


Research on Integrated Scheduling of Multi-Mode Emergency Rescue for Flooding in Chemical Parks



Abstract
:1. Introduction
2. Problem Definition
2.1. Problem Description and Explanation of Parameters
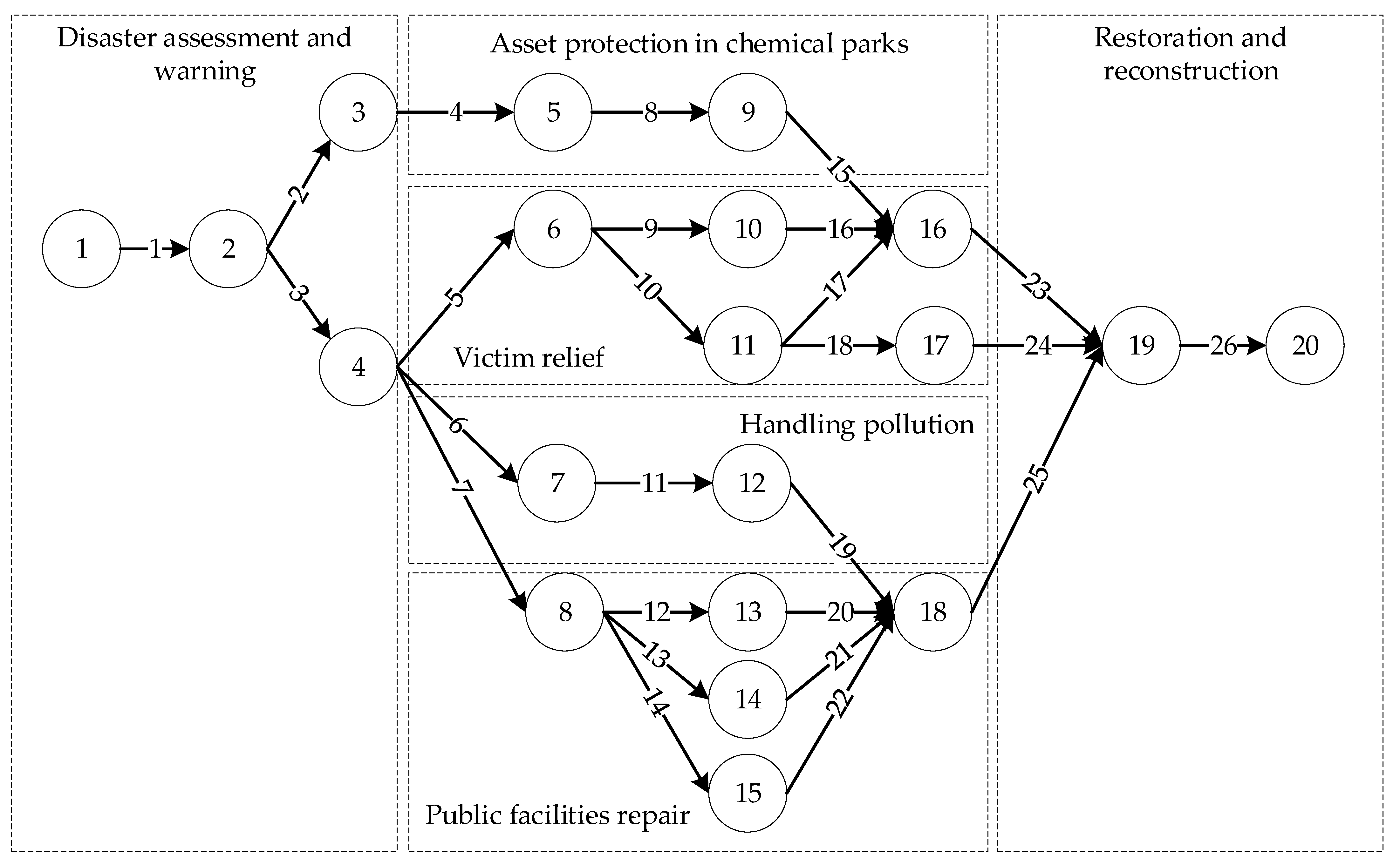
2.1.1. Problem Description
2.1.2. Explanations of Parameters and Variables
| Activity number, , where indicates the total number of real activities included in the rescue project. | |
| Time period number, , where indicates the maximum project duration. | |
| Resource serial number , where indicates the number of updateable resource species in the project. | |
| Duration when activity takes mode execution. | |
| Deadline for event . | |
| The set of activities immediately preceding activity . | |
| Start time of the activity . | |
| The set of completed activities at moment . | |
| The set of activities being executed at moment . | |
| The set of activities that have not yet started at moment . | |
| Capacity of the updateable resource. | |
| Activity has execution modes. | |
| The demand for resource when activity adopts mode . |
2.2. Model Construction
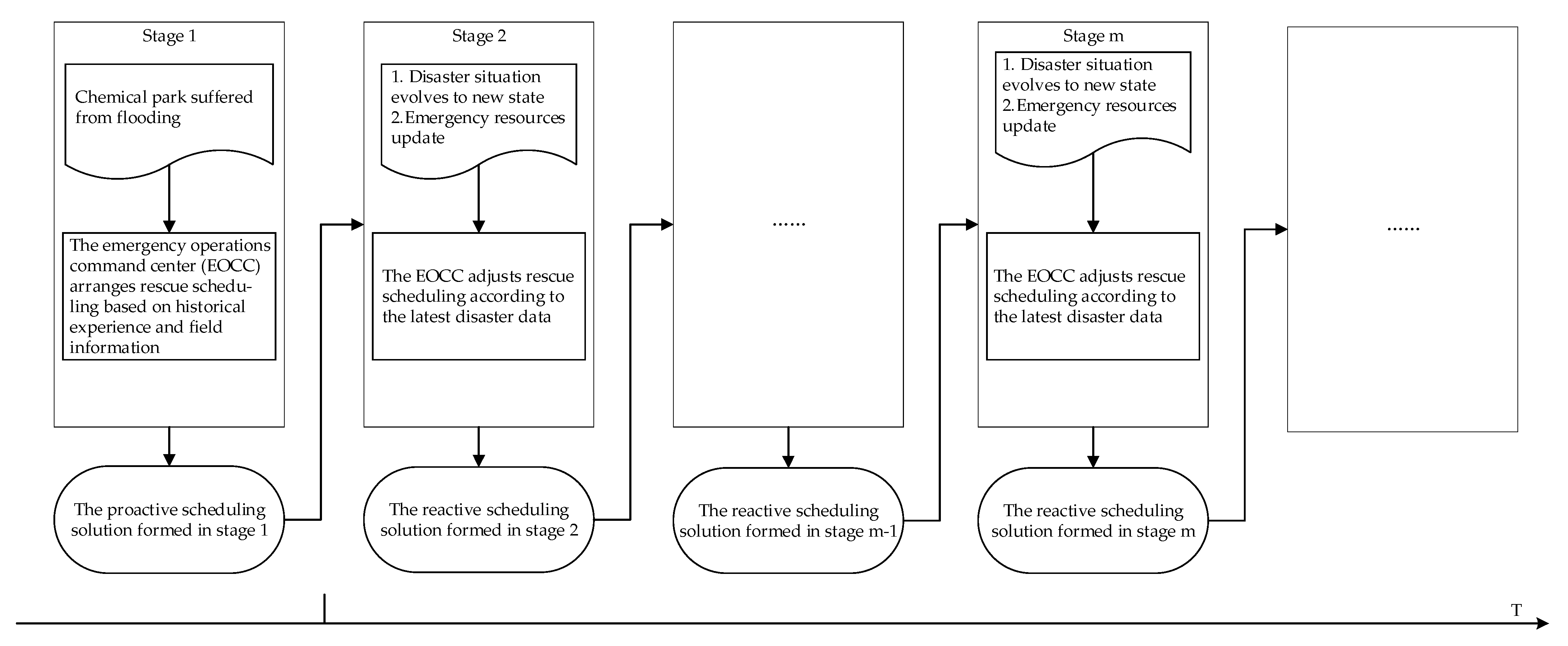
2.2.1. Construction of a Proactive Emergency Rescue Scheduling Model
2.2.2. Construction of a Reactive Emergency Rescue Scheduling Model
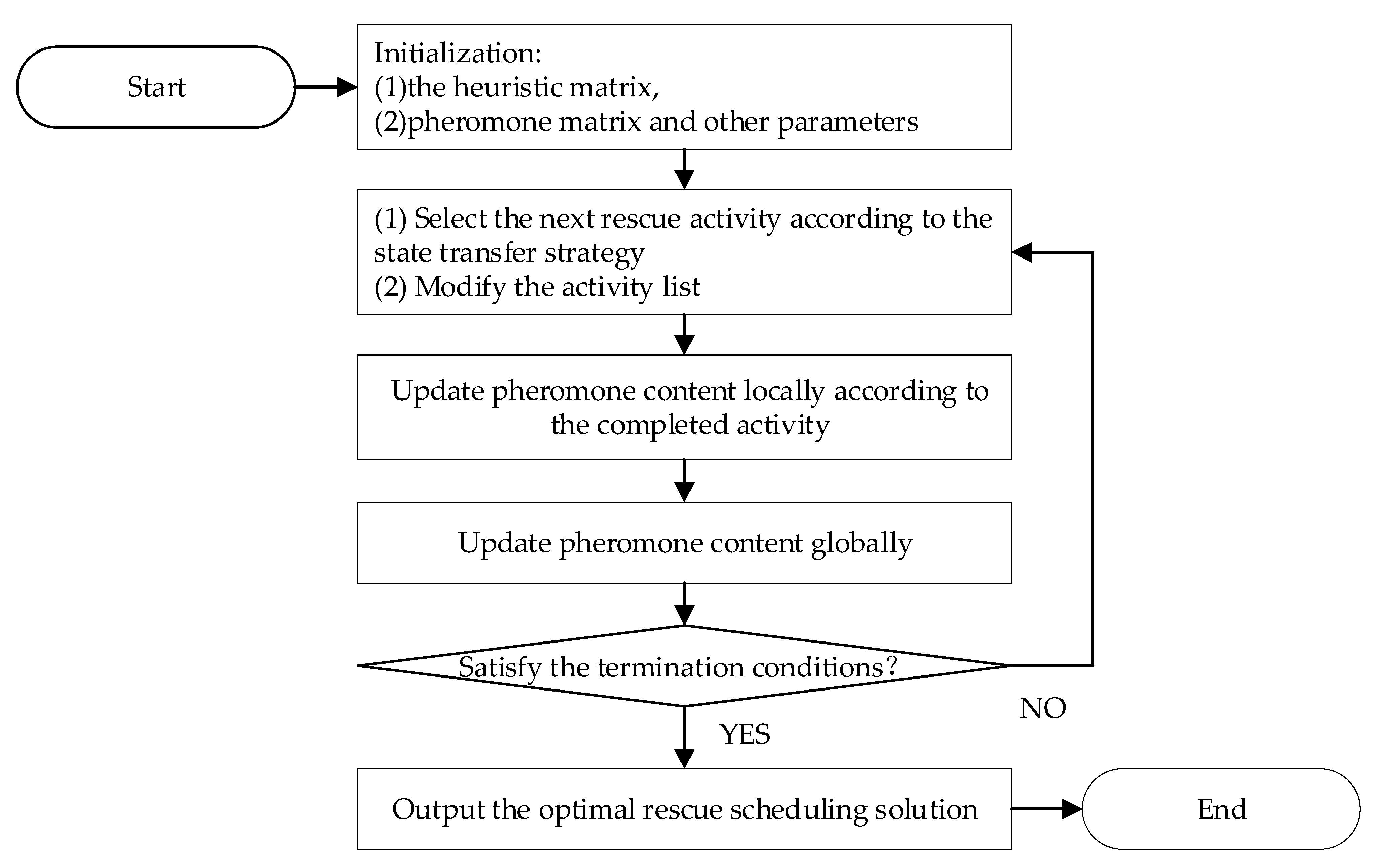
3. Solution Algorithm
3.1. Initialization
3.1.1. Initialization of the Heuristic Term Matrix
3.1.2. Initialization of the Pheromone Matrix
3.2. State Transfer Strategy
3.3. Pheromone Update
3.4. Establish Activity Priority Rules
3.5. Update the Event List
3.6. Solution of Reactive Emergency Rescue Scheduling Model
4. Computational Experiments
4.1. Case Data Description
4.2. Analysis of Calculation Results
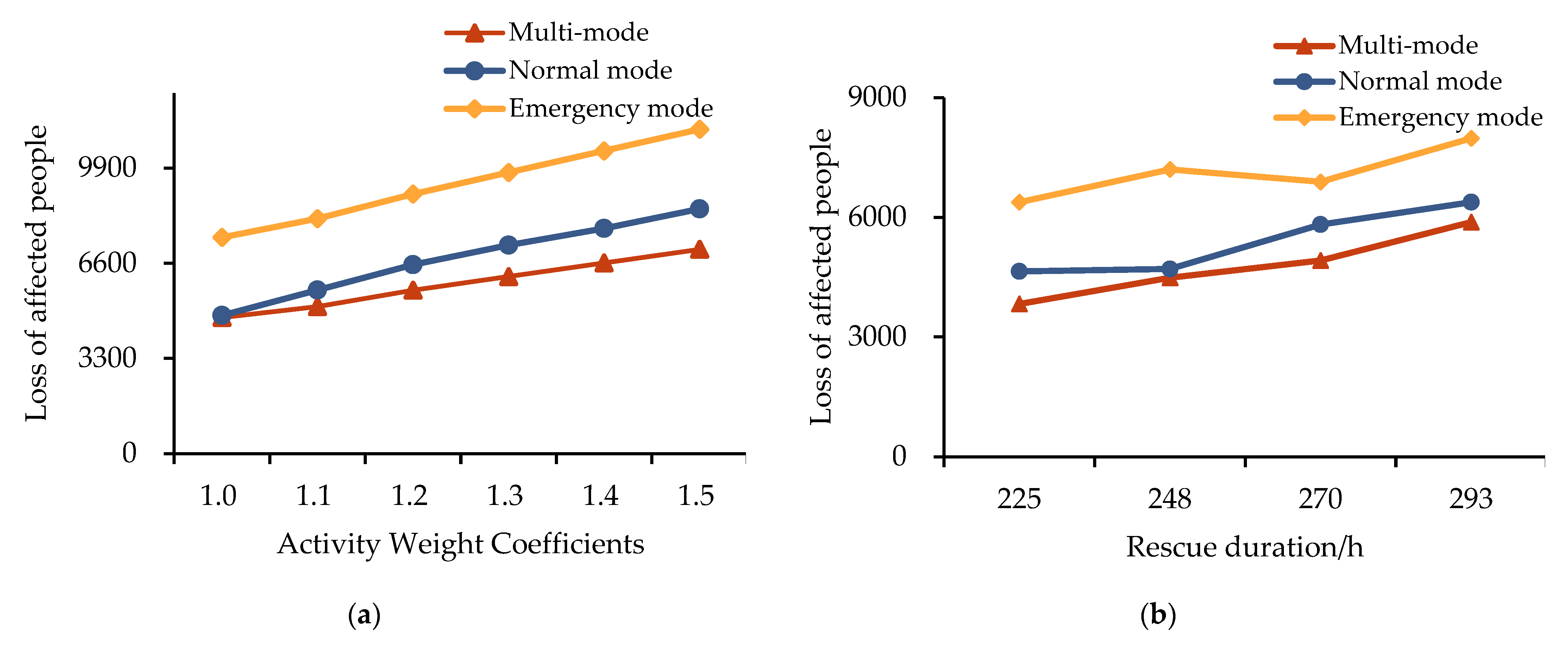
4.3. Sensitivity Analysis
5. Conclusions
- Under the constraint of limited resources, the integrated scheduling of multi-mode emergency rescue can improve rescue efficiency and effectively reduce the loss of affected people compared with a single mode.
- With an increase in emergency resources, the duration of rescue activities and the loss of affected people are gradually reduced when adopting a multi-modal execution of rescue activities in the new rescue environment.
