1. Introduction
This study was partly motivated by the emergency relief problem caused by the coronavirus disease 2019 (COVID-19). At the end of 2019, pneumonia of an unknown origin was detected and was contagious. Afterward, it showed an outbreak situation and rapidly expanded its contagious range, and a global epidemic occurred. Various countries have been trying to end the outbreak for over two years, but with little success. As of September 2022, more than 6 million people worldwide have died from COVID-19, and more than 600 million people have been diagnosed with the coronavirus. Most regions exhibited varying degrees of inadequate emergency medical services. To prevent the further spread of the outbreak, traffic control was implemented in many of the heavily infected areas. The lack of medical services in these areas is further exacerbated by the severe decline in the efficiency of the logistics centers. Due to this, ERRP is receiving more and more attention.
The emergency relief problem has been thoroughly studied by many academics, extending to the construction of relief models and relief route selections. To ensure the effectiveness of relief operations, indicators, such as equity, efficiency, and efficacy, need to be factored into emergency relief models [
1]. Taking into account dual-target, multi-modal, and multi-commodity situations and road reliability in times of reduced capacity can help improve the efficiency of casualty transport in disaster areas [
2]. At the same time, the location of the warehouse has some influence on vehicle routes. A suitable warehouse location can speed up the efficiency of rescue vehicles to a certain extent [
3]. In the specific context of emergencies, the time sensitivity of the post-disaster routing problem can be high [
4]. By dispatching assessment vehicles, establishing an assessment and response system [
5], and validating the needs identified by social media [
6], rescue needs can be predicted more accurately. The emergency repair of the damaged road network after a disaster [
7] is highly important in the implementation of relief operations. Mobile Internet networks can be applied to disaster relief scenarios to ensure communication between rescuers and casualties, and to achieve improved connectivity in small-scale disaster areas [
8]. The emergency relief problem has been examined from many perspectives by the academics described above, and several feasible optimization strategies for emergency relief have been proposed. There are only some optimizations that have been made to models, which have not made the solutions for the ERRP faster or more accurate. Furthermore, the relief distribution problem in emergencies has received little attention.
ERRP is a complex optimization problem that arises in emergency management scenarios, such as natural disasters or humanitarian crises. The objective of ERRP is to minimize rescue time, maximize the number of people whose probability of survival exceeds a marginal level, or minimize loss of life and human suffering under various constraints, such as capacity constraints and time windows [
9,
10,
11]. Post-disaster emergency relief and material distribution can be viewed as a specific type of vehicle routing problem (VRP) with time windows, which has garnered considerable attention in the field of path selection. VRP with time windows plays a crucial role in various aspects of our daily lives, ranging from small delivery arrangements for take-away and express delivery to large-scale deployment of materials across different regions.
While traditional VRP models can be adapted for scheduling emergency supplies, such models have significant limitations when it comes to emergency relief and material distribution. In contrast to solving VRPs, where minimizing total cost and time is typically the main objective, solving the ERRP requires more consideration of the degree of suffering of the patients or casualties. Priority must be given to patients in more critical conditions. Consequently, a realistic gap exists between traditional VRP models and ERRP models. To address this issue, we have proposed a model that incorporates the concept of deprivation cost to prioritize support for patients in urgent situations [
12]. The proposed ERRP model considers time windows, vehicle load capacity, and deprivation cost. By using this model, we can more accurately simulate the actual post-disaster material distribution scenario and obtain a more realistic solution that meets the needs of emergency relief operations.
The BSO algorithm, a novel intelligent optimization computing technique, has demonstrated its benefits in handling large-scale, high-dimensional, multi-peak function issues that are challenging for traditional optimization methods to address [
13]. In the fight against COVID-2019, the BSO can be used to analyze the severity of COVID-19 in terms of the coagulation index [
14] or to perform feature selection for COVID-19 classification [
15]. In predictive computing, the BSO algorithm has advantages in terms of fast velocity, accuracy, and reliability in predicting protein structures [
16] and also demonstrates the effectiveness in the fast prediction of fixations [
17]. In the VRP, the BSO algorithm shows a strong ability to explore space [
18]. In addition, the application of the BSO algorithm can be extended to image classification [
19] and electromagnetic classification [
20]. Since BSO demonstrates powerful performance, in this study, we use the BSO algorithm to solve the model. However, since the original BSO algorithm generates new solutions randomly with fixed probability, searching for the solution space is slow and unstable. For this reason, many scholars have made improvements to the BSO algorithm. The performance of the BSO algorithm can be improved on different autonomous system (AS) ontology alignment tasks using the idea of the compact co-evolutionary [
21]. To reduce the limitation of the algorithm’s exploration capability by generating new individuals, the alternative search pattern strategy can be used to control the transition between grid-based search operators and the BSO. In this way, the BSO’s effectiveness in terms of solution quality and population diversity will significantly improve [
22]. Adding a reinforcement learning mechanism to the BSO algorithm can improve the comprehensive performance [
23]. The BSO algorithm can also be enhanced to find better or explore viable evolutionary routes and speed up the convergence by using the improved Nelder–Mead and elite learning mechanism [
24]. Moreover, combining the BSO algorithm with the orthogonal learning design [
25] or the SA algorithm [
26] can enhance the algorithm’s performance as well. The BSO algorithm, as an emerging metaheuristic algorithm, has attracted significant attention from scholars, who have studied and improved it to promote its application and development in various fields. However, despite these efforts, there are still certain shortcomings that need to be addressed. For example, while the improved BSO algorithms have shown some improvements in convergence speed, they still tend to converge relatively slowly. Additionally, it remains challenging to escape from local optima when using these algorithms.
