


Distributed Real-Time Feedback Optimization for Renewable Energy Sources and Vehicle-to-Grid Power Compensation of Electric Vehicle Chargers in Distribution Systems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- It unleashes the real-time grid support capability of EV chargers. The current literature usually optimizes the charging schedule of EV charges over a long time window. The flexibility in battery charging to offer real-time bus voltage magnitude regulation service is neglected. On the other hand, the proposed controller optimizes the control signals to EV chargers in real time to regulate the CB voltage magnitudes, which are vulnerable to time-varying fluctuating power outputs from RESs.
- It avoids the potential control conflicts between RESs and other controllable devices by formulating their control targets in a single optimization problem. RESs are generally controlled as grid-following inverters to follow their power injection setpoints with cascaded PI controllers. This control strategy does not consider other control targets in the distribution system and lacks coordination with other controllable devices. On the other hand, in the proposed optimization-based controller, their power setpoint tracking requirements are formulated alongside other control targets, i.e., CB voltage magnitude regulation, in a single optimization problem. EV chargers and RESs are controlled synergistically to achieve their control targets.
2. Literature Review
3. Model Description
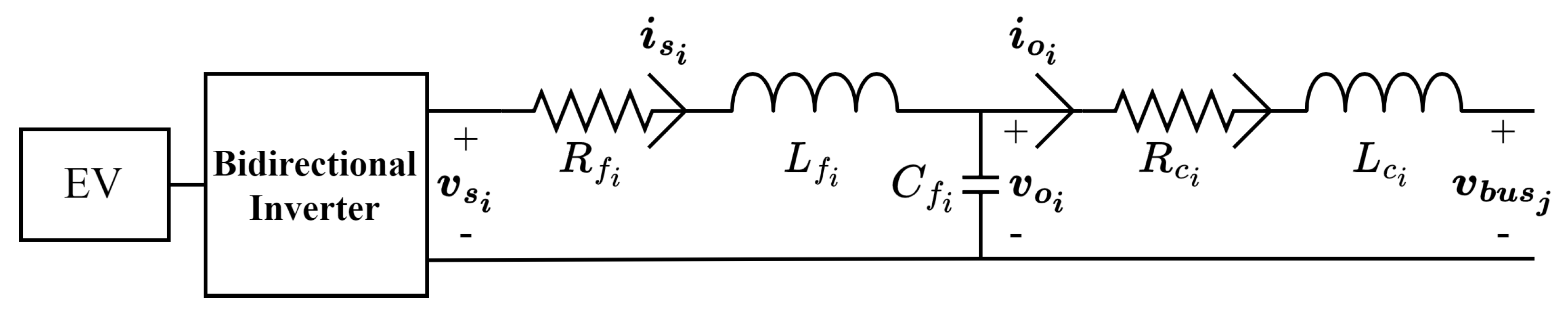
3.1. Electric Vehicle Charger Model
3.2. Renewable Energy Source Model
3.3. Distribution Line Model
3.4. Load Model
3.5. Bus Model
3.6. Interconnected System Model
4. Optimization Problem Formulation
- Interface with Preset Optimal EV Active Power Charging Schedule: The proposed controller can interface with the preset EV active power consumption schedules by setting the and in (13) to the scheduled active power consumption, i.e., driving the active power consumption of the EVs to follow the preset active charging profiles computed by other optimization algorithms. In this case, the proposed controller still optimizes the EV chargers’ reactive power consumption to offer real-time grid ancillary service to the distribution systems.
- Battery Degradation Consideration: V2G technology inevitably accelerates the degradation of EV batteries. Their charging and discharging rates need to be carefully controlled to relieve their aging problem. The proposed controller can slow down the aging problem by setting the and as functions of their state of charge. For example, when the state of charge of EV i is low, then can be set to zero, i.e., it stops drawing energy from them to avoid damaging the battery.
5. Proposed Feedback Optimization-Based Controller
6. Case Studies
- The proposed controller was applied to the dynamic system model in Section 3. The communication time interval between each device was set to 0.1 s, i.e., the control input to EVs and RESs were updated every 0.1 s. The RLC dynamics of the distribution system were simulated.
- Optimization problem (13) was solved every second, with in (13d) being set to the corresponding MPPT profiles. This case study is a benchmark to test whether the proposed controller can drive the distribution system to the optimal steady state condition defined in (13) at each second. Note that this case study does not consider the dynamics of the system. The results are the steady state optimal condition of the distribution system with the corresponding RESs’ power injection setpoints in each second.
