
Numerical Investigations of Tribological Characteristics of Biomimetic-Textured Surfaces


Abstract
:1. Introduction
2. Bionic Surface Simulation
2.1. Surface Simulation with an Arbitrary Distribution of Roughness Peaks
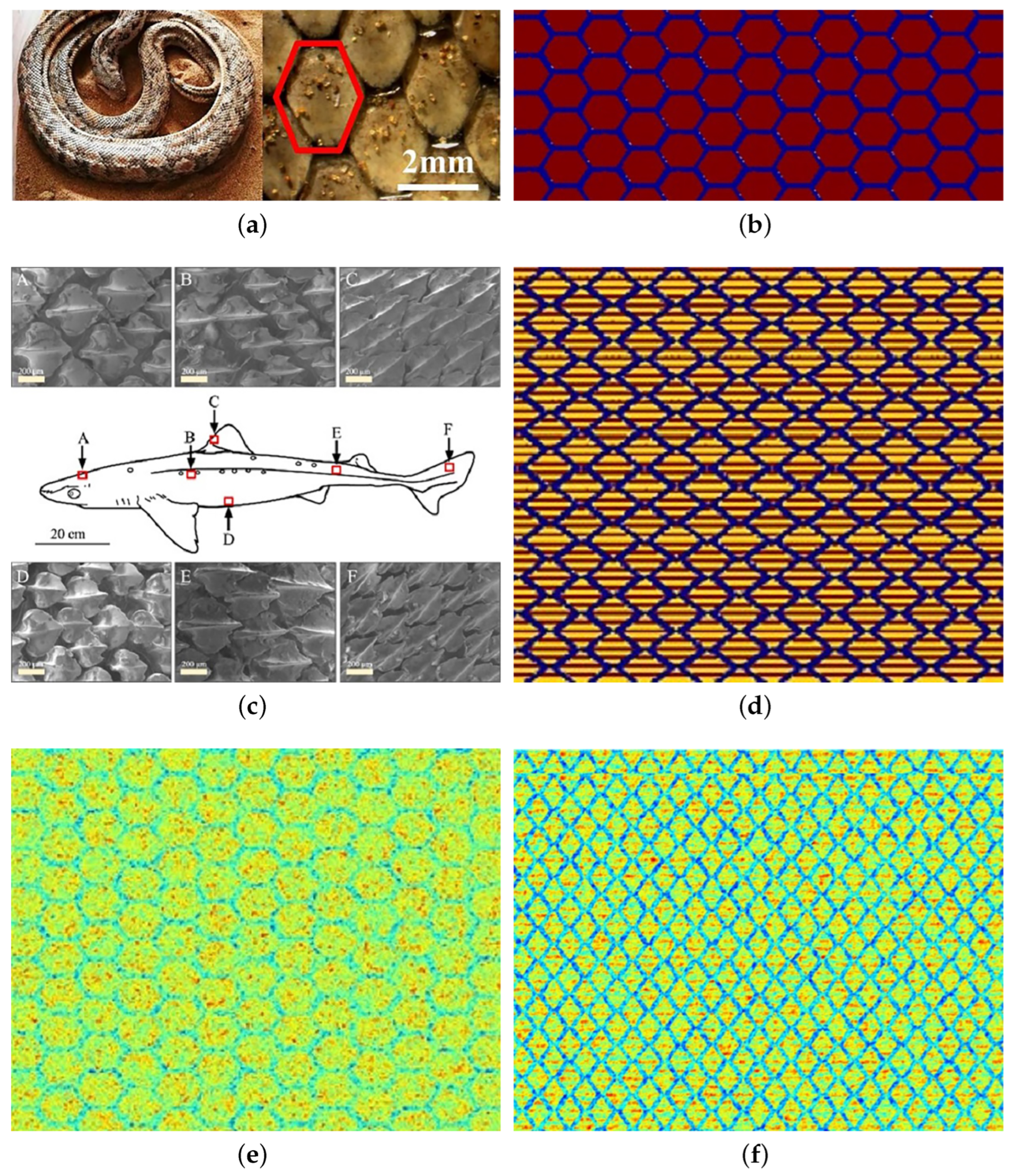
