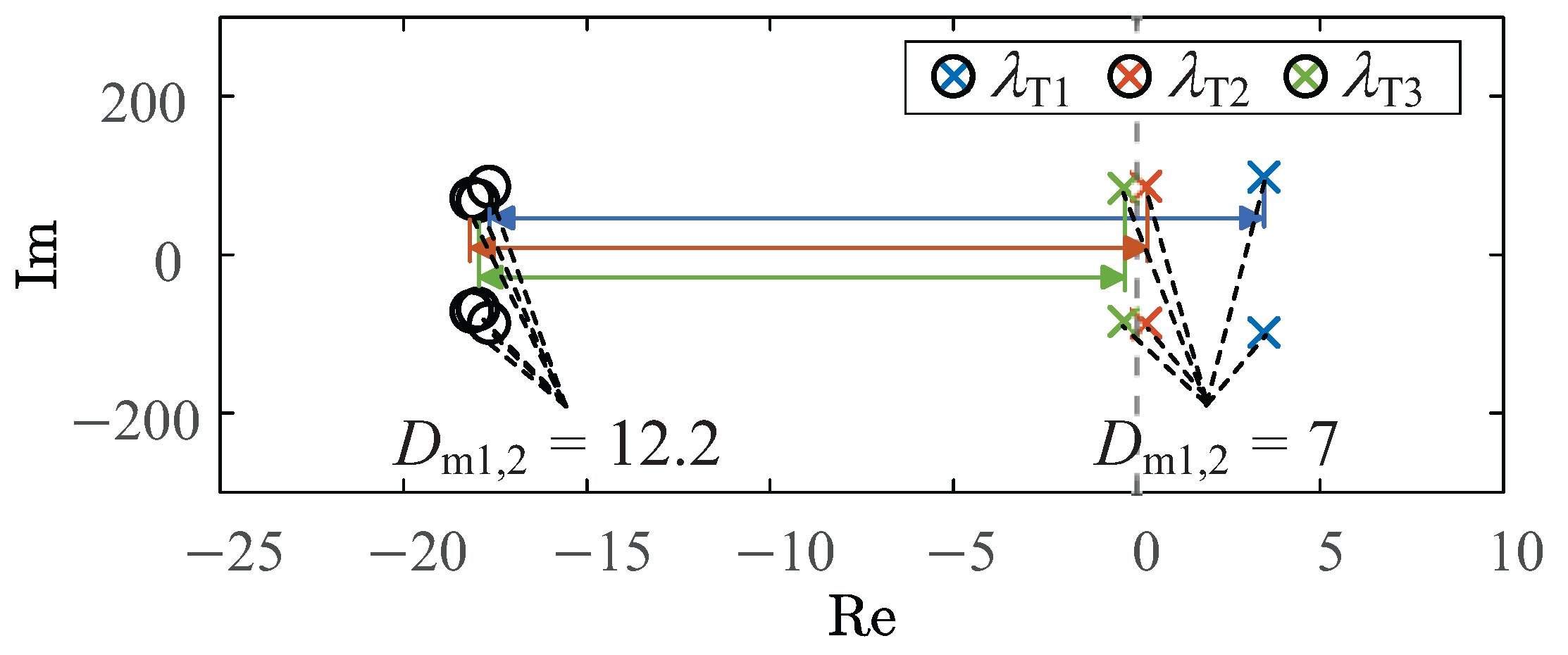
As evidenced in
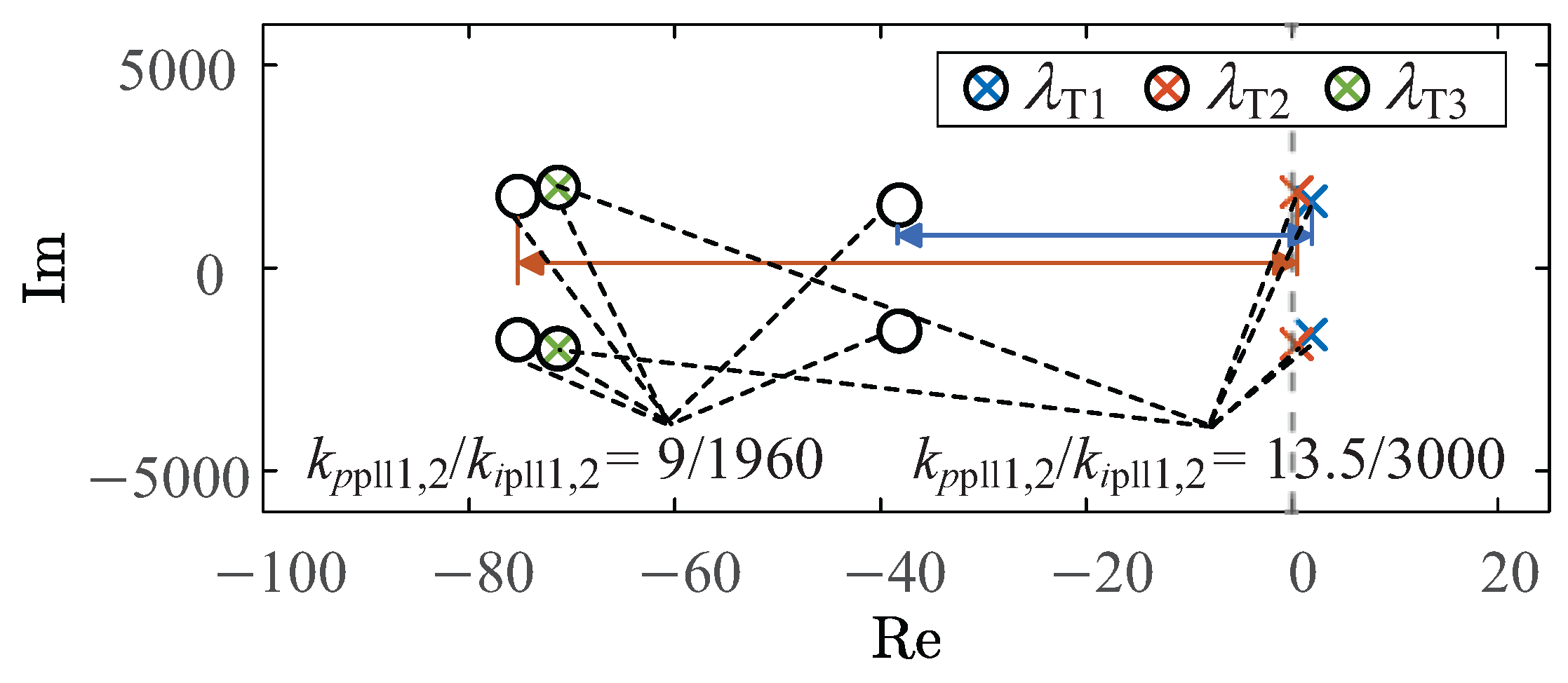
Figure 5, it can be observed that a pair of dominant eigenvalues move to the RHP under three different grid topology structures, whereas other system eigenvalues remain stationary. This observation confirms that the stability characteristics of GFL inverters under different grid topology structures can be effectively characterized by these migrating eigenvalue pairs. To enable focused analysis, we have reconstructed the migration trajectories of these three critical eigenvalue pairs from
Figure 5 into the comparative plot shown in
Figure 6. The distance between points ‘o’ and ‘x’ in the
Figure 6 represents the stability region of eigenvalues when GFL inverters undergo identical parameter variations under three grid topology structures.It can be observed that with increasing proportional and integral coefficients of the PLL, the eigenvalues of both grid topology structures are shifted right along the real axis, consistent with the eigenvalue variation analysis
presented earlier. Observing
Figure 6, it can be seen that, under the same initial parameters
and
, the eigenvalues of T1-type grid topology structure are the farthest to the right. Under the same parameter variations, the real parts of the eigenvalues in the T1-type grid are the first to cross the imaginary axis, followed by those in the T2-type grid. By observing the eigenvalue trajectories of three grid topology structures under the same parameter variations, it can be seen that the feasible parameter domain of the T1-type grid is smaller than that of the T2-type grid. For the T3-type grid, its eigenvalues remain invariant under parameter variations. This demonstrates that GFL inverters in T3-type grid topology structure exhibit high stability and robustness. That is, GFL inverters possess a larger feasible region under strong grid conditions.
