1. Introduction
Autism spectrum disorder (ASD) is a neurodevelopmental disorder that causes problems in social communication and interaction [
1]. Unfortunately, ASD has become more prevalent in the last two decades [
2]. On the other hand, studies show that early diagnosis resulting in early intervention can effectively reduce the disorder’s impacts. However, diagnosing autism requires experts to observe children and interview parents to determine the severity of the symptoms during multiple time-consuming and challenging sessions. Furthermore, many cases remain undiagnosed due to the limited access to experts, especially in low and middle-income societies. Consequently, it becomes essential to develop technology-based screening methods to make screening services affordable and widely available to overcome these challenges.
A very straightforward approach to employing technology was to automate CHAT family questionnaires [
3] and make them available online through mobile apps or web applications [
4]. Furthermore, these methods employ machine learning algorithms to improve screening accuracy [
5]. Although these methods have proved to be credible, they rely on licensed clinicians and observers to correctly answer the questions [
3,
6].
To overcome the shortcomings of the questionnaire-based systems, many researchers have focused on the biological markers of ASD [
7] using brain imaging techniques, such as fMRI [
8] or EEG [
9]. Amid all evidence that confirm the effectiveness of the mentioned approaches, the required equipment makes them less accessible. Additionally, putting a child in an fMRI or putting an EEG cap on a child’s head may cause a lot of discomfort limiting the usage of these procedures.
There are other technology-based approaches, such as wearable devices, like smart glasses or sensors [
10,
11], which are more convenient options than fMRI or EEG. Despite the lower cost of these systems compared to fMRI and EEG, they still need to be conducted at highly specialized centers. On the other hand, there are many studies focused on intelligent observation of behaviors to overcome the challenges of biometric and wearable methods. For instance, Moghaddas et al. [
12] developed a vision-based method for ASD screening based on the interaction between children with ASD and a parrot-like robot. Although this approach tackles some of the mentioned difficulties in wearable methods, it still depends on specialized centers to conduct this screening approach.
That is why home-based IoT devices, such as the sensorized toy car [
13], were designed to perform screenings in children’s natural settings at a very low cost. Along with this trend, in this study, we improved the sensorized toy car by incorporating two shaft encoders on the wheels of the car. We wanted to investigate if children with autism focus on the rotation of the wheels instead of the whole car more than Typically Developed (TD) children. This new modality, combined with its initial modality, helped improve screening accuracy by more than 10%. In other words, our contribution is in introducing a new modality and incorporating it with another modality to better screen children with ASD. The proposed approach can be incorporated into other screening methods to increase the accuracy of such screening methods. It should be noted that relying on IoT and having a widespread ASD screening system allows promoting the well-being of all at all ages. In other words, such systems facilitate the sustainable development of countries by providing widespread screening of ASD.
2. Related Work
While questionnaires, such as M-Chat, have become an integral part of the assessment process of ASD, their accuracy is limited due to the subjective nature of responses from parents or caregivers. Consequently, The American Academy of Pediatrics advocates for a more comprehensive evaluation, including developmental, behavioral, and cognitive assessments to conclusively diagnose ASD [
14]. Thabtah et al. showed that the questionnaire-based approaches are more proficient in accurately detecting characteristics of ASD compared to traditional methods [
15].
The main disadvantage of the traditional screening/diagnosis tools is in their need for experts to run them. Furthermore, the questionnaire-based or observation-based methods rely on the person handling them. Thus, they suffer from inaccuracy and bias in answering questions or in observations. To address these challenges, several studies focused on developing methods to observe ASD symptoms automatically using biomarkers or behavioral markers [
16,
17,
18,
19,
20,
21,
22].
