
Enhancing Traffic Efficiency and Sustainability through Strategic Placement of Roadside Units and Variable Speed Limits in a Connected Vehicle Environment

 , ,
, , 
Abstract
1. Introduction
- How do the traffic efficiency and environmental impacts evolve according to the dissemination technology: C-ITS service versus variable message sign?
- What is the impact of the market penetration rate of C-ITS services?
- What is the impact of RSU coverage in disseminating speed limit instructions to the connected drivers?
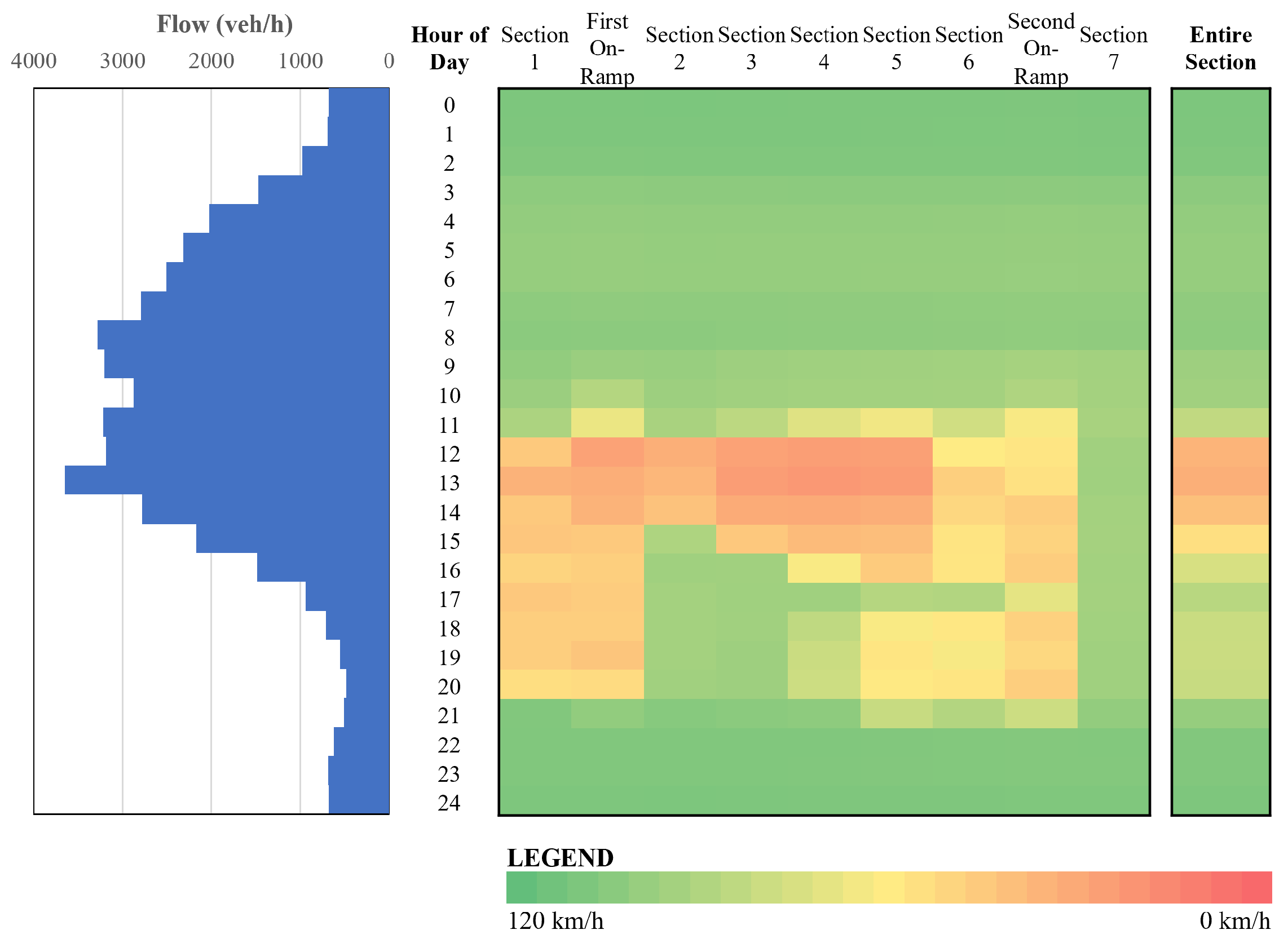
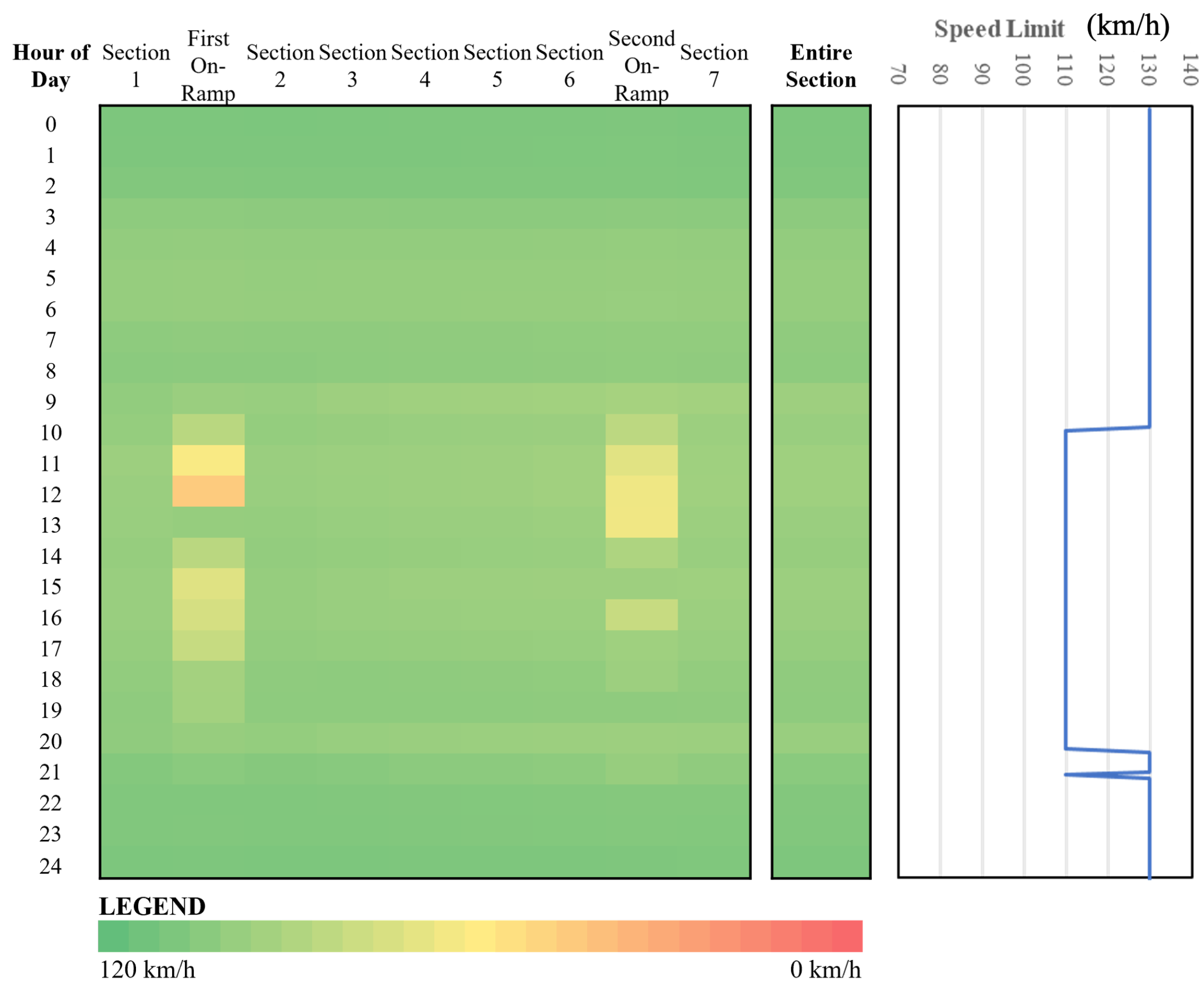
- The average speed by road section and time period: This enables characterizing the impact on the global flow and highlighting the effect of the C-ITS service when the penetration rates vary. It is captured by intrusive sensors, such as loop sensors;
- The pollutant emissions indicators, and emissions, which could be directly measured on equipped vehicles or assessed by simulation tools.