Under the operating conditions of
and
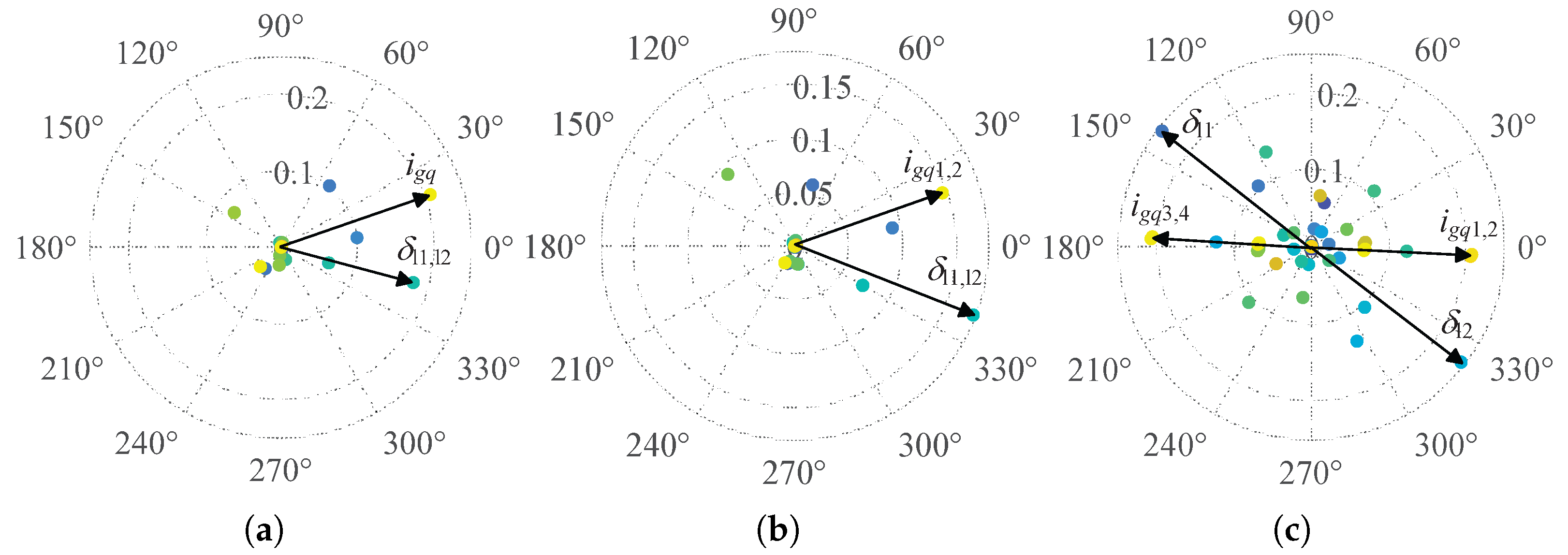
, the small signal analysis of eigenvalues is presented in
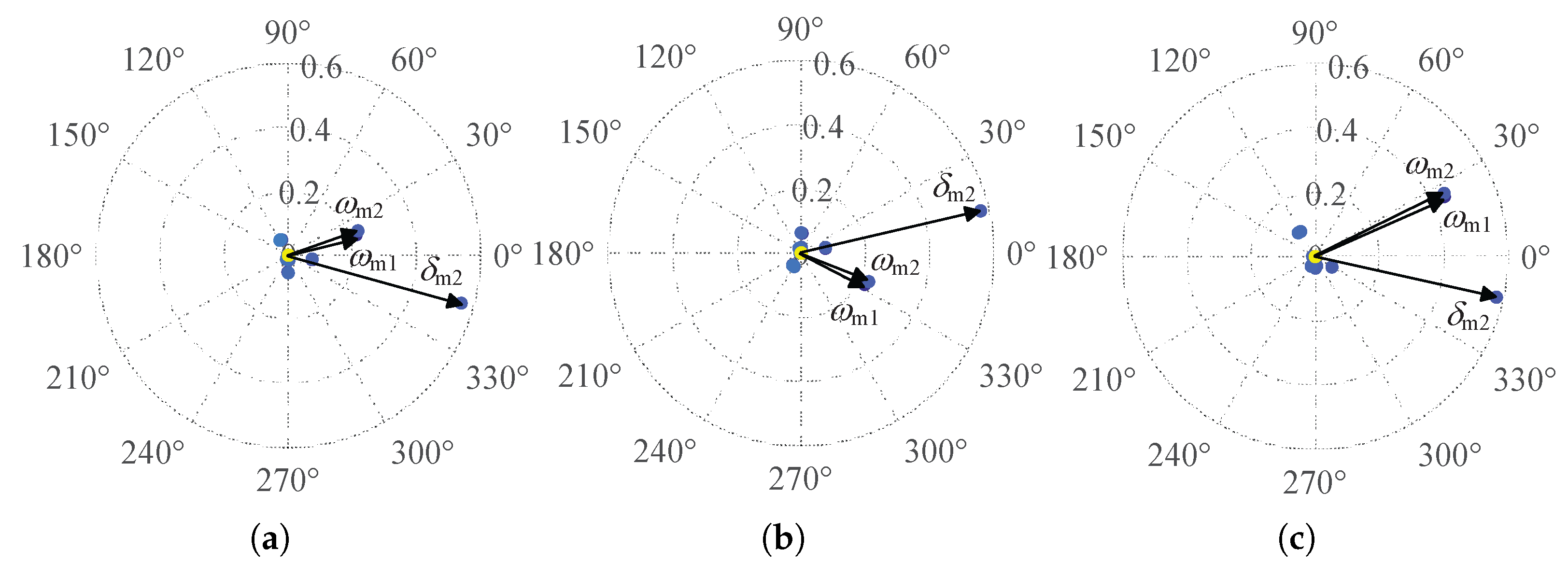
Table 2. The whole participation factors of the three pairs of eigenvalues are calculated and represented by colored dots as shown in
Figure 7, respectively. In the participation factor graph, those greater than 0.1 are considered key state variables, which have a significant degree of participation in the eigenvalues and are indicated by arrows in
Figure 7. In the T1-type grid, the highest participation factor is observed in
, followed by
. For the T2-type grid, the participation factors of both
and
are reduced compared to the T1-type grid. According to the definition of the state-space model,
represents the interaction between the GFL and the GFM1 inverter.
represents the influence of the
q-axis component of the current of the grid on the GFL inverters, which partially quantifies the impact of the grid on the dynamics of the GFL inverters. As indicated by the participation factor results, it can be seen that the influence of the grid on the GFL inverters is reduced in the T2-type grid, and the interaction between the GFL and the GFM1 inverter is also weakened. For the T3-type grid, the participation factors of both
and
increase compared to the T1- and T2-type grids. This is attributed to the closer proximity of the GFL inverters to the infinite grid in the T3-type grid topology structure.