That is why machine-learning-based methods have been heavily approached in the past decade. Kohli Kar et al. [
16] conducted a scoping review to examine the role of intelligent technologies in the early detection of ASD. Their findings suggest that intelligent technologies can be used to detect ASD at an early stage with high accuracy. Belen, R. A. J. et al. [
17,
18] conducted a systematic review evaluating a total of 33 studies that used computer vision techniques to screen children with ASD. Their summarization shows that computer vision techniques had been used to measure facial expressions, body language, and social interactions in children with ASD. The authors concluded that computer vision has the potential to effectively analyze behavioral markers.
It is worth reminding the reader that many of the above technology-based ASD screening methods, such as the ones based on fMRI or EEG, are costly, require skilled operators to run them, and are not widely available. Furthermore, each approach would evaluate one or a few aspect(s) of autism symptoms. Thus, having other technology-based methods that evaluate ASD from other points of view would be beneficial for better screening ASD.
Toys can be equipped with sensors and be used to collect data for online or offline analysis. Different sensors can capture different data, such as playing patterns, which can be used for classification. For instance, Lanini M. et al. combined accelerometer, gyroscope, and magnetometers data [
19]. Additionally, Moradi et al. introduced a platform for autism screening based on acceleration data of a toy car whose Wiimote controller was used as a sensor hub. A Matlab program was developed to interact with the system to collect accelerometer data in x, y, and z axes to investigate distinctive playing patterns. They trained an SVM classifier with 85% accuracy [
13]. Also, Laura Boccanfuso et al. [
20] used the accelerometer data of a Sphero robot for ASD screening. They analyzed the accelerometer data as a modality to study the child responses to different robot behaviors. Beibin Li et al. [
21] used accelerometer and gyroscope sensor data in Sphero, a commercially available robot, in order to classify behaviors in children with autism. They managed to differentiate the kick, drop, hold, and “no interaction” parts of child–robot behavior with an accuracy of 48.82%.
A summary of the screening/diagnosis approaches listed in the above papers have been presented in
Table 1. In this table, we aimed to bring a sample of each approach highlighting their accuracy, sensitivity, and specificity. There are cases that have not reported these measures. Furthermore, we have listed their drawbacks in the last column of the table. In the drawbacks, a biased opinion means that answers depend either on the expertise of examiners or on the understanding, punctuality, or intentions of parents who answer the questions. In other words, the questionnaires are subjective. An advantage of the approaches proposed by Khozaei et al. [
22] and Moradi et al. [
13] is their capability to be used in natural settings, which involve noise and unwanted data. However, they need extra caution to process data accurately. Finally, it should be noted that most of these methods are in their initial stages and need further study to prove their usability and reliability.
In our research, the sensorized toy car 2.0 is introduced. It extends the previous version’s functionality by adding shaft encoders to the wheels to measure the wheels’ rotation data for screening ASD. Our contribution in this study is in: (1) Introducing a new modality; and (2) Suggesting new features for ASD screening. It should be noted that our approach can be a complement to other screening methods to increase the overall accuracy of ASD screening. In other words, we do not want to directly compare our proposed approach to other approaches that use other modalities, such as the approaches listed in
Table 1. Rather, we want to: (1) Compare our results to the previous study on the sensorized toy car to show its advantage over the original version; and (2) Recommend using this approach as another approach for initial screening that can be used as a complement to other approaches.
