

Flume Experiments and Numerical Simulation of a Barge Collision with a Bridge Pier Based on Fluid–Structure Interaction

Abstract
1. Introduction
2. Collision Experiments in Flume
2.1. Experiment Model and Devices
2.2. FE Simulation
2.3. Comparison and Verification
3. Simulation of Barge–Pier Collision
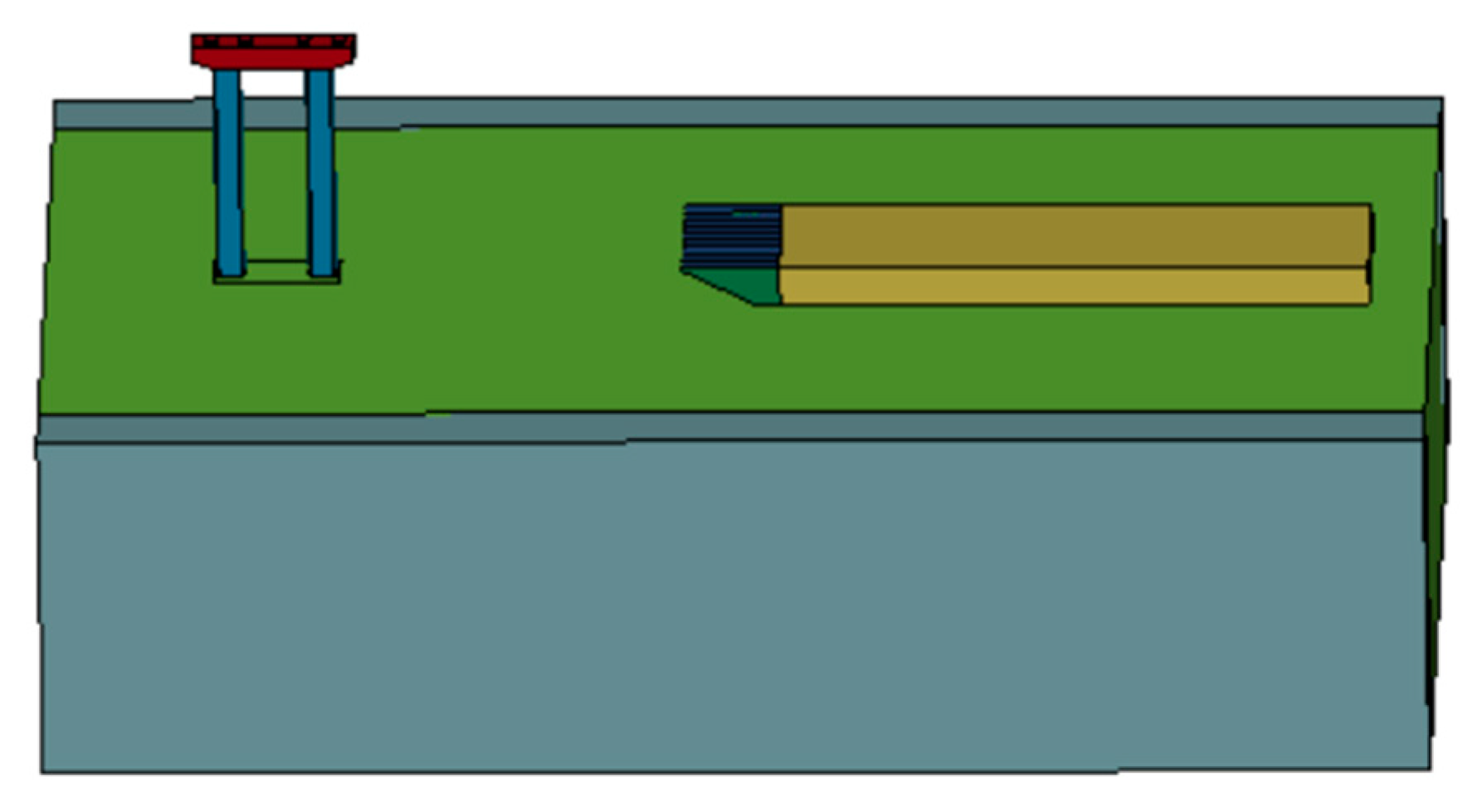
3.1. Barge–Pier Collision Model
3.2. Collision Results with Different Barge Masses