Meanwhile, a small signal analysis is conducted on three eigenvalue pairs corresponding to
and
, and the results are presented in
Table 2. A comparison of the oscillation frequencies
f reveals that the T3-type grid exhibits a higher frequency than the T2- and T1-type grid. Furthermore, the damping ratios
for the T1, T2 and T3-type grids are measured as
and
respectively, signifying the presence of time-divergent oscillations in both systems. However, the T2-type grid demonstrates a relatively larger damping ratio, resulting in a slower rate of oscillatory divergence. The damping ratio of the T3-type grid is greater than zero, which indicates that no oscillations in T3-type grid.
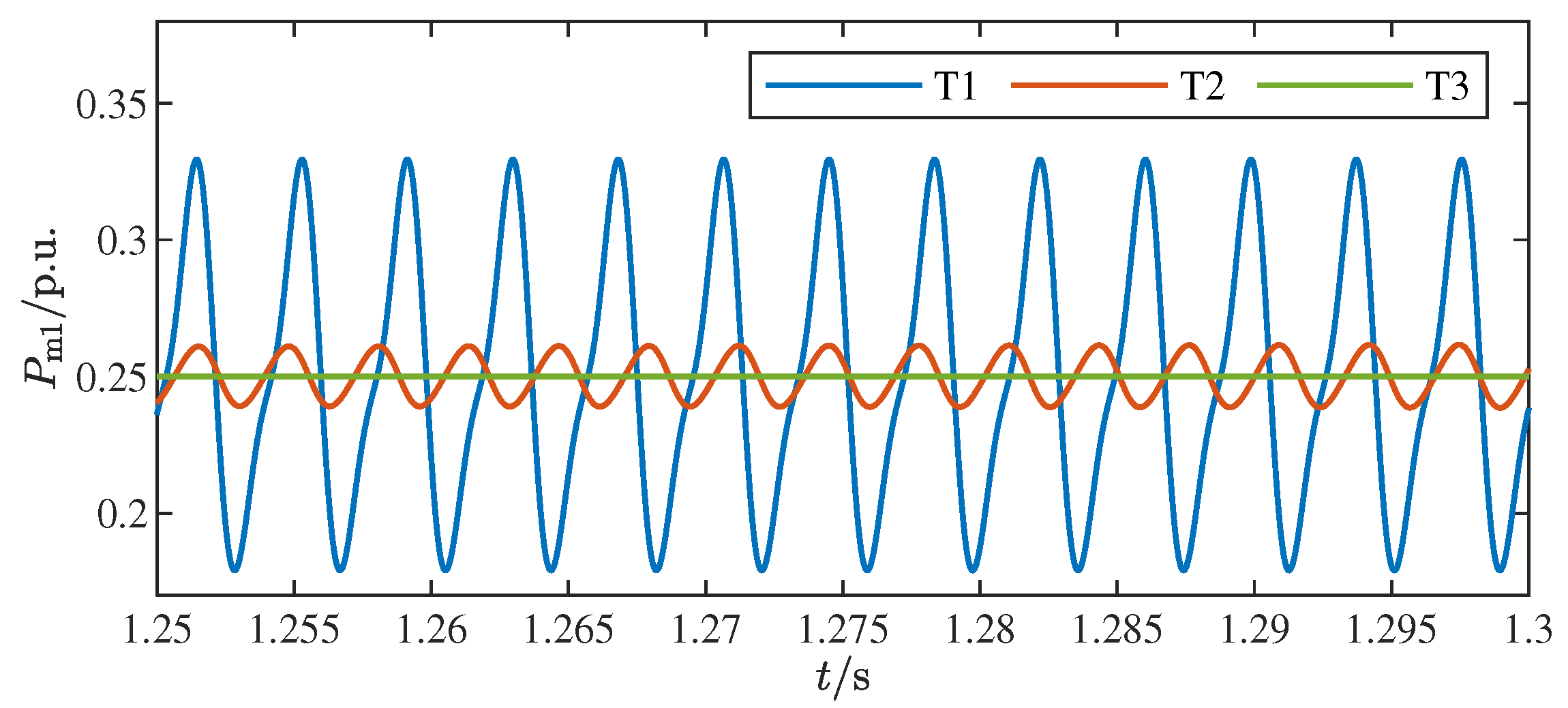
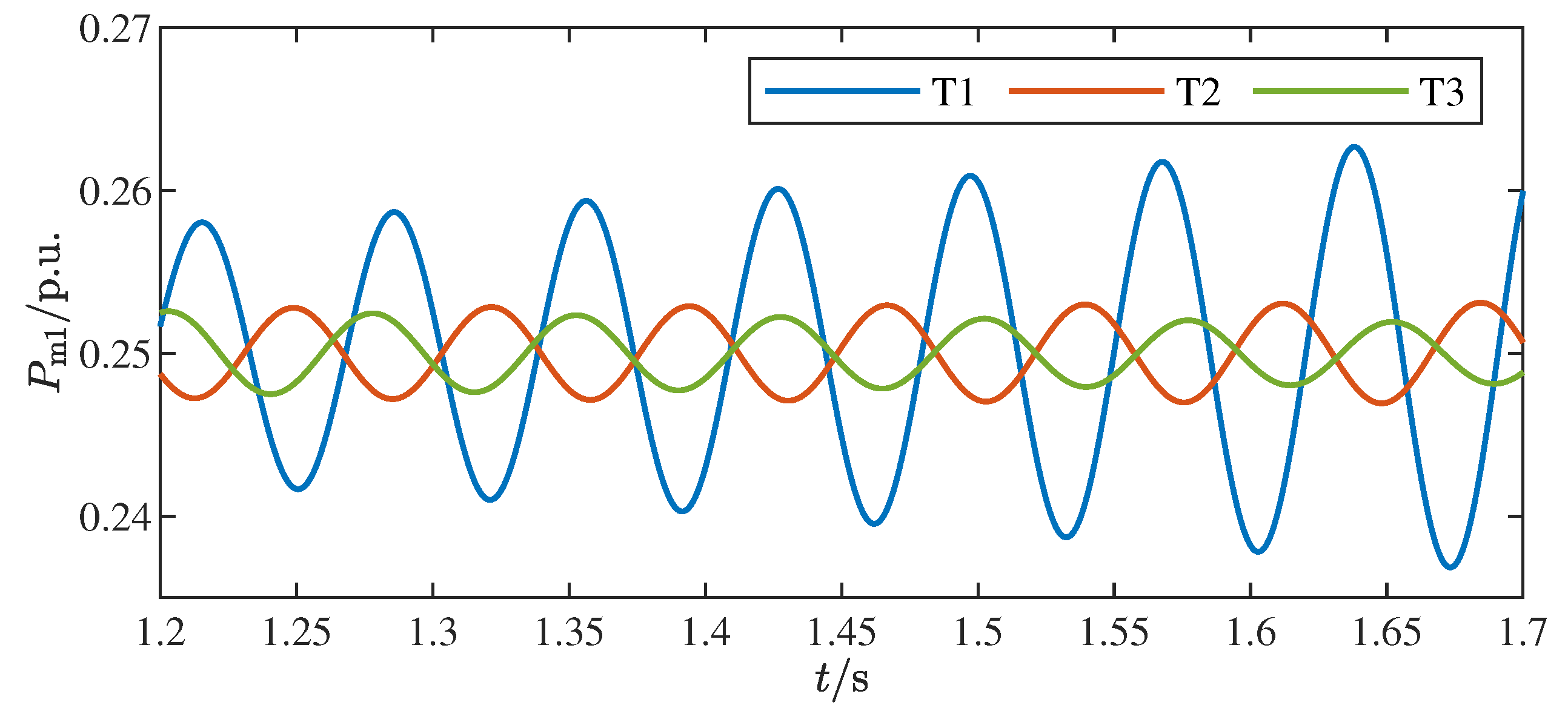
To further validate the stability of grid topology structures,
Figure 8 presents the simulation results in the time domain of the normalized active power
of the GFM1 inverter when
and
. In order to more intuitively show the differences among the three sets of curves, the waveform graph from 1.25 to 1.3 s is selected for analysis. It can be distinctly observed that as grid topology structure is transitioned from Type T1 to Type T3, the stability of the GFL inverter is progressively enhanced, with oscillatory behavior becoming increasingly suppressed. In particular, in the T3-type grid configuration, no oscillations are observed throughout the system. This confirms that the grid has a high degree of participation in the oscillation mode of the GFL inverter, which aligns with the theoretical analysis presented earlier.