3. System Design
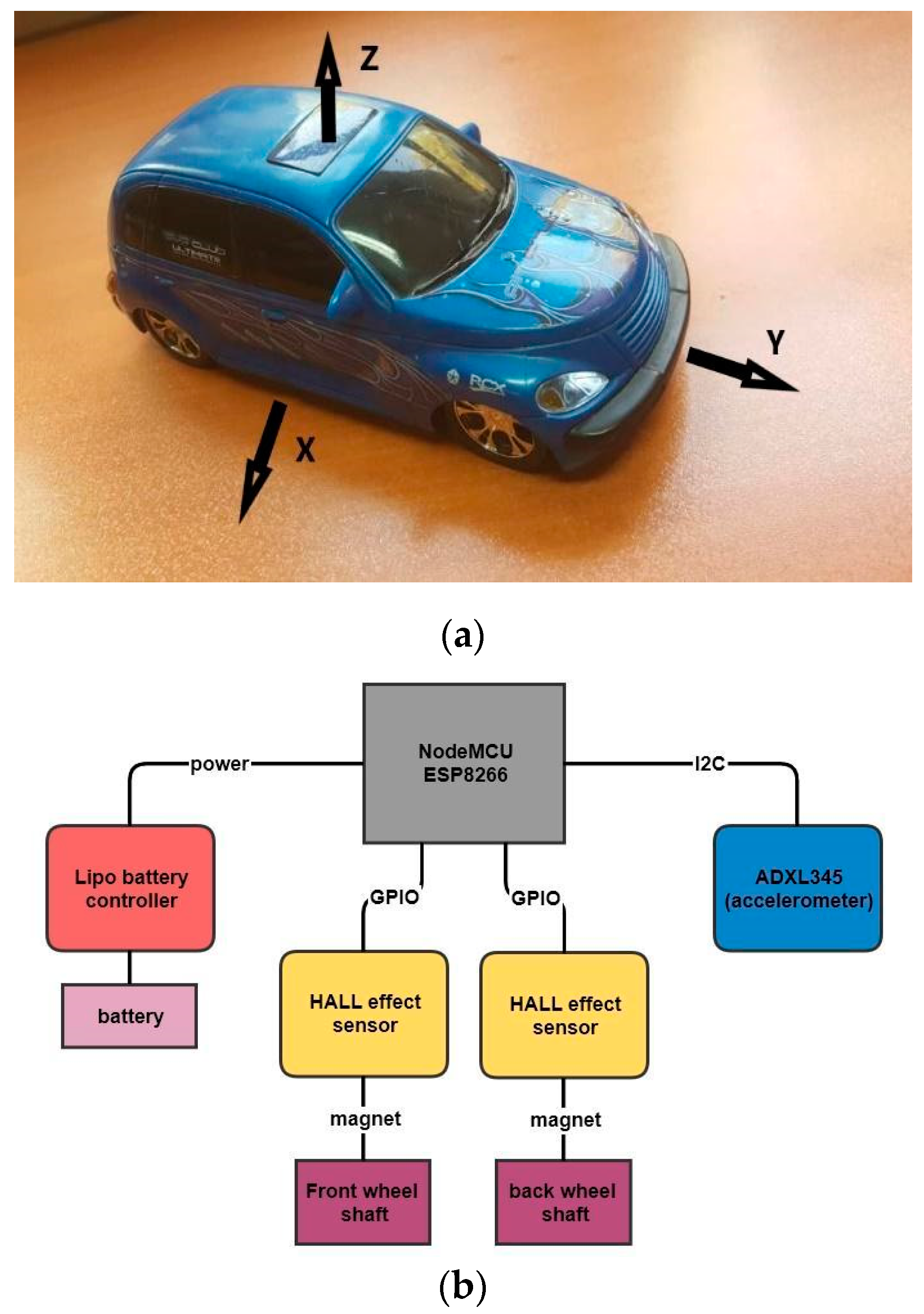
The sensorized toy car (
Figure 1a) is designed to capture two major symptoms: (a) The obsessive attention to detail; and (b) The repetitive behaviors. In order to collect playing pattern data using an accelerometer sensor, an inexpensive IoT board called ESP8266 NodeMCU is used. The ESP8266 board reads sensor data and sends them wirelessly to an application through Wi-Fi via the UDP protocol to ensure a maximum data collection rate. A MEMS accelerometer, i.e., an ADXL345, is used to capture acceleration data. Two magnetic shaft encoders, based on the Hall effect, are installed on the car’s front and back wheels. The whole system runs on a battery and the electronic parts are embedded inside the car deliberately to avoid any distraction. The diagram of the system is shown in
Figure 1b.
The sensorized toy car firmware is based on the Arduino ecosystem to simplify future R&D activities. Additionally, an ROS (robotic operating system) package is developed for interfacing with the sensorized car. It makes integrating the sensorized toy car into other screening systems straightforward.