3.3. Collision Results with Different Barge Speeds
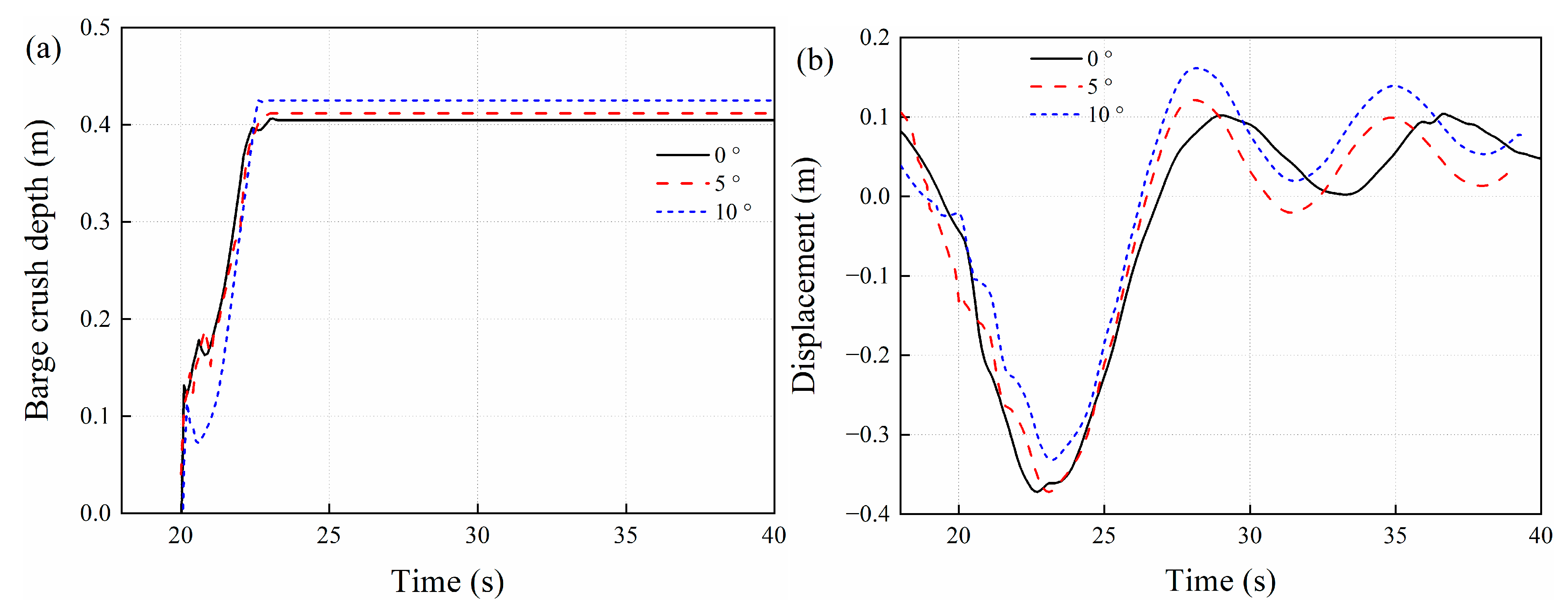
3.4. Collision Results with Different Barge Angles
3.5. Collision Results with Different Collision Locations
4. Comparative Analysis of FSI and Added-Mass Methods
- Before the collision, the barge is moving in the same direction as the water;
- Upon collision, the barge comes to rest and then goes into reverse;
- The water then propels the barge forward to collide with the pier again.
