

A Highway On-Ramp Control Approach Integrating Percolation Bottleneck Analysis and Vehicle Source Identification


Abstract
:1. Introduction
- (1)
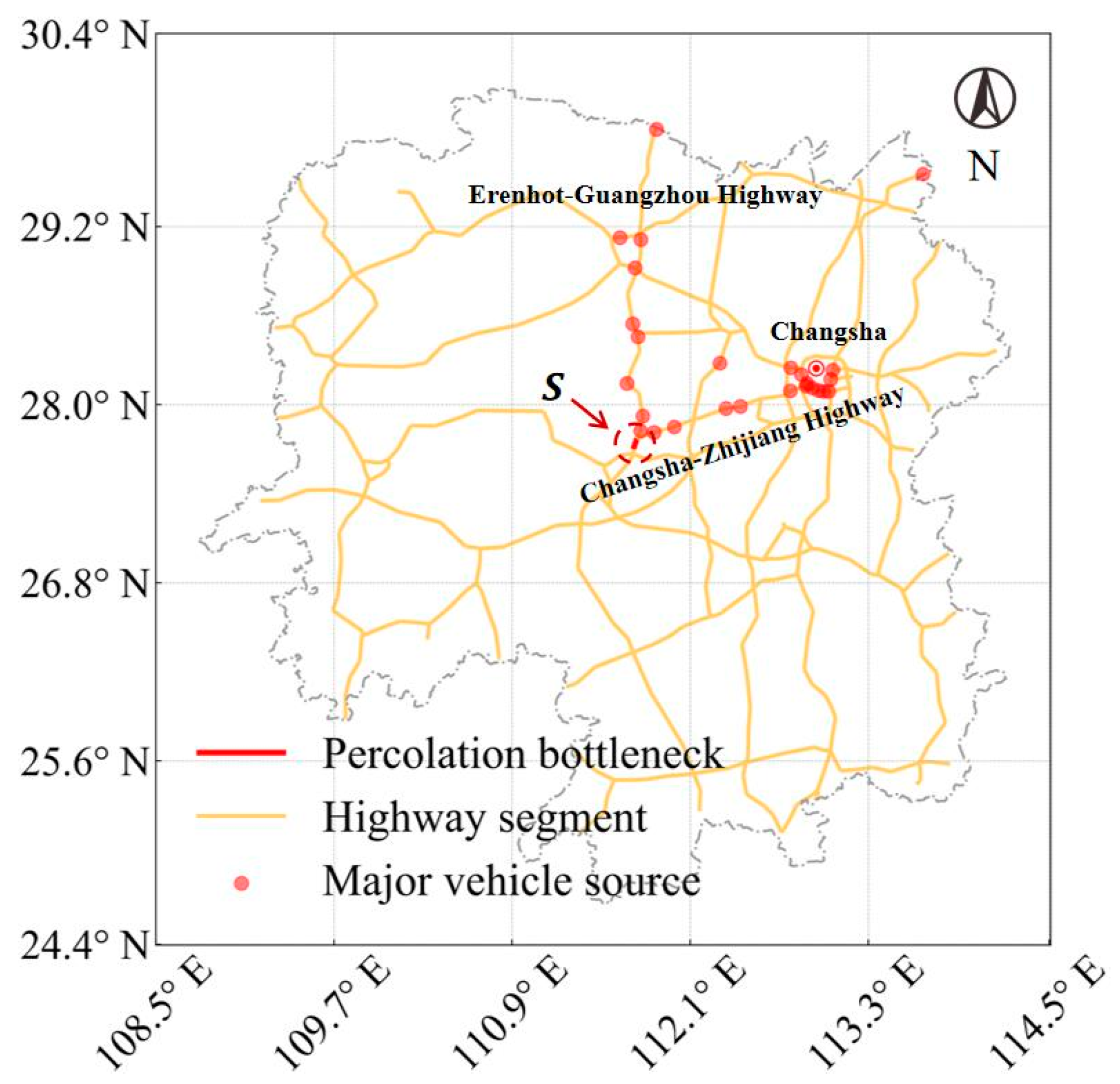
- Existing methods usually located the highway bottlenecks based on each highway segment’s traffic state (e.g., traffic speed, traffic flow), paying less attention to the segment’s role in maintaining the functional connectivity of the highway network. In the present study, we employed the network percolation approach to identify the highway bottleneck. The service level of the highway network could be considerably enhanced by slightly reducing the congestion of the identified bottleneck;
- (2)
- Existing on-ramp control approaches were, in general, developed for small theoretical networks or localized highway segments. In the present study, we filled the research gap by pinpointing the major vehicle sources of the bottleneck segment and developing a targeted on-ramp control approach applicable to large-scale highway networks based on the major vehicle source information.