Through fast Fourier transform (FFT) analysis of the simulation waveforms, it can be obtained that the oscillation frequencies of the blue and orange curves are 261 and 301 Hz, respectively, demonstrating a sequential frequency escalation. The results in the time domain are consistent with the analysis results of
f in
Table 2. In
Figure 8, the blue and orange curves have oscillations that diverge over time, whereas the green curve does not. This behavior indicates that the damping ratios
of the T1 and T2-type grids are negative, while the T3-type grid achieves a positive damping ratio. The results in the time domain are consistent with the analysis results of
in
Table 2.
In conclusion, the grid has a high degree of participation in the dominant oscillation mode of the GFL inverters. Under identical parameter sets, the damping ratios of T1-, T2-, and T3-type grids increase successively. With identical parameter variations, the T3-type grid is less prone to instability than the T2-type grid, and the T2-type grid exhibits higher stability than the T1-type grid. As grid topology structure is transitioned from T1- to T3-type, the stability of the GFL inverters and the robustness of the system gradually improve. Consequently, GFL inverters are optimally recommended for integration into robust grids such as the T2- and T3-type grid.
4.3. Simulation Validation of Grid Topology Impact on GFM Inverters Dominant Oscillation Modes
Similar to the previous subsection, based on the initial parameters in
Table 1, gradually decrease
, and observe that when
, the full-order eigenvalues are shown as in
Figure 9a–c. The eigenvalues dominated by GFM inverters in the three type topology structures are
,
, and
, respectively. Then, with reduction
, the dominant increase in the eigenvalues can be calculated using Equation (
24). The
,
, and
, respectively. This demonstrates that decreasing
shifts the eigenvalues of the system along the real axis toward the RHP, indicating reduced stability margins. Continuing to decrease
, the full-order eigenvalues are shown in
Figure 9. Under these parameters,
,
, and
, respectively.
Similar to the previous analysis, the main eigenvalues of the GFM inverters extracted from
Figure 9 are shown in
Figure 10. The distance between points ‘o’ and ‘x’ in the
Figure 10 represents the stability region of eigenvalues when GFM inverters undergo identical parameter variations under three grid topology structures. It can be observed that with the decreasing damping coefficient
, the eigenvalues of both grid topology structures are shifted RHP along the real axis, consistent with the eigenvalue variation analysis
presented earlier. Observing
Figure 10, it can be seen that the variation pattern of the eigenvalues is similar to that of the GFL inverters. Notably, by observing the eigenvalue trajectories of three grid topology structures under the same parameter variations, it can be seen that the feasible parameter domain of T1-type grid is bigger than that of T2-type grid, and T3-type grid is minimum. This result is contrary to that of GFL inverters. This demonstrates that GFM inverters possess a smaller parameter feasible region under strong grid conditions.
Under the operating conditions of
, the small signal analysis of the eigenvalues is presented in
Table 3. The whole participation factors of the three pairs of eigenvalues are calculated and represented by colored dots as shown in
Figure 11, respectively. Across three grid topology structures, significant participation factors are observed in
,
, and
. The participation levels of other state variables remain below 0.1, indicating a negligible influence on the eigenvalues. The state variable
related to the power grid is consistently found to be minimal, indicating that the power grid has a minor influence on the GFM inverters.
characterizes the interaction among the GFM inverters. From T1- to T3-type, the degree of participation has increased slightly. This indicates that the interaction between the GFM inverters is strengthened under stronger grid conditions.
and
represent the frequency characteristics of the synchronous loops of the GFM1 and GFM2 inverters, respectively, which exhibit nearly identical participation levels on the T1 and T2-type grids. However, a substantial increase in their participation factors is observed in the T3-type grid, demonstrating that the stability of GFM inverters under a strong grid condition is more susceptible to the influence of their synchronization loop control capabilities.
Meanwhile, a small signal analysis is conducted on three eigenvalue pairs corresponding to
, and the results are presented in
Table 3. A comparison of the oscillation frequencies
f reveals a progressive decline from T1 to T3-type. Furthermore, the damping ratios
for T1 and T2-type grids are measured as
and
respectively, signifying time-divergent oscillations in both configurations. In particular, the T2-type grid exhibits a relatively higher damping ratio, resulting in slower oscillatory divergence. In contrast, the T3-type grid achieves a positive damping ratio
, indicative of time-convergent oscillations.
Figure 12 presents the simulation results in the time domain of the normalized active power
of the GFM1 inverter when
. It is evident that as grid topology structure is transitioned from T1 to T3, the GFM inverters become increasingly stabilized, with oscillations gradually attenuated. However, the synchronization control of the GFM inverter still causes oscillations despite the grid intensity being stronger. It indicates that increasing the intensity of the grid can only partially improve the stability of GFM inverters, while the synchronization control capability of the inverters plays a more dominant role. It is different from the research results of the GFL inverters.
Through FFT analysis of the simulation waveforms, it can be obtained that the oscillation frequencies of the blue and orange curves are 15 Hz and 14 Hz, respectively, and the green curve is 13.6 Hz. The oscillation frequencies decrease subsequently. The results in the time domain are consistent with the analysis results of
f in
Table 3. The blue and orange curves exhibit time-divergent oscillations, whereas the green curve shows time-convergent oscillation. This confirms that the damping ratios are negative for T1 and T2-type grids, but positive for T3-type. The results in the time domain are consistent with the analysis results of
in
Table 3.