2.2. Bionic-Textured Surface Simulation
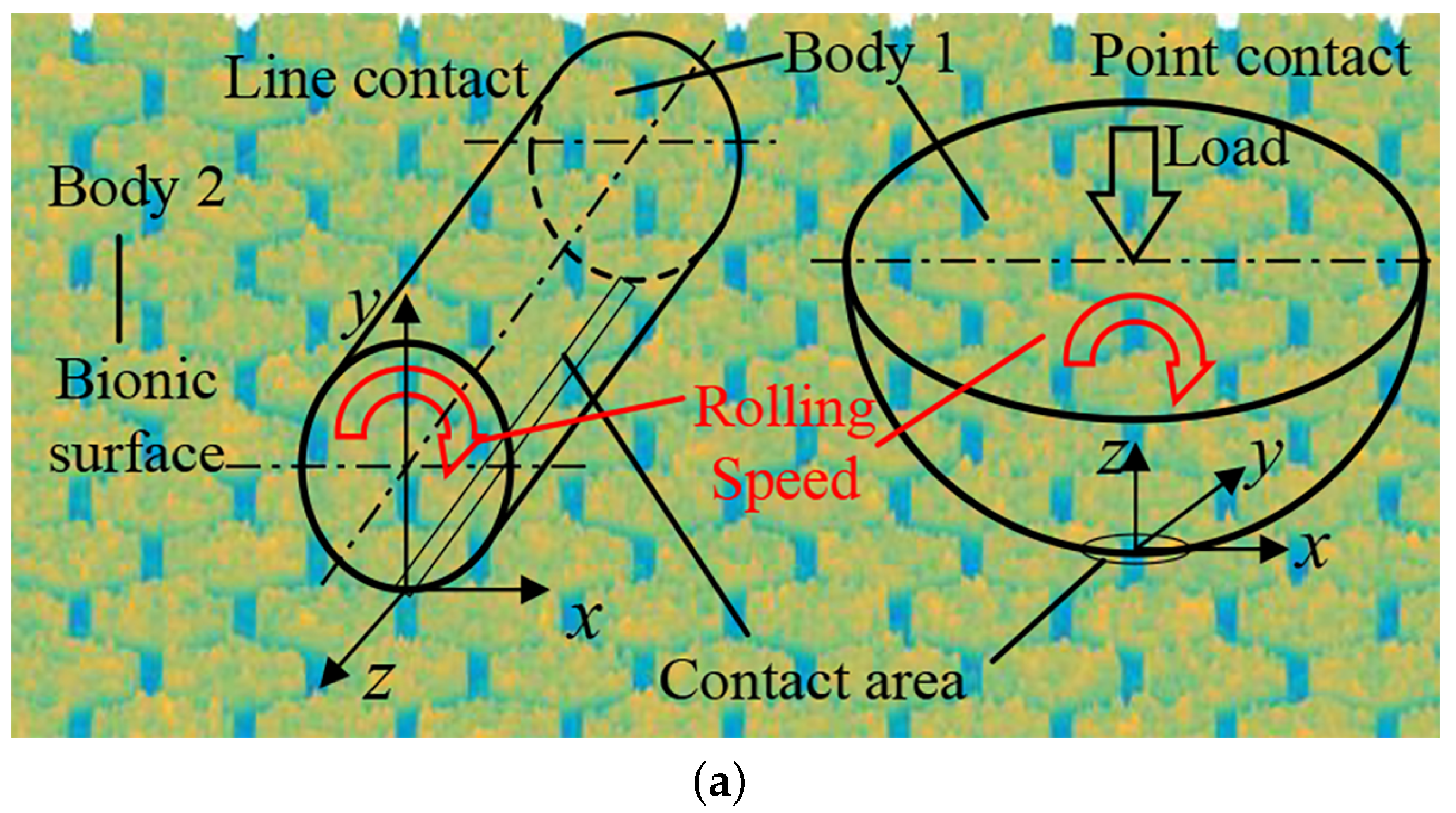
3. Numerical Calculation Model
3.1. Transient Reynolds Equation
3.2. Load-Balance Equation
3.3. Transient Film Thickness Equation
3.4. Transient Wear Model
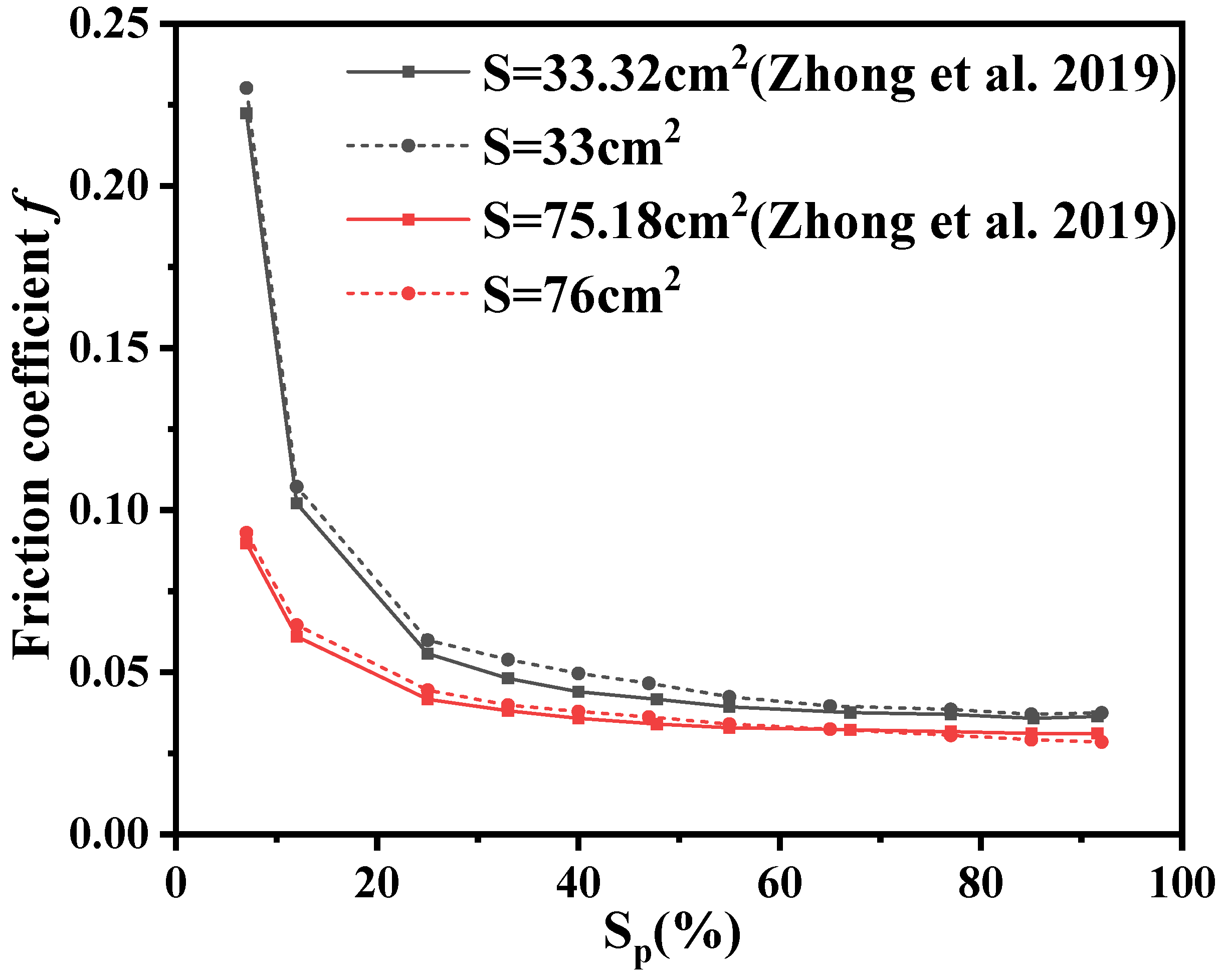
