
Optimal Planning of Remote Microgrids with Multi-Size Split-Diesel Generators





Abstract
:1. Introduction
1.1. Background and Motivation
1.2. Literature Review
1.3. Contributions
- Optimal sizing of Split-DG/FT/PV/WT/BES for a remote microgrid based on a multi-size Split-DG.
- Development of a practical and precise model based on capacity degradation of PV and BES, spinning reserve for the remote microgrid, as well as DG’s and fuel tank’s constraint.
- Development of a variable weighting particle swarm optimization algorithm for optimal sizing of remote microgrids.
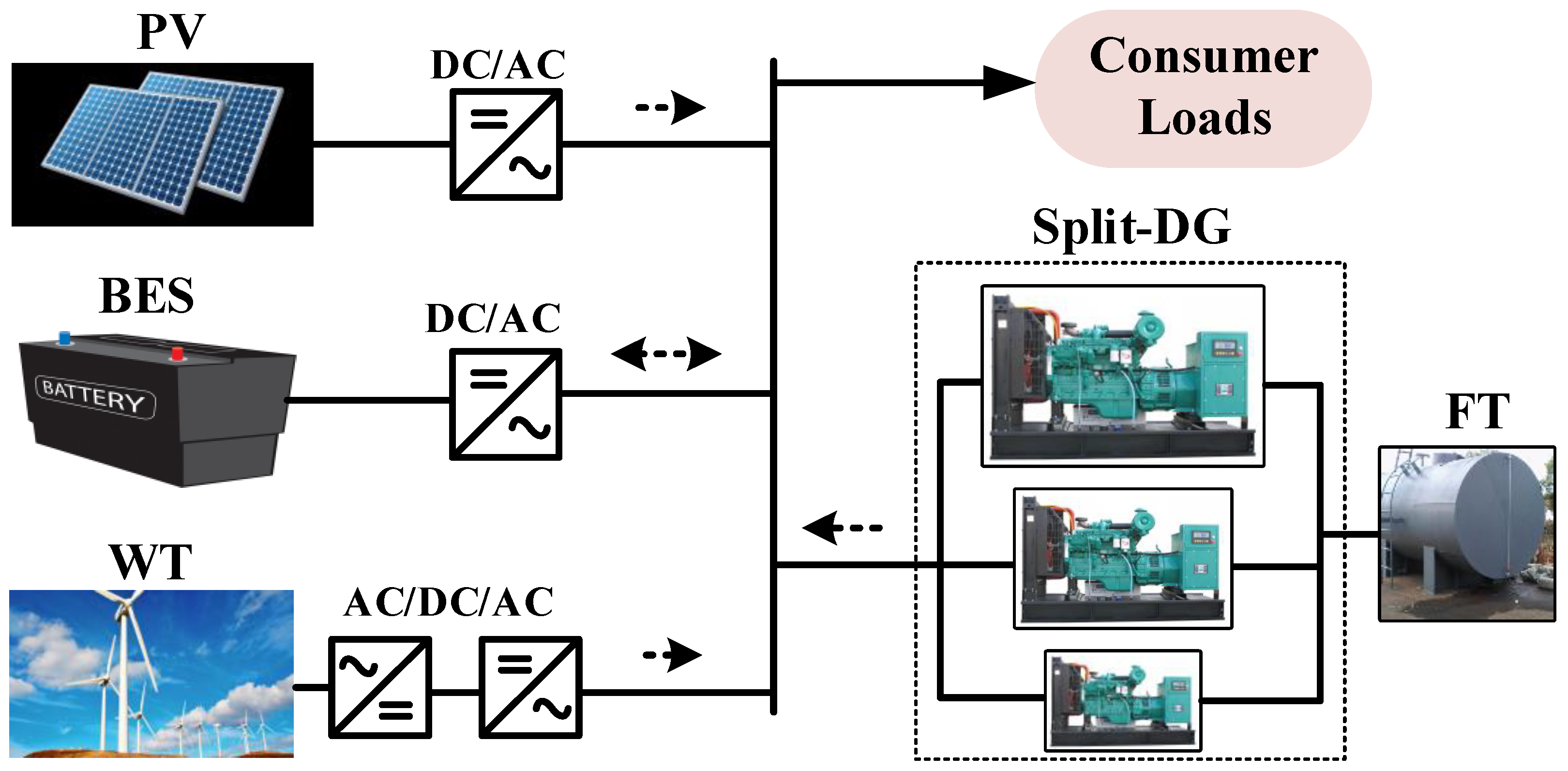