In conclusion, under identical parameter sets, the damping ratios of the T1-, T2-, and T3-type grids increase successively. As grid topology structure is transitioned from T1- to T3-type, the stability of GFM inverters gradually improves, although the enhancement remains limited. With identical parameter variations, the robustness of the system gradually reduces. The stability of the GFM inverter is more critically governed by its intrinsic synchronization control capability. Consequently, optimizing the synchronization loop dynamics will lead to greater stability improvements in GFM inverters.
4.4. Stability Analysis and Simulation Verification of Different Grid Topology Structures Under Simultaneous Parameter Variations in GFM and GFL Inverters
In this subsection, we discuss the stability characteristic of the system under diverse grid topologies when the parameters of both GFL and GFM inverters change simultaneously. Initially, through a comparison between Equations (
22) and (
24), it becomes evident that the variation of the system’s eigenvalues depends on the participation factors associated with
,
, and
. A comparison of these two equations reveals that the participation factors related to
and
are entirely independent of those related to
. This indicates that when
,
, and
undergo simultaneous changes, within the system’s full-order eigenvalues, there will be two pairs of completely independent eigenvalues that change correspondingly. Herein, we adopt the same parameter variations as previously described:
and
are adjusted from 0.14 and 3.08 to 13.5 and 3000, while
is modified from 15 to 7. The eigenvalues that change in the system under three grid topology structures when
,
and
are presented in
Table 4.
It can be seen from the
Table 4 that the systems under three grid topologies all possess two pairs of eigenvalues with positive real parts. Initially, a comparison is made between the eigenvalues
,
, and
presented in
Table 4 and those in
Table 2. It is obvious that these eigenvalues are dominated by the GFL inverter. When the parameters of both the GFL and GFM inverters undergo simultaneous changes, the dominant eigenvalues of the GFL exhibit negligible differences in oscillation frequency
f, damping coefficient
, and participation factors when compared to those obtained in
Table 2. Meanwhile, through a comparison of the eigenvalues of
,
, and
presented in
Table 4 with those governed by the GFM inverter in
Table 3, the identical conclusion can be reached. Thus, the example data effectively corroborates the analysis results of Equations (
22) and (
24) in the foregoing text. Specifically, the oscillations governed by the GFL and GFM inverters are entirely independent.
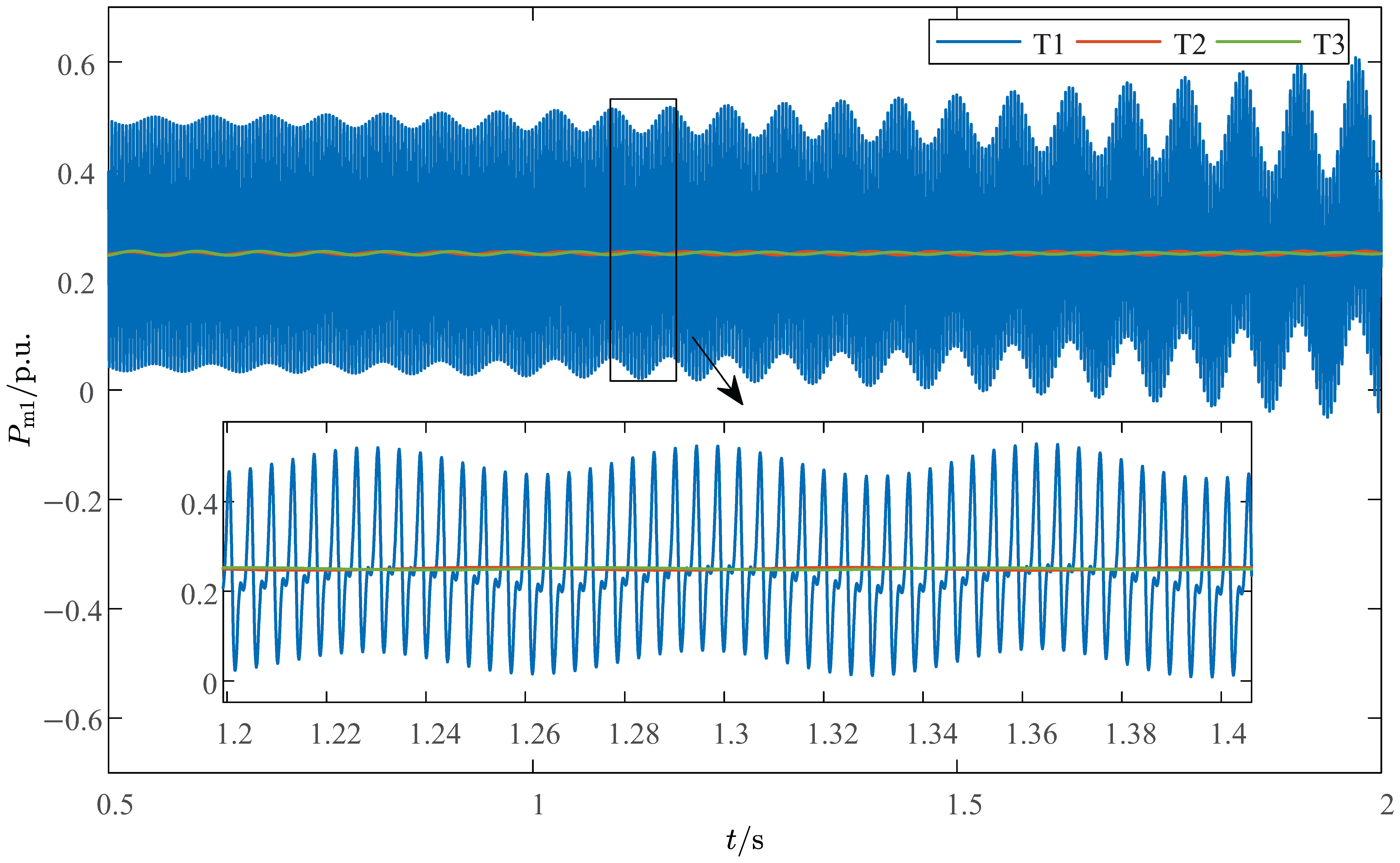
To better validate the above results,
Figure 13 shows the time-domain simulation results of the active power
under the conditions
,
and
. FFT analysis of the three waveforms in
Figure 13 reveals that the T1-type grid waveform contains oscillation frequencies of 261 Hz and 15 Hz, indicating a superposition of these two frequencies. The T2-type grid waveform exhibits oscillation frequencies of 303 Hz and 14 Hz. However, since the real parts of
in the T2-type grid system are very small, the 303 Hz oscillation component is negligible, and the waveform is predominantly governed by the 14 Hz oscillation. In the T3-type grid, the real parts of
are negative, meaning the potential oscillation modes are not excited. Consequently, the T3-type grid waveform only contains a decaying 13 Hz oscillation frequency over time.
In summary, the oscillations dominated by GFL and GFM inverters are entirely independent. The separate analysis of dominant oscillation modes in GFL and GFM inverters is justified in the previous analysis.
