
Dynamic Reconfiguration to Optimize Energy Production on Moving Photovoltaic Panels

 , , , and
, , , and
Abstract
:1. Introduction
2. Genesis
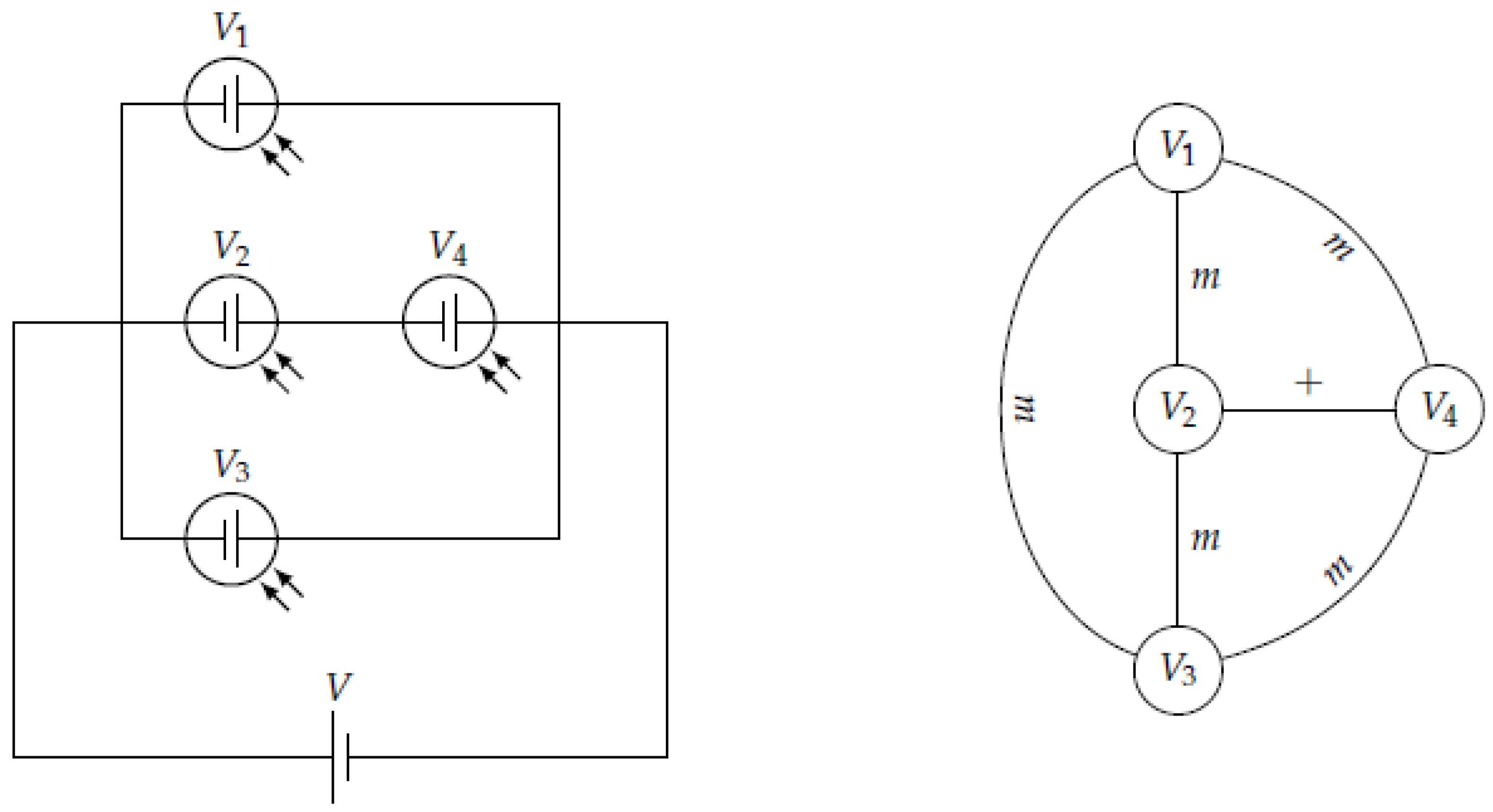