LNS, initially proposed by Shaw [
27], is a metaheuristic approach that gradually improves an initial solution by iteratively destroying and repairing the solution. The destroy method removes a portion of the current solution, and the repair method rebuilds the destroyed portion. The destroy method often includes stochastic elements to ensure that different portions of the solution are removed each time it is applied. One popular approach is to scan all free customers and insert the one with the lowest insertion cost, repeating until all customers are served [
28]. LNS is widely used in solving various types of VRP problems due to its powerful local search capability. Goeke et al. [
29] improved the consistency of solution arrival time by incorporating LNS into solving the consistent vehicle routing problem (ConVRP). The inclusion of LNS in the model can also improve the heterogeneous fleet VRP with draft limits, which contains a large number of objectives and has high robustness [
30]. The LNS framework is used to search for efficient solutions that effectively find high-quality non-dominated solutions [
31]. In general, LNS has a powerful local search capability to find the optimal solution within a certain range. It is also because of this that the LNS algorithm is prone to fall into local optimality.
SA was first introduced by N. Metropolis et al. [
32]. The SA method is based on the analogy of cooling liquid metals to form crystals, called annealing. At high temperatures, liquid molecules have higher energy levels, making it easier for them to move towards other molecules. When the temperature is lowered, the molecules arrange themselves to find configurations with lower energy levels. By slowly reducing the temperature, the molecules can self-regulate and reach a stationary or stable state with the lowest energy level. SA is widely used in solving VRP problems. An improved SA algorithm with a crossover operator, called ISA-CO, is proposed to solve the capacitated vehicle routing problem (CVRP) [
33]. Incorporating SA in the search process yields better initial solutions. To account for multiple cross-docks and heterogeneous fleets in distribution systems, an adaptive neighborhood simulated annealing algorithm is proposed, which implements an adaptive mechanism to select neighborhood moves to improve the solution [
34]. The SA algorithm has a global exploration ability that can compensate for the local optimality issue in LNS.
Considering the powerful search capability of LNS, it can solve the shortcoming of the BSO algorithm in finding new solutions with random values and speed up the convergence speed. SA, on the other hand, can guarantee the global exploration and avoid falling into local optimum. We establish a hybrid BSO algorithm based on the LNS and SA, and the ERRP solution model is then solved using the HBSO algorithm. All abbreviations in this article are shown in Abbreviations Part.
The main innovations of this study are as follows:
- (1)
An emergency relief routing model is established, in which the dynamic distress of patients (the deprivation cost) is introduced. Patients in critical conditions can now obtain priority assistance.
- (2)
The LNS and SA algorithms’ concepts are included in the BSO algorithm, accelerating the convergence and enhancing the algorithm’s ability to avoid falling into the local optimum trap.
- (3)
The process of using random steps to find new solutions is changed to enhance the search capability in the BSO algorithm.
This paper is organized as follows.
Section 2 describes the related work of ERRP.
Section 3 introduces the description and model for the ERRP.
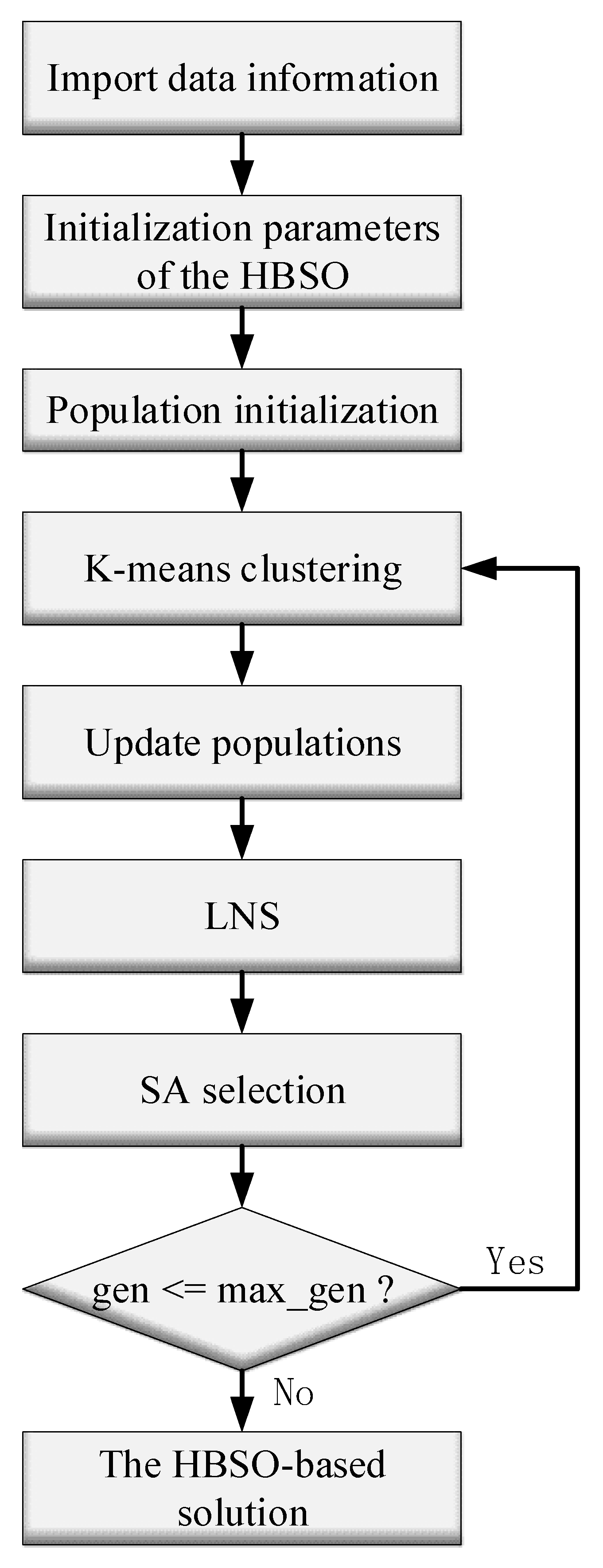
Section 4 presents the main elements of the HBSO algorithm.
Section 5 briefly describes the solution strategy of the HBSO algorithm to the ERRP.
Section 6 contains the experiments, corresponding results, and analysis.
Section 7 concludes the paper.