2. Literature Review
3. Data
3.1. Highway Network Data
3.2. Travel Demand Data
4. Methods
4.1. Network Percolation Approach
4.2. Traffic Flow Simulation
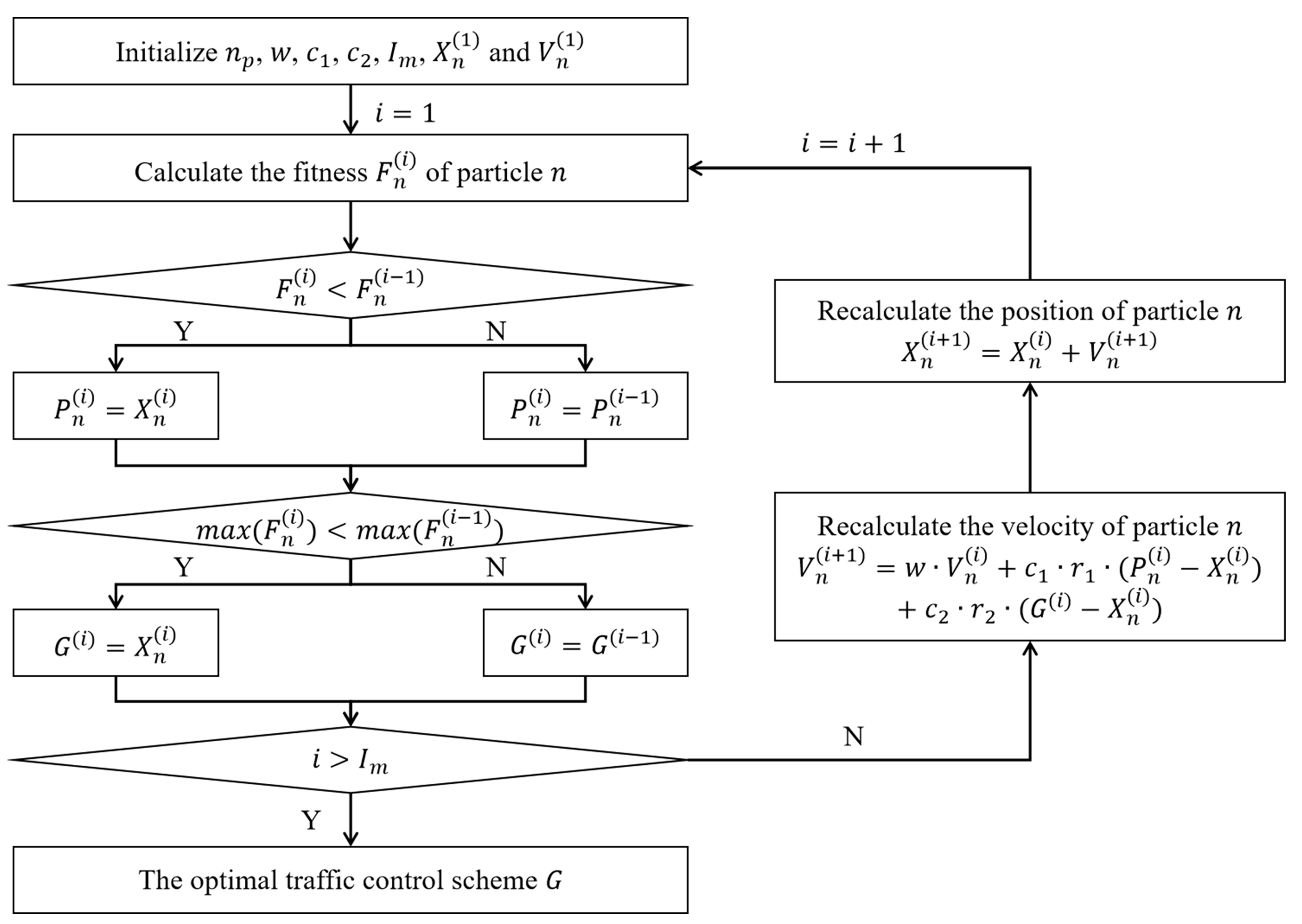
4.3. Percolation-Bottleneck-Based on-Ramp Control Approach
5. Results
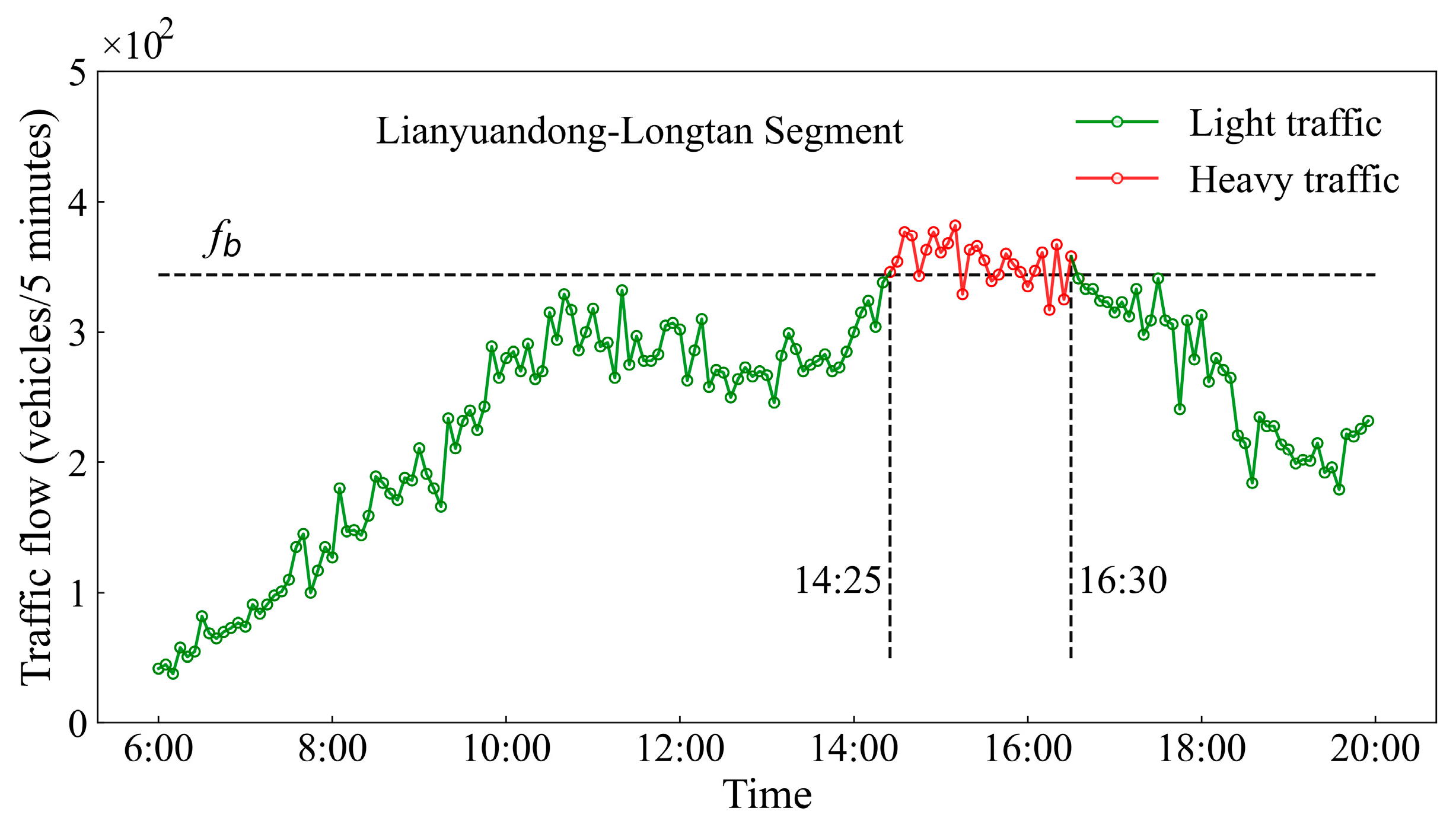
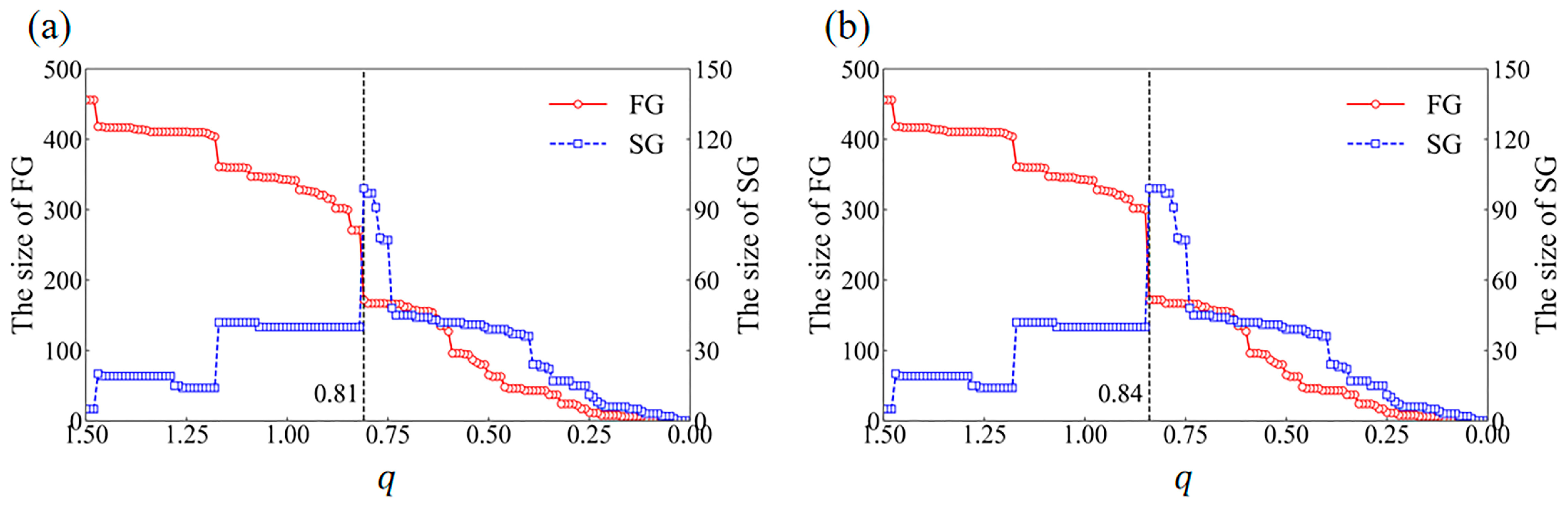
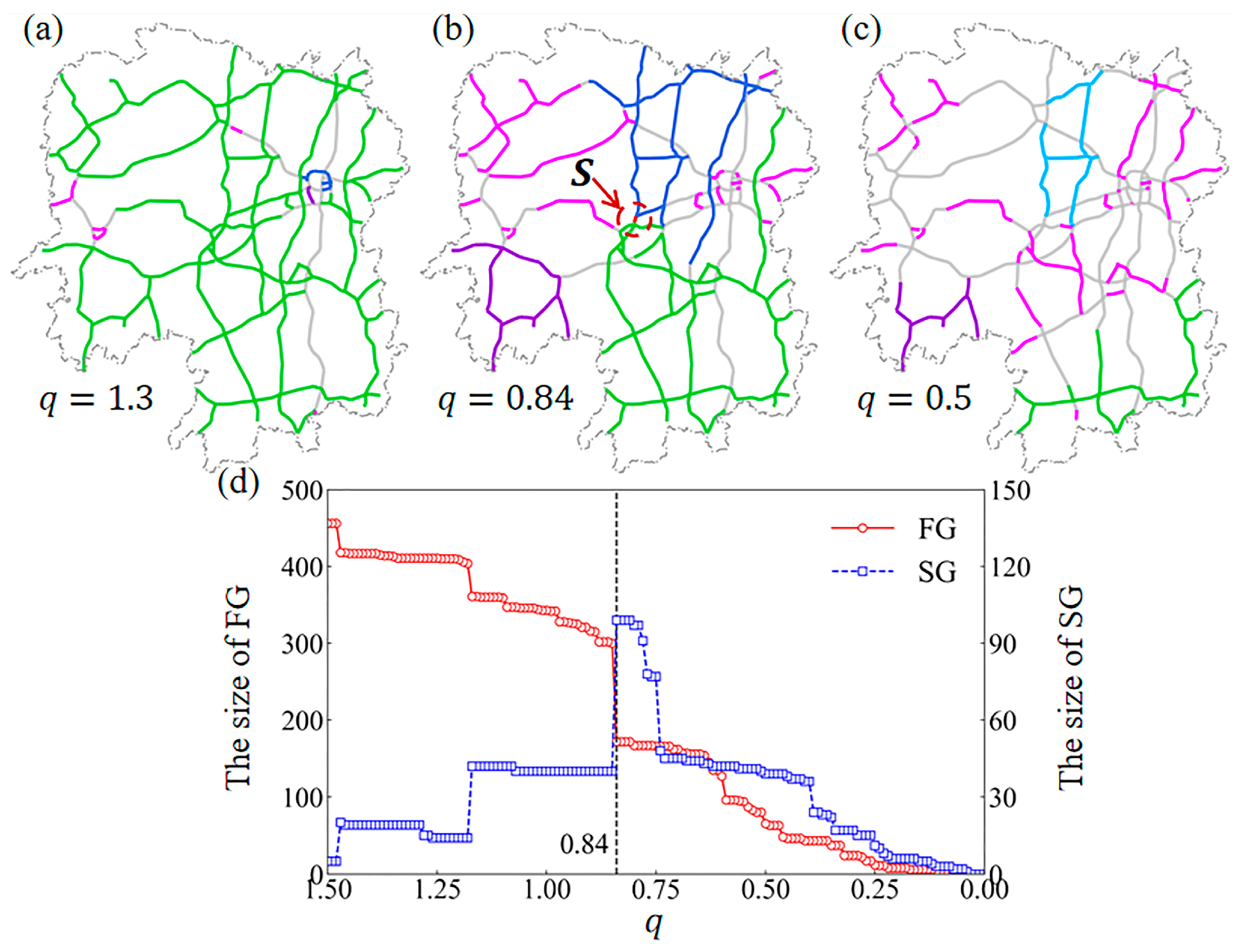
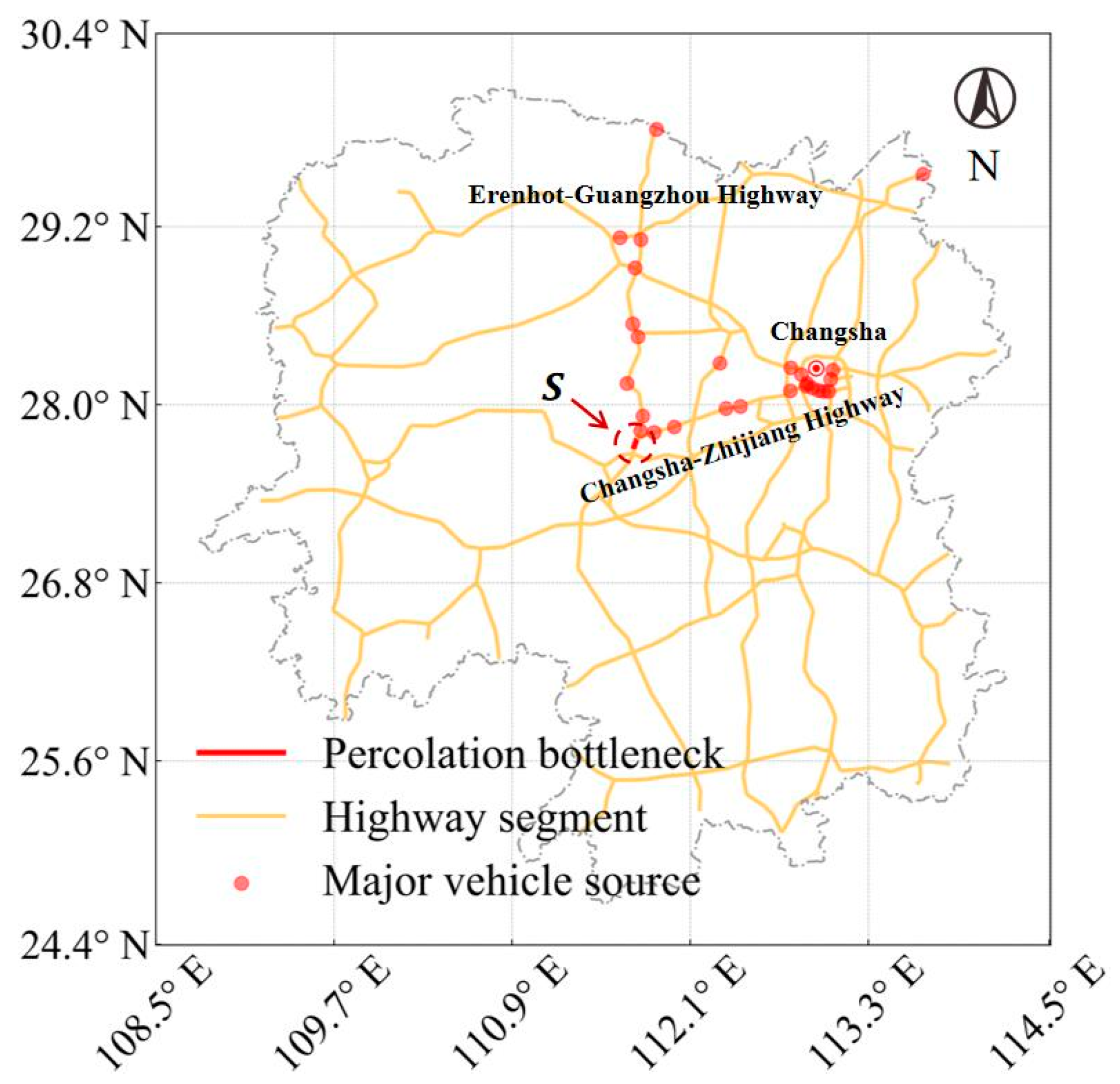
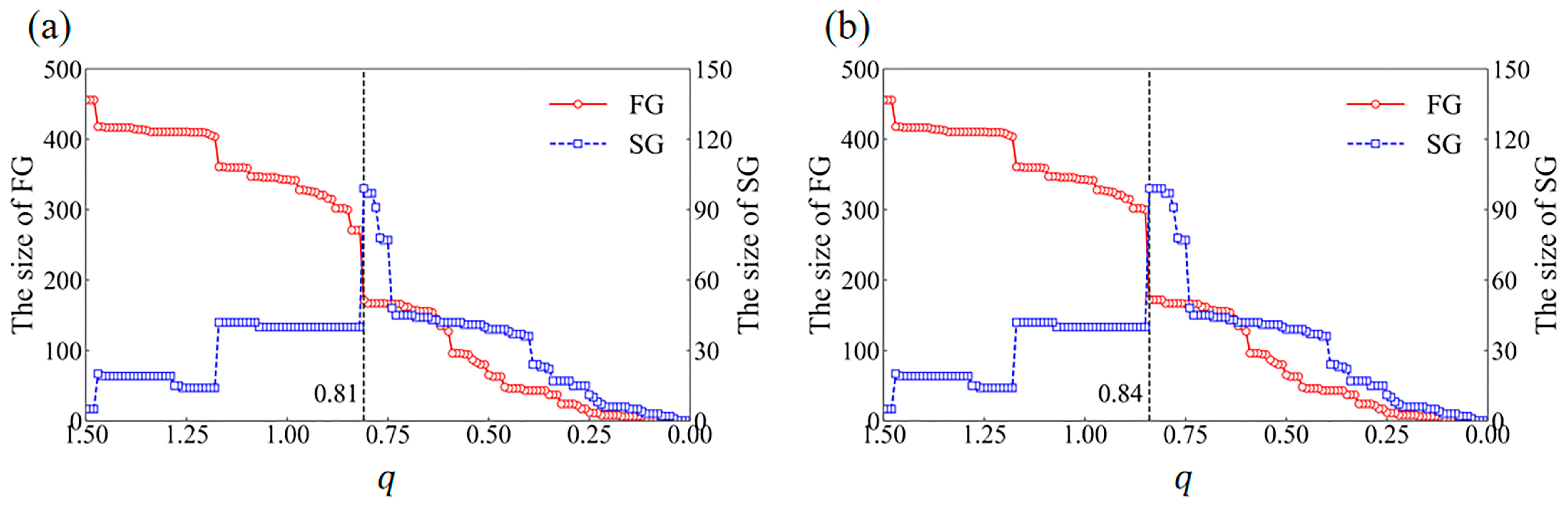
5.1. Identifying the Percolation Bottleneck
5.2. Generating the Traffic Control Scheme
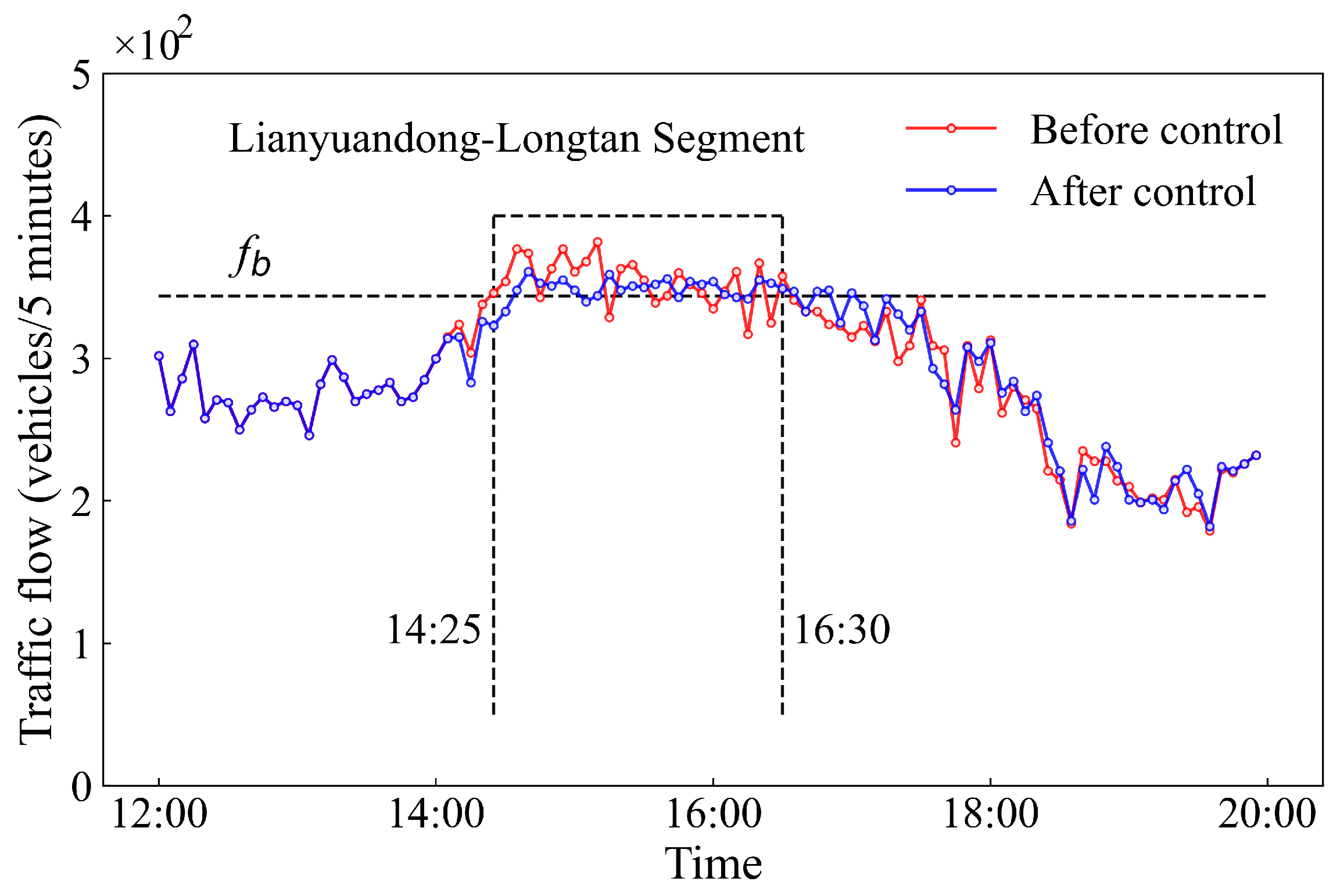
5.3. Evaluating the Generated Traffic Control Scheme
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Chang, Y.; Wang, S.; Zhou, Y.; Wang, L.; Wang, F. A novel method of evaluating highway traffic prosperity based on nighttime light remote sensing. Remote Sens. 2019, 12, 102. [Google Scholar] [CrossRef]
- Chen, J.; Yu, Y.; Guo, Q. Freeway traffic congestion reduction and environment regulation via model predictive control. Algorithms 2019, 12, 220. [Google Scholar] [CrossRef]
- Karaer, A.; Ulak, M.B.; Ozguven, E.E.; Sando, T. Reducing the non-recurrent freeway congestion with detour operations: Case study in Florida. Transp. Eng. 2020, 2, 100026. [Google Scholar] [CrossRef]
- Yu, M.; Fan, W.D. Optimal variable speed limit control in connected autonomous vehicle environment for relieving freeway congestion. J. Transp. Eng. Part A Syst. 2019, 145, 04019007. [Google Scholar] [CrossRef]