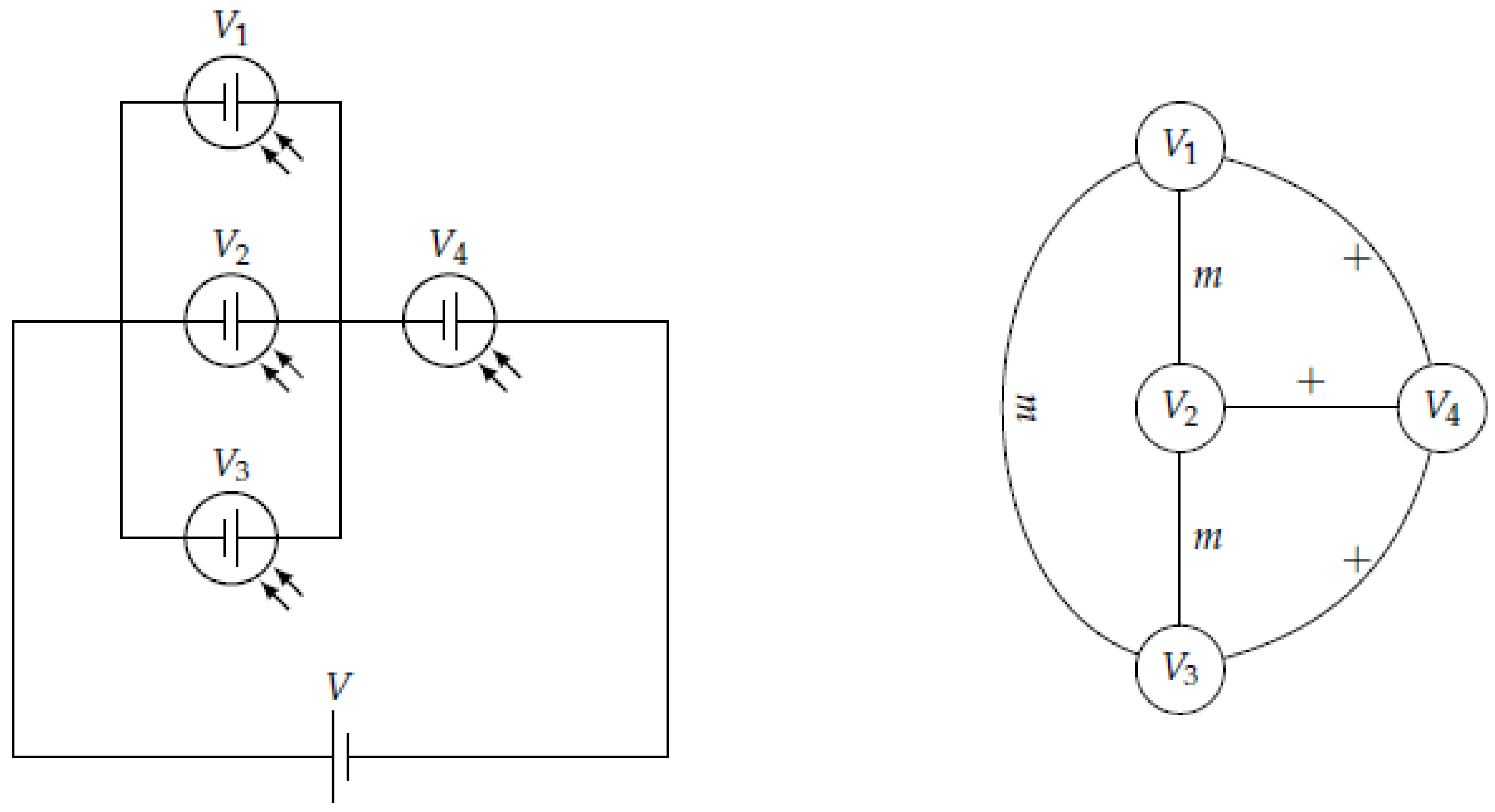
3. Dijkstra Algorithm and Electrical Conversion
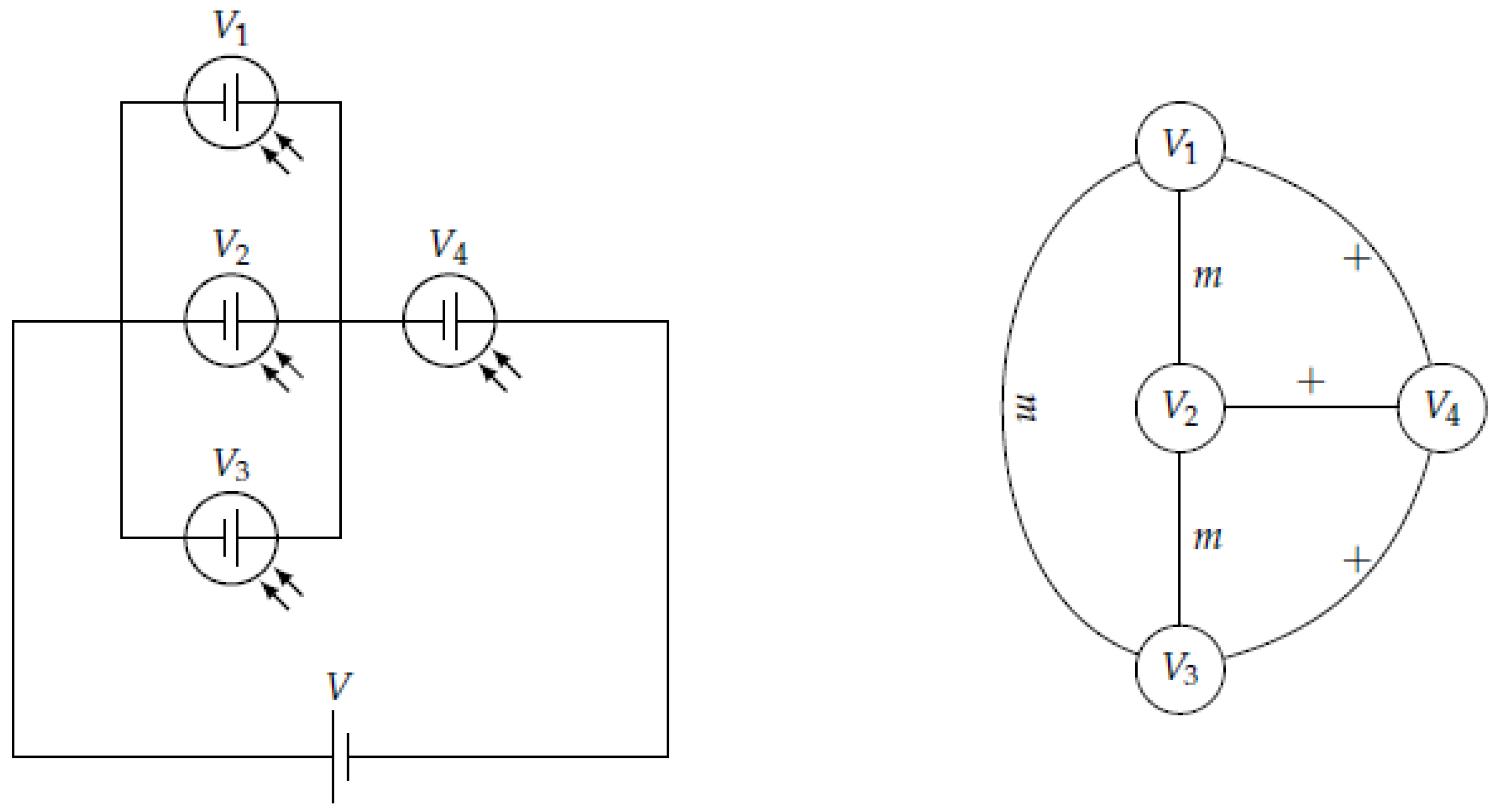
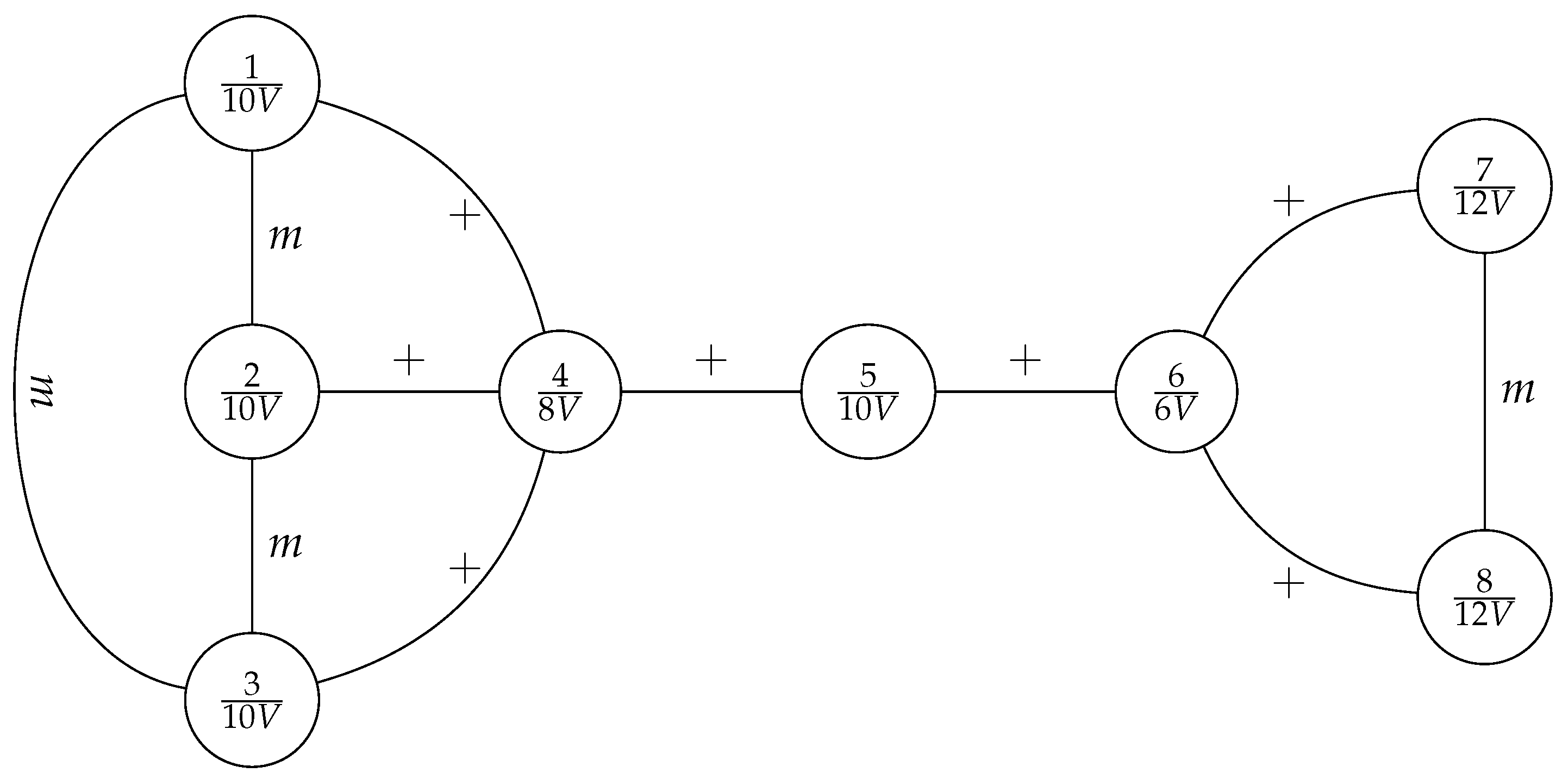
- Electrical Dijkstra Algorithm
- 1.