6. Experimental Results
The simulation experiments are divided into three groups to assess the efficacy of the HBSO algorithm. The performance is tested with different numbers of patients, namely 20, 30, and 50. The three algorithms, namely the BSO algorithm, BSO+LNS algorithm, and HBSO algorithm, are compared. Under identical circumstances, these three algorithms are separately executed 30 times.
The base data in the simulation experiments are as follows: the maximum loading capacity of the vehicle () is 300 kg, the map range is a square with a side length of 100 km, the travel speed of the vehicle () is 30 km/h, the penalty function coefficient for the violation of the capacity constraint () is 10, the penalty function coefficient for the breach of time window constraints () is 100, the number of populations () is 50, and the number of clusters is 5, the probability that a cluster center will be replaced by a random solution () is 0.4, the likelihood of selecting a cluster () is 0.5, the probability of choosing the cluster center in a cluster () is 0.3, and the likelihood of selecting the cluster centers in 2 clusters () is 0.2. The geographic locations of the patients are shown separately in the simulation experiments.
In this paper, the deprivation cost (
) of the patient at the time of obtaining relief is also added to the objective function.
is a function of the patient’s waiting time, which is a multi-stage continuously increasing function from the time a patient is injured and needs relief to the time he successfully receives relief materials.
increases with time. In the simulation experiment, we use the following Equation (26) to compute the
:
where
represents the waiting time from needing relief to receiving it for the patient
in minutes, and
is the suffering of patient
from the time of needing to receiving relief supplies.
During the simulation, time windows of each patient are subtracted from the left time window of the emergency logistics center to obtain the relative time windows of each patient and the emergency logistics center. Then, the hourly time is converted into minutes. The service time of the emergency logistics center is from 0 min (00:00) to 840 min (14:00), and time windows of each patient are also expressed by the corresponding minutes.
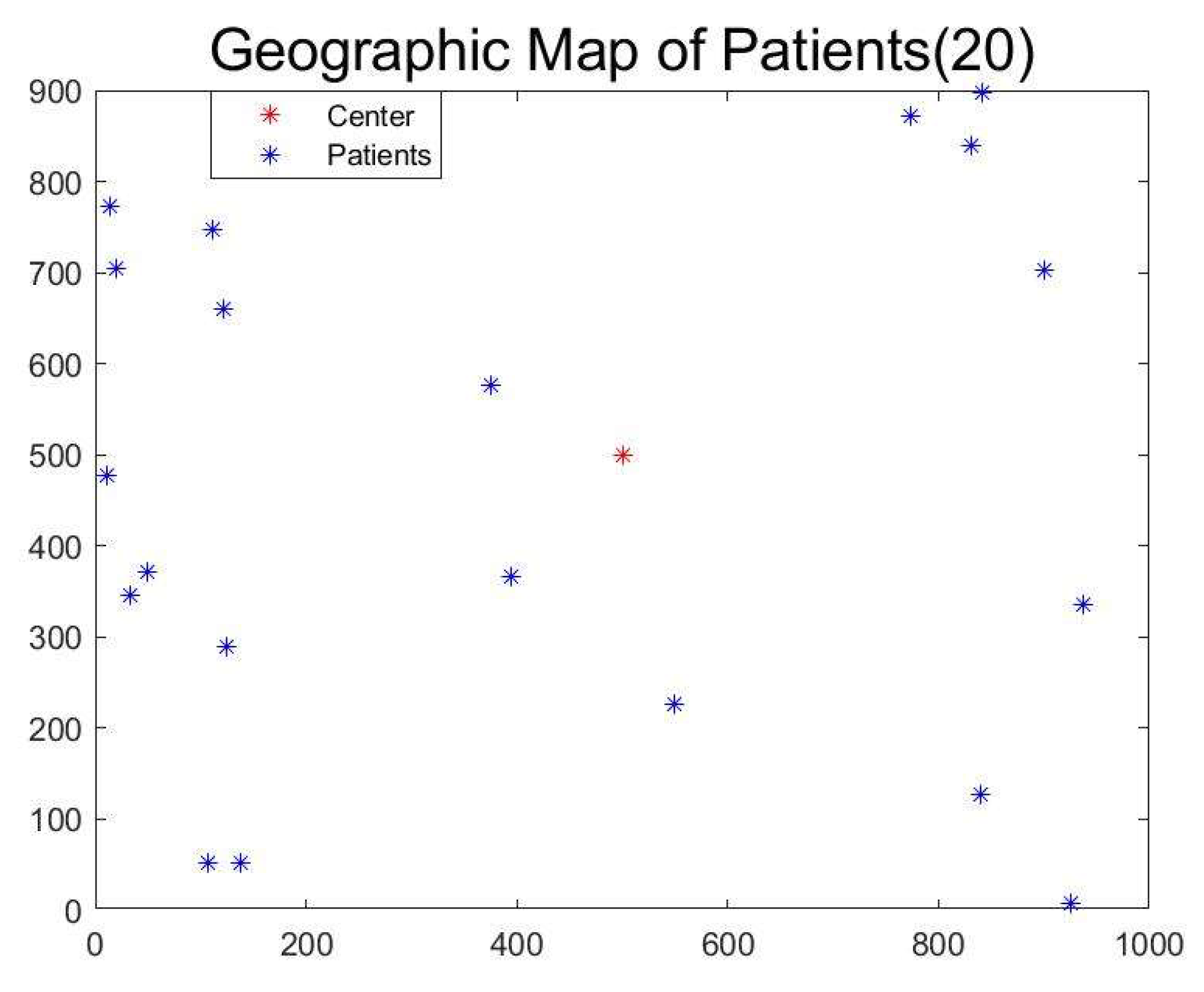
6.1. The Number of Patients Is 20
The initial location points of the 20 patients are shown in
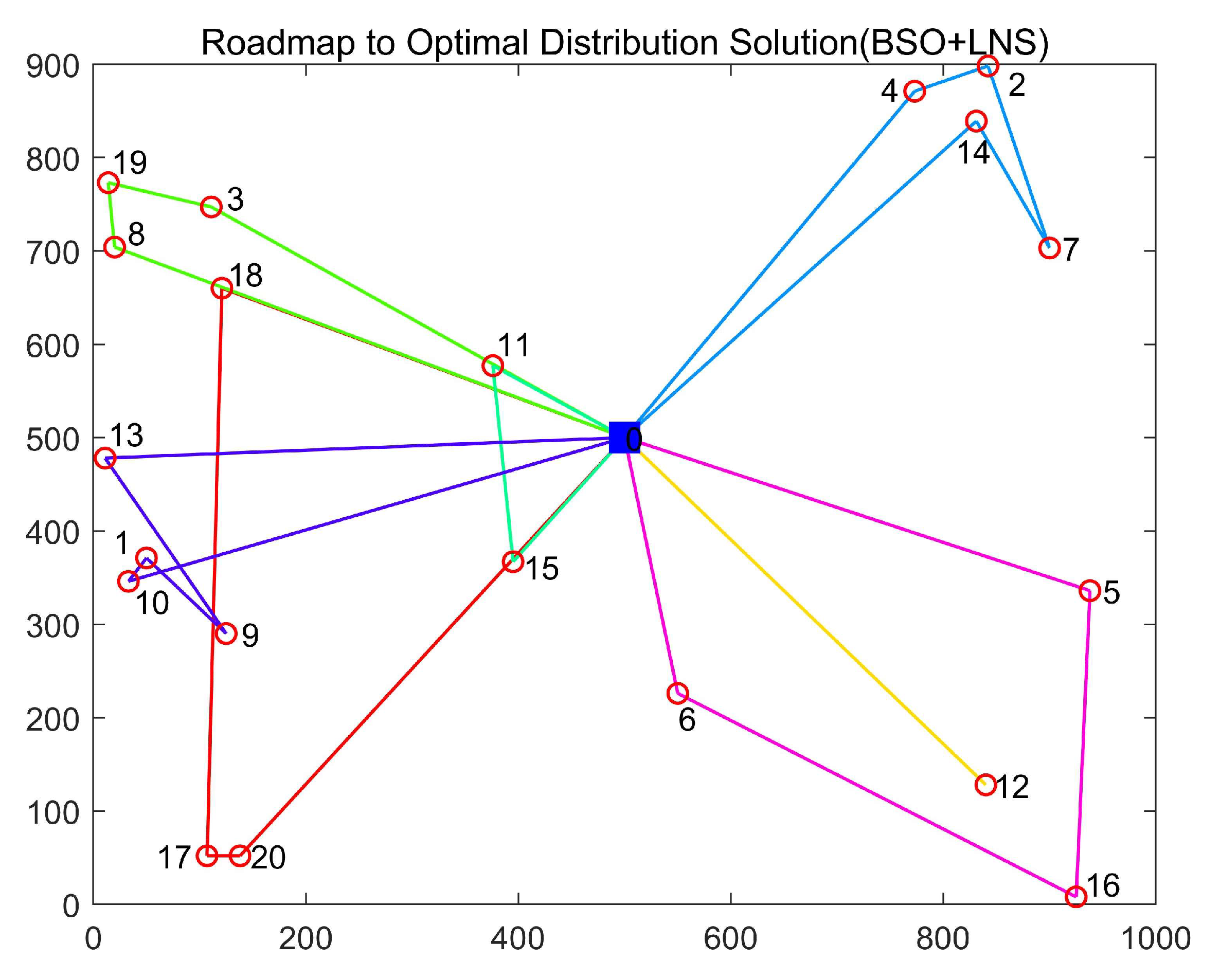
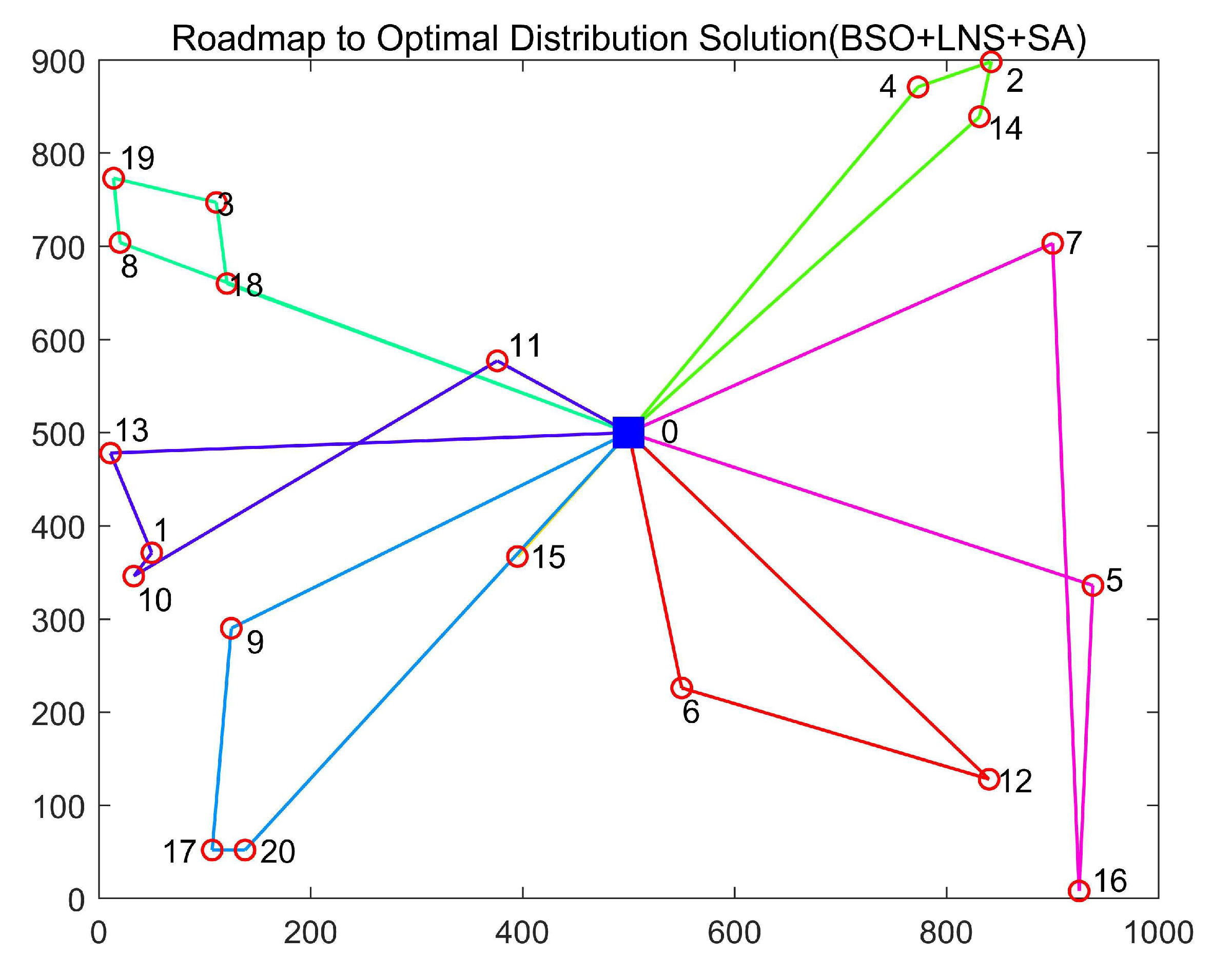
Figure 4. The maximum number of iterations is specified at 100. The BSO algorithm, BSO+LNS algorithm, and HBSO algorithm are applied to solve the model, respectively. After running three algorithms, roadmaps of the optimal relief solutions of the three algorithms are obtained, as shown in
Figure 5,
Figure 6 and
Figure 7, respectively. The final results are shown in
Table 3.
