
The Construction of an Evaluation Index System for Assistive Teaching Robots Aimed at Sustainable Learning


Abstract
:1. Introduction
2. Literature Review
2.1. Current Status of Research
2.2. The Functional Evaluation Index System of Assistive Teaching Robots
2.2.1. System Structure (X1)
2.2.2. Appearance Interface (X2)
2.2.3. Teaching Function (X3)
2.2.4. Auxiliary Support (X4)
3. Methods
3.1. The DEMATEL Method
3.2. Getting ANP Weights Using the DEMATEL Method
4. Data Analysis
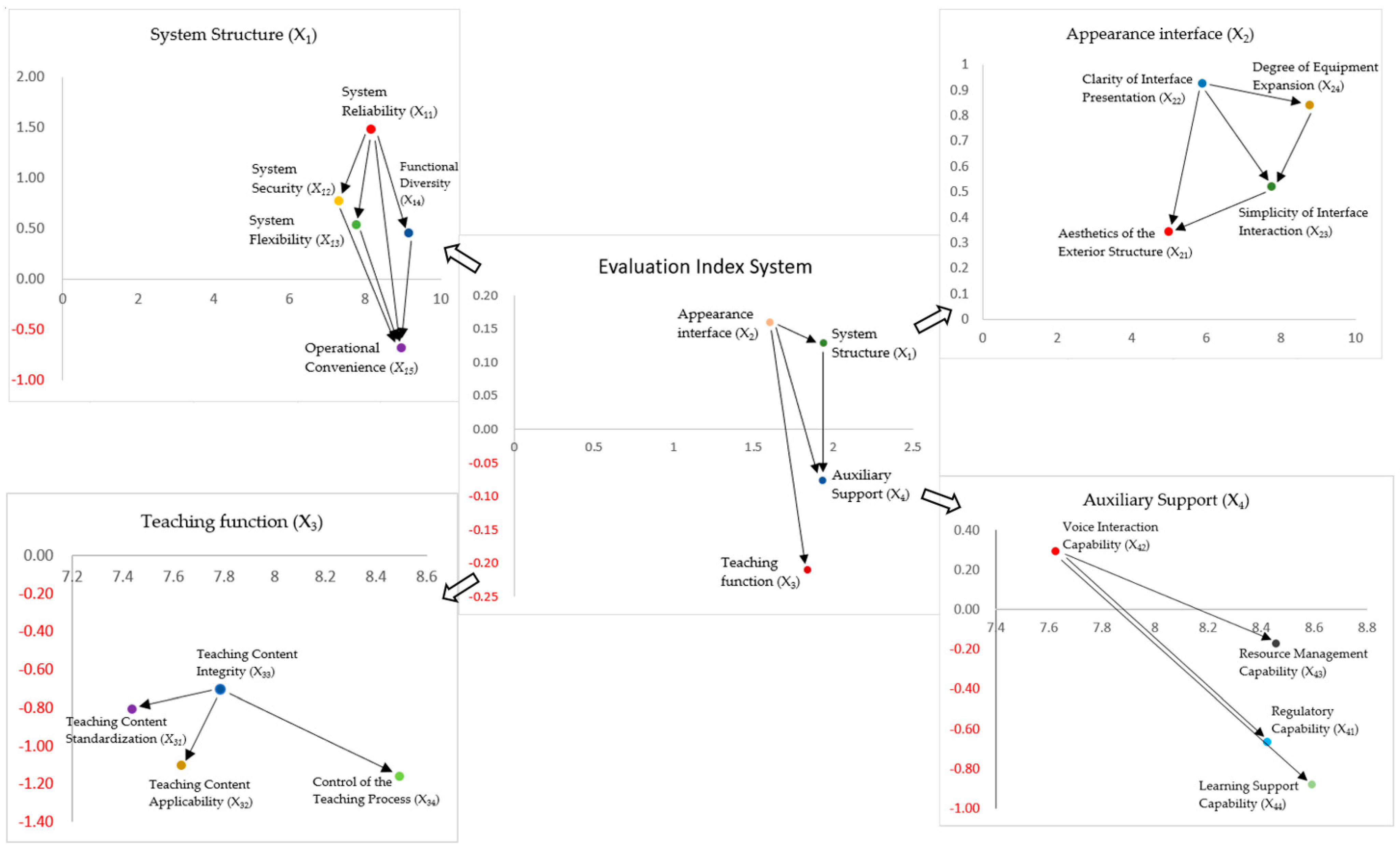
4.1. Relationship between Metric Dimensions and Indicators
4.2. Identification and Statistics of Functional Evaluation Indicators for Assistive Teaching Robots
5. Discussion
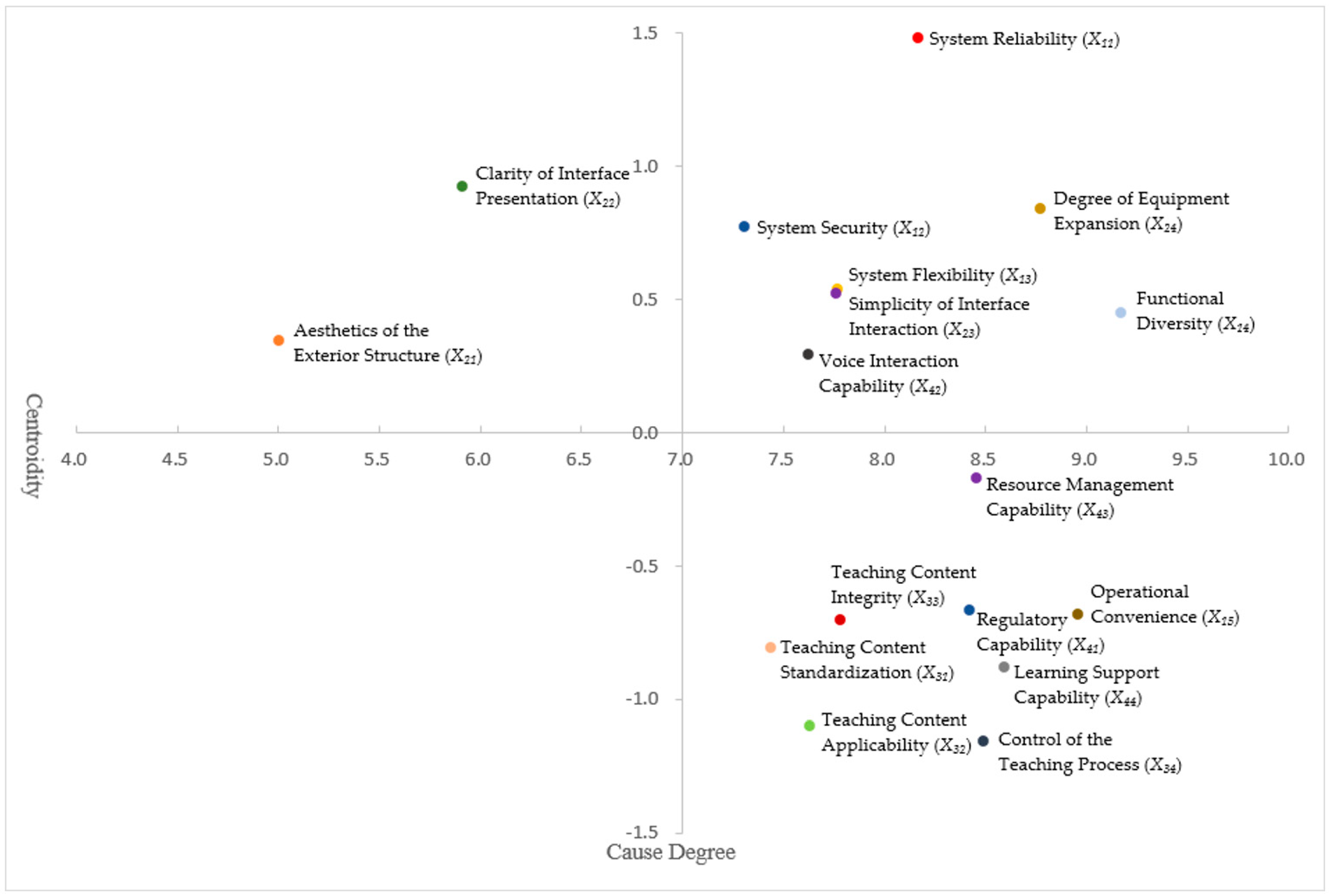
5.1. Cause Factor Analysis
5.2. Outcome Factor Analysis
5.3. Importance Analysis of Influencing Factors
5.4. Theoretical and Practical Implications
6. Conclusions
6.1. Suggestions for Future Research and Practice
6.1.1. Enrich the Teaching Resource Library and Enhance the Ability to Assist in Teaching
6.1.2. Combine Core Technologies and Facilitate Supportive Support
6.1.3. Pay Attention to the Design of Robot Appearance and Interaction Interface
6.2. Limitations
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
| Level of Influence | X11 | X12 | X13 | X14 | X15 | X21 | X22 | X23 | X24 | X31 | X32 | X33 | X34 | X41 | X42 | X43 | X44 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| X11 | |||||||||||||||||
| X12 | |||||||||||||||||
| X13 | |||||||||||||||||
| X14 | |||||||||||||||||
| X15 | |||||||||||||||||
| X21 | |||||||||||||||||
| X22 | |||||||||||||||||
| X23 | |||||||||||||||||
| X24 | |||||||||||||||||
| X31 | |||||||||||||||||
| X32 | |||||||||||||||||
| X33 | |||||||||||||||||
| X34 | |||||||||||||||||
| X41 | |||||||||||||||||
| X42 | |||||||||||||||||
| X43 | |||||||||||||||||
| X44 |
References
- Dwivedi, Y.K.; Kshetri, N.; Hughes, L.; Slade, E.L.; Jeyaraj, A.; Kar, A.K.; Baabdullah, A.M.; Koohang, A.; Raghavan, V.; Ahuja, M.; et al. “So what if ChatGPT wrote it?” Multidisciplinary perspectives on opportunities, challenges, and implications of generative conversational AI for research, practice, and policy. Int. J. Inf. Manag. 2023, 71, 102642. [Google Scholar] [CrossRef]
- Ghatrehsamani, S.; Jha, G.; Dutta, W.; Molaei, F.; Nazrul, F.; Fortin, M.; Bansal, S.; Debangshi, U.; Neupane, J. Artificial Intelligence Tools and Techniques to Combat Herbicide Resistant Weeds—A Review. Sustainability 2023, 15, 1843. [Google Scholar] [CrossRef]
- Lu, V.N.; Wirtz, J.; Kunz, W.H.; Paluch, S.; Gruber, T.; Martins, A.; Patterson, P.G. Service robots, customers, and service employees: What can we learn from the academic literature and where are the gaps? J. Serv. Theory Pract. 2020, 30, 361–391. [Google Scholar] [CrossRef]
- Hwang, G.J.; Xie, H.; Wah, B.W.; Gašević, D. Vision, challenges, roles and research issues of Artificial Intelligence in Education. Comput. Educ. Artif. Intell. 2020, 1, 100001. [Google Scholar] [CrossRef]
- Hsieh, Y.Z.; Lin, S.S.; Luo, Y.C.; Jeng, Y.L.; Tan, S.W.; Chen, C.R.; Chiang, P.Y. ARCS-assisted teaching robots based on anticipatory computing and emotional big data for improving sustainable learning efficiency and motivation. Sustainability 2020, 12, 5605. [Google Scholar] [CrossRef]
- Chen, Y.L.; Hsu, C.C.; Lin, C.Y.; Hsu, H.H. Robot-assisted language learning: Integrating artificial intelligence and virtual reality into English tour guide practice. Educ. Sci. 2022, 12, 437. [Google Scholar] [CrossRef]
- Touretzky, D.S.; Gardner-McCune, C. Calypso for Cozmo: Robotic AI for everyone. In Proceedings of the 49th ACM Technical Symposium on Computer Science Education, Baltimore, MD, USA, 21–24 February 2018; p. 1110. [Google Scholar]
- Chassignol, M.; Khoroshavin, A.; Klimova, A.; Bilyatdinova, A. Artificial Intelligence trends in education: A narrative overview. Procedia Comput. Sci. 2018, 136, 16–24. [Google Scholar] [CrossRef]
