
Towards Refining Bio-Inspired Hydro-Actuated Building Facades by Emphasising the Importance of Hybrid Adaptability

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Method
3. Literature Review
3.1. Stimuli-Responsive Mechanisms in the Field of Architecture
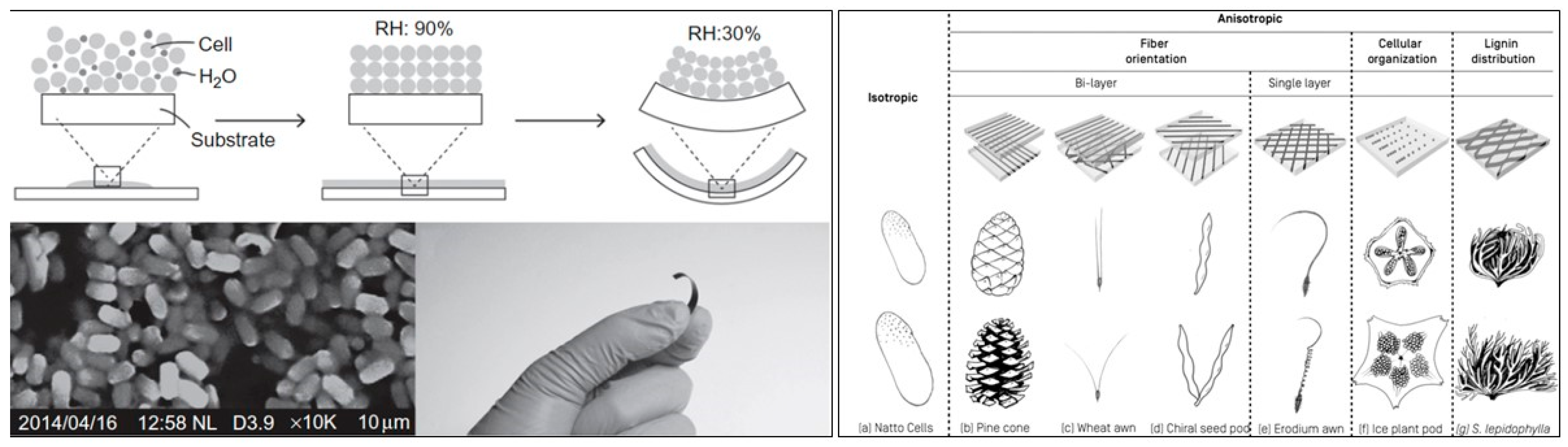
3.1.1. The Bilayered Hydro-Actuated Systems
Cellulose-Based Actuators
Osmosis-Based Actuators
3.1.2. The Multi-Layered Hydro-Actuated Systems
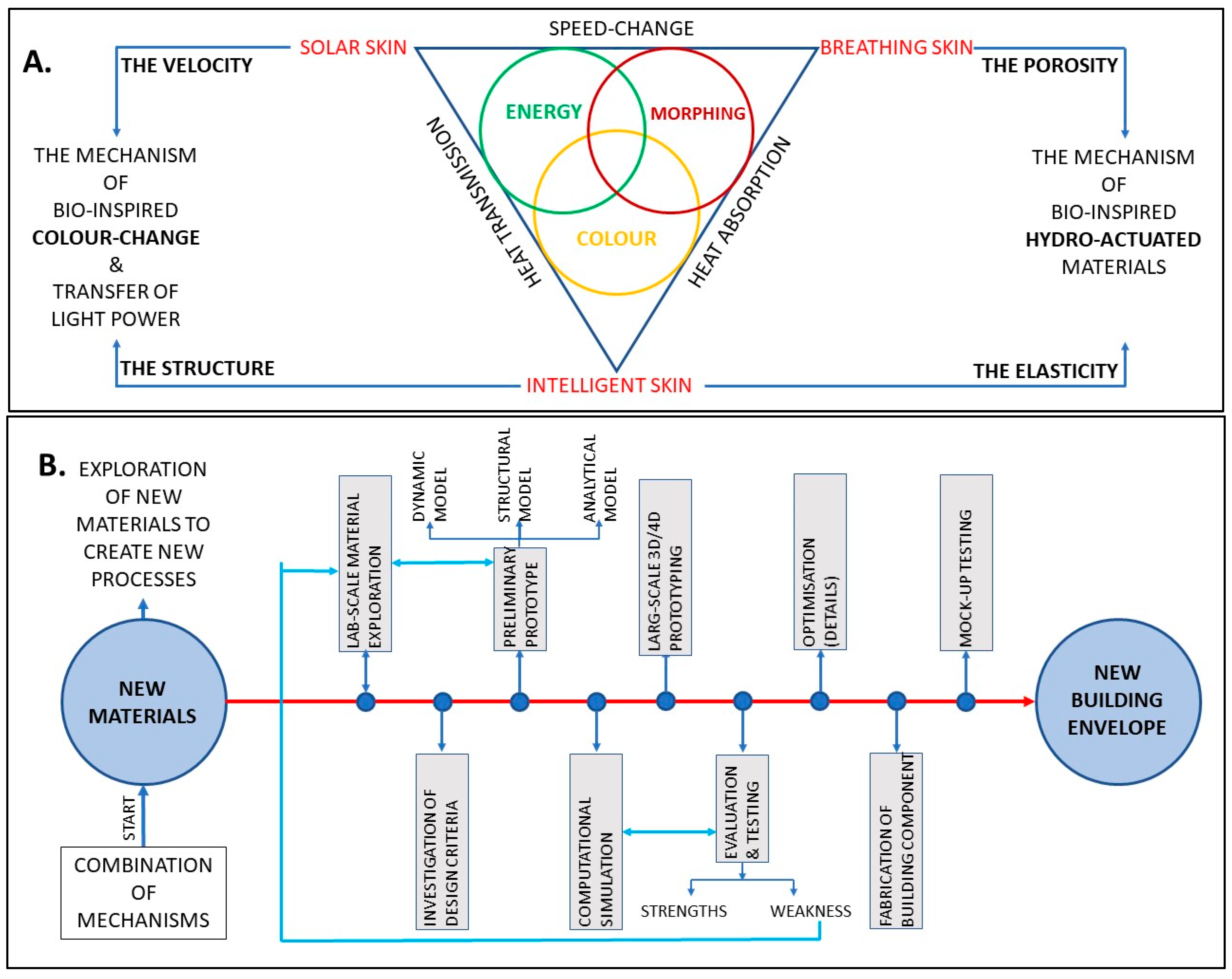
3.1.3. The Process of Scaling up and the Importance of the Digital Advances
3.2. Stimuli-Responsive Mechanisms in Other Fields of Studies
4. Material
5. Case Studies
5.1. Biological Materials
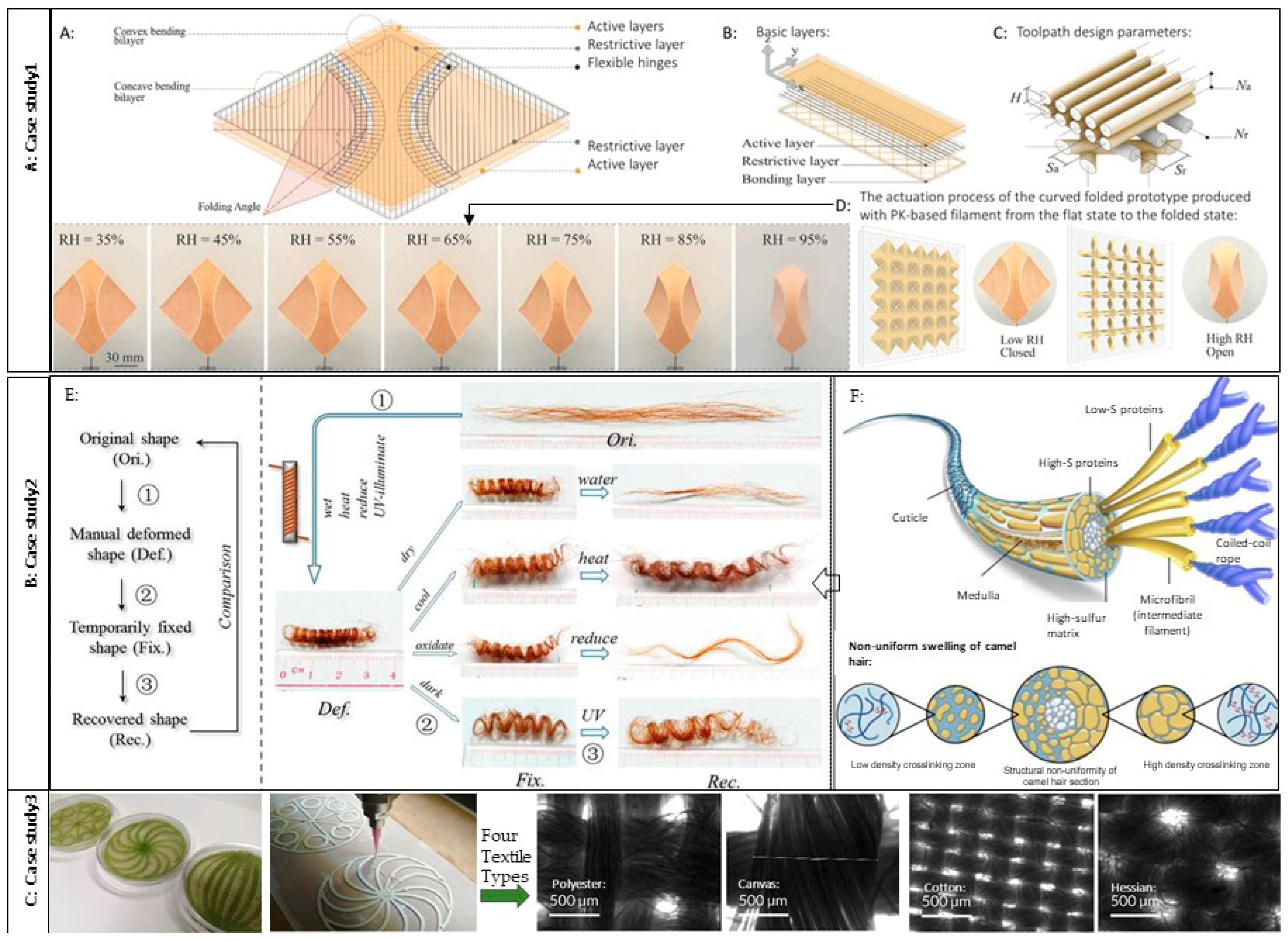
5.1.1. Case Study 1: Wood-Based Hygromorphic Actuator
5.1.2. Case Study 2: Camel Wool-Based Hygromorphic Actuator
5.1.3. Case Study 3: Algae-Based Hygromorphic Actuator
5.2. Spore-Based Materials
5.2.1. Case Study 4: Bacterial Spore-Based Actuator
5.2.2. Case Study 5: Spore-Based Hygromorphic Actuator
6. Challenges