The experimental data show that the solution from the HBSO algorithm outperforms the other two methods in terms of overall performance when the number of patients is 20. The values of BSO+LNS and HBSO are significantly smaller than those of the original BSO in terms of the mean value of the objective function and the mean value of the total distance traveled. This shows that the LNS helps the algorithm to improve its ability to find the local optimal solution. Meanwhile, the variance of BSO+LNS and HBSO decreased more than 80% compared to the original BSO in terms of the variance of the objective function and the variance of the total distance traveled. It can be seen that LNS significantly improves the stability of the algorithm in finding the optimal solution. Comparing the metrics of HBSO and BSO+LNS, HBSO gets better results except for the value of the deprivation cost. It can be seen that the addition of SA also effectively improves the overall performance of the algorithm. In addition, in the variance of the objective function and the variance of the total distance traveled, HBSO is more than 30% more optimized than BSO+LNS, which can indicate that SA further helps the algorithm to improve its ability to jump out of the local optimum. For the mean value of the final deprivation cost, the results obtained by the three algorithms are not significantly different, indicating that the objective function is effectively established to prioritize relief for patients with more severe conditions.
6.2. The Number of Patients Is 30
The initial location points of the 30 patients are shown in
Figure 8. The maximum number of iterations is specified at 200. The BSO algorithm, BSO+LNS algorithm, and HBSO algorithm are used to handle the model, respectively. The optimal relief solutions from the three algorithms are acquired when the number of patients is 30, as shown in
Figure 9,
Figure 10 and
Figure 11, respectively. The final results are shown in
Table 4.
When the number of patients is 30, the solution from the HBSO algorithm functions better than the other two methods. Comparing the results of the BSO algorithm with that of the BSO+LNS algorithm, it can be found that the LNS can significantly enhance the BSO algorithm’s performance. In particular, the BSO+LNS algorithm has greatly improved the variance of the objective function and the variance of the total travel distance. In the variance of the objective function, the BSO+LNS algorithm is two orders of magnitude smaller than the BSO algorithm. At the same time, in the variance of the total travel distance, the BSO+LNS algorithm is 70% smaller than the BSO algorithm. The outcomes indicate that the solutions of the algorithm could be more stable after adding the LNS. For the objective function and the total travel distance, the BSO+LNS algorithm also has a narrowing of more than 10%. Meanwhile, the BSO+LNS algorithm and the HBSO algorithm also show some advantages in terms of the deprivation cost. Similar to the previous experiment, all the findings of the HBSO algorithm outperform those of the BSO+LNS algorithm. Compared with BSO, the stability of BSO+LNS has been substantially improved. Furthermore, both variance metrics of HBSO have been reduced by more than 50% on top of BSO+LNS. This also proves that the SA algorithm could aid the algorithm in finding better solutions and having a more stable capability.