- Khan, M.A.; Khojah, M.; Vivek. Artificial intelligence and big data: The advent of new pedagogy in the adaptive e-learning system in the higher educational institutions of Saudi Arabia. Educ. Res. Int. 2022, 2022, 1263555. [Google Scholar] [CrossRef]
- Woo, H.; LeTendre, G.K.; Pham-Shouse, T.; Xiong, Y. The use of social robots in classrooms: A review of field-based studies. Educ. Res. Rev. 2021, 33, 100388. [Google Scholar] [CrossRef]
- Papadopoulos, I.; Lazzarino, R.; Miah, S.; Weaver, T.; Thomas, B.; Koulouglioti, C. A systematic review of the literature regarding socially assistive robots in pre-tertiary education. Comput. Educ. 2020, 155, 103924. [Google Scholar] [CrossRef]
- Huang, S. Design and Development of Educational Robot Teaching Resources Using Artificial Intelligence Technology. Int. J. Emerg. Technol. Learn. 2021, 15, 116–129. [Google Scholar] [CrossRef]
- Kühnlenz, K.; Sosnowski, S.; Buss, M. Impact of animal-like features on emotion expression of robot head eddie. Adv. Robot. 2010, 24, 1239–1255. [Google Scholar] [CrossRef]
- Shaner, D.L.; Beckie, H.J. The future for weed control and technology. Pest Manag. Sci. 2014, 70, 1329–1339. [Google Scholar] [CrossRef]
- Levitt, T. The globalization of markets. McKinsey Q. 1983, 2, 69–81. [Google Scholar]
- Hiller, J.; Lipson, H. Automatic design and manufacture of soft robots. IEEE Trans. Robot. 2011, 28, 457–466. [Google Scholar] [CrossRef]
- Kessler, G. Technology and the future of language teaching. Foreign Lang. Ann. 2018, 51, 205–218. [Google Scholar] [CrossRef]
- Tzafestas, C.S.; Palaiologou, N.; Alifragis, M. Virtual and remote robotic laboratory: Comparative experimental evaluation. IEEE Trans. Educ. 2006, 49, 360–369. [Google Scholar] [CrossRef]
- Lin, Y.; Qu, Q.; Lin, Y.; He, J.; Zhang, Q.; Wang, C.; Jiang, Z.; Guo, F.; Jia, J. Customizing robot-assisted passive neurorehabilitation exercise based on teaching training mechanism. BioMed Res. Int. 2021, 2021, 9972560. [Google Scholar] [CrossRef] [PubMed]
- Hsu, C.C.; Liou, J.J.; Chuang, Y.C. Integrating DANP and modified grey relation theory for the selection of an outsourcing provider. Expert Syst. Appl. 2013, 40, 2297–2304. [Google Scholar] [CrossRef]
- Huang, C.N.; Liou, J.J.; Chuang, Y.C. A method for exploring the interdependencies and importance of critical infrastructures. Knowl.-Based Syst. 2014, 55, 66–74. [Google Scholar] [CrossRef]
- Hung, Y.H.; Huang, T.L.; Hsieh, J.C.; Tsuei, H.J.; Cheng, C.C.; Tzeng, G.H. Online reputation management for improving marketing by using a hybrid MCDM model. Knowl.-Based Syst. 2012, 35, 87–93. [Google Scholar] [CrossRef]
- Crompton, H.; Gregory, K.; Burke, D. Humanoid robots supporting children’s learning in an early childhood setting. Br. J. Educ. Technol. 2018, 49, 911–927. [Google Scholar] [CrossRef]
- Zhexenova, Z.; Amirova, A.; Abdikarimova, M.; Kudaibergenov, K.; Baimakhan, N.; Tleubayev, B.; Asselborn, T.; Johal, W.; Dillenbourg, P.; CohenMiller, A.; et al. A comparison of social robot to tablet and teacher in a new script learning context. Front. Robot. AI 2020, 7, 99. [Google Scholar] [CrossRef] [PubMed]
- Hashimoto, T.; Kato, N.; Kobayashi, H. Development of educational system with the android robot SAYA and evaluation. Int. J. Adv. Robot. Syst. 2011, 8, 28. [Google Scholar] [CrossRef]
- Billard, A.; Kragic, D. Trends and challenges in robot manipulation. Science 2019, 364, eaat8414. [Google Scholar] [CrossRef] [PubMed]
- Cheng, Y.W.; Sun, P.C.; Chen, N.S. The essential applications of educational robot: Requirement analysis from the perspectives of experts, researchers, and instructors. Comput. Educ. 2018, 126, 399–416. [Google Scholar] [CrossRef]
- Dias, M.B.; Mills-Tettey, G.A.; Nanayakkara, T. Robotics, education, and sustainable development. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 4248–4253. [Google Scholar]
- Alam, A. Employing adaptive learning and intelligent tutoring robots for virtual classrooms and smart campuses: Reforming education in the age of artificial intelligence. In Advanced Computing and Intelligent Technologies: Proceedings of ICACIT 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 395–406. [Google Scholar]