4. Experiments
The data collection process took place in an autism center in Tehran, Iran. The sensorized toy car was tested on 50 children, whose ages ranged from 3 to 6 years old and were divided in three different groups: children with ASD, typically developed children (TD), and children with other disorders (with CP and with fragile X syndrome). The details of their demographic information are shown in
Table 2. We did not try to have a similar number of boys and girls since it has been shown that the play complexity and toy engagement of children with ASD in both genders for car-like toys are almost similar [
13,
30]. The subjects played with the sensorized toy car for about 3 to 5 min in a 3 × 4 m room. The children could play in the test room alone or with their parents or therapists. The recorded data consist of the play time, acceleration along the x, y, and z axes, and front and rear wheel rotation counts. These data were saved in a database with each participant’s unique ID, without including name or other personal information to preserve user anonymity and privacy.
In this study, all the ethical standards were observed. The parents were informed about the study, the goals, the study procedure, and the rights of the parents and the children. It was explained that this is a non-intrusive screening study without any issue for children. Consent, in accordance with the Declaration of Helsinki, was obtained from all the participants. A child psychologist from the autism center supervised the process.
The ASD group consisted of 28 children. Five children with ASD did not seem interested in playing with the sensorized toy car and neglected it completely. All TD children were very interested in playing with the car. Children with fragile X syndrome and CP also played with the car but with less enthusiasm. Generally, the TD children played with more energy and they moved the car in a wider area compared to the other two groups.
5. Feature Extraction
As mentioned earlier, the sensorized toy car is designed to capture children’s movement behaviors and their interest in rotating objects, which can be used to discriminate between children with ASD from TD children. In this study, we analyzed movement patterns using features extracted from the acceleration data [
13]. Furthermore, the shaft encoders’ data were added to the model to determine interest in rotating objects and their rotations. The idea of adding shaft encoders to the car was initiated after testing the first version of the car on children with ASD. We observed that children with ASD spent a great amount of time on rotating the wheels and watching them rotate. In contrast, although the TD children were interested in the wheels and their rotations, they spent significantly less amount of time on playing with the wheels and watching them compared to children with ASD.
It should be noted that the children’s interaction with the car can be divided into four states: (1) Not playing; (2) Playing only with the wheels; (3) Playing on the floor; and (4) Playing in the air.
In the “not playing” state, the sensorized toy car is almost stationary and has no movements. Thus, both the shaft encoders and acceleration signals are almost fixed. The “playing only with the wheels” state is when the sensorized toy car is almost motionless while its wheels are rotating. In this case, the shaft encoders show changes while there is no significant change in the acceleration values. This state exactly represents the interest in rotating objects and objects’ rotation. In the “playing on the floor state”, in which movement patterns can be extracted, the car is moved and both acceleration and shaft encoder values change. Finally, the “playing in the air” state is when the car is moved in the air, and the acceleration values change while the wheels are not rotating. Thus, the shaft encoders’ signals show almost zero rotation.
To analyze the data and determine the state of the car, two sets of features were designed and extracted: (a) Acceleration features representing the pattern of the car movement (
Table 3), which are similar to the previous research conducted in [
13]; and (b) Wheel rotation features representing children’s interest in the wheels’ rotation. To analyze the rotation of the wheels in the four mentioned states, two other features were extracted using short-term Fourier transform [
31] from acceleration data that represent the roll and pitch of the car while playing with the wheels. Based on the above state analysis, and side by side with the original features proposed in [
13], the following extra features (
Table 4) were designed and extracted. In these features, the interactive playtime means the summation of times spent in States 2 to 4.