6.3. The Number of Patients Is 50
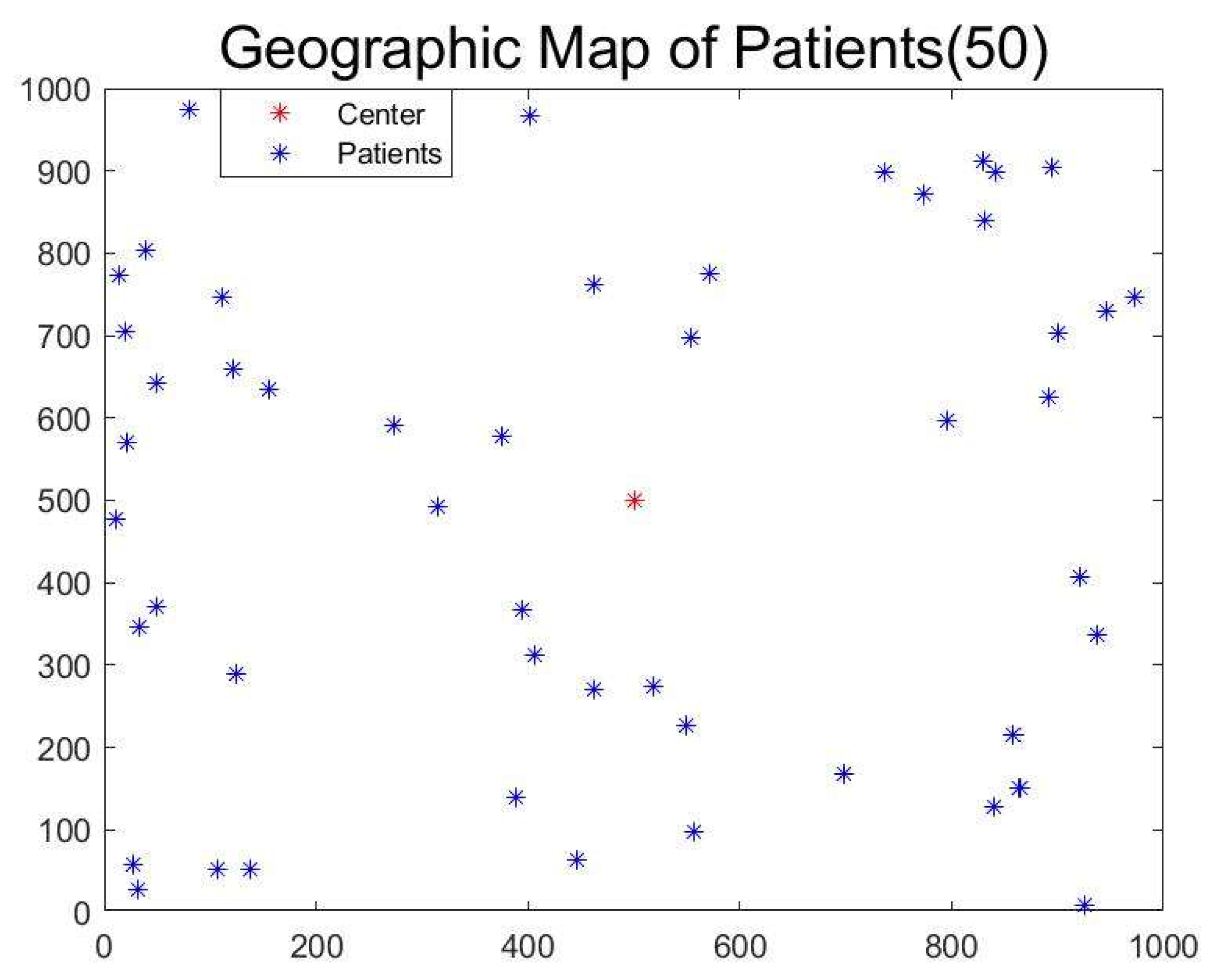
The initial location points of the 50 patients are shown in
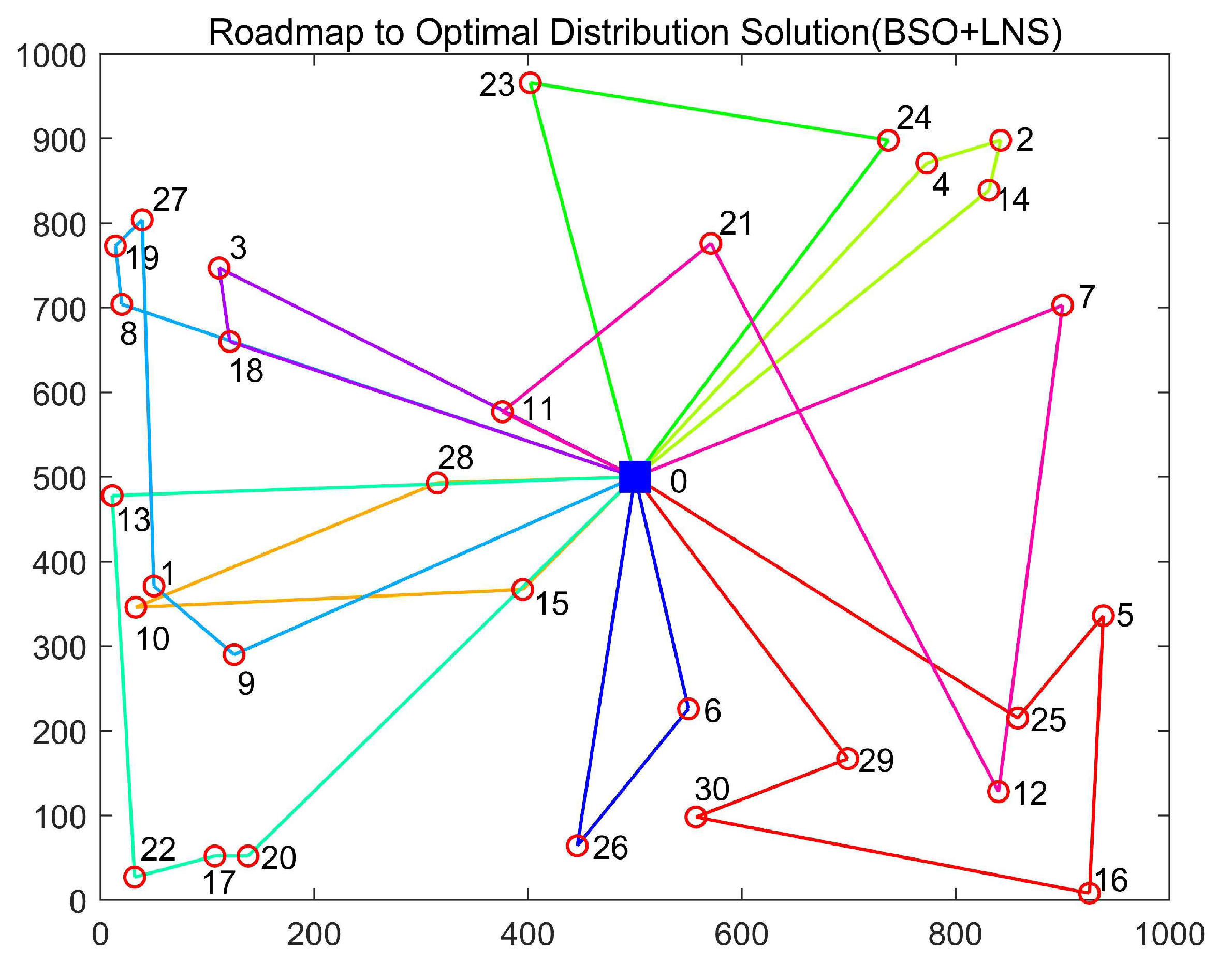
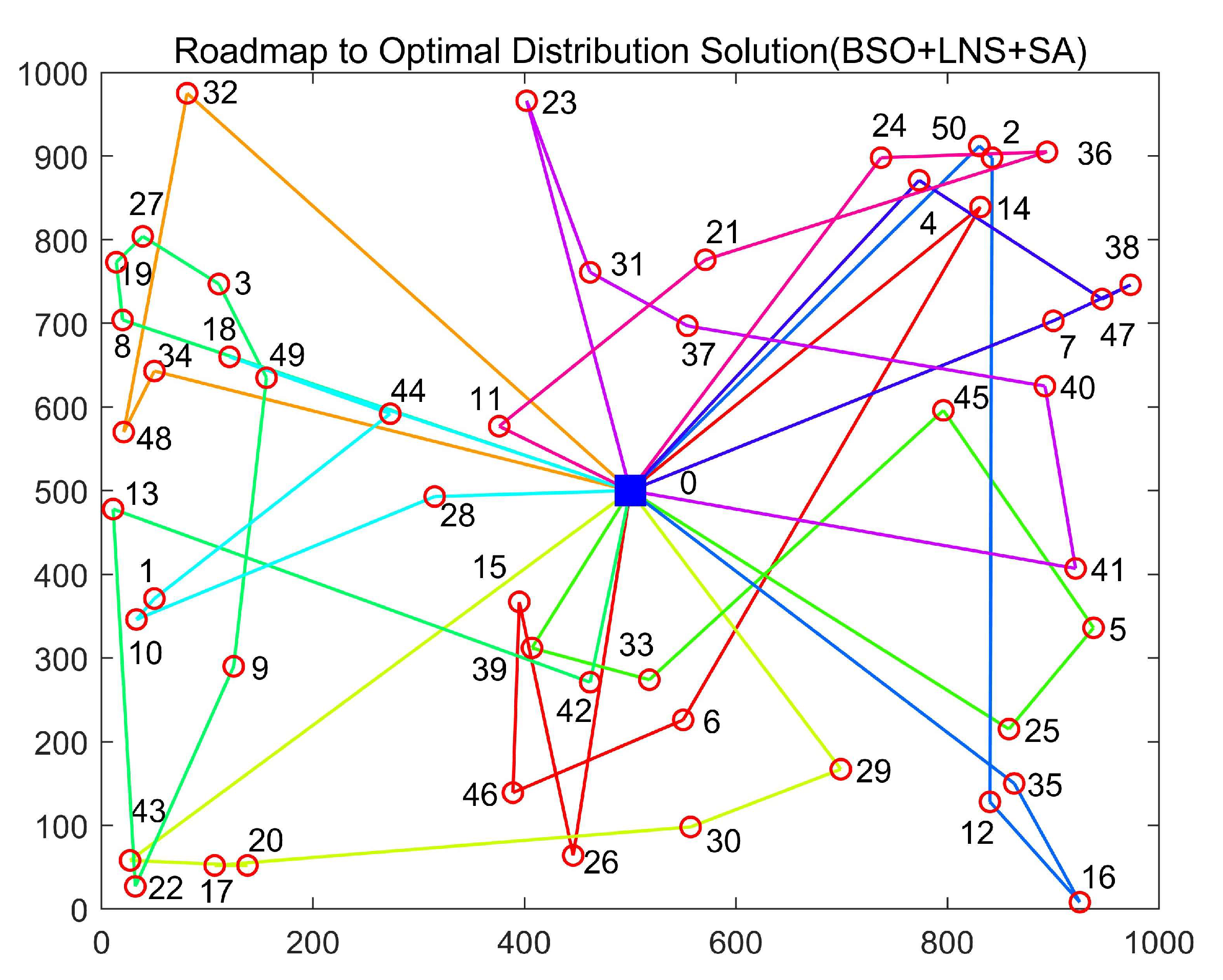
Figure 12. The maximum number of iterations is specified at 500. The BSO algorithm, BSO+LNS algorithm, and HBSO algorithm are utilized to solve the ERRP, and the optimal relief solutions of three algorithms are obtained when the number of patients is 50, as shown in
Figure 13,
Figure 14 and
Figure 15, respectively. The final results are shown in
Table 5.
The HBSO algorithm also performs more comprehensively when the patient number is 50. On the five data in the results, the BSO+LNS algorithm and HBSO algorithm have a substantial reduction compared to the original BSO algorithm. On the mean of the objective function, HBSO and BSO+LNS are reduced by more than 50%. On the variance of the objective function, HBSO and BSO+LNS are even less than 1% of the original BSO. In terms of the mean and variance of the total distance traveled, HBSO and BSO+LNS have more than a 20% reduction. In particular, the final value of the deprivation cost of both decreases by more than 60%. Among them, the HBSO algorithm outperforms the BSO+LNS algorithm in four aspects: the mean value of the objective function, the mean value of the total travel distance, the variance of the total travel distance, and the final value of the deprivation cost. In the variance of the objective function, the HBSO algorithm shows a small increase. In general, the HBSO algorithm still has great advantages.
6.4. The Optimal Relief Solutions
In this section, we intercept the optimal solutions of the three algorithms with the smallest objective function values in 30 independent runs for analysis. The objective function values for the three sets of the total of nine results are plotted as histograms in
Figure 16, and the data are presented in
Table 6.
It can be found that the HBSO algorithm has been greatly improved over the original BSO algorithm for 20, 30, and 50 patients. This demonstrates the efficiency of the HBSO algorithm for solving the ERRP. Comparing the HBSO algorithm with the BSO+LNS algorithm, the results of HBSO are smaller for 20 and 50 patients. This indicates that the HBSO algorithm is able to find better solutions with the addition of the SA algorithm. The optimal solution of the HBSO algorithm is larger than the optimal solution of the BSO+LNS algorithm for a patient number of 30. Despite this, in chapter 5.2, we learn that the mean value of the objective function in 30 independent runs of the HBSO algorithm is less than that of the BSO+LNS. This shows that the HBSO algorithm is more stable than the BSO+LNS when solving the ERRP.