2. Methodology
- (a)
- Baseline, i.e., without the application of any variable speed limit (VSL);
- (b)
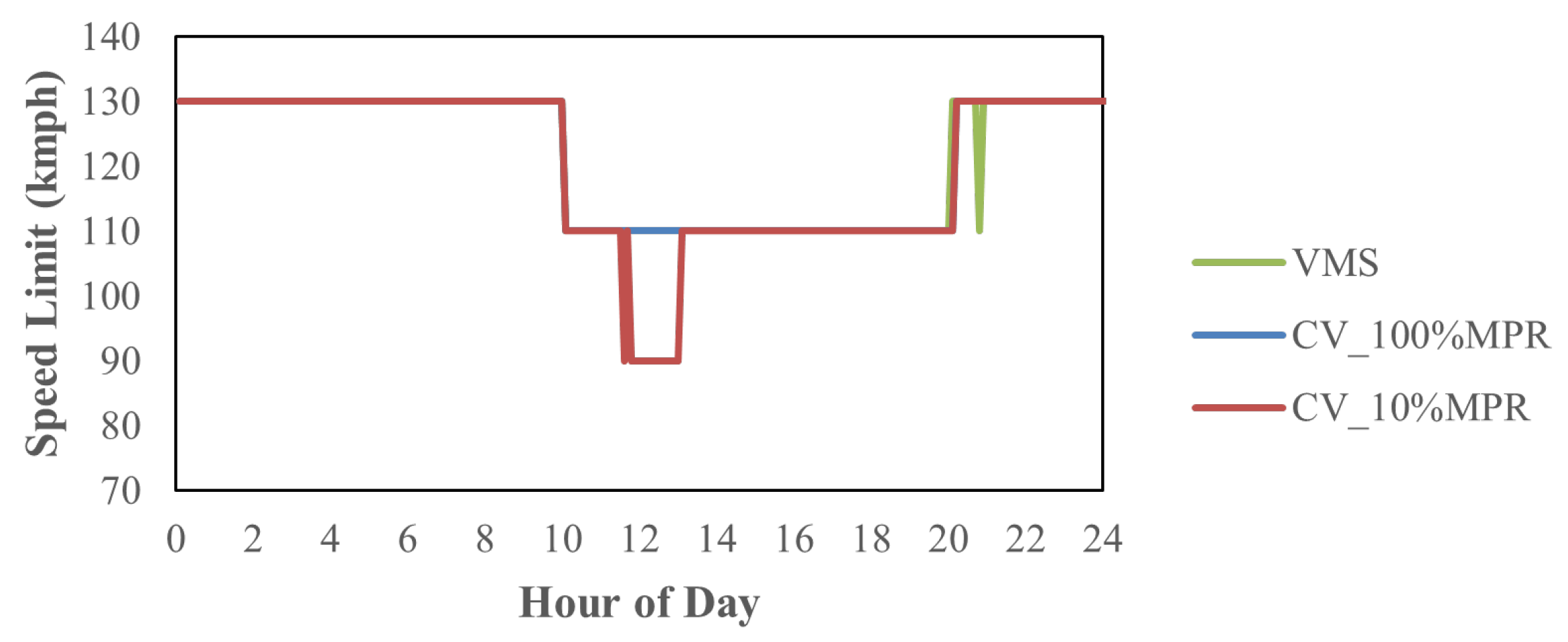
- Application of the VSL to all vehicles using variable message signs (VMSs);
- (c)
- Application of the VSL only to connected vehicles using in-vehicle signage (IVS).
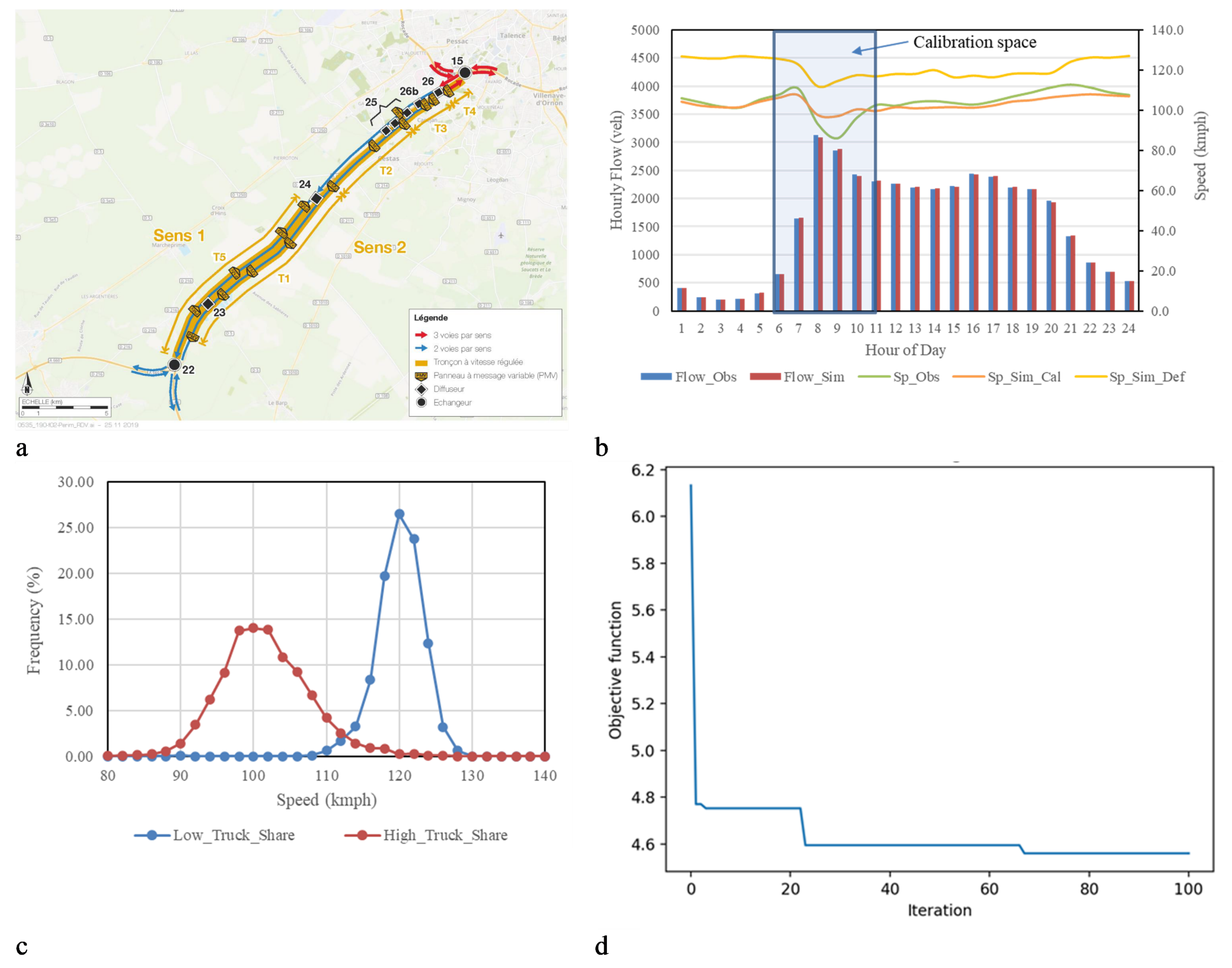
2.1. Calibration for a Highway Environment
- Number of iterations: 100;
- Population size: 50;
- Selection procedure: Tournament selection;
- Crossover probability: 0.5 (uniform crossover);
- Mutation probability: 0.1 (Random mutation).