4.6. Simulation Validation of Grid Impedance Impact on Inverter Dominant Oscillatory Modes
Using the initial parameters of
Table 1 and taking
,
and
, the dominant eigenvalues of the GFL inverters are
. Under these parameters, doubling the connection impedance
of the GFL inverters, the increase of the dominant eigenvalue
of the T1-type grid can be calculated by Equation (
26). This indicates that as
increases, the system eigenvalues move along the real axis to the RHP. The larger the connection impedance of the GFL inverters, the more likely the system is to lose stability. In contrast, using the initial parameters from
Table 1 and taking
,
and
, the dominant eigenvalues of the GFM inverters are
. Under these parameters, doubling the coupling impedance
of the GFM inverters produces a dominant increase in the eigenvalue
for the T1-type grid via Equation (
25). This demonstrates that increasing
drives the eigenvalues to the left along the real axis, thus enhancing stability. The larger the connection impedance of the GFM inverters, the more stable the system is.
To verify the influence of the connection impedance on the stability of each inverter through simulation, T1-type grid topology structure is selected for research, as shown in
Figure 4a. Four operating cases are defined as shown in
Table 5.
In four operating cases, the electrical distance between the GFL inverters and the PCC changes under conditions
and
. Compared to conditions
and
, the electrical distance between the GFL inverters and the PCC remained the same under conditions
and
, while the electrical distance between the GFM inverters and the PCC changed. The small signal analysis of the four operating cases’ eigenvalues are presented in
Table 6.
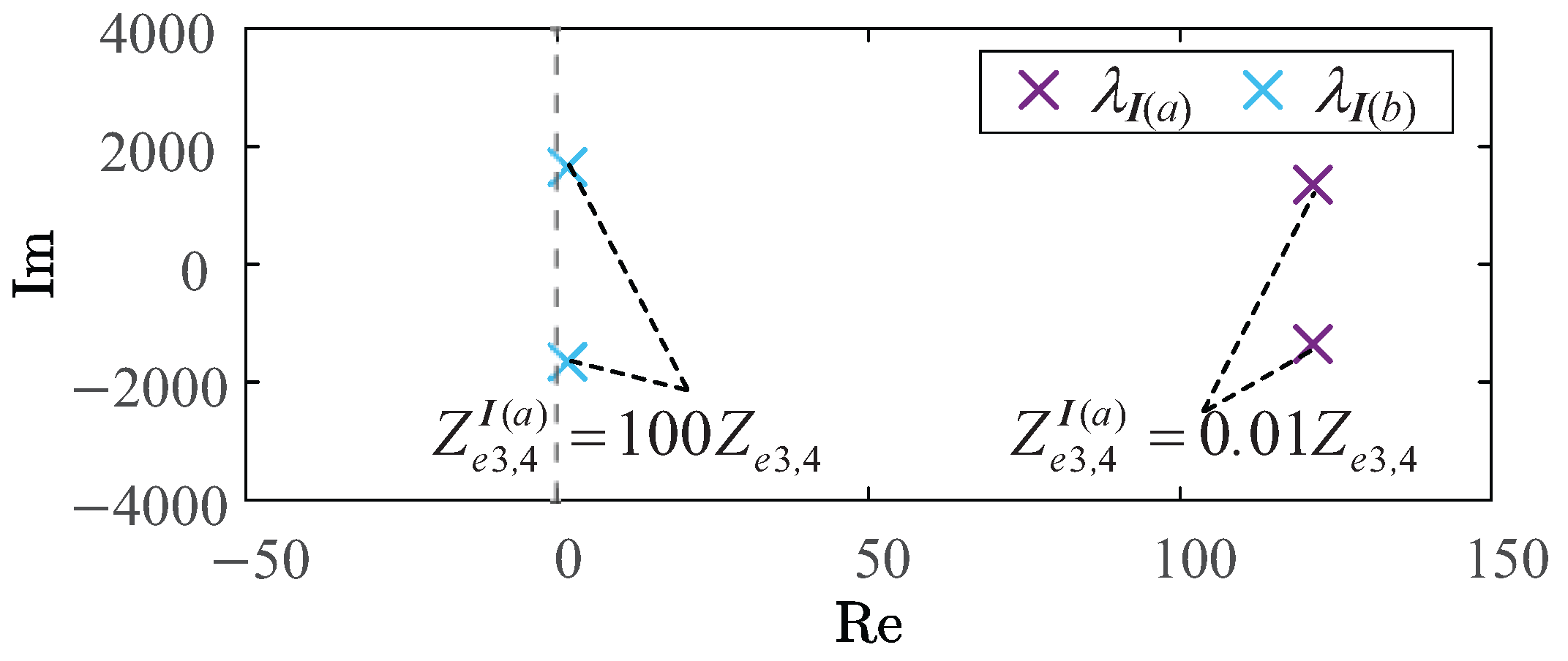
The dominant eigenvalues of the GFL inverters under operating conditions
and
are plotted in
Figure 14. The eigenvalues of
are observed to be farther to the right compared to
, indicating that the larger the connection impedance of the GFL inverters, the more unstable the system is, which is consistent with the analysis results of
mentioned above.
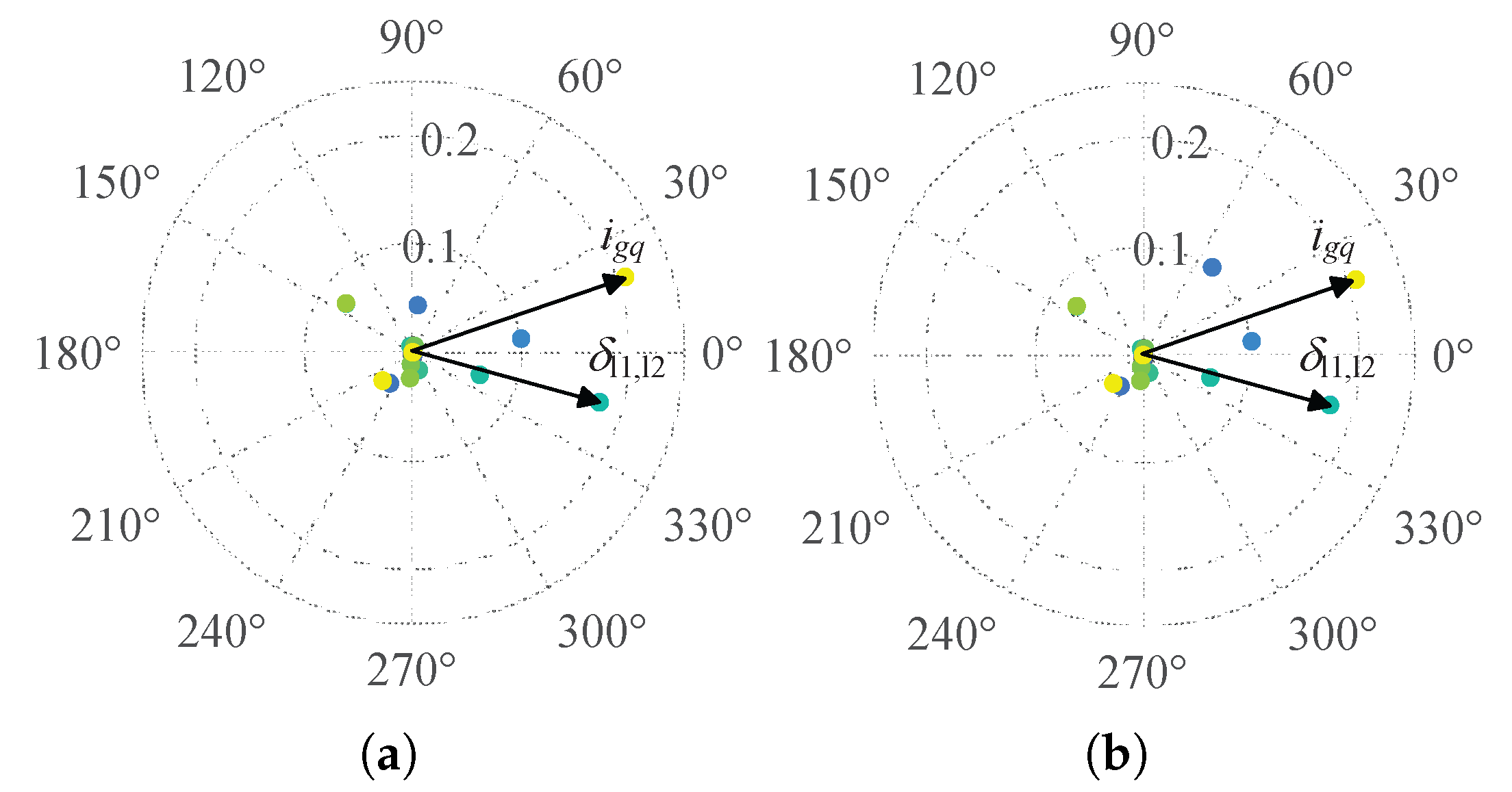
The whole participation factors of the two pairs of eigenvalues are calculated and represented by colored dots as shown in
Figure 15. The participation degree of
is highest in both cases, with
. This implies that a shorter electrical distance between the GFL inverters and the PCC amplifies the grid-induced impacts on the GFL dynamics. The participation degree of
under
exceeds that of
, suggesting that the longer electrical distance reduces interactions between GFL units.