6.5. Discussion
After comparing the performance of HBSO, BSO+LNS, and the original BSO at patient numbers of 20, 30, and 50, the following conclusions were reached:
(1) Comparing the performance of BSO+LNS and the original BSO, it was observed that the addition of LNS significantly improved the convergence and stability of the algorithm. The neighborhood search behavior of LNS was found to be effective in finding optimal solutions, as evidenced by the decrease in the objective function value and total distance traveled. This improvement can be attributed to the local search operation performed during the iterative process of the BSO+LNS algorithm, which enhances the degree of exploitation and facilitates the identification of better individuals. The stability of BSO+LNS was also significantly improved, as evidenced by the two variance metrics. Furthermore, the deprivation cost was significantly optimized at patient number 50, which was not observed at patient numbers 20 and 30. As the number of patients increased, the algorithm with the addition of LNS exhibited superior optimization-seeking performance. These results confirm the effectiveness of incorporating LNS into BSO.
(2) The combined performance of HBSO was found to be superior to that of BSO+LNS, based on the results. At patient numbers 20 and 30, HBSO exhibited smaller variance, indicating greater stability in finding optimal solutions. HBSO only showed a slight optimization in the mean of the objective function and the mean of the total distance traveled. However, at a patient number of 50, HBSO exhibited more significant optimization than BSO+LNS in the mean value of the objective function, the mean value of the total distance traveled, and the deprivation cost. The analysis of the 30 results indicated that the HBSO algorithm with SA added possessed a stronger ability to find the optimal solution. The selective retention of non-optimal individuals according to the probability facilitated a deeper exploration of the solution space, resulting in a strong global search capability. However, HBSO exhibited a slight increase in the variance of the objective function at patient number 50 compared to BSO+LNS, possibly due to an imbalance in the relationship between LNS and SA. This will be addressed in future studies.
To demonstrate the efficacy of the model with the inclusion of the deprivation cost, the two models with and without the deprivation cost are compared. The objective functions with and without deprivation costs are used in three cases with patient numbers of 20, 30, and 50, respectively. The HBSO algorithm was then applied to solve the problem, each with 30 independent runs. After averaging the data, the results obtained were shown in
Table 7 and plotted as a bar chart in
Figure 17, where deprivation cost 1, 3, and 5 are the distress levels of patients in the solutions when the number of patients is 20, 30, and 50, respectively, without adding the deprivation cost to the model. Deprivation cost 2, 4, and 6 are the distress levels of patients in the solutions when the model with deprivation cost is applied, respectively.
It is easy to tell from the figure that adding the deprivation cost to the model can significantly reduce the level of patients’ suffering. When the concept of deprivation cost is not introduced, although less costly solutions for distribution can be found, the patients will have to endure a greater amount of distress. This also shows that the traditional way of solving the VRP cannot be directly applied to the solution of the ERRP. The solution model that includes the deprivation cost is more in line with the fundamentals of providing humanitarian relief in post-disaster situations.
Algorithm complexity analysis is a crucial aspect of algorithm design and evaluation. In this study, we analyzed the time and space complexity of the proposed hybrid algorithm, which combines three different algorithms, namely BSO, LNS, and SA, to achieve superior performance. Our analysis reveals that there is no significant difference in complexity between BSO, BSO+LNS, and HBSO. Specifically, the time complexity of these algorithms is , and their space complexity is .
In summary, our findings indicate a significant improvement in the synthesis ability of the HBSO algorithm as compared to the other two methods. The incorporation of LNS enhances the algorithm’s ability to exploit the solution space and discover superior individuals. By selectively retaining non-optimal individuals based on probability, the algorithm achieves a more comprehensive exploration of the solution space and a stronger global search capability. Additionally, our model, which incorporates deprivation cost, significantly reduces patient suffering, resulting in a higher likelihood of successful rescue and a more compassionate approach to healthcare.
7. Conclusions
In this paper, we introduce a novel approach for analyzing emergency relief routes that considers the well-being of patients by incorporating the deprivation costs of patients into the objective function. In addition, our model takes into account the total travel distance, penalties for violating time windows, and penalties for exceeding loading capacity. To optimize the model, we propose a new metaheuristic algorithm, HBSO, which integrates SA, LNS, and BSO algorithms. Simulation experiments are conducted to evaluate the effectiveness of the HBSO algorithm, which outperforms existing methods by achieving lower total cost (as reflected by smaller objective function values) and providing more stable solutions with smaller variances. Our study also demonstrates the feasibility of the BSO algorithm for solving route optimization problems. Importantly, our approach aims to alleviate the suffering of patients, which aligns with the humanitarian spirit of emergency relief.
The use of the BSO algorithm for optimizing vehicle routes has practical implications for material distribution in real-world scenarios. Moreover, the performance of the HBSO algorithm in the emergency relief routing model provides valuable insights for emergency relief actions. Our proposed HBSO algorithm effectively enhances the performance of the BSO algorithm in emergency relief problems by integrating LNS and SA selection steps, enabling the algorithm to obtain superior solutions and avoid local optima. Future research could explore the application of HBSO algorithms to other disaster management problems, such as resource allocation and emergency evacuation planning, or adapt the algorithms to solve optimization problems in other domains, such as transportation or logistics. In addition, future research could investigate the performance of HBSO algorithms on larger scale problems or on different types of input data. However, it should be noted that obtaining accurate patient location information in real-life emergency relief operations may not always be feasible, as opposed to the simulation experiments presented in this study. Therefore, developing an efficient method for rapidly updating relief routes as patient locations change in real-time is a critical research topic that warrants further investigation. In our future research, we plan to focus on developing a method that can effectively and efficiently update relief routes in response to changing patient location information to improve the timeliness and effectiveness of emergency relief operations.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}