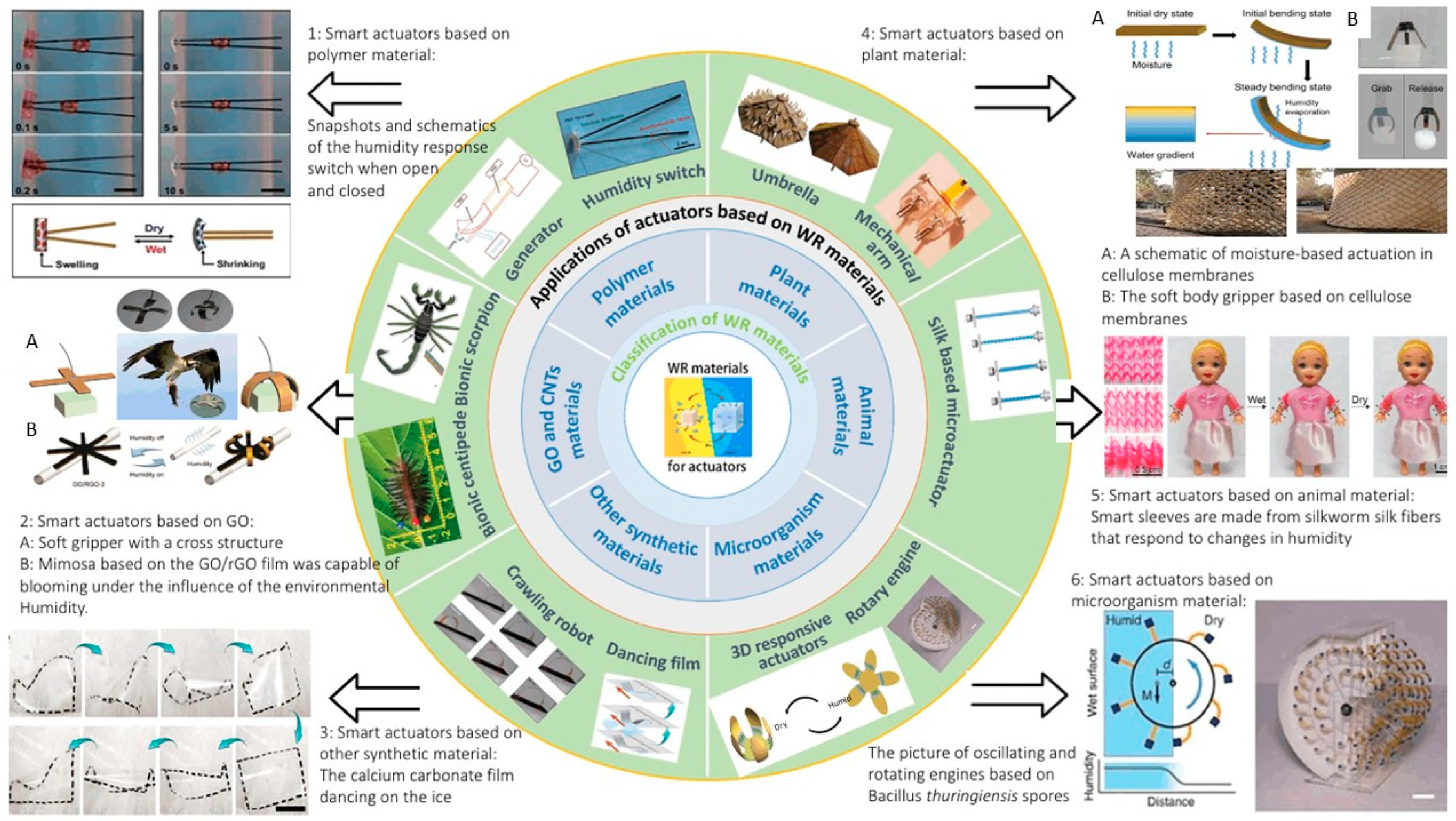
- Firstly, these actuators face several challenges when it comes to further development and application, including actuator design (response speed, energy power, movement pattern, good scalability and reversibility, different thicknesses of layers, and so on), external humidity control, and compatibility. For instance, different thicknesses of the film layers will affect the response speed and drive capability, or different structures can cause the actuators to have different movement modes, such as a cellulose-based architectural surface derived from balsa wood; by adjusting the location of the cellulose membrane, the actuator can provide a variety of deformations [13]. Therefore, to overcome these challenges, researchers/designers need to carry out a series of optimisations from the material selection, the size design, structure design, movement mode and so on [44].
