
Autonomous Vehicles for Enhancing Expressway Capacity: A Dynamic Perspective


Abstract
:1. Introduction
- A theoretical analysis model framework for MTF capacity was established. In contrast to previous research, which only considered simplified MTF, this study considered the heterogeneity of HDVs, AVs, and CAVs, especially considering that CAVs could not communicate with the vehicles in front and degenerated into AVs.
- From the perspective of saturated headways, we demonstrated that, as AV and CAV technologies progress, the existing road infrastructure would still have an extremely large RC. Furthermore, we investigated RC formulation comprising deterministic and random expressions, which theoretically proved the scale effects of AV and CAV penetration rates on road operation efficiency.
- A simulation framework was developed to calculate the capacity of a single lane under a variable MPR. Based on numerical analysis, the theoretical model was verified, and a ROW reallocation method was analyzed for capacity enhancement.
2. Problem Description
2.1. Fundamental Assumptions
- (1)
- Expressway segment without an on/off ramp: We considered the capacity of the freeway segment without considering ramps and off-ramps.
- (2)
- Traffic flow composition: Although there are two types of autonomous driving technologies, that is, AVs and CAVs, the micro behaviors of vehicles (including car following, lane changing, and CAV platooning) of different brands and technical levels (L1–L5) [38] are bound to be different. We simplified MTFs into three categories: HDVs, AVs, and CAVs. When a CAV follows an HDV or an AV, and there is no real-time interaction with the vehicle in front based on the internet-connected communication function, the CAVs degrade to AVs [14,24]. Section 2.2 provides details on those specific analyses.
- (3)
- Steady flow: For modeling traffic flow at the freeway segment, in this study, we assumed a fixed headway as an estimate of the mean headway for a given car-following scenario. This simplified the model analysis and solution process. To derive the macroscopic theoretical capacity formulation, the detailed effects of lane changes and dynamic CAV platooning processes at the microscopic level were not considered.