- It shall start from the first vertex and reach the last vertex by passing through all of them.
- 2.
- The column of the chosen vertex shall be cancelled and the operations indicated on each edge shall be calculated with the values of the combined vertices.
- 3.
- If “+” is found, the values are added together and both are marked with a superscript sum together with the value of the vertex.
- 4.
- If “m” is found, the minimum of the values is calculated and both are marked with a subscript m accompanied by the calculated minimum.
- 5.
- In each step, the minimum of the row results is searched to choose that vertex as the new starting point, circling the chosen value and using that value to sum it in the next step.
- 6.
- If, when using a vertex, it has a superscript or a subscript, the value that accompanies it must be subtracted in the calculations (if it is a sum, the value of the superscript is removed, and if it is a minimum, the value of the subscript is removed).
- 7.
- If two vertices are not related, the value they had is left, and if they had no value, it is set to infinity.
- 8.
- In each step, if the value in the previous row is less than the one currently calculated, the lesser value is left.
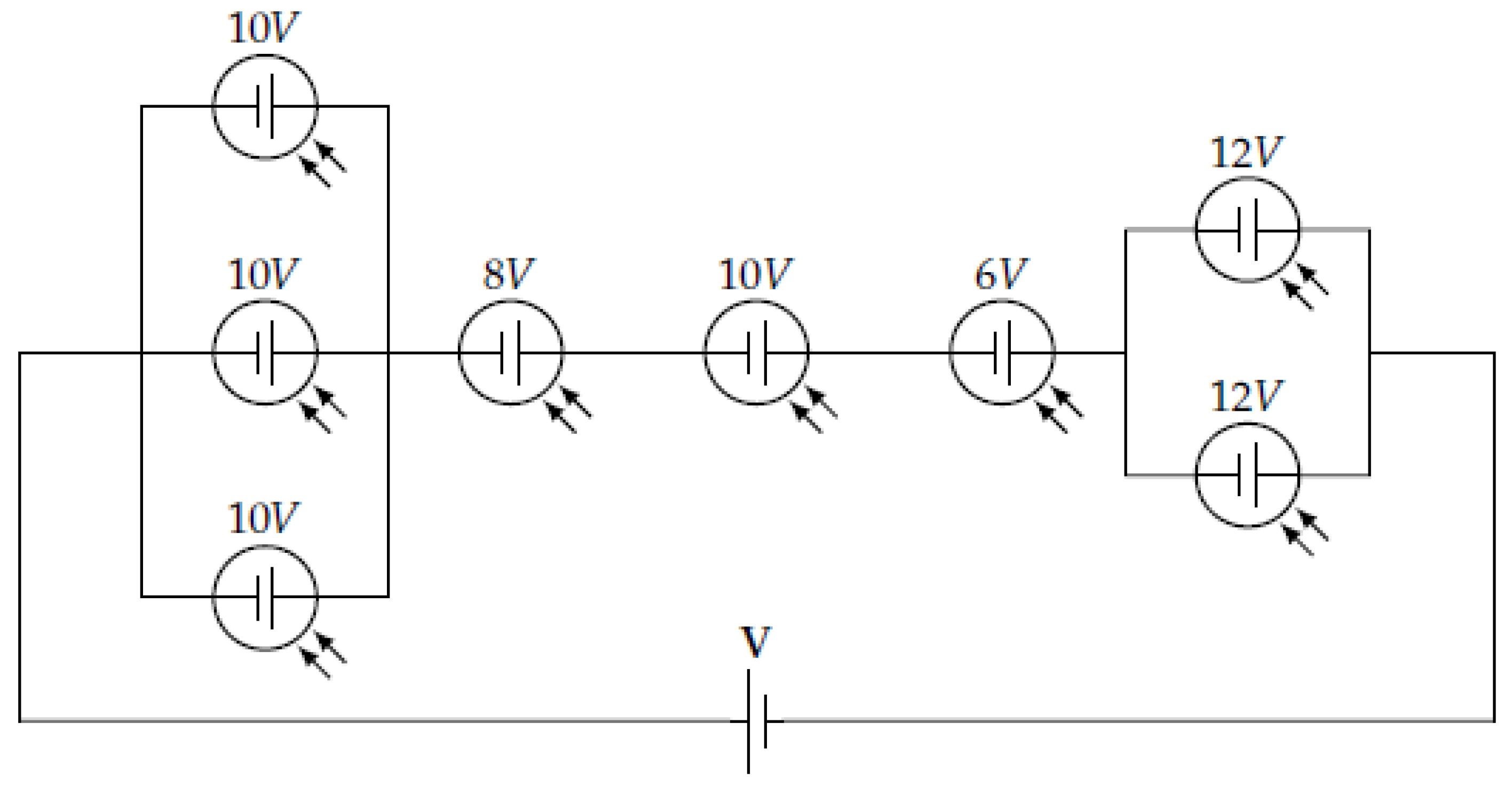
- Matrix application of algorithm
![Sustainability 15 10858 i001]()
- Computational resolution


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
- −1 is a parallel connection (minimum);
- 0 is a serial connection (sum);
- 1 is no relation edge.
- 1.
- Sorting (in increasing order of types of connections exposed in the matrix A):col=zeros(1,size(A,1));for i=1:size(A,1)for j=i+1:size(A,1)-1for k=j+1:size(A,1)if A(i,j)>A(i,k) && col(j)==0pivot=A(j,:);A(j,:)=A(k,:); A(k,:)=pivot;pivot=A(:,j);A(:,j)=A(:,k); A(:,k)=pivot;col(j)=1;if j==size(A,1)-1col(k)=1;endendendendendobtaining, in this case, the same matrix A as above.
- 2.
- Weights:A temporary weight matrix is created where
- the weights are negative if it is a parallel join;
- the weights are positive if it is a series connection;
B=[];for i=1:size(A,1)for j=i+1:size(A,1)if A(i,j)==-1B(i,j)=-A(i,i);elseif A(i,j)==0B(i,j)=A(j,j);elseB(i,j)=0;endendendobtaining - 3.