- Algebraic Equations (13b) to (13e) were solved every second, with in (13d) being set to the corresponding MPPT profiles and the active and reactive power injections of the EVs being set to their average values in case study 2. This case study demonstrates the existing approach in optimizing the EV charging schedule, i.e., the power injection commands to the EV chargers are fixed within each time window, which was assumed to be 1 h in this case study. Note that this case study does not consider the dynamics of the system. The results are the steady state condition of the distribution system with the corresponding EV chargers’ power injections and the RESs’ power injection setpoints in each second.
- Algebraic Equations (13b) to (13e) were solved every second, with in (13d) being set to the corresponding MPPT profiles and the active and reactive power injections of the EV chargers being set to 20,000 W and 0 Var, respectively. In this case study, the EV chargers were charged at the full rate of 20,000 W. This case study demonstrates the scenario where the charging process of EVs is uncoordinated. Again, this case study does not consider the dynamics of the system. The results are the steady state condition of the distribution system with the corresponding EV chargers’ power injections and the RESs’ power injection setpoints in each second.
6.1. Simulation Results
6.1.1. Renewable Energy Sources
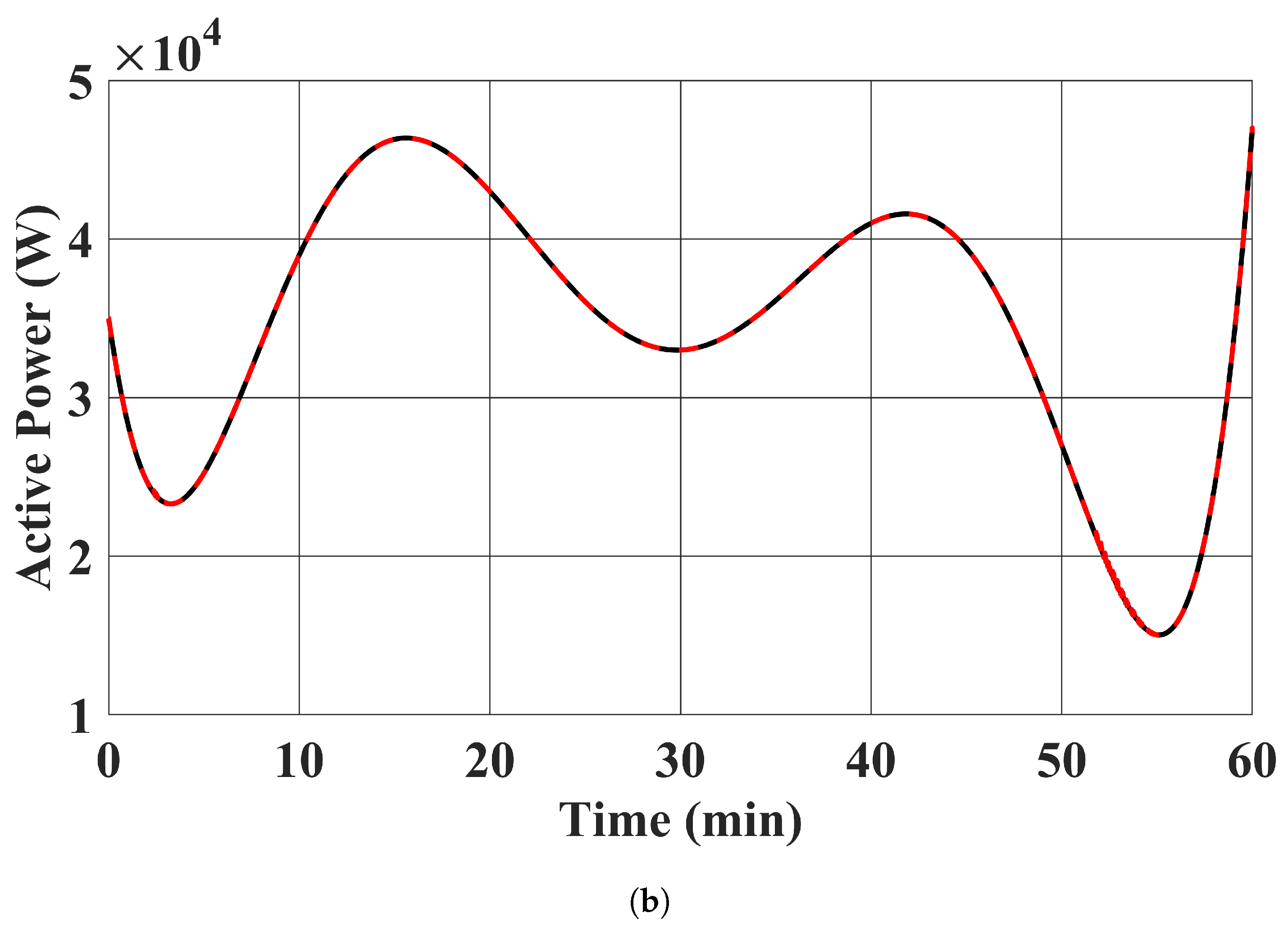
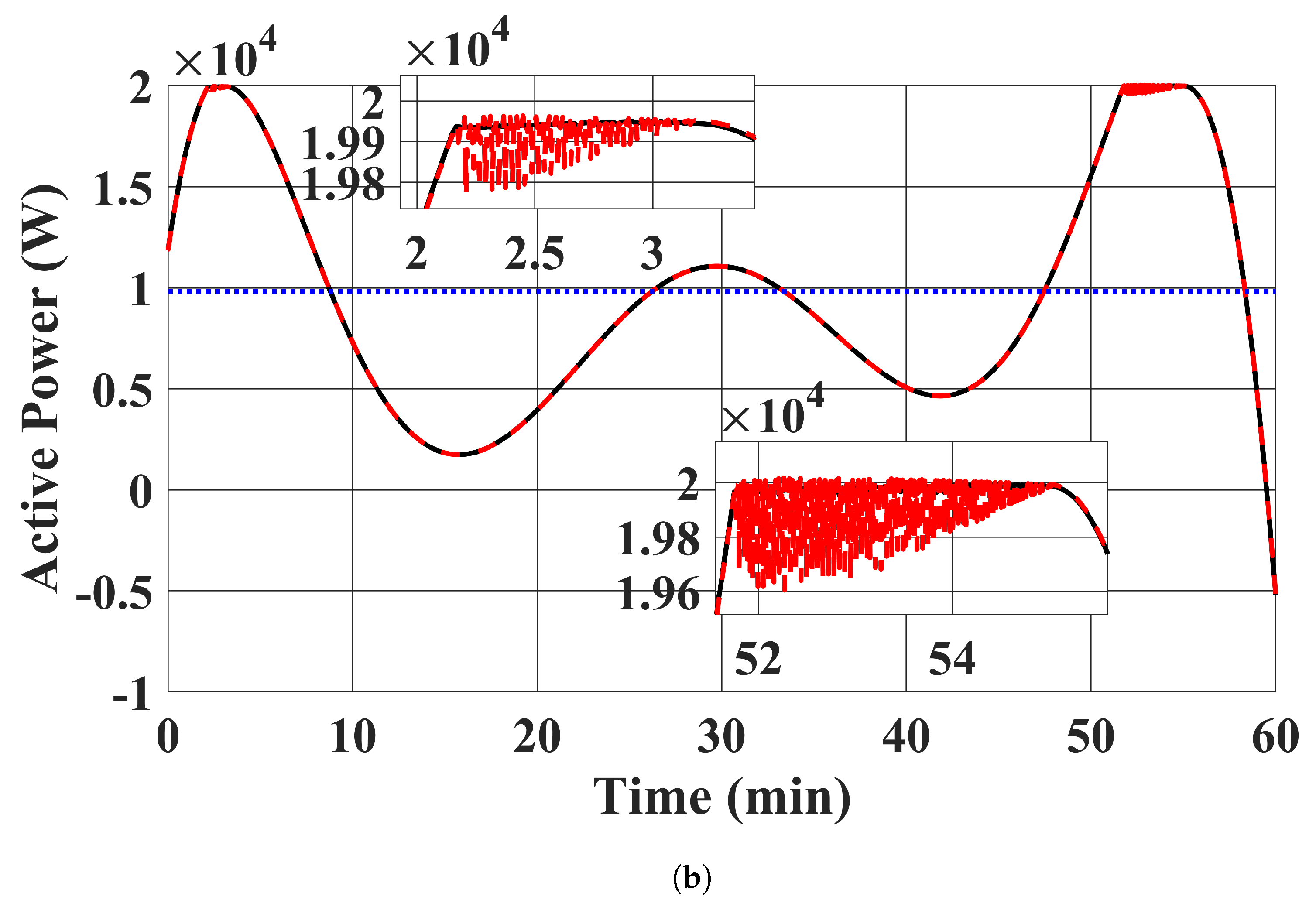
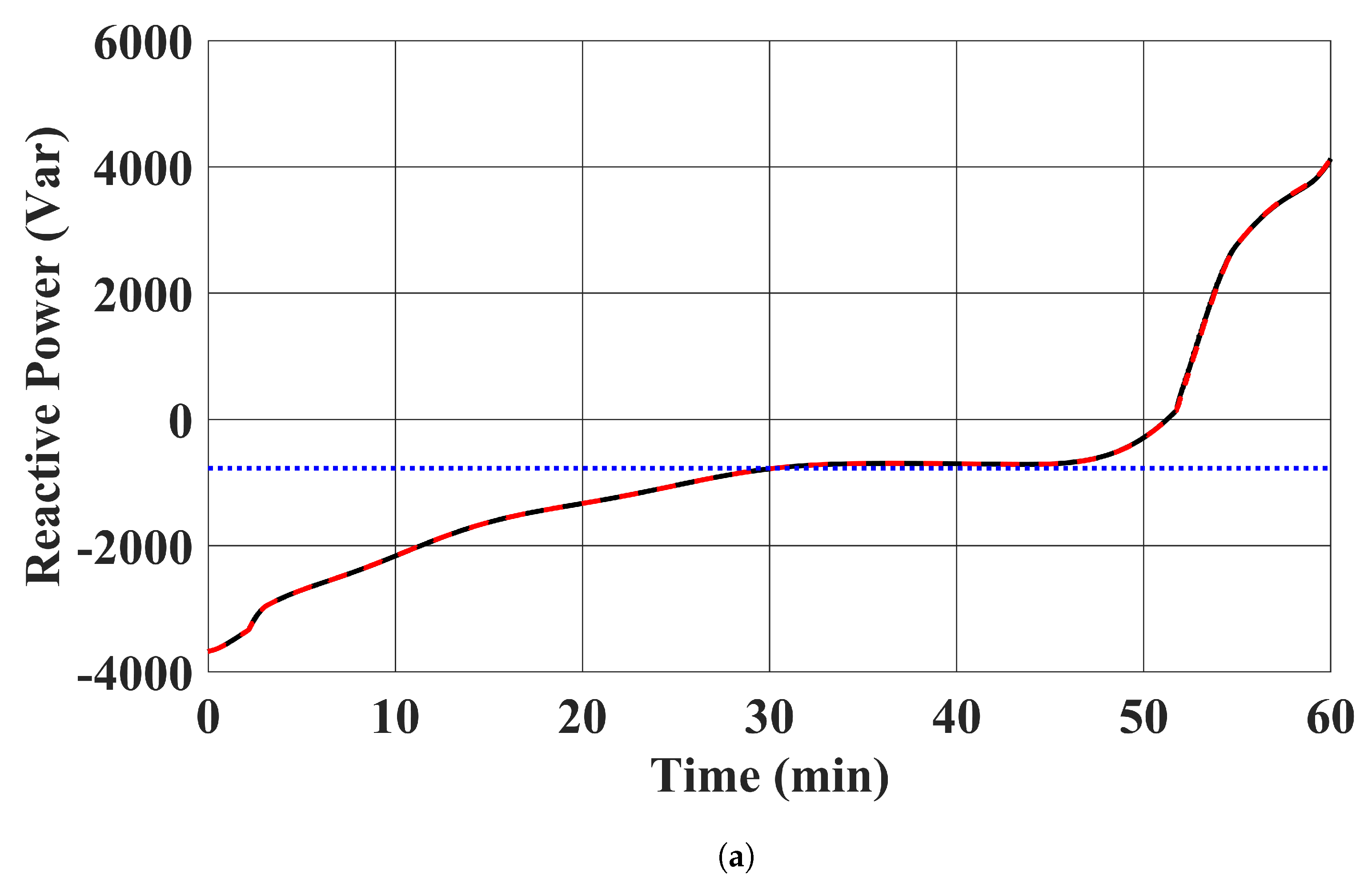
6.1.2. Electric Vehicle Chargers
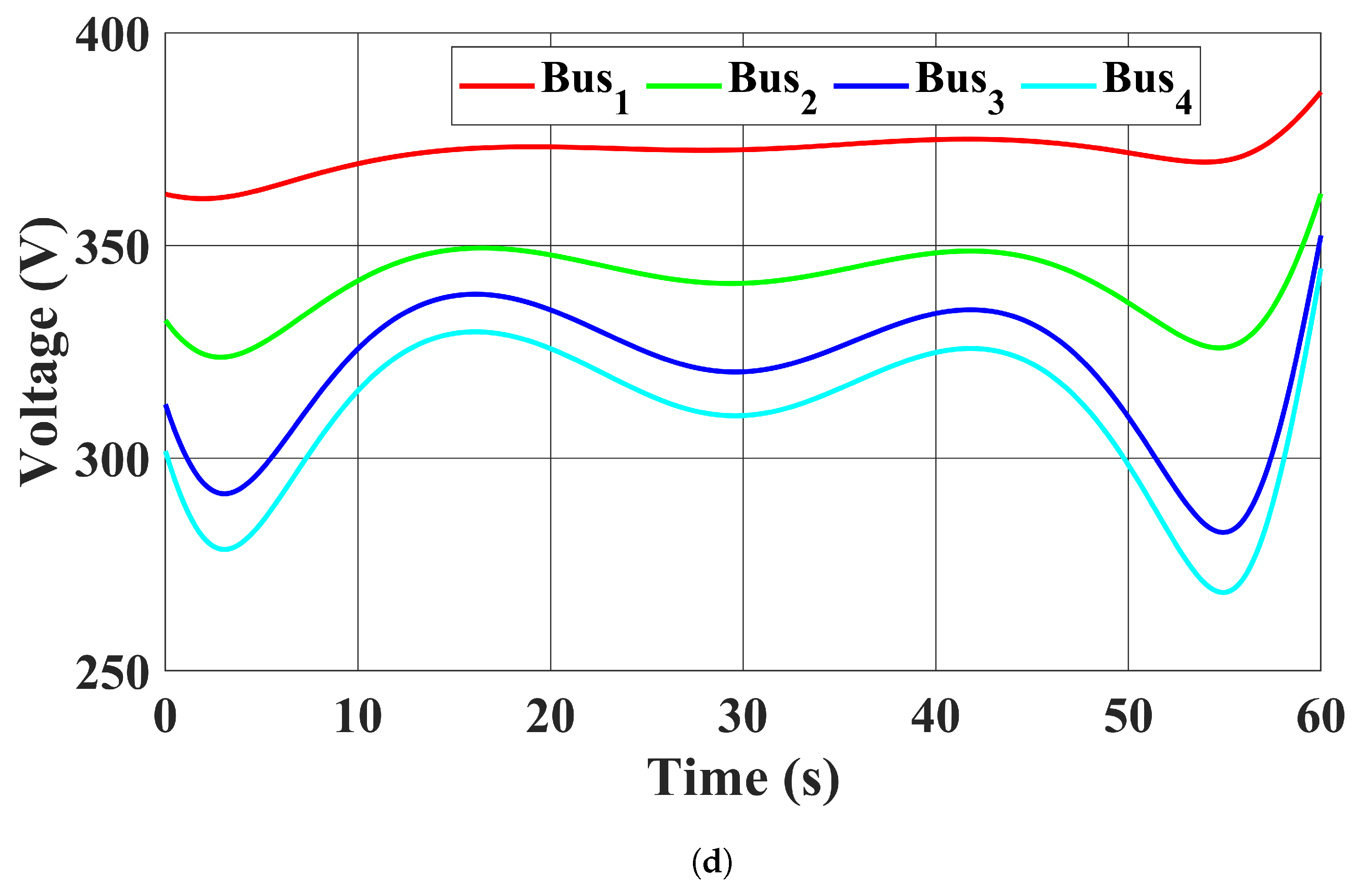
6.1.3. Bus Voltage Magnitudes
6.2. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Correction Statement
References
- Lesser, J.A.; Su, X. Design of an economically efficient feed-in tariff structure for renewable energy development. Energy Policy 2008, 36, 981–990. [Google Scholar] [CrossRef]
