1. Introduction
Automatic Identification System (AIS) is a maritime communication system using marine Very High Frequency (VHF) radio and Self Organizing Time Division Multiple Access (SOTDMA) transmission protocol for the exchange of ship identification and other navigational information [
1,
2,
3]. AIS can transmit information autonomously and continuously to other ships and facilities equipped with receivers within an acceptable communication range, which is considered to be a major break from the traditional passive systems such as radar [
4]. According to the guidelines given by the International Maritime Organization (IMO), the purposes of AIS include helping to identify ships, assisting in target tracking, assisting in search and rescue operations, simplifying information exchange, and providing additional information to assist situation awareness [
1]. AIS was first designed in the 1990s [
4] and has been in continuous development since then.
For shipborne AIS, transmitted information may include dynamic information, providing live information about the vessel, such as a ship’s geographical coordinates, course over ground (COG), speed over ground (SOG), etc., as well as static information that is relatively permanent to a particular vessel, including ship’s name, Maritime Mobile Service Identity (MMSI), dimensions, etc., along with voyage-related information specific to each voyage, such as the ship’s navigational status, destination, estimated time of arrival (ETA), etc., [
1,
2,
5]. Providing this dynamic, static, voyage-related, and other additional information, AIS has improved both the safety of navigation on water as well as an enhanced level of surveillance from land [
6], but it still faces some difficulties.