5. Conclusions
- (1)
- With relative errors in the peak force of less than 10%, the simulation results and the experiment for sphere–cylinder collisions in the water flume were very consistent. This demonstrated that it was practical and logical to model a sphere colliding with a cylinder using the ALE approach and that this model could be expanded to model a barge–pier collision at a larger size.
- (2)
- The barge mass and speed considerably affect the dynamic response of the barge–pier collision, according to the general conclusions drawn from the barge–pier crash simulations performed using the FSI method. In contrast, the collision’s angle and position have negligible impacts. With increasing barge mass and speed, all peak values of impact forces, barge crush depth, and pier displacement significantly rose in contrast to fluctuating displacement with different speeds; with increasing collision angle and location offset, peak impact forces substantially dropped, while other index values were only marginally altered in comparison to growing depth with different collision sites.
- (3)
- The first collision’s maximum impact force could be replicated using the FSI and AM approaches. The FSI approach, in contrast to the CAM method, could replicate the collision phenomenon where (i) the barge moved in the same direction as the water prior to the collision, (ii) stopped after the impact and then reversed, and (iii) the water then forced the barge forward to crash with the pier again. As a result, the FSI approach is a useful tool for modeling barge–pier collisions.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Length of experimental specimen | |
| Time of experimental specimen | |
| Mass of experimental specimen | |
| Gravitational acceleration | |
| Acceleration | |
| Prototype | |
| Model | |
| Parameters of gas pressure | |
| Ratio of specific heats | |
| Ratio of current density to reference density minus 1 | |
| Current density, reference density | |
| Initial internal energy | |
| The intercept of the velocity curve (in velocity units) | |
| Unitless coefficients of the slope of the velocity curve | |
| Unitless Gruneisen gamma | |
| The unitless, first order volume correction to | |
| Test value | |
| Simulation value | |
| Relative error | |
| Impact composite force in simulation | |
| Ft | Impact composite force in experiment |
| Length of barge | |
| Width of barge | |
| Bow rake length | |
| Depth of bow | |
| Depth of barge | |
| Head log height | |
| E | Young’s modulus |
| Poisson’s ratio | |
| Yield stress | |
| Parameters fitting for the Cowper–Symonds equation | |
| Parameters fitting for the Cowper–Symonds equation | |
| Strain rate | |
| FRA_RF | Fraction of reinforcement in section. |
| FE | Finite element |
| FSI | Fluid–structure interaction |
| ALE | Arbitrary Lagrangian–Eulerian |
| CAM | Constant added mass |
| PMMA | Polymethyl methacrylate |
| ADV | Acoustic doppler velocimetry |
| CASTS | *CONTACT_AUTOMATIC_SURFACE_TO_SURFACE |
References
- Abdelkarim, O.I.; ElGawady, M.A. Performance of bridge piers under vehicle collision. Eng. Struct. 2017, 140, 337–352. [Google Scholar] [CrossRef]