- Secondly, connecting/merging two materials or layers in a one-step process is imperative due to the difference in the chemical structure of the two layers [18,45]. In addition, the swelling of the hydrophilic layers will generate stress and strains at the interface connecting the two materials [21]. To obtain these actuators and implement them at architectural-scale applications, it is important to have a sufficiently strong adhesion between two materials/layers, because such composite materials must respond to stimuli in the environment with strong movements of parts of the structures. For example, Poppinga et al. in the second case study mentioned a simple way of generating a bilayer structure with a very strong adhesion between them [18]. This involves covalently linking one layer to next, which allows very dissimilar polymer layers such as hydrogels and hydrophobic molecules to be linked together in a permanent fashion.
- Thirdly, it is highly desirable that these actuators exhibit reversible responses and excellent durability of the response in real environmental situations. For example, Cakmak et al. in the case study of a water-resistance actuator introduced a strategy that responds reversibly after repetitive immersion into water [25]. It is essential for MS-responsive building facades, because responsive envelopes have a large potential for reducing carbon emission, and they can improve energy management by reducing the overall energy use and harvesting renewable energy by converting it to electricity or by storing it as thermal energy in the building mass. For instance, responsive building envelopes using glazed components with controllable optical and physical properties have been shown to provide significant energy demand reductions compared to traditional facades [46].
- Fourthly, the combination of light with other stimuli is a challenge, since light is an especially attractive external stimulus as it plays a major role within architecture by impacting the lighting of spaces as well as the passive heating and the spatial qualities/sense of spaces. However, most of the photo-responsive materials reported so far involve stimulation with ultraviolet light, which may cause damage to biological samples [12].