For example, not all ships carry AIS; therefore, even though it was stipulated in the International Convention for the Safety of Life at Sea (SOLAS) [
7] since 2008 for all ships of 300 gross tonnage (GT) or more engaged in international voyages, all ships of 500 GT or more not engaged in international voyages, and all passenger ships regardless of size have become mandatory for navigational safety, there are still many vessels not included by the regulation. This includes vessels such as leisure crafts, fishing boats, and ships between 300 and 500 GT not engaged on international voyages [
1,
8], which means those vessels are still unable to obtain other ships’ navigational information through AIS as well as making it difficult for other ships to detect and identify them by passive systems such as radar, due to their lesser size [
9].
To solve this problem, we developed BlueNavi, a sustainable platform solution to bridge the gap between the widespread use of AIS in field of navigation safety and the low carriage rate of AIS on small vessels.
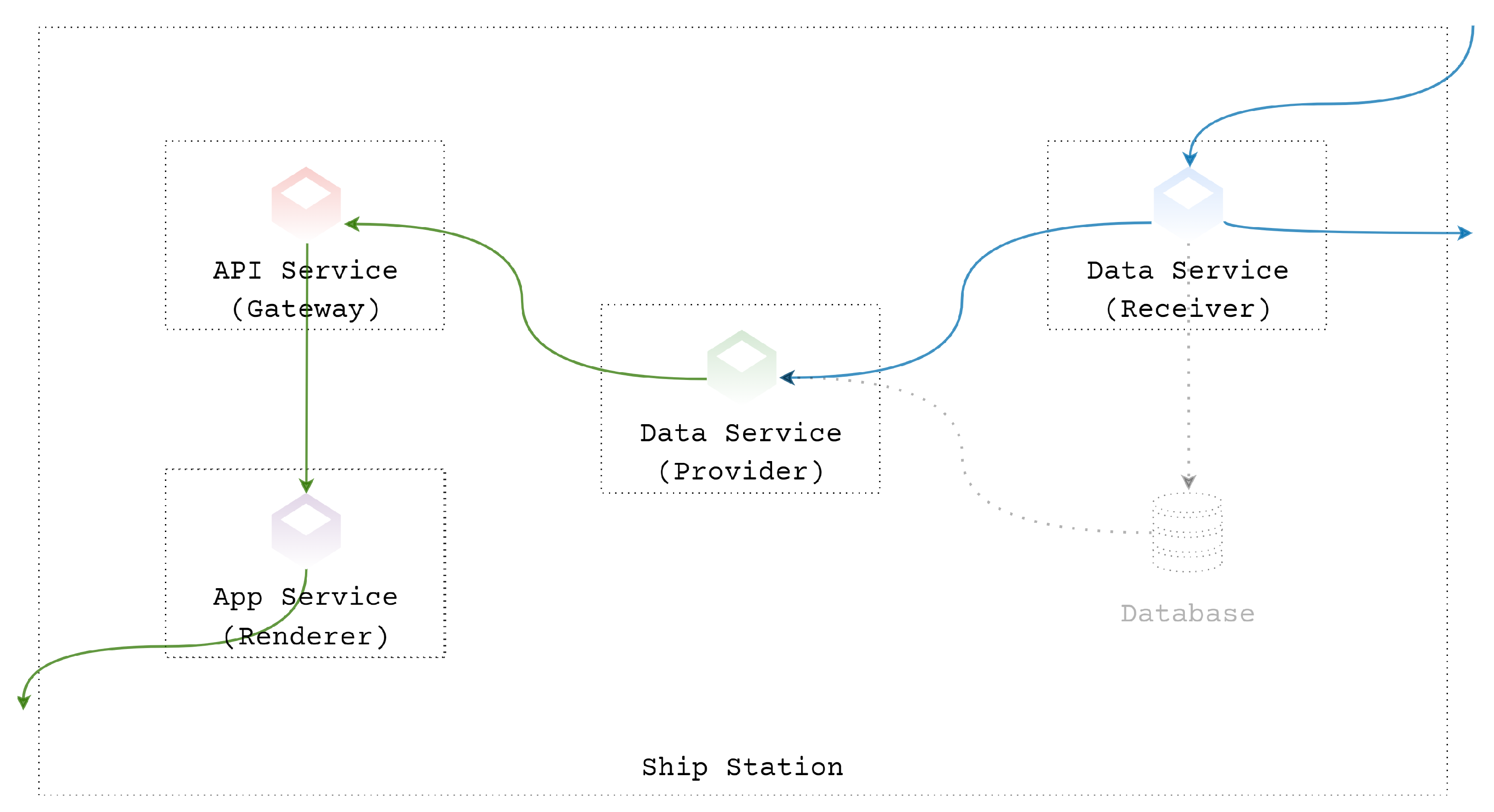
BlueNavi consists of ship stations, land stations, and data centers. It gives users the flexibility to customize on-demand, based on practical application scenarios.
BlueNavi ship stations can work independently with existing or extra Class-A AIS, Class-B AIS, or just simple lower-cost AIS receivers that do not have a data transmission function. Data received by those on-board AIS devices are parsed, preprocessed, stored, and then provided to users through the application (hereinafter, called BlueNavi App).
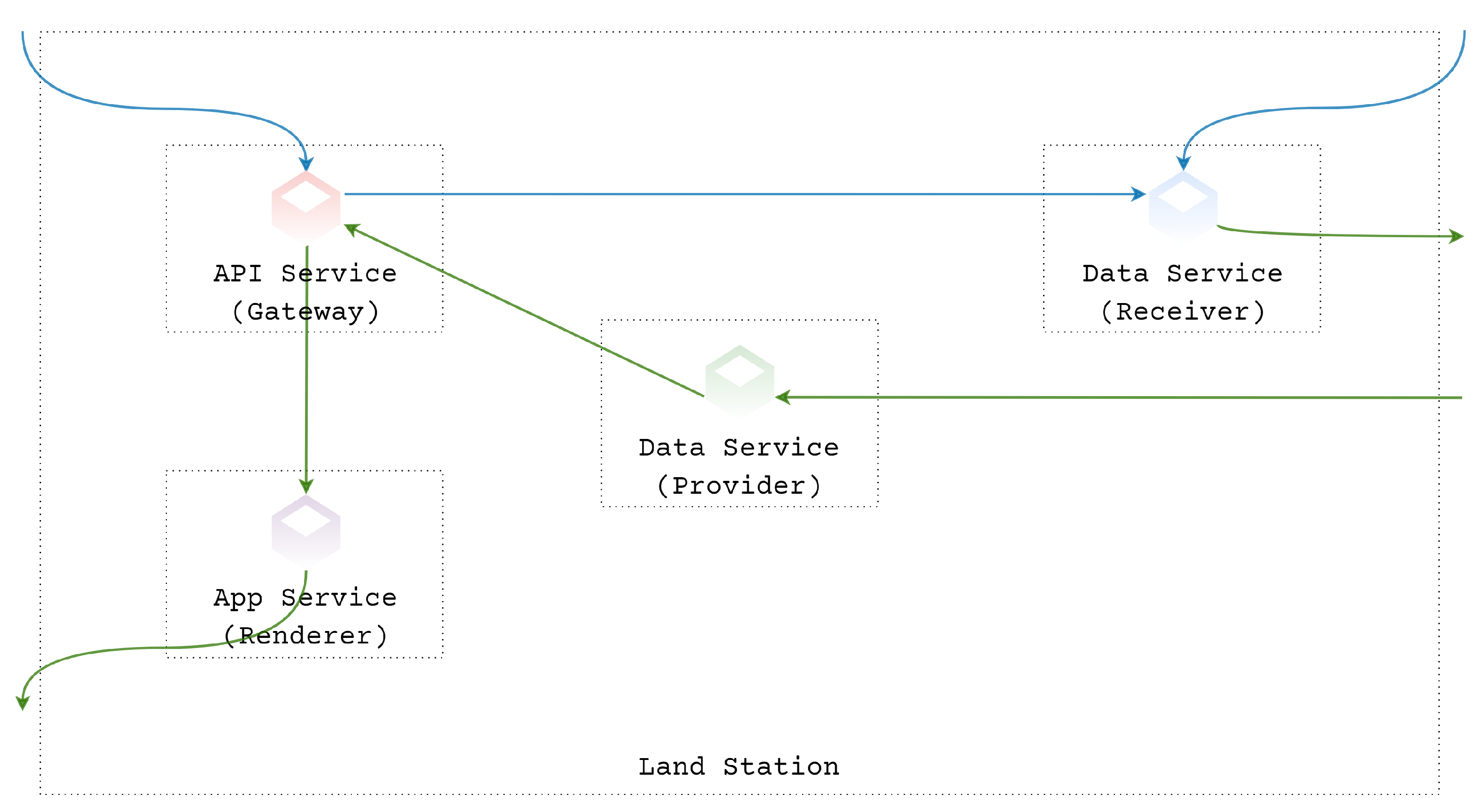
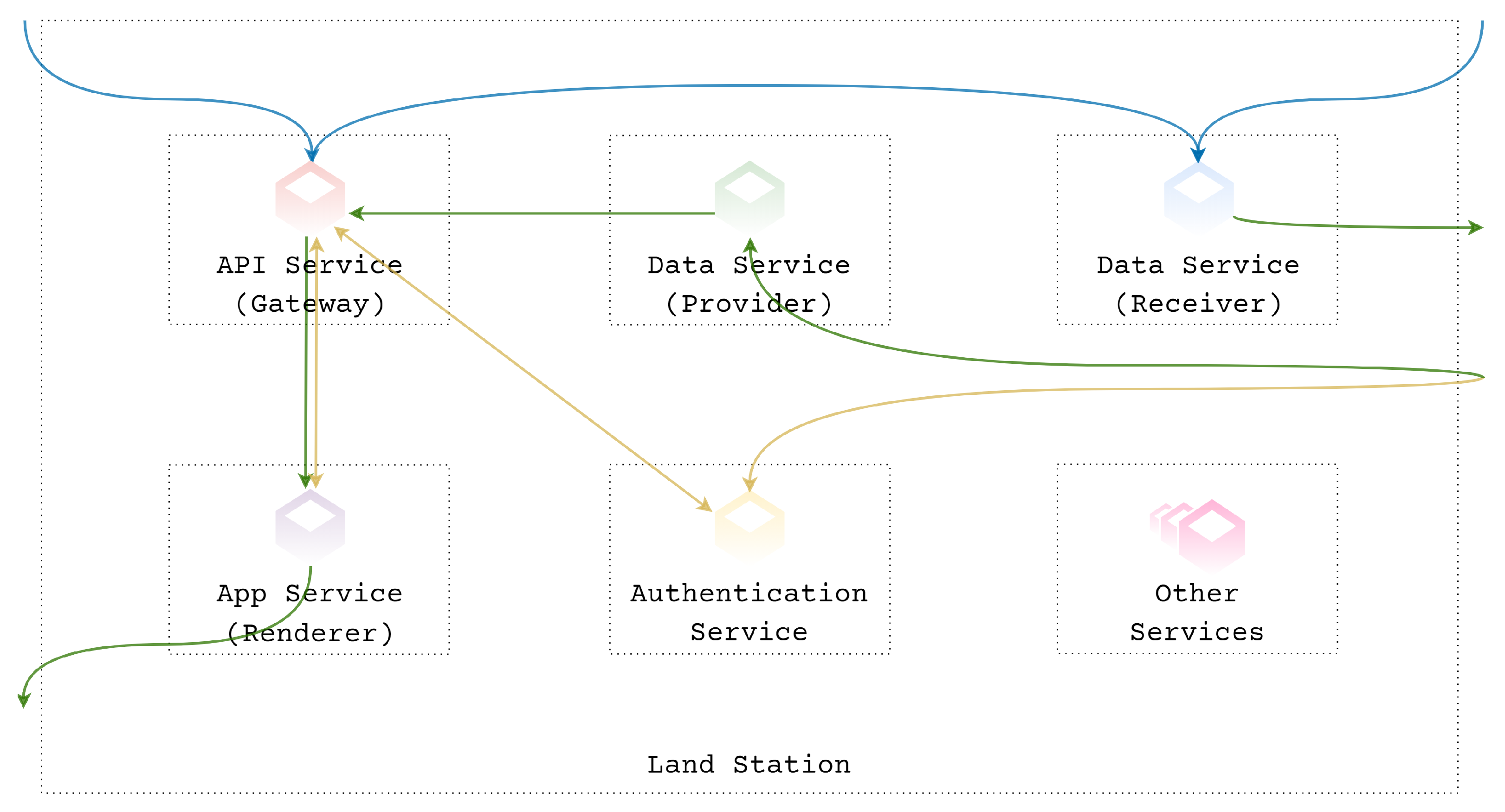
