

Modular Autonomous Vehicles’ Application in Public Transport Networks: Conceptual Analysis on Airport Connection




Abstract
1. Introduction
1.1. Background
1.2. State of the Art of Autonomous Vehicles
1.3. Objective and Contributions
2. Current Solution
3. Materials and Methods—MAV Solution
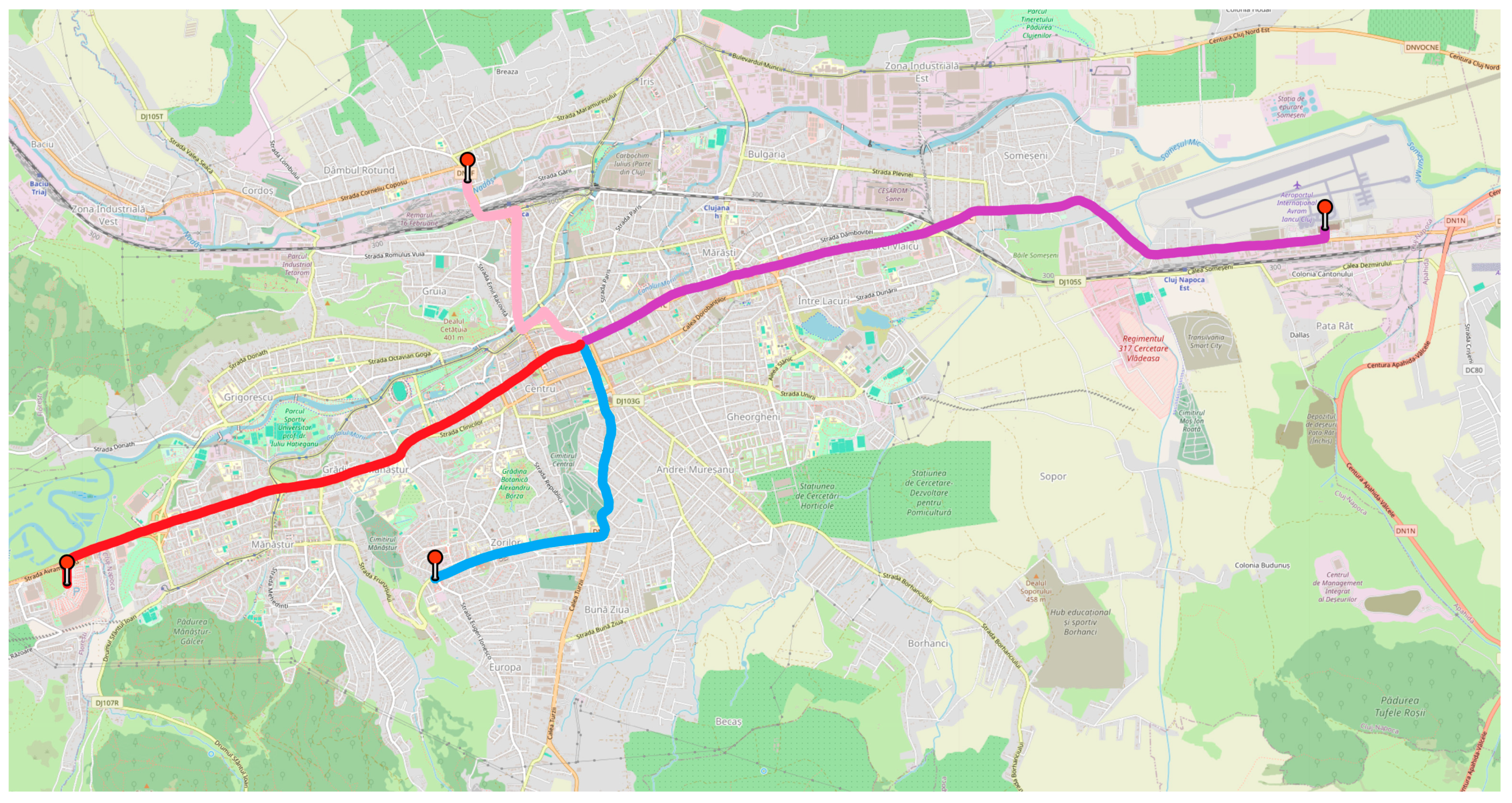
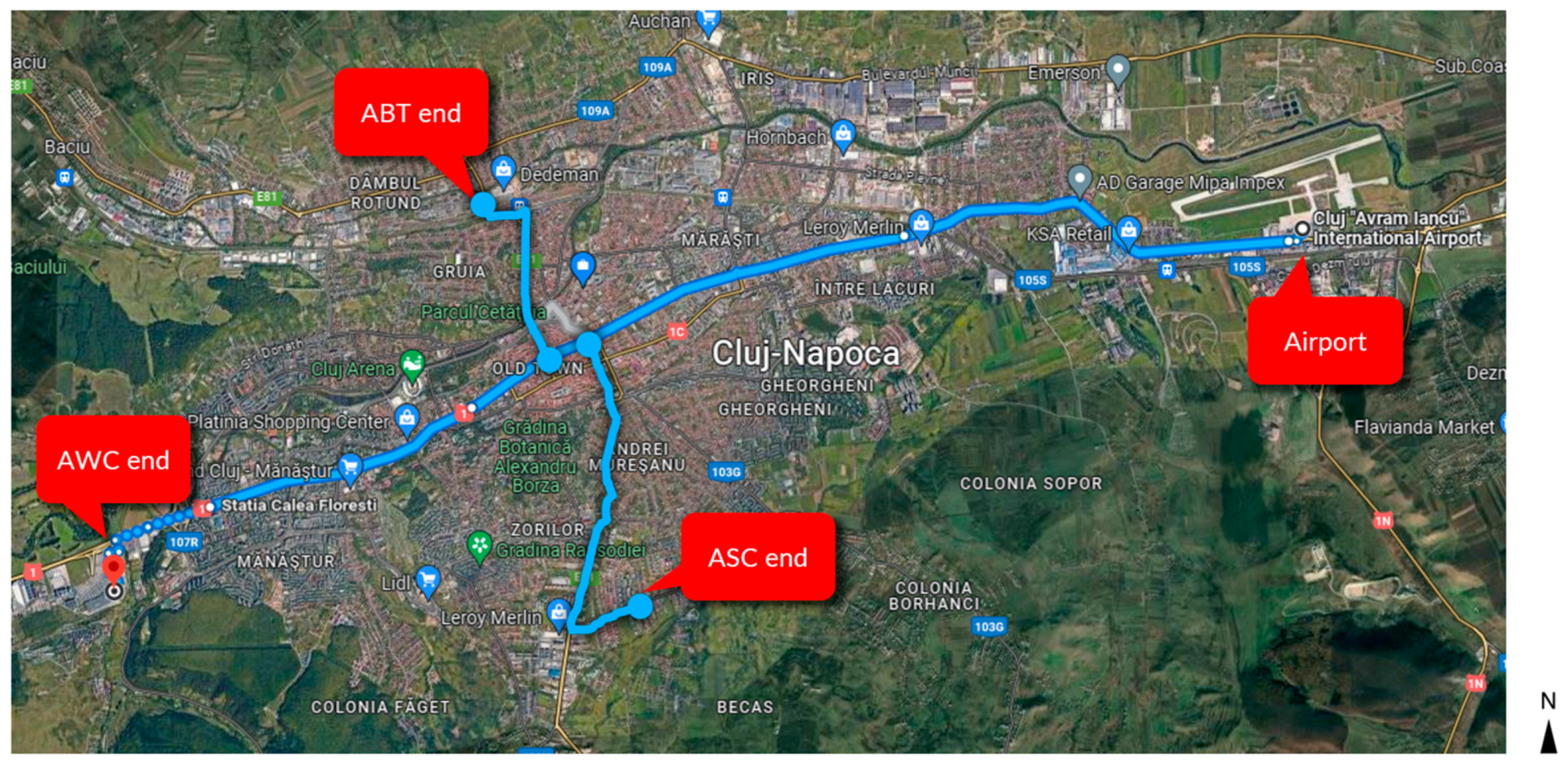
3.1. Definition and Digitization of Travel Routes
- ABT—modules that ride from the airport to the bus terminal, in the northern vicinity of the city center;
- ASC—modules that ride from the airport to the southern area of the city, passing through some of the main neighborhoods;
- AWC—modules that ride from the airport to the western area of the city, passing through different main neighborhoods than the ones ASC is passing through.