2.2. Vehicle-Following Analysis
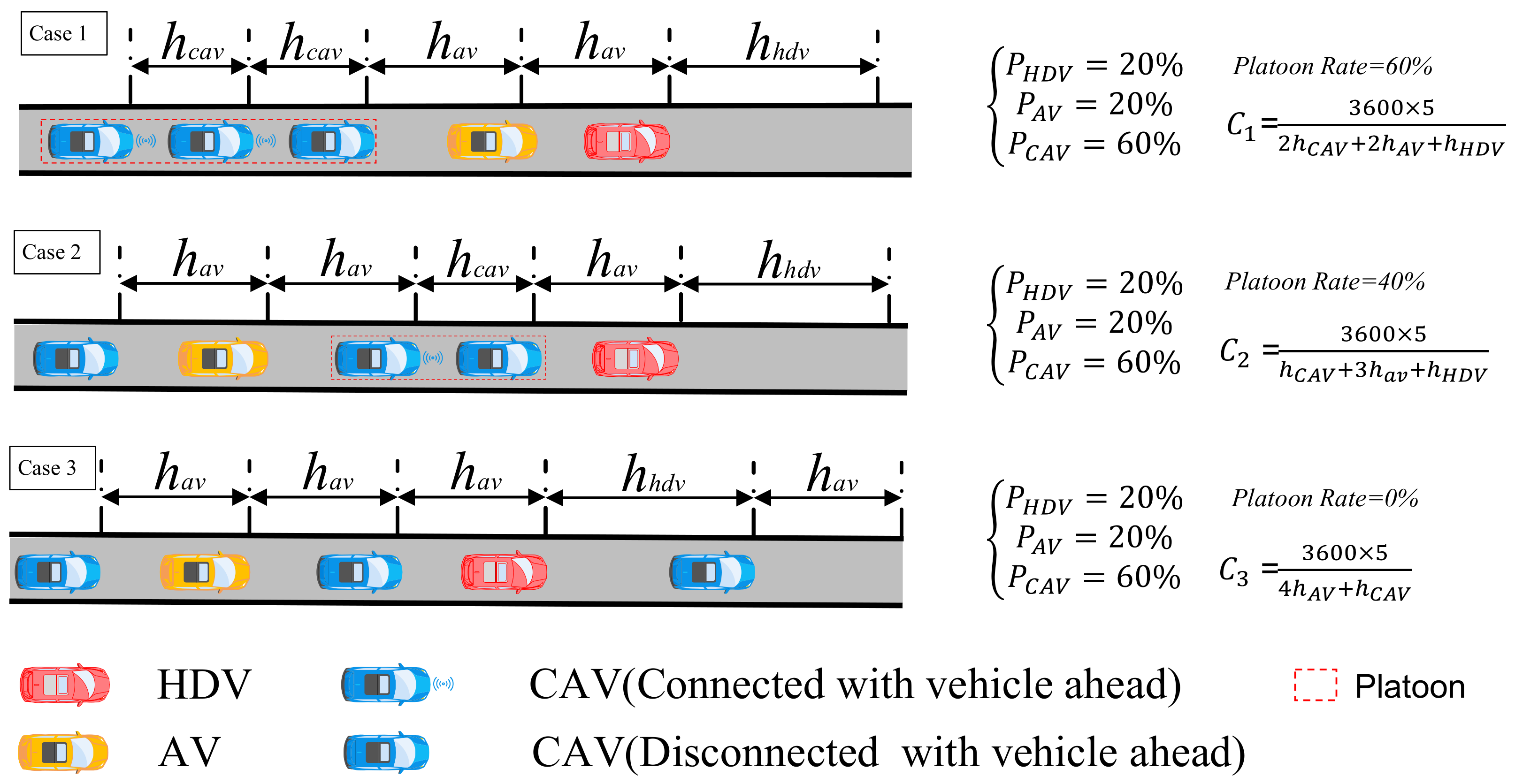
2.3. CAV Platooning
2.4. Capacity Assessment
2.4.1. Reserved Capacity
2.4.2. Monotonicity and Convexity of Capacity
3. Methodology
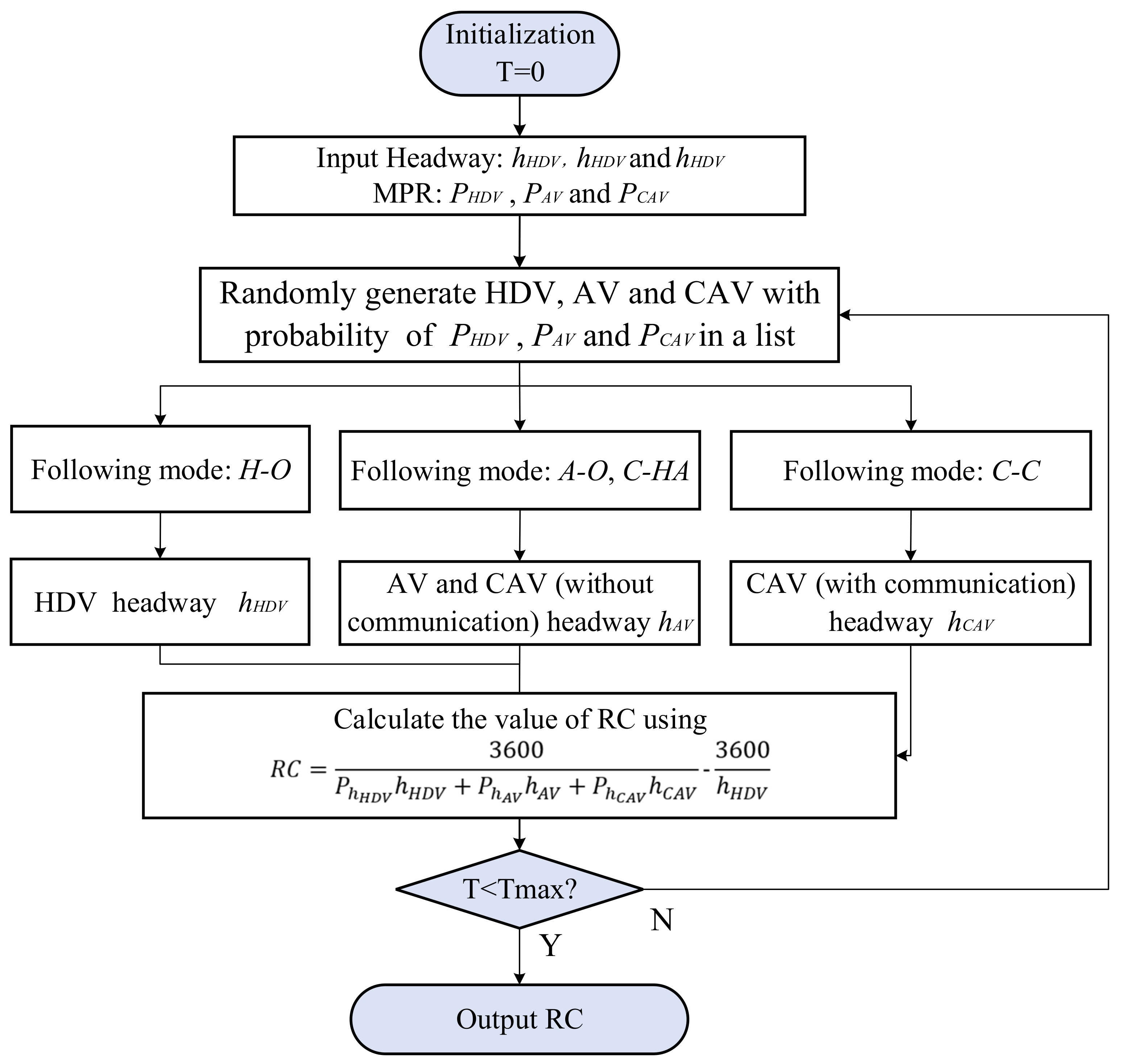
3.1. Monte Carlo Simulation Framework
3.2. Right-of-Way Allocation
4. Numerical Analyses
4.1. Market Penetration Rate
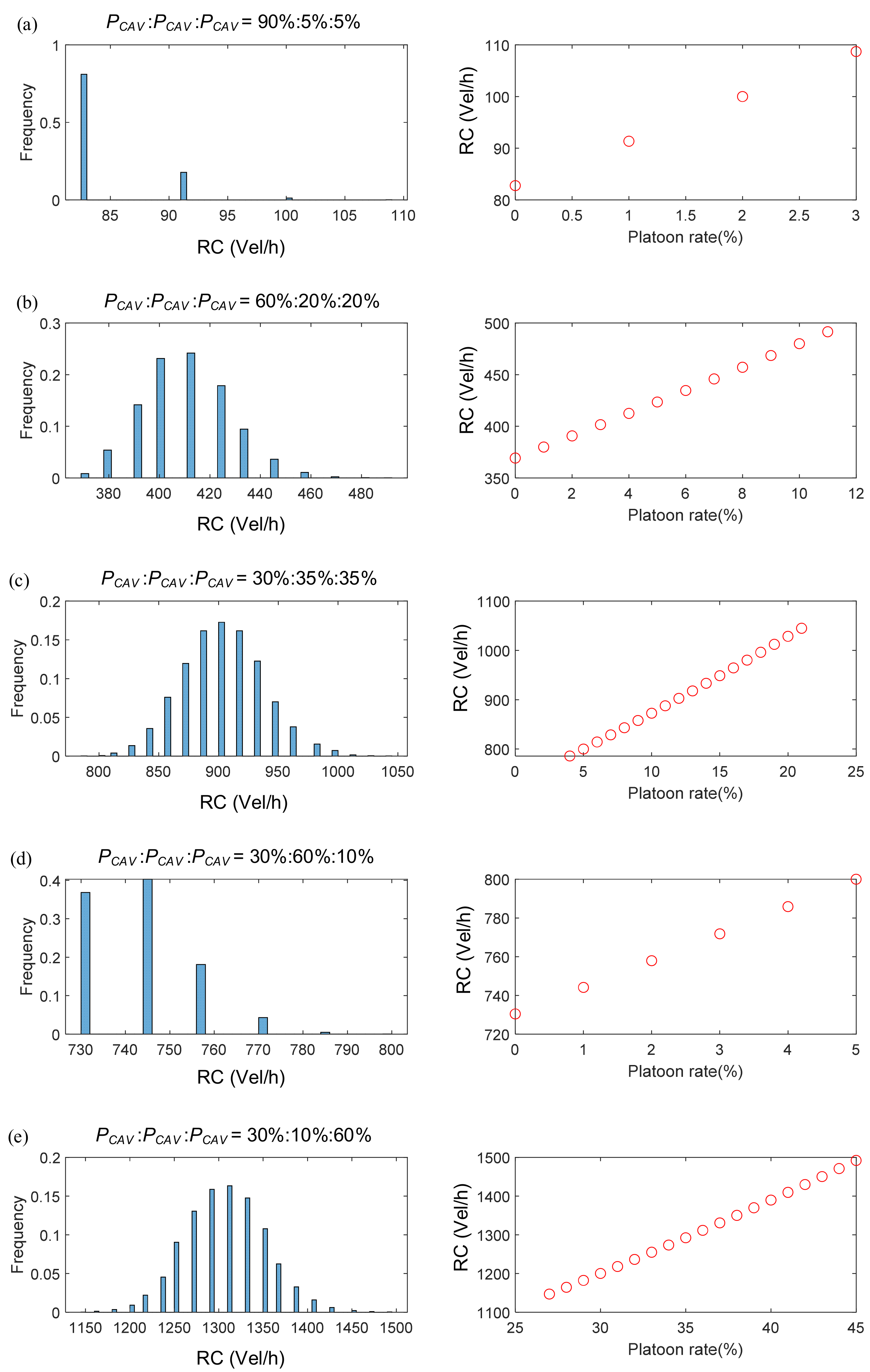
4.2. Platooning Rate
4.3. Right-of-Way Management
5. Conclusions and Future Studies
5.1. Conclusions
- (1)
- Owing to the improvement in the MPRs of AVs and CAVs in MTF, the capacity of the expressway system can be improved significantly. In an ideal scenario, where all CAVs operate at a 0.5 s headway, the maximum single-lane capacity of the expressway segment can reach 7200 pcu/h. However, the existing facilities still have a considerable RC under autonomous and connected vehicle scenarios.