BlueNavi can also work without the need for any AIS devices installed when users are able to connect to land stations via the internet. Data, in this instance, are collected from other ship stations or land stations equipped with AIS devices and stored in data centers. Land stations provide data to users on request.
BlueNavi ship stations working with onboard AIS devices and land stations through the internet can function as a complete system. Consequently, users can obtain AIS information collected not only by shipborne AIS but also by land stations and/or other ship stations regardless of the limitations of the VHF propagation distance. Furthermore, due to the substantial computing power of land stations, services requiring big data, heavy computing, or high loads, such as statistics-based or artificial intelligence-based data analysis, can also be provided to users on board. Moreover, in addition to the AIS information, land stations can also provide other maritime information, including map data, satellite chart data, and meteorological and sea state information, to support the officer of the watch (OOW) and improve the safety and convenience of navigation.
This paper is organized as follows:
Section 2 briefly introduces the background and related work of our research.
Section 3 explains the specific design of the BlueNavi platform.
Section 4 details the land and live-ship tests.
Section 5 discusses the test results.
Section 6 summarizes and presents the conclusions and outlines the main directions for future research.
2. Background and Related Work
In this section, we discuss the problem in terms of AIS in safe navigation and technologies chosen to help developing BlueNavi.
2.1. AIS in Safe Navigation
AIS is considered to play an important role in safe navigation because of its ability to provide accurate dynamic information coming directly from various sensors on board as well as other static and voyage-related data [