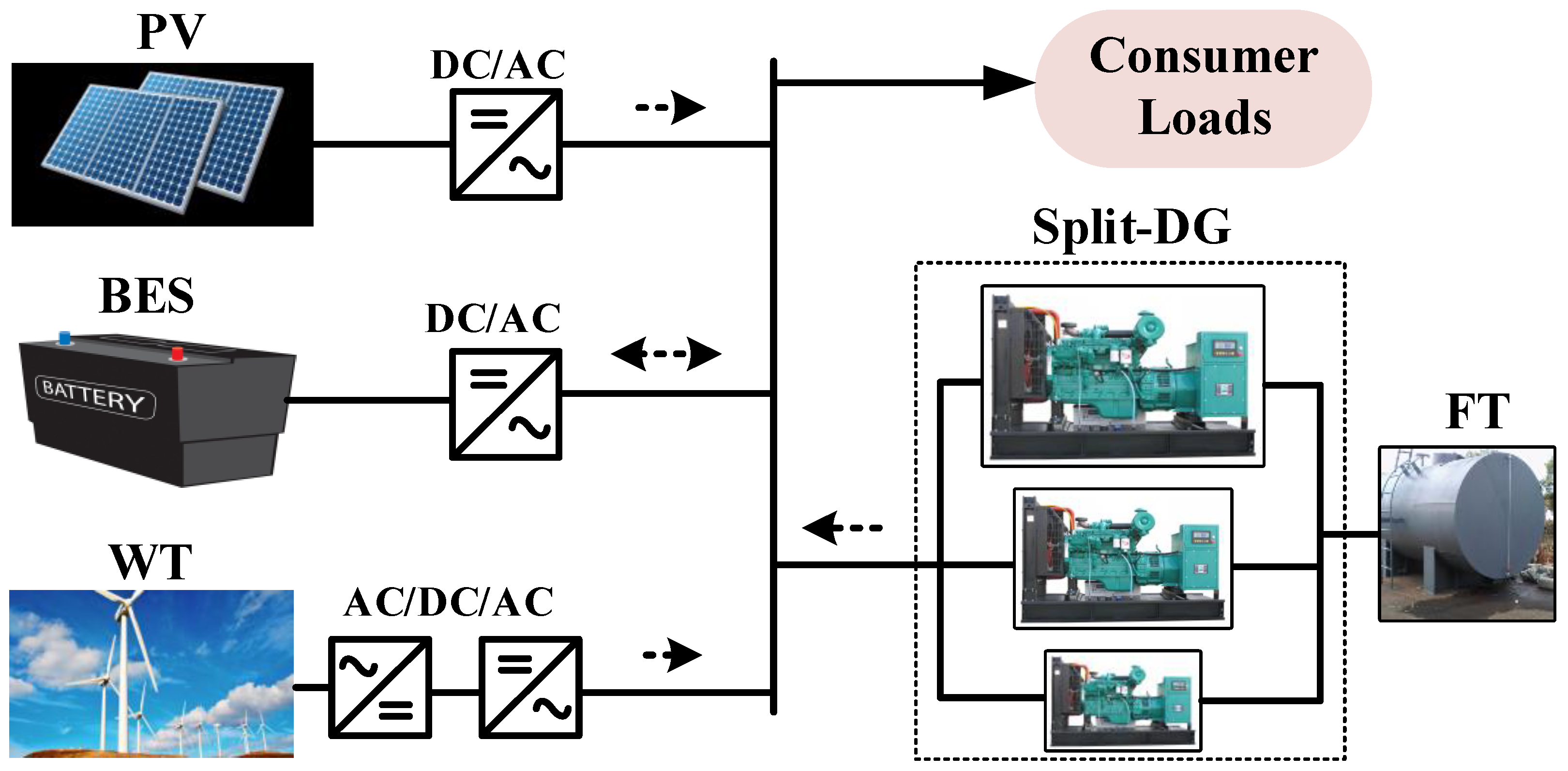
2. System Model
2.1. Model of Components
2.1.1. Photovoltaic System
2.1.2. Wind Turbine
2.1.3. Battery Energy Storage
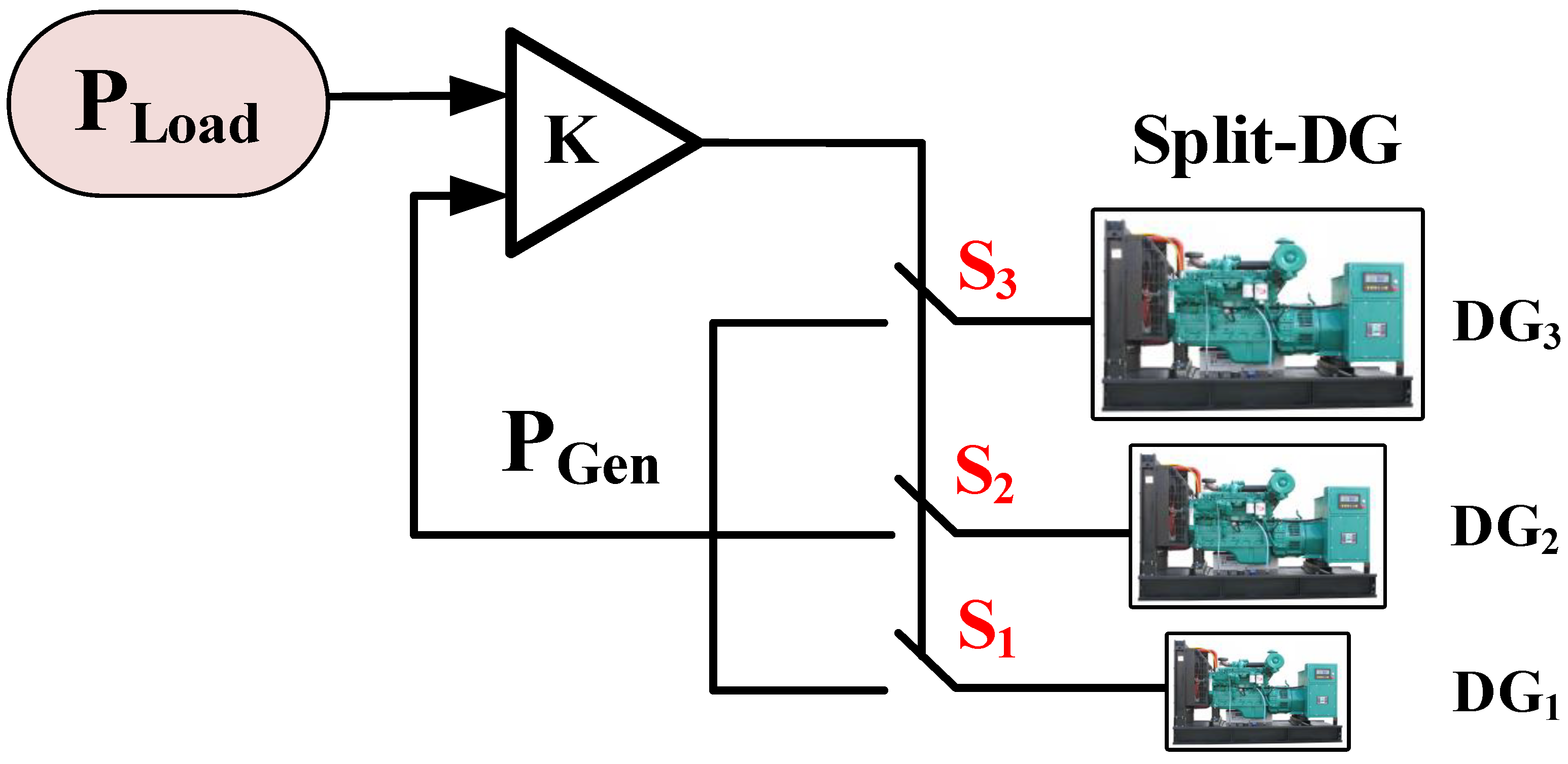
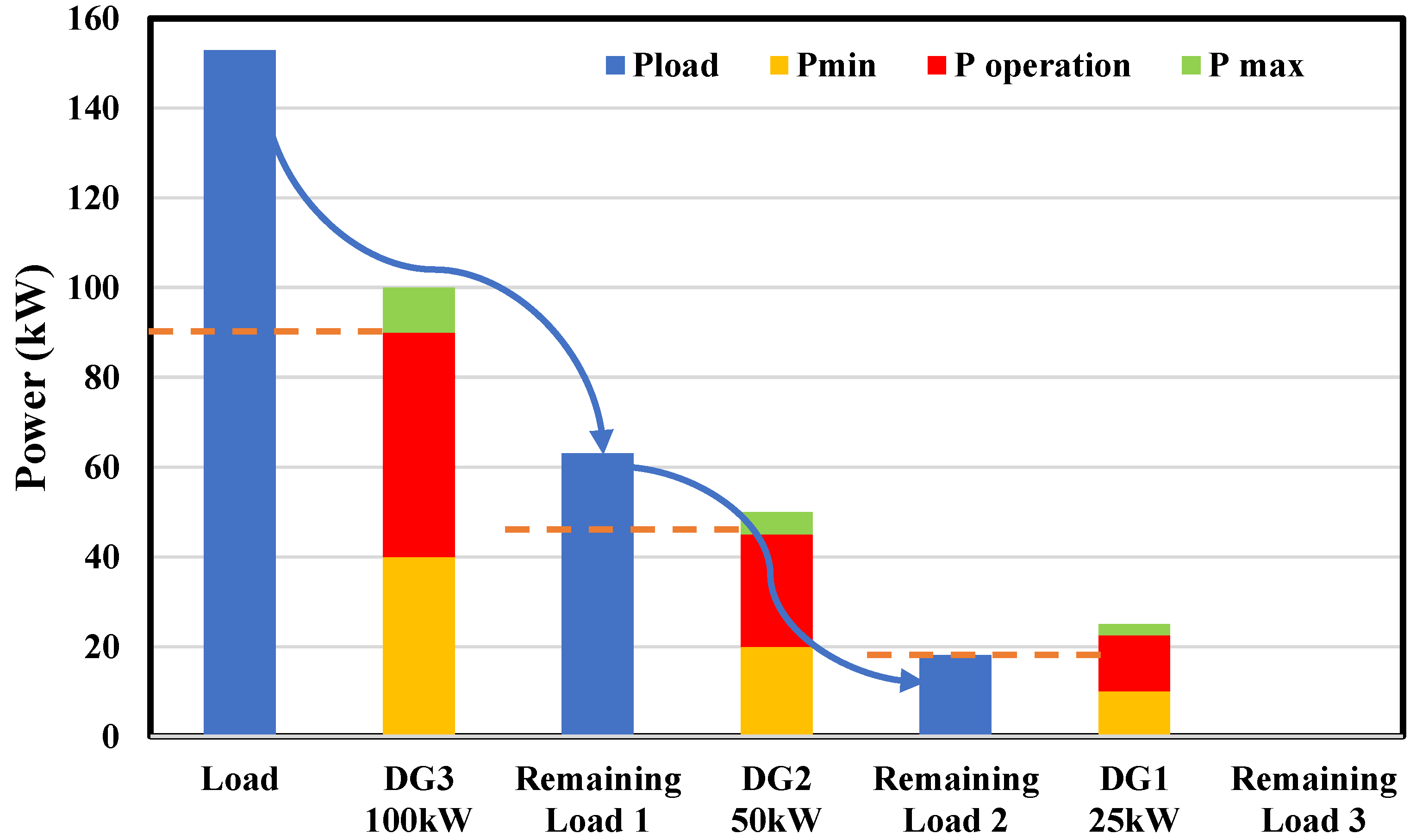
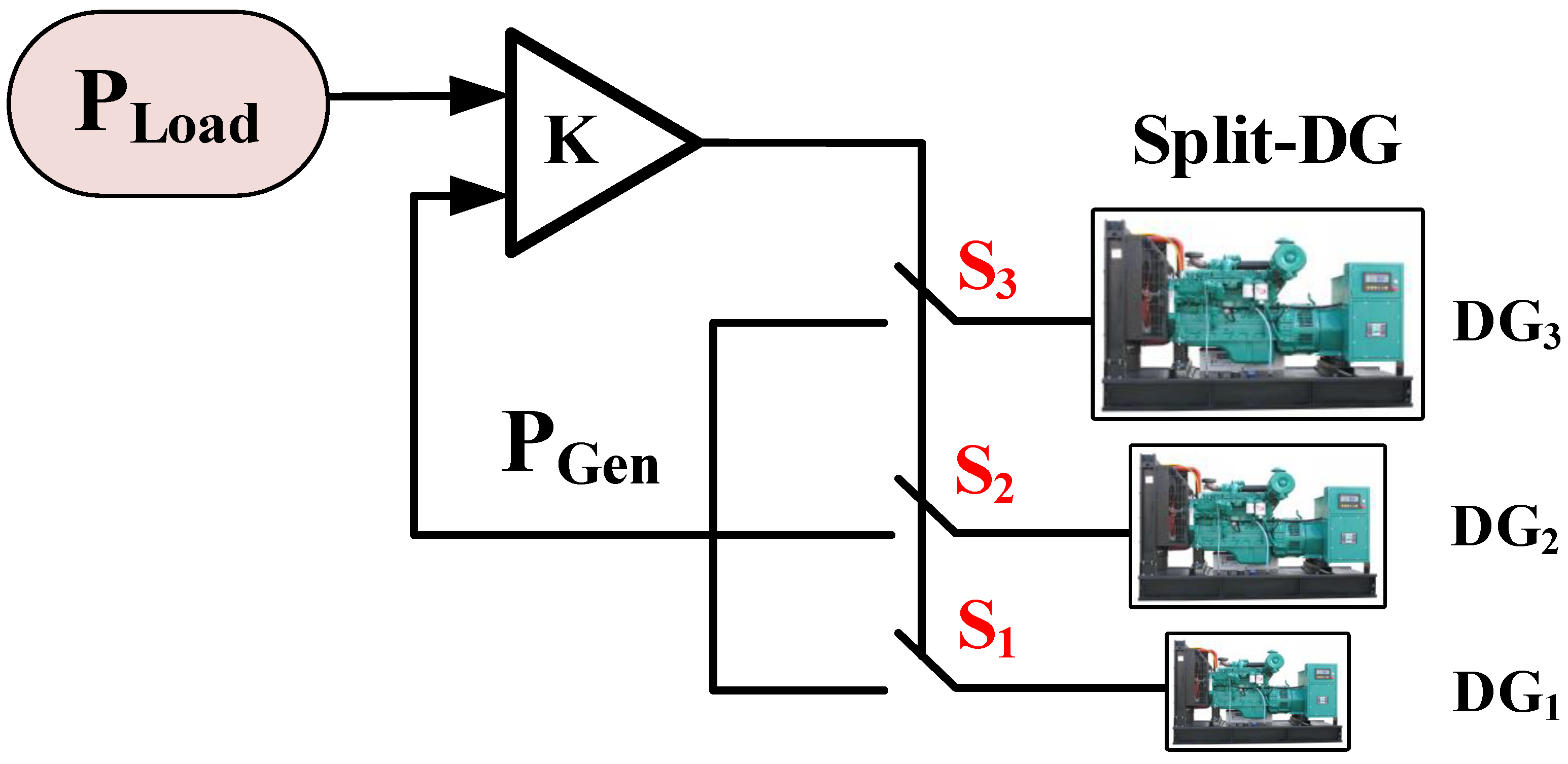
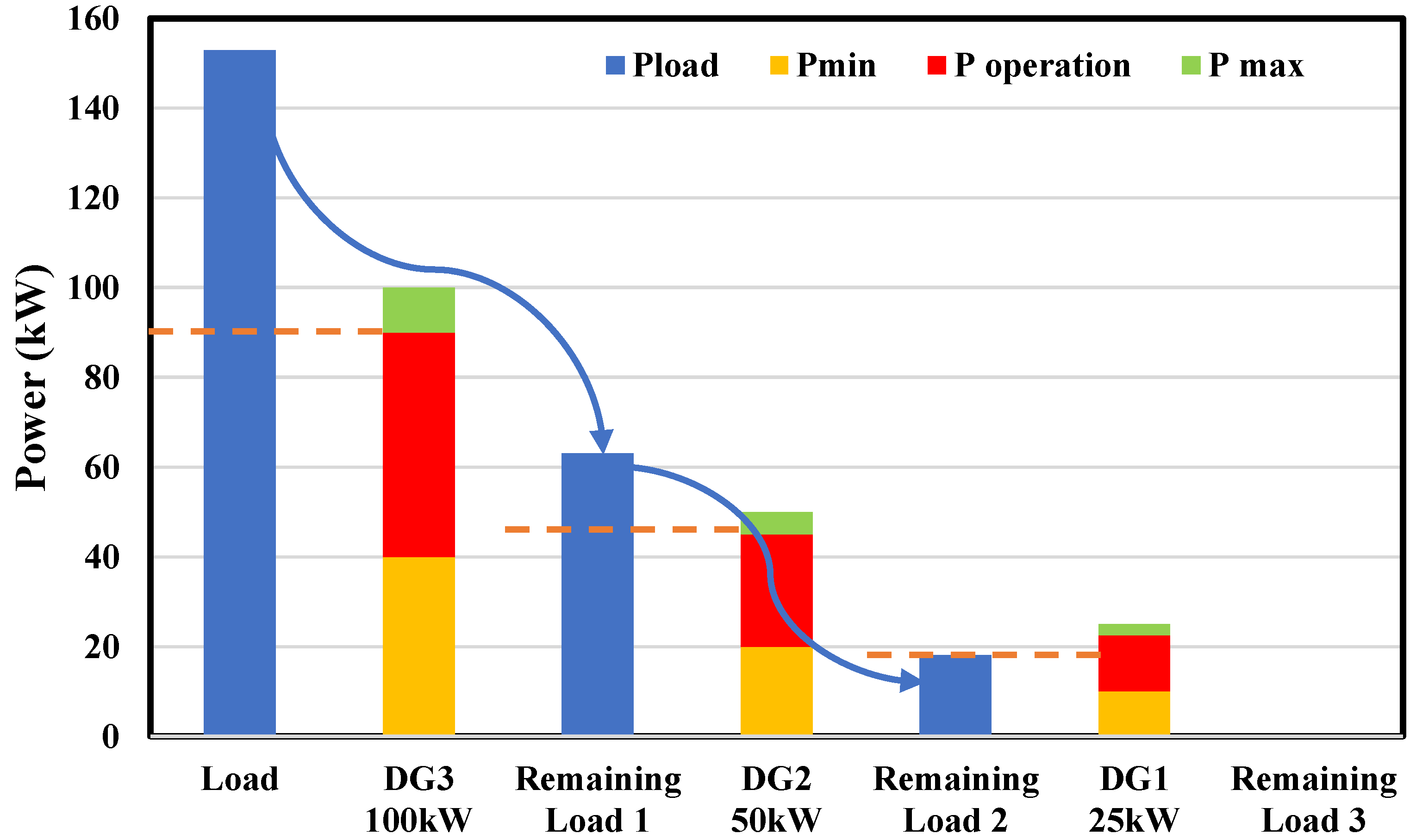
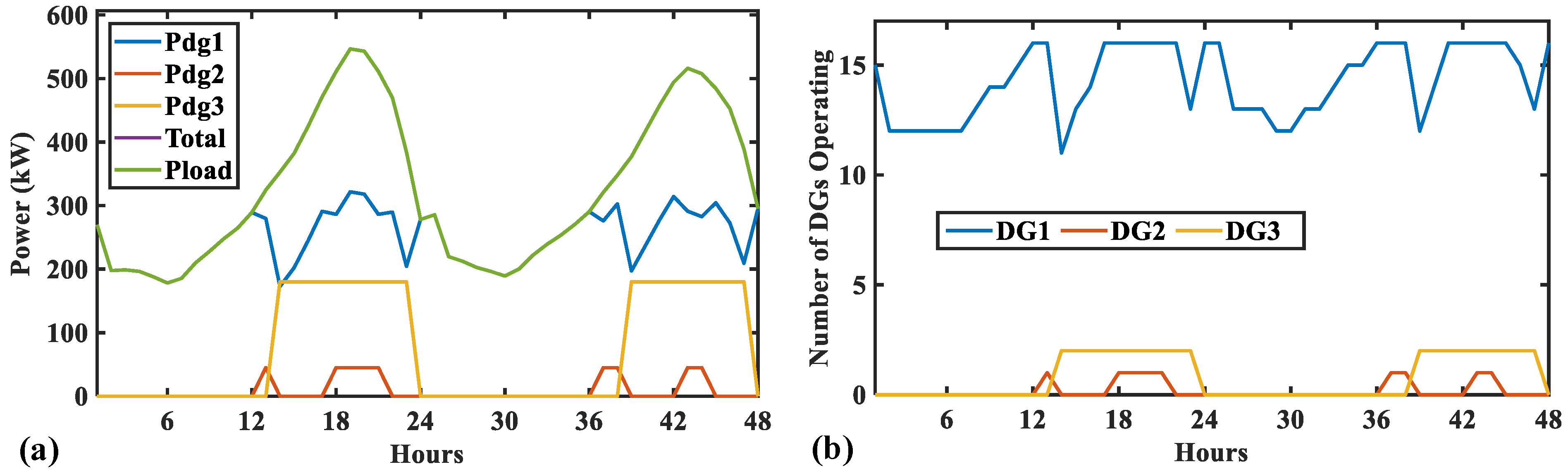
2.1.4. Split-Diesel Generators
2.1.5. Fuel Tanks (FT)
2.2. Dumped Power
2.3. Spinning Reserve
2.4. CO2 Emission
3. Optimization Model
- All components must operate inside their upper and lower boundaries. These boundaries have been specified in previous sections.