- (2)
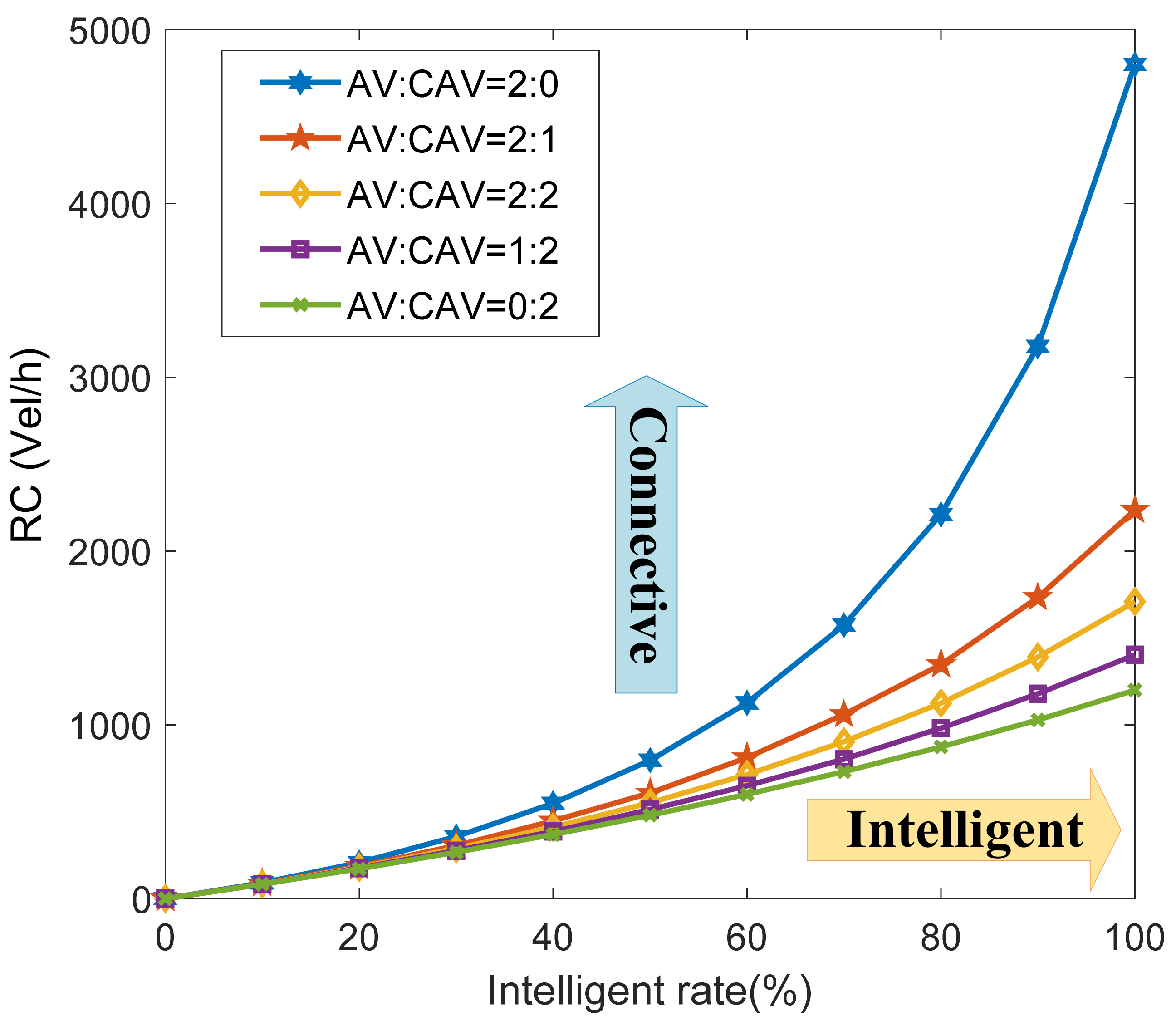
- In the future, traffic flow is expected to comprise HDVs, AVs, and CAVs simultaneously, and the capacity of mixture flow is expected to be quite complex (which can be affected by the MPRs of AVs and CAVs in MTF, saturation headway in multiple vehicle-following scenarios, and platooning rates of CAVs). Additionally, the capacity is convex to the MPRs of AVs and CAVs, which indicates that the growth in capacity is not linear (AVs and CAVs have a “scale effect” on capacity growth). In other words, the population of AVs and CAVs does not necessarily lead to a rapid increase in capacity when the MPR is >40%; therefore, the long-term operating efficiency of existing urban transportation facilities can be improved significantly.