1,
2,
3,
10]. Specifically, AIS data are significant in collision avoidance decision [
11,
12], collision risk detection and analysis [
13,
14,
15,
16], path planning [
17,
18], etc., [
19]. For these reasons, the mandatory equipment of AIS for passenger ships and large cargo ships has been officially included in SOLAS. In addition, on the basis of SOLAS, countries around the world have also made more stringent regulations on the mandatory carriage of AIS equipment on their vessels [
20].
However, despite this, there is still a significant number of small vessels that are not yet equipped with AIS. According to a survey conducted by Serra-Sogas [
21], an estimated 70% of the total number of vessels do not transmit AIS in target areas of the Salish Sea, Canada alone, and a significant portion of these non-AIS vessels are recreational boats. In addition, during Tanaka’s research voyage [
22], it was found that in various sea areas around the world, including Panama, Suez, Seto Inland Sea of Japan, etc., the AIS carriage rate is less than 50%. The absence of AIS not only brings a risk to the navigation of the ownship but also poses a risk to other ships and traffic surveillance because of the AIS-unrecognizability.
To solve this problem, two approaches have been put forward. One is to equip these vessels with Class-B AIS equipment [
23] which, although not in full accordance with the related requirements of IMO [
1], has an advantage of cost over fully functional Class-A devices [
23]. The other approach is for the vessels to use the internet. In this scenario, they do not need AIS but can still obtain the AIS information collected by third-parties while still inshore when internet connections are available.