- Belpaeme, T.; Kennedy, J.; Ramachandran, A.; Scassellati, B.; Tanaka, F. Social robots for education: A review. Sci. Robot. 2018, 3, eaat5954. [Google Scholar] [CrossRef]
- Nugent, G.; Barker, B.; Grandgenett, N.; Adamchuk, V.I. Impact of robotics and geospatial technology interventions on youth STEM learning and attitudes. J. Res. Technol. Educ. 2010, 42, 391–408. [Google Scholar] [CrossRef]
- Chen, L.; Chen, P.; Lin, Z. Artificial intelligence in education: A review. IEEE Access. 2020, 8, 75264–75278. [Google Scholar] [CrossRef]
- Pan, Y. Heading toward artificial intelligence 2.0. Engineering 2016, 2, 409–413. [Google Scholar] [CrossRef]
- Peng, S.D. On Robotics Education (above). E-Educ. Res. 2002, 6, 3–7. [Google Scholar] [CrossRef]
- Alimisis, D. Educational robotics: Open questions and new challenges. Themes Sci. Technol. Educ. 2013, 6, 63–71. [Google Scholar]
- Mitnik, R.; Recabarren, M.; Nussbaum, M.; Soto, A. Collaborative robotic instruction: A graph teaching experience. Comput. Educ. 2009, 53, 330–342. [Google Scholar] [CrossRef]
- Scaradozzi, D.; Screpanti, L.; Cesaretti, L. Towards a definition of educational robotics: A classification of tools, experiences and assessments. In Smart Learning with Educational Robotics: Using Robots to Scaffold Learning Outcomes; Springer: Berlin/Heidelberg, Germany, 2019; pp. 63–92. [Google Scholar]
- Cooney, M.; Leister, W. Using the engagement profile to design an engaging robotic teaching assistant for students. Robotics 2019, 8, 21. [Google Scholar] [CrossRef]
- Robaczewski, A.; Bouchard, J.; Bouchard, K.; Gaboury, S. Socially assistive robots: The specific case of the NAO. Int. J. Soc. Robot. 2021, 13, 795–831. [Google Scholar] [CrossRef]
- Verner, I.M.; Polishuk, A.; Krayner, N. Science class with RoboThespian: Using a robot teacher to make science fun and engage students. IEEE Robot. Autom. Mag. 2016, 23, 74–80. [Google Scholar] [CrossRef]
- Costa, S.; Brunete, A.; Bae, B.C.; Mavridis, N. Emotional storytelling using virtual and robotic agents. Int. J. Hum. Robot. 2018, 15, 1850006. [Google Scholar] [CrossRef]
- Garrison, D.R. Critical thinking and adult education: A conceptual model for developing critical thinking in adult learners. Int. J. Lifelong Educ. 1991, 10, 287–303. [Google Scholar] [CrossRef]
- Sharkey, A.J. Should we welcome robot teachers? Ethics Inf. Technol. 2016, 18, 283–297. [Google Scholar] [CrossRef]
- Smakman, M.; Berket, J.; Konijn, E.A. The impact of social robots in education: Moral considerations of dutch educational policymakers. In Proceedings of the 2020 29th IEEE International Conference on Robot and Human Interactive Communication, Naples, Italy, 31 August–4 September 2020; pp. 647–652. [Google Scholar]
- Murdoch-Eaton, D.; Whittle, S. Generic skills in medical education: Developing the tools for successful lifelong learning. Med. Educ. 2012, 46, 120–128. [Google Scholar] [CrossRef]
- Drigas, A.; Papanastasiou, G.; Skianis, C. The School of the Future: The Role of Digital Technologies, Metacognition and Emotional Intelligence. Int. J. Emerg. Technol. Learn. 2023, 18, 65. [Google Scholar] [CrossRef]
- Ahmed, H.; La, H.M. Education-robotics symbiosis: An evaluation of challenges and proposed recommendations. In Proceedings of the 2019 IEEE Integrated STEM Education Conference (ISEC), Princeton, NJ, USA, 16 March 2019; pp. 222–229. [Google Scholar]
- Koulouriotis, D.E.; Ketipi, M.K. Robot evaluation and selection Part A: An integrated review and annotated taxonomy. Int. J. Adv. Manuf. Technol. 2014, 71, 1371–1394. [Google Scholar] [CrossRef]
- Matheson, E.; Minto, R.; Zampieri, E.G.; Faccio, M.; Rosati, G. Human–robot collaboration in manufacturing applications: A review. Robotics 2019, 8, 100. [Google Scholar] [CrossRef]
- Büyüközkan, G.; Çifçi, G. A novel hybrid MCDM approach based on fuzzy DEMATEL, fuzzy ANP, and fuzzy TOPSIS to evaluate green suppliers. Expert Syst. Appl. 2012, 39, 3000–3011. [Google Scholar] [CrossRef]