- Pyrgou, A.; Kylili, A.; Fokaides, P.A. The future of the Feed-in Tariff (FiT) scheme in Europe: The case of photovoltaics. Energy Policy 2016, 95, 94–102. [Google Scholar] [CrossRef]
- Alizamir, S.; de Véricourt, F.; Sun, P. Efficient feed-in-tariff policies for renewable energy technologies. Oper. Res. 2016, 64, 52–66. [Google Scholar] [CrossRef]
- Liu, W.; Placke, T.; Chau, K. Overview of batteries and battery management for electric vehicles. Energy Rep. 2022, 8, 4058–4084. [Google Scholar] [CrossRef]
- Yong, J.Y.; Ramachandaramurthy, V.K.; Tan, K.M.; Mithulananthan, N. A review on the state-of-the-art technologies of electric vehicle, its impacts and prospects. Renew. Sustain. Energy Rev. 2015, 49, 365–385. [Google Scholar] [CrossRef]
- Ding, N.; Prasad, K.; Lie, T.T. The electric vehicle: A review. Int. J. Electr. Hybrid Veh. 2017, 9, 49–66. [Google Scholar] [CrossRef]
- Kumar, M.S.; Revankar, S.T. Development scheme and key technology of an electric vehicle: An overview. Renew. Sustain. Energy Rev. 2017, 70, 1266–1285. [Google Scholar] [CrossRef]
- Zheng, Y.; Hill, D.J.; Meng, K.; Hui, S. Critical bus voltage support in distribution systems with electric springs and responsibility sharing. IEEE Trans. Power Syst. 2016, 32, 3584–3593. [Google Scholar] [CrossRef]
- Chen, T.; Zhang, X.P.; Wang, J.; Li, J.; Wu, C.; Hu, M.; Bian, H. A Review on Electric Vehicle Charging Infrastructure Development in the UK. J. Mod. Power Syst. Clean Energy 2020, 8, 193–205. [Google Scholar] [CrossRef]
- Srdic, S.; Lukic, S. Toward extreme fast charging: Challenges and opportunities in directly connecting to medium-voltage line. IEEE Electrif. Mag. 2019, 7, 22–31. [Google Scholar] [CrossRef]
- Ashfaq, M.; Butt, O.; Selvaraj, J.; Rahim, N. Assessment of electric vehicle charging infrastructure and its impact on the electric grid: A review. Int. J. Green Energy 2021, 18, 657–686. [Google Scholar] [CrossRef]