6. Classifier’s Structure
To train classifiers, the collection of 46 subjects’ data was divided into two groups: the training set with 80% of samples and the test set with 20% of the remaining samples. The K-fold cross-validation method [
32] separated the test set in k = 5 different ways to generalize the result and make it more reliable. The average accuracy, sensitivity, specificity, and precision of the trained models are reported in
Table 4. Although in the previous study [
13], the SVM classifier was selected as the best classifier for this task, we studied other methods, such as the random forest approach and MLP with data augmentation strategies too (
Table 4). Nonetheless, at the end, SVM was the most promising classifier for the collected data. Moreover, by performing several tests on three kinds of SVM, SVM with a linear kernel was selected for its considerably better performance on our data [
32].
7. Feature Selection
Since the size of the training set is small compared to the size of the feature vector, feature reduction is necessary before applying machine learning methods. Addressing the mentioned problem, we applied two consecutive backward eliminations on all the features. In the first step to reduce the number of features, the correlation between features in each modality was examined. Then, the best features were selected from each highly correlated feature set using the backward elimination method [
32]. This method effectively reduces the size of the feature vector by about 30%. After reducing the number of features in each modality, the best features among all modalities were selected by the backward elimination method in another round of feature selection. The best result was obtained by integrating seven acceleration features and three shaft encoder features. The selected features from the shaft encoders’ features are the playing only with wheels ratio, not playing ratio, and total wheel turn rate. The most effective acceleration features are the jolt in the Y direction, tilt about Y-axis, the energy of the signal in the X direction, correlation of the acceleration signals between X and Y directions, the fourth highest frequency in the X direction, the fifth-highest frequency in the Z direction, and the relative amplitude of the highest frequency in the Y direction.
Then, in the final step, the selected features from the two modalities were combined in an early fusion to select and train the best classifier. In other words, all the selected features from the shaft encoders and the accelerometer were considered together to perform the training and test steps.
8. Results
The classification result based on the previous study on the sensorized toy car [
13] is used as a baseline to examine the performance of adding the shaft encoders’ features to the model. The same SVM method, presented in [
13], is applied on the selected acceleration features to classify the new data. The best accuracy based on the original acceleration features (baseline features) is 71.11%, as shown in
Table 5. It should be mentioned that this accuracy is lower than what reported in [
13] since the data are different and the setups for collecting data were different too. Furthermore, we implemented the original method in [
13] from scratch, which may differ in the way that it was optimized before. By adding the shaft encoders’ features to the original acceleration features, the accuracy is increased to 78.61%. When the new acceleration features, i.e., the role and pitch of the car, are added to the model, the accuracy is increased from 71.11% to 75.83%. Finally, by adding the shaft encoders’ features and the new acceleration features, the accuracy reached 85.56% (
Table 5).
9. Discussion
As shown in
Table 5, the performance of the new proposed multi-modal approach is better than the previously suggested single modal approach. The added shaft encoders’ features and the new acceleration features have improved not only the accuracy, but also the other main metrics, such as the recall and the precision. It is obvious that the classifier is more reliable in both situations whether predicting normal or ASD subjects. The confusion matrix of the classifier represents the same results (
Figure 2). The true positive (ASD) and true negative (TD) values are considerably higher than the false negative and false positive values. It should be noted that the sensitivity and specificity of the random forest method is better than SVM despite its lower overall accuracy. That is why a user may prefer random forest over SVM since it may miss a smaller number of children with ASD compared to the SVM method. Furthermore, it may mislabel a smaller number of TD children as children with ASD compared to the SVM method.
The novelty of this research is in its multi-modal structure that results in the examination of ASD through a wider variety of symptoms. To reach this purpose, shaft encoders were added to the system, which increase the number of features. This is an important factor in screening children with ASD. It is important since children with ASD may be at different parts of the ASD spectrum and evaluating them based on different modalities is very important. In other words, a child with ASD may show some symptoms of ASD, while another child with ASD may show other symptoms of ASD. Thus, having a comprehensive set of screening methods is necessary for ASD screening.
Beside the mentioned benefits of the sensorized toy car, evaluating a child in his/her normal environment through a toy car is another advantage of the proposed sensorized toy car. The other proposed methods, such methods based on fMRI, EEG, and robots, need experts to run them, are costly, and mainly cannot be performed in normal settings.