- (3)
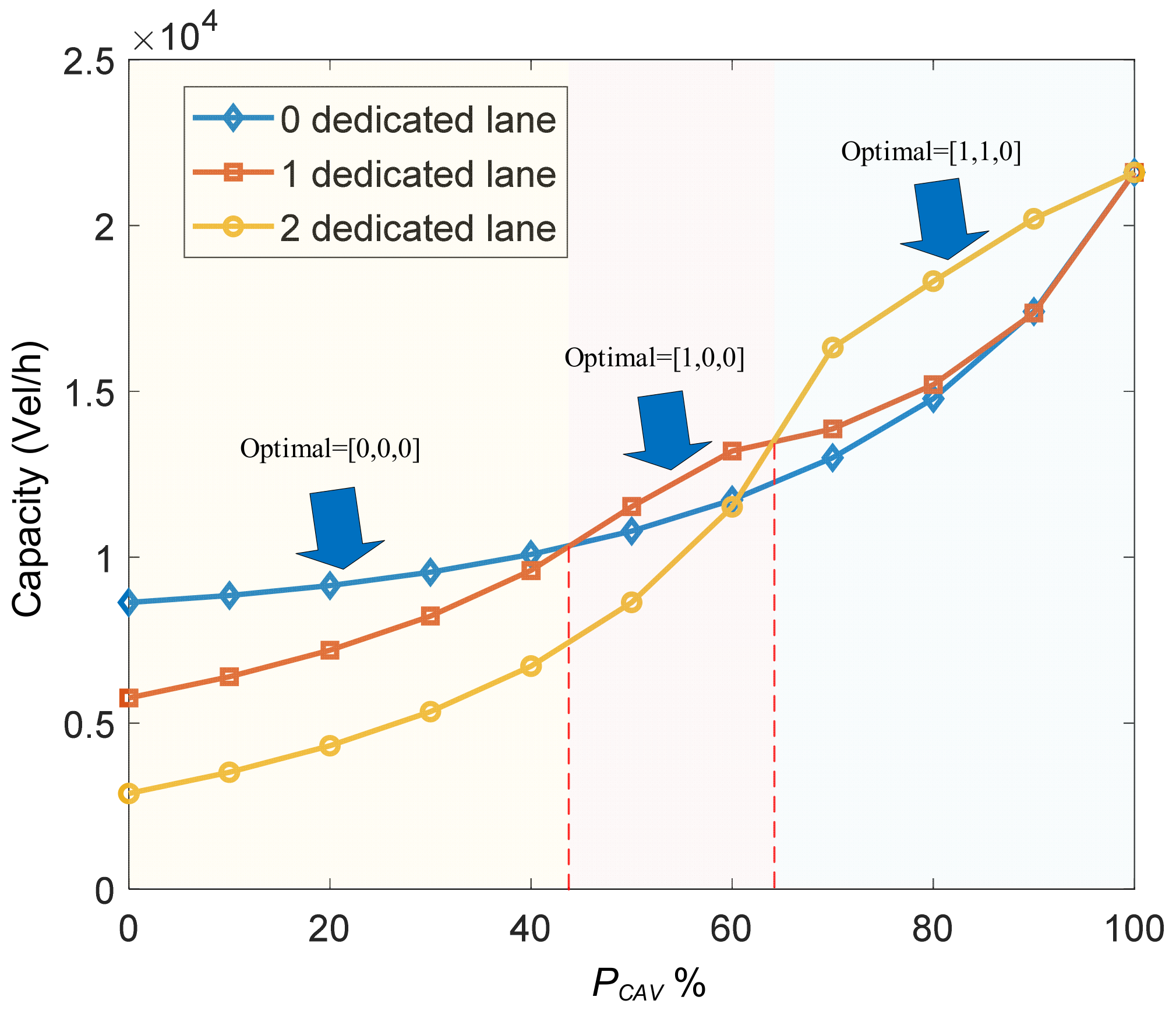
- In autonomous and connected vehicle environments, the ROW reallocation (the setting of dedicated lanes for CAVs) should be based on the MPR of CAVs, considering that it can improve the capacity of expressway segments. However, traffic flow should be sufficient enough to fulfill the dedicated lane to saturated (7200 pcu/h), rather than unsaturated levels.
