

More Accurate Climate Trend Attribution by Using Cointegrating Vector Time Series Models


Abstract
1. Introduction
2. Methods for Estimating Scaling Factors
2.1. Ordinary Least Squares and Generalized Least Squares (OLS/GLS)
2.2. Total Least Squares (TLS)
2.3. A Dynamic Approach: The Cointegrating VAR(2) Model
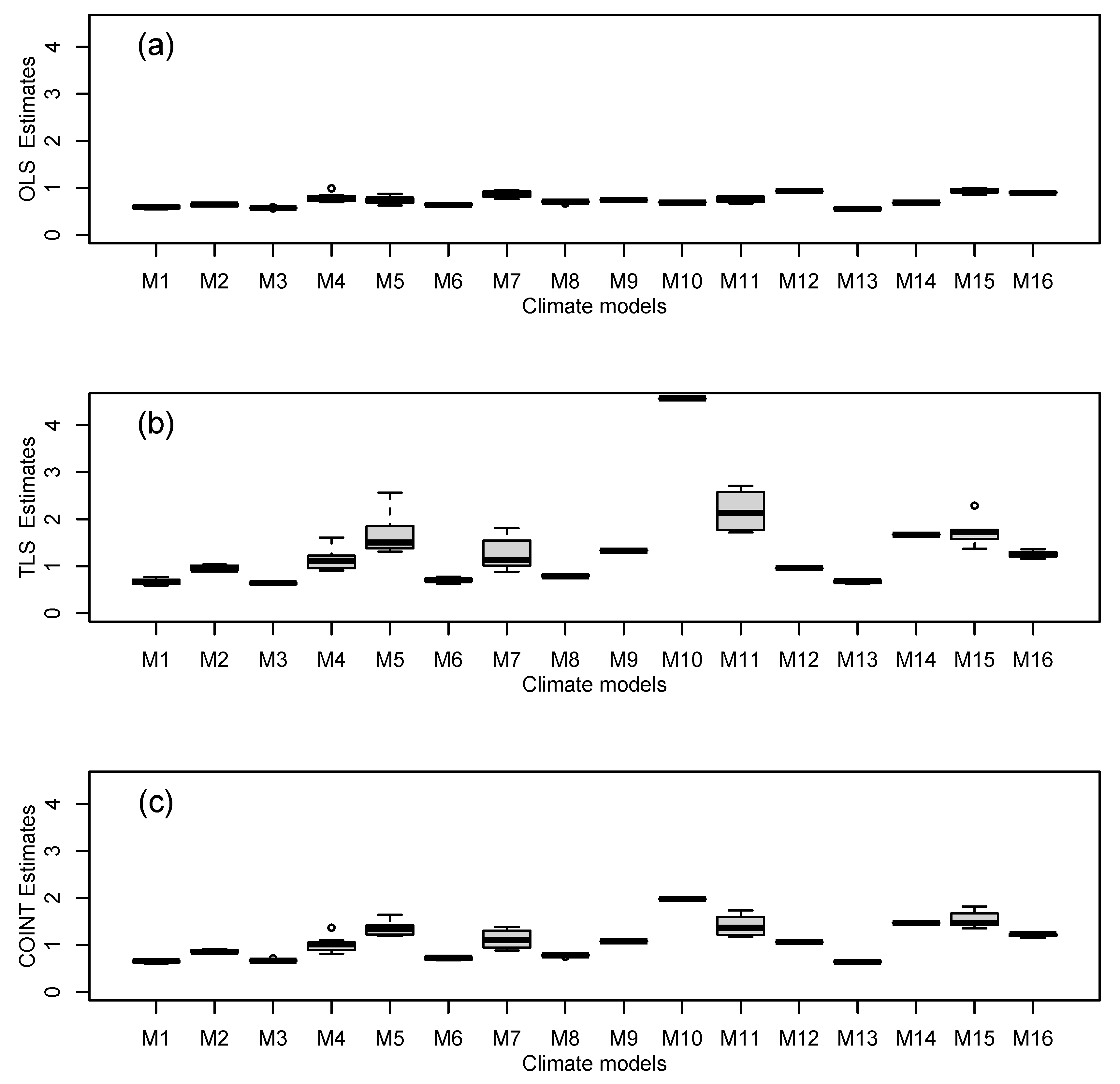
3. Results from CMIP5 Climate Model Simulations
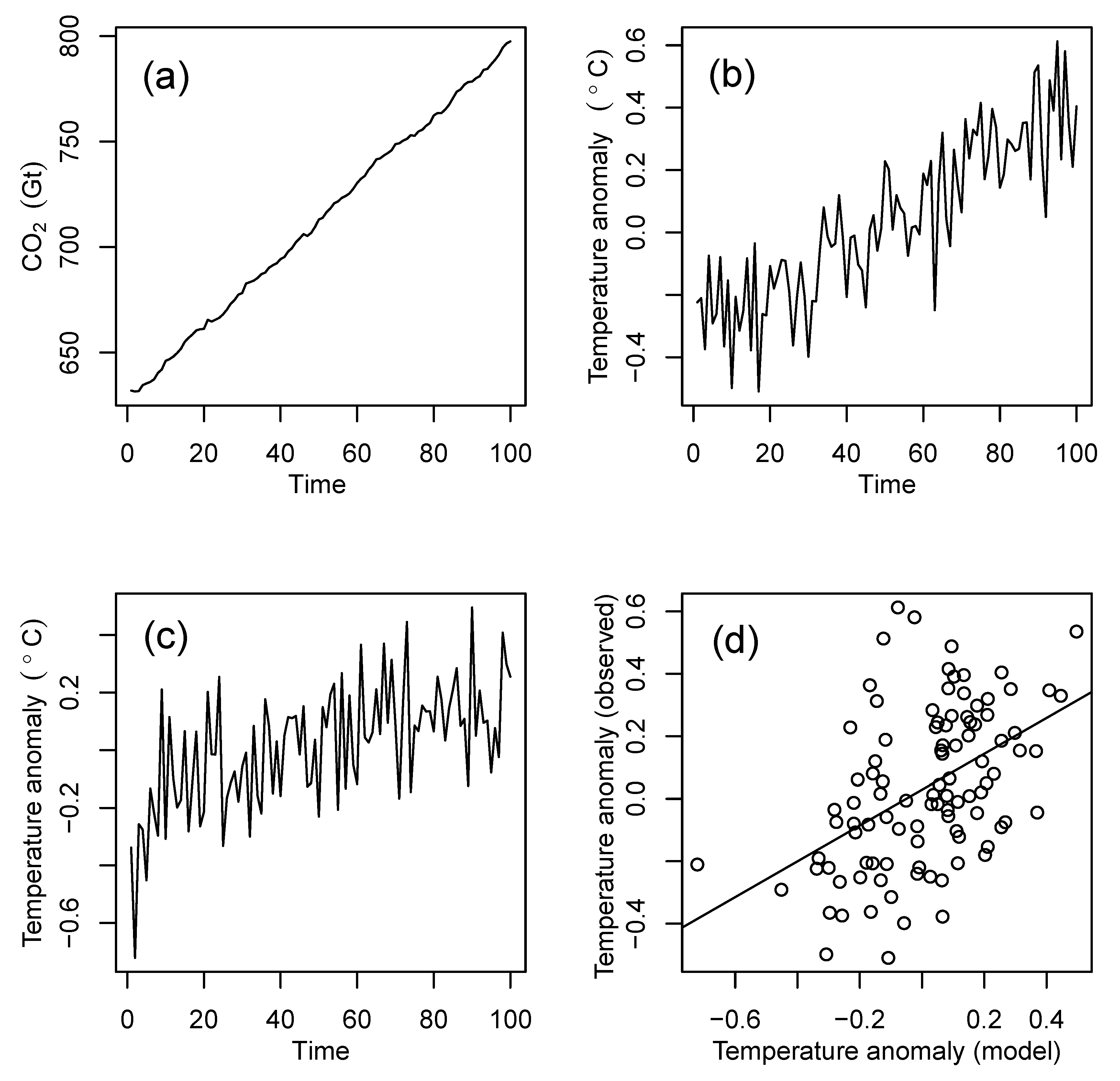
4. Results from Stochastic Carbon-Climate Model Simulations