- Gan, L.; Topcu, U.; Low, S.H. Optimal decentralized protocol for electric vehicle charging. IEEE Trans. Power Syst. 2012, 28, 940–951. [Google Scholar] [CrossRef]
- Zhang, Y.; You, P.; Cai, L. Optimal charging scheduling by pricing for EV charging station with dual charging modes. IEEE Trans. Intell. Transp. Syst. 2018, 20, 3386–3396. [Google Scholar] [CrossRef]
- Ding, T.; Zeng, Z.; Bai, J.; Qin, B.; Yang, Y.; Shahidehpour, M. Optimal electric vehicle charging strategy with Markov decision process and reinforcement learning technique. IEEE Trans. Ind. Appl. 2020, 56, 5811–5823. [Google Scholar] [CrossRef]
- Liu, C.; Chau, K.; Wu, D.; Gao, S. Opportunities and challenges of vehicle-to-home, vehicle-to-vehicle, and vehicle-to-grid technologies. Proc. IEEE 2013, 101, 2409–2427. [Google Scholar] [CrossRef]
- Clement-Nyns, K.; Haesen, E.; Driesen, J. The impact of vehicle-to-grid on the distribution grid. Electr. Power Syst. Res. 2011, 81, 185–192. [Google Scholar] [CrossRef]
- Tan, K.M.; Ramachandaramurthy, V.K.; Yong, J.Y. Integration of electric vehicles in smart grid: A review on vehicle to grid technologies and optimization techniques. Renew. Sustain. Energy Rev. 2016, 53, 720–732. [Google Scholar] [CrossRef]
- Pirouzi, S.; Latify, M.A.; Yousefi, G.R. Conjugate active and reactive power management in a smart distribution network through electric vehicles: A mixed integer-linear programming model. Sustain. Energy Grids Netw. 2020, 22, 100344. [Google Scholar] [CrossRef]
- Xu, B.; Zhang, G.; Li, K.; Li, B.; Chi, H.; Yao, Y.; Fan, Z. Reactive power optimization of a distribution network with high-penetration of wind and solar renewable energy and electric vehicles. Prot. Control. Mod. Power Syst. 2022, 7, 51. [Google Scholar] [CrossRef]