- Load requirement must always be supplied at each time interval.
- SOC at the end of the analyzed year cannot be less than the initial SOC. The initial SOC at the beginning of the project is predefined as 70%.
- There must always be a minimum spinning reserve of 100 kW after the load demand is supplied. This is due to the N-1 reliability index, which should consider the power rate of the largest generation unit of the system. Hence, the SR can be calculated as follows:
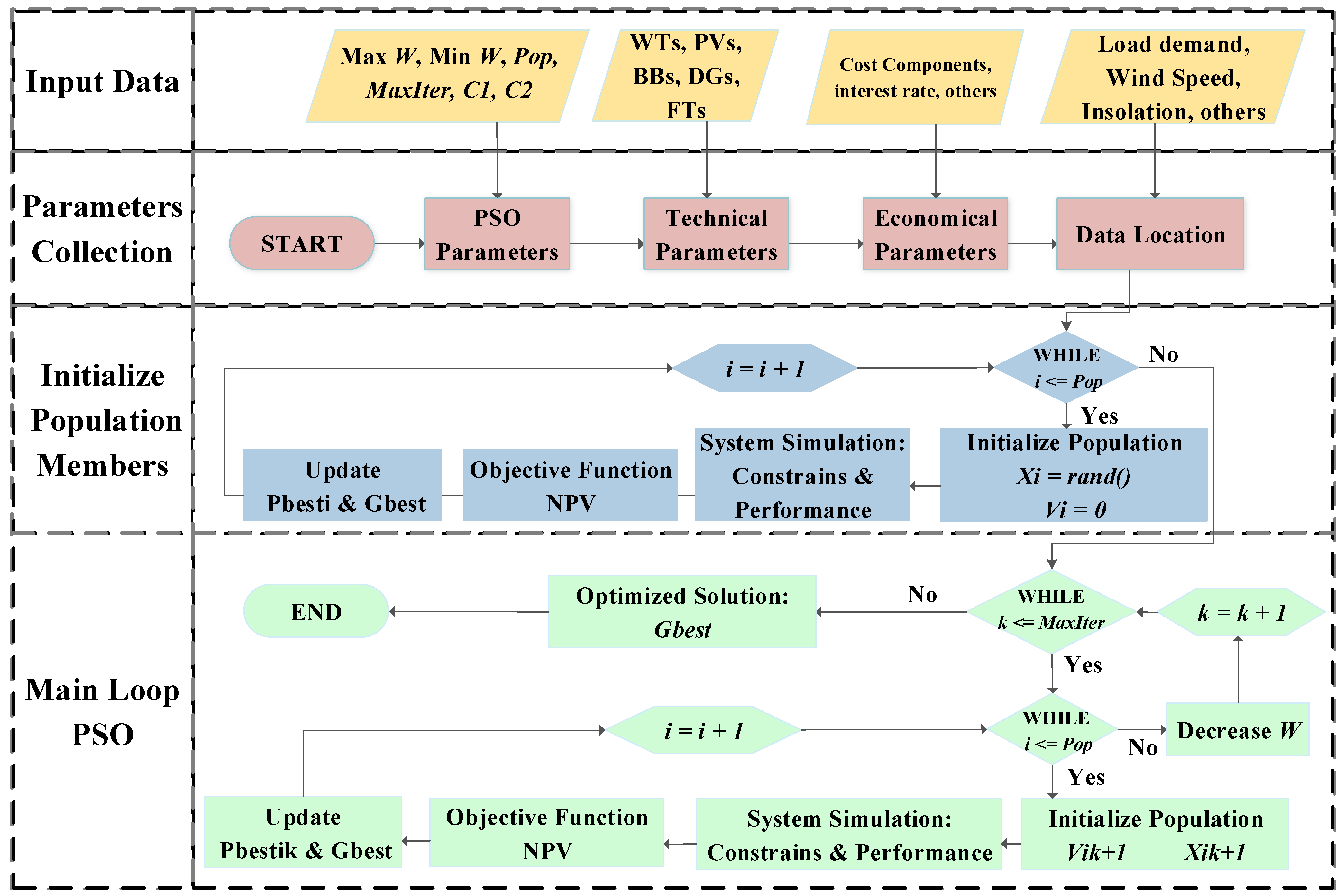
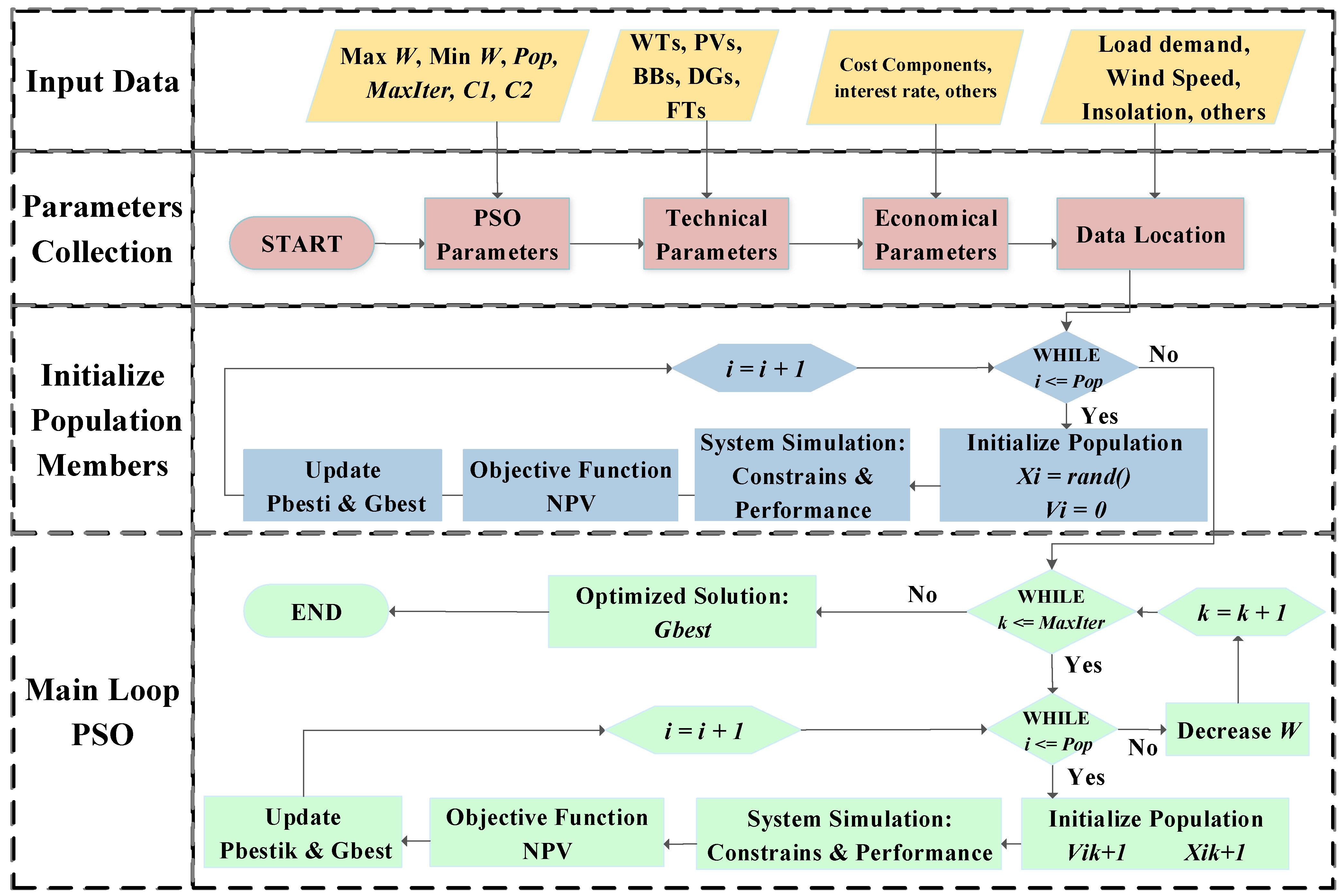
4. Optimization Algorithm
5. System Configurations and Input Data
5.1. Configuration 1
5.2. Configuration 2
5.3. Configuration 3
5.4. System Input Data
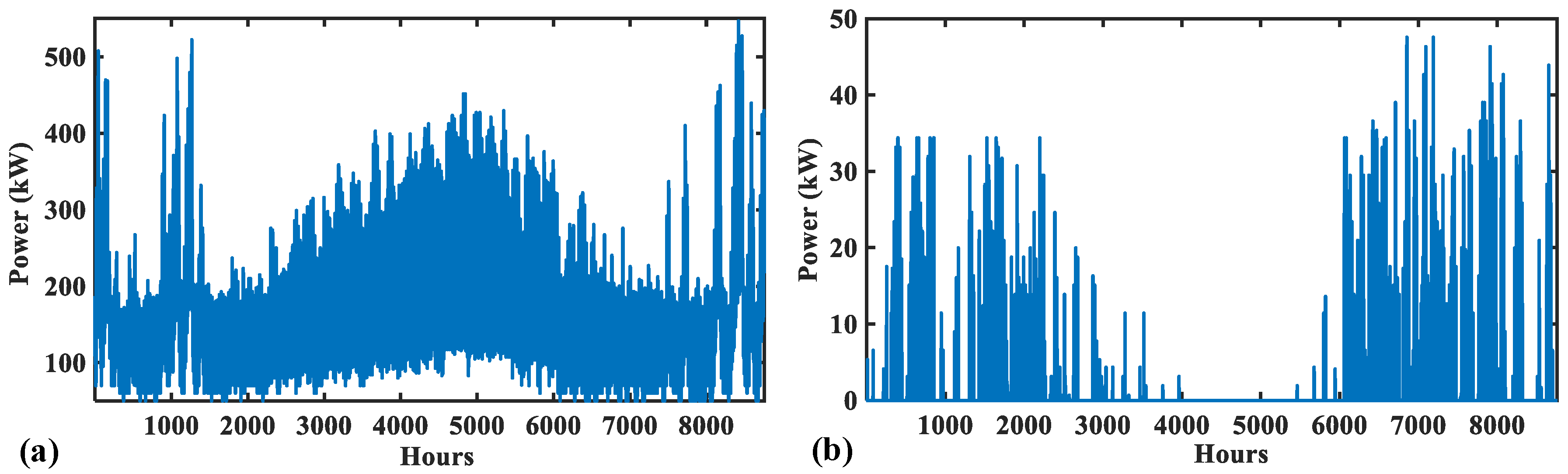
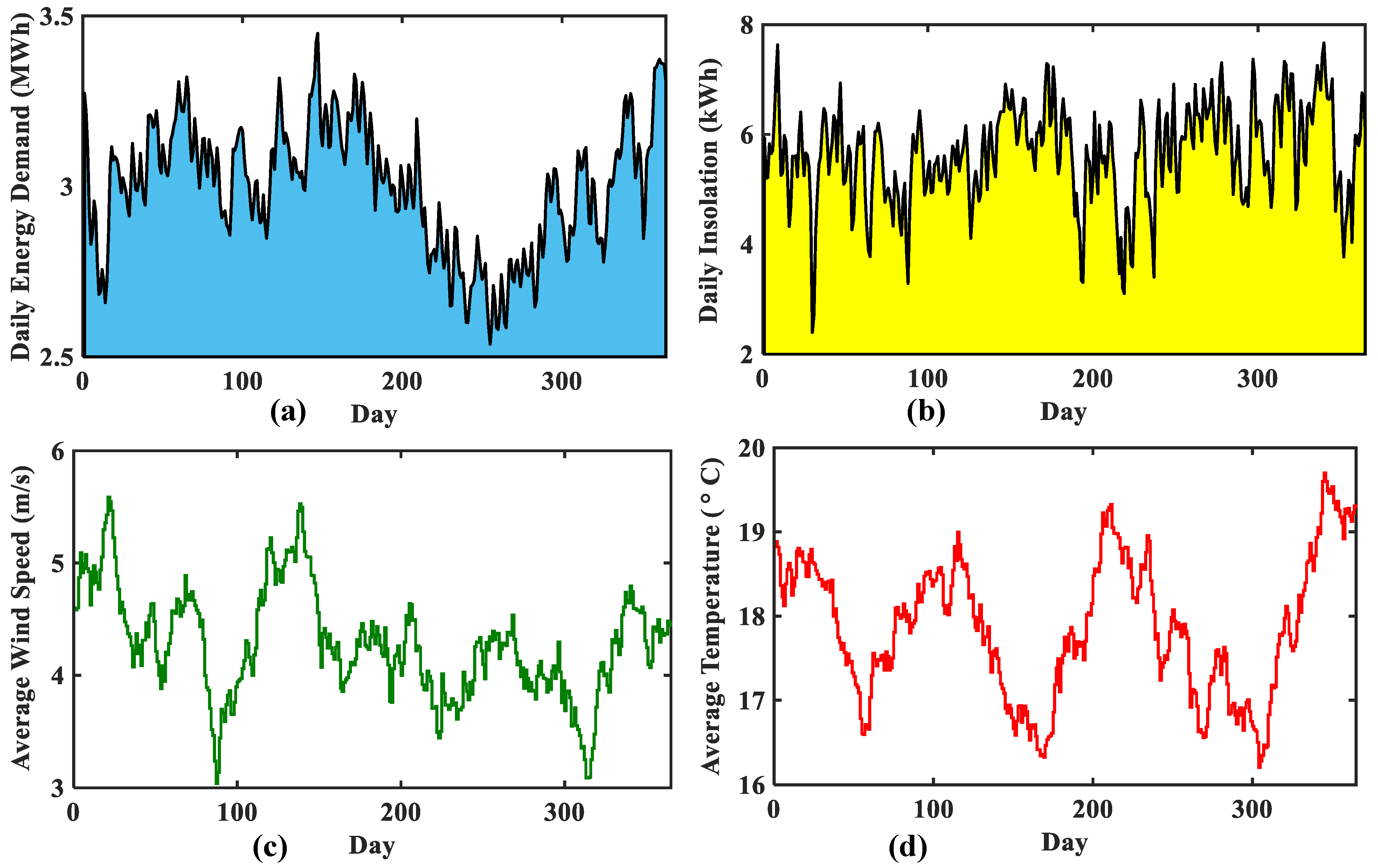
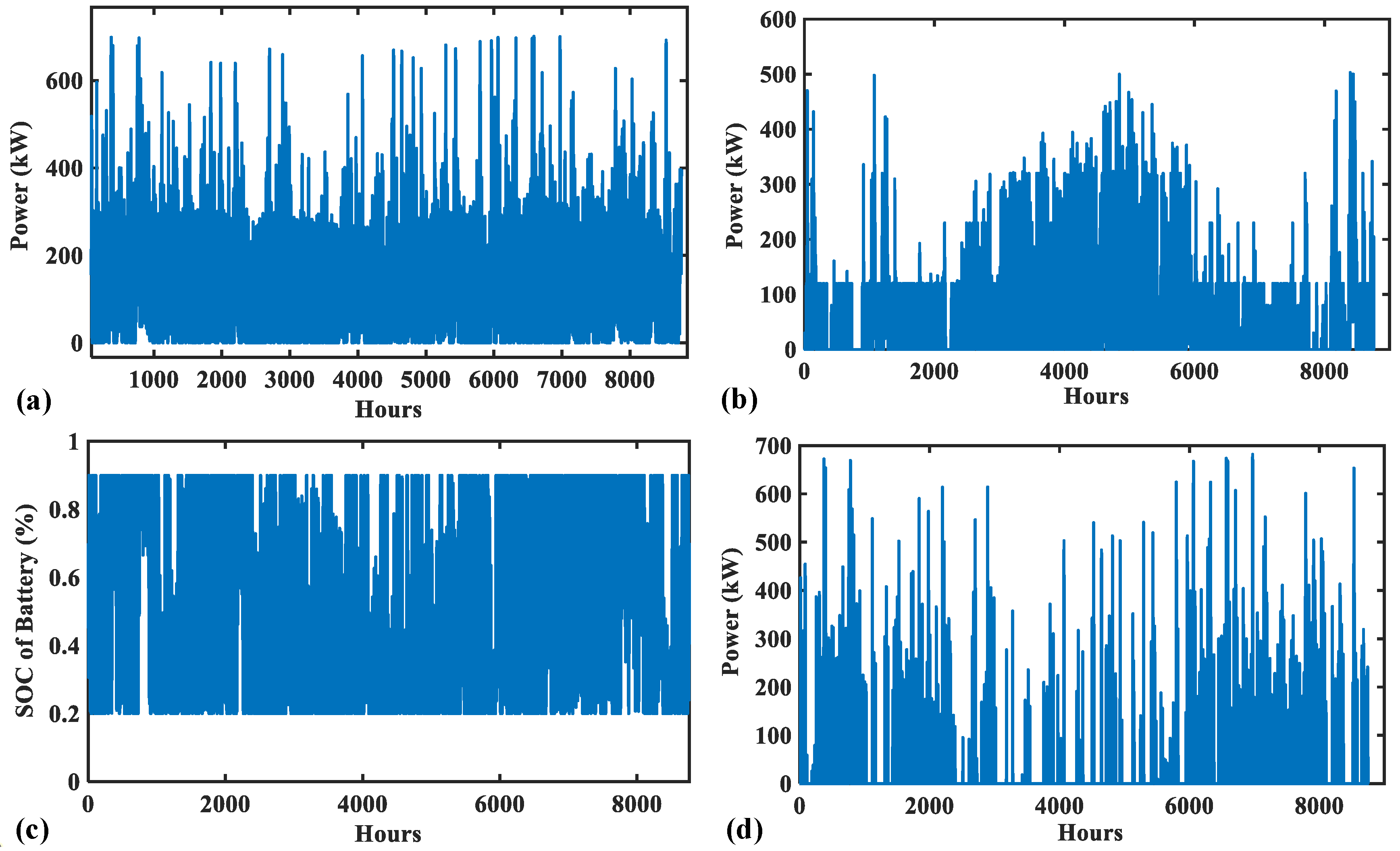
5.4.1. Load Characteristic
5.4.2. Weather
5.4.3. Components’ Data
6. Results and Discussions
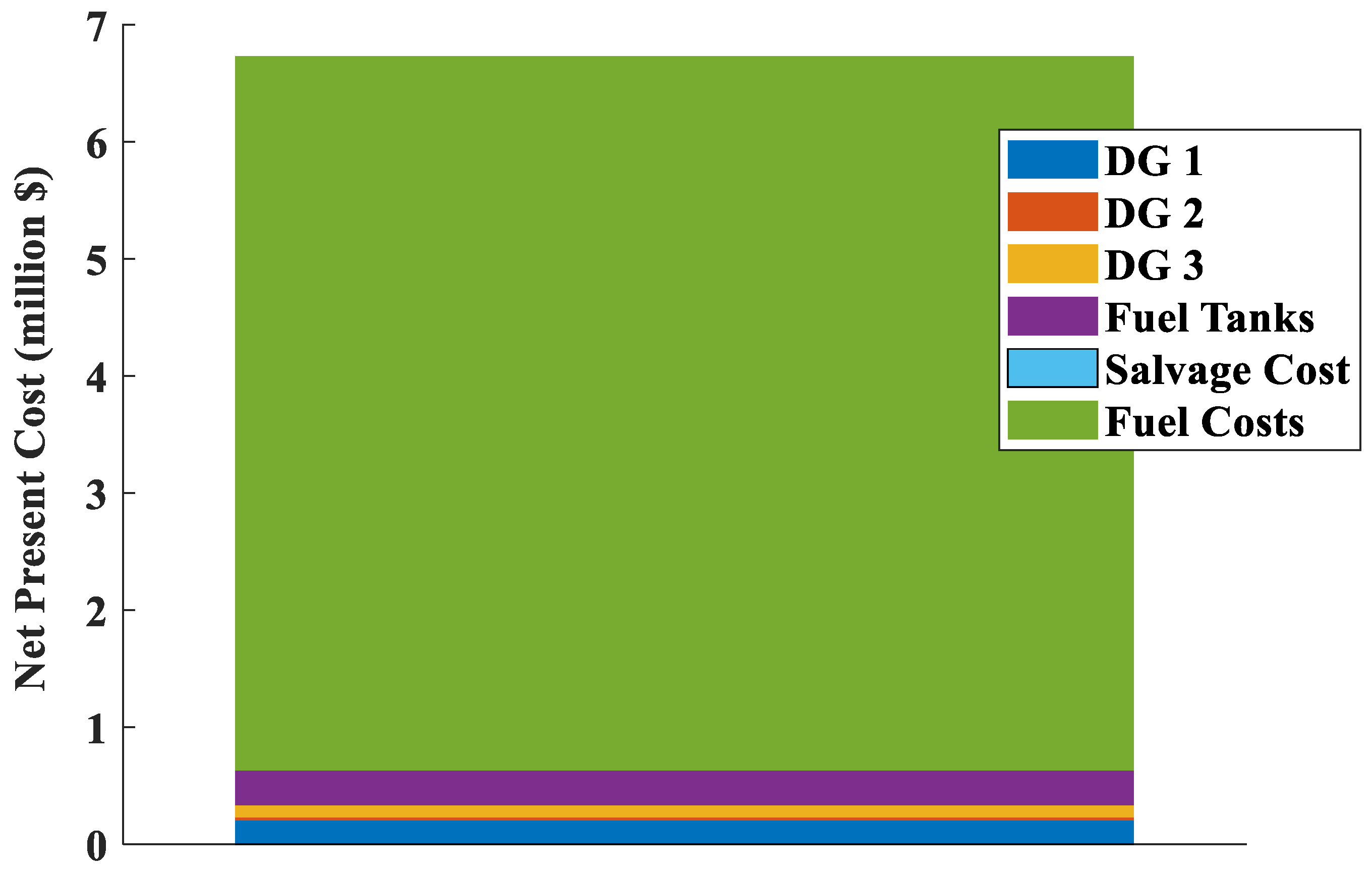
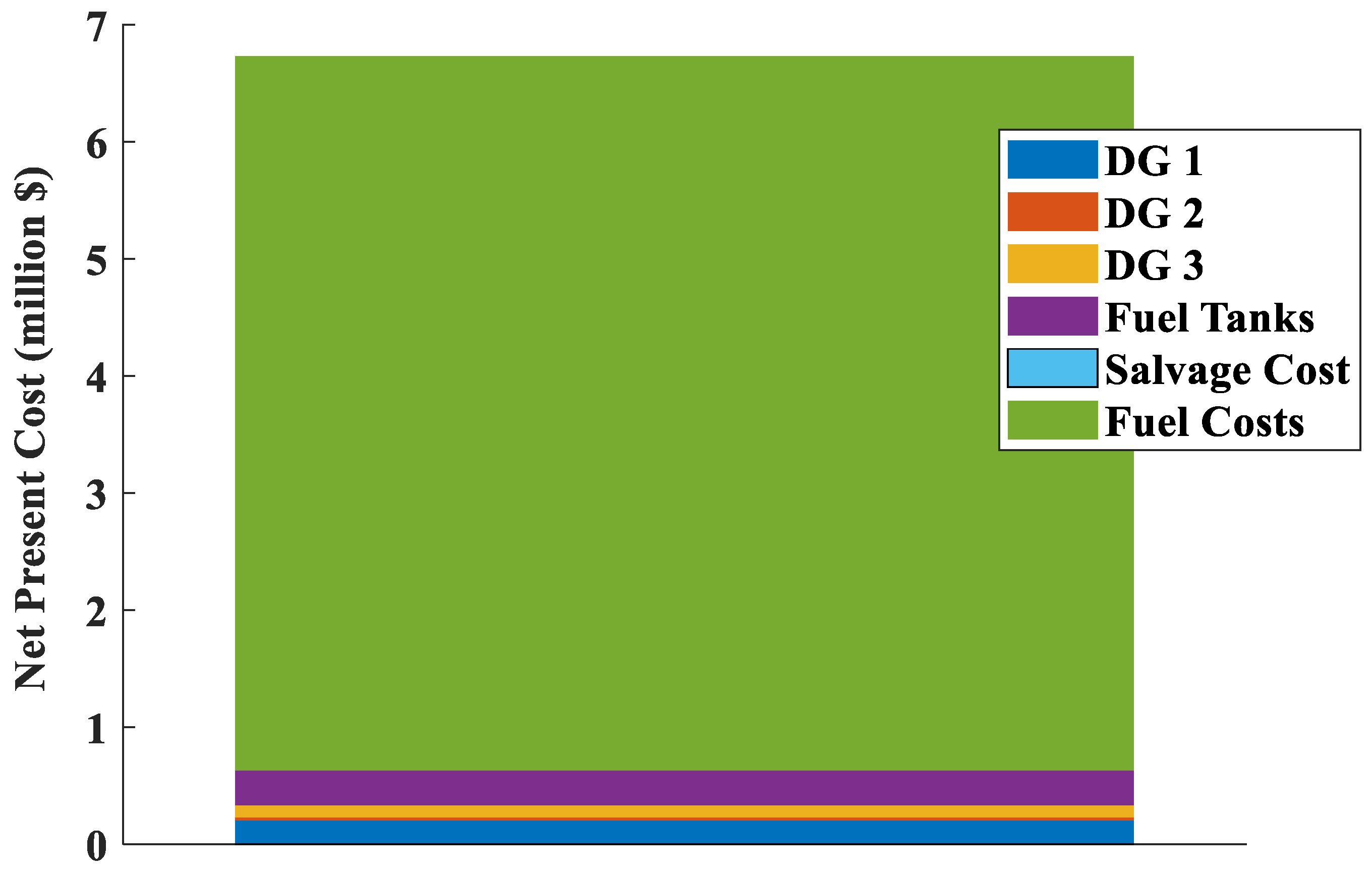
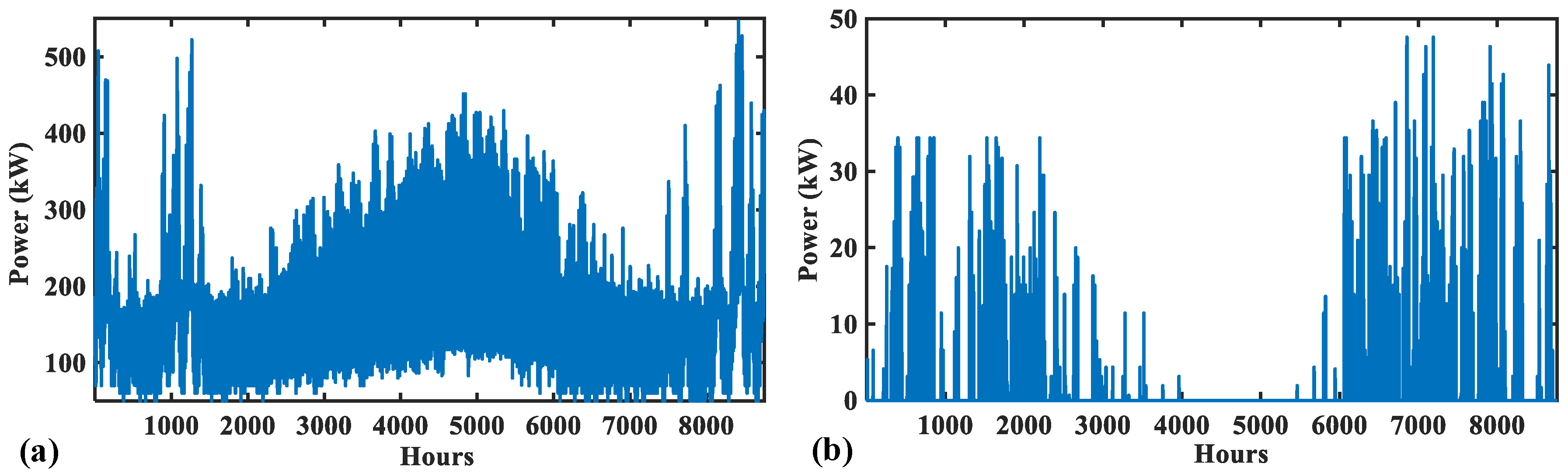
6.1. Configuration 1
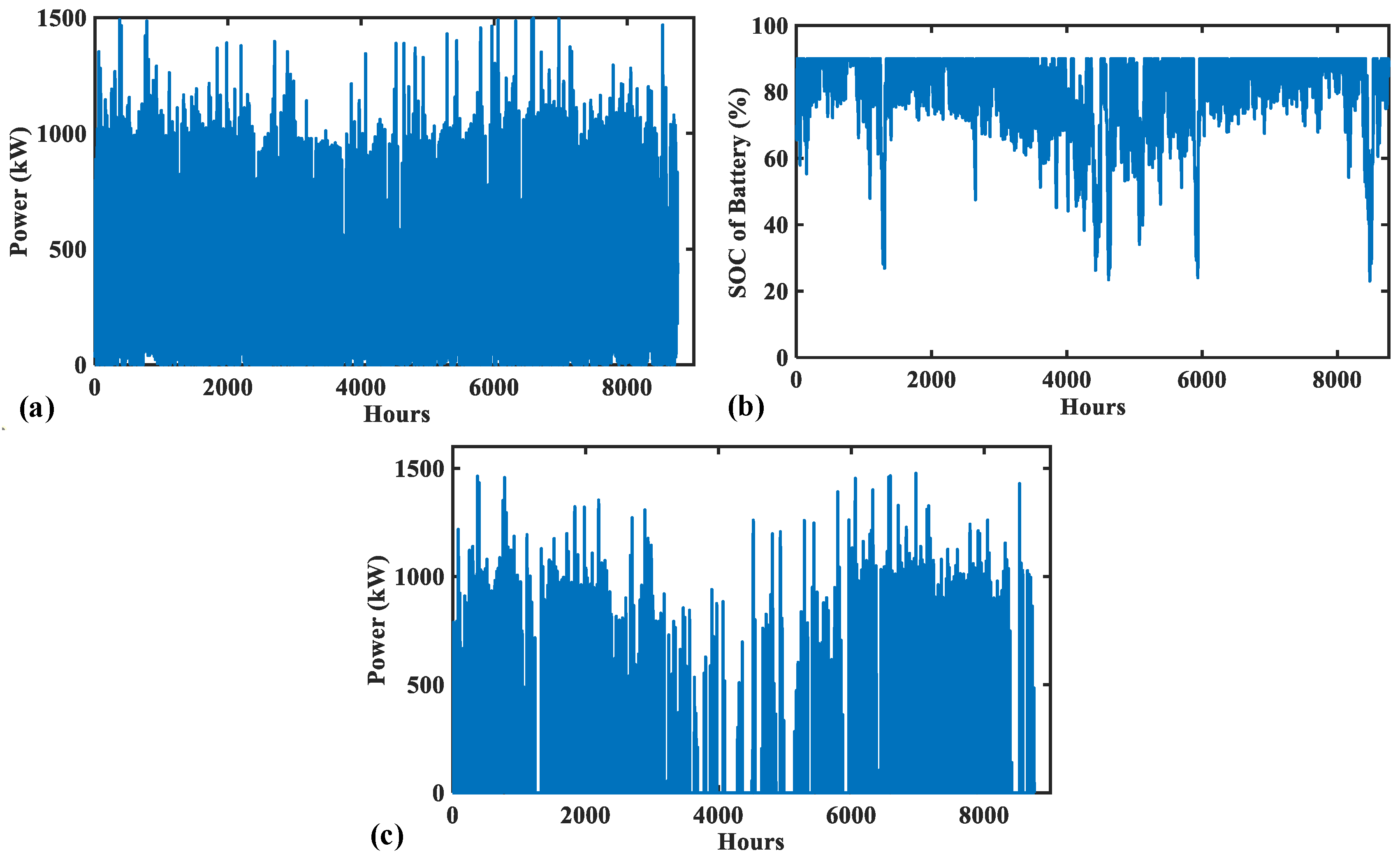
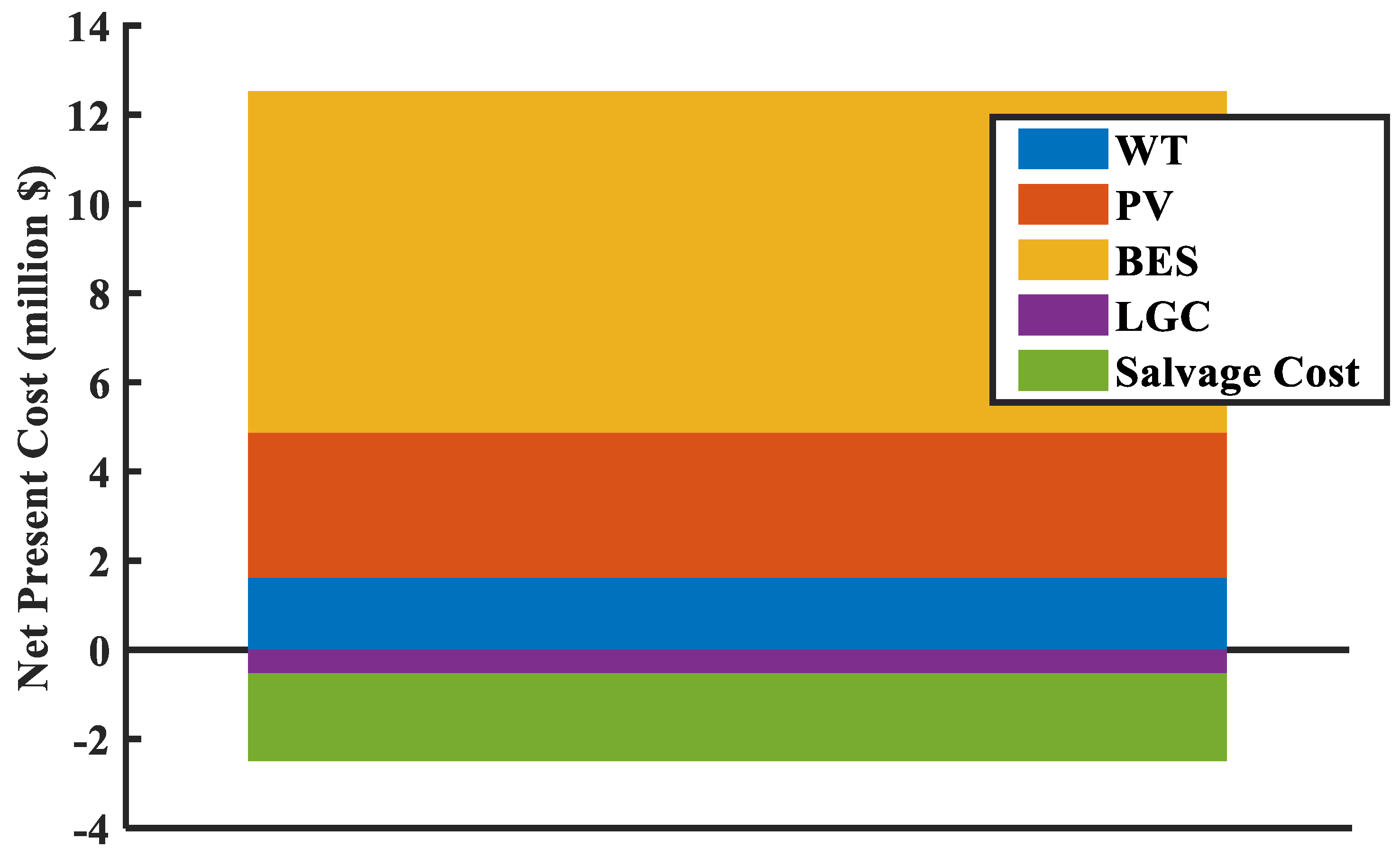
6.2. Configuration 2
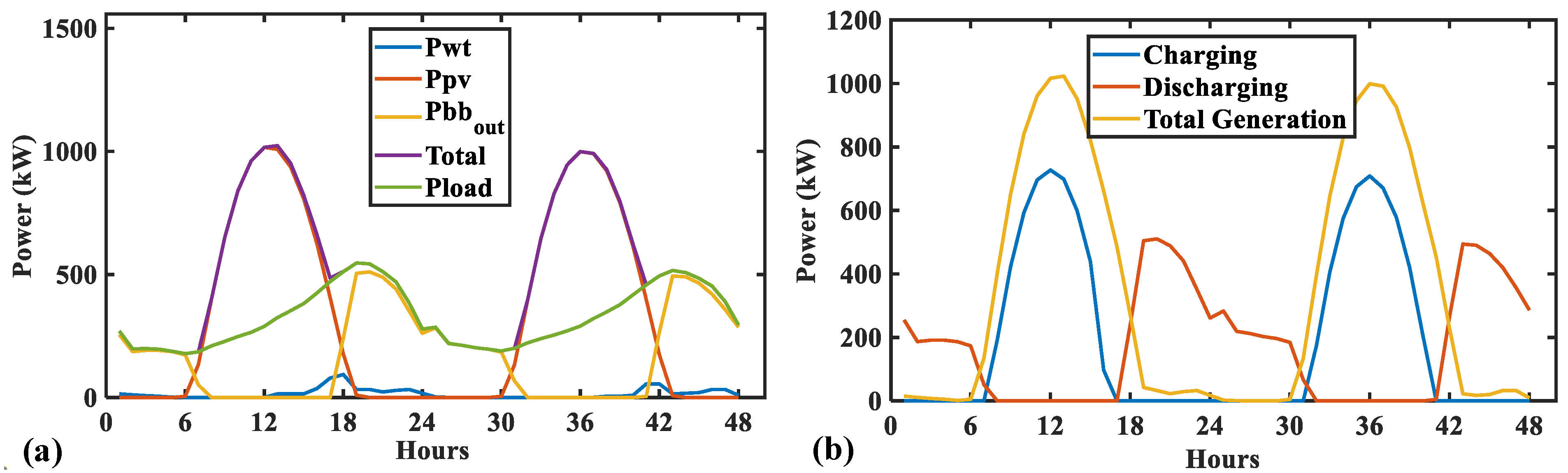
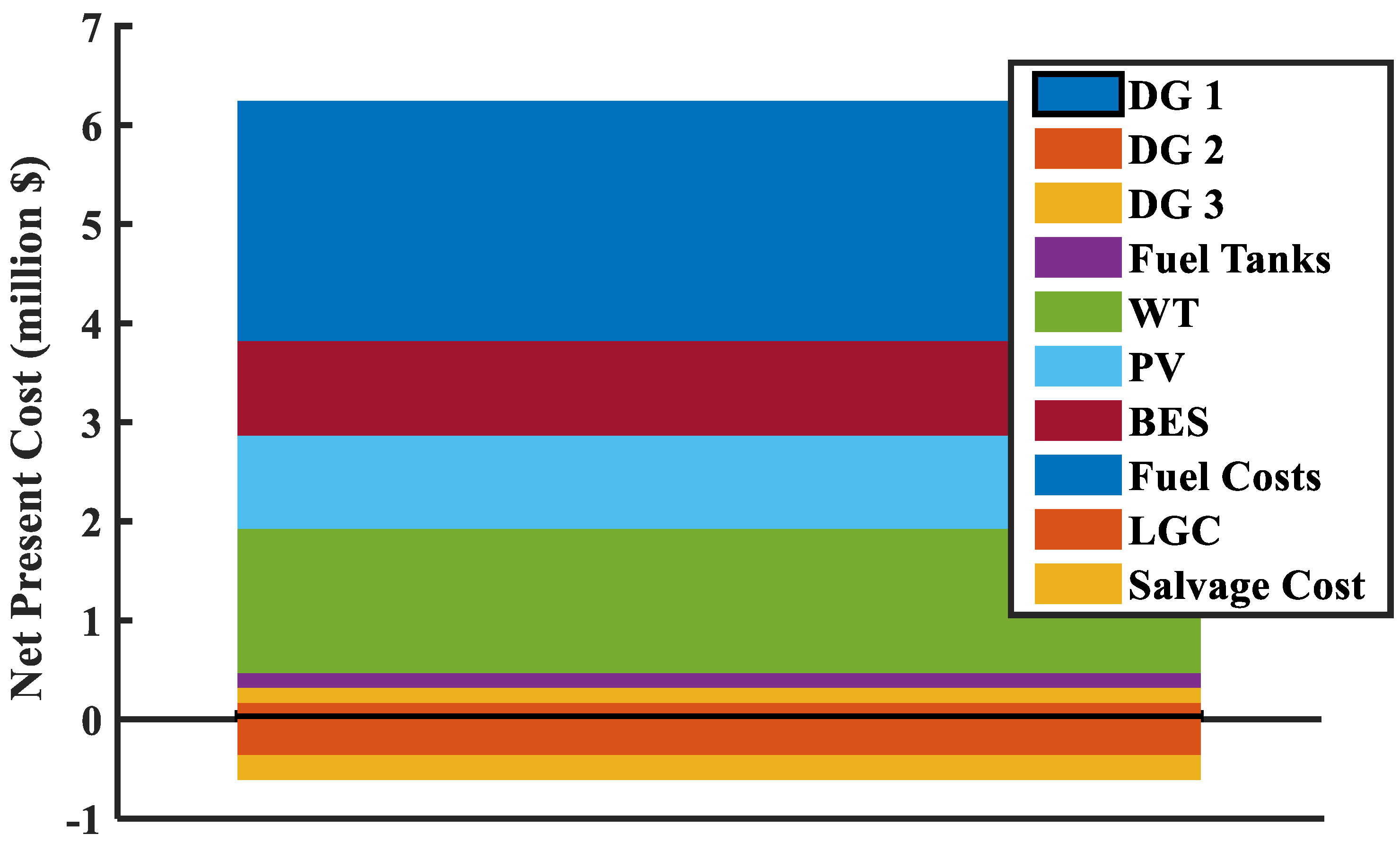
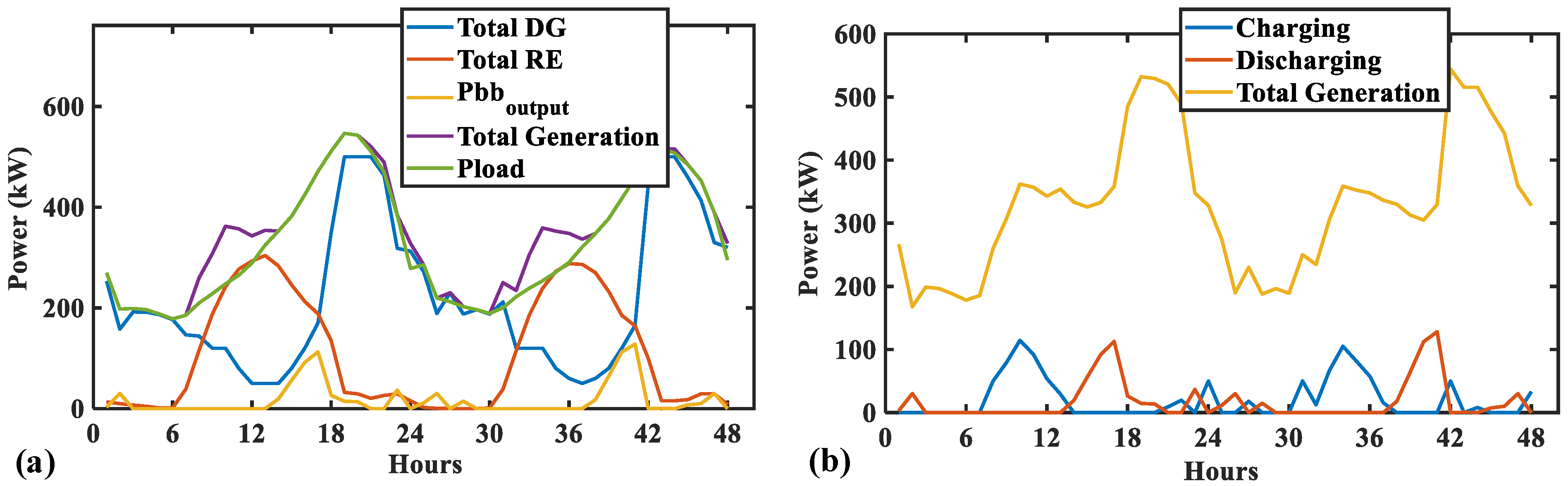
6.3. Configuration 3
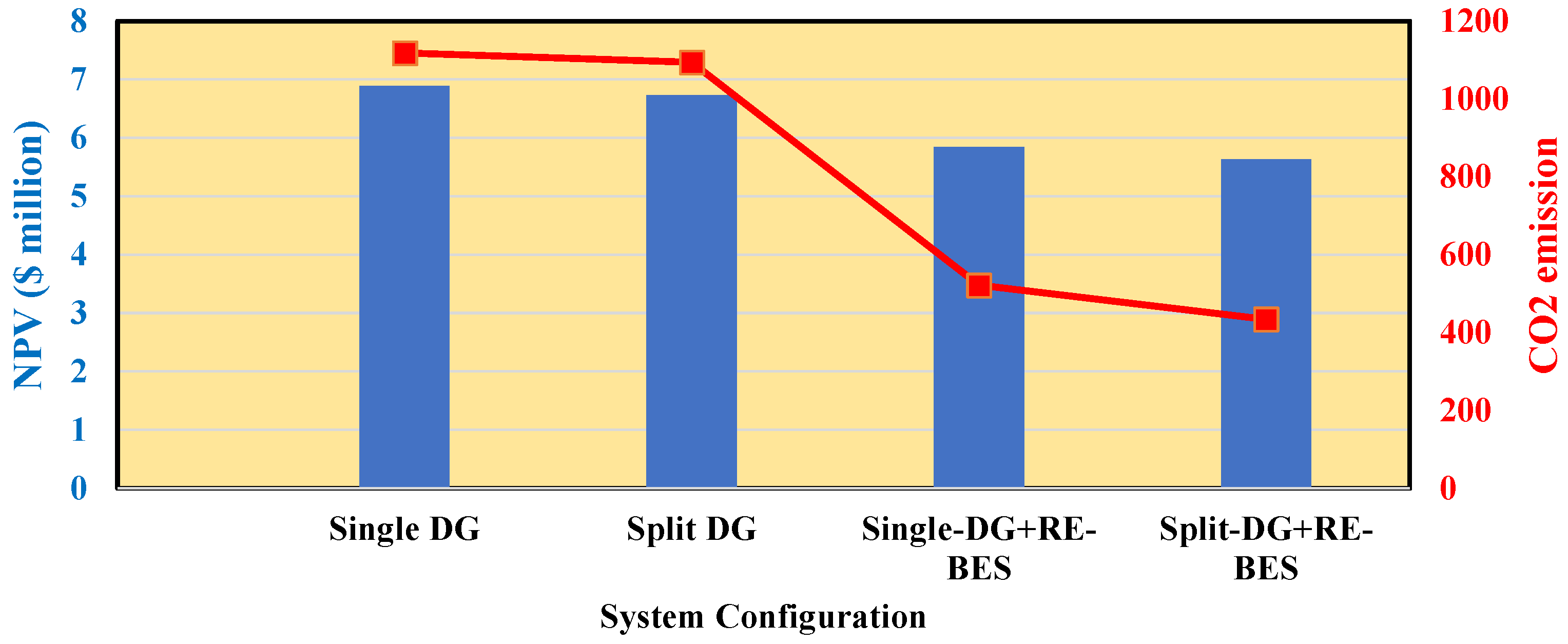
6.4. System Comparison
6.5. Advantages and Disadvantages
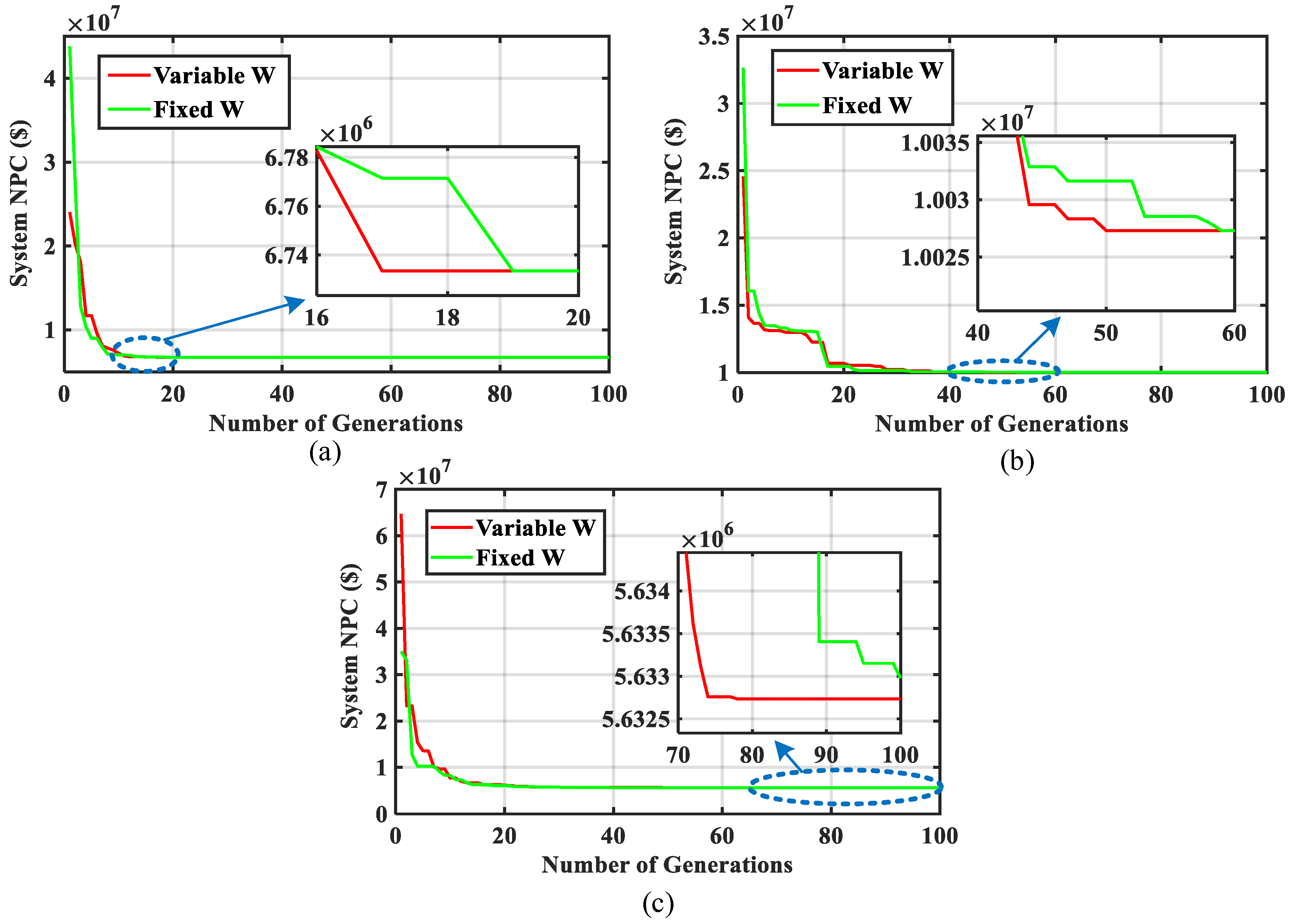
6.6. PSO Algorithm Comparison
7. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Symbol | Description |
| Economic Terms | |
| Capital cost of component j (AUD) | |
| Maintenance costs of component j (AUD) | |
| Replacement cost of component j (AUD) | |
| Fuel cost for each liter of consumption by the DGs (AUD/L) | |
| Component’s lifetime (year) | |
| Project’s lifetime (year) | |
| Remaining component’s lifetime (year) | |
| Total net present value (AUD) | |
| Capital present value of component j (AUD) | |
| Maintenance present value of component j (AUD) | |
| Replacement present value of component j (AUD) | |
