
Hands-on Learning: Assessing the Impact of a Mobile Robot Platform in Engineering Learning Environments

 ,
,  ,
,  ,
,  , and
, and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Engineering Learning Environment
2.1.1. Educational Context: SIT Subject
- Analyze and design product specifications.
- Follow a proper methodology for successful address-based system design microcontrollers (firmware and hardware), paying particular attention to developing real embedded applications.
- Plan an architecture carefully while considering any design restrictions and the interrelation between various elements and analyze and design modules, subsystems, circuits, libraries, and platforms based on microprocessors and/or reconfigurable devices.
- Select appropriate project design, synthesis, and debugging tools to ensure the accurate development of an electronic product.
- Provide the technical specifications for a project that involves digital electronic systems.
- Make appropriate design decisions as a professional designer does.
2.1.2. Learning Strategy
- Introduction to a co-design project: students are introduced to the features of the PSoC device and its programming tool (PSoC Creator) by implementing a guided project to control the RGB LED.
- General-purpose input–output ports: students develop several short PSoC projects to learn how to control some output and input pins, exploring the advanced functions, such as interruptions and hardware configurations.
- Timers, counters, and PWM modules: students follow short tutorials to learn how to configure these modules and, finally, they implement PSoC projects to control several external modules, such as a DC motor and an ultrasonic sensor.
- Communications: students follow short tutorials to learn how to configure UART, I2C, SPI, and BLE communications modules. Finally, they implement PSoC projects to control several external modules, such as the LED matrix driver.