- At the early stages of emergency response, the baseline rescue plan should follow the rescue principle of life first, giving priority to search and rescue, evacuation of residents, and other rescue work for affected people.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dong, J.X.; Asif, Z.; Shi, Y.R.; Zhu, Y.Y.; Chen, Z. Climate Change Impacts on Coastal and Offshore Petroleum Infrastructure and the Associated Oil Spill Risk: A Review. J. Mar. Sci. Eng. 2022, 10, 849. [Google Scholar] [CrossRef]
- Yang, Y.F.; Chen, G.H.; Chen, P.Z. The probability prediction method of domino effect triggered by lightning in chemical tank farm. Process Saf. Environ. Prot. 2018, 116, 106–114. [Google Scholar] [CrossRef]
- Men, J.K.; Chen, G.H.; Yang, Y.F.; Reniers, G. An event-driven probabilistic methodology for modeling the spatial-temporal evolution of natural hazard-induced domino chain in chemical industrial parks. Reliab. Eng. Syst. Saf. 2022, 226, 108723. [Google Scholar] [CrossRef]
- Yang, D.D.; Zheng, Y.; Peng, K.; Pan, L.D.; Zheng, J.; Xie, B.J.; Wang, B.H. Characteristics and Statistical Analysis of Large and above Hazardous Chemical Accidents in China from 2000 to 2020. Int. J. Environ. Res. Public Health 2022, 19, 15603. [Google Scholar] [CrossRef]
- Cozzani, V.; Campedel, M.; Renni, E.; Krausmann, E. Industrial accidents triggered by flood events: Analysis of past accidents. J. Hazard. Mater. 2010, 175, 501–509. [Google Scholar] [CrossRef]
- Qin, R.S.; Khakzad, N.; Zhu, J.P. An overview of the impact of Hurricane Harvey on chemical and process facilities in Texas. Int. J. Disaster Risk Reduct. 2020, 45, 101453. [Google Scholar] [CrossRef]
- Kolisch, R. Serial and parallel resource-constrained project scheduling methods revisited: Theory and computation. Eur. J. Oper. Res. 1996, 90, 320–333. [Google Scholar] [CrossRef]
- Misuri, A.; Cruz, A.M.; Park, H.; Garnier, E.; Ohtsu, N.; Hokugo, A.; Fujita, I.; Aoki, S.; Cozzani, V. Technological accidents caused by floods: The case of the Saga prefecture oil spill, Japan 2019. Int. J. Disaster Risk Reduct. 2021, 66, 102634. [Google Scholar] [CrossRef]
- Zeng, T.; Chen, G.H.; Reniers, G.; Yang, Y.F. Methodology for quantitative risk analysis of domino effects triggered by flood. Process Saf. Environ. Prot. 2021, 147, 866–877. [Google Scholar] [CrossRef]