4.1. Simple Stochastic Model of the Carbon-Climate System
4.2. Estimation of Parameters for the Stochastic Model
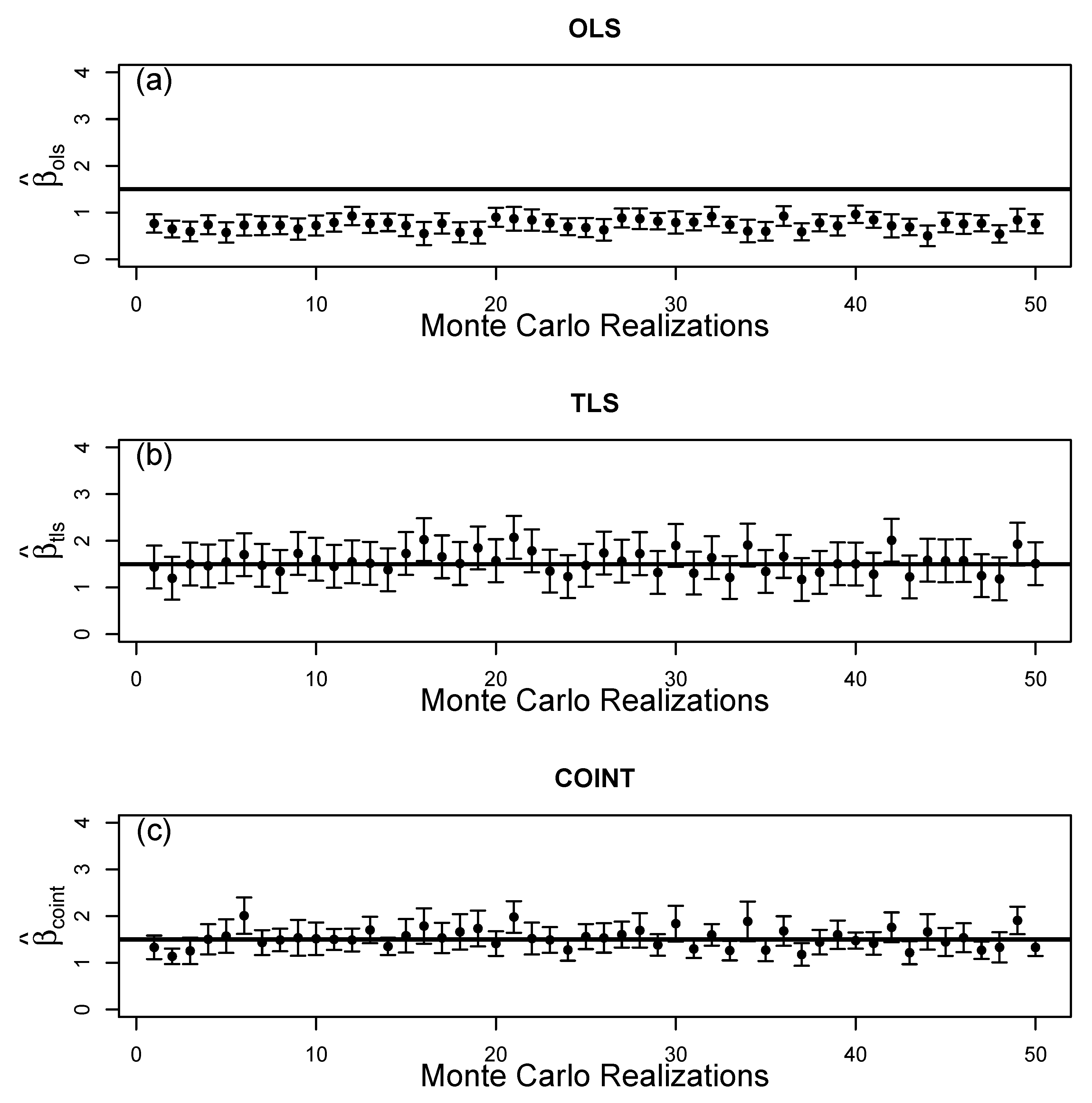
4.3. Scaling Factor Estimates from Simulated Data
5. Conclusions and Discussion
- The cointegrating VAR(2) model is a reasonable time series approach to use for modelling pairs of observed and model-simulated time series if one assumes the variables are AR(1) responses to common integrated forcing;
- Unlike OLS, which gives negatively biased estimates and TLS, which gives positively biased estimates (and large positive outliers), the cointegrating VAR(2) model gives estimates of the scaling factor that are unbiased;
- The cointegrating VAR(2) model estimates are much more accurate (in terms of MSE) than the OLS and TLS estimates;
- The TLS estimates have very large variance, which causes large MSE. They give infinite slope estimates if the sample covariance between the observed and model-simulated series is zero.