- Analog peripherals: students follow short tutorials to learn how to configure ADCs, operational amplifiers, and DAC modules. Finally, they implement PSoC projects to control several external modules, such as LDR and IR (line detector) sensors.
- Active participation: students are actively involved in the learning process, taking an active role in exploring and understanding the PSoC device and how to co-design it to interact with external modules.
- Real-world context: learning activities are designed to emulate real-world scenarios, such as communicating an embedded device with external modules, making the knowledge and skills more relevant and applicable.
- Experiments: all the exercises involve using the PSoC evaluation kit, designing the hardware and programming the behavior to solve the proposed problem. This allows students to explore concepts, solve problems, and see the results of their actions.
- Critical thinking: through verifying the behavior upload to the PSoC evaluation kit, students are encouraged to think critically, analyze information, and make decisions based on their observations and understanding. They receive immediate feedback on their performance, enabling them to make corrections and improvements quickly.
- Enhanced retention: the progressive levels of experimental activities proposed with the PSoC evaluation kit improve knowledge retention as students form strong connections between theory and practice.
- Motivation and engagement: active learning with the PSoC evaluation kit can increase motivation and engagement, leading to a deeper interest in the subject.
- Creativity: the project proposed by the teaching team is an open-ended problem, since they only provide minimal requirements. Hence, student teams have to think about a need in the industry or a problem in a domestic application that can be solved with the mobile robot platform provided. This problem does not have a single correct answer, allowing students to explore various possibilities and think outside the box to find creative solutions.
- Problem analysis: students analyze the problem they want to solve with the robot mobile platform, identifying what they already know and what they need to learn to address the issue effectively.
- Application of knowledge: students must use the expertise gained in the first stage of the subject, encouraging the application of previous knowledge to real-world situations.
- Collaboration: students learn to work effectively in teams and appreciate diverse perspectives.
- Skill development: the development of the project with the mobile robot platform based on the PSoC promotes enhancing various skills, such as problem solving, communication, teamwork, creativity, and adaptability.
- Presentation and reflection: groups present their projects that were implemented on the robot mobile platform based on the PSoC to the class, fostering further discussion and reflection on the problem-solving process.
2.1.3. Qualification in the SIT Subject
- Verification of completing the first stage, the hands-on sessions, which accounts for 35% of the final grade.
- Defense of the project based on the mobile robot platform during the second stage, through a presentation, which accounts for 35% of the final grade.
- An exam consisting of practical test questions based on the hands-on sessions and the project developed with the PSoC device, which accounts for 30% of the final grade.
2.2. Description of the Mobile Robot Platform
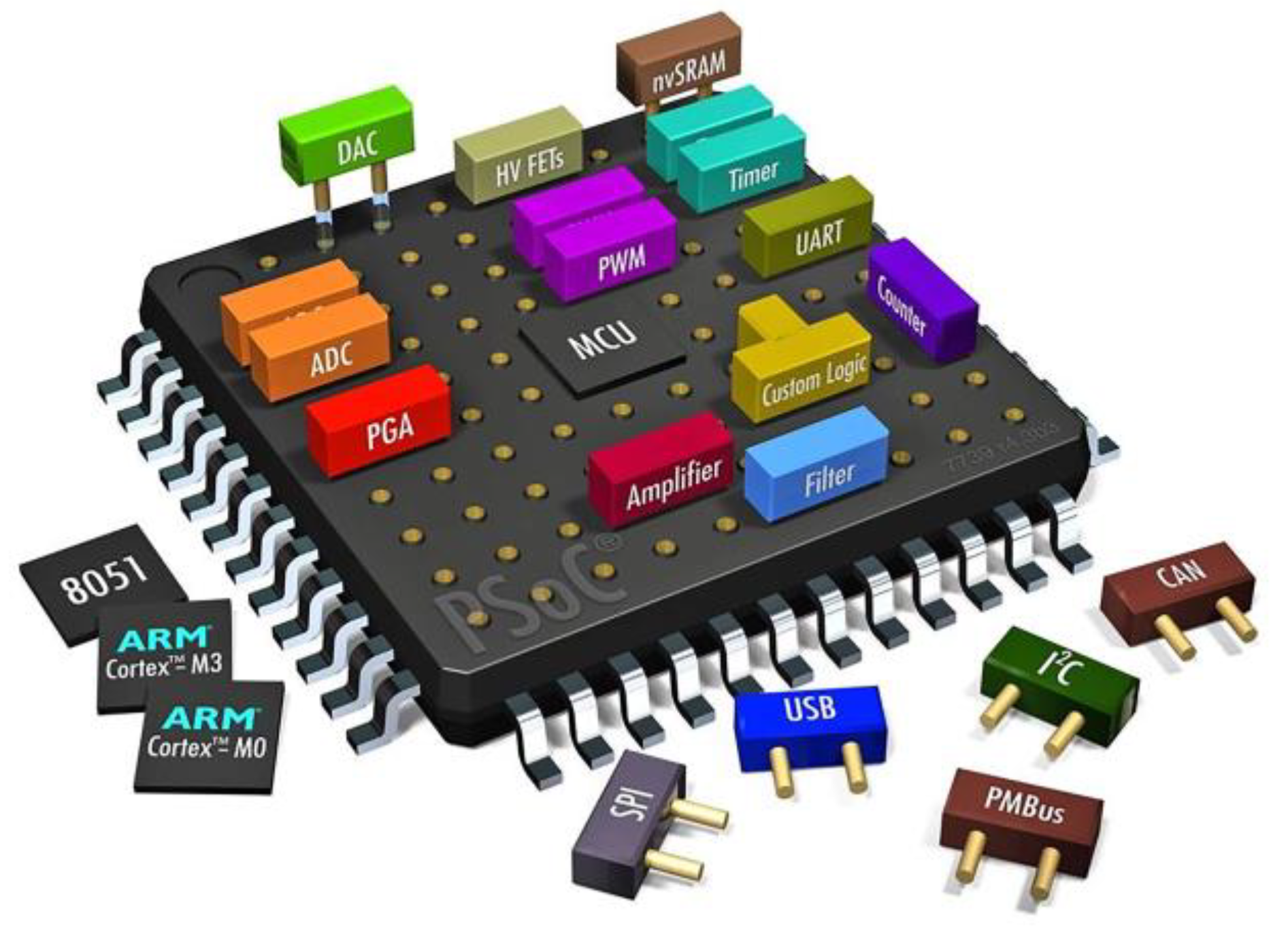
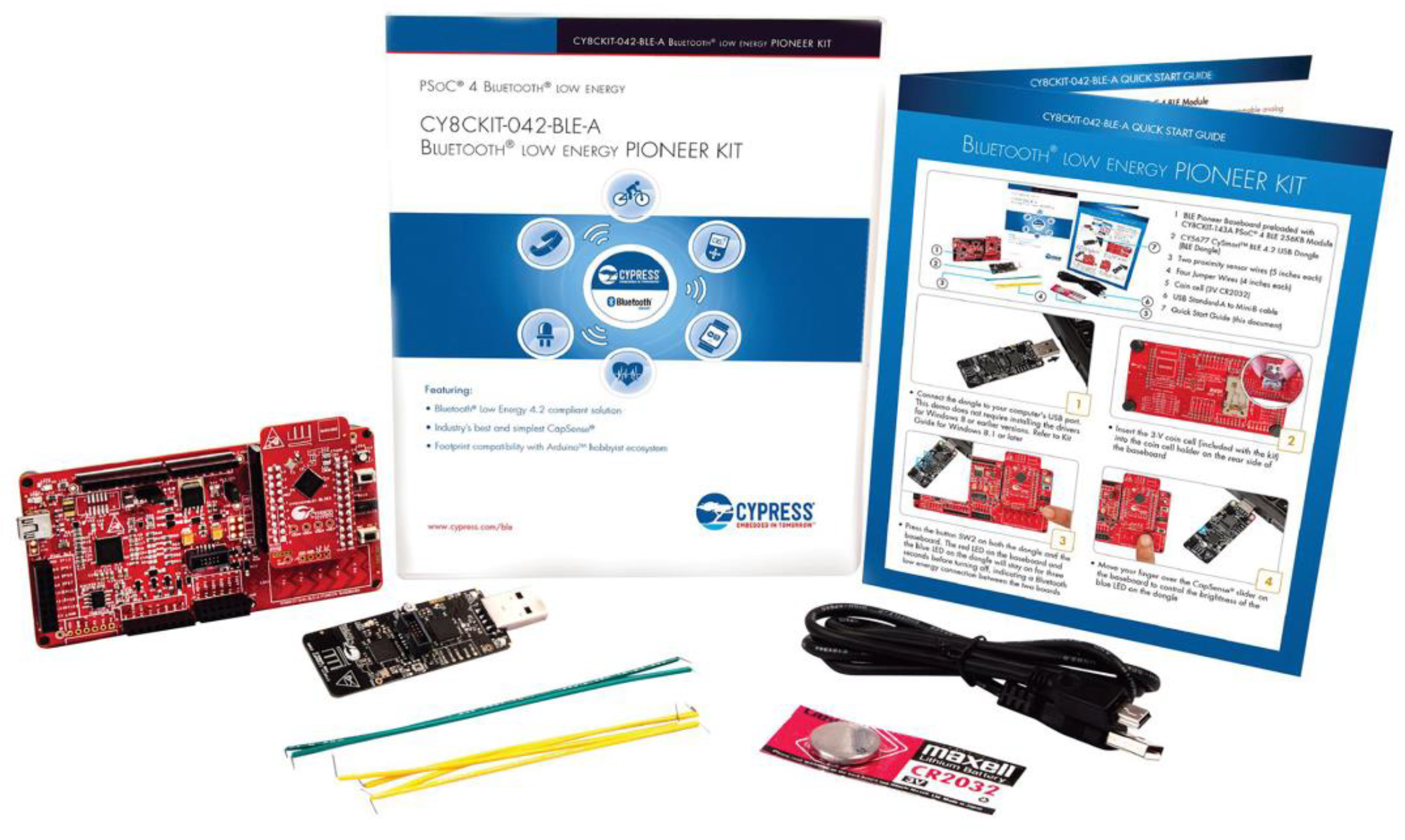
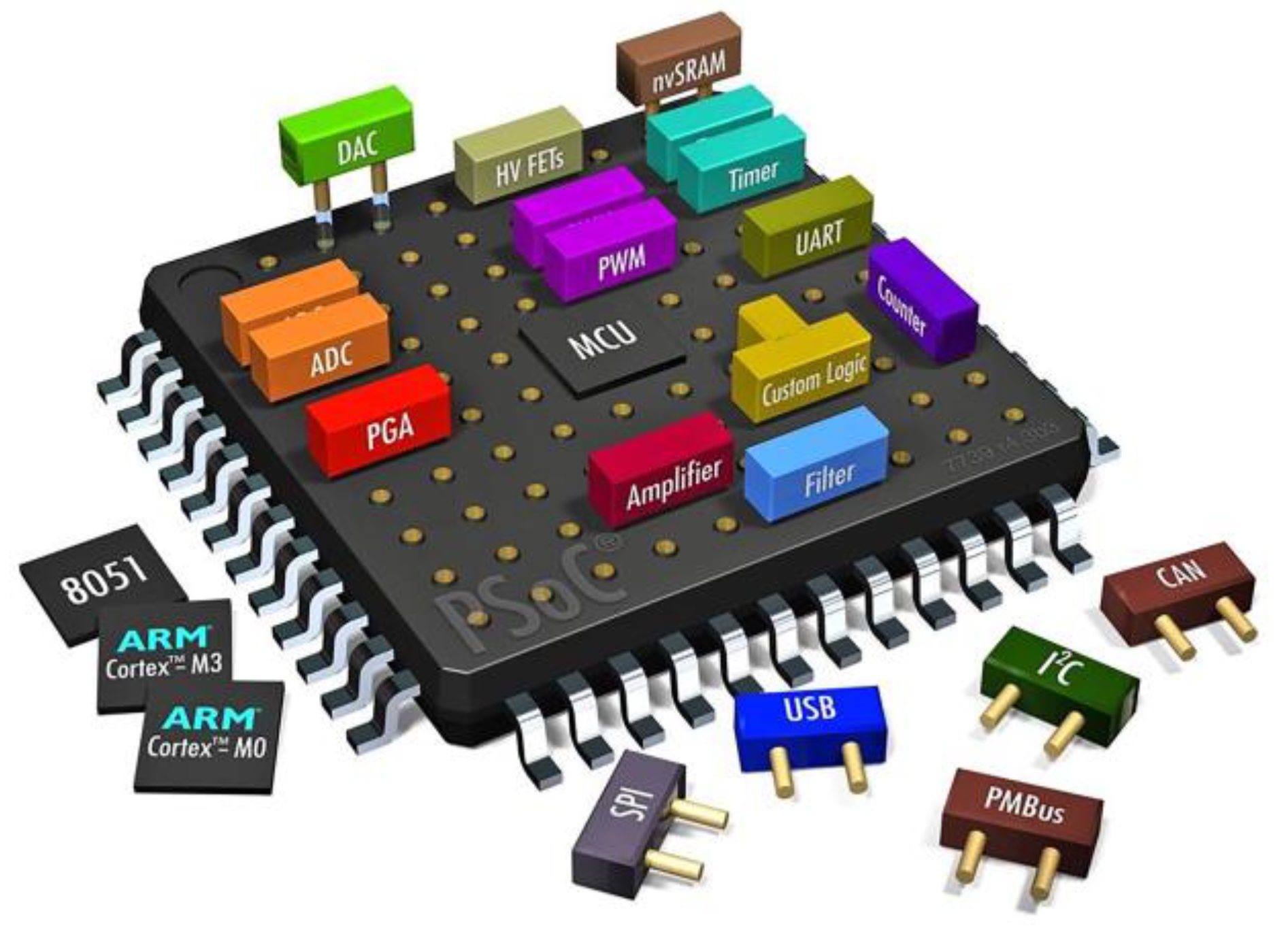
2.2.1. Embedded Device: PSoC
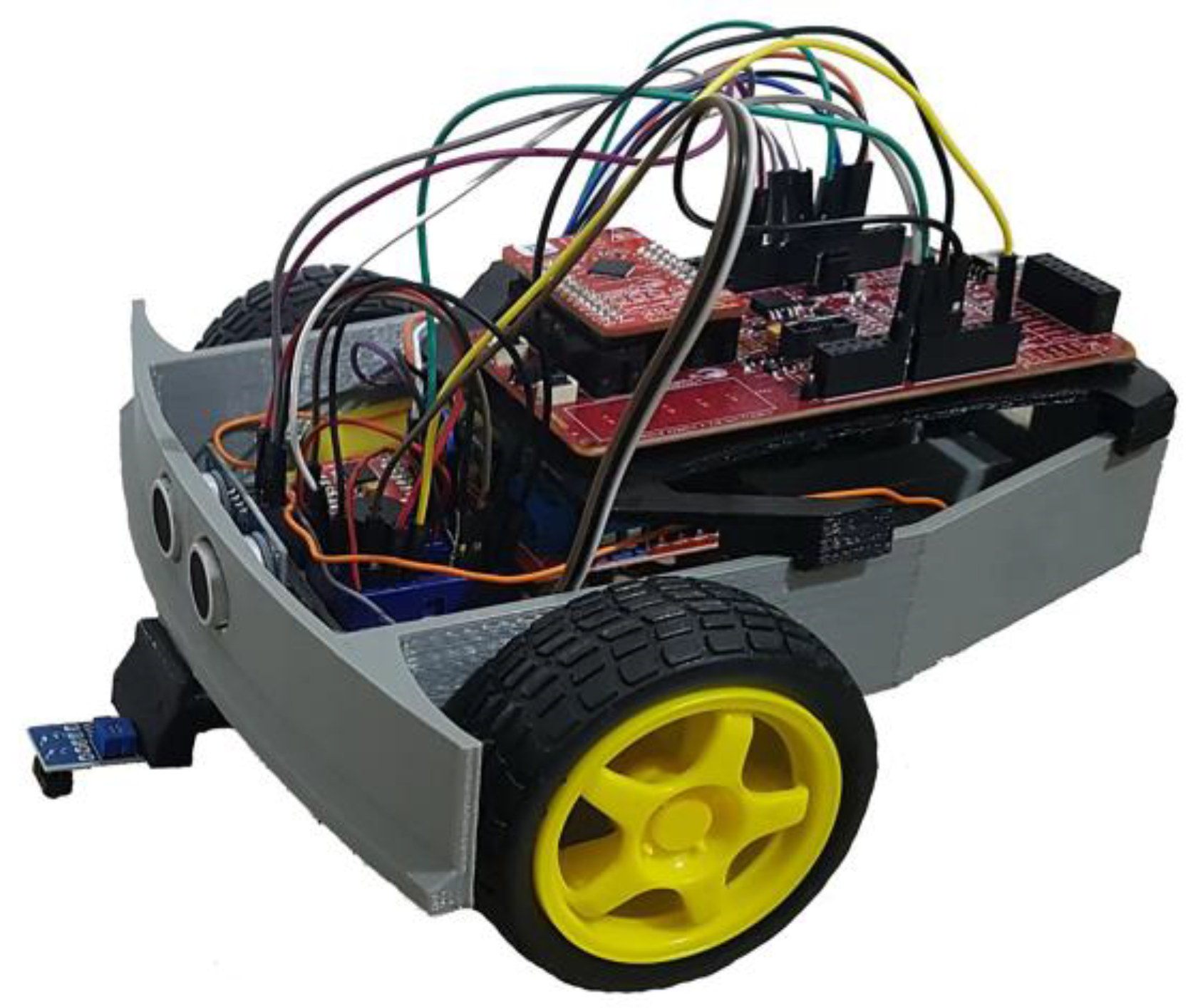
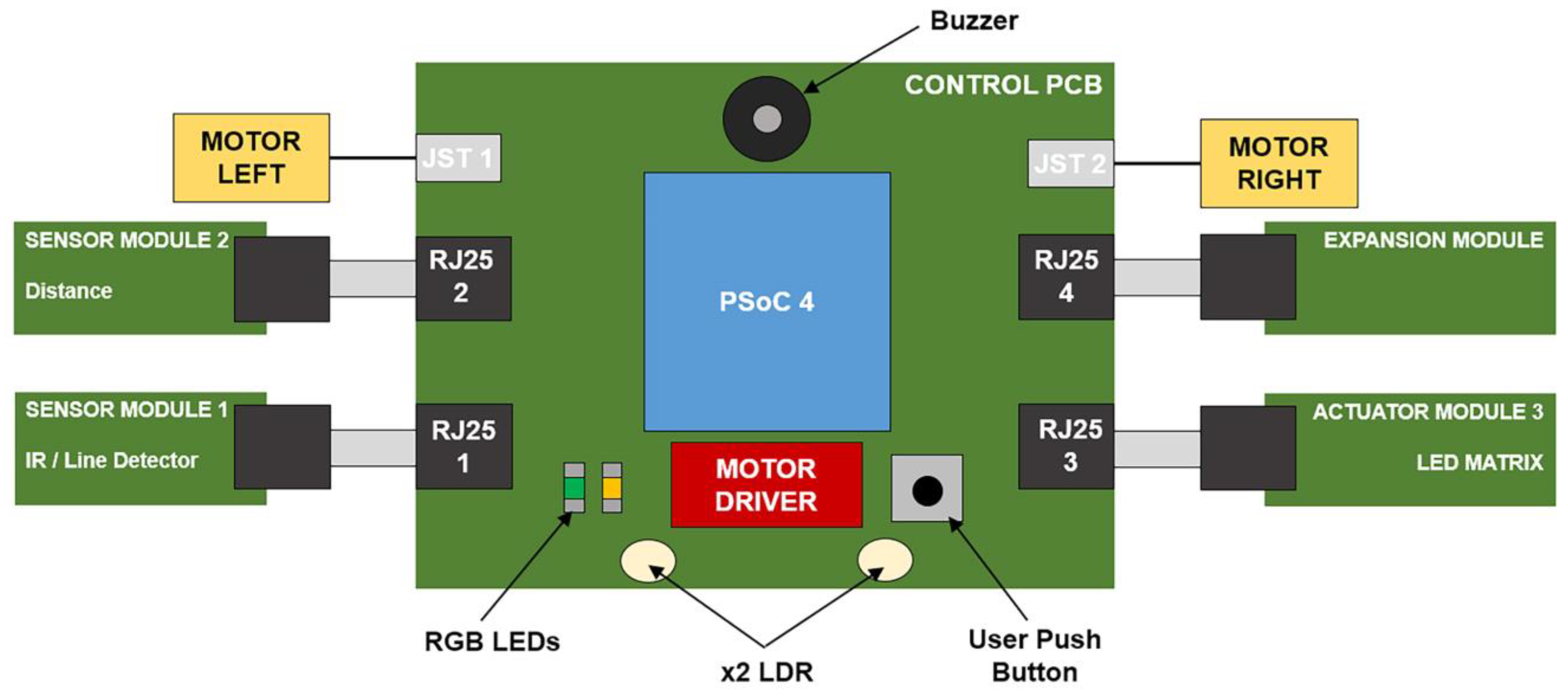