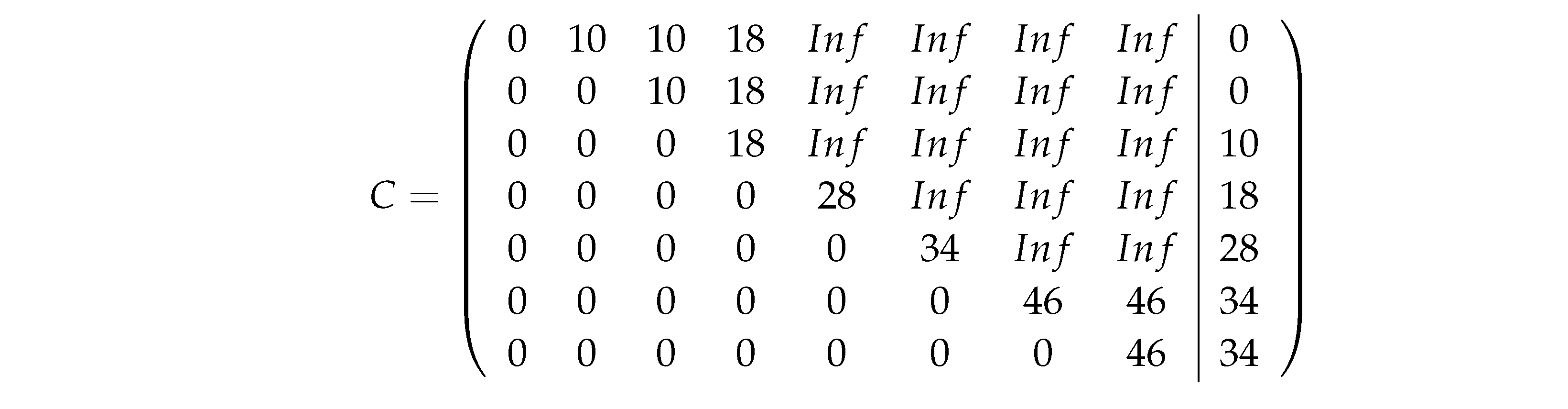
- Electrical Dijkstra (with the accumulated increment at the last column):increment=0;C=[]; C(1,size(A,1)+1)=0;for i=1:size(A,1)if i>1 && B(i-1,i)>0increment=C(i-1,i)-A(i,i)endif i>1increment=max(increment,C(i-1,size(A,1)+1));C(i-1,size(A,1)+1)=increment;endfor j=i+1:size(A,1)if B(i,j)<0C(i,j)=increment+min(-B(i,j),A(i,i));elseif B(i,j)>0C(i,j)=increment+A(i,i)+B(i,j);elseif i>1if C(i-1,j)>0C(i,j)=C(i-1,j);elseC(i,j)=inf;endelseC(i,j)=inf;endendendendleaving
4. Dynamic Reconfiguration
Maximum Efficiency Topology
5. Electronic Solutions
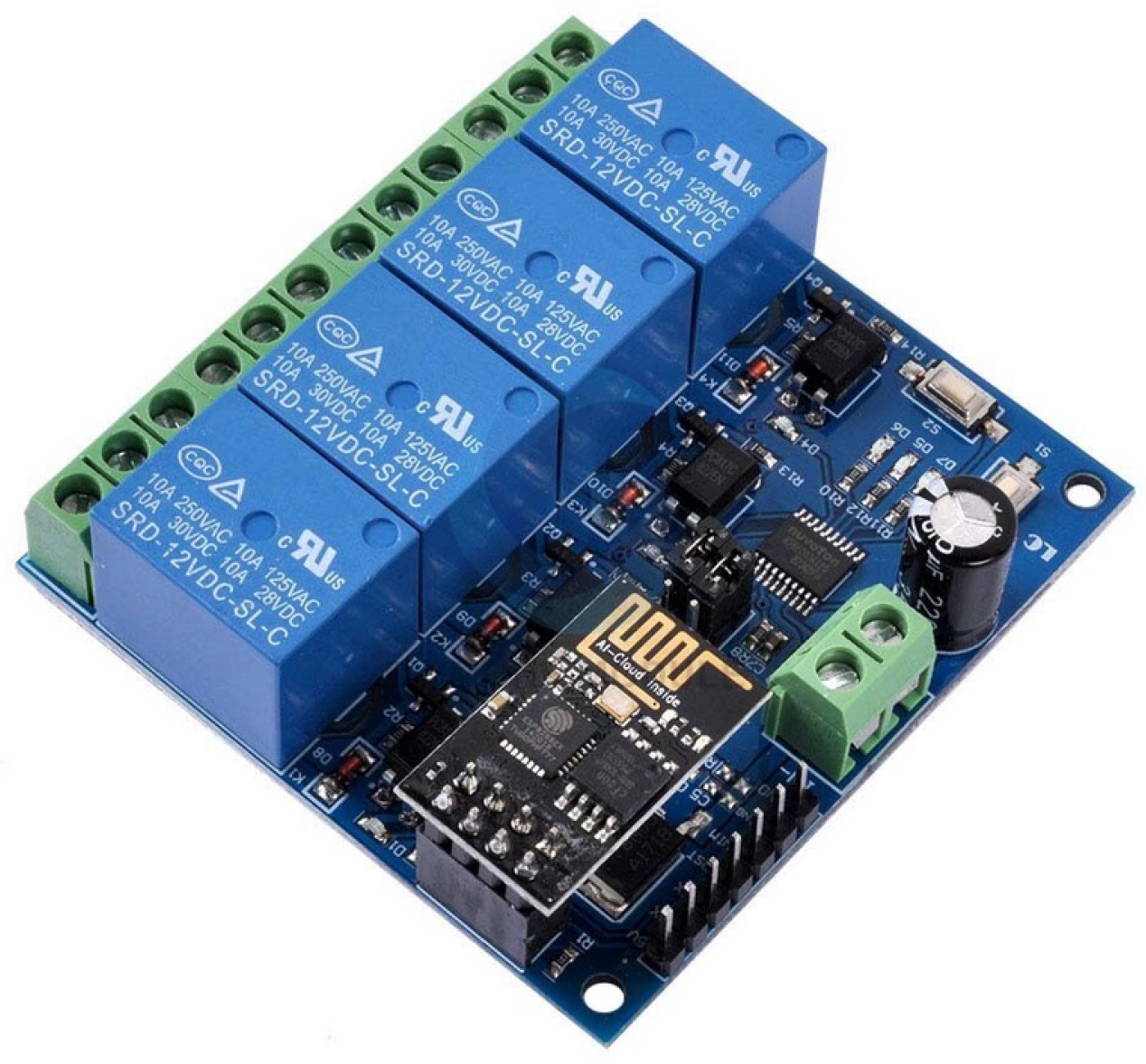
- 1.
- Low-cost model: development based on the Esp8266 chip with four relays. These devices will accompany each of the panels and will allow independent solutions, depending on their configuration, of maximum voltage and maximum amperage.
- 2.
- Minimum model: simplification of the previous model based on the voltage drop on a relay. It offers constant voltage and is especially recommended for linear configurations (buses, trams, motorhomes, etc.).