- Zhang, C.; Wu, J.S.; Hu, X.F.; Ni, S.J. A probabilistic analysis model of oil pipeline accidents based on an integrated Event-Evolution-Bayesian (EEB) model. Process Saf. Environ. Prot. 2018, 117, 694–703. [Google Scholar] [CrossRef]
- Lan, M.; Gardoni, P.; Qin, R.S.; Zhang, X.; Zhu, J.P.; Lo, S.M. Modeling NaTech-related domino effects in process clusters: A network-based approach. Reliab. Eng. Syst. Saf. 2022, 221, 108329. [Google Scholar] [CrossRef]
- Reniers, G.L.L.; Sorensen, K.; Khan, F.; Amyotte, P. Resilience of chemical industrial areas through attenuation-based security. Reliab. Eng. Syst. Saf. 2014, 131, 94–101. [Google Scholar] [CrossRef]
- Liu, J.H.; Wu, J.F.; Liu, W.S. Study on Evaluation Model of Emergency Rescue Capability of Chemical Accidents Based on PCA-BP. Comput. Intell. Neurosci. 2021, 2021, 8869608. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.L.; Wang, Y.D. Emergency Capacity of Small Towns to Endure Sudden Environmental Pollution Accidents: Construction and Application of an Evaluation Model. Sustainability 2021, 13, 5511. [Google Scholar] [CrossRef]
- Xu, K.; Gai, W.M.; Salhi, S. Dynamic emergency route planning for major chemical accidents: Models and application. Saf. Sci. 2021, 135, 105113. [Google Scholar] [CrossRef]
- Phark, C.; Kim, S.; Jung, S. Development to Emergency Evacuation Decision Making in Hazardous Materials Incidents Using Machine Learning. Processes 2022, 10, 1046. [Google Scholar] [CrossRef]
- Li, K.; Yu, H.L.; Xu, Y.Q.; Luo, X.Q. Scheduling Optimization of Offshore Oil Spill Cleaning Materials Considering Multiple Accident Sites and Multiple Oil Types. Sustainability 2022, 14, 10047. [Google Scholar] [CrossRef]
- Luscombe, R.; Kozan, E. Dynamic resource allocation to improve emergency department efficiency in real time. Eur. J. Oper. Res. 2016, 255, 593–603. [Google Scholar] [CrossRef]
- Liu, J.; Guo, L.; Jiang, J.P.; Jiang, D.X.; Wang, P. Emergency material allocation with time-varying supply-demand based on dynamic optimization method for river chemical spills. Environ. Sci. Pollut. Res. 2018, 25, 17343–17353. [Google Scholar] [CrossRef]
- Liu, J.; Guo, L.; Jiang, J.P.; Jiang, D.X.; Wang, P. Emergency material allocation and scheduling for the application to chemical contingency spills under multiple scenarios. Environ. Sci. Pollut. Res. 2017, 24, 956–968. [Google Scholar] [CrossRef]