- Wang, Y.; Qiu, D.; Strbac, G.; Gao, Z. Coordinated electric vehicle active and reactive power control for active distribution networks. IEEE Trans. Ind. Inform. 2022, 19, 1611–1622. [Google Scholar] [CrossRef]
- El-Bayeh, C.Z.; Alzaareer, K.; Brahmi, B.; Zellagui, M. A novel algorithm for controlling active and reactive power flows of electric vehicles in buildings and its impact on the distribution network. World Electr. Veh. J. 2020, 11, 43. [Google Scholar] [CrossRef]
- Colombino, M.; Dall’Anese, E.; Bernstein, A. Online optimization as a feedback controller: Stability and tracking. IEEE Trans. Control. Netw. Syst. 2019, 7, 422–432. [Google Scholar] [CrossRef]
- Hauswirth, A.; Bolognani, S.; Hug, G.; Dörfler, F. Timescale separation in autonomous optimization. IEEE Trans. Autom. Control. 2020, 66, 611–624. [Google Scholar] [CrossRef]
- Bianchin, G.; Cortés, J.; Poveda, J.I.; Dall’Anese, E. Time-varying optimization of LTI systems via projected primal-dual gradient flows. IEEE Trans. Control. Netw. Syst. 2021, 9, 474–486. [Google Scholar] [CrossRef]
- Menta, S.; Hauswirth, A.; Bolognani, S.; Hug, G.; Dörfler, F. Stability of dynamic feedback optimization with applications to power systems. In Proceedings of the 2018 56th Annual Allerton Conference on Communication, Control, and Computing (Allerton), Monticello, IL, USA, 2–5 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 136–143. [Google Scholar]
- Todescato, M.; Simpson-Porco, J.W.; Dörfler, F.; Carli, R.; Bullo, F. Online distributed voltage stress minimization by optimal feedback reactive power control. IEEE Trans. Control. Netw. Syst. 2017, 5, 1467–1478. [Google Scholar] [CrossRef]
- Ortmann, L.; Hauswirth, A.; Caduff, I.; Dörfler, F.; Bolognani, S. Experimental validation of feedback optimization in power distribution grids. Electr. Power Syst. Res. 2020, 189, 106782. [Google Scholar] [CrossRef]