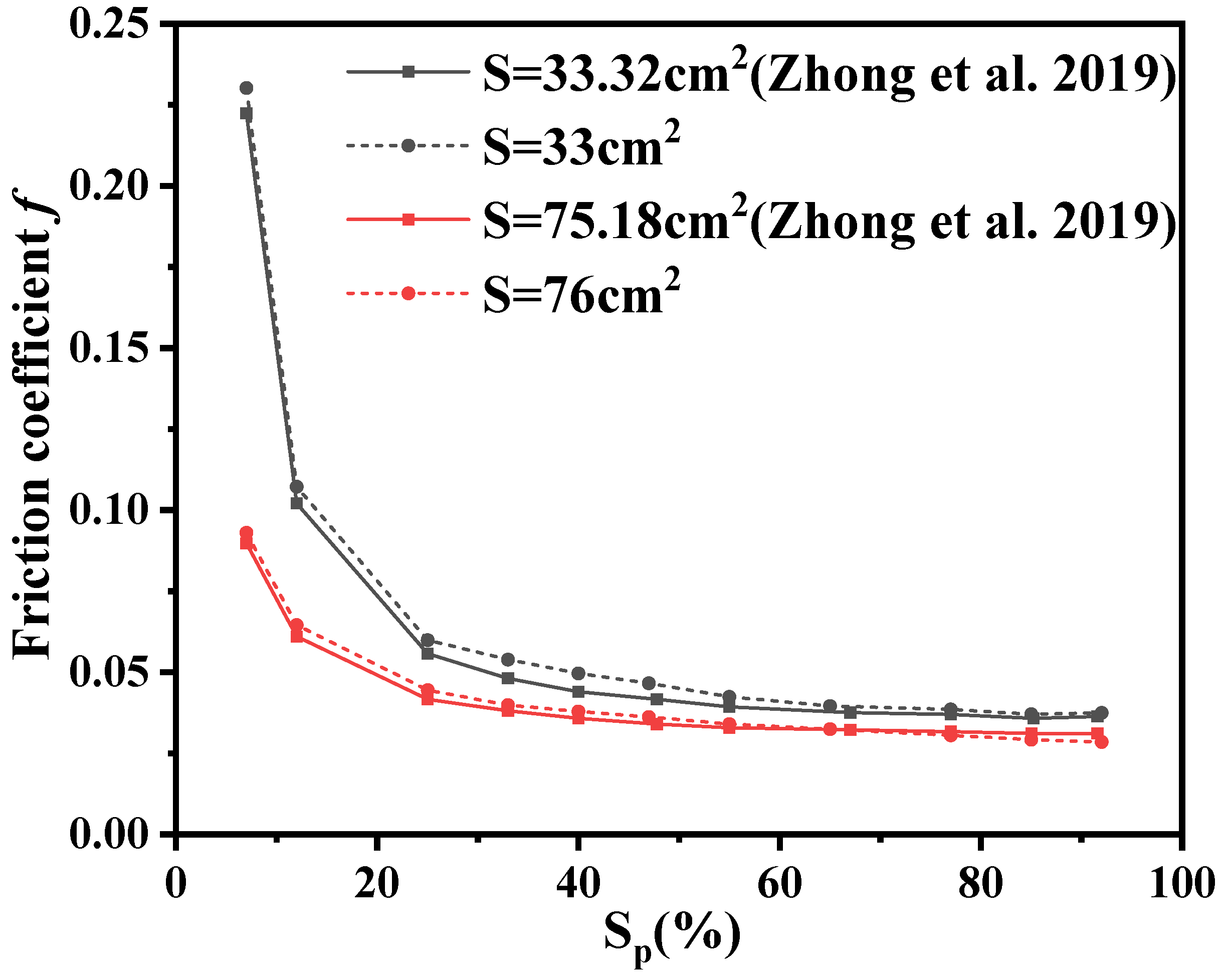
3.5. Simulation Procedure and Verification
4. Results and Discussion
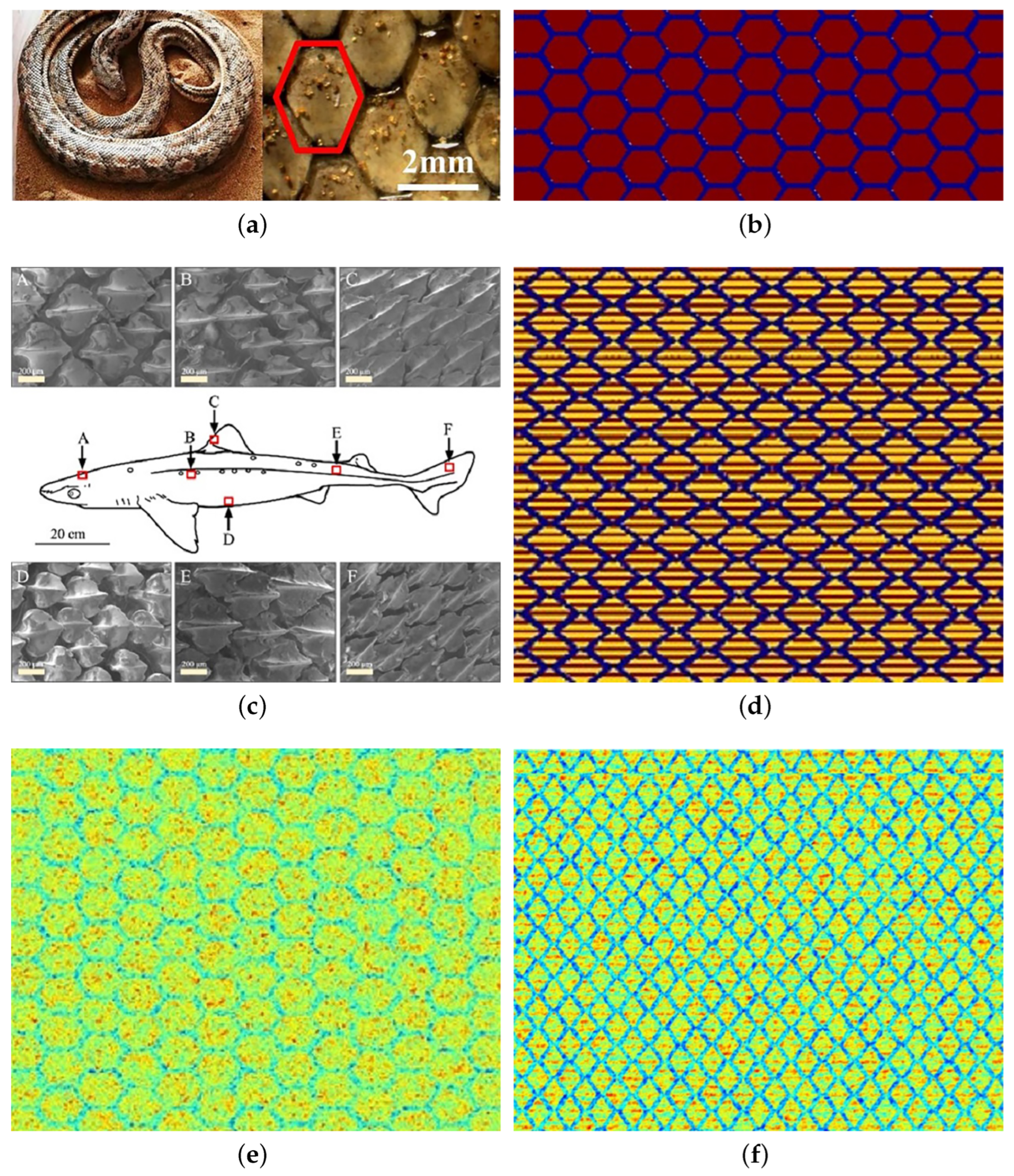
4.1. Biomimetic Surface Analysis of Snakeskin
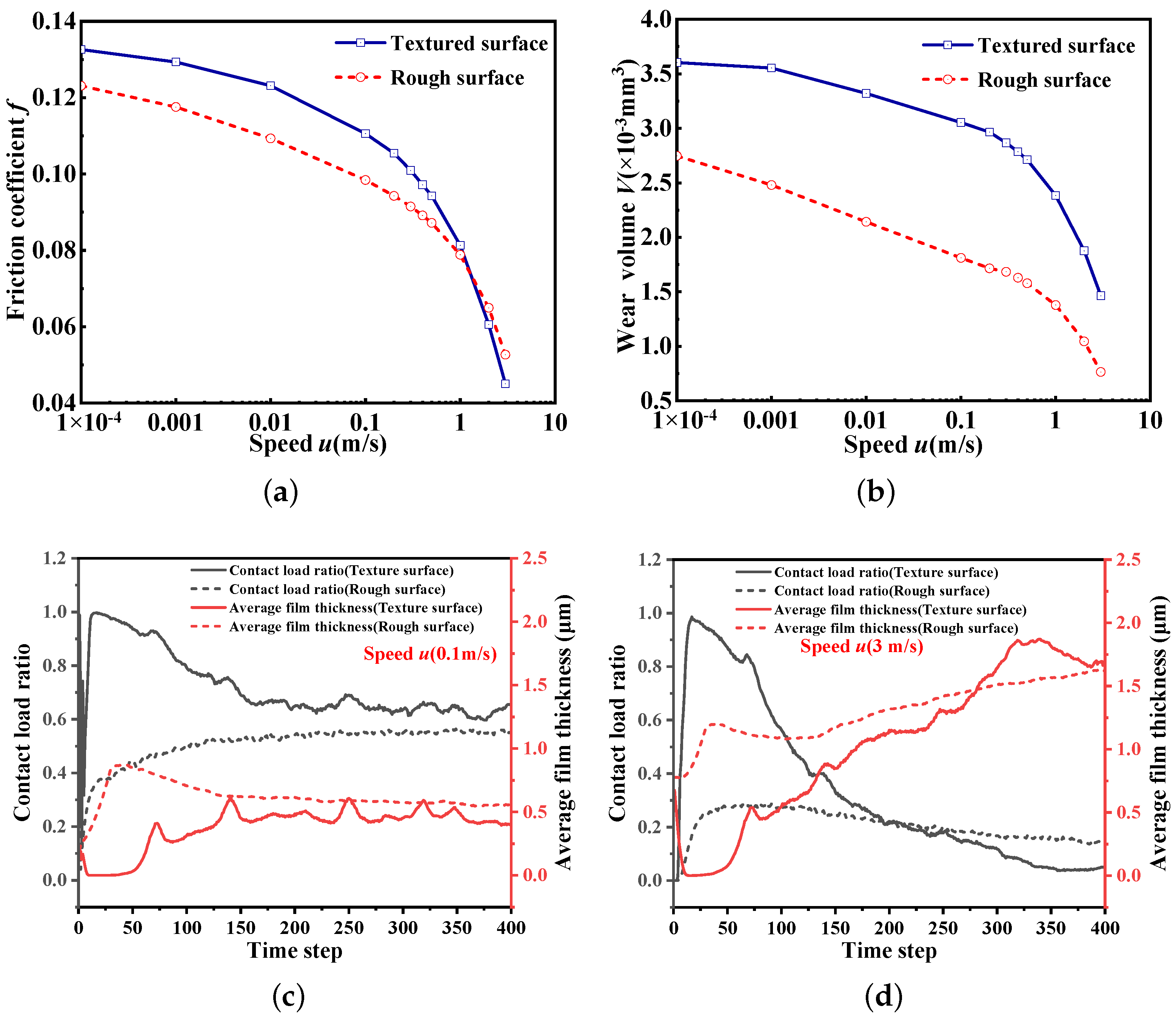
4.2. Biomimetic Surface Analysis of Sharkskin