| Salvation present value of component j (AUD) | |
| Total fuel present value (AUD) | |
| Total large-scale generation incentive (AUD) | |
| Number of replacements of components | |
| Interest rate and real interest rate for fuel cost (%) | |
| System Terms | |
| Total diesel consumption (kL) | |
| Minimum and maximum operating limits of DG (kW) | |
| Available input energy for the battery (kWh) | |
| Available output energy for the battery (kWh) | |
| Battery’s rated energy (kWh) | |
| Total CO2 emissions (tonne) | |
| Diesel emissions rate (kg/L) | |
| Fuel rate consumption of diesel generators (L/kWh) | |
| Fuel tank nominal capacity (kL) | |
| Fuel volume (kL) | |
| Maximum fuel tank capacity (kL) | |
| Minimum fuel tank volume (kL) | |
| Minimum number of days of diesel storage | |
| Degradation rate per year (%) | |
| Hub height (m) | |
| Measured wind speed’s height (m) | |
| Insolation (kW/m2) | |
| Insolation at standard test conditions (kWh/m2) | |
| Number of switching configuration | |
| Minimum number of DG type i ON | |
| Normal operating cell temperature (°C) | |
| Number of units of component j | |
| Battery’s rated power (kVA) | |
| Average load demand (kW) | |
| Charging power of battery (kW) | |
| Discharging power of battery (kW) | |
| Wind turbine’s output power (kW) | |
| Wind turbine’s rated power (kVA) | |
| Dumped power (kW) | |
| Load demand (kW) | |
| Solar PV’s output power (kW) | |
| Solar PV’s rated power (kVA) | |
| Spinning Reserve power (kW) | |
| Output power of diesel generator type i (kW) | |
| Rated power of DG type i (kW) | |
| Total diesel generation (kW) | |
| Total power generated (kW) | |
| Maximum and minimum state-of-charge of battery (%) | |
| State-of-charge of battery (%) | |
| Switch of DG type i | |
| Cell temperature (°C) | |
| Cell temperature at standard test conditions (°C) | |
| Ambient temperature (°C) | |
| Time (h) | |
| Measured wind speed (m/s) | |
| Wind speed (m/s) | |
| Wind speed cut-in (m/s) | |
| Wind speed cut-out (m/s) | |
| Wind speed rated (m/s) | |
| Solar PV’s efficiency (%) | |
| Battery’s efficiency (%) | |