- Han, Y.; Wang, M.; Li, L.; Roncoli, C.; Gao, J.; Liu, P. A physics-informed reinforcement learning-based strategy for local and coordinated ramp metering. Transp. Res. Part C Emerg. Technol. 2022, 137, 103584. [Google Scholar] [CrossRef]
- Ma, M.; Liang, S. An optimization approach for freeway network coordinated traffic control and route guidance. PLoS ONE 2018, 13, 0204255. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, J.; Xu, L.; Li, L.; Ran, B. A new solution for freeway congestion: Cooperative speed limit control using distributed reinforcement learning. IEEE Access 2019, 7, 41947–41957. [Google Scholar] [CrossRef]
- Wang, X.; Qiu, T.Z.; Niu, L.; Zhang, R.; Wang, L. A micro-simulation study on proactive coordinated ramp metering for relieving freeway congestion. Can. J. Civ. Eng. 2016, 43, 599–608. [Google Scholar] [CrossRef]
- Gould, C.; Rayman, N.; McCabe, K.; Schofield, M.; Hermans, F.; Munro, P.; Papageorgiou, M. Ramp metering development in a UK context. In Proceedings of the 12th IEE International Conference on Road Transport Information and Control (RTIC), London, UK, 20–22 April 2004; IET: London, UK, 2004; pp. 145–148. [Google Scholar]
- Owens, D.; Schonfield, M.J. Access Control on the M6 Motorway: Evaluation of Britain’s First Ramp Metering Scheme; Traffic Engineering & Control; Hemming Group, Limited: London, UK, 1988; Volume 29. [Google Scholar]
- Papageorgiou, M.; Hadj-Salem, H.; Middelham, F. ALINEA local ramp metering: Summary of field results. Transp. Res. Rec. 1997, 1603, 90–98. [Google Scholar] [CrossRef]
- Papageorgiou, M.; Haj-Salem, H. A low cost tool for freeway ramp metering. IFAC Proc. Vol. 1995, 28, 49–54. [Google Scholar] [CrossRef]