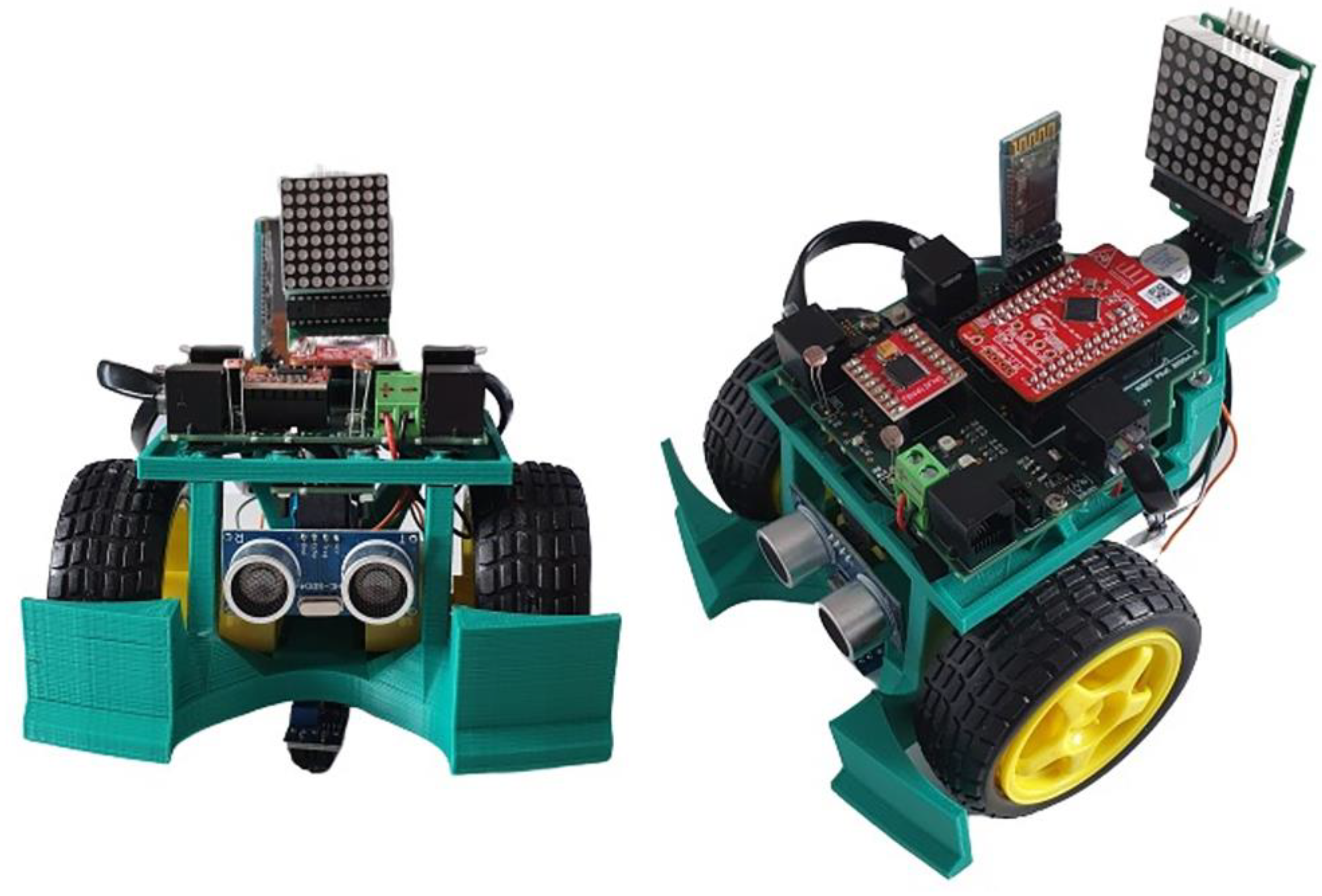
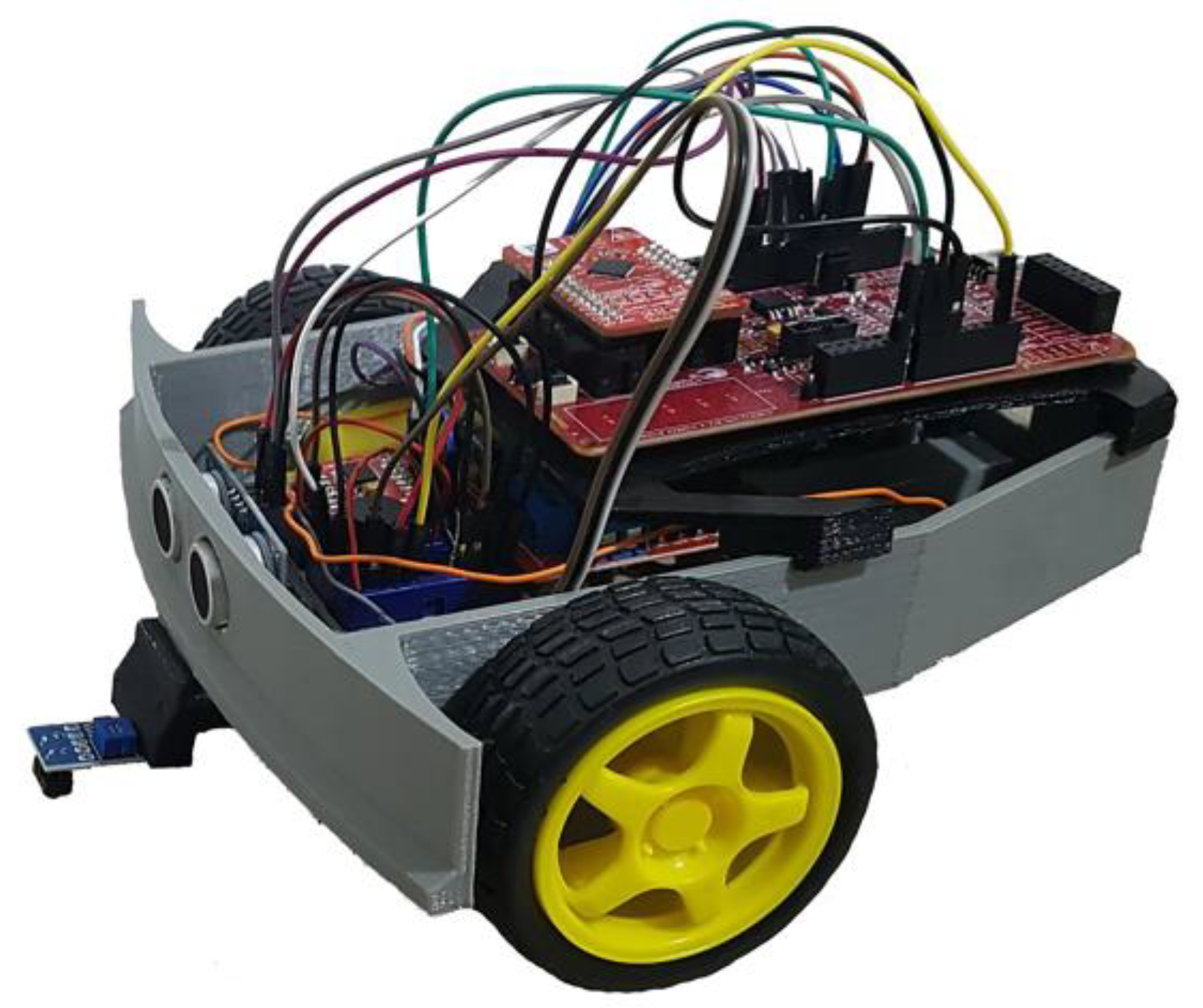
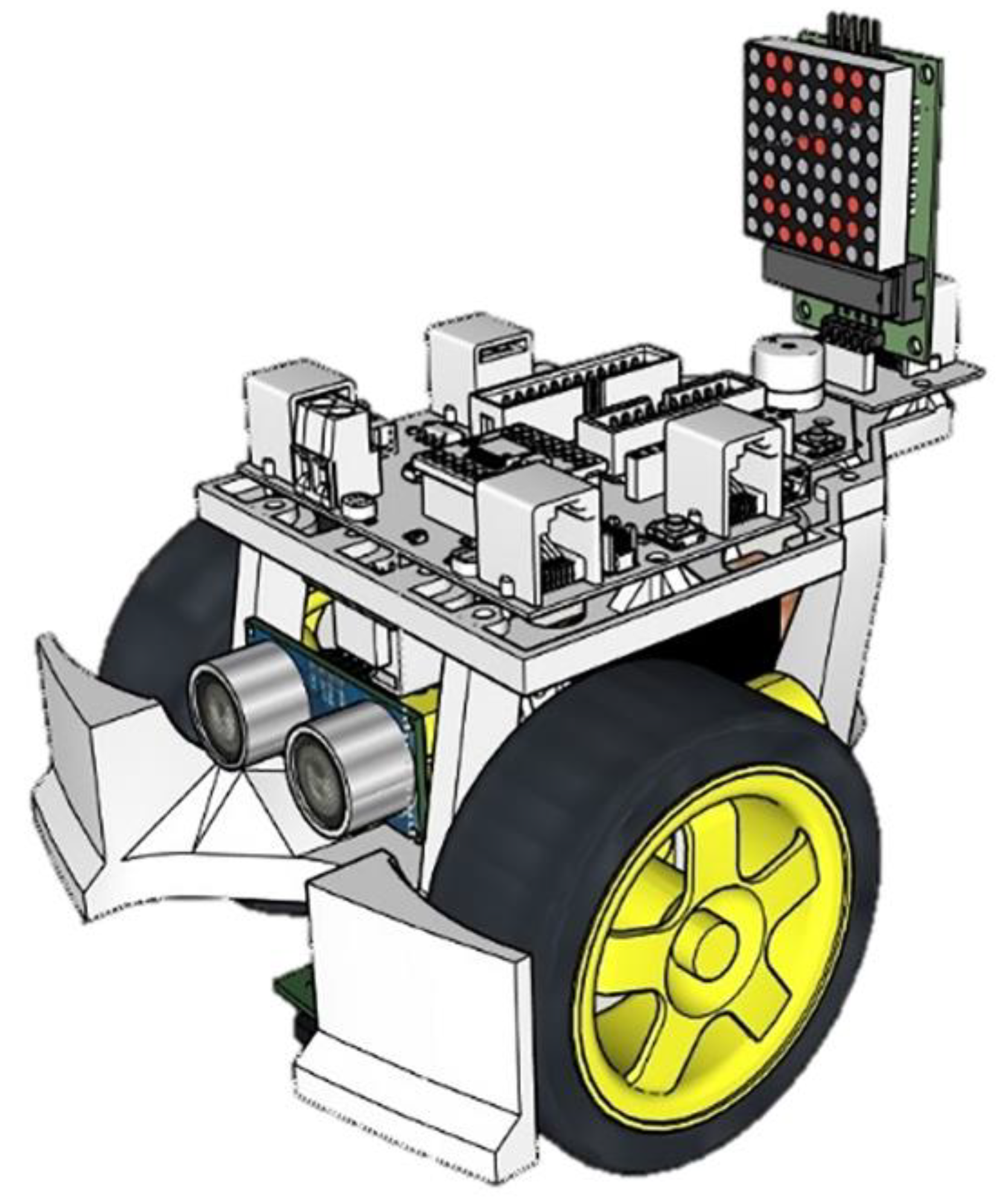
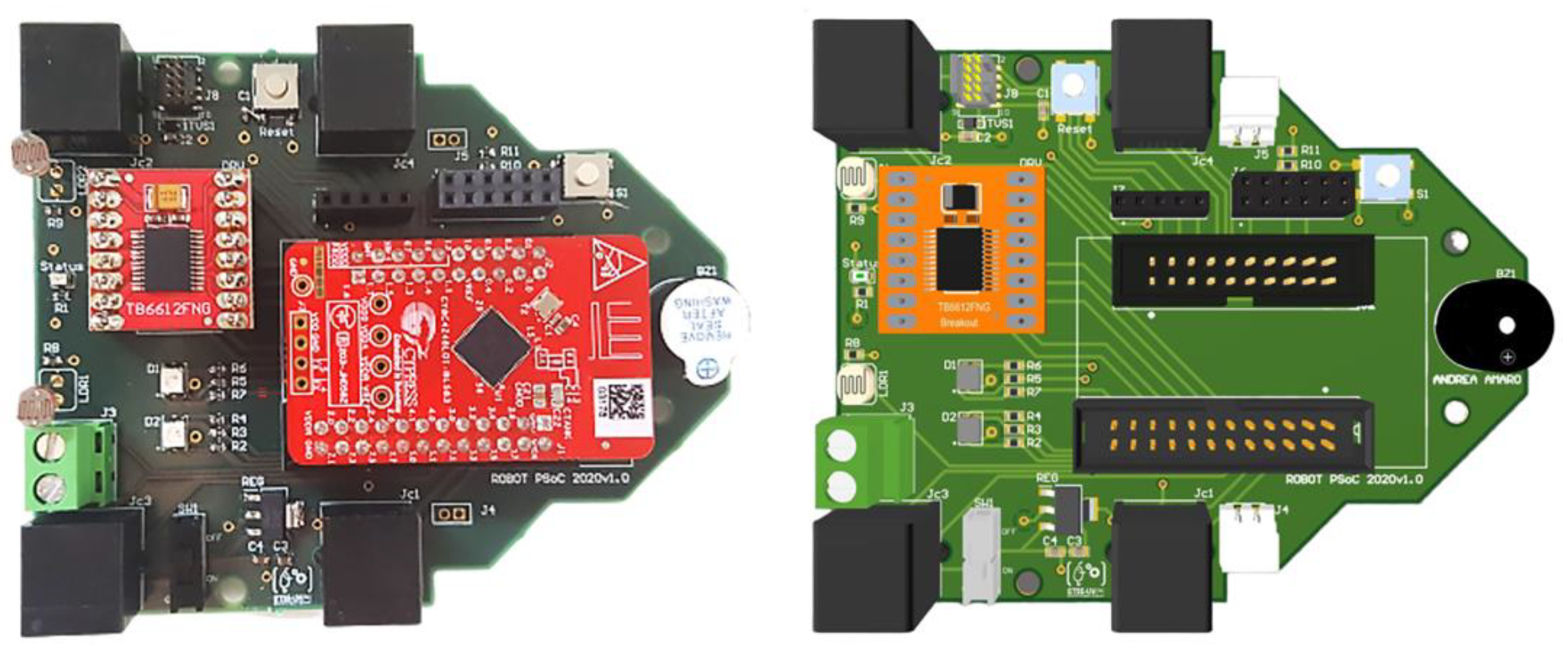
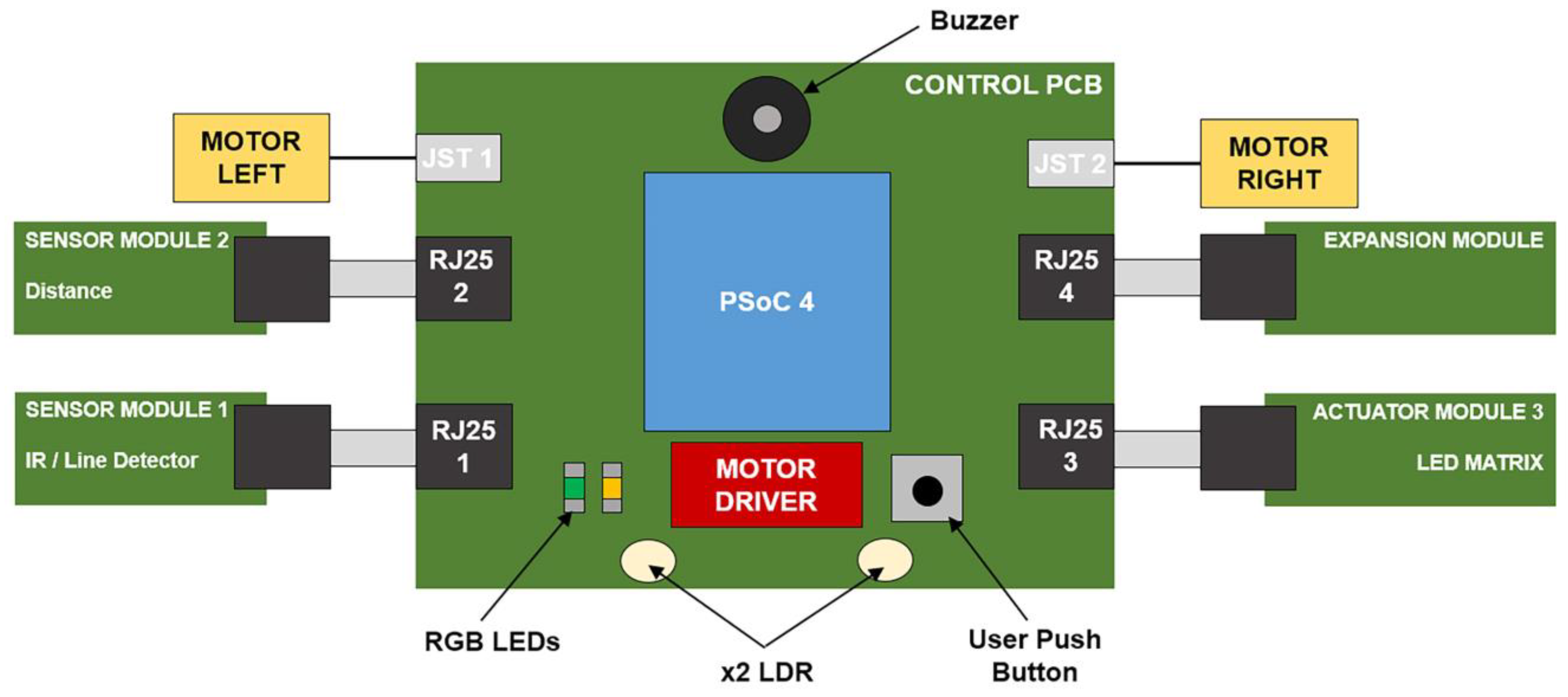
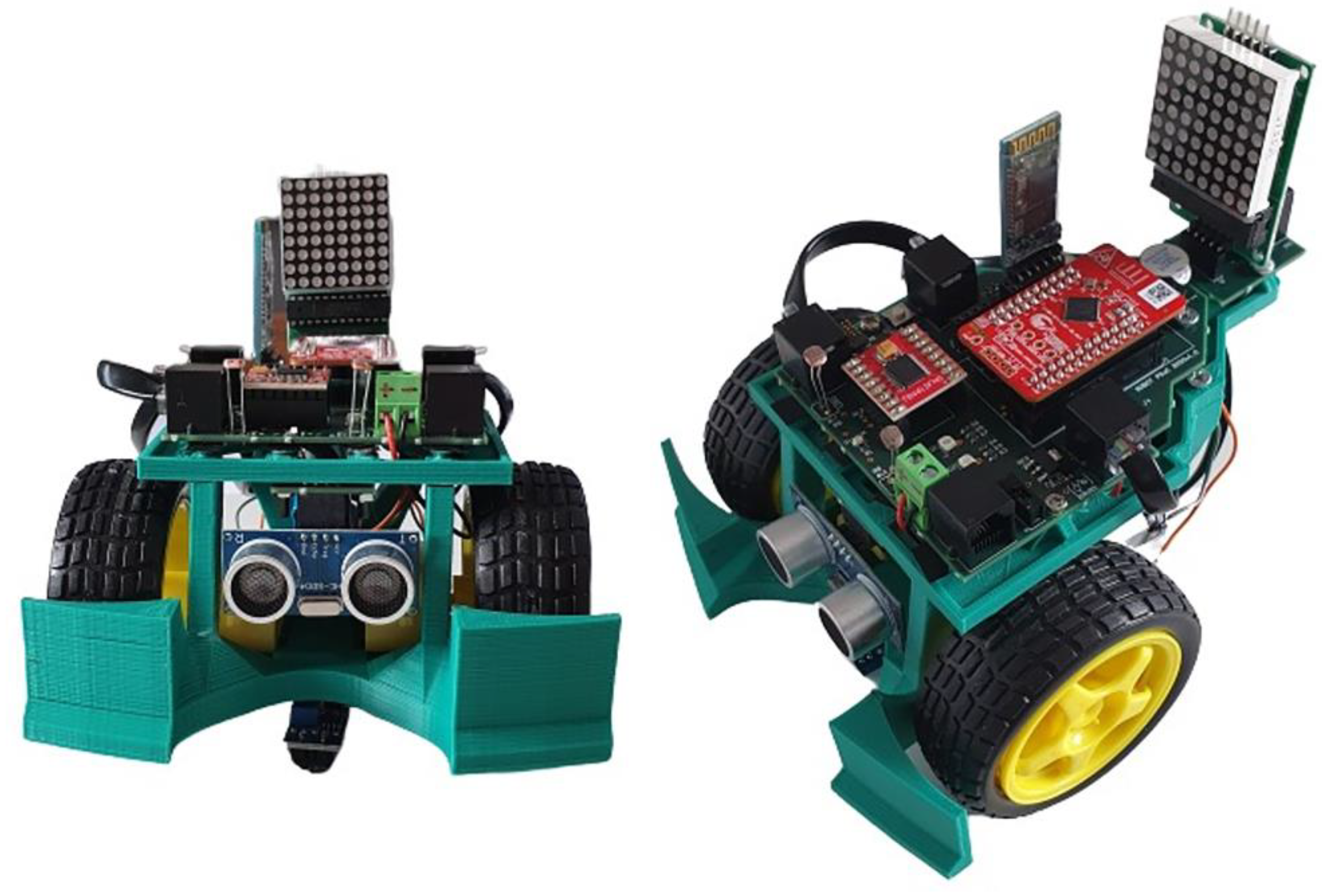
2.2.2. Mobile Robot Platform Based on PSoC
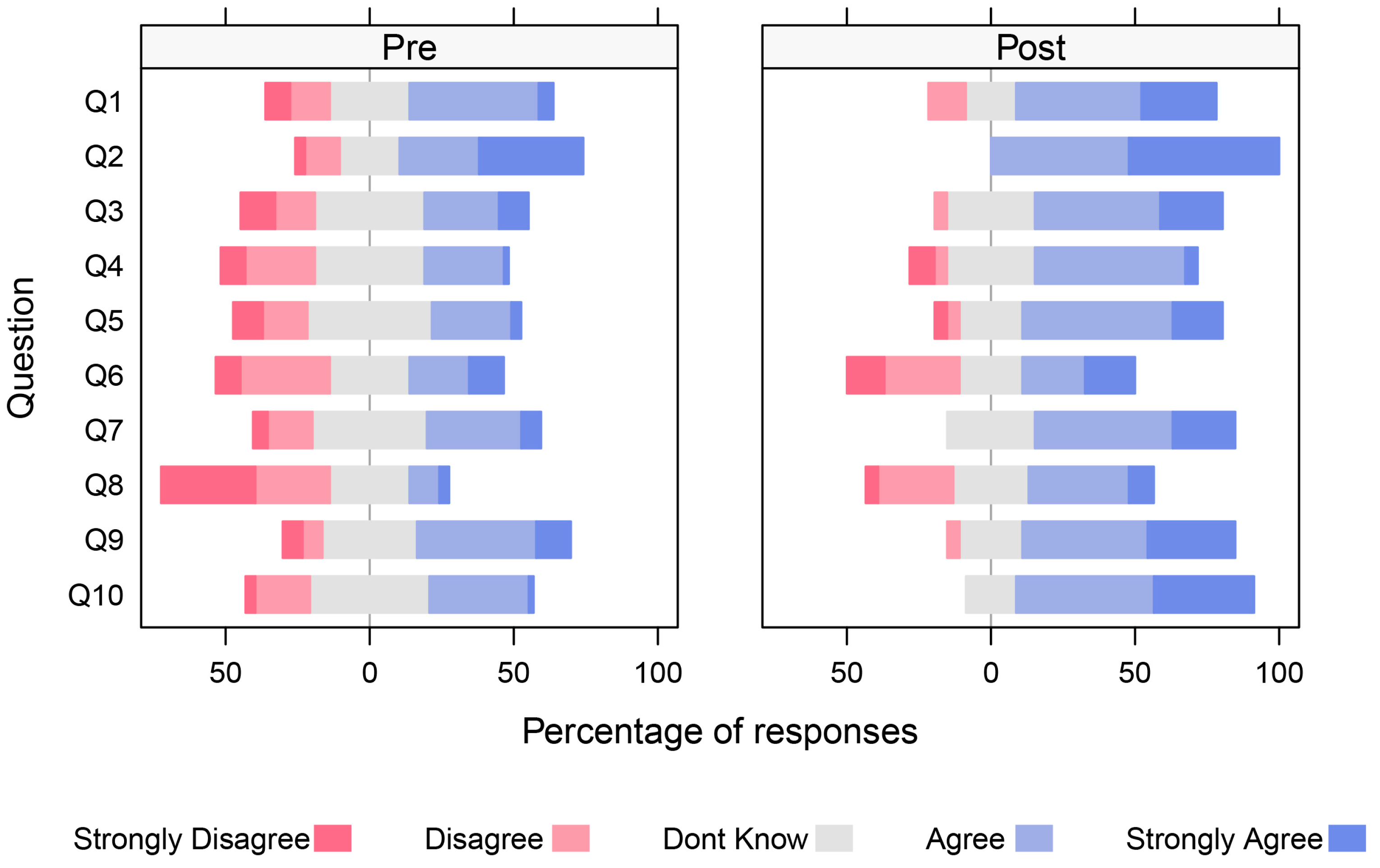
2.3. Assessing the Impact of the Learning Innovation
- Q1. I feel very energized in class.
- Q2. I think the practice activities are relevant and meaningful.
- Q3. It seems like time passes quickly when I am engaged in practice activities.
- Q4. During practice activities, I feel extremely empowered and motivated.
- Q5. I am enthusiastic about the proposed activities.
- Q6. When I engage in activities, I tend to forget about my surroundings and everything happening around me.
- Q7. I find working in class to be quite exciting.
- Q8. I feel like going to class when I am in university.
- Q9. I find great satisfaction in working intensely during class.
- Q10. In general, I feel very satisfied with the activities that are proposed to us in class.
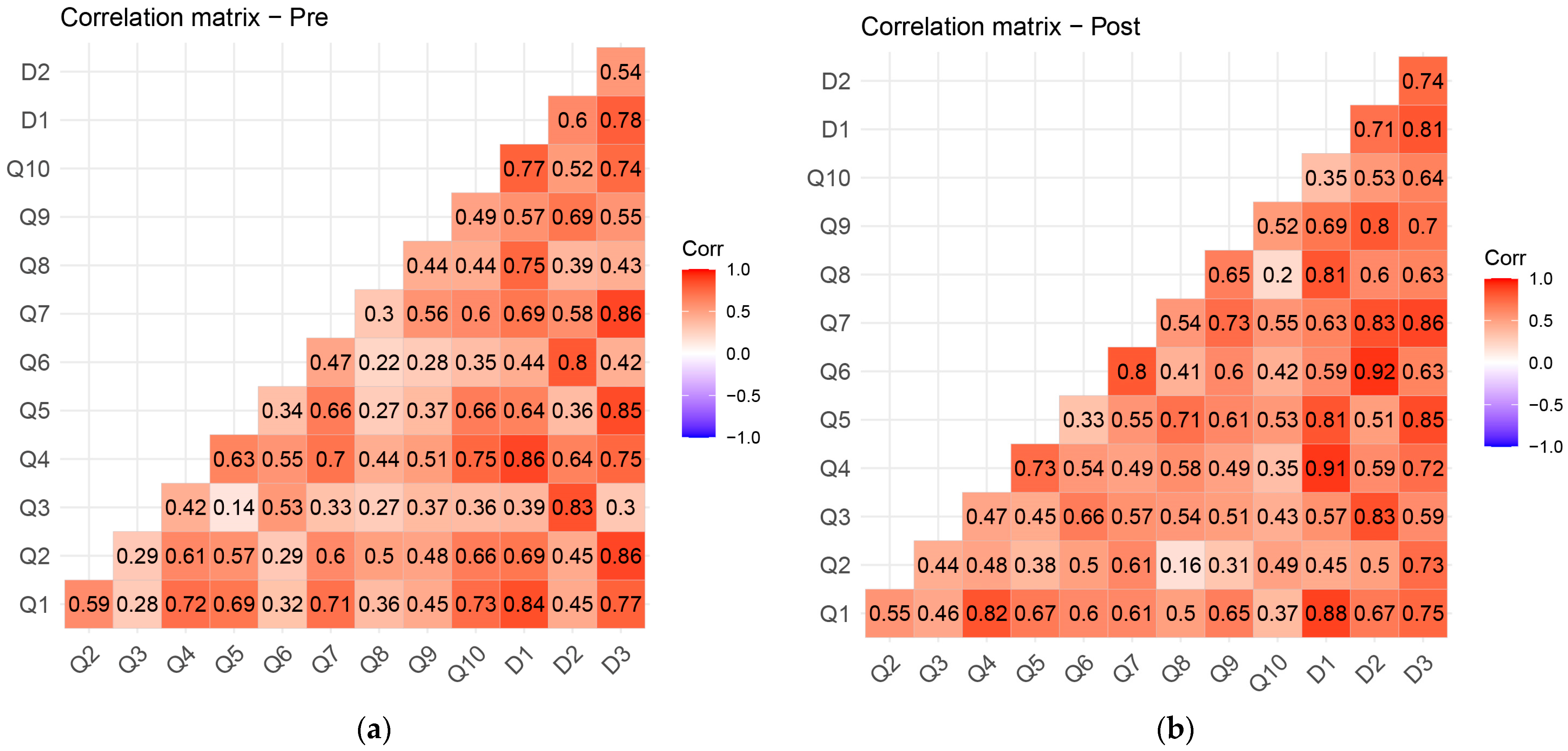
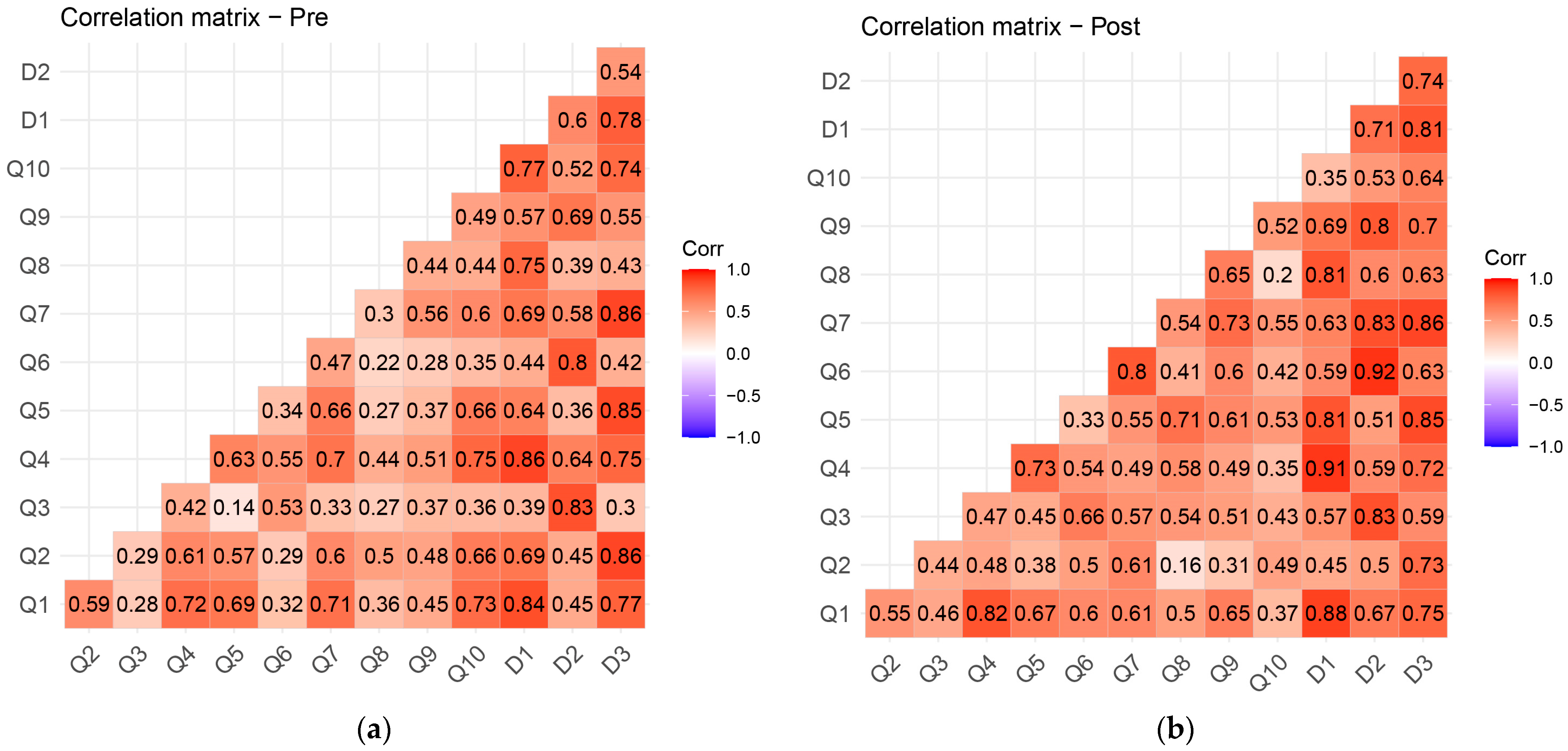
3. Results and Discussion
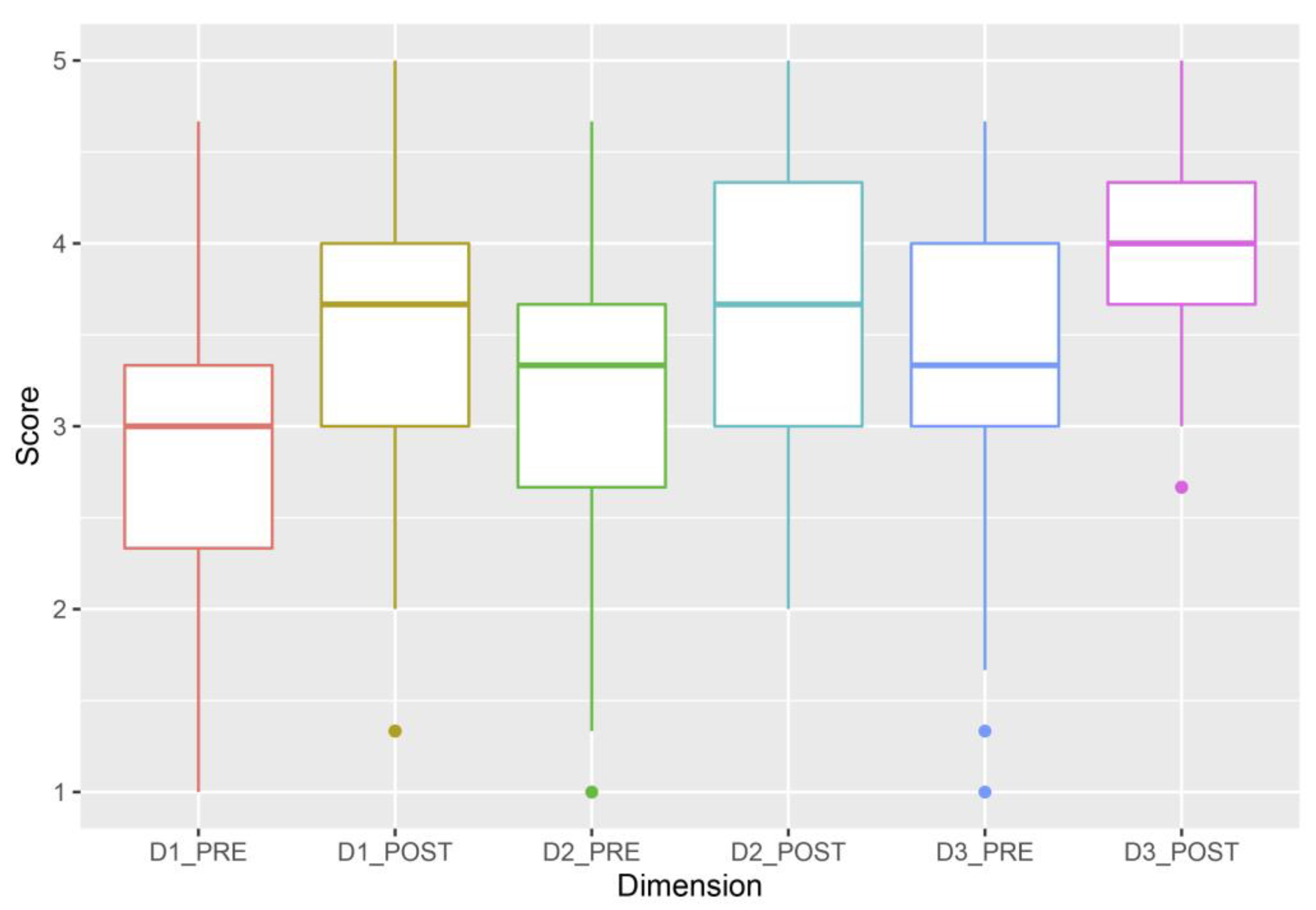
- D1: Q1 (pre-: 0.84, post-: 0.88); Q4 (pre-: 0.86, post-: 0.91), and Q8 (pre-: 0.75, post-: 0.81).
- D2: Q3 (pre-: 0.83, post-: 0.83); Q6 (pre-: 0.80, post-: 0.92), and Q9 (pre-: 0.69, post-: 0.80).
- D3: Q2 (pre-: 0.86, post-: 0.73); Q5 (pre-: 0.85, post-: 0.85), and Q7 (pre-: 0.86, post-: 0.86).
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dewey, J. Experience and Education. Educ. Forum 1986, 50, 241–252. [Google Scholar] [CrossRef]
- Piaget, J. The Construction of Reality in the Child; Ballantine: New York, NY, USA, 1954. [Google Scholar] [CrossRef]
- Kolb, D.A. Experiential Learning: Experience as the Source of Learning and Development; FT Press: Upper Saddle River, NJ, USA, 2014. [Google Scholar]