| Wind turbine’s efficiency (%) | |
| Derating temperature coefficient (%) | |
| Time interval (h) | |
| Terrain’s friction coefficient (%) | |
| Algorithm Terms | |
| Global learning coefficient | |
| Inertia weight index | |
| Iteration | |
| Maximum and minimum inertia weight index | |
| Maximum number of iterations | |
| Particle | |
| Particle’s personal best position for iteration k | |
| Particle’s position for iterations k | |
| Particle’s velocity for iterations k | |
| Particles’ global best position for iteration k | |
| Personal learning coefficient | |
| Random numbers from 0 to 1 | |
References
- Renewable Energy/Off Grid. Available online: https://arena.gov.au/renewable-energy/off-grid/ (accessed on 25 September 2020).
- Australia’s Off-Grid Clean Energy Market Research Paper. Available online: https://arena.gov.au/knowledge-bank/australias-off-grid-clean-energy-market-research-paper/ (accessed on 16 March 2021).
- Babatunde, O.M.; Munda, J.L.; Hamam, Y. A Comprehensive State-of-the-Art Survey on Hybrid Renewable Energy System Operations and Planning. IEEE Access 2020, 8, 75313–75346. [Google Scholar] [CrossRef]
- Bukar, A.L.; Tan, C.W. A review on stand-alone photovoltaic-wind energy system with fuel cell: System optimisation and energy management strategy. J. Clean. Prod. 2019, 221, 73–88. [Google Scholar] [CrossRef]
- Maleki, A.; Pourfayaz, F. Optimal sizing of autonomous hybrid photovoltaic/wind/battery power system with LPSP technology by using evolutionary algorithms. Sol. Energy 2015, 115, 471–483. [Google Scholar] [CrossRef]
- Zhang, G.; Shi, Y.; Maleki, A.; Rosen, M.A. Optimal location and size of a grid-independent solar/hydrogen system for rural areas using an efficient heuristic approach. Renew. Energy 2020, 156, 1203–1214. [Google Scholar] [CrossRef]
- Moghaddam, M.J.H.; Kalam, A.; Nowdeh, S.A.; Ahmadi, A.; Babanezhad, M.; Saha, S. Optimal sizing and energy management of stand-alone hybrid photovoltaic/wind system based on hydrogen storage considering LOEE and LOLE reliability indices using flower pollination algorithm. Renew. Energy 2018, 135, 1412–1434. [Google Scholar] [CrossRef]