- Buijn, H.; Middelham, F. Ramp metering control in the netherlands. In Proceedings of the Third International Conference on Road Traffic Control, London, UK, 22–24 March 1990; IET: London, UK, 2002; pp. 199–203. [Google Scholar]
- Pera, R.L.; Nenzi, R. TANA—An operating surveillance system for highway traffic control. Proc. IEEE 1973, 61, 542–556. [Google Scholar] [CrossRef]
- Yoshino, T.; Sasaki, T.; Hasegawa, T. The traffic-control system on the hanshin expressway. Interfaces 1995, 25, 94–108. [Google Scholar] [CrossRef]
- Yukimoto, T.; Okushima, M.; Uno, N.; Daito, T. Evaluation of On Ramp Metering on Hanshin Expressway Using Traffic Simulator (HEROINE). In Proceedings of the 9th World Congress on Intelligent Transport Systems, Chicago, IL, USA, 14–17 October 2002. [Google Scholar]
- Paesani, G.F. System wide adaptive ramp metering in southern California. In Proceedings of the ITS America 7th Annual Meeting and Exposition: Merging the Transportation and Communications Revolutions, Washington, DC, USA, 2–5 June 1997; ITS America: Washington, DC, USA, 1997. [Google Scholar]
- Thompson, N.; Greene, S. Ramp Metering for the 21st Century: Minnesota’s Experience. In Proceedings of the ITS America 7th Annual Meeting and Exposition: Merging the Transportation and Communications Revolutions, Washington, DC, USA, 2–5 June 1997; ITS America: Washington DC, USA, 1997. [Google Scholar]
- Papamichail, I.; Papageorgiou, M.; Vong, V.; Gaffney, J. Heuristic Ramp-Metering Coordination Strategy Implemented at Monash Freeway, Australia. Transp. Res. Rec. 2010, 2178, 10–20. [Google Scholar] [CrossRef]