- Hypothesis tests on the VAR(2) fits for all the CMIP5 models reassuringly found strong evidence of a cointegrating relationship with the observations, as to be expected for observations and simulations responding to shared trending forcing.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Cointegrated VAR(2) Derivation
Appendix B. Software Used to Estimate the Scaling Factor
Appendix B.1. OLS Regression
Appendix B.2. TLS Regression
Appendix B.3. Cointegrated VAR(2) Model
References
- Haustein, K.; Allen, M.R.; Forster, P.M.; Otto, F.E.; Mitchell, D.M.; Matthews, H.D.; Frame, D.J. A real-time global warming index. Sci. Rep. 2017, 7, 15417. [Google Scholar] [CrossRef]
- Sutton, R.; Suckling, E.; Hawkins, E. What does global mean temperature tell us about local climate? Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2015, 373, 20140426. [Google Scholar] [CrossRef]
- Ebi, K.L.; Åström, C.; Boyer, C.J.; Harrington, L.J.; Hess, J.J.; Honda, Y.; Kazura, E.; Stuart-Smith, R.F.; Otto, F.E. Using Detection And Attribution To Quantify How Climate Change Is Affecting Health. Health Aff. 2020, 39, 2168–2174. [Google Scholar] [CrossRef]
- Hegerl, G.; Hoegh-Guldberg, O.; Casassa, G.; Hoerling, M.P.; Kovats, R.S.; Parmesan, C.; Pierce, D.W.; Stott, P.A. Good practice guidance paper on detection and attribution related to anthropogenic climate change. In Meeting Report of the Intergovernmental Panel on Climate Change Expert Meeting on Detection and Attribution of Anthropogenic Climate Change; 2010; Available online: https://www.ipcc.ch/publication/ipcc-expert-meeting-on-detection-and-attribution-related-to-anthropogenic-climate-change/ (accessed on 26 July 2023).
- Allen, M.R.; Tett, S.F.B. Checking for model consistency in optimal fingerprinting. Clim. Dyn. 1999, 15, 419–434. [Google Scholar] [CrossRef]
- Mitchell, J.F.B.; Karoly, D.J.; Hegerl, G.C.; Zwiers, F.W.; Allen, M.R.; Marengo, J. Detection of Climate Change and Attribution of Causes. In Climate Change 2001: The Scientific Basis. Contribution of Working Group I to the Third Assessment Report of the Intergovernmental Panel on Climate Change; Houghton, J.T., Ding, Y., Griggs, D.J., Noguer, M., Linden, P.J.v., Dai, X., Maskell, K., Johnson, C.A., Eds.; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2001. [Google Scholar]
- Hasselmann, K. Optimal fingerprints for the detection of time-dependent climate change. J. Clim. 1993, 6, 1957–1971. [Google Scholar] [CrossRef]
- Stott, A.; Allen, M.R.; Jones, G.S. Estimating signal amplitudes in optimal fingerprinting. part II: Application to general circulation models. Clim. Dyn. 2003, 21, 493–500. [Google Scholar] [CrossRef]
- Zhang, X.; Zwiers, F.W.; Hegerl, G.C.; Lambert, F.H.; Gillett, N.P.; Solomon, S.; Stott, P.A.; Nozawa, T. Detection of human influence on twentieth-century precipitation trends. Nature 2007, 448, 461–465. [Google Scholar] [CrossRef]
- Allen, M.R.; Stott, P.A. Estimating signal amplitudes in optimal fingerprinting, part I: Theory. Clim. Dyn. 2003, 21, 477–491. [Google Scholar] [CrossRef]
- Gillett, N.; Stone, D.; Stott, P.; Nozawa, T.; Karpechko, A.; Hegerl, G.; Wehner, M.; Jones, P. Attribution of polar warming to human influence. Nat. Geosci. 2008, 1, 750–754. [Google Scholar] [CrossRef]
- Hegerl, G.C.; Crowley, T.J.; Allen, M.; Hyde, W.T.; Pollack, H.N.; Smerdon, J.; Zorita, E. Detection of human influence on a new, validated 1500-year temperature reconstruction. J. Clim. 2007, 20, 650–666. [Google Scholar] [CrossRef]