- Sakthivel, G.; Ilangkumaran, M.; Gaikwad, A. A hybrid multi-criteria decision modeling approach for the best biodiesel blend selection based on ANP-TOPSIS analysis. Ain Shams Eng. J. 2015, 6, 239–256. [Google Scholar] [CrossRef]
- Liu, H.C.; Ren, M.L.; Wu, J.; Lin, Q.L. An interval 2-tuple linguistic MCDM method for robot evaluation and selection. Int. J. Prod. Res. 2014, 52, 2867–2880. [Google Scholar] [CrossRef]
- Parameshwaran, R.; Kumar, S.P.; Saravanakumar, K. An integrated fuzzy MCDM based approach for robot selection considering objective and subjective criteria. Appl. Soft Comput. 2015, 26, 31–41. [Google Scholar] [CrossRef]
- Sen, D.K.; Datta, S.; Mahapatra, S.S. Extension of PROMETHEE for robot selection decision making: Simultaneous exploration of objective data and subjective (fuzzy) data. Benchmarking 2016, 23, 983–1014. [Google Scholar] [CrossRef]
- Saaty, T. The analytic hierarchy process (AHP) for decision making. Kobe Jpn. 1980, 1, 69. [Google Scholar]
- Bhattacharya, A.; Sarkar, B.; Mukherjee, S.K. Integrating AHP with QFD for robot selection under requirement perspective. Int. J. Prod. Res. 2005, 43, 3671–3685. [Google Scholar] [CrossRef]
- Goh, C.H. Analytic hierarchy process for robot selection. J. Manuf. Syst. 1997, 16, 381–386. [Google Scholar] [CrossRef]
- Geng, W.L.; Hu, Y.S. Performance evaluation of robot design based on AHP. Int. J. Database Theory Appl. 2013, 6, 79–88. [Google Scholar]
- Wang, C.N.; Nguyen, N.A.T.; Dang, T.T. Offshore wind power station (OWPS) site selection using a two-stage MCDM-based spherical fuzzy set approach. Sci. Rep. 2022, 12, 4260. [Google Scholar] [CrossRef]
- Kapoor, V.; Tak, S.S. Fuzzy application to the analytic hierarchy process for robot selection. Fuzzy Optim. Decis. Mak. 2005, 4, 209–234. [Google Scholar] [CrossRef]
- Wu, H.Y.; Chen, J.K.; Chen, I.S.; Zhuo, H.H. Ranking universities based on performance evaluation by a hybrid MCDM model. Measurement 2012, 45, 856–880. [Google Scholar] [CrossRef]
- Chang, C.W.; Lee, J.H.; Chao, P.Y.; Wang, C.Y.; Chen, G.D. Exploring the possibility of using humanoid robots as instructional tools for teaching a second language in primary school. J. Educ. Technol. Soc. 2010, 13, 13–24. [Google Scholar]
- Tsiakas, K.; Karkaletsis, V.; Makedon, F. A taxonomy in robot-assisted training: Current trends, needs, and challenges. In Proceedings of the 11th PErvasive Technologies Related to Assistive Environments Conference, Corfu, Greece, 26–29 June 2018; pp. 208–213. [Google Scholar]
- Khaksar, S.M.S.; Khosla, R.; Chu, M.T.; Shahmehr, F.S. Service innovation using social robot to reduce social vulnerability among older people in residential care facilities. Technol. Forecast. Soc. Change 2016, 113, 438–453. [Google Scholar] [CrossRef]
- Merlet, J.P. Interval analysis and reliability in robotics. Int. J. Reliab. Saf. 2009, 3, 104–130. [Google Scholar] [CrossRef]
- Yoshino, K.; Zhang, S. Construction of assistive teaching robot in programming class. In Proceedings of the 2018 7th International Congress on Advanced Applied Informatics, Yonago, Japan, 8–13 July 2018; pp. 215–220. [Google Scholar]
- Yu, M.; Zhou, R.; Cai, Z.; Tan, C.W.; Wang, H. Unravelling the relationship between response time and user experience in mobile applications. Internet Res. 2020, 30, 1353–1382. [Google Scholar] [CrossRef]
- Park, S.J.; Han, J.H.; Kang, B.H.; Shin, K.C. Assistive teaching robot, ROBOSEM, in English class and practical issues for its diffusion. In Proceedings of the Advanced Robotics and Its Social Impacts, Menlo Park, CA, USA, 2–4 October 2011; pp. 8–11. [Google Scholar]
- Ryu, H.J.; Song, M.J.; Choi, J.G.; Kim, M.S. Visualization of assistive teaching robot’s image based on child’s mental model. Arch. Des. Res. 2007, 20, 177–188. [Google Scholar]
- Yang, D.; Oh, E.S.; Wang, Y. Hybrid physical education teaching and curriculum design based on a voice interactive artificial intelligence educational robot. Sustainability 2020, 12, 8000. [Google Scholar] [CrossRef]