- Fares, D.; Fathi, M.; Mekhilef, S. Performance evaluation of metaheuristic techniques for optimal sizing of a stand-alone hybrid PV/wind/battery system. Appl. Energy 2021, 305, 117823. [Google Scholar] [CrossRef]
- Jurasz, J.; Ceran, B.; Orłowska, A. Component degradation in small-scale off-grid PV-battery systems operation in terms of reliability, environmental impact and economic performance. Sustain. Energy Technol. Assess. 2020, 38, 100647. [Google Scholar] [CrossRef]
- Zahedi, A. Maximising solar PV energy penetration using energy storage technology. Renew. Sustain. Energy Rev. 2011, 15, 866–870. [Google Scholar] [CrossRef]
- Dufo-López, R.; Bernal-Agustín, J.L.; Yusta, J.M.; Domínguez, J.A. Multi-objective optimisation minimising cost and life cycle emissions of stand-alone PV-wind-diesel systems with batteries storage. Appl. Energy 2011, 88, 4033–4041. [Google Scholar] [CrossRef]
- Combe, M.; Mahmoudi, A.; Haque, M.H.; Khezri, R. AC-coupled hybrid power system optimisation for an Australian remote community. Int. Trans. Electr. Energy Syst. 2020, 30, e12503. [Google Scholar] [CrossRef]
- Gebrehiwot, K.; Mondal, M.A.H.; Ringler, C.; Gebremeskel, A.G. Optimisation and cost-benefit assessment of hybrid power systems for off-grid rural electrification in Ethiopia. Energy 2019, 177, 234–246. [Google Scholar] [CrossRef]
- Ogunjuyigbe, A.S.O.; Ayodele, T.R.; Akinola, O.A. Optimal allocation and sizing of PV/Wind/Split-diesel/Battery hybrid energy system for minimising life cycle cost, carbon emission and dump energy of remote residential building. Appl. Energy 2016, 171, 153–171. [Google Scholar] [CrossRef]
- Khezzane, K.; Doumbia, M.L.; Khoucha, F. Multi-objective Sizing of Hybrid Generation Energy System for Remote Area Using Genetic Algorithm. In Proceedings of the 2021 Sixteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 5–7 May 2021; pp. 1–9. [Google Scholar] [CrossRef]
- Asefi, S.; Shayeghi, H.; Shahryari, E.; Dadkhah, R. Optimal management of renewable energy sources considering split-diesel and dump energy. Int. J. Tech. Phys. Probl. Eng. 2018, 10, 34–40. [Google Scholar]