- Lu, J.F.; Yang, Q. Location Optimization of Emergency Station for Dangerous Goods Accidents Considering Risk. Sustainability 2022, 14, 6088. [Google Scholar] [CrossRef]
- Lutter, P.; Degel, D.; Busing, C.; Koster, A.; Werners, B. Improved handling of uncertainty and robustness in set covering problems. Eur. J. Oper. Res. 2017, 263, 35–49. [Google Scholar] [CrossRef]
- Abounacer, R.; Rekik, M.; Renaud, J. An exact solution approach for multi-objective location-transportation problem for disaster response. Comput. Oper. Res. 2014, 41, 83–93. [Google Scholar] [CrossRef]
- Li, S.L.; Teo, K.L. Post-disaster multi-period road network repair: Work scheduling and relief logistics optimization. Ann. Oper. Res. 2019, 283, 1345–1385. [Google Scholar] [CrossRef]
- Geng, J.X.; Hou, H.P.; Geng, S.Q. Optimization of Warehouse Location and Supplies Allocation for Emergency Rescue under Joint Government-Enterprise Cooperation Considering Disaster Victims’ Distress Perception. Sustainability 2021, 13, 10560. [Google Scholar] [CrossRef]
- Ghasemi, P.; Goodarzian, F.; Munuzuri, J.; Abraham, A. A cooperative game theory approach for location-routing-inventory decisions in humanitarian relief chain incorporating stochastic planning. Appl. Math. Model. 2022, 104, 750–781. [Google Scholar] [CrossRef]
- Wex, F.; Schryen, G.; Feuerriegel, S.; Neumann, D. Emergency response in natural disaster management: Allocation and scheduling of rescue units. Eur. J. Oper. Res. 2014, 235, 697–708. [Google Scholar] [CrossRef]
- Tirkolaee, E.B.; Aydin, N.S.; Ranjbar-Bourani, M.; Weber, G.W. A robust bi-objective mathematical model for disaster rescue units allocation and scheduling with learning effect. Comput. Ind. Eng. 2020, 149, 106790. [Google Scholar] [CrossRef]
- Nayeri, S.; Sazvar, Z.; Heydari, J. A fuzzy robust planning model in the disaster management response phase under precedence constraints. Oper. Res. 2022, 22, 3571–3605. [Google Scholar] [CrossRef]
- Rose, K.H. A Guide to the Project Management Body of Knowledge (PMBOK (R) Guide), Fifth Edition. Proj. Manag. J. 2013, 44, e1. [Google Scholar] [CrossRef]
- Deblaere, F.; Demeulemeester, E.; Herroelen, W. Reactive scheduling in the multi-mode RCPSP. Comput. Oper. Res. 2011, 38, 63–74. [Google Scholar] [CrossRef]