- Huijnen, C.A.; Lexis, M.A.; Jansens, R.; de Witte, L.P. How to implement robots in interventions for children with autism? A co-creation study involving people with autism, parents, and professionals. J. Autism Dev. Disord. 2017, 47, 3079–3096. [Google Scholar] [CrossRef] [PubMed]
- Hsia, C.H.; Lai, C.F.; Su, Y.S. Impact of using ARCS model and problem-based learning on human interaction with robot and motivation. Libr. Hi Tech 2022, 40, 963–975. [Google Scholar] [CrossRef]
- Sonderegger, S. Enhancing learning processes by integrating social robots with learning management systems. In Proceedings of the 2022 31st IEEE International Conference on Robot and Human Interactive Communication, Napoli, Italy, 29 August–2 September 2022; pp. 365–370. [Google Scholar]
- Wu, W.C.V.; Wang, R.J.; Chen, N.S. Instructional design using an in-house built teaching assistant robot to enhance elementary school English-as-a-foreign-language learning. Interact. Learn. Environ. 2015, 23, 696–714. [Google Scholar] [CrossRef]
- Louie, W.Y.G.; Nejat, G. A social robot learning to facilitate an assistive group-based activity from non-expert caregivers. Int. J. Soc. Robot. 2020, 12, 1159–1176. [Google Scholar] [CrossRef]
- Hong, Z.W.; Huang, Y.M.; Hsu, M.; Shen, W.W. Authoring robot-assisted instructional materials for improving learning performance and motivation in EFL classrooms. J. Educ. Technol. Soc. 2016, 19, 337–349. [Google Scholar]
- Cross, E.S.; Hortensius, R.; Wykowska, A. From social brains to social robots: Applying neurocognitive insights to human-robot interaction. Philos. Trans. R. Soc. B 2019, 374, 20180024. [Google Scholar] [CrossRef]
- Lauridsen, K.; Christensen, P.; Kongsø, H.E. Assessment of the reliability of robotic systems for use in radiation environments. Reliab. Eng. Syst. Saf. 1996, 53, 265–276. [Google Scholar] [CrossRef]
- Jung, J.G.; Choi, J.H.; Han, J.H. Analysis on children’s response depending on teaching assistant robots’ styles. J. Korean Assoc. Inf. Educ. 2007, 11, 195–203. [Google Scholar]
- Hsu, C.H.; Wang, F.K.; Tzeng, G.H. The best vendor selection for conducting the recycled material based on a hybrid MCDM model combining DANP with VIKOR. Resour. Conserv. Recycl. 2012, 66, 95–111. [Google Scholar] [CrossRef]
- Govindan, K.; Kannan, D.; Shankar, M. Evaluation of green manufacturing practices using a hybrid MCDM model combining DANP with PROMETHEE. Int. J. Prod. Res. 2015, 53, 6344–6371. [Google Scholar] [CrossRef]
- Hung, Y.H.; Chou, S.C.T.; Tzeng, G.H. Knowledge management adoption and assessment for SMEs by a novel MCDM approach. Decis. Support Syst. 2011, 51, 270–291. [Google Scholar] [CrossRef]
- Tzeng, G.H.; Chiang, C.H.; Li, C.W. Evaluating intertwined effects in e-learning programs: A novel hybrid MCDM model based on factor analysis and DEMATEL. Expert Syst. Appl. 2007, 32, 1028–1044. [Google Scholar] [CrossRef]
- Ordoobadi, S.M. Application of ANP methodology in evaluation of advanced technologies. J. Manuf. Technol. Manag. 2012, 23, 229–252. [Google Scholar] [CrossRef]
- Shao, Q.G.; Liou, J.J.; Weng, S.S.; Chuang, Y.C. Improving the green building evaluation system in China based on the DANP method. Sustainability 2018, 10, 1173. [Google Scholar] [CrossRef]
- James, G.M.; Sugar, C.A. Clustering for sparsely sampled functional data. J. Am. Stat. Assoc. 2003, 98, 397–408. [Google Scholar] [CrossRef]
- DiPasquale, D.; Wheaton, W.C. The markets for real estate assets and space: A conceptual framework. Real Estate Econ. 1992, 20, 181–198. [Google Scholar] [CrossRef]
- Yang, C.L.; Chuang, S.P.; Huang, R.H. Manufacturing evaluation system based on AHP/ANP approach for wafer fabricating industry. Expert Syst. Appl. 2009, 36, 11369–11377. [Google Scholar] [CrossRef]
- Chung, S.H.; Lee, A.H.; Pearn, W.L. Product mix optimization for semiconductor manufacturing based on AHP and ANP analysis. J. Adv. Manuf. Technol. 2005, 25, 1144–1156. [Google Scholar] [CrossRef]
| Dimensions | Indicators | Literature Sources |
|---|---|---|