- Picallo, M.; Ortmann, L.; Bolognani, S.; Dörfler, F. Adaptive real-time grid operation via Online Feedback Optimization with sensitivity estimation. Electr. Power Syst. Res. 2022, 212, 108405. [Google Scholar] [CrossRef]
- Ortmann, L.; Rubin, C.; Scozzafava, A.; Lehmann, J.; Bolognani, S.; Dörfler, F. Deployment of an Online Feedback Optimization Controller for Reactive Power Flow Optimization in a Distribution Grid. arXiv 2023, arXiv:2305.06702. [Google Scholar]
- Zhan, S.; Morren, J.; van den Akker, W.; van der Molen, A.; Paterakis, N.G.; Slootweg, J. Fairness-incorporated Online Feedback Optimization for Real-time Distribution Grid Management. IEEE Trans. Smart Grid 2023, 15, 1792–1806. [Google Scholar] [CrossRef]
- Ortmann, L.; Maeght, J.; Panciatici, P.; Dörfler, F.; Bolognani, S. Online Feedback Optimization for Transmission Grid Operation. arXiv 2022, arXiv:2212.07795. [Google Scholar]
- Carnevale, G.; Mimmo, N.; Notarstefano, G. Nonconvex Distributed Feedback Optimization for Aggregative Cooperative Robotics. arXiv 2023, arXiv:2302.01892. [Google Scholar]
- Terpin, A.; Fricker, S.; Perez, M.; de Badyn, M.H.; Dörfler, F. Distributed feedback optimisation for robotic coordination. In Proceedings of the 2022 American Control Conference (ACC), Atlanta, GA, USA, 8–10 June 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 3710–3715. [Google Scholar]
- Olives-Camps, J.C.; del Nozal, Á.R.; Mauricio, J.M.; Maza-Ortega, J.M. A model-less control algorithm of DC microgrids based on feedback optimization. Int. J. Electr. Power Energy Syst. 2022, 141, 108087. [Google Scholar] [CrossRef]
- Cheng, Y.; Liu, T.; Hill, D.J. Distributed feedback optimization in fully inverter based islanded microgrids for accurate reactive power sharing and fast response in P - f Droop. In Proceedings of the 12th IET International Conference on Advances in Power System Control, Operation and Management (APSCOM 2022), Hong Kong, China, 7–9 November 2022; Volume 2022, pp. 234–239. [Google Scholar] [CrossRef]