- Lewin, K. Action research and minority problems. J. Soc. Issues 1946, 2, 34–46. [Google Scholar] [CrossRef]
- Winsett, C.; Foster, C.; Dearing, J.; Burch, G. The Impact of Group Experiential Learning on Student Engagement. Acad. Bus. Res. J. 2016, 3, 7–17. [Google Scholar]
- Hall, A.; Miro, D. A study of student engagement in project-based learning across multiple approaches to STEM education programs. Sch. Sci. Math. 2016, 116, 310–319. [Google Scholar] [CrossRef]
- Benavent, X.; de Ves, E.; Forte, A.; Botella-Mascarell, C.; López-Iñesta, E.; Rueda, S.; Roger, S.; Perez, J.; Portalés, C.; Dura, E.; et al. Girls4STEM: Gender Diversity in STEM for a Sustainable Future. Sustainability 2020, 12, 6051. [Google Scholar] [CrossRef]
- Barak, M.; Dori, Y. Enhancing undergraduate students’ chemistry understanding through project-based learning in an IT environment. Sci. Educ. 2005, 89, 117–139. [Google Scholar] [CrossRef]
- Miller, E.C.; Krajcik, J. Promoting deep learning through project-based learning: A design problem. Discip. Interdiscip. Sci. Educ. Res. 2019, 1, 7. [Google Scholar] [CrossRef]
- Potvin, A.S.; Miller, E.A.; Kuck, R.; Berland, L.K.; Boardman, A.G.; Kavanagh, S.S.; Clark, T.L.; Cheng, B.H. Mapping Enabling Conditions for High-Quality PBL: A Collaboratory Approach. Educ. Sci. 2022, 12, 222. [Google Scholar] [CrossRef]
- Bradberry, L.; De Maio, J. Learning by Doing: The Long-Term Impact of Experiential Learning Programs on Student Success. J. Political Sci. Educ. 2019, 15, 94–111. [Google Scholar] [CrossRef]
- Cui, Y.; Hong, J.C.; Tsai, C.R.; Ye, J.H. How Does Hands-On Making Attitude Predict Epistemic Curiosity and Science, Technology, Engineering, and Mathematics Career Interests? Evidence from an International Exhibition of Young Inventors. Front. Psychol. 2022, 13, 859179. [Google Scholar] [CrossRef] [PubMed]