- Wei, J.; Long, K.; Gu, J.; Zhou, Z.; Li, S. Freeway ramp metering based on PSO-PID control. PLoS ONE 2021, 16, e0260977. [Google Scholar] [CrossRef] [PubMed]
- Abuamer, I.M.; Silgu, M.A.; Celikoglu, H.B. Micro-simulation based ramp metering on Istanbul freeways: An evaluation adopting ALINEA. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; IEEE: London, UK, 2016; pp. 695–700. [Google Scholar]
- Smaragdis, E.; Papageorgiou, M.; Kosmatopoulos, E. A flow-maximizing adaptive local ramp metering strategy. Transp. Res. Part B Methodol. 2004, 38, 251–270. [Google Scholar] [CrossRef]
- Xu, J.; Zhao, X.; Srinivasan, D. On optimal freeway local ramp metering using fuzzy logic control with particle swarm optimisation. IET Intell. Transp. Syst. 2013, 7, 95–104. [Google Scholar] [CrossRef]
- Smaragdis, E.; Papageorgiou, M. Series of new local ramp metering strategies. Transp. Res. Rec. 2003, 1856, 74–86. [Google Scholar] [CrossRef]
- Papamichail, I.; Kotsialos, A.; Margonis, I.; Papageorgiou, M. Coordinated ramp metering for freeway networks—A model-predictive hierarchical control approach. Transp. Res. Part C Emerg. Technol. 2010, 18, 311–331. [Google Scholar] [CrossRef]
- Zhang, H.M.; Ritchie, S.G.; Jayakrishnan, R. Coordinated traffic-responsive ramp control via nonlinear state feedback. Transp. Res. Part C Emerg. Technol. 2001, 9, 337–352. [Google Scholar] [CrossRef]
- Greguric, M.; Ivanjko, E.; Mandzuka, S. A Neuro-fuzzy Based Approach to Cooperative Ramp Metering. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015; IEEE: London, UK, 2015; pp. 54–59. [Google Scholar]