- Finally, the development of materials suitable for stimuli response in targeted actuation ranges with desirable mechanical properties and that are compatible with the 3D printing process remains a challenge. In this regard, the compatibility of these actuators with the 3D/4D printing for architectural purposes is essential to create real stimuli-responsive components [23]. In this regard, further studies on the fabrication of WR systems by utilising existing industrial manufacturing techniques seem promising. For instance, 3D printing, which is used to manufacture complicated geometries, could be a great avenue to program and scale up different types of materials’ water responsiveness [17].
7. Discussion
8. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pal, S.K.; Takano, A.; Alanne, K.; Palonen, M.; Siren, K. A multi-objective life cycle approach for optimal building design: A case study in Finnish context. J. Clean. Prod. 2017, 143, 1021–1035. [Google Scholar] [CrossRef]
- Khosromanesh, R.; Asefi, M. Form-finding Mechanism Derived from Plant Movement in Response to Environmental Conditions for Building Envelopes. J. Sustain. Cities Soc. 2019, 51, 101782. [Google Scholar] [CrossRef]
- Armstrong, R. Towards the microbial home: An overview of developments in next-generation sustainable architecture. Microb. Biotechnol. 2023, 16, 1112–1130. [Google Scholar] [CrossRef] [PubMed]
- Ürge-Vorsatz, D. Buildings. In Mitigation. Working Group III Contribution to the Fifth Assessment Report of the Intergovernmental Panel of Climate Change; Cambridge University Press: Cambridge, UK, 2014; pp. 671–738. [Google Scholar]
- van Ellen, L.; Bridgens, B.; Burford, N.; Heidrich, O. Rhythmic buildings-a framework for sustainable adaptable architecture. Build. Environ. 2021, 203, 108068. [Google Scholar] [CrossRef]
- Imhof, B.; Gruber, P. Built to Grow: Blending Architecture and Biology; Edition Angewandte; Birkhäuser: Basel, Switzerland, 2015; pp. 17–38. [Google Scholar]
- UN Environment Programme (UNEP). Global Status Report for Buildings and Construction Sector. 2019. Available online: https://www.unep.org/resources/publication/2019-global-status-report-buildings-and-construction-sector (accessed on 29 November 2021).
- UN Environment Programme (UNEP). Global Status Report for Buildings and Construction. 2022. Available online: https://www.unep.org/resources/publication/2022-global-status-report-buildings-and-construction (accessed on 9 November 2022).
- Aziz, M.S.S.; Amr, Y.E.L. Biomimicry as an approach for bio-inspired structure with the aid of computation. Alex. Eng. J. 2016, 55, 707–714. [Google Scholar] [CrossRef]
- Yuan, Y.; Yu, X.; Yang, X.; Xiao, Y.; Xiang, B.; Wang, Y. Bionic Building Energy Efficiency and Bionic Green Architecture: A Review. Renew. Sustain. Energy Rev. 2017, 74, 771–787. [Google Scholar] [CrossRef]
- López, M.; Rubio, R.; Martín, S.; Croxford, B. How plants inspire façades. From plants to architecture: Biomimetic principles for the development of adaptive architectural envelopes. Renew. Sustain. Energy Rev. 2017, 67, 692–703. [Google Scholar] [CrossRef]
- Cao, Z.Q.; Wang, G.J. Multi-Stimuli-Responsive Polymer Materials: Particles, Films, and Bulk Gels. Chem. Rec. 2016, 16, 1398–1435. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, C.; Wang, R.; Tan, W.; Gu, Y.; Yu, X.; Zhu, L.; Liu, L. Development and challenges of smart actuators based on water-responsive materials. Soft Matter 2022, 18, 5725–5741. [Google Scholar] [CrossRef]
- Dong, Y.; Wang, J.; Guo, X.; Yang, S.; Ozen, M.O.; Chen, P.; Liu, X.; Du, W.; Xiao, F.; Demirci, U.; et al. Multi-stimuli-responsive programmable biomimetic actuator. Nat. Commun. 2019, 10, 4087. [Google Scholar] [CrossRef]
- Holstov, A.; Farmer, G.; Bridgens, B. Sustainable materialisation of responsive architecture. Sustainability 2017, 9, 435. [Google Scholar] [CrossRef]
- Khosromanesh, R.; Asefi, M. Towards an implementation of bio-inspired hydro-actuated building façade. Intell. Build. Int. 2022, 14, 151–171. [Google Scholar] [CrossRef]