2.2. Validation for VSL Application
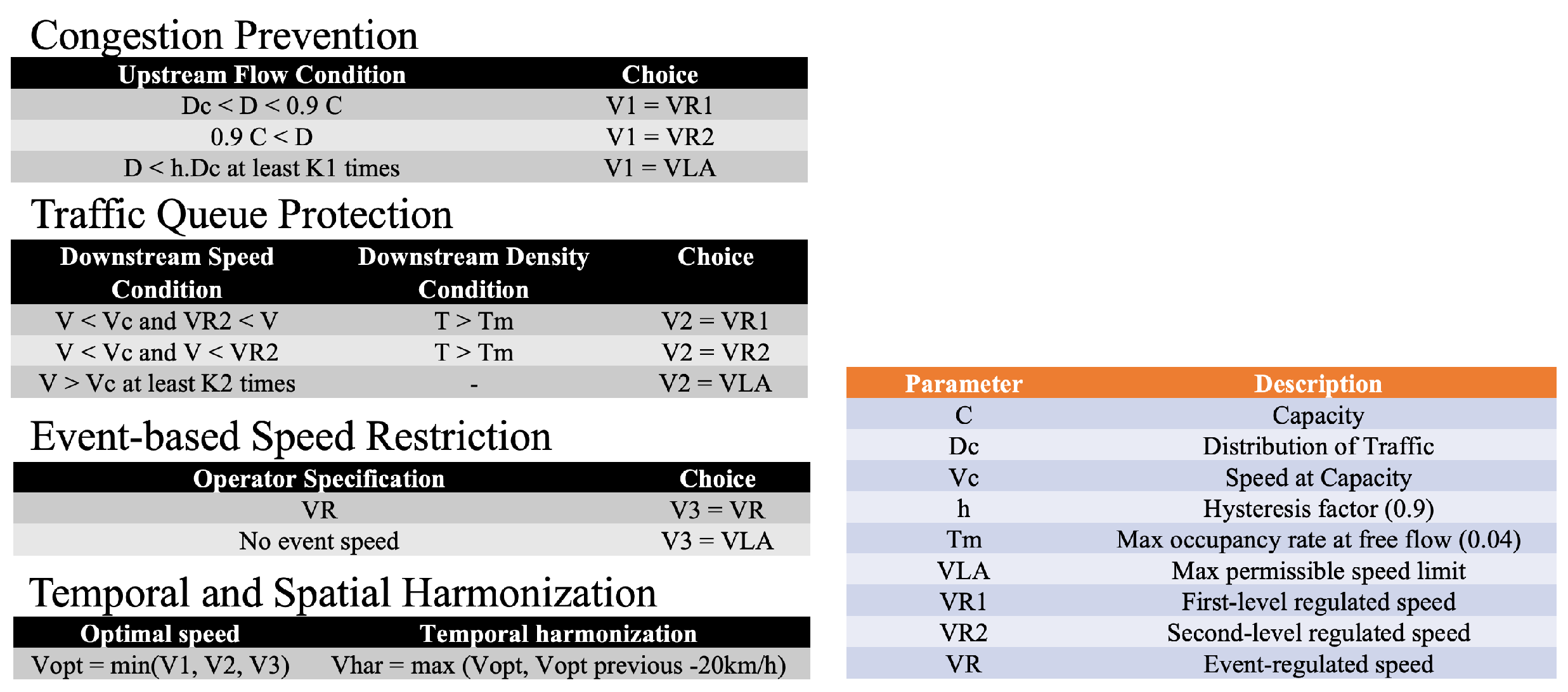
- Congestion prevention: The congestion prevention algorithm uses the upstream loop sensor data to regulate the flow rate by reducing speed.
- Traffic queue protection: The traffic queue protection algorithm uses the downstream loop sensor data to assess the downstream speed and reduce the speed upstream, if necessary.
- Event-based speed restriction: An “event” speed can be specified by the operator for each section. This speed is then the maximum speed that can be proposed by the system for this section, the spatial harmonization remaining applicable. The following are the cases of use of this feature: (a) the presence of an accident requiring a speed reduction upstream; (b) a construction site in an area requiring a temporary reduction of the authorized speed limit.
- Temporal and spatial harmonization: The optimal speed for a section is the minimum speed among the recommended speeds V1, V2, and V3 for the different elementary algorithms. The decrease of the regulated speed on a section can only be a maximum of −20 kmph. This constraint is called temporal harmonization. Also, the reduction of the regulated speed on successive sections in the direction of traffic can only be a maximum of −20 kmph. This constraint is called spatial harmonization.