- Peng, C.; Xu, C. A coordinated ramp metering framework based on heterogeneous causal inference. Comput. -Aided Civil Infrastruct. Eng. 2023, 38, 1365–1380. [Google Scholar] [CrossRef]
- Sun, X.; Munoz, L.; Horowitz, R. Highway traffic state estimation using improved mixture Kalman filters for effective ramp metering control. In Proceedings of the 42nd IEEE International Conference on Decision and Control (IEEE Cat. No.03CH37475), Maui, HI, USA, 9–12 December 2003; IEEE: London, UK, 2015; pp. 6333–6338. [Google Scholar]
- Benmohamed, L.; Meerkov, S.M. Feedback control of highway congestion by a fair on-ramp metering. In Proceedings of the 1994 33rd IEEE Conference on Decision and Control, Lake Buena Vista, FL, USA, 14–16 December 1994; IEEE: London, UK, 2015; pp. 2437–2442. [Google Scholar]
- Li, M.; Yang, H.; Guo, B.; Dai, J.; Wang, P. Driver source-based traffic control approach for mitigating congestion in freeway bottlenecks. J. Adv. Transp. 2022, 2022, 3536979. [Google Scholar] [CrossRef]
- Liu, H.X.; Danczyk, A. Optimal sensor locations for freeway bottleneck identification. Comput. -Aided Civil Infrastruct. Eng. 2009, 24, 535–550. [Google Scholar] [CrossRef]
- Asgharzadeh, M.; Gubbala, P.S.; Kondyli, A.; Schrock, S.D. Effect of on-ramp demand and flow distribution on capacity at merge bottleneck locations. Transp. Lett. 2020, 12, 550–558. [Google Scholar] [CrossRef]
- Margiotta, R.A.; Snyder, D. An Agency Guide on How to Establish Localized Congestion Mitigation Programs (No. FHWA-HOP-11-009); Federal Highway Administration, Office of Operations: Washington, DC, USA, 2011.