5. Conclusions
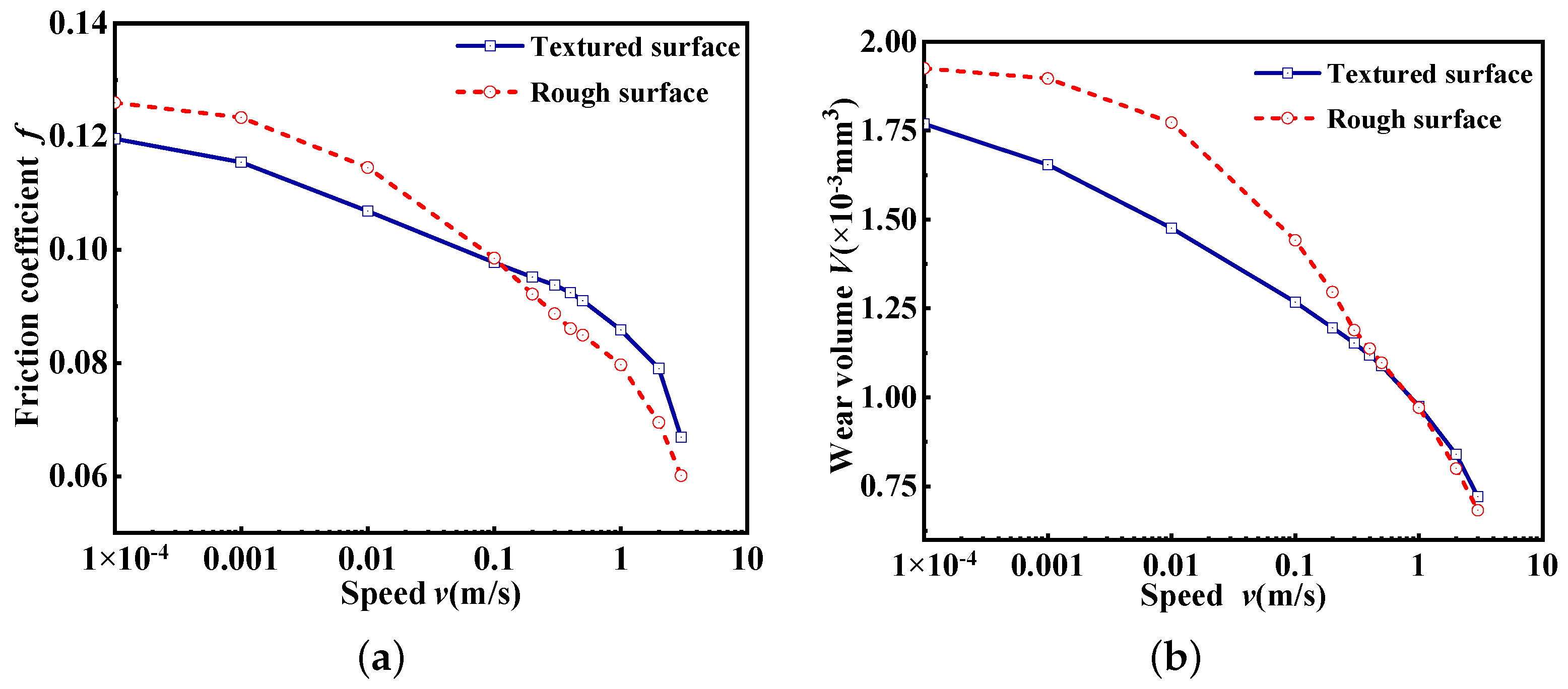
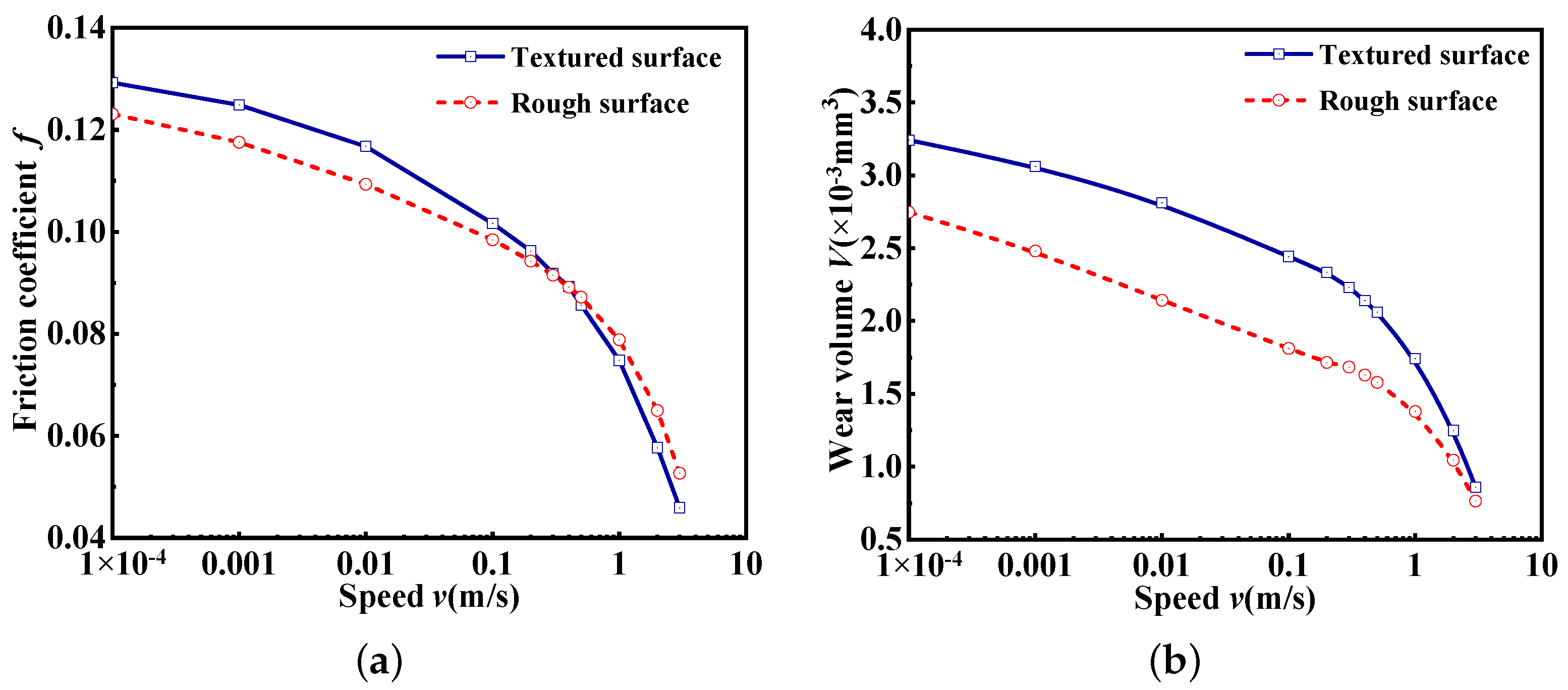
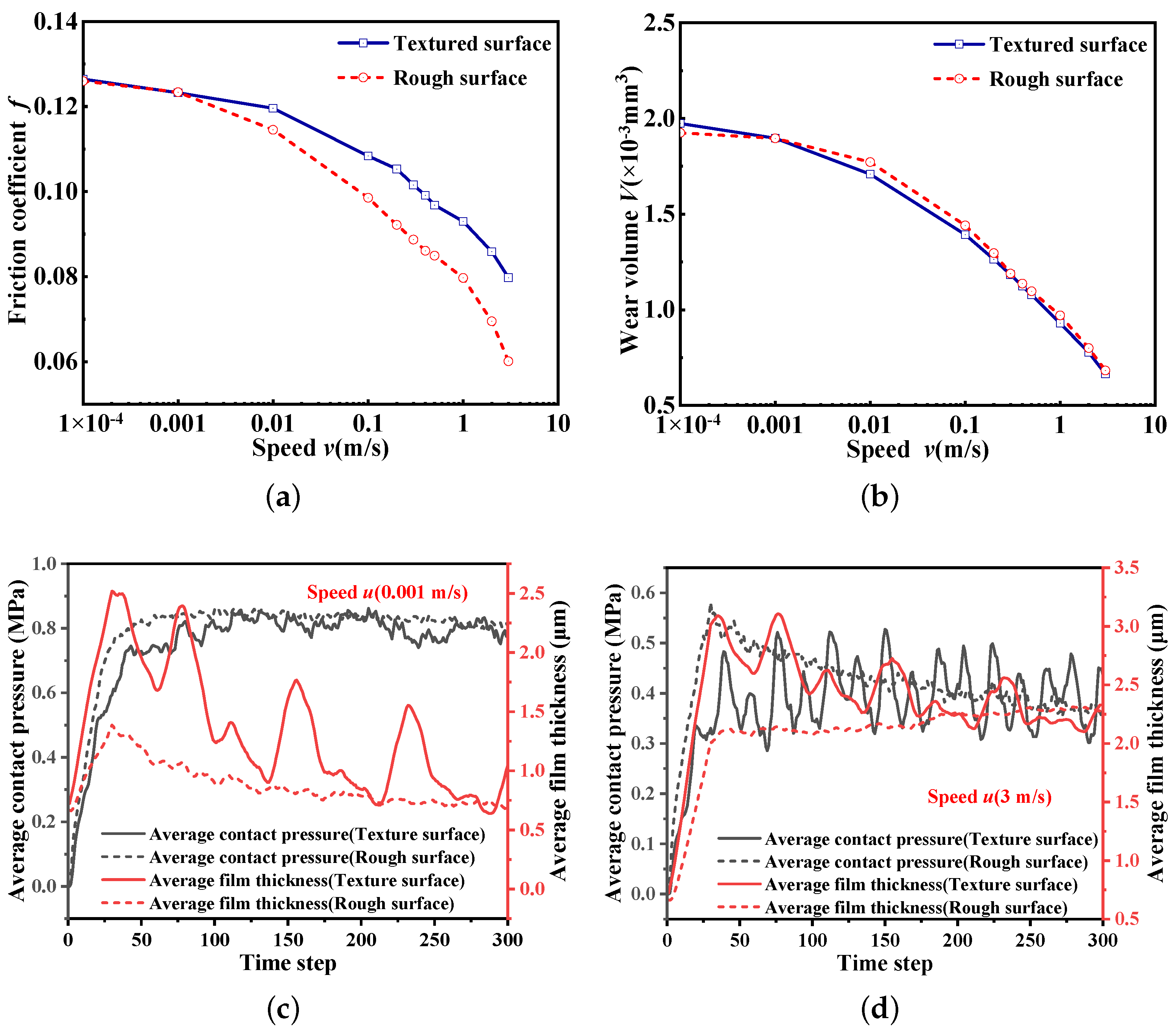
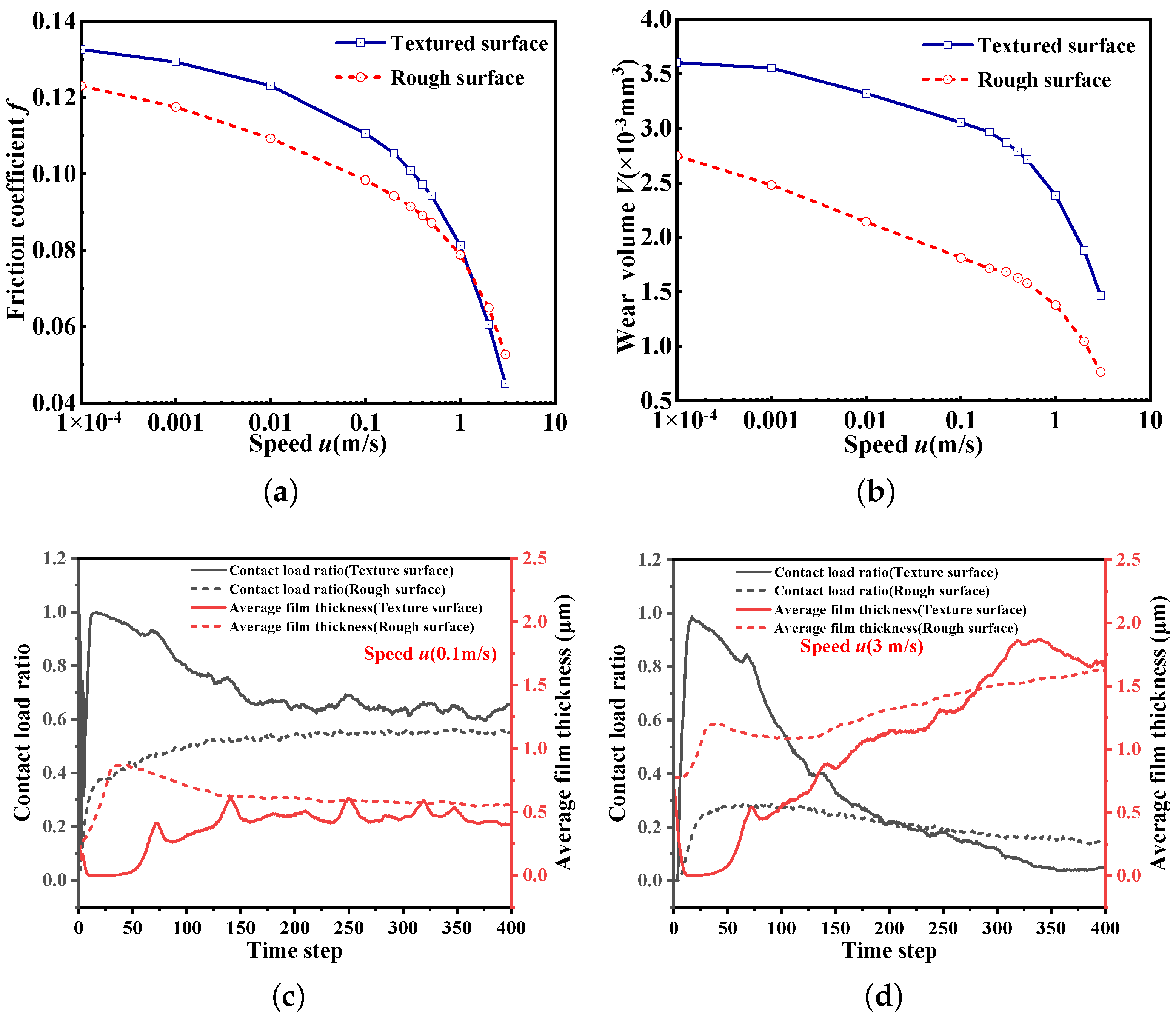
- Under the line-contact condition, both biomimetic-textured surfaces can reduce the coefficient of friction and wear volume at high speeds. However, under point-contact conditions, the snakeskin texture shows a better texture effect at low speeds. The sharkskin texture can cause the surface properties to deteriorate under the point-contact condition and is not recommended.