2.3. Design of the Experiment
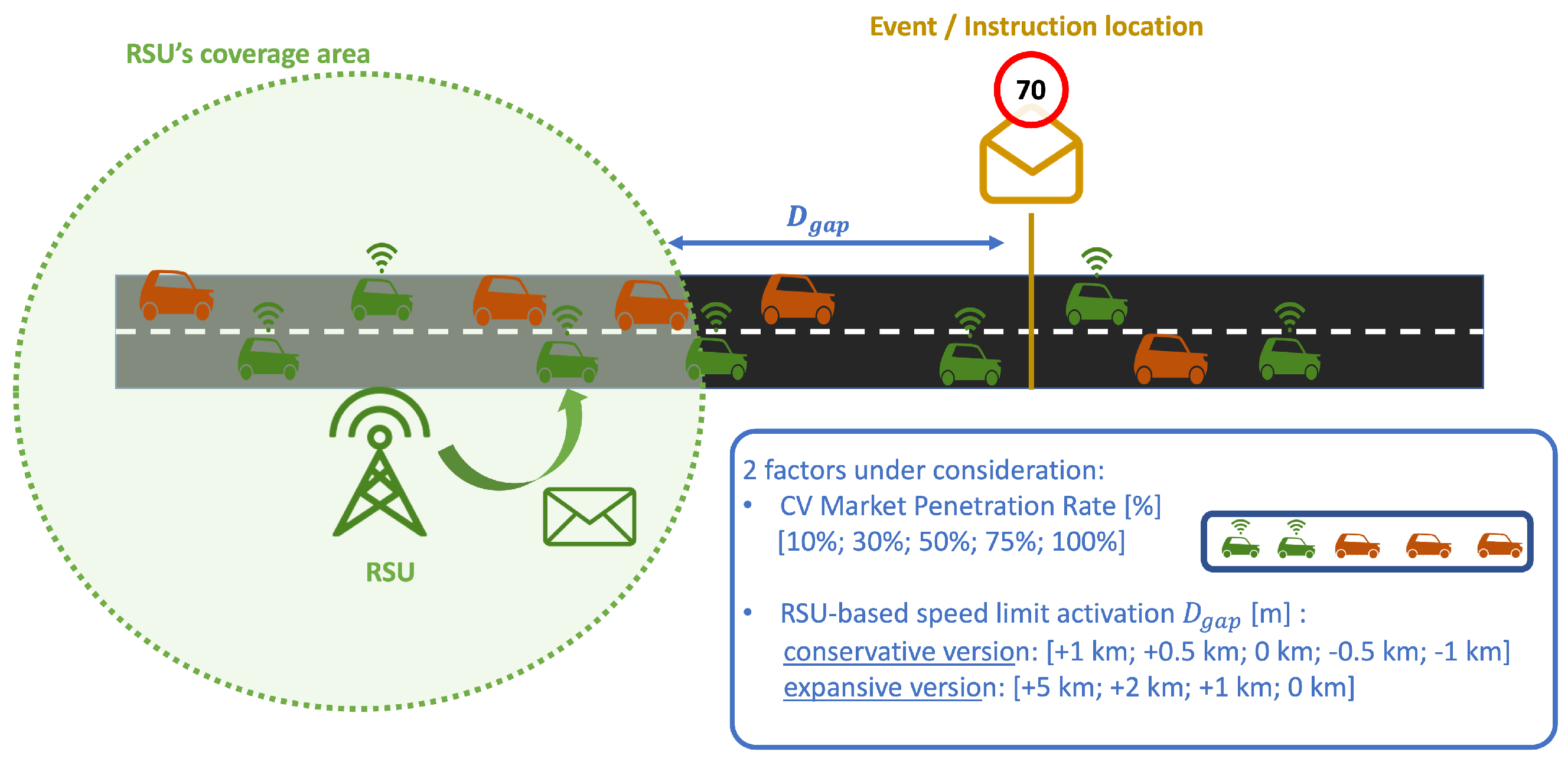
- Market penetration rate of connected vehicles;
- Distance gap between the effective location to apply the instruction (event location) and the coverage of the RSU, featuring its border. A distance gap of 500 m upstream means that the RSU coverage area ended 500 m upstream of the event to report and warn the connected vehicle users. The underlying objective of this factor is to highlight the impact of gaps or discontinuities in the road network coverage by the RSUs. With the existence of , two possible configurations can be assumed:
- –
- Conservative broadcast process for RSU: This assumes that the only C-ITS instructions that an RSU can broadcast are the ones about an event located within the range of the RSU’s coverage area [37]. Consequently, when gaps occur in the coverage of the road network, some messages cannot be delivered at the exact and expected location, but only upstream or downstream. This results in spatial inaccuracies to apply management strategies. The delivery location of the message is based on the coverage of the RSU such that the speed limit information is provided exactly at the same location as where the VMS is presently operational or at different locations upstream or downstream of the VMS.
- –
- Expansive broadcast process for the RSU: This assumes that an RSU can broadcast a C-ITS instruction about any event located downstream of its coverage area. As a consequence, the RSU delivers the last up-to-date message to the connected drivers, when it leaves the RSU’s coverage area, but some changes in the message (activation of the speed limit, etc.) might occur in the meantime. Then, some temporal delays could be expected and observed while implementing the C-ITS instructions. In this context, it is assumed that RSUs can deliver messages about events out of the range of their own coverage area. Due to spatial gaps between the RSUs’ coverage areas, some delays or obsolete information might occur. For instance, with an RSU is located upstream of the effective location of the VMS and the event, the last updated message delivered by the RSU at the border of the RSU’s coverage area might be outdated, when the vehicle reaches the event. This might result in a connected vehicle not applying the current and effective instruction (or, less likely, applying an obsolete instruction, if the message does not have an expiry date).
- CV market penetration rate: 10%, 30%, 50%, 75%, and 100%.
- Distance gap :
- –
- Conservative version: RSU-based speed limit activation: 0 km, 0.5 km upstream, 1.0 km upstream, 0.5 km downstream, and 1 km downstream of the presently located VMS.
- –
- Expansive version: RSU-based speed limit activation: +5 km, +2 km, +1 km, and 0 km.