- ABT end—end of the line for the route from the airport to the bus terminal;
- ASC end—end of the line for the route from the airport to the southern area of Cluj;
- AWC end—end of the line for the route from the airport to the western area of Cluj.
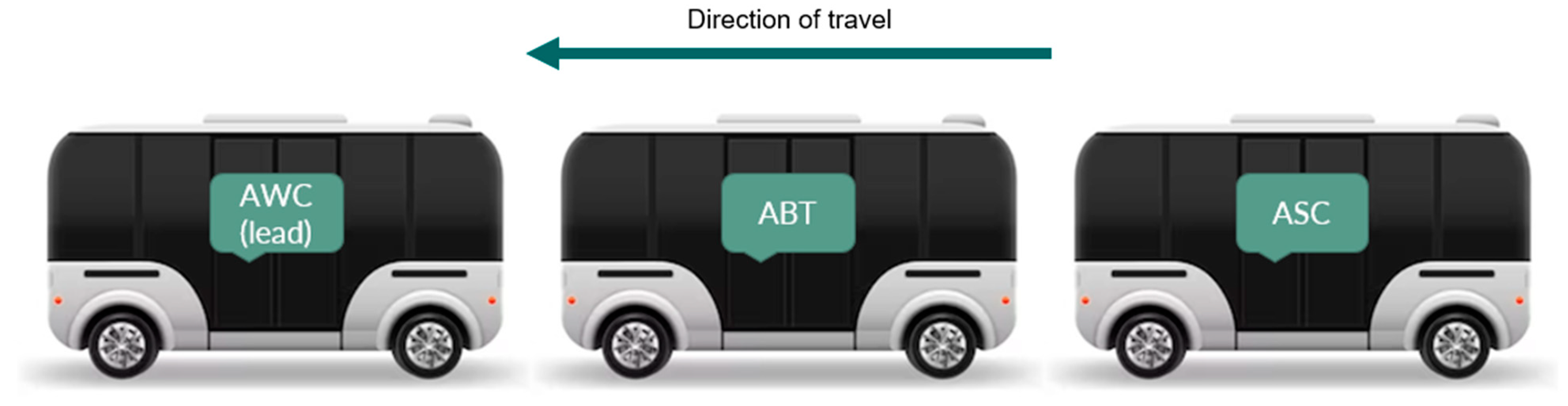
3.2. Definition and Modeling of Vehicles
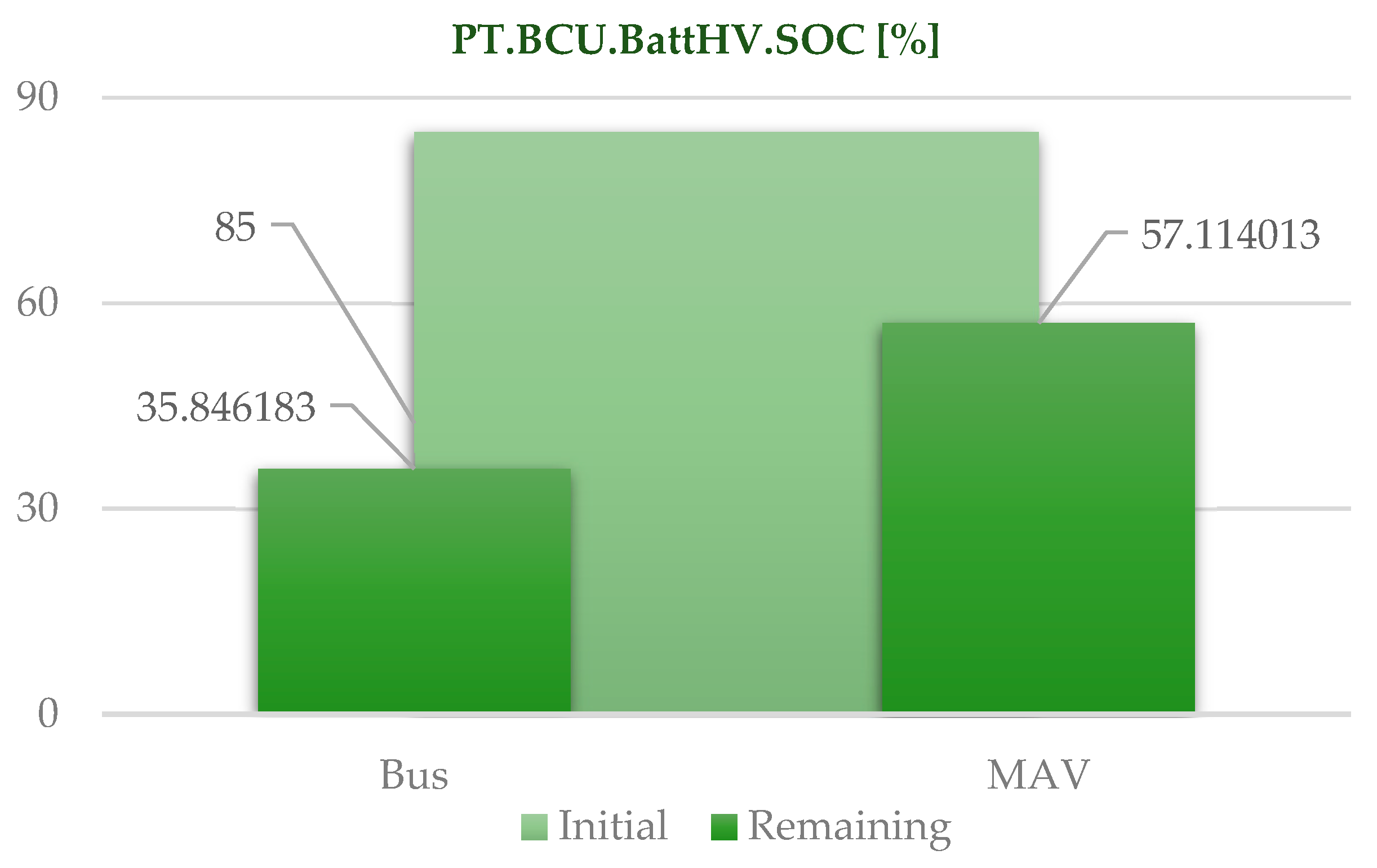
4. Results
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ukaogo, P.O.; Ewuzie, U.; Onwuka, C. Environmental pollution: Causes, effects, and the remedies. In Microorganisms for Sustainable Environment and Health; Elsevier: Amsterdam, The Netherlands, 2020; pp. 419–429. [Google Scholar]
- Olsson, A.C.; Gustavsson, P.; Kromhout, H.; Peters, S.; Vermeulen, R.; Brüske, I.; Pesch, B.; Siemiatycki, J.; Pintos, J.; Brüning, T.; et al. Exposure to Diesel Motor Exhaust and Lung Cancer Risk in a Pooled Analysis from Case-Control Studies in Europe and Canada. Am. J. Respir. Crit. Care Med. 2010, 183, 941–948. [Google Scholar] [CrossRef] [PubMed]
- Kelland, K. Diesel Exhaust Fumes Can. Cause Cancer, WHO Says; Reuters Agency: London, UK, 2012. [Google Scholar]
- Bethoux, O. Hydrogen Fuel Cell Road Vehicles: State of the Art and Perspectives. Energies 2020, 13, 5843. [Google Scholar] [CrossRef]
- Beckers, C.J.J.; Besselink, I.J.M.; Nijmeijer, H. The State-of-the-Art of Battery Electric City Buses. In Proceedings of the 34th International Electric Vehicle Symposium and Exhibition, Nanjing, China, 3–6 June 2021. [Google Scholar]
- Chen, L.; Li, Y.; Huang, C.; Li, B.; Xing, Y.; Tian, D.; Li, L.; Hu, Z.; Na, X.; Li, Z.; et al. Milestones in Autonomous Driving and Intelligent Vehicles: Survey of Surveys. IEEE Trans. Intell. Veh. 2023, 8, 1046–1056. [Google Scholar] [CrossRef]
- Society of Automotive Engineers SAE Levels of Driving Automation™ Refined for Clarity and International Audience; SAE International: Warrendale, PA, USA, 3 May 2021; Available online: https://www.sae.org/blog/sae-j3016-update (accessed on 1 March 2022).