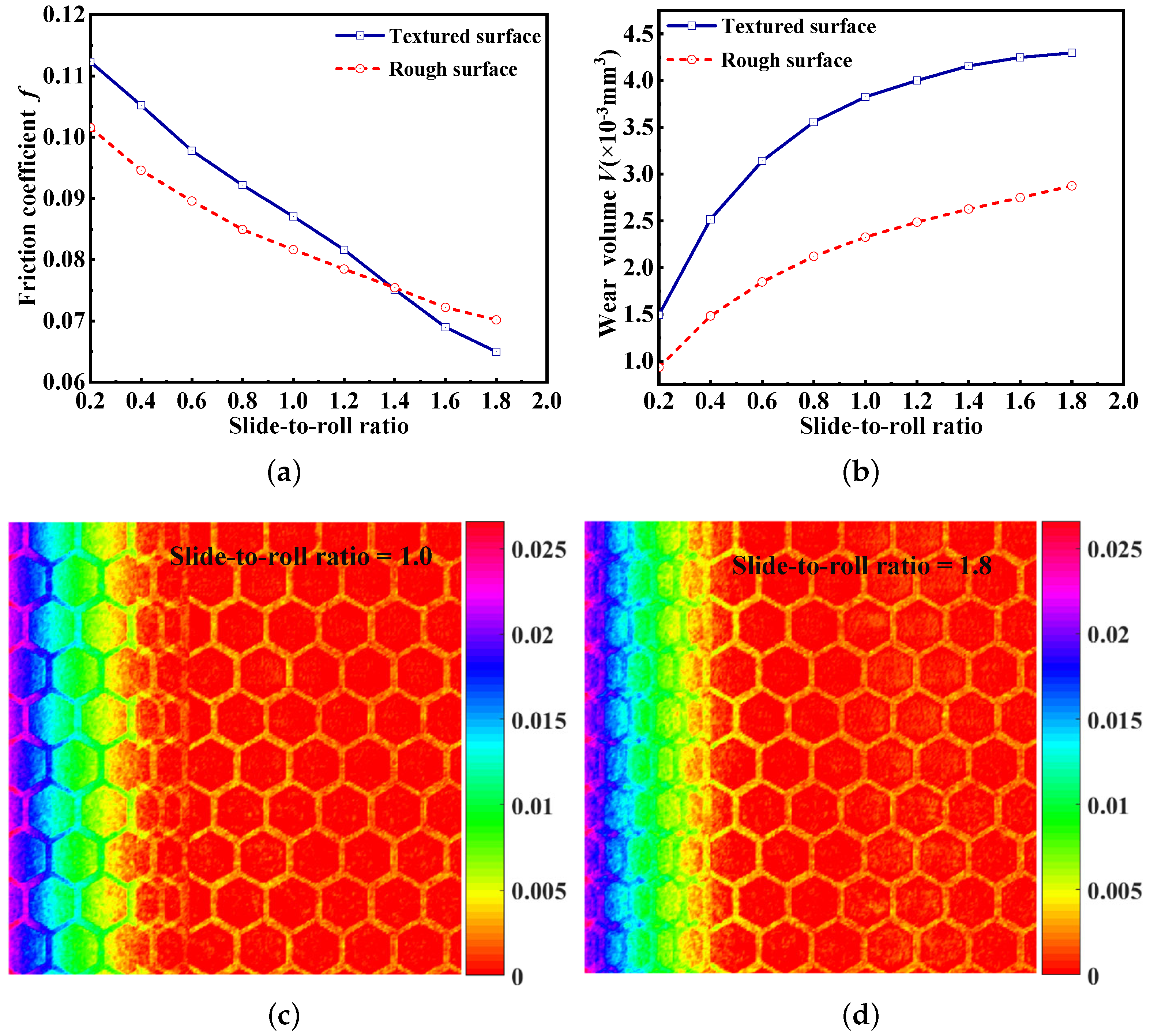
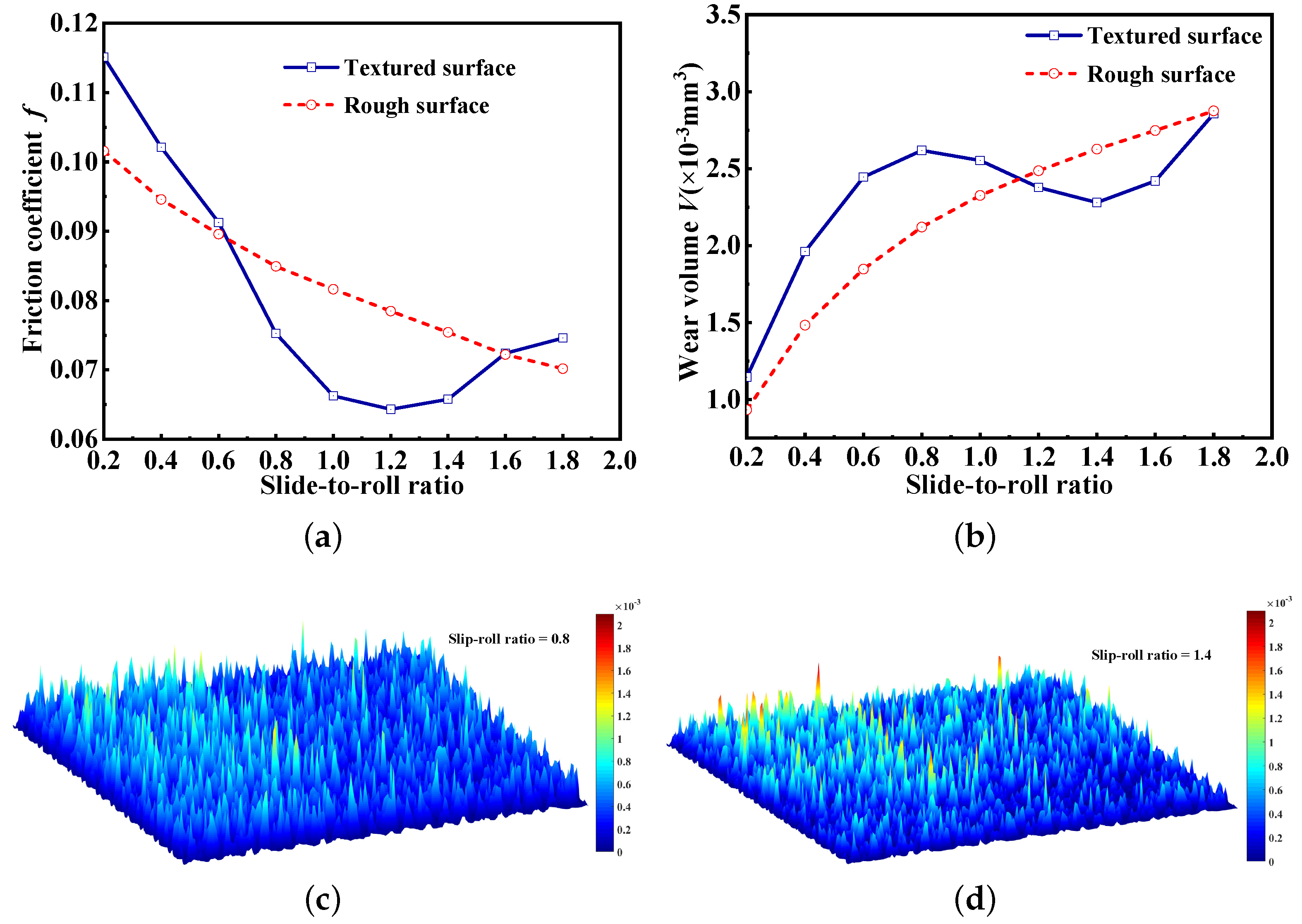
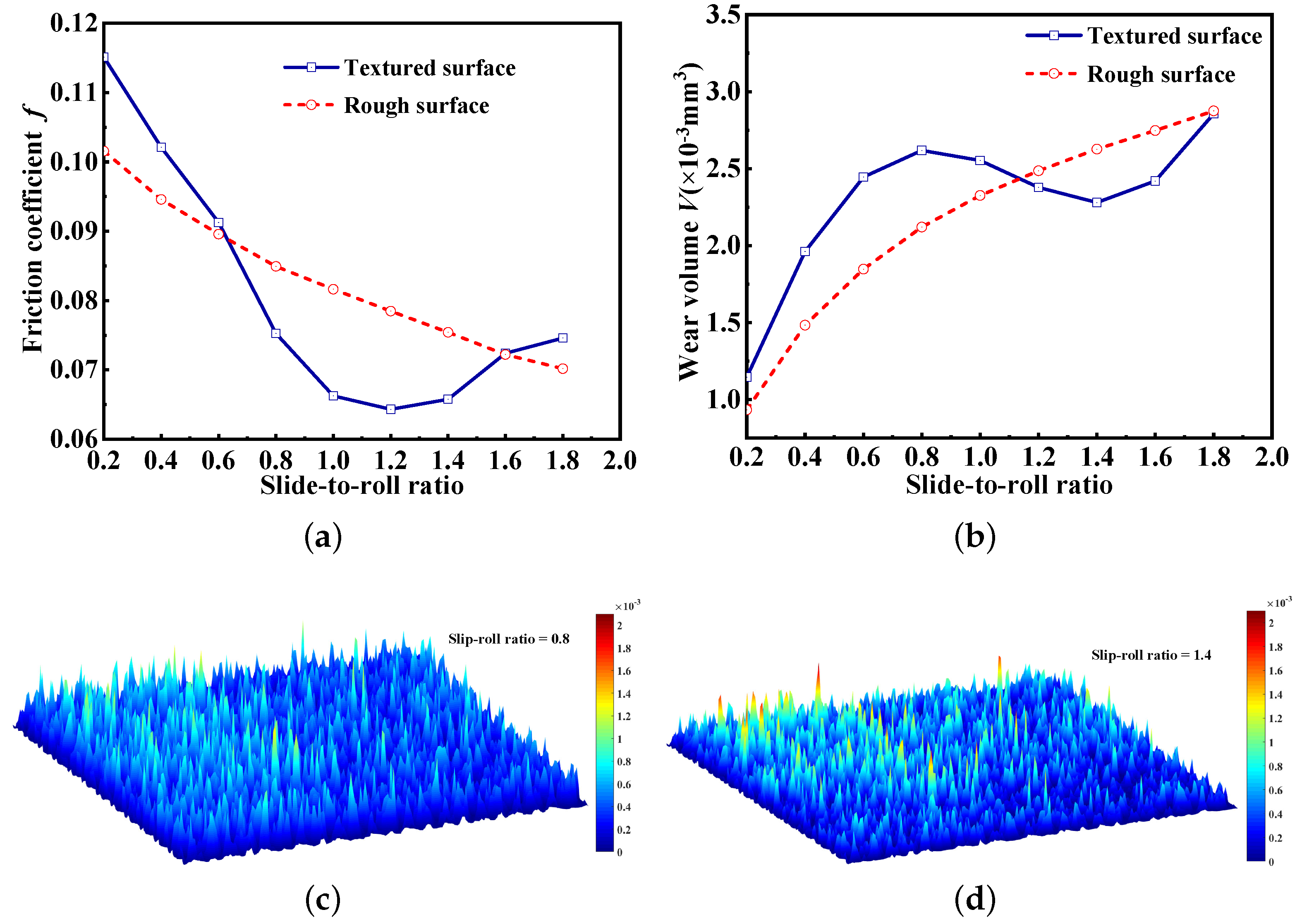
- The textured snakeskin surface can achieve a smaller friction coefficient compared to the rough surface at a larger slide-to-roll ratio. The textured sharkskin surface achieved the minimum friction coefficient at a specific slide-to-roll ratio of 1.2 in the present study.
- By comparing all the simulation results, it can be seen that the effect of biomimetic texture on the characteristics of the surfaces has a strong relationship with the working and contact conditions. The physical properties of the textured surfaces tend to degrade under some conditions.
- The current work only studied the tribological properties of the two bionic surfaces under fixed loads, but in the actual position of a train, the loads change and there may be better surface textures, so future research will consider the friction and wear properties of other new textured surfaces under varying loads.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| EHL | elastohydrodynamic lubrication |
| GT | Greenwood and Tripp |
| independent random phase angle | |
| spectral density function | |
| autocorrelation function | |
| composite roughness | |
| correlation length coefficients in x- and y-directions, respectively | |
| height of the non-textured surface | |
| coordinates of the textured surface’s center | |
| l | edge length of the textured surface |
| height of the final textured surface and bar-shaped protrusions, respectively | |
| centerline of the bar-shaped protrusions | |
| d | half-width of the bar-shaped protrusions |
| lubrication gap | |
| hydrodynamic pressure | |
| density of the lubricant | |
| viscosity of the lubricant | |
| u | entrainment velocity |
| W | external load |
| p | transient pressure |
| composite elastic modulus | |
| radius of asperity | |
| D | density of asperity |
| k | wear coefficient of the contact surfaces |
| hardness of the contact surfaces | |
| dimensions of the grid | |
| boundary and area of the solution domain, respectively | |
| areal density | |
| f | friction coefficient |
References
- Sun, J.; Sial, M.S.; Deng, D.; Saxunova, D.; Haider, A.; Khan, M.A. The Significance of Urban Rail Transit Systems in Mitigating Air Pollution Effects: The Case of China. Sustainability 2022, 14, 13944. [Google Scholar] [CrossRef]
- Gao, Z.; Yang, L. CORRECTION to: Energy-saving operation approaches for urban rail transit systems. Front. Eng. Manag. 2022, 9, 698. [Google Scholar] [CrossRef]
- Wang, Z.; Allen, P.; Mei, G.; Wang, R.; Yin, Z.; Zhang, W. Influence of wheel-polygonal wear on the dynamic forces within the axle-box bearing of a high-speed train. Veh. Syst. Dyn. 2020, 58, 1385–1406. [Google Scholar] [CrossRef]
- Wu, Z.; Bao, H.; Xing, Y.; Liu, L. Tribological characteristics and advanced processing methods of textured surfaces: A review. Int. J. Adv. Manuf. Technol. 2021, 114, 1241–1277. [Google Scholar] [CrossRef]
- Greiner, C.; Schäfer, M. Bio-inspired scale-like surface textures and their tribological properties. Bioinspirat. Biomimet. 2015, 10, 044001. [Google Scholar] [CrossRef]