- Park, Y.; Chen, X. Water-responsive materials for sustainable energy applications. J. Mater. Chem. A 2020, 8, 15227–15244. [Google Scholar] [CrossRef]
- Poppinga, S.; Zollfrank, C.; Prucker, O.; Rühe, J.; Menges, A.; Cheng, T.; Speck, T. Toward a new generation of smart biomimetic actuators for architecture. Adv. Mater. 2018, 30, e1703653. [Google Scholar] [CrossRef]
- Fiorito, F.; Sauchelli, M.; Arroyo, D.; Pesenti, M.; Imperadori, M.; Masera, G.; Ranzi, G. Shape Morphing Solar Shadings: A Review. Renew. Sustain. Energy Rev. 2016, 55, 863–884. [Google Scholar] [CrossRef]
- Mader, A.; Langer, M.; Knippers, J.; Speck, O. Learning from plant movements triggered by bulliform cells: The biomimetic cellular actuator. J. R. Soc. Interface 2020, 17, 20200358. [Google Scholar] [CrossRef]
- Menges, A.; Reichert, S. Performative Wood: Physically Programming the Responsive Architecture of the HygroScope and HygroSkin Projects. Archit. Des. 2015, 85, 66–73. [Google Scholar] [CrossRef]
- Wood, D.M.; Correa, D.; Krieg, O.D.; Menges, A. Material computation 4D timber construction: Toward building-scale hygroscopic actuated, self-constructing timber surfaces. Int. J. Archit. Comput. 2016, 14, 49–62. [Google Scholar] [CrossRef]
- Tahouni, Y.; Cheng, T.; Lajewski, S.; Benz, J.; Bonten, C.; Wood, D.; Menges, A. Codesign of Biobased Cellulose-Filled Filaments and Mesostructures for 4D Printing Humidity Responsive Smart Structures. 3D Print. Addit. Manuf. 2023, 10, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Yao, L.; Ishii, H. Robotic Systems and Autonomous Platforms: Advances in Materials and Manufacturing; Shawn, M.W., Michael, S.S., Eds.; Woodhead Publishing in Materials: Cambridge, UK, 2019. [Google Scholar]
- Cakmak, O.; El Tinay, H.O.; Chen, X.; Sahin, O. Spore-Based Water-Resistant Water-responsive Actuators with High Power Density. Adv. Mater. Technol. 2019, 4, 1800596. [Google Scholar] [CrossRef]
- Speck, T.; Cheng, T.; Klimm, F.; Menges, A.; Poppinga, S.; Speck, O.; Tahouni, Y.; Tauber, F.; Thielen, M. Plants as inspiration for material-based sensing and actuation in soft robots and machines. MRS Bull. 2023, 48, 730–745. [Google Scholar] [CrossRef]
- Dawson, C.; Vincent, J.F.; Rocca, A.M. How pine cones open. Nature 1997, 390, 668. [Google Scholar] [CrossRef]
- Gaver, W. What Should We Expect from Research through Design. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Austin, TX, USA, 5–10 May 2012; CHI: Austin, TX, USA, 2012. [Google Scholar]
- Reyssat, E.; Mahadevan, L. Hygromorphs: From pine cones to biomimetic bilayers. J. R. Soc. Interface 2009, 6, 951–957. [Google Scholar] [CrossRef]
- Menges, A. Hygro-Skin: Meteorosensitive Pavilion. 2013. Available online: http://www.achimmenges.net/ (accessed on 29 November 2021).
- Ruggeberg, M.; Burgert, I. Bio-inspired wooden actuators for large scale applications. PLoS ONE 2015, 10, e0120718. [Google Scholar] [CrossRef]
- Menges, A.; Kannenberg, F. Computational Co-design of fibrous architecture. Archit. Intell. 2022, 1, 6. [Google Scholar] [CrossRef]
- Sinibaldi, E.; Argiolas, A.; Puleo, G.L.; Mazzolai, B. Another lesson from plants: The forward osmosis-based actuator. PLoS ONE 2014, 9, e102461. [Google Scholar] [CrossRef]
- Davis, F. The Textility of Emotion: A Study Relating Computational Textile Textural Expression to Emotion. In Proceedings of the C&C ‘15: 2015 ACM SIGCHI Conference on Creativity and Cognition, New York, NY, USA, 22–25 June 2015; pp. 23–32. [Google Scholar]
- Davis, F. Softbuilt: Computational Textile Architectures; Actar D: New York, NY, USA, 2022; ISBN 1948765608/9781948765602. [Google Scholar]
- Farahi, B. Iridescence: Bio-Inspired Emotive Matter. In Proceedings of the 39th Annual Conference of the Association for Computer Aided Design in Architecture, Austin, TX, USA, 21–26 October 2019; pp. 674–683. [Google Scholar]
- Schipper, M. NNN/6 Designers Changing the Future of Fashion. 2019. Available online: https://nextnature.net/ (accessed on 9 November 2022).