- Chan, T.K.; Chin, C.S. Review of Autonomous Intelligent Vehicles for Urban Driving and Parking. Electronics 2021, 10, 1021. [Google Scholar] [CrossRef]
- Xu, Q.; Li, K.; Wang, J.; Yuan, Q.; Yuan, Y.; Chu, W. The status, challenges, and trends: An interpretation of technology roadmap of intelligent and connected vehicles in China (2020). J. Intell. Connect. Veh. 2022, 5, 1–7. [Google Scholar] [CrossRef]
- Lanxon I Rode the World’s First Autonomous Public Bus Service. Cnet, 18 May 2023. Available online: https://www.cnet.com/tech/i-rode-the-worlds-first-autonomous-public-bus-service/ (accessed on 7 October 2023).
- Hall, S. Driverless Buses Are Arriving Soon in These 3 European Cities; World Economic Forum: Cologny, Switzerland, 27 January 2023; Available online: https://www.weforum.org/agenda/2023/01/autonomous-buses-geneva-project/ (accessed on 7 October 2023).
- Goldbach; Sickmann, J.; Pitz, T.; Zimasa, T. Towards autonomous public transportation: Attitudes and intentions of the local population. Transp. Res. Interdiscip. Perspect. 2022, 13, 100504. [Google Scholar] [CrossRef]
- ULTIMO Overview. Available online: https://ultimo-he.eu/about-ultimo/#overview (accessed on 7 October 2023).
- CAVForth Ambitious and Complex CAVForth Autonomous Bus Service Launches in Scotland Controlled by Fusion Processing’s Automated Drive System. 11 May 2023. Available online: https://www.cavforth.com/ambitious-and-complex-cavforth-autonomous-bus-service-launches-in-scotland-controlled-by-fusion-processings-automated-drive-system/ (accessed on 7 October 2023).
- Iclodean, C.; Cordos, N.; Varga, B.O. Autonomous Shuttle Bus for Public Transportation: A Review. Energies 2020, 13, 2917. [Google Scholar] [CrossRef]
- Cluj-Napoca CTP Cluj-Napoca Website. Available online: https://ctpcj.ro/index.php/ro/ (accessed on 10 October 2023).
- Solaris Bus & Coach sp. z o.o. Zero Emissions Powertrains—Product Catalogue 2023. Available online: https://www.solarisbus.com/public/assets/content/pojazdy/Katalogi_2023/EN_Zeroemisyjne_1920_x_1080.pdf (accessed on 5 December 2023).
- Solaris Bus & Coach sp. z o.o. Solaris Urbino 9 LE Electric—Technical Details. Available online: https://www.solarisbus.com/public/assets/Biuro_prasowe/2021_09_30_premiera_U9_LE_electric/Technical_data_Urbino_9_LE_electric.pdf (accessed on 5 December 2023).
- Varga, B.O.; Mariasiu, F.; Miclea, C.D.; Szabo, I.; Sirca, A.; Nicolae, V. Direct and Indirect Environmental Aspects of an Electric Bus Fleet Under Service. Energies 2020, 13, 336. [Google Scholar] [CrossRef]
- The European Parliament and The Council of the European Union Regulation (EU) 2019/2144 of the European Parliament and of the Council of 27 November 2019. 27 November 2019. Available online: https://eur-lex.europa.eu/eli/reg/2019/2144/oj (accessed on 10 December 2023).