5.2. Future Studies
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mitchell, J.D.; Claris, S.; Edge, D. Human-centered mobility: A new approach to designing and improving our urban transport infrastructure. Engineering 2016, 2, 33–36. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Yuan, Z.; Chen, J.; Guo, M. Assessment of osculating value method based on entropy weight to transportation energy conservation and emission reduction. Environ. Eng. Manag. J. 2017, 16, 2413–2423. [Google Scholar] [CrossRef]
- Kaewunruen, S.; Sresakoolchai, J.; Xiang, Y. Identification of weather influences on flight punctuality using machine learning approach. Climate 2021, 9, 127. [Google Scholar] [CrossRef]
- Wang, Y.; Geng, K.; May, A.D.; Zhou, H. The impact of traffic demand management policy mix on commuter travel choices. Transp. Policy 2022, 117, 74–87. [Google Scholar] [CrossRef]
- Ma, Z.; Koutsopoulos, H.N.; Liu, T.; Basu, A.A. Behavioral response to promotion-based public transport demand management: Longitudinal analysis and implications for optimal promotion design. Transp. Res. Part A Policy Pract. 2020, 141, 356–372. [Google Scholar] [CrossRef]
- Halvorsen, A.; Koutsopoulos, H.N.; Lau, S.; Au, T.; Zhao, J. Reducing subway crowding: Analysis of an off-peak discount experiment in Hong Kong. Transp. Res. Rec. J. Transp. Res. Board 2016, 2544, 38–46. [Google Scholar] [CrossRef] [Green Version]
- Zhao, C.; Wang, K.; Dong, X.; Dong, K. Is smart transportation associated with reduced carbon emissions? The case of China. Energy Econ. 2022, 105, 105715. [Google Scholar] [CrossRef]
- Li, C.; Ding, L.; Zhong, B. Highway planning and design in the Qinghai–Tibet Plateau of China: A cost–safety balance perspective. Engineering 2019, 5, 337–349. [Google Scholar] [CrossRef]
- Liu, M.; Zhao, J.; Hoogendoorn, S.P.; Wang, M. An optimal control approach of integrating traffic signals and cooperative vehicle trajectories at intersections. Transp. B Transp. Dyn. 2021, 1–17. [Google Scholar] [CrossRef]
- Decker, C.; Chiambaretto, P. Economic policy choices and trade-offs for Unmanned aircraft systems Traffic Management (UTM): Insights from Europe and the United States. Transp. Res. Part A Policy Pract. 2022, 157, 40–58. [Google Scholar] [CrossRef]
- Kaewunruen, S.; Alawad, H.; Omura, T.; Saito, M. Machine learning-aided management of motorway facilities using single-vehicle accident data. SAE Int. J. Transp. Saf. 2021, 9, 205–232. [Google Scholar]
- Omura, T.; Kaewunruen, S. Viaduct maintenance for future traffic demands and earthquakes. Infrastruct. Asset Manag. 2020, 7, 256–268. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Rad, S.R.; Farah, H.; Taale, H.; van Arem, H.; Hoogendoorn, S.P. Design and operation of dedicated lanes for connected and automated vehicles on motorways: A conceptual framework and research agenda. Transp. Res. Part C Emerg. Technol. 2020, 117, 102664. [Google Scholar]
- Shi, X.; Li, X. Empirical study on car-following characteristics of commercial automated vehicles with different headway settings. Transp. Res. Part C Emerg. Technol. 2021, 128, 103134. [Google Scholar] [CrossRef]
- Grabbe, N.; Kellnberger, A.; Aydin, B.; Bengler, K. Safety of automated driving: The need for a systems approach and application of the functional resonance analysis method. Saf. Sci. 2020, 126, 104665. [Google Scholar] [CrossRef]
- Yang, Y.; Yuan, Z.; Meng, R. Exploring traffic crash occurrence mechanism towards cross-area freeways via an improved data mining approach. J. Transp. Eng. Part A Syst. 2022. [Google Scholar] [CrossRef]
- Yang, Y.; He, K.; Wang, Y.; Yuan, Z.; Yin, Y.; Guo, M. Identification of dynamic traffic crash risk for cross-area freeways based on statistical and machine learning methods. Phys. A Stat. Mech. Its Appl. 2022, 595, 127083. [Google Scholar] [CrossRef]
- Liu, R.; Stefanovich, A.; Kaewunruen, S. Sensitivity of a highspeed rail development on supply chain and logistics via air-rail-road freight transportation. Front. Built Environ. 2021, 7, 685884. [Google Scholar] [CrossRef]
- Mahmassani, H.S. 50th anniversary invited article—Autonomous vehicles and connected vehicle systems: Flow and operations considerations. Transp. Sci. 2016, 50, 1140–1162. [Google Scholar] [CrossRef]
- Olia, A.; Razavi, S.; Abdulhai, B.; Abdelgawad, H. Traffic capacity implications of automated vehicles mixed with regular vehicles. J. Intell. Transp. Syst. 2018, 22, 244–262. [Google Scholar] [CrossRef]
- Ghiasi, A.; Li, X.; Ma, J. A mixed traffic speed harmonization model with connected autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2019, 104, 210–233. [Google Scholar] [CrossRef]
- Wang, C.; Xie, Y.; Huang, H.; Liu, P. A review of surrogate safety measures and their applications in connected and automated vehicles safety modeling. Accid. Anal. Prev. 2021, 157, 106157. [Google Scholar] [CrossRef] [PubMed]
- Ghiasi, A.; Hussain, O.; Qian, Z.S.; Li, X. A mixed traffic capacity analysis and lane management model for connected automated vehicles: A Markov chain method. Transp. Res. Part B Methodol. 2017, 106, 266–292. [Google Scholar] [CrossRef]
- Highway Capacity Manual: A Guide for Multimodal Mobility Analysis, 6th ed.; The National Academies Press: Washington, DC, USA, 2016.