- Balouka, N.; Cohen, I. A robust optimization approach for the multi-mode resource-constrained project scheduling problem. Eur. J. Oper. Res. 2021, 291, 457–470. [Google Scholar] [CrossRef]
- Mika, M.; Waligora, G.; Weglarz, J. Tabu search for multi-mode resource-constrained project scheduling with schedule-dependent setup times. Eur. J. Oper. Res. 2008, 187, 1238–1250. [Google Scholar] [CrossRef]
- Van de Vonder, S.; Ballestin, F.; Demeulemeester, E.; Herroelen, W. Heuristic procedures for reactive project scheduling. Comput. Ind. Eng. 2007, 52, 11–28. [Google Scholar] [CrossRef]
- Chakrabortty, R.K.; Rahman, H.F.; Haque, K.M.A.; Paul, S.K.; Ryan, M.J. An event-based reactive scheduling approach for the Resource Constrained Project Scheduling Problem with unreliable resources. Comput. Ind. Eng. 2021, 151, 106981. [Google Scholar] [CrossRef]
- Ma, Z.Q.; Demeulemeester, E.; He, Z.W.; Wang, N.M. A computational experiment to explore better robustness measures for project scheduling under two types of uncertain environments. Comput. Ind. Eng. 2019, 131, 382–390. [Google Scholar] [CrossRef]
- Lambrechts, O.; Demeulemeester, E.; Herroelen, W. Proactive and reactive strategies for resource-constrained project scheduling with uncertain resource availabilities. J. Sched. 2008, 11, 121–136. [Google Scholar] [CrossRef]
- Yan, L.; Jinsong, B.; Xiaofeng, H.; Ye, J. A heuristic project scheduling approach for quick response to maritime disaster rescue. Int. J. Proj. Manag. 2009, 27, 620–628. [Google Scholar] [CrossRef]
- Wang, Y.; He, Z.; Liu, R. Integrated optimization of proactive scheduling and reactive scheduling for emergency rescue. Syst. Eng. Theory Pract. 2015, 35, 945–954. [Google Scholar]
- Ge, H.; Liu, N.; Zhang, G.; Yu, H. A model for distribution of multiple emergency commodities to multiple affected areas based on loss of victims of calamity. J. Syst. Manag. 2010, 19, 541–545. [Google Scholar]
- Peng, W.; Lin, J. An Improved Reactive Scheduling Problem of Multi-mode RCPSP. Oper. Res. Manag. Sci. 2022, 31, 28–34. [Google Scholar]
- Cao, C.J.; Li, C.D.; Yang, Q.; Liu, Y.; Qu, T. A novel multi-objective programming model of relief distribution for sustainable disaster supply chain in large-scale natural disasters. J. Clean. Prod. 2018, 174, 1422–1435. [Google Scholar] [CrossRef]