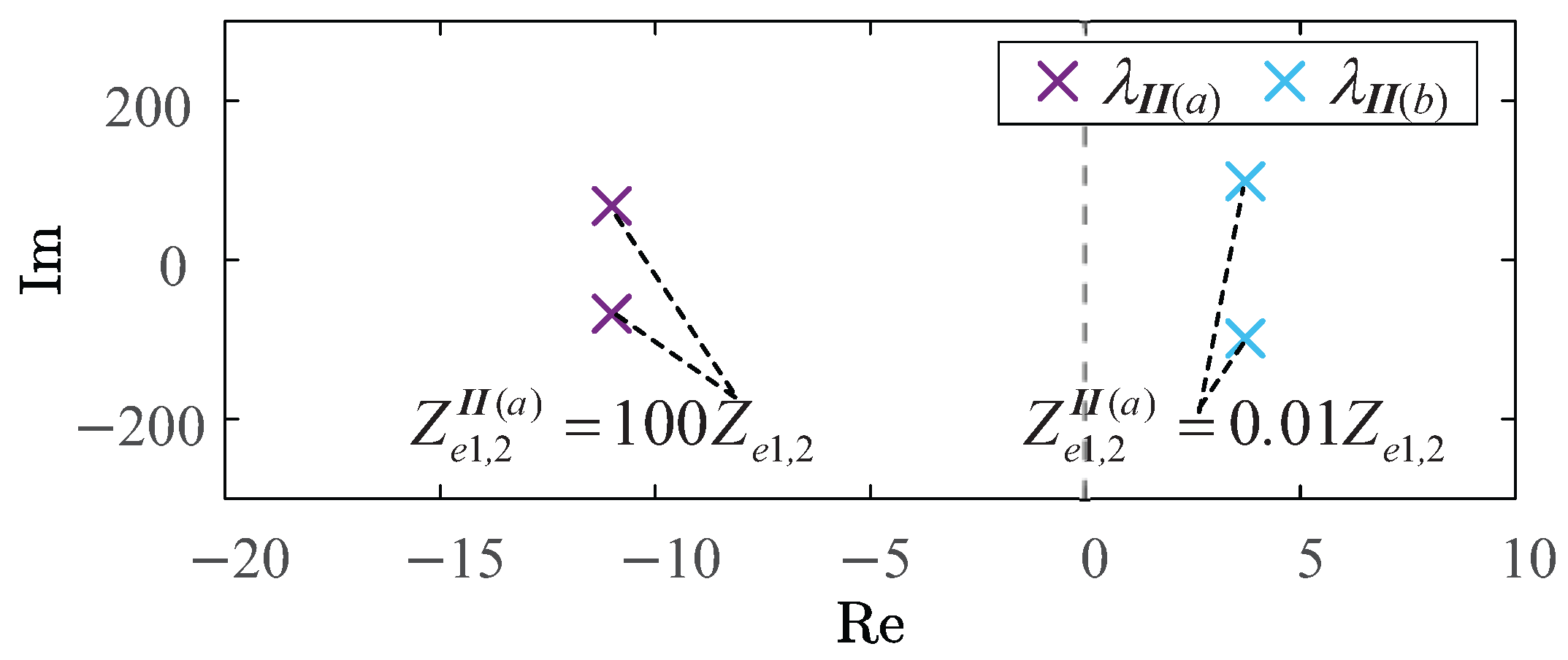
The dominant eigenvalues of the GFM inverters under operating conditions
and
are plotted in
Figure 16. The eigenvalues of
are observed to be farther to the left than
, indicating that the larger the connection impedance of the GFM inverter, the more stable the system, which is consistent with the analysis results of
mentioned above.