| System Structure (X1) | System Reliability (X11) | [67,68,78] |
| System Security (X12) | [69,78] | |
| System Flexibility (X13) | [66,68,69] | |
| Functional Diversity (X14) | [6,65,69] | |
| Operational Convenience (X15) | [66,67,68] | |
| Appearance interface (X2) | Esthetics of the Exterior Structure (X21) | [12,68,79] |
| Clarity of Interface Presentation (X22) | [69,70] | |
| Simplicity of Interface Interaction (X23) | [12,63,70] | |
| Degree of Equipment Expansion (X24) | [19,63] | |
| Teaching function (X3) | Teaching Content Standardization (X31) | [66,71,72] |
| Teaching Content Applicability (X32) | [71,73,74] | |
| Teaching Content Integrity (X33) | [66,74] | |
| Control of the Teaching Process (X34) | [71,72,75] | |
| Auxiliary Support (X4) | Regulatory Capability (X41) | [68,75] |
| Voice Interaction Capability (X42) | [66,68,77] | |
| Resource Management Capability (X43) | [76,77] | |
| Learning Support Capability (X44) | [63,77,78] |
| Z | X11 | X12 | X13 | X14 | X15 | X21 | X22 | X23 | X24 | X31 | X32 | X33 | X34 | X41 | X42 | X43 | X44 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| X11 | 0.20 | 0.28 | 0.31 | 0.31 | 0.35 | 0.17 | 0.18 | 0.24 | 0.31 | 0.30 | 0.30 | 0.30 | 0.35 | 0.34 | 0.28 | 0.31 | 0.34 |
| X12 | 0.24 | 0.16 | 0.22 | 0.26 | 0.28 | 0.13 | 0.14 | 0.20 | 0.26 | 0.25 | 0.26 | 0.26 | 0.30 | 0.30 | 0.23 | 0.26 | 0.27 |
| X13 | 0.22 | 0.21 | 0.18 | 0.30 | 0.32 | 0.15 | 0.15 | 0.23 | 0.27 | 0.26 | 0.26 | 0.25 | 0.30 | 0.29 | 0.23 | 0.26 | 0.29 |
| X14 | 0.26 | 0.24 | 0.29 | 0.26 | 0.35 | 0.17 | 0.19 | 0.27 | 0.31 | 0.29 | 0.31 | 0.30 | 0.35 | 0.33 | 0.27 | 0.31 | 0.34 |
| X15 | 0.22 | 0.21 | 0.25 | 0.28 | 0.24 | 0.15 | 0.16 | 0.24 | 0.25 | 0.24 | 0.26 | 0.25 | 0.31 | 0.28 | 0.23 | 0.27 | 0.29 |
| X21 | 0.12 | 0.11 | 0.14 | 0.17 | 0.22 | 0.08 | 0.16 | 0.19 | 0.16 | 0.17 | 0.17 | 0.17 | 0.19 | 0.17 | 0.13 | 0.16 | 0.17 |
| X22 | 0.16 | 0.15 | 0.17 | 0.22 | 0.26 | 0.19 | 0.11 | 0.23 | 0.20 | 0.21 | 0.23 | 0.22 | 0.24 | 0.22 | 0.18 | 0.21 | 0.23 |
| X23 | 0.21 | 0.19 | 0.25 | 0.28 | 0.32 | 0.19 | 0.19 | 0.18 | 0.23 | 0.25 | 0.27 | 0.25 | 0.31 | 0.26 | 0.22 | 0.25 | 0.28 |
| X24 | 0.27 | 0.27 | 0.29 | 0.35 | 0.36 | 0.17 | 0.17 | 0.26 | 0.24 | 0.27 | 0.30 | 0.29 | 0.33 | 0.32 | 0.28 | 0.30 | 0.34 |
| X31 | 0.15 | 0.16 | 0.16 | 0.21 | 0.23 | 0.12 | 0.13 | 0.18 | 0.18 | 0.17 | 0.25 | 0.24 | 0.26 | 0.23 | 0.18 | 0.24 | 0.25 |
| X32 | 0.14 | 0.14 | 0.16 | 0.20 | 0.23 | 0.10 | 0.11 | 0.18 | 0.18 | 0.23 | 0.18 | 0.24 | 0.26 | 0.24 | 0.18 | 0.24 | 0.27 |
| X33 | 0.16 | 0.15 | 0.18 | 0.22 | 0.25 | 0.11 | 0.13 | 0.19 | 0.21 | 0.25 | 0.26 | 0.19 | 0.27 | 0.25 | 0.19 | 0.26 | 0.28 |
| X34 | 0.16 | 0.16 | 0.19 | 0.22 | 0.26 | 0.11 | 0.13 | 0.19 | 0.20 | 0.25 | 0.26 | 0.26 | 0.22 | 0.28 | 0.21 | 0.26 | 0.29 |
| X41 | 0.19 | 0.21 | 0.20 | 0.26 | 0.27 | 0.12 | 0.13 | 0.20 | 0.22 | 0.26 | 0.27 | 0.26 | 0.30 | 0.22 | 0.23 | 0.26 | 0.29 |
| X42 | 0.20 | 0.19 | 0.22 | 0.28 | 0.31 | 0.12 | 0.14 | 0.22 | 0.25 | 0.24 | 0.26 | 0.25 | 0.29 | 0.28 | 0.18 | 0.25 | 0.28 |
| X43 | 0.22 | 0.22 | 0.24 | 0.29 | 0.30 | 0.13 | 0.15 | 0.22 | 0.25 | 0.26 | 0.27 | 0.27 | 0.28 | 0.28 | 0.22 | 0.22 | 0.30 |
| X44 | 0.20 | 0.20 | 0.22 | 0.27 | 0.28 | 0.13 | 0.14 | 0.20 | 0.24 | 0.24 | 0.26 | 0.25 | 0.27 | 0.27 | 0.22 | 0.26 | 0.22 |
| X1 | X2 | X3 | X4 | |
|---|---|---|---|---|
| X1 | 0.26 | 0.21 | 0.28 | 0.29 |
| X2 | 0.23 | 0.18 | 0.24 | 0.23 |
| X3 | 0.19 | 0.15 | 0.24 | 0.24 |
| X4 | 0.24 | 0.18 | 0.26 | 0.25 |
| INRM | X11 | X12 | X13 | X14 | X15 | X21 | X22 | X23 | X24 | X31 | X32 | X33 | X34 | X41 | X42 | X43 | X44 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| r | 4.83 | 4.04 | 4.15 | 4.81 | 4.14 | 2.68 | 3.42 | 4.14 | 4.81 | 3.31 | 3.27 | 3.54 | 3.67 | 3.88 | 3.96 | 4.14 | 3.86 |
| c | 3.35 | 3.27 | 3.61 | 4.36 | 4.82 | 2.33 | 2.49 | 3.62 | 3.97 | 4.12 | 4.37 | 4.24 | 4.82 | 4.54 | 3.67 | 4.31 | 4.74 |
| r + c | 8.17 | 7.31 | 7.77 | 9.17 | 8.96 | 5.01 | 5.91 | 7.76 | 8.77 | 7.44 | 7.63 | 7.78 | 8.49 | 8.42 | 7.63 | 8.46 | 8.59 |