- Chen, Z.; He, F.; Yin, Y.; Du, Y. Optimal design of autonomous vehicle zones in transportation networks. Transp. Res. Part B Methodol. 2017, 99, 44–61. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Lu, L.; Peets, S.; He, Z. Optimal toll design problems under mixed traffic flow of human-driven vehicles and connected and autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2021, 125, 102952. [Google Scholar] [CrossRef]
- Bahrami, S.; Roorda, M.J. Optimal traffic management policies for mixed human and automated traffic flows. Transp. Res. Part A Policy Pract. 2020, 135, 130–143. [Google Scholar] [CrossRef]
- Lazar, D.A.; Biyik, E.; Sadigh, D.; Pedarsani, R. Learning how to dynamically route autonomous vehicles on shared roads. Transp. Res. Part C Emerg. Technol. 2021, 130, 103258. [Google Scholar] [CrossRef]
- Chen, D.; Ahn, S.; Chitturi, M.; Noyce, D.A. Towards vehicle automation: Roadway capacity formulation for traffic mixed with regular and automated vehicles. Transp. Res. Part B Methodol. 2017, 100, 196–221. [Google Scholar] [CrossRef] [Green Version]
- Van den Berg, V.A.; Verhoef, E.T. Autonomous cars and dynamic bottleneck congestion: The effects on capacity, value of time and preference heterogeneity. Transp. Res. Part B Methodol. 2016, 94, 43–60. [Google Scholar] [CrossRef]
- Sala, M.; Soriguera, F. Capacity of a freeway lane with platoons of autonomous vehicles mixed with regular traffic. Transp. Res. Part B Methodol. 2021, 147, 116–131. [Google Scholar] [CrossRef]
- Zhao, L.; Sun, J. Simulation framework for vehicle platooning and car-following behaviors under connected-vehicle environment. Procedia Soc. Behav. Sci. 2013, 96, 914–924. [Google Scholar] [CrossRef] [Green Version]
- Schoenmakers, M.; Yang, D.; Farah, H. Car-following behavioural adaptation when driving next to automated vehicles on a dedicated lane on motorways: A driving simulator study in the Netherlands. Transp. Res. Part F Psychol. Behav. 2021, 78, 119–129. [Google Scholar] [CrossRef]
- Milanés, V.; Shladover, S.E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data. Transp. Res. Part C Emerg. Technol. 2014, 48, 285–300. [Google Scholar] [CrossRef] [Green Version]
- Zhong, Z.; Lee, J.; Zhao, L. Traffic flow characteristics and lane use strategies for connected and automated vehicles in mixed traffic conditions. J. Adv. Transp. 2021, 2021, 8816540. [Google Scholar] [CrossRef]
- Li, T.; Guo, F.; Krishnan, R.; Sivakumar, A.; Polak, J. Right-of-way reallocation for mixed flow of autonomous vehicles and human driven vehicles. Transp. Res. Part C Emerg. Technol. 2020, 115, 102630. [Google Scholar] [CrossRef]
- SAE International. Taxonomy and Definitions for Terms Related to Driving Automation Systems for on-Road Motor Vehicles; (J3016); SAE International: Warrendale, PA, USA, 2016. [Google Scholar]
- Neubert, L.; Santen, L.; Schadschneider, A.; Schreckenberg, M. Single-vehicle data of highway traffic: A statistical analysis. Phys. Rev. E 1999, 60, 6480–6490. [Google Scholar] [CrossRef] [Green Version]
- Fancher, P.; Bareket, Z.; Ervin, R. Human-centered design of an acc-with-braking and forward-crash-warning system. Veh. Syst. Dyn. 2003, 36, 203–223. [Google Scholar] [CrossRef]
- Liu, H.; Kan, X.; Shladover, S.E.; Lu, X.-Y.; Ferlis, R.E. Modeling impacts of Cooperative Adaptive Cruise Control on mixed traffic flow in multi-lane freeway facilities. Transp. Res. Part C Emerg. Technol. 2018, 95, 261–279. [Google Scholar] [CrossRef]