10. Conclusions
In this paper, we introduced the sensorized toy car 2.0, in which multi-modal ASD screening is planned. The new design incorporates shaft encoders to capture the tendency of children with ASD to rotate objects. Furthermore, we improved the feature selection strategy to increase the system accuracy by multi-modal ASD symptom analysis. The advantage of this system over other screening methods is in its low cost and limited requirement for experts, which make it a prominent option for initial ASD screening at homes, daycares, or clinics. Furthermore, it can be part of a multi-modal system to evaluate children with ASD from different aspects to increase the overall accuracy and other measures of the system. We expect that having more modalities observed can improve screening compared to unimodal evaluation.
Such a low-cost and expert-independent reliable initial screening of ASD allows widespread accessibility to screening for ASD. Considering the increased rate of ASD around the world [
33], such a system would be a move toward the sustainable development of countries by providing accessible ASD screening, especially in rural areas. In other words, such systems can provide equal opportunity of screening cognitive deficits around the world. It should be noted that this study contributes to the United Nations’ Sustainable Development Goals (SDGS) [
34] by using IoT technology and machine learning approaches to provide reliable ASD screening. It can improve the health and well-being of people with ASD, their families, or their caregivers by providing an automated screening method.
For future research, we have to test the system on a wider sample of the population and on a variety of cognitive deficits to determine whether it can differentiate between different cognitive deficits. Consequently, at this stage, it can be used as a warning system to inform parents and caregivers to turn to experts for further evaluation. Furthermore, we have to investigate the effects of the size, shape, and color of the car on the results and the usage of the car by children.
Author Contributions
Conceptualization, P.S. and H.M.; Methodology, B.M., P.S. and H.M.; Software, B.M. and S.N.; Validation, B.M.; Formal analysis, B.B.; Investigation, B.M. and P.S.; Data curation, B.M. and P.S.; Writing–original draft, B.M.; Writing—review & editing, H.M.; Supervision, H.M.; Project administration, H.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
1. The proposal of this work was accepted by the school of ECE at the University of Tehran considering the privacy of participants and non-intrusiveness of the screening nature of the work; 2. This is a non-intrusive screening that does not require ethics approval as long as the privacy of the participants is considered. Furthermore, all the ethics guidelines have been fully considered, including obtaining consent form to parents; 3. The work was supervised by the guidelines of the autism center that we conducted the study in. They have their own guidelines that we had to follow.
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Edition, F. Diagnostic and statistical manual of mental disorders. Am Psychiatr. Assoc. 2013, 21, 591–643. [Google Scholar]
- Autism and Developmental Disabilities Monitoring Network Surveillance Year 2010 Principal Investigators. Prevalence of autism spectrum disorder among children aged 8 years—Autism and developmental disabilities monitoring network, 11 sites, United States, 2010. Morb. Mortal. Wkly. Rep. Surveill. Summ. 2014, 63, 1–21. [Google Scholar]
- Thabtah, F.; Peebles, D. Early autism screening: A comprehensive review. Int. J. Environ. Res. Public Health 2019, 16, 3502. [Google Scholar] [CrossRef] [PubMed]