- Mohammed, A.Q.; Al-Anbarri, K.A.; Hannun, R.M. Optimal Combination and Sizing of a Stand-Alone Hybrid Energy System Using a Nomadic People Optimizer. IEEE Access 2020, 8, 200518–200540. [Google Scholar] [CrossRef]
- Ayodele, T.R.; Ogunjuyigbe, A.S.O.; Akinola, O.A. N-split generator model: An approach to reducing fuel consumption, LCC, CO2 emission and dump energy in a captive power environment. Sustain. Prod. Consum. 2017, 12, 193–205. [Google Scholar] [CrossRef]
- Mohandes, B.; Acharya, S.; El Moursi, M.S.; Al-Sumaiti, A.S.; Doukas, H.; Sgouridis, S. Optimal Design of an Islanded Microgrid With Load Shifting Mechanism Between Electrical and Thermal Energy Storage Systems. IEEE Trans. Power Syst. 2020, 35, 2642–2657. [Google Scholar] [CrossRef]
- Sources of Greenhouse Gas Emissions. Available online: https://www.epa.gov/ghgemissions/sources-greenhouse-gas-emissions. (accessed on 3 February 2022).
- Analysis of 10-year record. Available online: http://www.renewablessa.sa.gov.au/topic/investor-information/renewable-energy-resource-maps/solar-energy-resource-maps (accessed on 11 October 2021).
- About the Renewable Energy. Available online: http://www.cleanenergyregulator.gov.au/RET/About-the-Renewable-Energy-Target (accessed on 12 October 2021).
- AlRashidi, M.R.; Alhajri, M.F.; Al-Othman, A.K.; El-Naggar, K.M. Particle Swarm Optimization and Its Applications in Power Systems. In Computational Intelligence in Power Engineering; Panigrahi, B.K., Abraham, A., Das, S., Eds.; Springer: Berlin, Germany, 2010; pp. 295–324. [Google Scholar] [CrossRef]
- Mazhoud, I.; Hadj-Hamou, K.; Bigeon, J.; Joyeux, P. Particle swarm optimisation for solving engineering problems: A new constraint-handling mechanism. Eng. Appl. Artif. Intell. 2013, 26, 1263–1273. [Google Scholar] [CrossRef]
- Population. Available online: https://plan.sa.gov.au/state_snapshot/population#:~:text=in%20South%20Australia,Population%20change%20in%20South%20Australia,average%20of%2010%2C300%20per%20year (accessed on 7 August 2021).