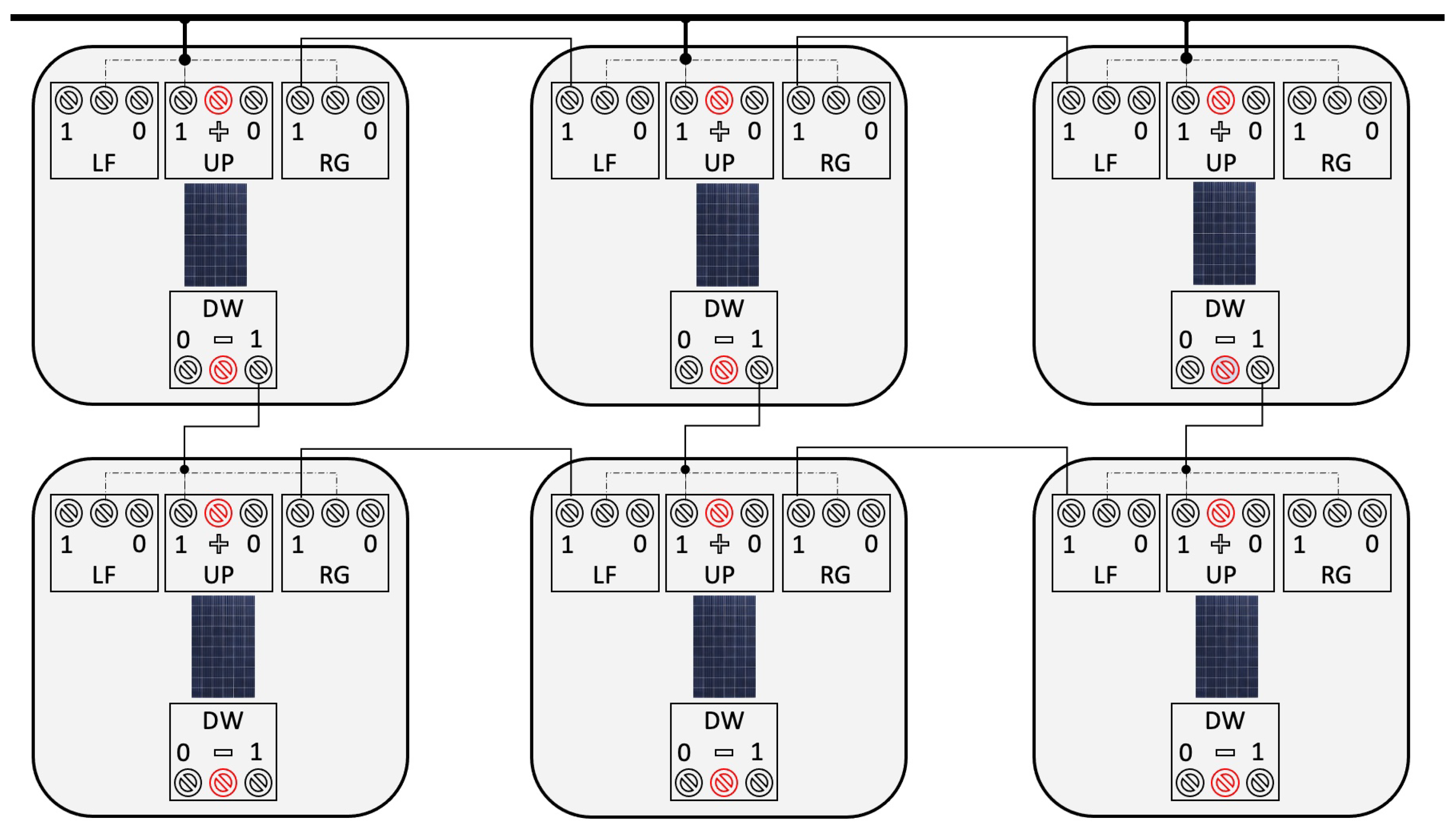
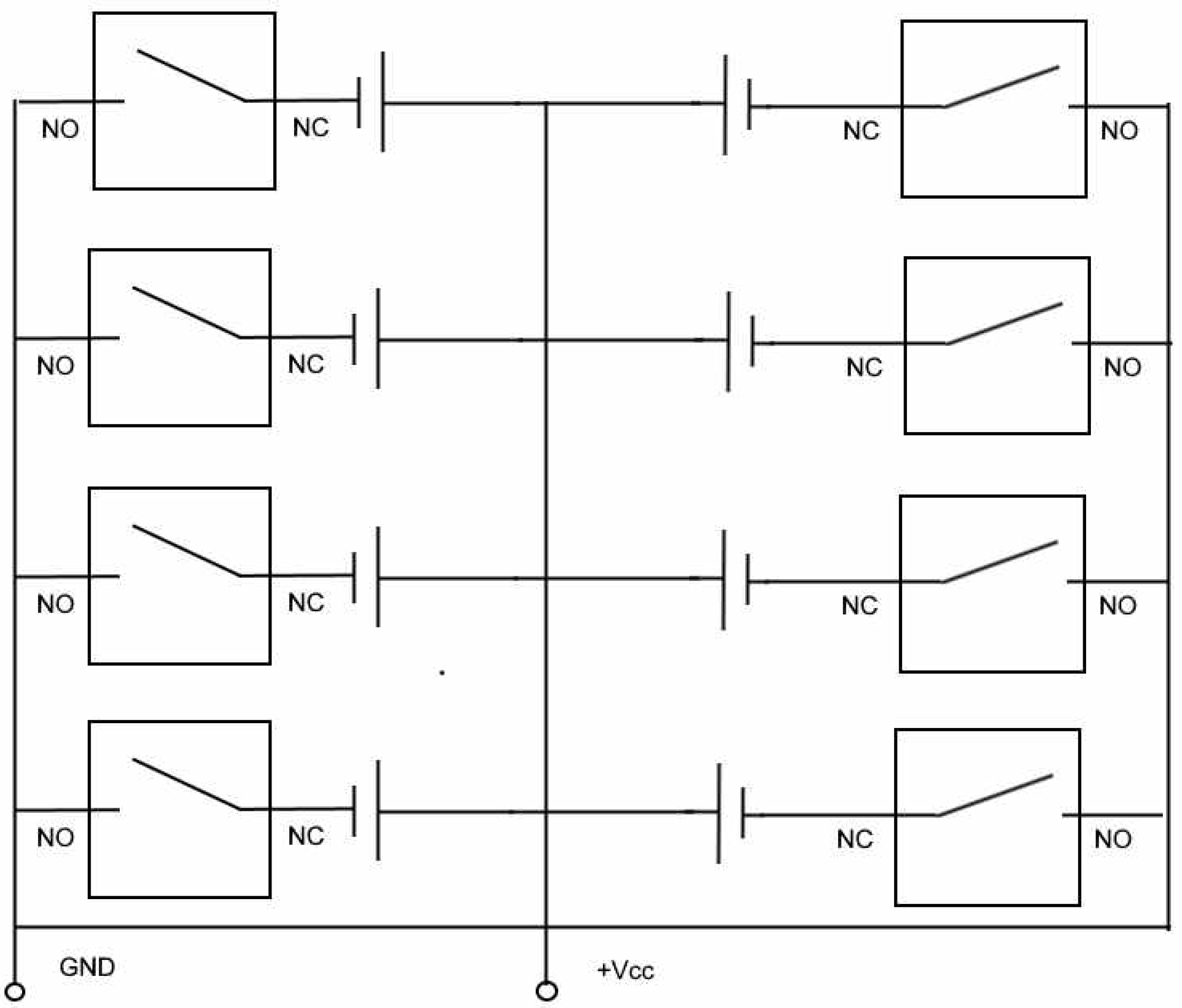
5.1. Low-Cost Model
5.1.1. Tree Root Algorithm
5.1.2. Electronic Development
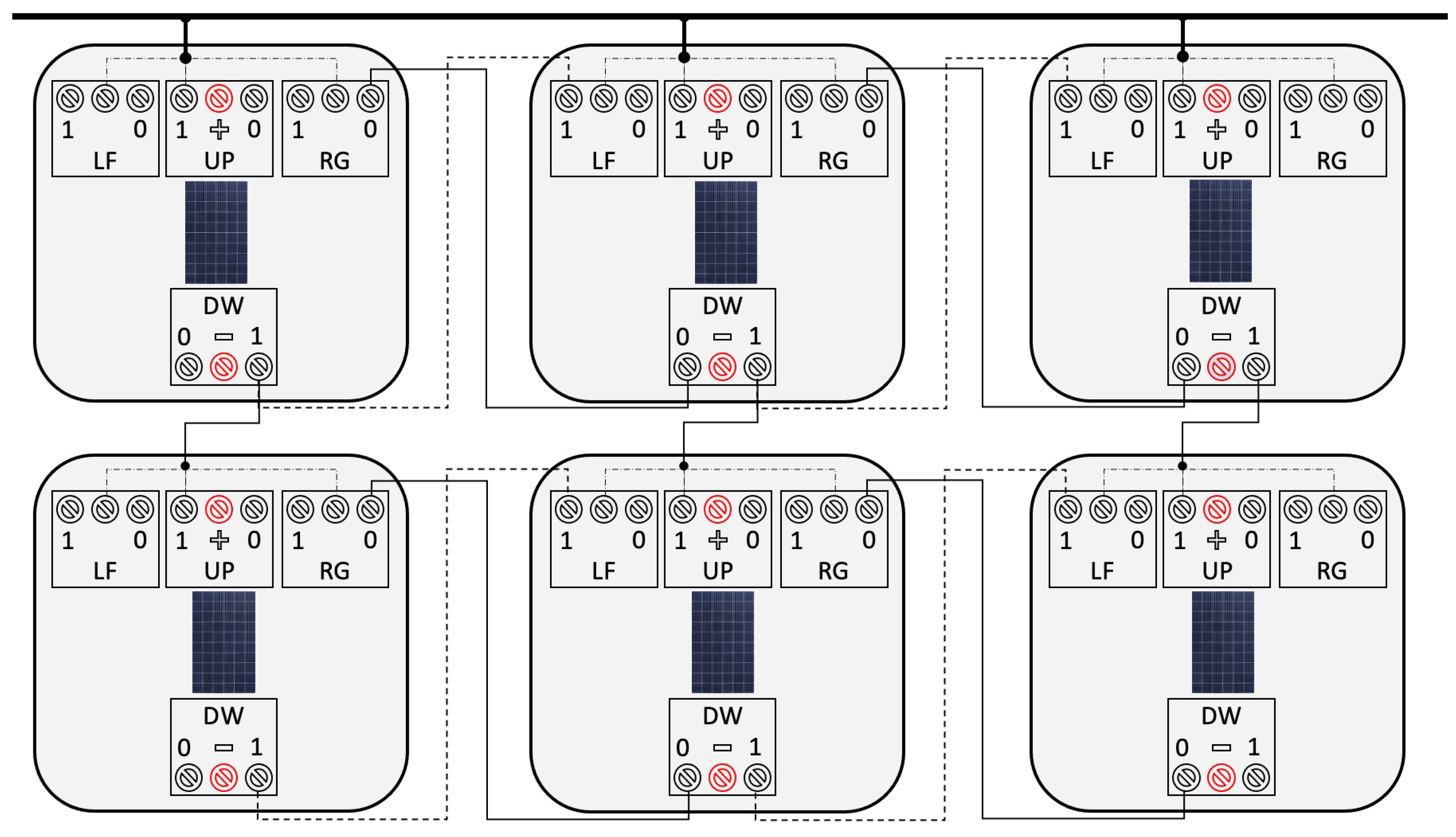
5.2. Minimum Model
- By working directly using the energy generated by the different panels as a source of energy for the activation of the switching relay, its operation is independent of any external system (either control or power supply) so that any environmental alteration or decrease in the supply of solar energy that affects the panel will lead to the switching of the relay.
- The need for wiring is simplified to the maximum to control the switching and achieve the change of connection of the panels, going from series to parallel connection and vice versa when established by the conditions of energy production of the same at an individual level.
- The system has been initially designed as a supplementary contribution to an energy supply system powered by batteries but, given that its application ensures the stability of the voltage supplied by the set of panels, it could be used as a primary energy system (provided that the number of panels installed supplies sufficient current to power the loads to be connected) and, if so desired, the surplus generated could be used to charge them during periods of inactivity (as in the case of flexible panels of Multijunction-MJ and Silicon-Si types studied by Masafumi Yamaguchi’s team [4]).
- As it is a decentralised control system and autonomous operation, it does not require the intervention of microcontrollers and energy measurement systems that record the intensity supplied by each of the panels to establish the way in which it will be connected to the set.
6. Conclusions and Future Work
- Complexity: From the point of view of computational complexity, for the application of control algorithms based on software logic, using a microcontroller with its appropriate programming to send orders to the sp8266, this, in turn, organizes the serial or parallel connection of the adjacent panels, and it is more appropriate to program it on the so-called “low-cost” model using MATLAB [15].