- Lee, G.C.; Mohan, S.; Huang, C.; Fard, B.N. A Study of US Bridge Failures (1980–2012); MCEER: Buffalo, NY, USA, 2013. [Google Scholar]
- Knott, M.A. Vessel collision design codes and experience in the United States. In Ship Collision Analysis; Routledge: London, UK, 2017; pp. 75–84. [Google Scholar]
- Knott, M.; Winters, M. Ship and barge collisions with bridges over navigable waterways. In Proceedings of the 34th PIANC World Congress, Panama City, Panama, 7–12 May 2018; pp. 1–16. [Google Scholar]
- Gluver, H. Ship Collision Analysis. In Proceedings of the International Symposium on Advances in Ship Collision Analysis, Copenhagen, Denmark, 10–13 May 1998; Routledge: London, UK, 2017. [Google Scholar]
- Sang, J.K.; Krgersaar, M.; Ahmadi, N.; Hirdaris, S. The influence of fluid structure interaction modelling on the dynamic response of ships subject to collision and grounding. Mar. Struct. 2021, 75, 102875. [Google Scholar]
- Jiang, H.; Wang, J.; Chorzepa, M.G.; Zhao, J. Numerical investigation of progressive collapse of a multispan continuous bridge subjected to vessel collision. J. Bridge Eng. 2017, 22, 04017008. [Google Scholar] [CrossRef]
- Song, Y.; Wang, J. Development of the impact force time-history for determining the responses of bridges subjected to ship collisions. Ocean Eng. 2019, 187, 106182. [Google Scholar] [CrossRef]
- Sha, Y.; Hao, H. Laboratory tests and numerical simulations of barge impact on circular reinforced concrete piers. Eng. Struct. 2013, 46, 593–605. [Google Scholar] [CrossRef]
- Peng, K. Dynamic ship-bridge collision risk decision method based on time-dependent AASHTO model. J. Inst. Eng. Ser. A 2021, 102, 305–313. [Google Scholar] [CrossRef]
- Sha, Y.; Hao, H. Nonlinear finite element analysis of barge collision with a single bridge pier. Eng. Struct. 2012, 41, 63–76. [Google Scholar] [CrossRef]
- Yuan, P.; Harik, I.E. Equivalent barge and flotilla impact forces on bridge piers. J. Bridge Eng. 2010, 15, 523–532. [Google Scholar] [CrossRef]
- AASHTO. Guide Specification and Commentary for Vessel Collision Design of Highway Bridges; American Association of State Highway and Transportation Officials: Washington, DC, USA, 2009. [Google Scholar]
- Jiang, H.; Chorzepa, M.G. Case study: Evaluation of a floating steel fender system for bridge pier protection against vessel collision. J. Bridge Eng. 2016, 21, 05016008. [Google Scholar] [CrossRef]
- Karimnejad, S.; Delouei, A.A.; Başağaoğlu, H.; Nazari, M.; Shahmardan, M.; Falcucci, G.; Lauricella, M.; Succi, S. A Review on Contact and Collision Methods for Multi-body Hydrodynamic problems in Complex Flows. Commun. Comput. Phys. 2022, 32, 899–950. [Google Scholar] [CrossRef]
- Afra, B.; Delouei, A.A.; Mostafavi, M.; Tarokh, A. Fluid-structure interaction for the flexible filament’s propulsion hanging in the free stream. J. Mol. Liq. 2021, 323, 114941. [Google Scholar] [CrossRef]
- Bhalla, A.P.S.; Bale, R.; Griffith, B.E.; Patankar, N.A. A unified mathematical framework and an adaptive numerical method for fluid–structure interaction with rigid, deforming, and elastic bodies. J. Comput. Phys. 2013, 250, 446–476. [Google Scholar] [CrossRef]
- Tao, P. Simulation Analysis and Model Experimental Study on Ship-Bridge Collision Force; Nanjing University of CAEronautics and Astronautics: Nanjing, China, 2012. (In Chinese) [Google Scholar]