- Hegerl, G.; Luterbacher, J.; González-Rouco, F.; Tett, S.F.B.; Crowley, T.; Xoplaki, E. Influence of human and natural forcing on european seasonal temperatures. Nat. Geosci. 2011, 4, 99–103. [Google Scholar] [CrossRef]
- Lambert, F.; Stott, P.; Allen, M.; Palmer, M. Detection and attribution of changes in 20th century land precipitation. Geophys. Res. Lett. 2004, 31, L10203. [Google Scholar] [CrossRef]
- Stott, P.A.; Sutton, R.T.; Smith, D.M. Detection and attribution of atlantic salinity changes. Geophys. Res. Lett. 2008, 35, L21702. [Google Scholar] [CrossRef]
- Zwiers, F.; Zhang, X. Toward regional-scale climate change detection. J. Clim. 2003, 16, 793–797. [Google Scholar] [CrossRef]
- Cummins, D.P.; Stephenson, D.B.; Stott, P.A. Could detection and attribution of climate change trends be spurious regression? Clim. Dyn. 2022, 59, 2785–2799. [Google Scholar] [CrossRef]
- Hannart, A. Integrated optimal fingerprinting: Method description and illustration. J. Clim. 2016, 29, 1977–1998. [Google Scholar] [CrossRef]
- Eyring, V.; Gillett, N.P.; Achuta Rao, K.M.; Barimalala, R.; Barreiro Parrillo, M.; Bellouin, N.; Cassou, C.; Durack, P.J.; Kosaka, Y.; McGregor, S.; et al. Human Influence on the Climate System. In Climate Change 2021: The Physical Science Basis. Contribution of Working Group I to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change; Masson-Delmotte, V., Zhai, P., Pirani, A., Connors, S.L., Péan, C., Berger, S., Caud, N., Chen, Y., Goldfarb, L., Gomis, M.I., et al., Eds.; Cambridge University Press: Cambridge, UK, 2021; pp. 423–552. [Google Scholar]
- Phillips, P.C.B. Understanding spurious regressions in econometrics. J. Econom. 1986, 33, 311–340. [Google Scholar] [CrossRef]
- Granger, C.W.J.; Newbold, P. Spurious regressions in econometrics. J. Econom. 1974, 2, 111–120. [Google Scholar] [CrossRef]
- Yule, G.U. Why do we sometimes get nonsense-correlations between time-series?—A study in sampling and the nature of time-series. J. R. Stat. Soc. 1926, 89, 1–63. [Google Scholar] [CrossRef]
- Turasie, A. Cointegration Modelling of Climatic Time Series. Ph.D. Thesis, University of Exeter, Exeter, UK, 2012. Available online: https://ethos.bl.uk (accessed on 26 July 2023).
- Juselius, K. The Cointegrated Var Model: Methodology and Applications; Oxford University Press: Oxford, UK, 2006. [Google Scholar]
- Engle, R.F.; Granger, C.W.J. Co-integration and error correction: Representation, estimation and testing. Econometrica 1987, 55, 251–276. [Google Scholar] [CrossRef]
- Hegerl, G.C.; von Storch, H.; Hasselmann, K.; Santer, B.D.; Cubasch, U.; Jones, P.D. Detecting Greenhouse-Gas-Induced Climate Change with an Optimal Fingerprint Method. J. Clim. 1996, 9, 2281–2306. [Google Scholar] [CrossRef]
- Morton-Jones, A.; Henderson, R. Generalized Least Squares with Ignored Errors in Variables. Technometrics 2000, 42, 366–375. [Google Scholar] [CrossRef]
- Van Huffel, S.; Vandewalle, J. The Total Least Squares Problem: Computational Aspects and Analysis; Society for Industrial Mathematics: Philadelphia, PA, USA, 1991. [Google Scholar]
- Golub, G.H.; Van Loan, C.F. Matrix Computations; JHU Press: Baltimore, MA, USA, 2013. [Google Scholar]
- Cox, P.; Huntingford, C.; Williamson, M. Emergent constraint on equilibrium climate sensitivity from global temperature variability. Nature 2018, 553, 319–322. [Google Scholar] [CrossRef] [PubMed]
- Johansen, S. Estimation and hypothesis testing of cointegration vectors in gaussian vector autoregressive models. Econom. J. Econom. Soc. 1991, 59, 1551–1580. [Google Scholar] [CrossRef]
- Cummins, D.P.; Stephenson, D.B.; Stott, P.A. Optimal Estimation of Stochastic Energy Balance Model Parameters. J. Clim. 2020, 33, 7909–7926. [Google Scholar] [CrossRef]