- Non-linear distribution: In panels with non-linear or non-geometric distribution (for example, in solar farms), management must be carried out by means of low-cost models using linear programming techniques. For this purpose, an objective function (Adjacency Matrix) will be established and the possible solutions will be evaluated through the electric Dijkstra algorithm presented in this work.
- Minimum model: Considering the simplicity of the installation, for systems that interact automatically by potential drop, the minimum model optimizes the cost of the total installation and the number of devices and, therefore, reduces the complexity of the system. The relays responsible for establishing the electrical connection mode will be located on the panels themselves.
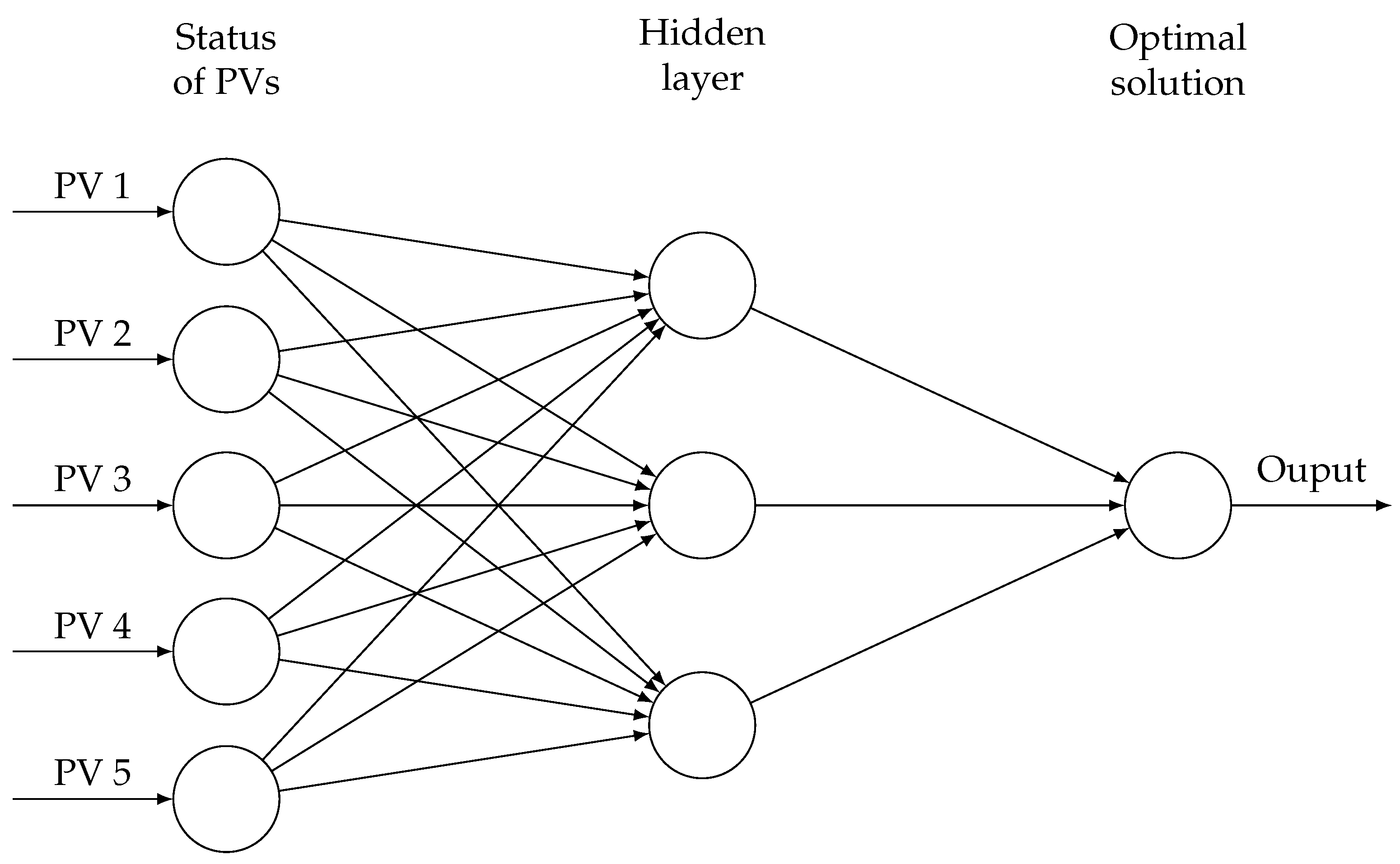
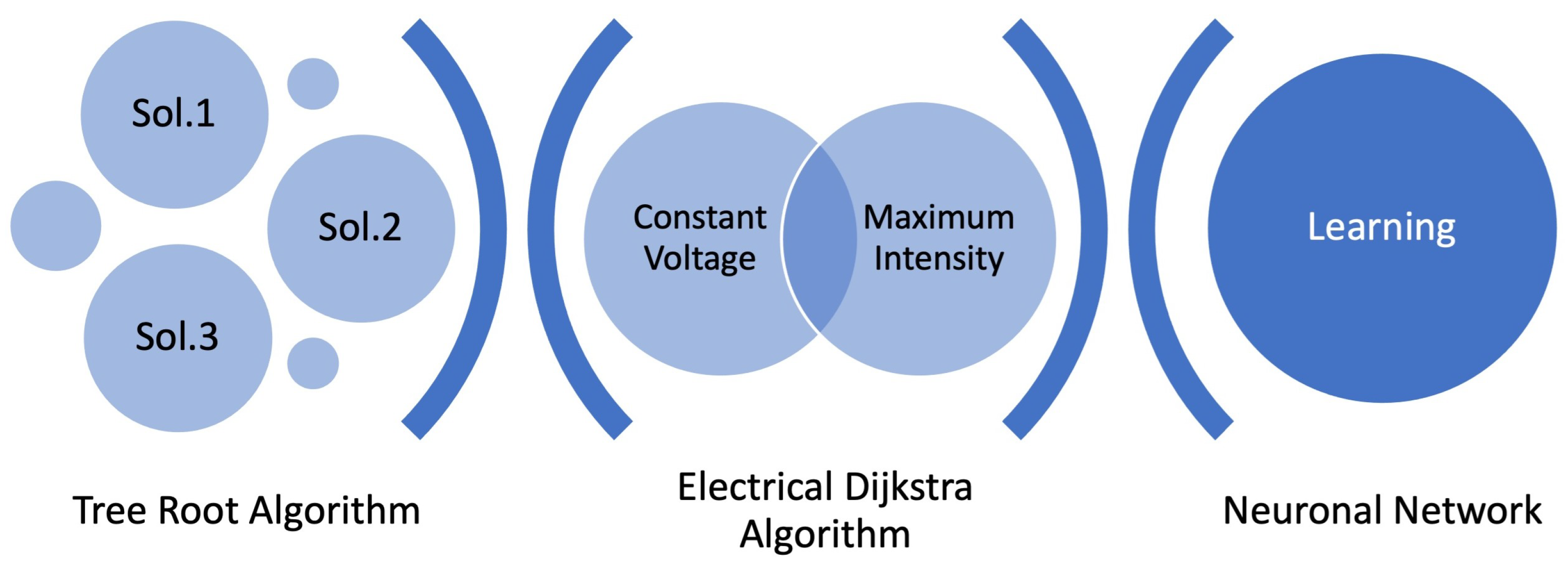
- Artificial intelligence: As an application of artificial intelligence, when establishing the mechanism for solving this problem, the result is optimized by searching the solution space using the tree root algorithm. Finally, after finding the most efficient solution, the underlying neural network will be reprogrammed, providing new knowledge and learning to the system (Figure 17).
- 1.
- Non-linear distribution (Figure 18): Applied to boats and cars.Given the complexity of their possible PV surfaces, flexible panels would be used and solved by the low-cost model.
- 2.
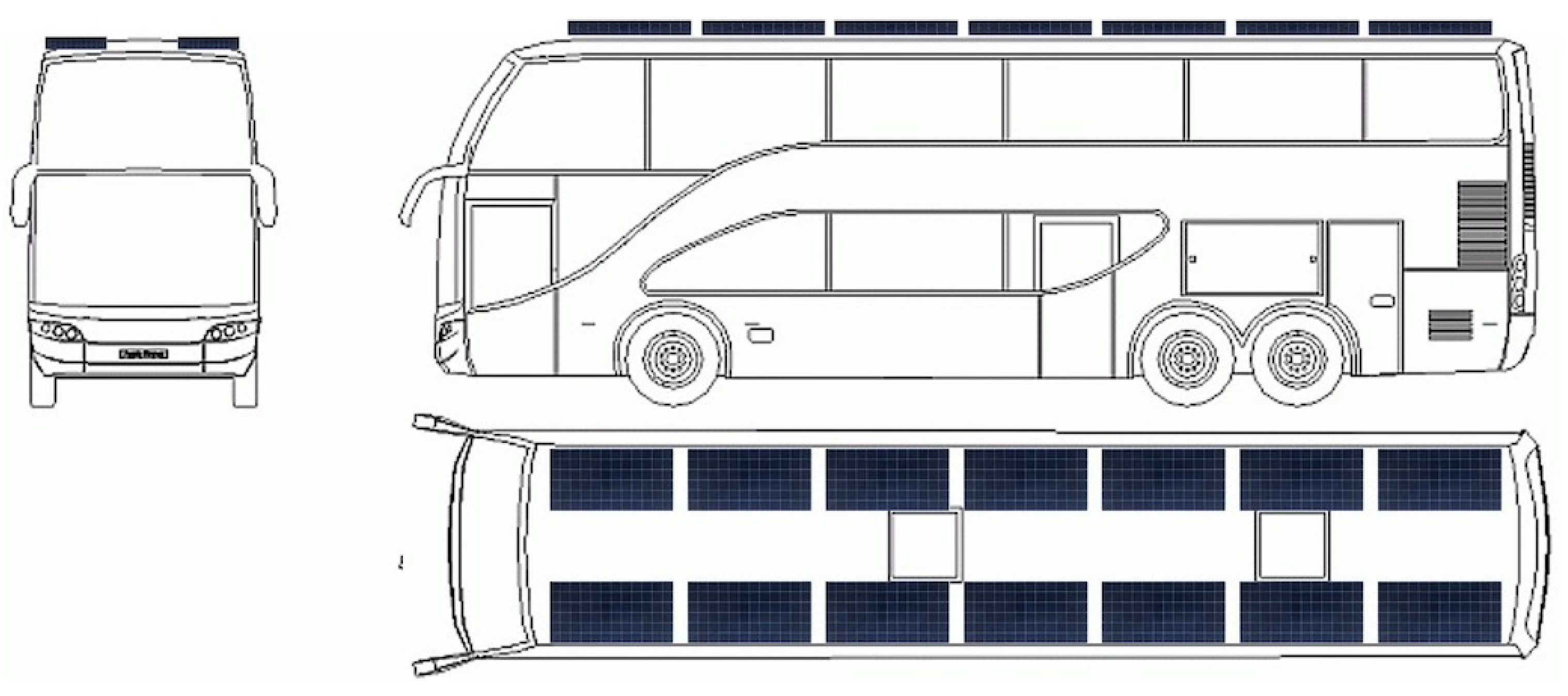
- Linear distribution (Figure 19): Applied to buses and trams.Due to their rectangular and elongated roofs, they offer a suitable layout for linear configurations, being solvable under the minimum model.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Muttana, S.; Dey, R.; Sardar, A. Prospects of Electric Bus Integrated with Solar Photovoltaic Cells; SAE Technical Paper; SAE: Warrendale, PA, USA, 2017. [Google Scholar] [CrossRef]
- Myeongchan, O.; Sung-Min, K.; Hyeong-Dong, P. Estimation of photovoltaic potential of solar bus in an urban area: Case study in Gwanak, Seoul, Korea. Renew. Energy 2020, 160, 1335–1348. [Google Scholar]
- Nassiri Nazif, K.; Daus, A.; Hong, J.; Lee, N.; Vaziri, S.; Kumar, A.; Nitta, F.; Chen, M.E.; Kananian, S.; Islam, R.; et al. High-specific-power flexible transition metal dichalcogenide solar cells. Nat. Commun. 2021, 12, 7034. [Google Scholar] [CrossRef] [PubMed]