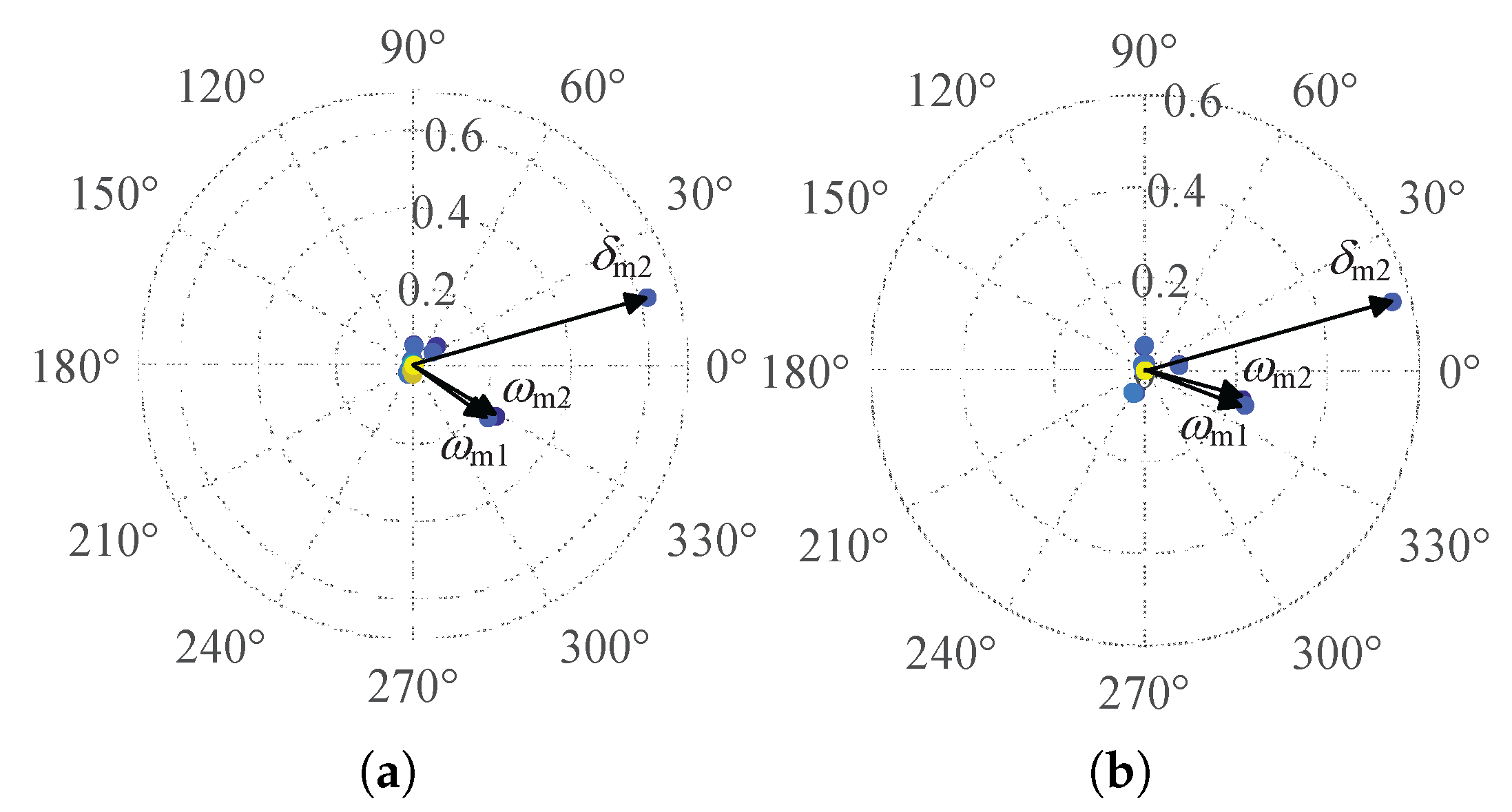
The whole participation factors of the two pairs of eigenvalues are calculated and represented by colored dots as shown in
Figure 17. In
, the participation degrees of
and
are higher than those of
. This indicates that increasing the electrical distance between GFM inverters and PCC amplifies inter-inverter interactions and elevates the influence of their intrinsic frequency stability on system dynamics.
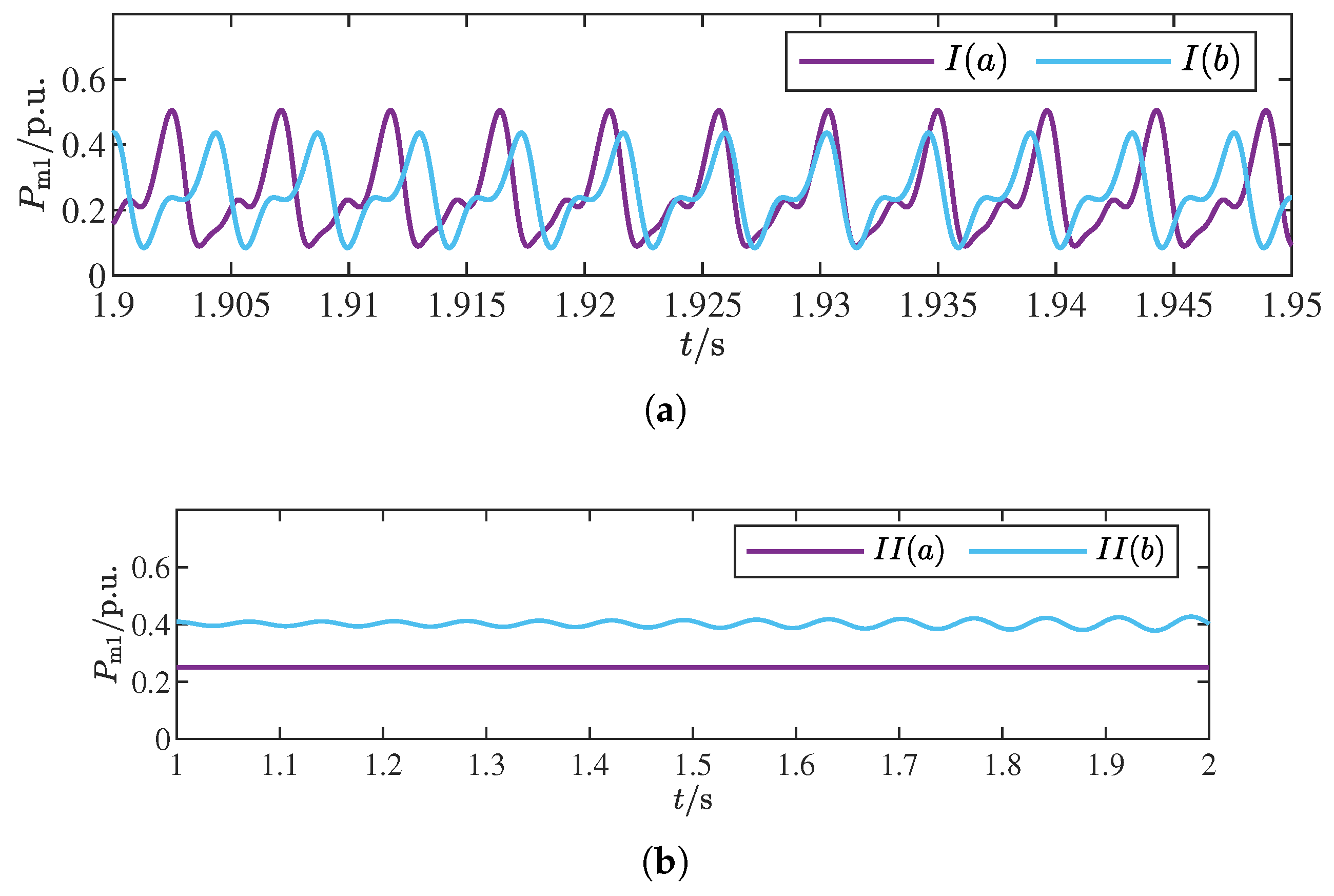
Figure 18 presents the time domain simulation results of the normalized active power
of the GFM1 inverter under four connection impedance operating cases. In
Figure 18a, it can be seen that both curves exhibit oscillations that diverge over time, but the blue curve diverges more slowly. This indicates that the system damping ratios under both operating scenarios are less than 0. In
Figure 18b, it can be seen that the purple curve does not have oscillation, while the blue curve exhibits oscillation that diverges over time. This indicates that the damping ratio of the system is greater than 0 under condition
and less than 0 under condition
. The time domain results are consistent with the analysis results of
in
Table 6.
The same analysis and verification are performed under grid topology structures of T2- and T3-type. The results show that as the connection impedance increases, the GFL inverters are more prone to oscillation, and the system stability declines. In contrast, the GFM inverters are less likely to oscillate, and the system stability increases.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}