3. Experimentation Results and Analysis
4. Conclusions
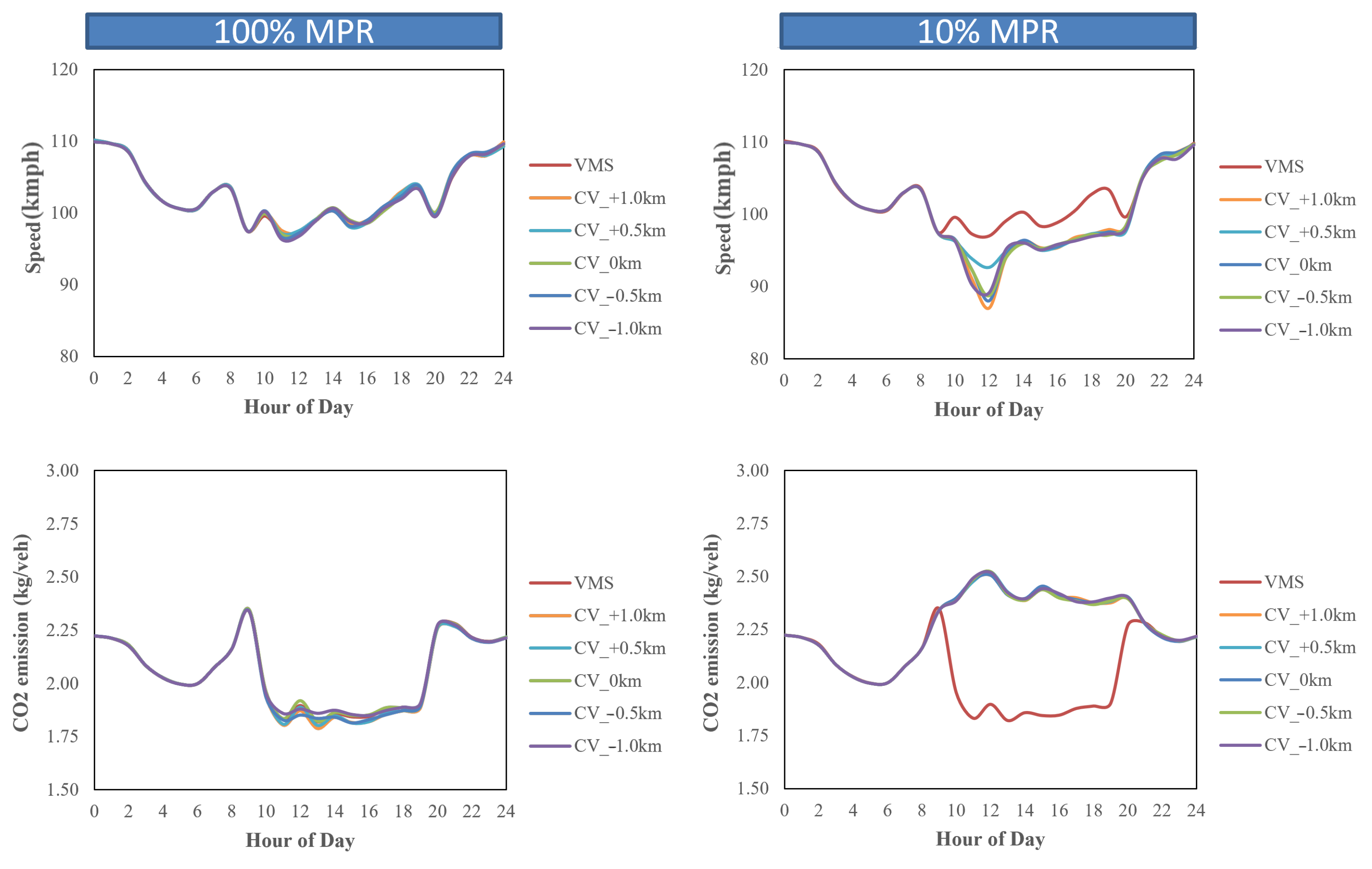
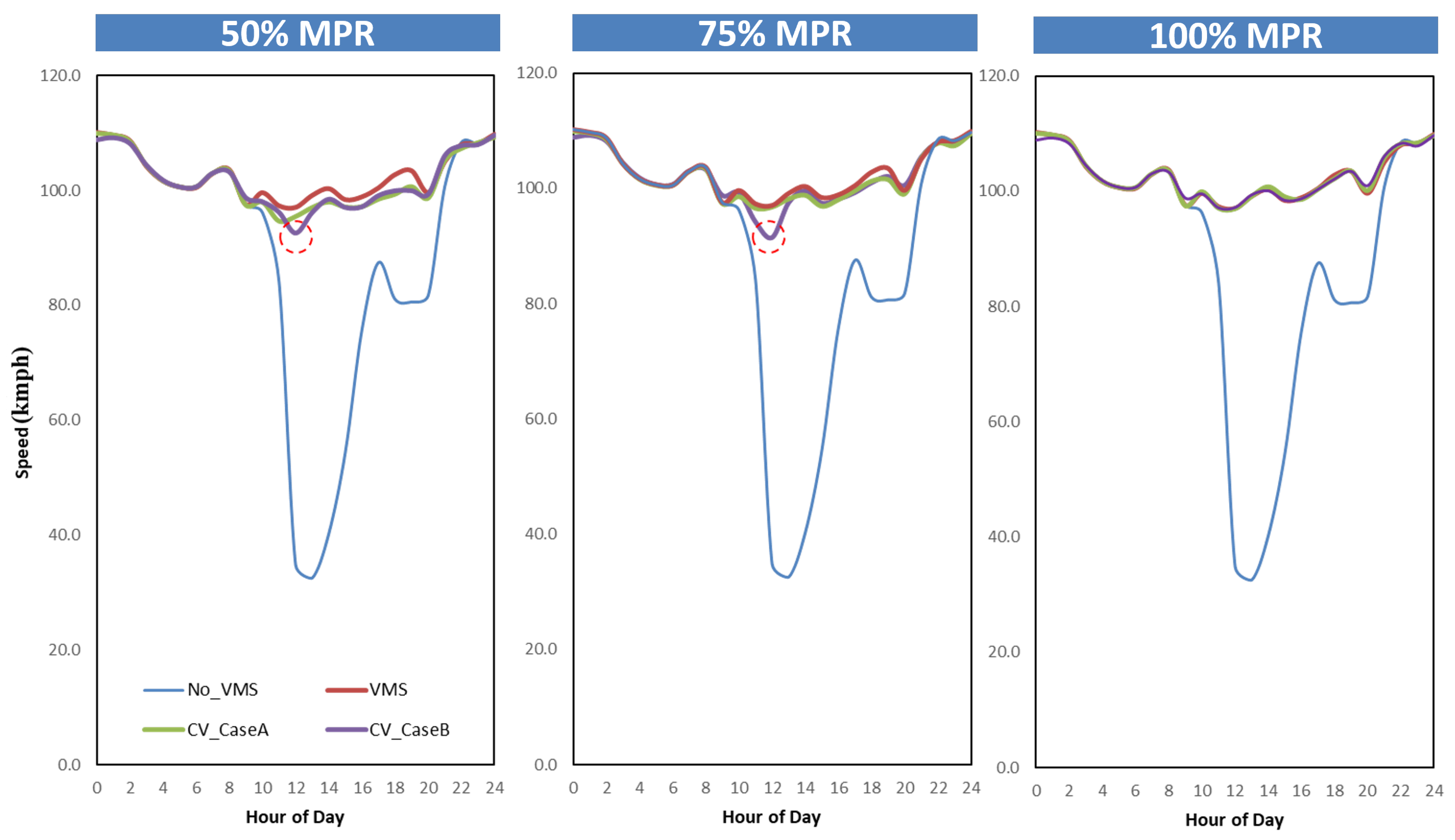
- Impact on traffic efficiency: Using in-vehicle signage to provide variable speed limit instructions shows considerable promise in terms of traffic efficiency even at a low market penetration rate of CVs. For example, as compared to a scenario with no VSL, the average traffic stream speed is improved by about 25 kmph during the peak periods of operation at a 10% market penetration rate (MPR) and about 30 kmph at market penetration rates of 75% or higher (see Figure 12). The average traffic stream speed improves till an MPR of 50% and then remains similar for higher market penetration rates of CVs.