- Yamaguchi, M.; Masuda, T.; Araki, K.; Sato, D.; Lee, K.H.; Kojima, N.; Takamoto, T.; Okumura, K.; Satou, A.; Yamada, K.; et al. Development of high-efficiency and low-cost solar cells for PV-powered vehicles application. Prog. Photovoltaics Res. Appl. 2021, 29, 684–693. [Google Scholar] [CrossRef]
- Wartak, M.S.; Tsakmakidis, K.L.; Hess, O. Introduction to metamaterials. Phys. Can. 2011, 67, 30–34. [Google Scholar]
- Merino, S.; Guzmán, F.; Martínez, J. Metadomotic optimization using genetic algorithms. Appl. Math. Comput. 2015, 267, 170–178. [Google Scholar] [CrossRef]
- Merino, S.; Sánchez, F.J.; Sidrach-de-Cardona, M.; Guzmán, F.; Guzmán, R.; Martínez, J.; Sotorrío, P.J. Optimization of energy distribution in solar panel array configurations by graphs and Minkowski’s paths. Appl. Math. Comput. 2018, 319, 48–58. [Google Scholar] [CrossRef]
- Petrone, G.; Spagnuolo, G.; Zhao, Y.; Lehman, B.; Ramos-Paja, C.A.; Orozco, M.L. Control of Photovoltaic Arrays, Dynamical Reconfiguration for Fighting Mismatched Conditions and Meeting Load Requests. IEEE Ind. Electron. Mag. 2015, 9, 62–76. [Google Scholar]
- Sánchez, F.J.; Sotorrío, P.J.; Heredia, J.R.; Pérez, F.; Sidrach-de-Cardona, M. PLC-Based PV Plants Smart Monitoring System: Field Measurements and Uncertainty Estimation. IEEE Trans. Instrum. Meas. 2014, 63, 2215–2222. [Google Scholar] [CrossRef]
- Dallago, E.; Liberale, A.; Miotti, D.; Venchi, G. Direct MPPT algorithm for PV sources with only voltage measurements. IEEE Trans. Power Electron. 2015, 30, 6742–6750. [Google Scholar] [CrossRef]
- Ustun, T.S.; Ozansoy, C.; Zayegh, A. Implementation of Dijkstra’s algorithm in a dynamic microgrid for relay hierarchy detection. In Proceedings of the 2011 IEEE International Conference on Smart Grid Communications (SmartGridComm 2011), Brussels, Belgium, 17–20 October 2011. [Google Scholar] [CrossRef]
- Mohan, P. Determining the Shortest Current Flow Path Using Dijkstra’s Algorithm in Mess Circuit. Int. J. Innov. Technol. Explor. Eng. 2019, 8, 1635–1638. [Google Scholar]
- Amaresh, K.; Sankar, V. Modeling of Photovoltaic System Interconnected with Radial Distribution System using MATLAB/SIMULINK. Int. J. Eng. Innov. Technol. 2013, 3, 251–257. [Google Scholar]