- Márquez-Ramos, L. Does digitalization in higher education help to bridge the gap between academia and industry? An application to COVID-19. Ind. High. Educ. 2021, 35, 630–637. [Google Scholar] [CrossRef]
- Queiruga-Dios, M.-Á.; López-Iñesta, E.; Diez-Ojeda, M.; Sáiz-Manzanares, M.-C.; Vázquez-Dorrío, J.-B. Implementation of a STEAM Project in Compulsory Secondary Education That Creates Connections with the Environment (Implementación de Un Proyecto STEAM En Educación Secundaria Generando Conexiones Con El Entorno). J. Study Educ. Dev. 2021, 44, 871–908. [Google Scholar] [CrossRef]
- Rosicka, C. Translating STEM Education into Practice; Australian Council for Educational Research: Camberwell, Australia, 2016; Available online: https://research.acer.edu.au/cgi/viewcontent.cgi?article=1010&context=professional_dev (accessed on 30 June 2023).
- Suarez, A.; Garcia-Costa, D.; Martinez, P.A.; Fayos, R.; Amaro, A.; Martos, J. A transversal educational robotic platform for teaching in different education levels. In Proceedings of the INTED2020, Valencia, Spain, 2–4 March 2020; pp. 6032–6040. [Google Scholar] [CrossRef]
- Lombardi, M.M.; Oblinger, D.G. Authentic Learning for the 21st Century: An Overview. Educ. Learn. Initiat. 2007, 1, 1–12. Available online: http://alicechristie.org/classes/530/EduCause.pdf (accessed on 30 June 2023).
- Belpaeme, T.; Kennedy, J.; Ramachandrran, A.; Scassellati, B.; Tanaka, F. Social robots for education: A review. Sci. Robot. 2018, 3, eaa5954. [Google Scholar] [CrossRef]
- Resolution, A. RES/70/1. Transforming Our World: The 2030 Agenda for Sustainable Development; Seventieth United Nations General Assembly: New York, NY, USA, 2015; Available online: https://www.un.org/en/development/desa/population/migration/generalassembly/docs/globalcompact/A_RES_70_1_E.pdf (accessed on 30 June 2023).