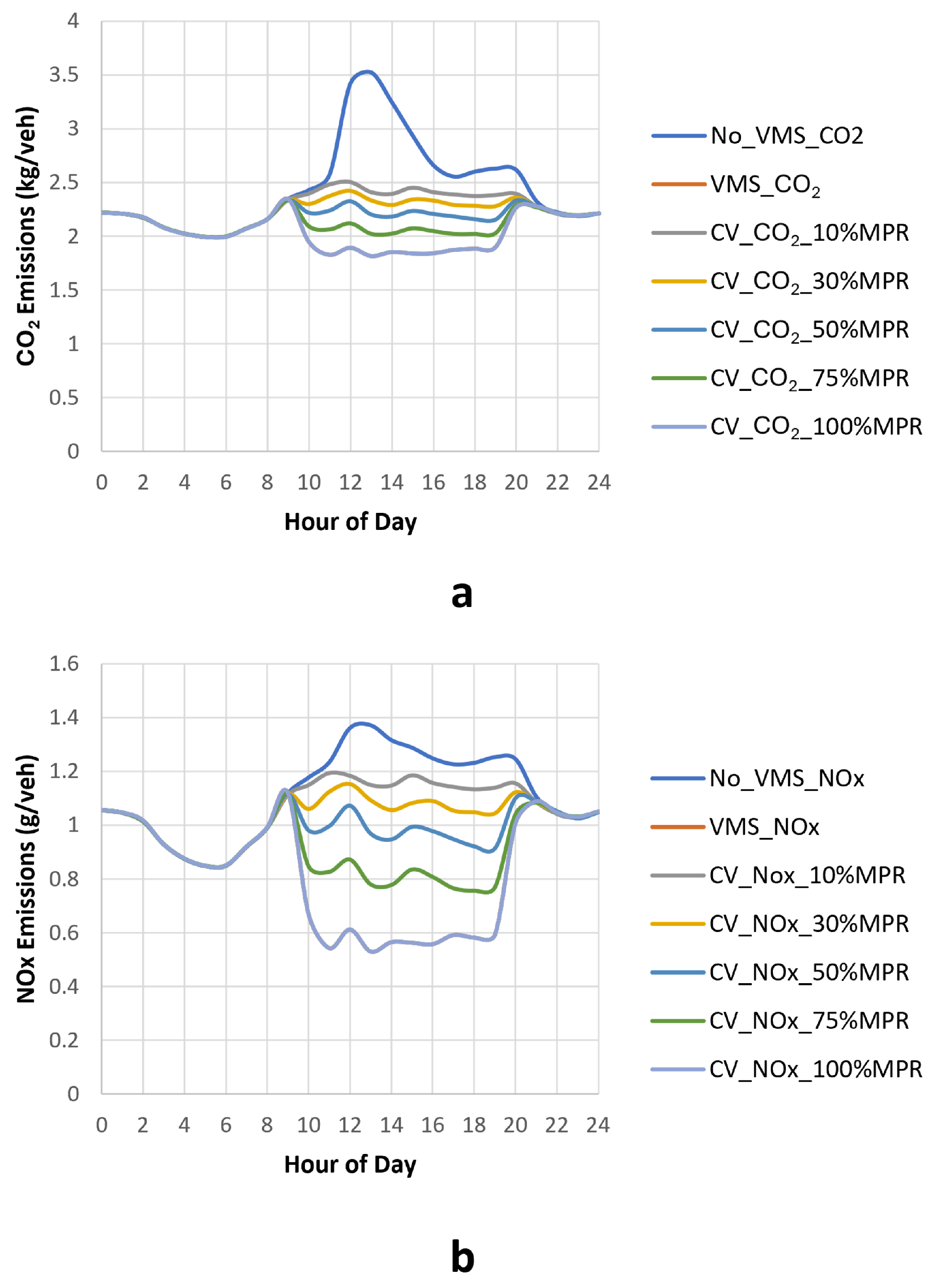
- Impact on environmental efficiency: While there are some environmental benefits at a low MPR of CVs, the effectiveness in terms of environmental efficiency improves significantly with an increased MPR of CVs. Contrary to the traffic stream speed, the emissions are visibly reduced with each level of increase in the MPR (see Figure 11). The increase in emissions at a low MPR is primarily due to the speed oscillations of the unequipped vehicles at a microscopic level.
- Operation based on market penetration rate of CVs: Based on the results, it may be recommended to maintain speed limit instructions through operational variable message signs till a minimum CV market penetration of 30% is achieved in order to achieve meaningful impacts. The findings suggest that CVs might positively impact the traffic stream performance substantially when their MPR is more than 30%, and the impacts may remain similar even if VMSs are removed.
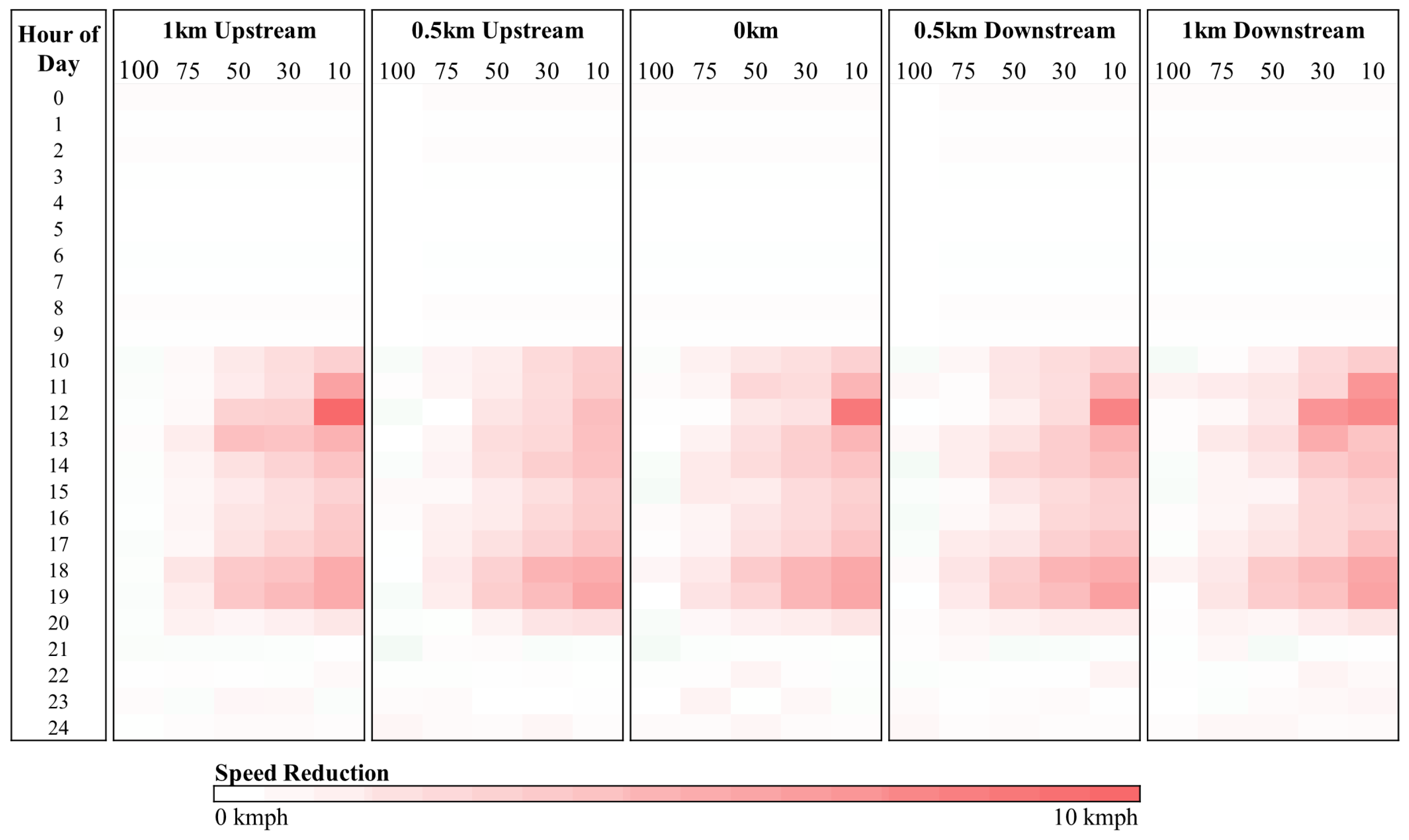
- Distance gap from event location: Providing speed instructions upstream of the event location appears to be more effective than providing the same downstream when full coverage of the Roadside Units (RSUs) cannot be achieved along the motorway. This may be due to the difficulties coping with a late speed instruction transmission, especially when the variable message sign is close to the on-ramp congestion. However, providing the same instruction further upstream of the event location reduces effectiveness at a low MPR. If the activation area is more than 500 m upstream, it gives unequipped vehicles the opportunity to overtake CVs, especially at lower market penetration rates of CVs, which makes it less effective.