- Brooks, B.A.; Haynes, K.; Smith, J.C.; McFadden, T.; Robins, D.L. Implementation of Web-Based Autism Screening in an Urban Clinic. Clin. Pediatr. 2015, 55, 927–934. [Google Scholar] [CrossRef]
- Shokoohi-Yekta, M.; Mahmoudi, M.; Bonab, B.G.; Bagherzadeh, A.A.; Moradi, H.; Pouretemad, H.R. Developing Autism Screening Expert System (ASES). Glob. J. Technol. 2013, 4, 1063–1068. [Google Scholar]
- Crane, L.; Chester, J.W.; Goddard, L.; A Henry, L.; Hill, E. Experiences of autism diagnosis: A survey of over 1000 parents in the United Kingdom. Autism 2015, 20, 153–162. [Google Scholar] [CrossRef]
- Hewitson, L. Scientific challenges in developing biological markers for autism. OA Autism 2013, 1, 7. [Google Scholar] [CrossRef]
- Eslami, T.; Saeed, F. (Eds.) Auto-ASD-network: A technique based on deep learning and support vector machines for diagnosing autism spectrum disorder using fMRI data. In Proceedings of the 10th ACM International Conference on Bioinformatics, Computational Biology and Health Informatics, Niagara Falls, NY, USA, 7–10 September 2019. [Google Scholar]
- Bosl, W.J.; Tager-Flusberg, H.; Nelson, C.A. EEG Analytics for Early Detection of Autism Spectrum Disorder: A data-driven approach. Sci. Rep. 2018, 8, 1–20. [Google Scholar] [CrossRef]
- Rad, N.M.; Kia, S.M.; Zarbo, C.; van Laarhoven, T.; Jurman, G.; Venuti, P.; Marchiori, E.; Furlanello, C. Deep learning for automatic stereotypical motor movement detection using wearable sensors in autism spectrum disorders. Signal Process. 2018, 144, 180–191. [Google Scholar]
- Nag, A.; Haber, N.; Voss, C.; Tamura, S.; Daniels, J.; Ma, J.; Chiang, B.; Ramachandran, S.; Schwartz, J.; Winograd, T.; et al. Toward Continuous Social Phenotyping: Analyzing Gaze Patterns in an Emotion Recognition Task for Children with Autism Through Wearable Smart Glasses. J. Med. Internet Res. 2020, 22, e13810. [Google Scholar] [CrossRef]
- Moghadas, M.; Moradi, H. Analyzing human-robot interaction using machine vision for autism screening. In Proceedings of the 2018 6th RSI International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 23–25 October 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Moradi, H.; Amiri, S.E.; Ghanavi, R.; Araabi, B.N.; Pouretemad, H.-R. (Eds.) Autism Screening Using an Intelligent Toy Car. In Proceedings of the Ubiquitous Computing and Ambient Intelligence: 11th International Conference (UCAmI 2017), Philadelphia, PA, USA, 7–10 November 2017; Springer: Cham, Switzerland, 2017; Volume 10586, pp. 817–827. [Google Scholar]
- Hyman, S.L.; Levy, S.E.; Myers, S.M.; Kuo, D.Z.; Apkon, S.; Davidson, L.F. Identification, evaluation, and management of children with autism spectrum disorder. Pediatrics 2020, 145, e20193447. [Google Scholar] [CrossRef] [PubMed]
- Thabtah, F.; Kamalov, F.; Rajab, K. A new computational intelligence approach to detect autistic features for autism screening. Int. J. Med. Inform. 2018, 117, 112–124. [Google Scholar] [CrossRef] [PubMed]
- Kohli, M.; Kar, A.K.; Sinha, S. The Role of Intelligent Technologies in Early Detection of Autism Spectrum Disorder (ASD): A Scoping Review. IEEE Access 2022, 10, 104887–104913. [Google Scholar] [CrossRef]
- Song, D.-Y.; Kim, S.Y.; Bong, G.; Kim, J.M.; Yoo, H.J. The Use of Artificial Intelligence in Screening and Diagnosis of Autism Spectrum Disorder: A Literature Review. J. Korean Acad. Child Adolesc. Psychiatry 2019, 30, 145–152. [Google Scholar] [CrossRef] [PubMed]
- de Belen, R.A.J.; Bednarz, T.; Sowmya, A.; Del Favero, D. Computer vision in autism spectrum disorder research: A systematic review of published studies from 2009 to 2019. Transl. Psychiatry 2020, 10, 333. [Google Scholar] [CrossRef]