| r − c | 1.48 | 0.77 | 0.54 | 0.45 | −0.68 | 0.34 | 0.92 | 0.52 | 0.84 | −0.81 | −1.10 | −0.70 | −1.16 | −0.66 | 0.29 | −0.17 | −0.88 |
| Dimensions | Influence Degree/Rank | Influenced Degree/Rank | Centrality /Rank | Cause Degree /Rank |
|---|---|---|---|---|
| System Structure (X1) | 1.034(1) | 0.907(3) | 1.941(1) | 0.128(2) |
| Appearance interface (X2) | 0.884(2) | 0.724(4) | 1.607(4) | 0.160(1) |
| Teaching function (X3) | 0.815(3) | 1.026(1) | 1.841(3) | −0.211(3) |
| Auxiliary Support (X4) | 0.930(4) | 1.007(2) | 1.938(2) | −0.077(4) |
| System Reliability(X11) | 4.826(1) | 3.345(14) | 8.171(8) | 1.481(1) |
| System Security(X12) | 4.042(8) | 3.27(15) | 7.312(15) | 0.772(4) |
| System Flexibility(X13) | 4.152(4) | 3.615(13) | 7.767(10) | 0.537(5) |
| Functional Diversity(X14) | 4.811(2) | 4.361(6) | 9.172(1) | 0.449(7) |
| Operational Convenience(X15) | 4.138(7) | 4.821(2) | 8.959(2) | −0.683(12) |
| Esthetics of the Exterior Structure(X21) | 2.675(17) | 2.331(17) | 5.006(17) | 0.345(8) |
| Clarity of Interface Presentation(X22) | 3.418(14) | 2.493(16) | 5.91(16) | 0.925(2) |
| Simplicity of Interface Interaction(X23) | 4.142(6) | 3.621(12) | 7.764(11) | 0.521(6) |
| Degree of Equipment Expansion(X24) | 4.807(3) | 3.966(10) | 8.773(3) | 0.841(3) |
| Teaching Content Standardization(X31) | 3.314(15) | 4.123(9) | 7.437(14) | −0.809(14) |
| Teaching Content Applicability(X32) | 3.266(16) | 4.367(5) | 7.632(12) | −1.101(16) |
| Teaching Content Integrity(X33) | 3.541(13) | 4.243(8) | 7.785(9) | −0.702(13) |
| Control of the Teaching Process(X34) | 3.667(12) | 4.825(1) | 8.492(5) | −1.158(17) |
| Regulatory Capability(X41) | 3.88(10) | 4.544(4) | 8.424(7) | −0.665(11) |
| Voice Interaction Capability(X42) | 3.96(9) | 3.666(11) | 7.625(13) | 0.294(9) |
| Resource Management Capability(X43) | 4.143(5) | 4.313(7) | 8.456(6) | −0.17(10) |
| Learning Support Capability(X44) | 3.857(11) | 4.735(3) | 8.592(4) | −0.879(15) |
| Quadrants | Title | Factors (Sorted by Centrality) | Features |
|---|---|---|---|
| 1 | Driving Factor | X11 X12 X13 X14X23 X24 X42 | The reason degree is positive; the centroid is above 7 |
| 2 | Voluntariness | X21 X22 | The reason degree is positive; the centroid is below 7 |
| 3 | Independent | / | The reason degree is negative; the centroid is below 7 |
| 4 | Core Problem | X15 X31 X32 X33X34 X41 X43 X44 | The reason degree is negative; the centroid is above 7 |
| Z | X11 | X12 | X13 | X14 | X15 | X21 | X22 | X23 | X24 | X31 | X32 | X33 | X34 | X41 | X42 | X43 | X44 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| X11 | 0.14 | 0.20 | 0.19 | 0.22 | 0.25 | 0.19 | 0.20 | 0.27 | 0.34 | 0.24 | 0.24 | 0.24 | 0.28 | 0.27 | 0.22 | 0.24 | 0.27 |
| X12 | 0.21 | 0.14 | 0.19 | 0.22 | 0.24 | 0.18 | 0.19 | 0.27 | 0.36 | 0.23 | 0.25 | 0.24 | 0.28 | 0.28 | 0.22 | 0.25 | 0.26 |
| X13 | 0.18 | 0.17 | 0.15 | 0.24 | 0.26 | 0.19 | 0.19 | 0.29 | 0.33 | 0.24 | 0.24 | 0.23 | 0.28 | 0.27 | 0.22 | 0.24 | 0.27 |
| X14 | 0.19 | 0.17 | 0.20 | 0.18 | 0.25 | 0.18 | 0.20 | 0.29 | 0.33 | 0.23 | 0.25 | 0.24 | 0.28 | 0.26 | 0.21 | 0.25 | 0.27 |
| X15 | 0.19 | 0.17 | 0.21 | 0.23 | 0.20 | 0.19 | 0.20 | 0.30 | 0.31 | 0.23 | 0.25 | 0.24 | 0.29 | 0.26 | 0.22 | 0.25 | 0.27 |
| X21 | 0.16 | 0.15 | 0.18 | 0.22 | 0.28 | 0.14 | 0.27 | 0.32 | 0.27 | 0.24 | 0.25 | 0.24 | 0.27 | 0.27 | 0.21 | 0.25 | 0.27 |
| X22 | 0.17 | 0.16 | 0.17 | 0.23 | 0.27 | 0.26 | 0.15 | 0.32 | 0.28 | 0.24 | 0.25 | 0.24 | 0.27 | 0.26 | 0.21 | 0.25 | 0.28 |
| X23 | 0.17 | 0.15 | 0.20 | 0.23 | 0.26 | 0.24 | 0.24 | 0.23 | 0.29 | 0.23 | 0.25 | 0.23 | 0.29 | 0.26 | 0.21 | 0.25 | 0.28 |
| X24 | 0.17 | 0.17 | 0.19 | 0.23 | 0.23 | 0.20 | 0.21 | 0.31 | 0.28 | 0.22 | 0.25 | 0.25 | 0.28 | 0.26 | 0.23 | 0.24 | 0.27 |
| X31 | 0.17 | 0.18 | 0.17 | 0.23 | 0.25 | 0.19 | 0.21 | 0.30 | 0.30 | 0.18 | 0.27 | 0.27 | 0.28 | 0.25 | 0.20 | 0.26 | 0.28 |
| X32 | 0.17 | 0.16 | 0.18 | 0.23 | 0.26 | 0.18 | 0.19 | 0.31 | 0.32 | 0.25 | 0.20 | 0.27 | 0.29 | 0.26 | 0.20 | 0.26 | 0.29 |
| X33 | 0.17 | 0.16 | 0.18 | 0.23 | 0.26 | 0.18 | 0.20 | 0.30 | 0.32 | 0.25 | 0.27 | 0.19 | 0.28 | 0.25 | 0.20 | 0.26 | 0.28 |