- Guo, P.; Zhang, K.; Yasuda, Y.; Yang, W.; Galipon, J.; Rival, D.E. On the influence of biomimetic shark skin in dynamic flow separation. Bioinspirat. Biomimet. 2021, 16, 034001. [Google Scholar] [CrossRef]
- Li, X.; Deng, J.; Yue, H.; Ge, D.; Zou, X. Wear performance of electrohydrodynamically atomized WS2 coatings deposited on biomimetic shark-skin textured surfaces. Tribol. Int. 2019, 134, 240–251. [Google Scholar] [CrossRef]
- Rong, W.; Zhang, H.; Zhang, T.; Mao, Z.; Liu, X.; Song, K. Drag Reduction Using Lubricant-Impregnated Anisotropic Slippery Surfaces Inspired by Bionic Fish Scale Surfaces Containing Micro-/Nanostructured Arrays. Adv. Eng. Mater. 2021, 23, 2000821. [Google Scholar] [CrossRef]
- Domel, A.G.; Saadat, M.; Weaver, J.C.; Haj-Hariri, H.; Bertoldi, K.; Lauder, G.V. Shark skin-inspired designs that improve aerodynamic performance. J. R. Soc. Interface 2018, 15, 20170828. [Google Scholar] [CrossRef]
- Ballesteros, L.M.; Zuluaga, E.; Cuervo, P.; Rudas, J.S.; Toro, A. Tribological behavior of polymeric 3D-printed surfaces with deterministic patterns inspired in snake skin morphology. Surf. Topogr. Metrol. Prop. 2021, 9, 014002. [Google Scholar] [CrossRef]
- Tsipenyuk, A.; Varenberg, M. Use of biomimetic hexagonal surface texture in friction against lubricated skin. J. R. Soc. Interface 2014, 11, 20140113. [Google Scholar] [CrossRef]
- Li, X.; Deng, J.; Liu, L.; Zhang, L.; Sun, J.; Ge, D.; Liu, Y.; Duan, R. Tribological properties of WS2 coatings deposited on textured surfaces by electrohydrodynamic atomization. Surf. Coat. Technol. 2018, 352, 128–143. [Google Scholar] [CrossRef]
- Hsu, S.M.; Jing, Y.; Zhao, F. Self-adaptive surface texture design for friction reduction across the lubrication regimes. Surf. Topogr. Metrol. Prop. 2015, 4, 014004. [Google Scholar] [CrossRef]
- Grützmacher, P.G.; Profito, F.J.; Rosenkranz, A. Multi-scale surface texturing in tribology—Current knowledge and future perspectives. Lubricants 2019, 7, 95. [Google Scholar] [CrossRef]
- Rosenkranz, A.; Grützmacher, P.G.; Murzyn, K.; Mathieu, C.; Mücklich, F. Multi-scale surface patterning to tune friction under mixed lubricated conditions. Appl. Nanosci. 2021, 11, 751–762. [Google Scholar] [CrossRef]
- Hu, Y.Z.; Zhu, D. A Full Numerical Solution to the Mixed Lubrication in Point Contacts. J. Tribol. 2000, 122, 1–9. [Google Scholar] [CrossRef]
- Wang, Q.J.; Zhu, D. Virtual Texturing: Modeling the Performance of Lubricated Contacts of Engineered Surfaces. J. Tribol. 2005, 127, 722–728. [Google Scholar] [CrossRef]
- Xiang, G.; Yang, T.; Guo, J.; Wang, J.; Liu, B.; Chen, S. Optimization transient wear and contact performances of water-lubricated bearings under fluid-solid-thermal coupling condition using profile modification. Wear 2022, 502, 204379. [Google Scholar] [CrossRef]
- Cai, J.; Xiang, G.; Li, S.; Guo, J.; Wang, J.; Chen, S.; Yang, T. Mathematical modeling for nonlinear dynamic mixed friction behaviors of novel coupled bearing lubricated with low-viscosity fluid. Phys. Fluids 2022, 34, 093612. [Google Scholar] [CrossRef]