- Hong, J.; Wei, K.; Shen, Z.; Xu, B.; Qin, S. Experimental study of breaking wave loads on elevated pile cap with rectangular cross-section. Ocean Eng. 2021, 227, 108878. [Google Scholar] [CrossRef]
- Yang, Q. Numerical Investigations of Scale Effects on Local Scour around a Bridge Pier; Florida State University: Tallahassee, FL, USA, 2005. [Google Scholar]
- Tversky, A. Features of similarity. Psychol. Rev. 1977, 84, 327. [Google Scholar] [CrossRef]
- Ali, U.; Karim, K.J.B.A.; Buang, N.A. A review of the properties and applications of poly (methyl methacrylate)(PMMA). Polym. Rev. 2015, 55, 678–705. [Google Scholar] [CrossRef]
- Lee, M.; Koo, T.; Lee, S.; Min, B.H.; Kim, J.H. Morphology and physical properties of nanocomposites based on poly (methyl methacrylate)/poly (vinylidene fluoride) blends and multiwalled carbon nanotubes. Polym. Compos. 2015, 36, 1195–1204. [Google Scholar] [CrossRef]
- Xu, B.; Wei, K.; Qin, S.; Hong, J. Experimental study of wave loads on elevated pile cap of pile group foundation for sea-crossing bridges. Ocean Eng. 2020, 197, 106896. [Google Scholar] [CrossRef]
- Slavik, T.P. A coupling of empirical explosive blast loads to ALE air domains in LS-DYNA®. IOP Conf. Ser. Mater. Sci. Eng. 2010, 10, 012146. [Google Scholar] [CrossRef]
- Consolazio, G.R.; Cook, R.A.; Biggs, C.A.E.; Cowan, D.R.; Bollmann, H.T. Barge impact testing of the St. George Island causeway bridge. In Phase II: Design of Instrumentation Systems; Bridge Superstructures; Department of Civil and Coastal Engineering, University of Florida: Gainesville, FL, USA, 2003. [Google Scholar]
- Ziong, E.C. Finite Element Simulation Study on Circular Concrete Bridge Piers Subjected to Vehicle Collision; Universiti Teknologi Petronas: Seri Iskandar, Malaysia, 2014. [Google Scholar]
- Zhang, X.; Wang, X.; Chen, W.; Wen, Z.; Li, X. Numerical study of rockfall impact on bridge piers and its effect on the safe operation of high-speed trains. Struct. Infrastruct. Eng. 2020, 17, 1–19. [Google Scholar] [CrossRef]
- Gholipour, G.; Zhang, C.; Li, M. Effects of soil–pile interaction on the response of bridge pier to barge collision using energy distribution method. Struct. Infrastruct. Eng. 2018, 14, 1520–1534. [Google Scholar] [CrossRef]
- Rudan, S.; Ćatipović, I.; Berg, R.; Völkner, S.; Prebeg, P. Numerical study on the consequences of different ship collision modelling techniques. Ships Offshore Struct. 2019, 14, 387–400. [Google Scholar] [CrossRef]
- LSTC. LS-DYNA. In Keyword User’s Manual; Version 971; Livermore Software Technology Corporation: Livermore, CA, USA, 2007. [Google Scholar]
- Abedini, M.; Zhang, C. Performance Assessment of Concrete and Steel Material Models in LS-DYNA for Enhanced Numerical Simulation, A State of the Art Review. Arch. Comput. Method Eng. 2020, 28, 2921–2942. [Google Scholar] [CrossRef]
- Cowper, G.R.; Symonds, P.S. Strain-Hardening and Strain-Rate Effects in the Impact Loading of Cantilever Beams; Brown University: Providence, RI, USA, 1957. [Google Scholar]
- Jones, N. Structural Impact; Cambridge University Press: Cambridge, UK, 2011. [Google Scholar]