- Message notification configuration: The expansive broadcast strategy appears to be more effective than the conservative one for a large distance gap to the event position (upper than 1 km).
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Smulders, S. Control by variable speed signs: The Dutch experiment. In Proceedings of the International Conference on Road Traffic Monitoring and Control (6th: 1992: London, England), London, UK, 28–30 April 1992. [Google Scholar]
- Smulders, S.; Helleman, D. Variable Speed Control: State-of-the-Art and Synthesis. In Proceedings of the 9th International Conference on Road Transport Information and Control, London, UK, 21–23 April 1998. [Google Scholar]
- Khondaker, B.; Kattan, L. Variable Speed Limit: An Overview. Transp. Lett. 2015, 7, 264–278. [Google Scholar] [CrossRef]
- Hegyi, A.; Hoogendoorn, S.; Schreuder, M.; Stoelhorst, H.; Viti, F. SPECIALIST: A dynamic speed limit control algorithm based on shock wave theory. In Proceedings of the 2008 11th International IEEE Conference on Intelligent Transportation Systems, Beijing, China, 12–15 October 2008; pp. 827–832. [Google Scholar]
- Kattan, L.; Khondaker, B.; Derushkina, O.; Poosarla, E. A Probe-Based Variable Speed Limit System. J. Intell. Transp. Syst. 2015, 19, 339–354. [Google Scholar] [CrossRef]
- Kušić, K.; Dusparic, I.; Guériau, M.; Gregurić, M.; Ivanjko, E. Extended Variable Speed Limit control using Multi-agent Reinforcement Learning. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–8. [Google Scholar]
- Kušić, K.; Ivanjko, E.; Gregurić, M.; Miletić, M. An Overview of Reinforcement Learning Methods for Variable Speed Limit Control. Appl. Sci. 2020, 10, 4917. [Google Scholar] [CrossRef]
- Wang, M.; Daamen, W.; Hoogendoorn, S.P.; van Arem, B. Connected variable speed limits control and car-following control with vehicle-infrastructure communication to resolve stop-and-go waves. J. Intell. Transp. Syst. 2016, 20, 559–572. [Google Scholar] [CrossRef]
- Grumert, E.F.; Tapani, A. Bottleneck mitigation through a variable speed limit system using connected vehicles. Transp. A Transp. Sci. 2020, 16, 213–233. [Google Scholar] [CrossRef]
- Fang, X.; Péter, T.; Tettamanti, T. Variable Speed Limit Control for the Motorway–Urban Merging Bottlenecks Using Multi-Agent Reinforcement Learning. Sustainability 2023, 15, 1464. [Google Scholar] [CrossRef]
- Yang, J.; Wang, P.; Ju, Y. Variable Speed Limit Intelligent Decision-Making Control Strategy Based on Deep Reinforcement Learning under Emergencies. Sustainability 2024, 16, 965. [Google Scholar] [CrossRef]
- Yang, P.; Ma, M.; Wu, C. Ecologically Oriented Freeway Control Methods Integrated Speed Limits and Ramp Toll Booths Layout. Sustainability 2024, 16, 4404. [Google Scholar] [CrossRef]
- Vrbanić, F.; Miletić, M.; Tišljarić, L.; Ivanjko, E. Influence of Variable Speed Limit Control on Fuel and Electric Energy Consumption, and Exhaust Gas Emissions in Mixed Traffic Flows. Sustainability 2022, 14, 932. [Google Scholar] [CrossRef]
- Grumert, E.; Tapani, A. Using connected vehicles in a variable speed limit system. Transp. Res. Procedia 2017, 27, 85–92. [Google Scholar] [CrossRef]
- Chen, A.; Khorashadi, B.; Chuah, C.N.; Ghosal, D.; Zhang, M. Smoothing vehicular traffic flow using vehicular-based ad hoc networking & computing grid (VGrid). In Proceedings of the 2006 IEEE Intelligent Transportation Systems Conference, Toronto, ON, Canada, 17–20 September 2006; pp. 349–354. [Google Scholar]
- Belanovic, P.; Valerio, D.; Paier, A.; Zemen, T.; Ricciato, F.; Mecklenbrauker, C.F. On Wireless Links for Vehicle-to-Infrastructure Communications. IEEE Trans. Veh. Technol. 2010, 59, 269–282. [Google Scholar] [CrossRef]
- Pollicino, F.; Stabili, D.; Marchetti, M. On the effectiveness of BSM communications in V2V emergency scenarios. In Proceedings of the 2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring), Helsinki, Finland, 19–22 June 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Kanthavel, D.; Sangeetha, S.; Keerthana, K. An empirical study of vehicle to infrastructure communications—An intense learning of smart infrastructure for safety and mobility. Int. J. Intell. Netw. 2021, 2, 77–82. [Google Scholar] [CrossRef]
- Shin, Y.; Choi, H.; Nam, Y.; Lee, E. Video Packet Distribution Scheme for Multimedia Streaming Services in VANETs. Sensors 2021, 21, 7368. [Google Scholar] [CrossRef] [PubMed]
- Shin, Y.; Choi, H.S.; Nam, Y.; Cho, H.; Lee, E. Particle Swarm Optimization Video Streaming Service in Vehicular Ad-Hoc Networks. IEEE Access 2022, 10, 102710–102723. [Google Scholar] [CrossRef]
- Bijalwan, A.; Hussain, I.; Purohit, K.C.; Kumar, M.A. Enhanced Ant Colony Optimization for Vehicular Ad Hoc Networks Using Fittest Node Clustering. Sustainability 2023, 15, 5903. [Google Scholar] [CrossRef]
- Joshua, C.J.; Jayachandran, P.; Md, A.Q.; Sivaraman, A.K.; Tee, K.F. Clustering, Routing, Scheduling, and Challenges in Bio-Inspired Parameter Tuning of Vehicular Ad Hoc Networks for Environmental Sustainability. Sustainability 2023, 15, 4767. [Google Scholar] [CrossRef]
- Du, J.; Ahn, K.; Farag, M.; Rakha, H. Environmental and Safety Impacts of Vehicle-to-Everything Enabled Applications: A Review of State-of-the-Art Studies. arXiv 2021, arXiv:2202.01675. [Google Scholar]
- Lozano Domínguez, J.M.; Mateo Sanguino, T.J. Review on V2X, I2X, and P2X Communications and Their Applications: A Comprehensive Analysis over Time. Sensors 2019, 19, 2756. [Google Scholar] [CrossRef]