| X34 | 0.16 | 0.16 | 0.19 | 0.22 | 0.26 | 0.17 | 0.20 | 0.30 | 0.32 | 0.25 | 0.27 | 0.26 | 0.22 | 0.27 | 0.20 | 0.25 | 0.28 |
| X41 | 0.17 | 0.19 | 0.18 | 0.23 | 0.24 | 0.17 | 0.19 | 0.30 | 0.34 | 0.24 | 0.25 | 0.24 | 0.27 | 0.22 | 0.23 | 0.26 | 0.29 |
| X42 | 0.17 | 0.16 | 0.19 | 0.23 | 0.26 | 0.17 | 0.19 | 0.30 | 0.34 | 0.24 | 0.25 | 0.24 | 0.28 | 0.28 | 0.18 | 0.25 | 0.29 |
| X43 | 0.17 | 0.17 | 0.19 | 0.23 | 0.23 | 0.17 | 0.20 | 0.29 | 0.34 | 0.24 | 0.25 | 0.25 | 0.26 | 0.28 | 0.22 | 0.21 | 0.30 |
| X44 | 0.17 | 0.17 | 0.19 | 0.23 | 0.24 | 0.18 | 0.20 | 0.28 | 0.34 | 0.24 | 0.25 | 0.25 | 0.27 | 0.28 | 0.23 | 0.27 | 0.23 |
| Z | X11 | X12 | X13 | X14 | X15 | X21 | X22 | X23 | X24 | X31 | X32 | X33 | X34 | X41 | X42 | X43 | X44 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| X11 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 |
| X12 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 |
| X13 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 |
| X14 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 |
| X15 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 |
| X21 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 |
| X22 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 | 0.04 |
| X23 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 |
| X24 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 |
| X31 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 |
| X32 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 |
| X33 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 |
| X34 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 |
| X41 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 |
| X42 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 | 0.06 |
| X43 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 | 0.07 |
| X44 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 | 0.08 |
| Factor | X34 | X44 | X41 | X32 | X43 | X33 | X31 | X24 | X15 | X42 | X23 | X14 | X13 | X11 | X12 | X22 | X21 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Weight | 0.077 | 0.076 | 0.072 | 0.070 | 0.069 | 0.068 | 0.066 | 0.063 | 0.061 | 0.058 | 0.058 | 0.056 | 0.046 | 0.042 | 0.041 | 0.039 | 0.036 |
| Rank | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| T | Local Weight | Ranking | T | Local Weight | Ranking | Global Weight |
|---|---|---|---|---|---|---|
| X1 | 0.246 | 3 | X11 | 0.172 | 14 | 0.042 |
| X12 | 0.168 | 15 | 0.041 | |||
| X13 | 0.186 | 13 | 0.046 | |||
| X14 | 0.226 | 12 | 0.056 | |||
| X15 | 0.248 | 9 | 0.061 | |||
| X2 | 0.196 | 4 | X21 | 0.186 | 17 | 0.036 |
| X22 | 0.201 | 16 | 0.039 | |||
| X23 | 0.294 | 11 | 0.058 | |||
| X24 | 0.320 | 8 | 0.063 | |||
| X3 | 0.281 | 1 | X31 | 0.235 | 7 | 0.066 |
| X32 | 0.249 | 4 | 0.070 | |||
| X33 | 0.243 | 6 | 0.068 | |||
| X34 | 0.273 | 1 | 0.077 | |||
| X4 | 0.276 | 2 | X41 | 0.262 | 3 | 0.072 |
| X42 | 0.211 | 10 | 0.058 | |||
| X43 | 0.251 | 5 | 0.069 | |||
| X11 | 0.172 | 14 | 0.042 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, P.-Y.; Zhao, Z.-Y.; Shao, Q.-G.; Lin, P.-Y.; Li, Z. The Construction of an Evaluation Index System for Assistive Teaching Robots Aimed at Sustainable Learning. Sustainability 2023, 15, 13196. https://doi.org/10.3390/su151713196
Su P-Y, Zhao Z-Y, Shao Q-G, Lin P-Y, Li Z. The Construction of an Evaluation Index System for Assistive Teaching Robots Aimed at Sustainable Learning. Sustainability. 2023; 15(17):13196. https://doi.org/10.3390/su151713196
Chicago/Turabian StyleSu, Pei-Yao, Zi-Ying Zhao, Qi-Gan Shao, Pei-Yuan Lin, and Zhe Li. 2023. "The Construction of an Evaluation Index System for Assistive Teaching Robots Aimed at Sustainable Learning" Sustainability 15, no. 17: 13196. https://doi.org/10.3390/su151713196
APA StyleSu, P.-Y., Zhao, Z.-Y., Shao, Q.-G., Lin, P.-Y., & Li, Z. (2023). The Construction of an Evaluation Index System for Assistive Teaching Robots Aimed at Sustainable Learning. Sustainability, 15(17), 13196. https://doi.org/10.3390/su151713196