- Beenstock, M.; Reingewertz, Y.; Paldor, N. Polynomial cointegration tests of anthropogenic impact on global warming. Earth Syst. Dyn. 2012, 3, 173–188. [Google Scholar] [CrossRef]
- Estrada, F.; Perron, P. Extracting and analyzing the warming trend in global and hemispheric temperatures. J. Time Ser. Anal. 2017, 38, 711–732. [Google Scholar] [CrossRef]
- Phillips, P.C.; Leirvik, T.; Storelvmo, T. Econometric estimates of earth’s transient climate sensitivity. J. Econom. 2020, 214, 6–32. [Google Scholar] [CrossRef]
- Pretis, F. Econometric modelling of climate systems: The equivalence of energy balance models and cointegrated vector autoregressions. J. Econom. 2020, 214, 256–273. [Google Scholar] [CrossRef]
- Stern, D.I.; Kaufmann, R.K. Anthropogenic and natural causes of climate change. Clim. Chang. 2014, 122, 257–269. [Google Scholar] [CrossRef]
- Granger, C. Some properties of time series data and their use in econometric model specification. J. Econom. 1981, 16, 121–130. [Google Scholar] [CrossRef]
- Johansen, S. Statistical analysis of cointegration vectors. J. Econ. Dyn. Control 1988, 12, 231–254. [Google Scholar] [CrossRef]
- Osterwald-Lenum, M. A note with quantiles of the asymptotic distribution of the maximum likelihood cointegration rank test statistics. Oxf. Bull. Econ. Stat. 1992, 54, 461–472. [Google Scholar] [CrossRef]
- Beenstock, M.; Reingewertz, Y.; Paldor, N. Testing the historic tracking of climate models. Int. J. Forecast. 2016, 32, 1234–1246. [Google Scholar] [CrossRef]
- Johansen, S. Likelihood-Based Inference in Cointegrated Vector Autoregressive Models; Oxford University Press: Oxford, UK, 1995. [Google Scholar]
- Dickey, D.A.; Fuller, W.A. Distribution of the estimators for autoregressive time series with a unit root. J. Am. Stat. Assoc. 1979, 74, 427–431. [Google Scholar]
- Dickey, D.A.; Fuller, W.A. Likelihood ratio statistics for autoregressive time series with a unit root. Econometrica 1981, 49, 1057–1072. [Google Scholar] [CrossRef]
- Rust, B.W.; Thijsse, B.J. Data-based models for global temperature variations. In Proceedings of the 2007 International Conference on Scientific Computing, Sozopol, Bulgaria, 5–9 June 2007; CSREA Press: Las Vegas, NV, USA, 2007; pp. 10–16. [Google Scholar]
- Rust, B.W. A mathematical model of atmospheric retention of man-made CO2 emissions. Math. Comput. Simul. 2011, 81, 2326–2336. [Google Scholar] [CrossRef]
- Harvey, D.I.; Mills, T.C. Modelling global temperature trends using cointegration and smooth transitions. Stat. Model. 2001, 1, 143–159. [Google Scholar] [CrossRef]
- Kaufmann, R.K.; Stern, D.I. Cointegration analysis of hemispheric temperature relations. J. Geophys. Res. 2002, 107, 4012. [Google Scholar] [CrossRef]
- Kaufmann, R.K.; Kauppi, H.; Stock, J.H. The relationship between radiative forcing and temperature: What do statistical analyses of the instrumental temperature record measure? Clim. Chang. 2006, 77, 279–289. [Google Scholar] [CrossRef]
- Liu, H.; Rodríguez, G. Human activities and global warming: A cointegration analysis. Environ. Model. Softw. 2005, 20, 761–773. [Google Scholar] [CrossRef]
- Stern, D.I.; Kaufmann, R.K. Econometric analysis of global climate change. Environ. Model. Softw. 1999, 14, 597–605. [Google Scholar] [CrossRef]
- Stern, D.I.; Kaufmann, R.K. Detecting a global warming signal in hemispheric temperature series: A structural time series analysis. Clim. Chang. 2000, 47, 411–438. [Google Scholar] [CrossRef]