- Brcic, M.; Katic, M.; Hlupic, N. Planning horizons based proactive rescheduling for stochastic resource-constrained project scheduling problems. Eur. J. Oper. Res. 2019, 273, 58–66. [Google Scholar] [CrossRef]
- Chakrabortty, R.K.; Sarker, R.A.; Essam, D.L. Single mode resource constrained project scheduling with unreliable resources. Oper. Res. 2020, 20, 1369–1403. [Google Scholar] [CrossRef]
- Brucker, P.; Drexl, A.; Mohring, R.; Neumann, K.; Pesch, E. Resource-constrained project scheduling: Notation, classification, models, and methods. Eur. J. Oper. Res. 1999, 112, 3–41. [Google Scholar] [CrossRef]
- Mullen, R.J.; Monekosso, D.; Barman, S.; Remagnino, P. A review of ant algorithms. Expert Syst. Appl. 2009, 36, 9608–9617. [Google Scholar] [CrossRef]
- Merkle, D.; Middendorf, M.; Schmeck, H. Ant colony optimization for resource-constrained project scheduling. IEEE Trans. Evol. Comput. 2002, 6, 333–346. [Google Scholar] [CrossRef]
- Ahmadizar, F. A new ant colony algorithm for makespan minimization in permutation flow shops. Comput. Ind. Eng. 2012, 63, 355–361. [Google Scholar] [CrossRef]
- Chang, M.S.; Tseng, Y.L.; Chen, J.W. A scenario planning approach for the flood emergency logistics preparation problem under uncertainty. Transp. Res. Pt. E Logist. Transp. Rev. 2007, 43, 737–754. [Google Scholar] [CrossRef]
- Li, W.J.; Xu, B.; Wen, J.H. Scenario-based community flood risk assessment: A case study of Taining county town, Fujian province, China. Nat. Hazards 2016, 82, 193–208. [Google Scholar] [CrossRef]
- Li, W.L.; Zhu, J.; Fu, L.; Zhu, Q.; Xie, Y.K.; Hu, Y. An augmented representation method of debris flow scenes to improve public perception. Int. J. Geogr. Inf. Sci. 2021, 35, 1521–1544. [Google Scholar] [CrossRef]
- Li, W.L.; Zhu, J.; Fu, L.; Zhu, Q.; Guo, Y.K.; Gong, Y.H. A rapid 3D reproduction system of dam-break floods constrained by post-disaster information. Environ. Modell. Softw. 2021, 139, 104994. [Google Scholar] [CrossRef]
- Kedir, N.S.; Somi, S.; Fayek, A.R.; Nguyen, P.H.D. Hybridization of reinforcement learning and agent-based modeling to optimize construction planning and scheduling. Autom. Constr. 2022, 142, 104498. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | [27] | [28] | [35] | [36] | [37] | [38] | [39] | [40] | [41] | This Paper | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Uncertain factors | Resources | √ | √ | √ | √ | √ | √ | √ | √ | ||