- Cheng, Y.; Liu, T.; Hill, D.J. Distributed feedback optimisation based optimal power flow control in fully inverter based islanded AC microgrids. IET Smart Grid 2023, 6, 572–584. [Google Scholar] [CrossRef]
- Al-Ogaili, A.S.; Hashim, T.J.T.; Rahmat, N.A.; Ramasamy, A.K.; Marsadek, M.B.; Faisal, M.; Hannan, M.A. Review on scheduling, clustering, and forecasting strategies for controlling electric vehicle charging: Challenges and recommendations. IEEE Access 2019, 7, 128353–128371. [Google Scholar] [CrossRef]
- Mukherjee, J.C.; Gupta, A. A review of charge scheduling of electric vehicles in smart grid. IEEE Syst. J. 2014, 9, 1541–1553. [Google Scholar] [CrossRef]
- Amjad, M.; Ahmad, A.; Rehmani, M.H.; Umer, T. A review of EVs charging: From the perspective of energy optimization, optimization approaches, and charging techniques. Transp. Res. Part D Transp. Environ. 2018, 62, 386–417. [Google Scholar] [CrossRef]
- Pasha, J.; Li, B.; Elmi, Z.; Fathollahi-Fard, A.M.; Lau, Y.y.; Roshani, A.; Kawasaki, T.; Dulebenets, M.A. Electric Vehicle Scheduling: State of the Art, Critical Challenges, and Future Research Opportunities. J. Ind. Inf. Integr. 2024, 38, 100561. [Google Scholar] [CrossRef]
- Jiang, W.; Zhen, Y. A real-time EV charging scheduling for parking lots with PV system and energy store system. IEEE Access 2019, 7, 86184–86193. [Google Scholar] [CrossRef]
- Bouhouras, A.S.; Kothona, D.; Gkaidatzis, P.A.; Christoforidis, G.C. Distribution network energy loss reduction under EV charging schedule. Int. J. Energy Res. 2022, 46, 8256–8270. [Google Scholar] [CrossRef]
- Khodayar, M.E.; Wu, L.; Li, Z. Electric vehicle mobility in transmission-constrained hourly power generation scheduling. IEEE Trans. Smart Grid 2013, 4, 779–788. [Google Scholar] [CrossRef]