- Guenat, S.; Purnell, P.; Davies, Z.G.; Nawrath, M.; Stringer, L.C.; Babu, G.R.; Balasubramanian, M.; Ballantyne, E.E.F.; Bylappa, B.K.; Chen, B.; et al. Meeting sustainable development goals via robotics and autonomous systems. Nat. Commun. 2022, 13, 3559. [Google Scholar] [CrossRef]
- Sotelo, D.; Sotelo, C.; Ramirez-Mendoza, R.A.; López-Guajardo, E.A.; Navarro-Duran, D.; Niño-Juárez, E.; Vargas-Martinez, A. Lab-Tec@Home: A Cost-Effective Kit for Online Control Engineering Education. Electronics 2022, 11, 907. [Google Scholar] [CrossRef]
- Tran, L.Q.; Radcliffe, P.J.; Wang, L. A low budget take-home control engineering laboratory for undergraduate. Int. J. Electr. Eng. Educ. 2019, 59, 158–175. [Google Scholar] [CrossRef]
- Eguchi, A. What is Educational Robotics? Theories behind it and practical implementation. In Proceedings of the Society for Information Technology & Teacher Education International Conference 2010, San Diego, CA, USA, 29 March–2 April 2010; pp. 4006–4014. Available online: https://www.learntechlib.org/primary/p/34007 (accessed on 30 June 2023).
- Penmetcha, M.R. Exploring the Effectiveness of Robotics as a Vehicle for Computational Thinking. Master’s Thesis, Purdue University, West Lafayette, IN, USA, 2012. Available online: https://docs.lib.purdue.edu/dissertations/AAI1529729/ (accessed on 30 June 2023).
- Tobón, S.; Luna-Nemecio, J. Complex thinking and sustainable social development: Validity and reliability of the complex-21 scale. Sustainability 2021, 13, 6591. [Google Scholar] [CrossRef]
- Sotelo, D.; Vázquez-Parra, J.C.; Cruz-Sandoval, M.; Sotelo, C. Lab-Tec@Home: Technological Innovation in Control Engineering Education with Impact on Complex Thinking Competency. Sustainability 2023, 15, 7598. [Google Scholar] [CrossRef]
- Benitti, F.B.V. Exploring the educational potential of robotics in schools: A systematic review. Comput. Educ. 2012, 58, 978–988. [Google Scholar] [CrossRef]
- Kandlhofer, M.; Steinbauer, G. Evaluating the impact of educational robotics on pupils’ technical- and social-skills and science related attitudes. Robot. Auton. Syst. 2016, 75, 679–685. [Google Scholar] [CrossRef]
- Chen, J.; Kolmos, A.; Du, X. Forms of implementation and challenges of PBL in engineering education: A review of literature. Eur. J. Eng. Educ. 2020, 46, 90–115. [Google Scholar] [CrossRef]
- Sanger, P.A.; Ziyatdinova, J. Project based learning: Real world experiential projects creating the 21st century engineer. In Proceedings of the 2014 International Conference on Interactive Collaborative Learning (ICL), Dubai, United Arab Emirates, 3–6 December 2014; pp. 541–544. [Google Scholar] [CrossRef]
- Piaget, J.; Piaget, J. To Understand is to Invent: The Future of Education; Viking Press: New York, NY, USA, 1974; ISBN 0670005770. [Google Scholar]
- Heath, S. Embedded Systems Design; Elsevier: Amsterdam, The Netherlands, 2002. [Google Scholar]
- Abdelfatah, W.F.; Georgy, J.; Iqbal, U.; Noureldin, A. FPGA-Based Real-Time Embedded System for RISS/GPS Integrated Navigation. Sensors 2012, 12, 115–147. [Google Scholar] [CrossRef]
- Lucca, A.V.; Sborz, G.A.M.; Leithardt, V.R.Q.; Beko, M.; Zeferino, C.A.; Parreira, W.D. A Review of Techniques for Implementing Elliptic Curve Point Multiplication on Hardware. J. Sens. Actuator Netw. 2021, 10, 3. [Google Scholar] [CrossRef]
- Alam, T. Blockchain-Based Internet of Things: Review, Current Trends, Applications, and Future Challenges. Computers 2023, 12, 6. [Google Scholar] [CrossRef]
- Samie, F.; Bauer, L.; Henkel, J. IoT technologies for embedded computing: A survey. In Proceedings of the 2016 International Conference on Hardware/Software Codesign and System Synthesis (CODES+ISSS), Pittsburgh, PA, USA, 2–7 October 2016. [Google Scholar] [CrossRef]
- School of Engineering—University of Valencia (ETSE-UV). Available online: https://www.uv.es/uvweb/engineering/en/school-engineering-1285845344131.html (accessed on 30 June 2023).
- Degree in Telecommunications Electronic Engineering—University of Valencia. Available online: https://www.uv.es/degree/telecommunications-electronic-engineering (accessed on 30 June 2023).
- Digital Electronic Systems (SED-II) Subject—University of Valencia. Available online: https://go.uv.es/HXup974 (accessed on 30 June 2023).