| Activity duration | √ | √ | √ | ||||||||
| Uncertain scenarios | √ | √ | √ | √ | |||||||
| Objective functions | Loss of affected people | √ | √ | ||||||||
| Robustness | √ | √ | √ | √ | √ | √ | |||||
| Cost | √ | ||||||||||
| Rescue efficiency | √ | √ | √ | √ | √ | √ | |||||
| Execution Modes | Single mode | √ | √ | √ | √ | √ | √ | √ | √ | ||
| Multi-mode | √ | √ | |||||||||
| Scheduling methods | Proactive scheduling | √ | √ | √ | √ | √ | |||||
| Reactive scheduling | √ | √ | |||||||||
| Proactive–reactive integrated scheduling | √ | √ | √ | ||||||||
| Activity Number | Activity Name | Normal Mode | Emergency Mode | Activity Weights | Sequence of Events | ||
|---|---|---|---|---|---|---|---|
| Expected Duration | Expected Input Resources | Expected Duration | Expected Input Resources | ||||
| 0 | Disaster Occurrence | 0 | (0,0) | 0 | (0,0) | 0 | 0–1 |
| 1 | Disaster investigation and assessment | 24 | (60,20) | 19 | (72,24) | 0.01 | 1–2 |
| 2 | Hidden danger inspection | 20 | (80,30) | 16 | (96,36) | 0.01 | 2–3 |
| 3 | Geological disaster prevention | 24 | (90,40) | 16 | (102,45) | 0.04 | 2–4 |
| 4 | Pumping and draining | 68 | (70,25) | 54 | (84,30) | 0.06 | 3–5 |
| 5 | Search and rescue | 48 | (240,70) | 36 | (288,84) | 0.07 | 4–6 |
| 6 | On-site traffic control | 60 | (60,20) | 48 | (72,24) | 0.01 | 4–7 |
| 7 | Fire fighting | 24 | (80,20) | 16 | (96,24) | 0.07 | 4–8 |
| 8 | Road repair | 22 | (120,36) | 16 | (140,40) | 0.06 | 5–9 |
| 9 | Evacuation of residents | 12 | (90,30) | 8 | (110,36) | 0.04 | 6–10 |
| 10 | Transfer of affected people | 6 | (80,40) | 5 | (96,48) | 0.04 | 6–11 |
| 11 | Pollution treatment | 96 | (120,60) | 65 | (142,72) | 0.06 | 7–12 |
| 12 | Electricity repair | 12 | (30,15) | 10 | (36,18) | 0.01 | 8–13 |
| 13 | Gas supply repair | 20 | (20,10) | 15 | (22,12) | 0.03 | 8–14 |
| 14 | Water supply repair | 26 | (20,10) | 18 | (24,12) | 0.03 | 8–15 |
| 15 | Asset transfer protection | 19 | (50,20) | 12 | (58,24) | 0.04 | 9–16 |
| 16 | Communication guarantee | 24 | (16,8) | 18 | (20,10) | 0.03 | 10–16 |
| 17 | Material supply | 48 | (73,20) | 28 | (96,24) | 0.04 | 11–16 |