- Fan, W.; Xu, X.; Zhang, Z.; Shao, X. Performance and sensitivity analysis of UHPFRC-strengthened bridge columns subjected to vehicle collisions. Eng. Struc. 2018, 173, 251–268. [Google Scholar] [CrossRef]
- Pedersen, P.T.; Chen, J.; Zhu, L. Design of bridges against ship collisions. Mar. Struct. 2020, 74, 102810. [Google Scholar] [CrossRef]
- Förster, C.; Wall, W.A.; Ramm, E. Artificial constant added mass instabilities in sequential staggered coupling of nonlinear structures and incompressible viscous flows. Comput. Method Appl. M 2007, 196, 1278–1293. [Google Scholar] [CrossRef]
- Kantrales, G.C.; Davidson, M.T.; Consolazio, G.R. Influence of Impact-Induced Relative Motion on Effective Barge Flotilla Mass. J. Bridge Eng. 2019, 24, 04019019. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Sphere Mass (kg) | Water Speed (m/s) |
|---|---|---|
| 1 | 0.65 | 0.2 |
| 2 | 0.65 | 0.3 |
| 3 | 0.65 | 0.4 |
| 4 | 1.00 | 0.2 |
| 5 | 1.00 | 0.3 |
| 6 | 1.00 | 0.4 |
| 7 | 2.00 | 0.2 |
| 8 | 2.00 | 0.3 |
| 9 | 2.00 | 0.4 |
| Material | (kg/m3) | (Pa) | ||
|---|---|---|---|---|
| Air | 1.293 | 0 | 0.400 | 2.5 × 105 |
| Material | (kg/m3) | ||||
|---|---|---|---|---|---|
| Water | 1000 | 1450 | 1.921 | −0.096 | 0 |
| Material | (kg/m3) | (Pa) | |
|---|---|---|---|
| Sphere impactor | 1718.3 | 3.15 × 109 | 0.35 |
| Bridge specimen | 1190.0 | 3.15 × 109 | 0.35 |
| Case | Experiment (N) | Simulation (N) | Relative Error (%) |
|---|---|---|---|
| 1 | 7.224 | 6.962 | 3.627 |
| 2 | 7.724 | 7.312 | 5.334 |
| 3 | 8.446 | 8.959 | −6.074 |
| 4 | 8.956 | 8.508 | 5.002 |
| 5 | 10.552 | 9.813 | 7.003 |
| 6 | 12.027 | 12.335 | −2.561 |
| 7 | 10.218 | 10.542 | −3.171 |
| 8 | 12.461 | 11.434 | 8.242 |
| 9 | 13.578 | 13.319 | 1.907 |
| Symbols | AASHTO 1991 (ft) | This Study (m) |
|---|---|---|
| 195 | 59.4 | |
| 35 | 10.8 | |
| 20 | 8.4 | |
| 13 | 4.0 | |
| 12 | 3.8 | |
| 2–3 | 0.6 |
| Material | Input Parameter | Magnitude |
|---|---|---|
| Reinforced Concrete | concrete 𝜌 | 2500 kg/m3 |
| E | 29.58 GPa | |
| 𝜈 | 0.200 | |
| FRA_RF | 0.006 | |
| steel 𝜌 | 7850 kg/m3 | |
| Barge bow | E | 210 GPa |
| 0.270 | ||
| 𝜎 | 310 GPa | |
| C | 40 | |
| P | 5 | |
| Barge hull | 0.270 | |
| E | 210 GPa |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, C.; Zhao, S.; Liu, Q.; Liu, D.; Qiang, B.; Li, Y. Flume Experiments and Numerical Simulation of a Barge Collision with a Bridge Pier Based on Fluid–Structure Interaction. Sustainability 2023, 15, 6445. https://doi.org/10.3390/su15086445
Yao C, Zhao S, Liu Q, Liu D, Qiang B, Li Y. Flume Experiments and Numerical Simulation of a Barge Collision with a Bridge Pier Based on Fluid–Structure Interaction. Sustainability. 2023; 15(8):6445. https://doi.org/10.3390/su15086445
Chicago/Turabian StyleYao, Changrong, Shida Zhao, Qiaochao Liu, Dong Liu, Bin Qiang, and Yadong Li. 2023. "Flume Experiments and Numerical Simulation of a Barge Collision with a Bridge Pier Based on Fluid–Structure Interaction" Sustainability 15, no. 8: 6445. https://doi.org/10.3390/su15086445
APA StyleYao, C., Zhao, S., Liu, Q., Liu, D., Qiang, B., & Li, Y. (2023). Flume Experiments and Numerical Simulation of a Barge Collision with a Bridge Pier Based on Fluid–Structure Interaction. Sustainability, 15(8), 6445. https://doi.org/10.3390/su15086445