- Integrated Telecommunication Systems (SIT) Subject—University of Valencia. Available online: https://go.uv.es/7QC0s2N (accessed on 30 June 2023).
- Ibarra-Sáiz, M.S.; Rodríguez-Gómez, G.; Boud, D. Developing student competence through peer assessment: The role of feedback, self-regulation and evaluative judgement. High. Educ. 2020, 80, 137–156. [Google Scholar] [CrossRef]
- Loureiro, P.; Gomes, M.J. Online Peer Assessment for Learning: Findings from Higher Education Students. Educ. Sci. 2023, 13, 253. [Google Scholar] [CrossRef]
- PSoC 4: 4200_BLE Family Datasheet—Infineon. Available online: https://www.cypress.com/file/416486/ (accessed on 30 June 2023).
- Getting Started with PSoC 4—Infineon. Available online: https://www.cypress.com/file/46106/ (accessed on 30 June 2023).
- García-Ros, R.; Pérez-González, F.; Tomás, J.M.; Fernández, I. The schoolwork engagement inventory: Factorial structure, measurement invariance by gender and educational level, and convergent validity in secondary education (12–18 Years). J. Psychoeduc. Assess 2018, 36, 588–603. [Google Scholar] [CrossRef]
- Botella, C.; Soriano-Asensi, A.; Segura-Garcia, J.; Pérez, J.; Felici-Castell, S.; Navarro-Camba, E.A.; Montagud, M. Incorporando dispositivos de radio definida por software en la materia de Comunicaciones Digitales: Del grupo piloto a la gran clase. In Proceedings of the IN-RED 2020: VI Congreso de Innovación Educativa y Docencia en Red, Valencia, Spain, 16–17 July 2020; pp. 95–103. [Google Scholar] [CrossRef]
- Robinson, J.P.; Shaver, P.R.; Wrightsman, L.S. Criteria for Scale Selection and Evaluation, in Measures of Personality and Social Psychological Attitude; Academic Press: San Diego, CA, USA, 1991. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element | Units | Cost per Unit (EUR) | Cost (EUR) |
|---|---|---|---|
| PSoC 4 (CY8CKIT-142) | 1 | 9.09 | 9.09 |
| PCBs (control unit, sensors, and actuators) | 1 | 10.40 | 10.40 |
| Ultrasonic sensor | 1 | 1.59 | 1.59 |
| IR sensor | 1 | 1.85 | 1.85 |
| LDR sensor | 2 | 0.15 | 0.30 |
| LED matrix | 1 | 2.95 | 2.95 |
| Wheels (×2) | 1 | 1.49 | 1.49 |
| DC motor | 2 | 1.49 | 3.98 |
| Freewheel | 1 | 1.39 | 1.39 |
| Components, connectors, and structure | 1 | 10.50 | 10.50 |
| Motor driver | 1 | 2.45 | 2.45 |
| Total: | 45.99 € |
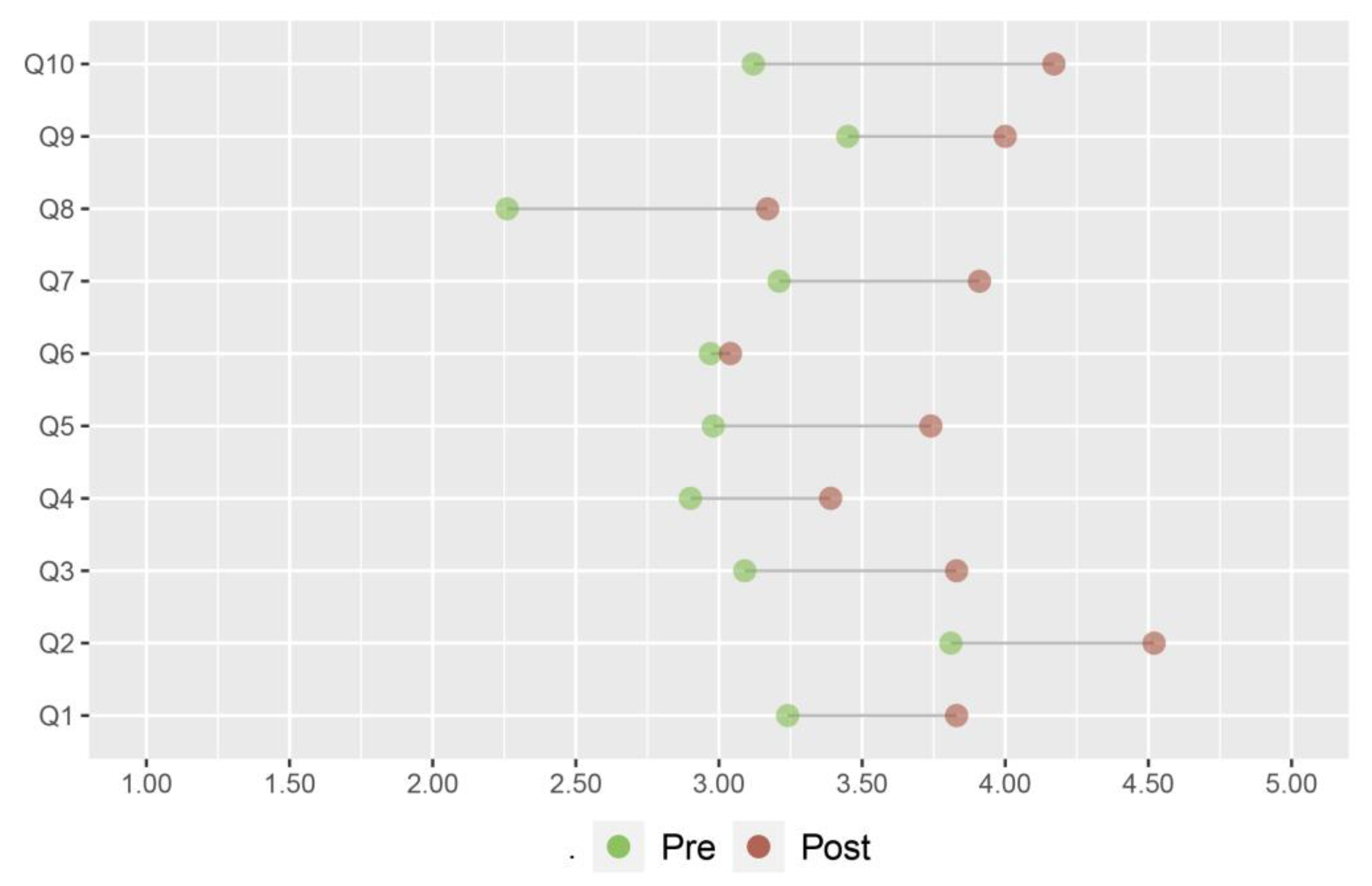
| Group | Q1 | Q2 | Q3 | Q4 | Q5 |
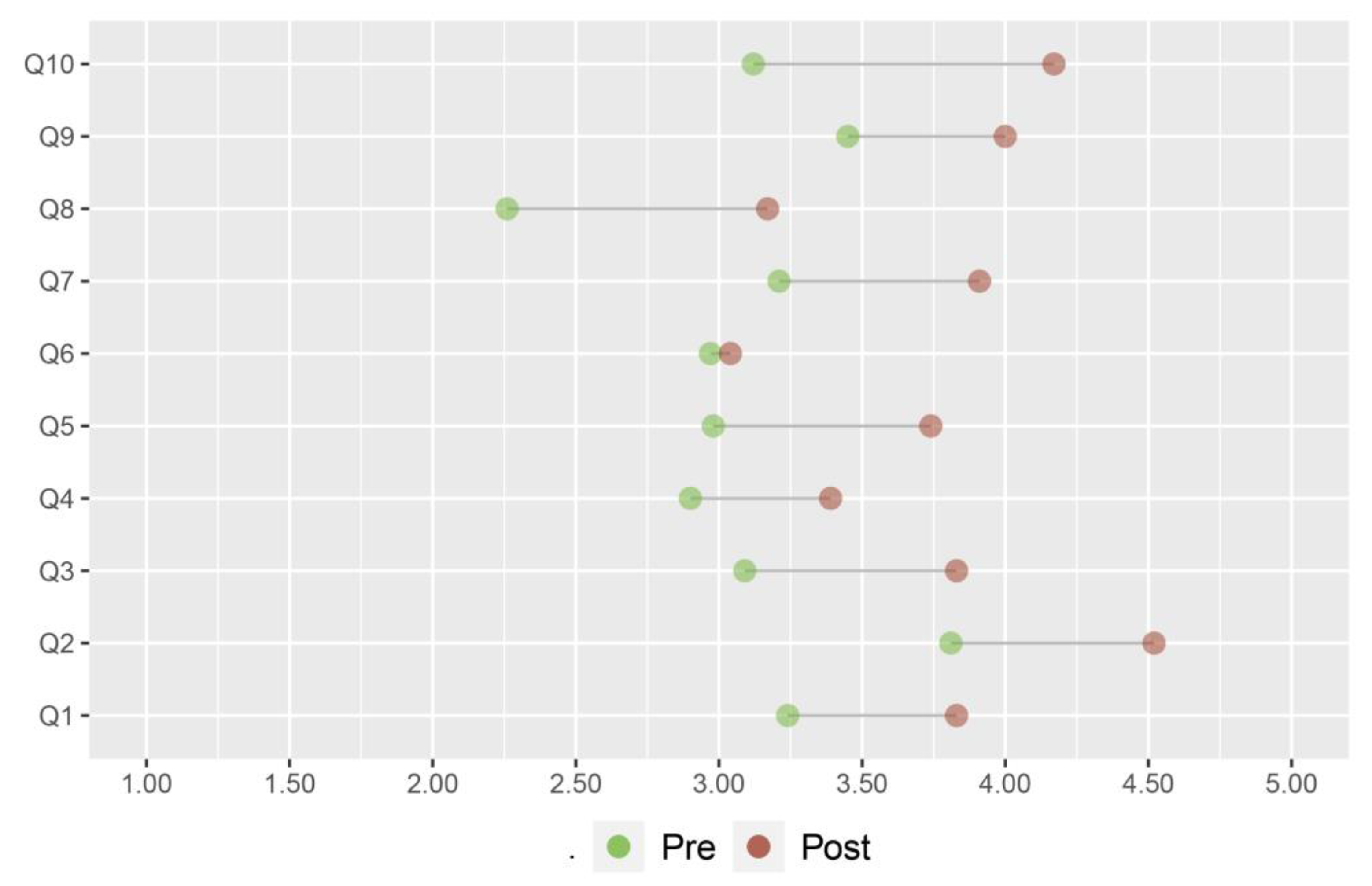
| Pre- | 3.24 (1.05) | 3.81 (1.16) | 3.09 (1.14) | 2.90 (0.97) | 2.98 (1.00) |
| Post- | 3.83 (0.97) | 4.52 (0.50) | 3.83 (0.82) | 3.39 (0.97) | 3.74 (0.95) |
| Diff. | 0.58 | 0.71 | 0.74 | 0.49 | 0.76 |
| Group | Q6 | Q7 | Q8 | Q9 | Q10 |
| Pre- | 2.97 (1.17) | 3.21 (0.97) | 2.26 (1.13) | 3.45 (1.03) | 3.12 (0.86) |
| Post- | 3.04 (1.31) | 3.91 (0.72) | 3.17 (1.06) | 4.00 (0.84) | 4.17 (0.71) |
| Diff. | 0.078 | 0.71 | 0.92 | 0.55 | 1.05 |
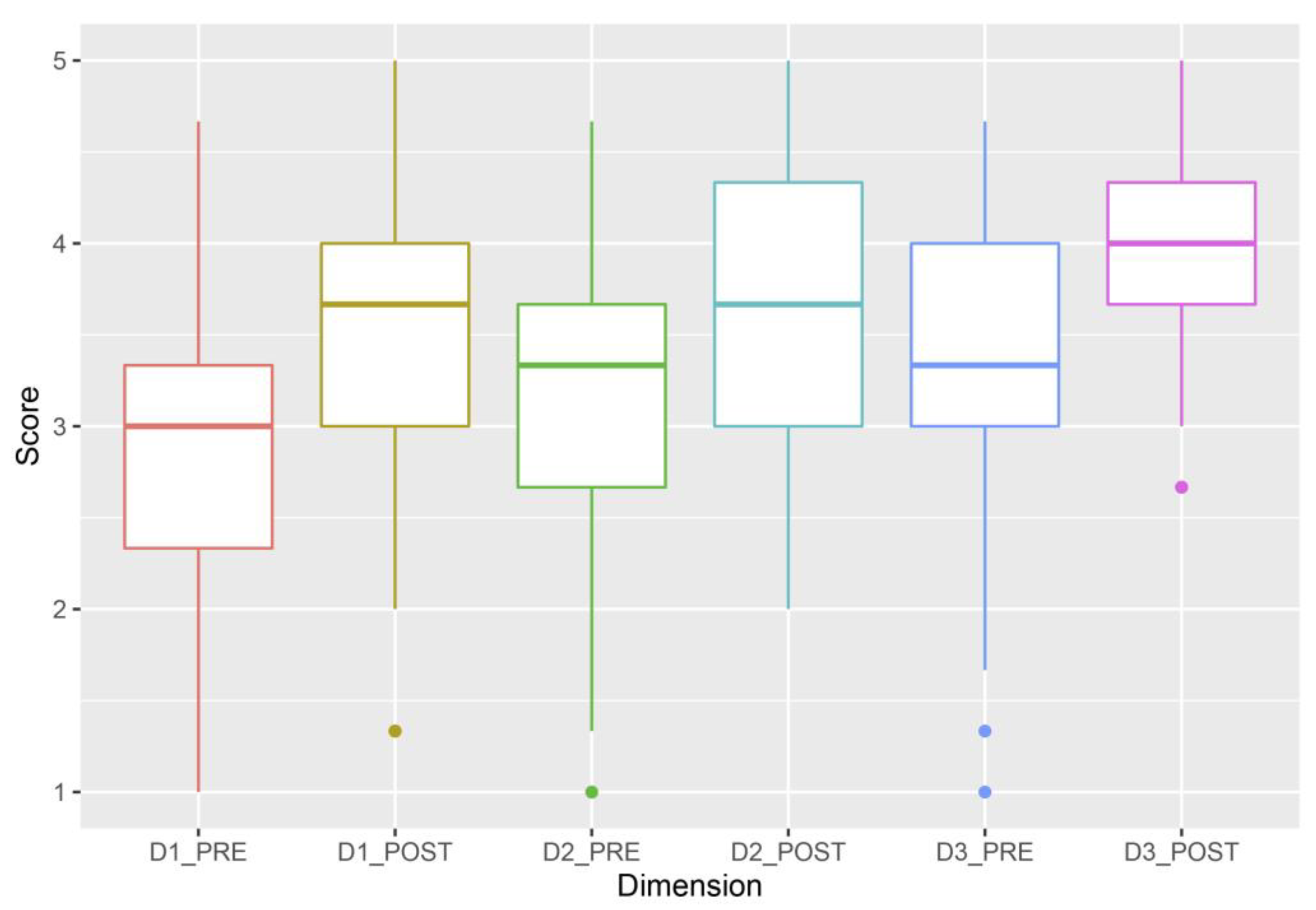
| Group | Energy (D1) | Absorption (D2) | Dedication (D3) |
|---|---|---|---|
| Pre- | 2.80 (0.86) | 3.17 (0.86) | 3.33 (0.90) |
| Post- | 3.46 (0.87) | 3.62 (0.85) | 4.06 (0.60) |
| Diff. | 0.66 | 0.45 | 0.73 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Suarez, A.; García-Costa, D.; Perez, J.; López-Iñesta, E.; Grimaldo, F.; Torres, J. Hands-on Learning: Assessing the Impact of a Mobile Robot Platform in Engineering Learning Environments. Sustainability 2023, 15, 13717. https://doi.org/10.3390/su151813717
Suarez A, García-Costa D, Perez J, López-Iñesta E, Grimaldo F, Torres J. Hands-on Learning: Assessing the Impact of a Mobile Robot Platform in Engineering Learning Environments. Sustainability. 2023; 15(18):13717. https://doi.org/10.3390/su151813717
Chicago/Turabian StyleSuarez, Adrian, Daniel García-Costa, Joaquin Perez, Emilia López-Iñesta, Francisco Grimaldo, and Jose Torres. 2023. "Hands-on Learning: Assessing the Impact of a Mobile Robot Platform in Engineering Learning Environments" Sustainability 15, no. 18: 13717. https://doi.org/10.3390/su151813717
APA StyleSuarez, A., García-Costa, D., Perez, J., López-Iñesta, E., Grimaldo, F., & Torres, J. (2023). Hands-on Learning: Assessing the Impact of a Mobile Robot Platform in Engineering Learning Environments. Sustainability, 15(18), 13717. https://doi.org/10.3390/su151813717