- Glaser, C. Solar Panel MPPT for Pulsed-load Applications. In Solar Technology; Texas Instruments: Dallas, TX, USA, 2022. [Google Scholar]
- Grama, A.; Dan, M.; Lázár, E. Photovoltaic panel model using Matlab. In Proceedings of the 39th International Spring Seminar on Electronics Technology (ISSE), Pilsen, Czech Republic, 18–22 May 2016; pp. 322–327. [Google Scholar] [CrossRef]
- Möller, M.C.; Krauter, S. Hybrid Energy System Model in Matlab/Simulink Based on Solar Energy, Lithium-Ion Battery and Hydrogen. Energies 2022, 15, 2201. [Google Scholar] [CrossRef]
- Yan, H.W.; Narang, A.; Tafti, H.D.; Farivar, G.G.; Ceballos, S.; Pou, J. Minimizing Energy Storage Utilization in a Stand-Alone DC Microgrid Using Photovoltaic Flexible Power Control. IEEE Trans. Smart Grid 2021, 12, 3755–3764. [Google Scholar] [CrossRef]
- Chacón, J.; Soler, P.R. Electrically rechargeable Aluminum-air batteries to power Smart Cities. In Proceedings of the 2013 International Conference on New Concepts in Smart Cities: Fostering Public and Private Alliances (SmartMILE), Gijon, Spain, 11–13 December 2013; pp. 1–4. [Google Scholar] [CrossRef]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Merino, S.; Martinez, J.; Guzman, F.; Lara, J.d.D.; Guzman, R.; Sanchez, F.; Heredia, J.R.; Sidrach de Cardona, M. Dynamic Reconfiguration to Optimize Energy Production on Moving Photovoltaic Panels. Sustainability 2023, 15, 10858. https://doi.org/10.3390/su151410858
Merino S, Martinez J, Guzman F, Lara JdD, Guzman R, Sanchez F, Heredia JR, Sidrach de Cardona M. Dynamic Reconfiguration to Optimize Energy Production on Moving Photovoltaic Panels. Sustainability. 2023; 15(14):10858. https://doi.org/10.3390/su151410858
Chicago/Turabian StyleMerino, Salvador, Javier Martinez, Francisco Guzman, Juan de Dios Lara, Rafael Guzman, Francisco Sanchez, Juan Ramon Heredia, and Mariano Sidrach de Cardona. 2023. "Dynamic Reconfiguration to Optimize Energy Production on Moving Photovoltaic Panels" Sustainability 15, no. 14: 10858. https://doi.org/10.3390/su151410858
APA StyleMerino, S., Martinez, J., Guzman, F., Lara, J. d. D., Guzman, R., Sanchez, F., Heredia, J. R., & Sidrach de Cardona, M. (2023). Dynamic Reconfiguration to Optimize Energy Production on Moving Photovoltaic Panels. Sustainability, 15(14), 10858. https://doi.org/10.3390/su151410858