- Bose, A.; Ioannou, P.A. Analysis of traffic flow with mixed manual and semiautomated vehicles. IEEE Trans. Intell. Transp. Syst. 2003, 4, 173–188. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Chen, X.; Ouyang, Y.; Li, M. Emission mitigation via longitudinal control of intelligent vehicles in a congested platoon. Comput.-Aided Civ. Infrastruct. Eng. 2015, 30, 490–506. [Google Scholar] [CrossRef]
- Xiao, L.; Wang, M.; Schakel, W.; van Arem, B. Unravelling effects of cooperative adaptive cruise control deactivation on traffic flow characteristics at merging bottlenecks. Transp. Res. Part C Emerg. Technol. 2018, 96, 380–397. [Google Scholar] [CrossRef]
- Rahman, M.S.; Abdel-Aty, M. Longitudinal safety evaluation of connected vehicles’ platooning on expressways. Accid. Anal. Prev. 2018, 117, 381–391. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Description |
|---|---|
| HDV(s) | Human-driven vehicle(s) |
| AV(s) | Autonomous vehicle(s) |
| CAV(s) | Connective-and-autonomous vehicle(s) |
| RC | Reserved capacity |
| Penetration rate of HDVs in MTF | |
| Penetration rate of AVs in MTF | |
| Penetration rate of CAVs in MTF | |
| Probability headway of occurring | |
| Probability headway of occurring | |
| Probability headway of occurring | |
| Average critical headway per cycle | |
| Capacity with only HDVs | |
| Capacity of MTF | |
| Reserved capacity |
| Lane Number | 1 | 2 | 3 | 1 | 2 | 3 | 1 | 2 | 3 |
|---|---|---|---|---|---|---|---|---|---|
| No | No | No | Yes | No | No | Yes | Yes | No | |
| (50:50:0) | 2880 | 2880 | 2880 | 0 | 2880 | 2880 | 0 | 0 | 2880 |
| (45:45:10) | 2949.5 | 2949.5 | 2949.5 | 640 | 2880 | 2880 | 320 | 320 | 2880 |
| (40:40:20) | 3049 | 3049 | 3049 | 1440 | 2880 | 2880 | 720 | 720 | 2880 |
| (35:35:30) | 3183.2 | 3183.2 | 3183.2 | 2469 | 2880 | 2880 | 1234 | 1234 | 2880 |
| (30:30:40) | 3361 | 3361 | 3361 | 3840 | 2880 | 2880 | 1920 | 1920 | 2880 |
| (25:25:50) | 3596.4 | 3596.4 | 3596.4 | 5768 | 2880 | 2880 | 2880 | 2880 | 2880 |
| (20:20:60) | 3908.6 | 3908.6 | 3908.6 | 7200 | 3000 | 3000 | 4320 | 4320 | 2880 |
| (15:15:70) | 4332.3 | 4332.3 | 4332.3 | 7200 | 3333 | 3333 | 6720 | 6720 | 2880 |
| (10:10:80) | 4926.6 | 4926.6 | 4926.6 | 7200 | 4000 | 4000 | 7200 | 7200 | 3920 |
| (5:5:90) | 5802 | 5802 | 5802 | 7200 | 5080 | 5080 | 7200 | 7200 | 5800 |
| (0:0:100) | 7200 | 7200 | 7200 | 7200 | 7200 | 7200 | 7200 | 7200 | 7200 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.-J.; Wang, F.-K.; Wang, Z.-Z.; Wang, T.; Jiang, Z.-H. Autonomous Vehicles for Enhancing Expressway Capacity: A Dynamic Perspective. Sustainability 2022, 14, 5193. https://doi.org/10.3390/su14095193
Liu C-J, Wang F-K, Wang Z-Z, Wang T, Jiang Z-H. Autonomous Vehicles for Enhancing Expressway Capacity: A Dynamic Perspective. Sustainability. 2022; 14(9):5193. https://doi.org/10.3390/su14095193
Chicago/Turabian StyleLiu, Cong-Jian, Fang-Kai Wang, Zhuang-Zhuang Wang, Tao Wang, and Ze-Hao Jiang. 2022. "Autonomous Vehicles for Enhancing Expressway Capacity: A Dynamic Perspective" Sustainability 14, no. 9: 5193. https://doi.org/10.3390/su14095193
APA StyleLiu, C.-J., Wang, F.-K., Wang, Z.-Z., Wang, T., & Jiang, Z.-H. (2022). Autonomous Vehicles for Enhancing Expressway Capacity: A Dynamic Perspective. Sustainability, 14(9), 5193. https://doi.org/10.3390/su14095193