- Zhong, Y.; Zheng, L.; Gao, Y.; Liu, Z. Numerical simulation and experimental investigation of tribological performance on bionic hexagonal textured surface. Tribol. Int. 2019, 129, 151–161. [Google Scholar] [CrossRef]
- König, F.; Rosenkranz, A.; Grützmacher, P.G.; Mücklich, F.; Jacobs, G. Effect of single-and multi-scale surface patterns on the frictional performance of journal bearings–a numerical study. Tribol. Int. 2020, 143, 106041. [Google Scholar] [CrossRef]
- Wu, J.J. Simulation of rough surfaces with FFT. Tribol. Int. 2000, 33, 47–58. [Google Scholar] [CrossRef]
- Ren, N.; Zhu, D.; Chen, W.W.; Liu, Y.; Wang, Q.J. A Three-Dimensional Deterministic Model for Rough Surface Line-Contact EHL Problems. Am. Soc. Mech. Eng. 2009, 131, 011501. [Google Scholar] [CrossRef]
- Chun, S.M.; Khonsari, M.M. Wear simulation for the journal bearings operating under aligned shaft and steady load during start-up and coast-down conditions. Tribol. Int. 2016, 97, 440–466. [Google Scholar] [CrossRef]
- Liu, B.; Bruni, S.; Lewis, R. Numerical calculation of wear in rolling contact based on the Archard equation: Effect of contact parameters and consideration of uncertainties. Wear 2022, 490, 204188. [Google Scholar] [CrossRef]
- Beheshti, A.; Khonsari, M. An engineering approach for the prediction of wear in mixed lubricated contacts. Wear 2013, 308, 121–131. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Snakeskin | Sharkskin | ||
|---|---|---|---|
| Parameter | Value | Parameter | Value |
| Density | 20% | Density | 35% |
| Length | 30 m | Length | 30 m |
| Depth | 2 m | Depth | 2 m |
| Roughness | 1 m | Roughness | 1 m |
| Bar-shaped protrusions | 1.5 m | ||
| Parameter | Value |
|---|---|
| Groove depth | 10 m |
| Sliding speed | 1 m/s |
| Groove depth | 10 m |
| Total area | 33.21, 75.18 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Load | 1000 N | Elastic modulus | 200 GPa |
| Hardness | 4.0 GPa | Poisson’s ratio | 0.3 |
| Density | 7.865 g/ | Composite roughness | 1 m |
| Oil viscosity | 0.096 Pa/s | Speed (rolling speed) | 0.0001–3 m/s |
| Slide-to-roll ratio | 0.2–1.8 | Radius of counterbody | 60.0 mm |
| Time step | 1 s | Number of time step | 300 or 400 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Cai, J.; Cheng, G.; Wang, J.; Tang, D. Numerical Investigations of Tribological Characteristics of Biomimetic-Textured Surfaces. Sustainability 2023, 15, 13054. https://doi.org/10.3390/su151713054
Wang C, Cai J, Cheng G, Wang J, Tang D. Numerical Investigations of Tribological Characteristics of Biomimetic-Textured Surfaces. Sustainability. 2023; 15(17):13054. https://doi.org/10.3390/su151713054
Chicago/Turabian StyleWang, Cheng, Jianlin Cai, Gong Cheng, Jiaxu Wang, and Dongxing Tang. 2023. "Numerical Investigations of Tribological Characteristics of Biomimetic-Textured Surfaces" Sustainability 15, no. 17: 13054. https://doi.org/10.3390/su151713054
APA StyleWang, C., Cai, J., Cheng, G., Wang, J., & Tang, D. (2023). Numerical Investigations of Tribological Characteristics of Biomimetic-Textured Surfaces. Sustainability, 15(17), 13054. https://doi.org/10.3390/su151713054