- Kondyli, A.; Hale, D.K.; Asgharzadeh, M.; Schroeder, B.; Jia, A.; Bared, J. Evaluating the operational effect of narrow lanes and shoulders for the highway capacity manual. Transp. Res. Rec. 2019, 2673, 558–570. [Google Scholar] [CrossRef]
- Zhang, L.; Levinson, D. Ramp metering and freeway bottleneck capacity. Transp. Res. Part A Policy Pract. 2010, 44, 218–235. [Google Scholar] [CrossRef]
- Kerner, B.S. Control of spatiotemporal congested traffic patterns at highway bottlenecks. IEEE Trans. Intell. Transp. Syst. 2007, 8, 308–320. [Google Scholar] [CrossRef]
- Ma, M.H.; Yang, Q.F.; Liangand, S.D.; Li, Z.L. Integrated Variable Speed Limits Control and Ramp Metering for Bottleneck Regions on Freeway. Math. Probl. Eng. 2015, 2015, 313089. [Google Scholar] [CrossRef]
- Bertini, R.L.; Myton, A. Using PeMS data to empirically diagnose freeway bottleneck locations in Orange County, California. Transp. Res. Rec. J. Transp. Res. Board 2005, 1925, 48–57. [Google Scholar] [CrossRef]
- Florida Department of Transportation. SIS Bottleneck Study (Technical Memorandum No. 2—Methodology to Identify Bottlenecks); Florida Department of Transportation: Tallahassee, FL, USA, 2011.
- Kerner, B.S. Theory of breakdown phenomenon at highway bottlenecks. Transp. Res. Rec. 2000, 1710, 136–144. [Google Scholar] [CrossRef]
- Ban, X.; Chu, L.; Benouar, H. Bottleneck identification and calibration for corridor management planning. Transp. Res. Rec. 2007, 1999, 40–53. [Google Scholar] [CrossRef]
- Margiotta, R.A.; Spiller, N.C.; Systematics, C. Recurring Traffic Bottlenecks: A primer: Focus on Low-Cost Operational Improvements (No. FHWA-HOP-09-037); Federal Highway Administration: Washington, DC, USA, 2009.
- Chen, C.; Skabardonis, A.; Varaiya, P. Systematic identification of freeway bottlenecks. Transp. Res. Rec. 2004, 1867, 46–52. [Google Scholar] [CrossRef]
- Zhang, L.; Levinson, D. Some properties of flows at freeway bottlenecks. Transp. Res. Rec. 2004, 1883, 122–131. [Google Scholar] [CrossRef]
- Gong, L.; Fan, W. Applying travel-time reliability measures in identifying and ranking recurrent freeway bottlenecks at the network level. J. Transp. Eng. Part A Syst. 2017, 143, 04017042. [Google Scholar] [CrossRef]
- Bertini, R.L.; Fernandez, R.; Wieczorek, J.; Li, H. Using archived ITS data to automatically identify freeway bottlenecks in Portland, Oregon. In Proceedings of the 15th World Congress on ITS, New York, NY, USA, 16–20 November 2008. [Google Scholar]
- Jose, R.; Mitra, S. Identifying and classifying highway bottlenecks based on spatial and temporal variation of speed. J. Transp. Eng. Part A Syst. 2018, 144, 04018075. [Google Scholar] [CrossRef]
- Cellai, D.; López, E.; Zhou, J.; Gleeson, J.P.; Bianconi, G. Percolation in multiplex networks with overlap. Phys. Rev. E 2013, 88, 052811. [Google Scholar] [CrossRef] [PubMed]
- Wu, R.; Guo, S.; Yang, B.; Li, D. Improvement of traffic percolation based on bottlenecks. In Proceedings of the 2017 2nd International Conference on System Reliability and Safety (ICSRS), Milan, Italy, 20–22 December 2017; IEEE: New York, NY, USA, 2018; pp. 41–46. [Google Scholar]
- He, Y.; Xu, Z.; Zhao, Y.; Tsui, K.L. Dynamic Evolution Analysis of Metro Network Connectivity and Bottleneck Identification: From the Perspective of Individual Cognition. IEEE Access 2019, 7, 2042–2052. [Google Scholar] [CrossRef]
- Li, D.; Fu, B.; Wang, Y.; Lu, G.; Berezin, Y.; Stanley, H.E.; Havlin, S. Percolation transition in dynamical traffic network with evolving critical bottlenecks. Proc. Natl. Acad. Sci. USA 2015, 112, 669–672. [Google Scholar] [CrossRef]
- Lv, S.; Yang, H.; Zhang, F.; Wang, P. Identifying the bottlenecks of urban metros and analyzing the passenger source. In Proceedings of the 22nd COTA International Conference of Transportation Professionals (CICTP), Changsha, China, 8–11 July 2022; ASCE: Reston, VA, USA, 2022; pp. 2625–2635. [Google Scholar]
- Li, M.; Liu, R.R.; Lü, L.; Hu, M.B.; Xu, S.; Zhang, Y.C. Percolation on complex networks: Theory and Application. Phys. Rep. -Rev. Sec. Phys. Lett. 2021, 907, 1–68. [Google Scholar]
- Yang, G.; Tian, Z.; Xu, H.; Wang, Z.; Wang, D. Impacts of traffic flow arrival pattern on the necessary queue storage space at metered on-ramps. Transp. A 2018, 14, 543–561. [Google Scholar] [CrossRef]
- Zhu, J.; Shi, Q. Research on vehicle speed distribution characteristics of urban expressway section and influence factors. J. Hefei Univ. Technol. 2018, 41, 95–101. [Google Scholar]
- Dijkstra, E.W. A note on two problems in connexion with graphs. In Edsger Wybe Dijkstra: His Life, Work, and Legacy, 1st ed.; Apt, K.R., Hoare, T., Eds.; ACM: New York, NY, USA, 2022; pp. 287–290. [Google Scholar]