- Yong, J.Y.; Ramachandaramurthy, V.K.; Tan, K.M.; Mithulananthan, N. Bi-directional electric vehicle fast charging station with novel reactive power compensation for voltage regulation. Int. J. Electr. Power Energy Syst. 2015, 64, 300–310. [Google Scholar] [CrossRef]
- Pogaku, N.; Prodanovic, M.; Green, T.C. Modeling, Analysis and Testing of Autonomous Operation of an Inverter-Based Microgrid. IEEE Trans. Power Electron. 2007, 22, 613–625. [Google Scholar] [CrossRef]
- Kersting, W.H. Distribution System Modeling and Analysis; CRC Press: London, UK, 2017. [Google Scholar]
- Bidram, A.; Lewis, F.L.; Davoudi, A. Distributed control systems for small-scale power networks: Using multiagent cooperative control theory. IEEE Control. Syst. Mag. 2014, 34, 56–77. [Google Scholar]














Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, Y.; Ching, T.W. Distributed Real-Time Feedback Optimization for Renewable Energy Sources and Vehicle-to-Grid Power Compensation of Electric Vehicle Chargers in Distribution Systems. Sustainability 2024, 16, 2432. https://doi.org/10.3390/su16062432
Cheng Y, Ching TW. Distributed Real-Time Feedback Optimization for Renewable Energy Sources and Vehicle-to-Grid Power Compensation of Electric Vehicle Chargers in Distribution Systems. Sustainability. 2024; 16(6):2432. https://doi.org/10.3390/su16062432
Chicago/Turabian StyleCheng, Y., and T. W. Ching. 2024. "Distributed Real-Time Feedback Optimization for Renewable Energy Sources and Vehicle-to-Grid Power Compensation of Electric Vehicle Chargers in Distribution Systems" Sustainability 16, no. 6: 2432. https://doi.org/10.3390/su16062432
APA StyleCheng, Y., & Ching, T. W. (2024). Distributed Real-Time Feedback Optimization for Renewable Energy Sources and Vehicle-to-Grid Power Compensation of Electric Vehicle Chargers in Distribution Systems. Sustainability, 16(6), 2432. https://doi.org/10.3390/su16062432