| 18 | Medical assistance | 36 | (100,30) | 25 | (115,36) | 0.06 | 11–17 |
| 19 | Environmental monitoring | 20 | (20,10) | 20 | (20,10) | 0.01 | 12–18 |
| 20 | Electricity guarantee | 12 | (15,8) | 10 | (18,10) | 0.04 | 13–18 |
| 21 | Gas supply guarantee | 12 | (10,5) | 8 | (12,6) | 0.01 | 14–18 |
| 22 | Water supply guarantee | 12 | (10,5) | 9 | (12,6) | 0.04 | 15–18 |
| 23 | Epidemic prevention | 19 | (50,20) | 12 | (58,24) | 0.01 | 16–19 |
| 24 | Resettlement of people | 30 | (160,80) | 22 | (192,96) | 0.06 | 17–19 |
| 25 | Hidden danger detection | 40 | (60,20) | 32 | (72,24) | 0.04 | 18–19 |
| 26 | Reconstruction and repair | 72 | (180,80) | 58 | (216,96) | 0.06 | 19–20 |
| 27 | End | 0 | (0,0) | 0 | (0,0) | 0 | 20–21 |
| Serial Number | Reactive Scheduling Solutions | Rescue Duration (h) | Loss of Affected People | Magnitude of Loss Change |
|---|---|---|---|---|
| 1 | (0,0,135,0,141,16,62,24,154,34,129,64,24,42,42,160, 170,155,129,129,129,129,129,129,216,189,155,219,238) | 238 | 3971.83 | −18.89% |
| 2 | (0,0,95,0,115,16,62,24,142,34,64,77,24,42,42,142, 190,142,64,85,85,80,85,205,183,142,205,208) | 208 | 3696.61 | −7.45% |
| 3 | (0,0,95,0,115,16,62,24,145,34,64,77,24,42,42,188, 188,145,64,85,85,80,85,207,177,145,207,212) | 212 | 3639.65 | −1.56% |
| Total | - | - | - | −27.90% |
| Resource Portfolio | Rescue Personnel | Rescue Equipment |
|---|---|---|
| 1 | 603 | 99 |
| 2 | 608 | 103 |
| 3 | 668 | 106 |
| 4 | 735 | 117 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, B.; Zhan, W. Research on Integrated Scheduling of Multi-Mode Emergency Rescue for Flooding in Chemical Parks. Sustainability 2023, 15, 2930. https://doi.org/10.3390/su15042930
Guo B, Zhan W. Research on Integrated Scheduling of Multi-Mode Emergency Rescue for Flooding in Chemical Parks. Sustainability. 2023; 15(4):2930. https://doi.org/10.3390/su15042930
Chicago/Turabian StyleGuo, Bowen, and Wei Zhan. 2023. "Research on Integrated Scheduling of Multi-Mode Emergency Rescue for Flooding in Chemical Parks" Sustainability 15, no. 4: 2930. https://doi.org/10.3390/su15042930
APA StyleGuo, B., & Zhan, W. (2023). Research on Integrated Scheduling of Multi-Mode Emergency Rescue for Flooding in Chemical Parks. Sustainability, 15(4), 2930. https://doi.org/10.3390/su15042930