- Yan, Y.; Wang, X.; Zhang, Y.H. Research on section operating speed distribution characteristics of expressway. China Saf. Sci. J. 2008, 18, 171–176. [Google Scholar]
- Wang, P.; Hunter, T.; Bayen, A.M.; Schechtner, K.; González, M.C. Understanding road usage patterns in urban areas. Sci. Rep. 2012, 2, 1001. [Google Scholar] [CrossRef]
- Wang, J.; Wei, D.; He, K.; Gong, K.; Wang, P. Encapsulating urban traffic rhythms into road networks. Sci. Rep. 2014, 4, 4141. [Google Scholar] [CrossRef]
- Wang, P.; Wang, C.; Lai, J.; Huang, Z.; Ma, J.; Mao, Y. Traffic control approach based on multi-source data fusion. IET Intell. Transp. Syst. 2019, 13, 764–772. [Google Scholar] [CrossRef]
- Liang, X.R.; Fan, Y.K.; Jiang, T. Application of PSO algorithm to coordinated ramp control. In Proceedings of the 2009 International Conference on Machine Learning and Cybernetics (ICMLC), Hebei, China, 12–15 July 2009; IEEE: London, UK, 2009; pp. 1712–1716. [Google Scholar]
- Fan, Y.; Liang, X. Particle swarm optimization based PI controller for freeway ramp metering. In Proceedings of the 2008 27th Chinese Control Conference (CCC), Kunming, China, 16–18 July 2008; IEEE: London, UK, 2008; pp. 503–506. [Google Scholar]
- Zhao, X.; Xu, J.; Srinivasan, D. Freeway ramp metering by macroscopic traffic scheduling with particle swarm optimization. In Proceedings of the 2013 IEEE Symposium on Computational Intelligence in Vehicles and Transportation Systems (CIVTS), Singapore, 16–19 April 2013; IEEE: London, UK, 2013; pp. 32–37. [Google Scholar]
- Wang, D.; Tan, D.; Liu, L. Particle swarm optimization algorithm: An overview. Soft Comput. 2018, 22, 387–408. [Google Scholar] [CrossRef]
- Houssein, E.H.; Gad, A.G.; Hussain, K.; Suganthan, P.N. Major advances in particle swarm optimization: Theory, analysis, and application. Swarm Evol. Comput. 2021, 63, 100868. [Google Scholar]
- Wu, X.; Zhong, M. Particle swarm optimization with hybrid velocity updating strategies. In Proceedings of the 2009 Third International Symposium on Intelligent Information Technology Application (IITA), Nanchang, China, 21–22 November 2009; IEEE: New York, NY, USA, 2009; pp. 336–339. [Google Scholar]
- Zhang, Q. Research on particle swarm optimization for grain logistics vehicle routing problem. In Proceedings of the 2009 IITA International Conference on Control, Automation and Systems Engineering (CASE), Zhangjiajie, China, 11–12 July 2009; IEEE: New York, NY, USA, 2009; pp. 212–215. [Google Scholar]
- Brandes, U. A faster algorithm for betweenness centrality. J. Math. Sociol. 2001, 25, 163–177. [Google Scholar] [CrossRef]
- JTG B01-2014; Technical Standard of Highway Engineering. Ministry of Transport of the People’s Republic of China: Beijing, China, 2014.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bottleneck | Heavy Traffic Period | Using MVS | Maximum Traffic Flow | Total Traffic Flow During Heavy Traffic Period | Critical Threshold |
|---|---|---|---|---|---|
| Percolation bottleneck | 14:25–16:30 | yes | −9.95% | −1.56% | −0.03 |
| no | −4.45% | −1.32% | −0.01 | ||
| Congested bottleneck | 13:30–17:00 | yes | 0 | −2.20% | 0 |
| no | 0 | −0.15% | 0 | ||
| Betweenness bottleneck | 14:55–16:55 | yes | −3.04% | −1.56% | 0 |
| no | −3.56% | −0.22% | 0 |
| Vehicle Speed (Mean, Standard Deviation) (km/h) | Heavy Traffic Period | Maximum Traffic Flow | Total Traffic Flow During Heavy Traffic Period | Critical Threshold |
|---|---|---|---|---|
| (88.671, 13.744) | 14:25–16:30 | −9.95% | −1.56% | −0.03 |
| (83.671, 13.744) | 14:35–17:35 | −7.37% | −0.83% | −0.02 |
| (93.671, 13.744) | 14:25–15:55 | −6.49% | −2.12% | −0.01 |
| (88.671, 8.744) | 14:25–17:25 | −7.67% | −0.74% | −0.02 |
| (88.671, 18.744) | 14:30–16:15 | −5.38% | −1.50% | −0.02 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Yang, H.; Li, M.; Dai, J.; Wang, P. A Highway On-Ramp Control Approach Integrating Percolation Bottleneck Analysis and Vehicle Source Identification. Sustainability 2023, 15, 12608. https://doi.org/10.3390/su151612608
Li S, Yang H, Li M, Dai J, Wang P. A Highway On-Ramp Control Approach Integrating Percolation Bottleneck Analysis and Vehicle Source Identification. Sustainability. 2023; 15(16):12608. https://doi.org/10.3390/su151612608
Chicago/Turabian StyleLi, Shengnan, Hu Yang, Minglun Li, Jianjun Dai, and Pu Wang. 2023. "A Highway On-Ramp Control Approach Integrating Percolation Bottleneck Analysis and Vehicle Source Identification" Sustainability 15, no. 16: 12608. https://doi.org/10.3390/su151612608
APA StyleLi, S., Yang, H., Li, M., Dai, J., & Wang, P. (2023). A Highway On-Ramp Control Approach Integrating Percolation Bottleneck Analysis and Vehicle Source Identification. Sustainability, 15(16), 12608. https://doi.org/10.3390/su151612608