- Lanini, M.; Bondioli, M.; Narzisi, A.; Pelagatti, S.; Chessa, S. (Eds.) Sensorized toys to identify the early ‘red flags’ of autistic spectrum disorders in preschoolers. In Ambient Intelligence–Software and Applications–9th International Symposium on Ambient Intelligence; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Boccanfuso, L.; Barney, E.; Foster, C.; Ahn, Y.A.; Chawarska, K.; Scassellati, B.; Shic, F. (Eds.) Emotional robot to examine different play patterns and affective responses of children with and without ASD. In Proceedings of the 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Christchurch, New Zealand, 7–10 March 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 19–26. [Google Scholar]
- Li, B.; Boccanfuso, L.; Wang, Q.; Barney, E.; Ahn, Y.A.; Foster, C. (Eds.) Human robot activity classification based on accelerometer and gyroscope. In Proceedings of the 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), New York, NY, USA, 26–31 August 2016. [Google Scholar]
- Sánchez-García, A.B.; Galindo-Villardón, P.; Nieto-Librero, A.B.; Martín-Rodero, H.; Robins, D.L. Toddler Screening for Autism Spectrum Disorder: A Meta-Analysis of Diagnostic Accuracy. J. Autism Dev. Disord. 2019, 49, 1837–1852. [Google Scholar] [CrossRef] [PubMed]
- Rakić, M.; Cabezas, M.; Kushibar, K.; Oliver, A.; Lladó, X. Improving the detection of autism spectrum disorder by combining structural and functional MRI information. NeuroImage Clin. 2020, 25, 102181. [Google Scholar] [CrossRef] [PubMed]
- Kang, J.; Han, X.; Song, J.; Niu, Z.; Li, X. The identification of children with autism spectrum disorder by SVM approach on EEG and eye-tracking data. Comput. Biol. Med. 2020, 120, 103722. [Google Scholar] [CrossRef]
- Khozaei, A.; Moradi, H.; Hosseini, R.; Pouretemad, H.; Eskandari, B. Early screening of autism spectrum disorder using cry features. PLoS ONE 2020, 15, e0241690. [Google Scholar] [CrossRef]
- Coronato, A.; Pietro, G.D. (Eds.) Detection of motion disorders of patients with autism spectrum disorders. In Ambient Assisted Living and Home Care. IWAAL 2012. Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2012; Volume 7657. [Google Scholar] [CrossRef]
- Taban, R.; Parsa, A.; Moradi, H. Tip-Toe Walking Detection Using CPG Parameters from Skeleton Data Gathered by Kinect. In Proceedings of the Ubiquitous Computing and Ambient Intelligence: 11th International Conference (UCAmI 2017), Philadelphia, PA, USA, 7–10 November 2017; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Sapiro, G.; Hashemi, J.; Dawson, G. Computer vision and behavioral phenotyping: An autism case study. Curr. Opin. Biomed. Eng. 2019, 9, 14–20. [Google Scholar] [CrossRef]
- Campbell, K.; Carpenter, K.; Hashemi, J.; Espinosa, S.; Marsan, S.; Borg, J.S.; Chang, Z.; Qiu, Q.; Vermeer, S.; Adler, E.; et al. Computer vision analysis captures atypical attention in toddlers with autism. Autism 2019, 23, 619–628. [Google Scholar] [CrossRef]
- Harrop, C.; Green, J.; Hudry, K.; PACT Consortium. Play complexity and toy engagement in preschoolers with autism spectrum disorder: Do girls and boys differ? Autism 2017, 21, 37–50. [Google Scholar] [CrossRef] [PubMed]
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D. SciPy 1.0: Fundamental algorithms for scientific computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef] [PubMed]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O. Scikit-learn: Machine learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Autism Prevalence Higher, According to Data from 11 ADDM Communities. Available online: https://www.cdc.gov/media/releases/2023/p0323-autism.html (accessed on 23 April 2023).
- The 17 Goals. Available online: https://sdgs.un.org/goals (accessed on 23 April 2023).
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).






{kind=link}
{kind=link}