- Ansariyar, A.; Tahmasebi, M. Investigating the effects of gradual deployment of market penetration rates (MPR) of connected vehicles on delay time and fuel consumption. J. Intell. Connect. Veh. 2022, 5, 188–198. [Google Scholar] [CrossRef]
- Liu, Y.; Wu, F.; Liu, Z.; Wang, K.; Wang, F.; Qu, X. Can language models be used for real-world urban-delivery route optimization? Innov. 2023, 4, 100520. [Google Scholar] [CrossRef] [PubMed]
- Zhu, W.; Wu, J.; Fu, T.; Wang, J.; Zhang, J.; Shangguan, Q. Dynamic prediction of traffic incident duration on urban expressways: A deep learning approach based on LSTM and MLP. J. Intell. Connect. Veh. 2021, 4, 80–91. [Google Scholar] [CrossRef]
- Qu, X.; Lin, H.; Liu, Y. Envisioning the future of transportation: Inspiration of ChatGPT and large models. Commun. Transp. Res. 2023, 3, 100103. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Population | 286.598 |
| Number of travelers using public transport (annually) | 76.918 |
| Number of available routes | 55 |
| Number of bus stops | 305 |
| Number of available buses | 246 |
| Start End | A 1 ASC Out | ASC Out ABT Out | ASC Out ASC End | ABT Out AWC End | ABT Out ABT End |
|---|---|---|---|---|---|
| AWC | L 2 | L | L | ||
| ABT | L | ||||
| ASC | L |
| Parameter | Value |
|---|---|
| Body Mass | 11.098 [kg] |
| Maximum Mechanical Power | 160 [kW] |
| Maximum Torque | 1.400 [Nm] |
| Battery Capacity | 124 [kWh] |
| Idle Voltage | 600 [V] |
| Passenger Capacity | 50 |
| Load (front/center/rear) | 1.200/1.200/1.200 [kg] |
| Parameter | Value |
|---|---|
| Body Mass | 2.130 [kg] |
| Maximum Mechanical Power | 16 [kW] |
| Maximum Torque | 41.25 [Nm] |
| Battery Capacity | 10 [kWh] |
| Idle Voltage | 48 [V] |
| Passenger Capacity | 12 |
| Load (front/center/rear) | 300/300/300 [kg] |
| Parameter | Value |
|---|---|
| Total Body Mass | 8.520 [kg] |
| Total Maximum Mechanical Power | 64 [kW] |
| Total Maximum Torque | 165 [Nm] |
| Total Battery Capacity | 10 [kWh] |
| Idle Voltage | 48 [V] |
| Passenger Capacity | 48 |
| Total Load (leader, follower #1, #2, #3) | 900/900/900/900 [kg] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oargă, I.-T.; Varga, B.O.; Moldovanu, D.; Cărăușan, H.; Prunean, G. Modular Autonomous Vehicles’ Application in Public Transport Networks: Conceptual Analysis on Airport Connection. Sustainability 2024, 16, 1512. https://doi.org/10.3390/su16041512
Oargă I-T, Varga BO, Moldovanu D, Cărăușan H, Prunean G. Modular Autonomous Vehicles’ Application in Public Transport Networks: Conceptual Analysis on Airport Connection. Sustainability. 2024; 16(4):1512. https://doi.org/10.3390/su16041512
Chicago/Turabian StyleOargă, Ioan-Tudor, Bogdan Ovidiu Varga, Dan Moldovanu, Horațiu Cărăușan, and Gabriel Prunean. 2024. "Modular Autonomous Vehicles’ Application in Public Transport Networks: Conceptual Analysis on Airport Connection" Sustainability 16, no. 4: 1512. https://doi.org/10.3390/su16041512
APA StyleOargă, I.-T., Varga, B. O., Moldovanu, D., Cărăușan, H., & Prunean, G. (2024). Modular Autonomous Vehicles’ Application in Public Transport Networks: Conceptual Analysis on Airport Connection. Sustainability, 16(4), 1512. https://doi.org/10.3390/su16041512