- Kim, M.-J.; Kim, B.-G.; Koh, J.-S.; Yi, H. Flexural biomimetic responsive building façade using a hybrid soft robot actuator and fabric membrane. Autom. Constr. 2023, 145, 104660. [Google Scholar] [CrossRef]
- Zhang, W.; Yang, S.; Peng, R.; Shu, T.; Ren, J.; Zhong, J.; Qi, Z.; Chen, M.; Tang, Y.; Fan, Y.; et al. Hierarchically non-uniform structures determine the hydro-actuated bending deformation of camel hair. Cell Rep. Phys. Sci. 2022, 3, 100793. [Google Scholar] [CrossRef]
- Xiao, X.; Hu, J.; Gui, X.; Lu, J.; Luo, H. Is biopolymer hair a multi-responsive smart material? Polym. Chem. 2017, 8, 283–294. [Google Scholar] [CrossRef]
- Wahlström, N.; Edlund, U.; Pavia, H.; Toth, G.; Jaworski, A.; Pell, A.J.; Choong, F.X.; Shirani, H.; Nilsson, K.P.R.; Richter-Dahlfors, A. Cellulose from the green macroalgae Ulva lactuca: Isolation, characterization, optotracing, and production of cellulose nanofibrils. Cellulose 2020, 27, 3707–3725. [Google Scholar] [CrossRef]
- Stefanova, A.; In-Na, P.; Caldwell, G.S.; Bridgens, B.; Armstrong, R. Photosynthetic textile biocomposites: Using laboratory testing and digital fabrication to develop flexible living building materials. Sci. Eng. Compos. Mater. 2021, 28, 223–236. [Google Scholar] [CrossRef]
- Birch, E.; Bridgens, B.; Zhang, M.; Dade-Robertson, M. Bacterial Spore-Based Hygromorphs: A Novel Active Material with Potential for Architectural Applications. Sustainability 2021, 13, 4030. [Google Scholar] [CrossRef]
- Gao, S.; Tang, G.; Hua, D.; Xiong, R.; Han, J.; Jiang, S.; Zhang, Q.; Huang, C. Stimuli-responsive bio-based polymeric systems and their application. J. Mater. Chem. B 2019, 7, 709. [Google Scholar] [CrossRef]
- Krieg, O.D.; Christian, Z.; Correa, D.; Menges, A.; Reichert, S.; Rinderspacher, K.; Schwinn, T. Hygroskin: Meteorosensitive Pavilion. In Proceedings of the Fabricate 2014 Conference Zurich, Zurich, Switzerland, 12–14 February 2014; UCL Press: London, UK, 2014; pp. 272–279. [Google Scholar]
- Taveres-Cachata, E.; Grynninga, S.; Thomsena, J.; Selkowitz, S. Responsive building envelope concepts in zero emission neighborhoods and T smart cities—A roadmap to implementation. Build. Environ. 2019, 149, 446–457. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khosromanesh, R. Towards Refining Bio-Inspired Hydro-Actuated Building Facades by Emphasising the Importance of Hybrid Adaptability. Sustainability 2024, 16, 959. https://doi.org/10.3390/su16030959
Khosromanesh R. Towards Refining Bio-Inspired Hydro-Actuated Building Facades by Emphasising the Importance of Hybrid Adaptability. Sustainability. 2024; 16(3):959. https://doi.org/10.3390/su16030959
Chicago/Turabian StyleKhosromanesh, Raheleh. 2024. "Towards Refining Bio-Inspired Hydro-Actuated Building Facades by Emphasising the Importance of Hybrid Adaptability" Sustainability 16, no. 3: 959. https://doi.org/10.3390/su16030959
APA StyleKhosromanesh, R. (2024). Towards Refining Bio-Inspired Hydro-Actuated Building Facades by Emphasising the Importance of Hybrid Adaptability. Sustainability, 16(3), 959. https://doi.org/10.3390/su16030959