- Fauchet, E.; Laharotte, P.A.; Bhattacharyya, K.; El Faouzi, N.E. Sensitivity Analysis of Lagrangian-Based Variable Speed Limit Strategies apropos of Market Penetration and Spatial Distribution of Connected Vehicles. In Proceedings of the 102nd Annual Meeting of the Transportation Research Board, Washington, DC, USA, 8–12 January 2023. [Google Scholar]
- Sharma, A.; Zheng, Z.; Kim, J.; Bhaskar, A.; Haque, M.M. Assessing traffic disturbance, efficiency, and safety of the mixed traffic flow of connected vehicles and traditional vehicles by considering human factors. Transp. Res. Part C Emerg. Technol. 2021, 124, 102934. [Google Scholar] [CrossRef]
- Lopez, P.A.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flötteröd, Y.P.; Hilbrich, R.; Lücken, L.; Rummel, J.; Wagner, P.; Wießner, E. Microscopic traffic simulation using sumo. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2575–2582. [Google Scholar]
- Park, B.; Schneeberger, J. Microscopic simulation model calibration and validation: Case study of VISSIM simulation model for a coordinated actuated signal system. Transp. Res. Rec. 2003, 1856, 185–192. [Google Scholar] [CrossRef]
- Park, B.; Qi, H. Microscopic simulation model calibration and validation for freeway work zone network-a case study of VISSIM. In Proceedings of the 2006 IEEE Intelligent Transportation Systems Conference, Toronto, ON, Canada, 17–20 September 2006; pp. 1471–1476. [Google Scholar]
- Pourabdollah, M.; Bjärkvik, E.; Fürer, F.; Lindenberg, B.; Burgdorf, K. Calibration and evaluation of car following models using real-world driving data. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–6. [Google Scholar]
- Bhattacharyya, K.; Maitra, B.; Boltze, M. Calibration of micro-simulation model parameters for heterogeneous traffic using mode-specific performance measure. Transp. Res. Rec. 2020, 2674, 135–147. [Google Scholar] [CrossRef]
- Krajzewicz, D.; Behrisch, M.; Wagner, P.; Luz, R.; Krumnow, M. Second generation of pollutant emission models for SUMO. In Proceedings of the Modeling Mobility with Open Data: 2nd SUMO Conference 2014, Berlin, Germany, 15–16 May 2014; Springer: Berlin/Heidelberg, Germany, 2015; pp. 203–221. [Google Scholar]
- Duret, A. Expérimentation d’une Régulation Dynamique des Vitesses sur A31 Méthodes D’élaboration des Algorithmes de Régulation; CETE de Lyon, PCI Régulation Dyamique des Réseaux de Transports: Lyon, France, 2013. [Google Scholar]
- Duret, A. A Multi-lane Capacity Model Designed for Variable Speed Limit Applications. Traffic Manag. 2016, 3, 183–201. [Google Scholar]
- Alison, S. Conception de Panneaux de Signalisation Qui Répondent aux Besoins et Préférences du Consommateur. Available online: https://www2.gnb.ca/content/dam/gnb/Departments/trans/pdf/fr/routeautoroute/Signalisationcommerciale/FormattedSign_Templates_Specifications-f.pdf (accessed on 2 June 2024).
- Bhattacharyya, K.; Laharotte, P.A.; Burianne, A.; El Faouzi, N.E. Assessing Connected Vehicle’s Response to Green Light Optimal Speed Advisory From Field Operational Test and Scaling Up. IEEE Trans. Intell. Transp. Syst. 2022, 24, 6725–6736. [Google Scholar] [CrossRef]
- Xue, L.; Yang, Y.; Dong, D. Roadside infrastructure planning scheme for the urban vehicular networks. Transp. Res. Procedia 2017, 25, 1380–1396. [Google Scholar] [CrossRef]
- Zhou, H.; Zhao, H.; Feng, Q.; Yin, Z.; Li, J.; Qin, K.; Li, M.; Cao, L. Effects of Environmental Parameters on Real-World Nox Emissions and Fuel Consumption for Heavy-Duty Diesel Trucks Using an OBD Approach; Technical Report, SAE Technical Paper; SAE: Warrendale, PA, USA, 2018. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Default Value | Calibrated Value | ||
|---|---|---|---|---|
| Car | Truck | Car | Truck | |
| maxSpeed (m/s) | 36.11 | 36.11 | 32.2 | 26.4 |
| minGap (m) | 2.5 | 2.5 | 2.4 | 3.15 |
| accel (m/s2) | 2.6 | 1.3 | 2.5 | 1.3 |
| decel (m/s2) | 4.5 | 4 | 4.65 | 4 |
| sigma | 0.5 | 0.5 | 0.7 | 0.75 |
| tau (s) | 1 | 1 | 1.3 | 1.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bhattacharyya, K.; Laharotte, P.-A.; Fauchet, E.; Blache, H.; El Faouzi, N.-E. Enhancing Traffic Efficiency and Sustainability through Strategic Placement of Roadside Units and Variable Speed Limits in a Connected Vehicle Environment. Sustainability 2024, 16, 7495. https://doi.org/10.3390/su16177495
Bhattacharyya K, Laharotte P-A, Fauchet E, Blache H, El Faouzi N-E. Enhancing Traffic Efficiency and Sustainability through Strategic Placement of Roadside Units and Variable Speed Limits in a Connected Vehicle Environment. Sustainability. 2024; 16(17):7495. https://doi.org/10.3390/su16177495
Chicago/Turabian StyleBhattacharyya, Kinjal, Pierre-Antoine Laharotte, Eleonore Fauchet, Hugues Blache, and Nour-Eddin El Faouzi. 2024. "Enhancing Traffic Efficiency and Sustainability through Strategic Placement of Roadside Units and Variable Speed Limits in a Connected Vehicle Environment" Sustainability 16, no. 17: 7495. https://doi.org/10.3390/su16177495
APA StyleBhattacharyya, K., Laharotte, P.-A., Fauchet, E., Blache, H., & El Faouzi, N.-E. (2024). Enhancing Traffic Efficiency and Sustainability through Strategic Placement of Roadside Units and Variable Speed Limits in a Connected Vehicle Environment. Sustainability, 16(17), 7495. https://doi.org/10.3390/su16177495