- Climate data online. Available online: http://www.bom.gov.au/climate/data/index.shtml?bookmark=200 (accessed on 14 October 2021).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Components | Real Input Data | Spinning Reserve | Degradation of PV and BES | DG’s and FT’s Constraints | ||||
|---|---|---|---|---|---|---|---|---|---|
| DG | FT | PV | WT | ESS | |||||
| [5] | × | × | √ | √ | √ | × | × | × | × |
| [6] | × | × | √ | × | √ | √ | × | × | × |
| [7] | × | × | × | √ | √ | × | × | × | × |
| [8] | × | × | √ | √ | √ | √ | × | × | × |
| [9] | × | × | √ | × | √ | × | × | √ | × |
| [10] | × | × | √ | × | √ | √ | √ | × | × |
| [11] | Single-size DG | × | √ | √ | √ | √ | × | × | × |
| [12] | Single-size DG | √ | √ | √ | √ | √ | √ | × | √ |
| [13] | Single-size DG | × | √ | √ | √ | × | × | × | × |
| [14] | Single-size Split-DG | × | √ | √ | √ | × | × | × | × |
| [15] | Single-size Split-DG | × | √ | √ | √ | × | × | × | × |
| [16] | Single-size Split-DG | × | √ | √ | √ | × | × | × | × |
| [17] | Single-size Split-DG | × | √ | √ | √ | √ | × | × | × |
| [18] | Single-size Split-DG | × | √ | √ | √ | √ | × | × | × |
| This study | Multi-size split-DG | √ | √ | √ | √ | √ | √ | √ | √ |
| Combination (k) | |||
|---|---|---|---|
| 1 | 1 | 0 | 0 |
| 2 | 0 | 1 | 0 |
| 3 | 0 | 0 | 1 |
| 4 | 1 | 1 | 0 |
| 5 | 1 | 0 | 1 |
| 6 | 0 | 1 | 1 |
| 7 | 1 | 1 | 1 |
| Parameter | Symbol | Value |
|---|---|---|
| Population | 500 | |
| Iterations | 100 | |
| Minimum search space limit | 0 | |
| Maximum search space limit | 20,000 | |
| Maximum variable inertia | 0.7 | |
| Minimum variable inertia | 0.1 | |
| Fixed inertia | 0.5 | |
| Personal and Global coefficient | 2 | |
| Number of variables or components | 4–7 |
| Annual Average | Maximum | Minimum | |
|---|---|---|---|
| Wind Speed (m/s) | 4.3 | 11.5 | 0 |
| Insolation (Wh/m2) | 431.7 | 1015 | 0 |
| Ambient Temp (°C) | 17.9 | 41.9 | 2.2 |
| Specification | Symbol | Quantity | Specification | Symbol | Quantity |
|---|---|---|---|---|---|
| Diesel Generator 1 | Wind Turbine | ||||
| Nominal power | 25 kW | Nominal power | 10 kW | ||
| Min. Operation | 40% | Wind speed cut-in | 3 m/s | ||
| Max Operation | 90% | Wind speed nominal | 12 m/s | ||
| Fuel consumption | 0.3 L/kWh | Wind speed cut-out | 25 m/s | ||
| Lifetime | 10 years | Hub height | 25 m | ||
| Capital cost | AUD 5250 | Friction coefficient | 0.4 | ||
| Replacement cost | AUD 5250 | Efficiency | 88% | ||
| O&M cost | AUD 525 | Lifetime | 10 years | ||
| Diesel Generator 2 | Capital cost | AUD 30,000 | |||
| Nominal power | 50 kW | Replacement cost | AUD 3000 | ||
| Min. Operation | 40% | O&M cost | AUD 100 | ||
| Max Operation | 90% | Photovoltaic Array | |||
| Fuel consumption | 0.30 L/kWh | Nominal power | 1 kW | ||
| Lifetime | 10 years | Cell temperature STC | 25 °C | ||
| Capital cost | AUD 10,500 | Cell temperature NOCT | 45 °C | ||
| Replacement cost | AUD 10,500 | Temperature derating | 0.4%/°C | ||
| O&M cost | AUD 1050 | Efficiency | 86% | ||
| Diesel Generator 3 | Degradation | g | 0.95%/year | ||
| Nominal power | 100 kW | Tilt angle | 30° | ||
| Min. Operation | 40% | Azimuth | 0° | ||
| Max Operation | 90% | Lifetime | 10 years | ||
| Fuel consumption | 0.30 L/kWh | Capital cost | AUD 1500 | ||
| Lifetime | 10 years | Replacement cost | AUD 300 | ||
| Capital cost | AUD 21,000 | O&M cost | AUD 25 | ||
| Replacement cost | AUD 21,000 | Battery Bank | |||
| O&M cost | AUD 2100 | Nominal power | 0.4 kW | ||
| Fuel Tank | Nominal energy | 1 kWh | |||
| Nominal capacity | 10 kL | Min. SOC | 20% | ||
| Min. days of storage | 7 days | Max. SOC | 90% | ||
| Frequency refill | 30 days | Initial SOC | 70% | ||
| Lifetime | 20 year | Efficiency | 91% | ||
| Capital cost | AUD 40,000 | Lifetime | 20 year | ||
| Replacement cost | AUD 30,000 | Capital cost | AUD 600 | ||
| O&M cost | AUD 1000 | Replacement cost | AUD 400 | ||
| O&M cost | AUD 10 | ||||
| Configuration [DG1, DG2, DG3, FT] | NPV (AUD Million) | Diesel Generation (MWh) | Fuel Consumption (kL/Year) | Dumped Energy (MWh) | CO2 Emissions (Tonne/Year) |
|---|---|---|---|---|---|
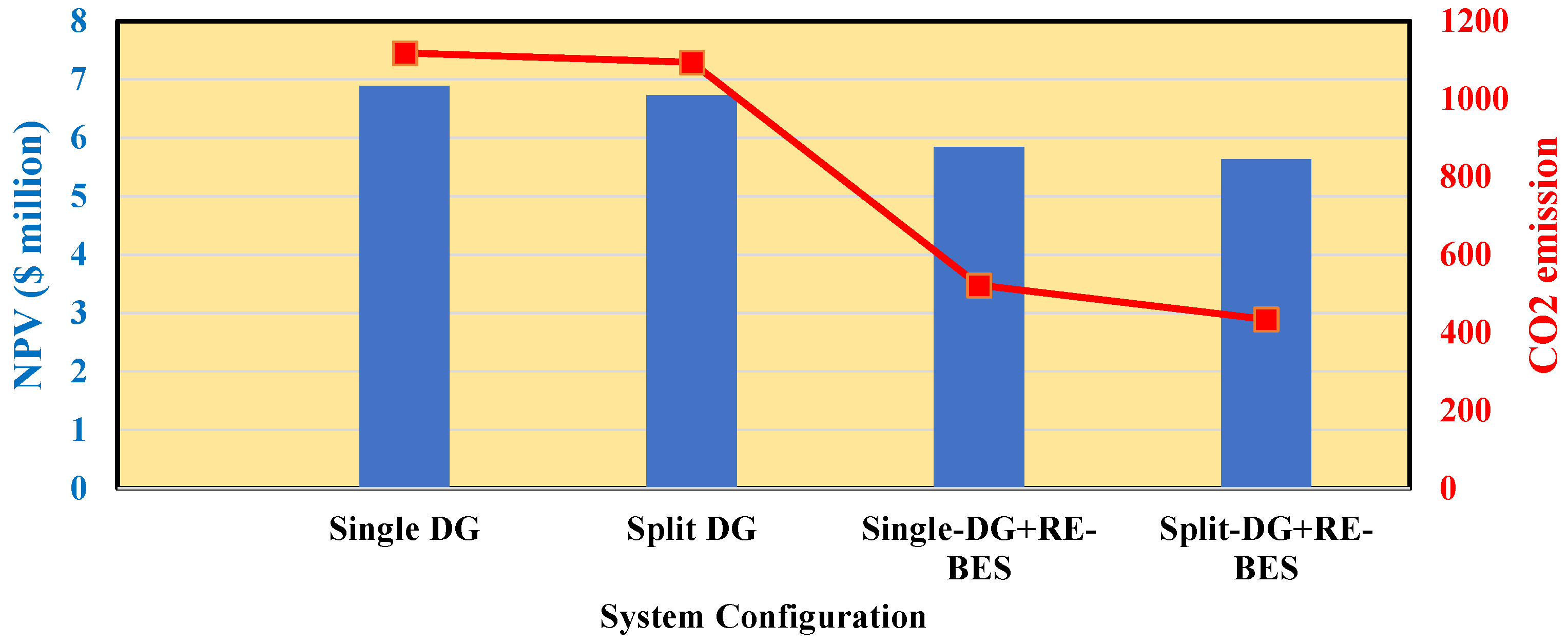
| [16, 1, 2, 6] | 6.733 | 1350.74 | 405.22 | 14.65 | 1094 |
| Configuration [WT, PV, BES] | NPV (AUD Million) | Energy Generated (MWh) | PV Energy (MWh) | WT Energy (MWh) | BES Charging (MWh) | BES Discharging (MWh) | Dumped Energy (MWh) |
|---|---|---|---|---|---|---|---|
| [50, 1728, 10,956] | 10.03 | 2833.80 | 2243.61 | 590.18 | 766.75 | 633.01 | 1363.96 |
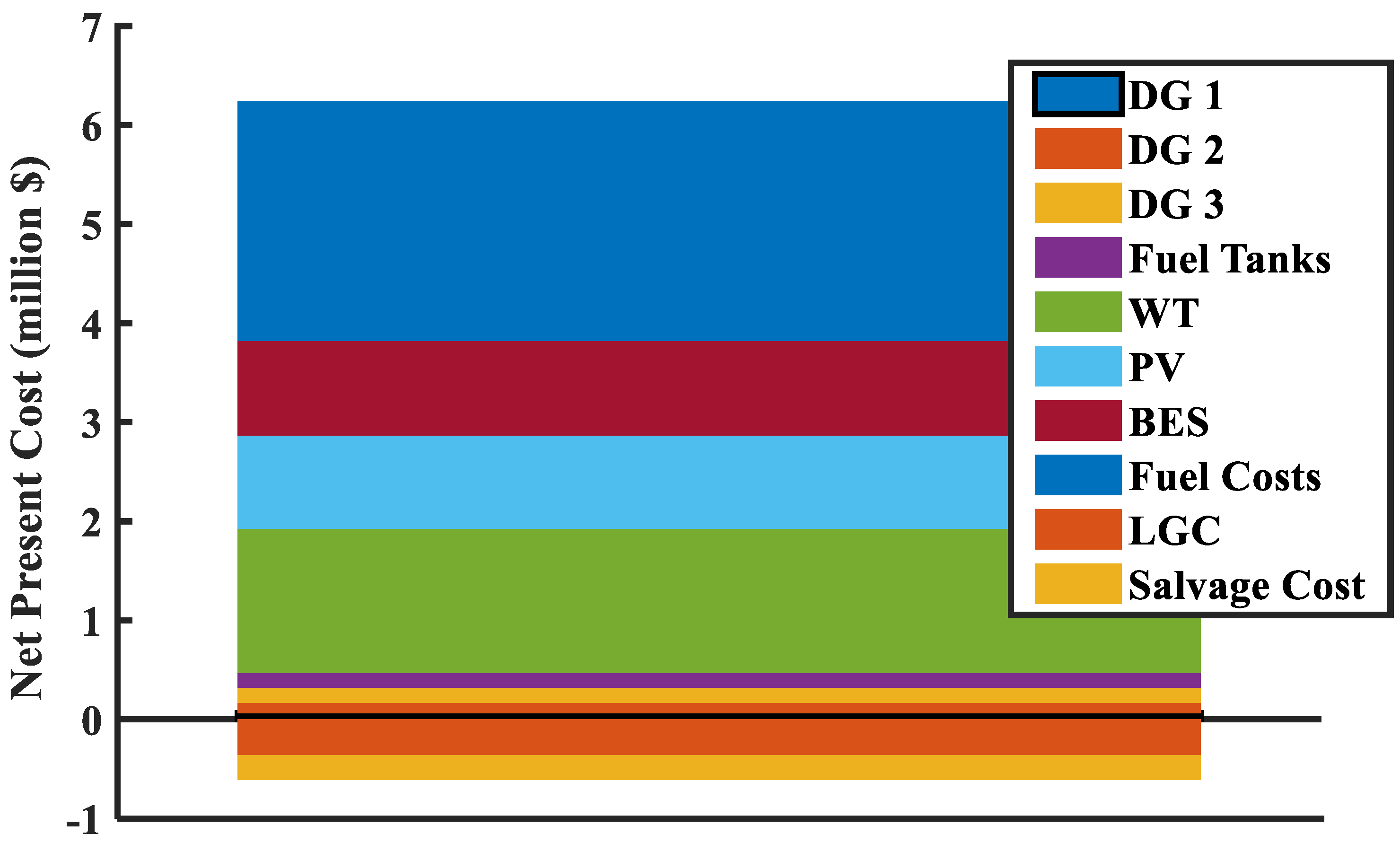
| Configuration [DG1, DG2, DG3, FT, WT, PV, BES] | NPV (AUD Million) | Diesel Generation (MWh) | RE Energy (MWh) | RE Index (%) | Dump Energy (MWh) | Fuel (L/Year) | CO2 (Tonne/Year) |
| [5, 4, 3, 3, 45, 498, 1372] | 5.634 | 535.54 | 1177.8 | 68.74 | 320.86 | 160.66 | 433.78 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cardenas, G.A.R.; Khezri, R.; Mahmoudi, A.; Kahourzadeh, S. Optimal Planning of Remote Microgrids with Multi-Size Split-Diesel Generators. Sustainability 2022, 14, 2892. https://doi.org/10.3390/su14052892
Cardenas GAR, Khezri R, Mahmoudi A, Kahourzadeh S. Optimal Planning of Remote Microgrids with Multi-Size Split-Diesel Generators. Sustainability. 2022; 14(5):2892. https://doi.org/10.3390/su14052892
Chicago/Turabian StyleCardenas, Gabriel Andres Rojas, Rahmat Khezri, Amin Mahmoudi, and Solmaz Kahourzadeh. 2022. "Optimal Planning of Remote Microgrids with Multi-Size Split-Diesel Generators" Sustainability 14, no. 5: 2892. https://doi.org/10.3390/su14052892
APA StyleCardenas, G. A. R., Khezri, R., Mahmoudi, A., & Kahourzadeh, S. (2022). Optimal Planning of Remote Microgrids with Multi-Size Split-Diesel Generators. Sustainability, 14(5), 2892. https://doi.org/10.3390/su14052892