- Meinshausen, M.; Vogel, E.; Nauels, A.; Lorbacher, K.; Meinshausen, N.; Etheridge, D.M.; Fraser, P.J.; Montzka, S.A.; Rayner, P.J.; Trudinger, C.M.; et al. Historical greenhouse gas concentrations for climate modelling (CMIP6). Geosci. Model. Dev. 2017, 10, 2057–2116. [Google Scholar] [CrossRef]
- Caldeira, K.; Myhrvold, N.P. Projections of the pace of warming following an abrupt increase in atmospheric carbon dioxide concentration. Environ. Res. Lett. 2013, 8, 034039. [Google Scholar] [CrossRef]
- Fredriksen, H.B.; Rypdal, M. Long-range persistence in global surface temperatures explained by linear multibox energy balance models. J. Clim. 2017, 30, 7157–7168. [Google Scholar] [CrossRef]
- Tsutsui, J. Quantification of temperature response to CO2 forcing in atmosphere–ocean general circulation models. Clim. Chang. 2017, 140, 287–305. [Google Scholar] [CrossRef]
- Pfaff, B. Analysis of Integrated and Cointegrated Time Series with R, 2nd ed.; Springer: New York, NY, USA, 2008; ISBN 0-387-27960-1. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Institution | Simulations | |
|---|---|---|---|
| 1 | bcc-csm1-1 | Beijing Climate Center, China Meteorological Administration | 3 |
| 2 | CanESM2 | Canadian Centre for Climate Modeling and Analysis | 5 |
| 3 | CCSM4 | NCAR Community Climate System Model | 6 |
| 4 | CNRM-CM5 | Centre National de Recherches Meteorologiques/Centre Europeen de Recherche et Formation Avancees en Calcul Scientifique | 10 |
| 5 | CSIRO-Mk3-6-0 | Commonwealth Scientific and Industrial Research Organisation and the Queensland Climate Change Centre of Excellence | 10 |
| 6 | EC-Earth23 | European Centre for Medium-Range Weather Forecasts | 1 |
| 7 | GISS-E2-R | NASA Goddard Institute for Space Studies | 10 |
| 8 | GISS-E2-H | NASA Goddard Institute for Space Studies | 5 |
| 9 | HadCM3 | Met Office Hadley Centre | 1 |
| 10 | HadGEM2-CC | Met Office Hadley Centre | 1 |
| 11 | HadGEM2-ES | Met Office Hadley Centre | 4 |
| 12 | inmcm4 | Institute for Numerical Mathematics, Moscow, Russia | 1 |
| 13 | IPSL-CM5A-LR | Institut Pierre Simon Laplace, Paris, France | 4 |
| 14 | MIROC5 | Atmosphere and Ocean Research Institute (The University of Tokyo) | 1 |
| 15 | MRI-CGCM3 | Meteorological Research Institute, Tsukuba, Japan | 5 |
| 16 | NorESM1-M | Norwegian Climate Centre | 3 |
| Simulation | Null Hypothesis | |
|---|---|---|
| : | ||
| 1.67 | 33.35 | |
| 1.77 | 34.49 | |
| 2.01 | 36.82 | |
| 2.55 | 29.47 | |
| 3.50 | 25.70 | |
| 1.91 | 28.35 | |
| 1.66 | 28.63 | |
| 2.17 | 25.78 | |
| 1.79 | 30.68 | |
| 3.60 | 29.17 | |
| 3.96 | 28.23 | |
| 2.10 | 50.32 | |
| 1.64 | 32.46 | |
| 3.40 | 54.99 | |
| 2.20 | 36.40 | |
| 2.17 | 43.72 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stephenson, D.B.; Turasie, A.A.; Cummins, D.P. More Accurate Climate Trend Attribution by Using Cointegrating Vector Time Series Models. Sustainability 2023, 15, 12142. https://doi.org/10.3390/su151612142
Stephenson DB, Turasie AA, Cummins DP. More Accurate Climate Trend Attribution by Using Cointegrating Vector Time Series Models. Sustainability. 2023; 15(16):12142. https://doi.org/10.3390/su151612142
Chicago/Turabian StyleStephenson, David B., Alemtsehai A. Turasie, and Donald P. Cummins. 2023. "More Accurate Climate Trend Attribution by Using Cointegrating Vector Time Series Models" Sustainability 15, no. 16: 12142. https://doi.org/10.3390/su151612142
APA StyleStephenson, D. B., Turasie, A. A., & Cummins, D. P. (2023). More Accurate Climate Trend Attribution by Using Cointegrating Vector Time Series Models. Sustainability, 15(16), 12142. https://doi.org/10.3390/su151612142