However, the first solution still requires additional software because AIS device itself either has only a minimum keyboard and display (MKD) or does not even have display or input capabilities (on some Class-B or non-standard AIS devices). Otherwise, without software to help visualize the data and provide various functions, it is of limited help to the navigation of the ownship. The second solution is problematic since they are still unable to transmit information to other ships for identification, and when sailing in waters with no internet, they are unable to receive information.
In light of these approaches, we iteratively designed BlueNavi.
2.2. Microservices Architecture in Software Development
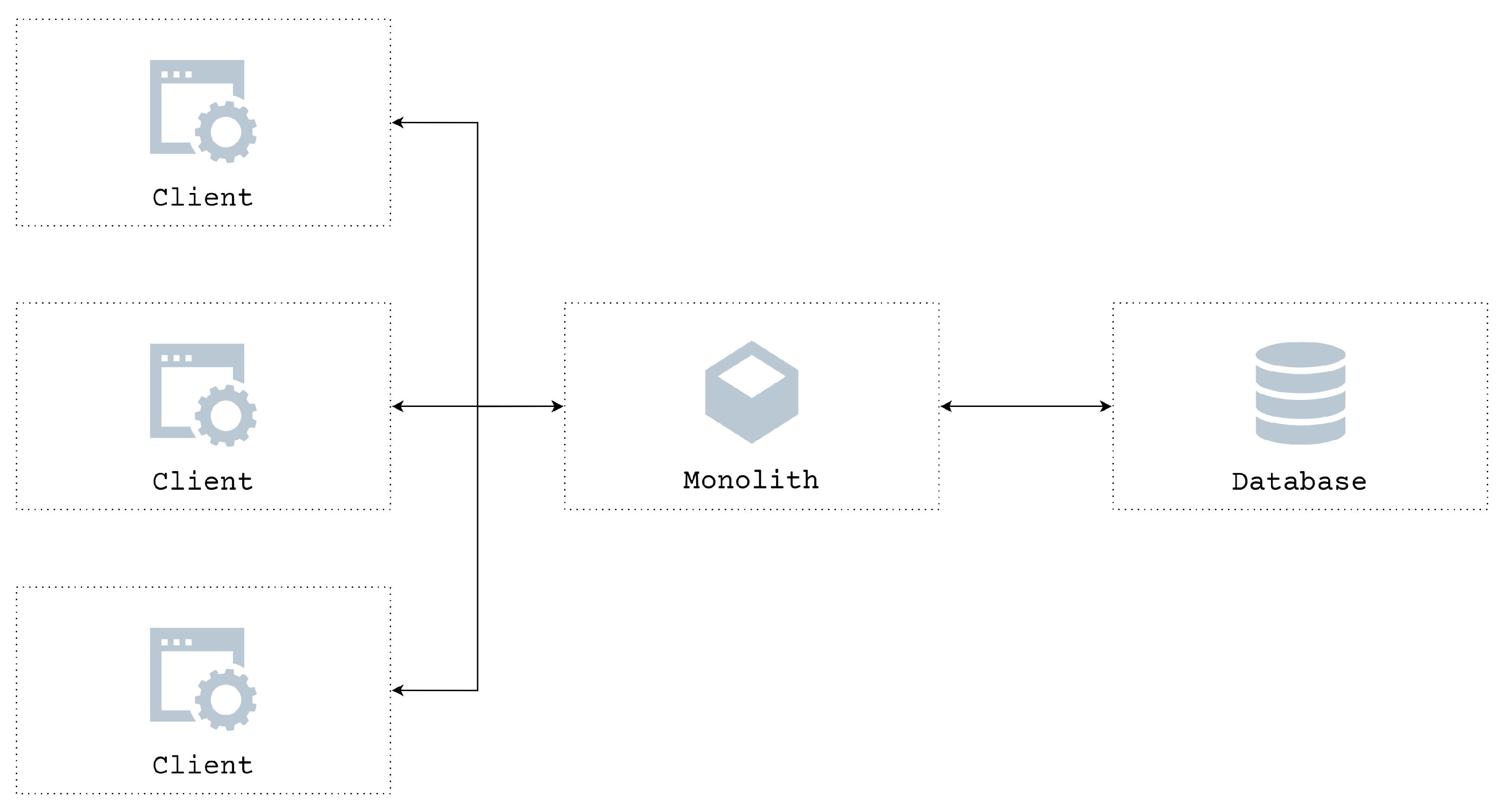
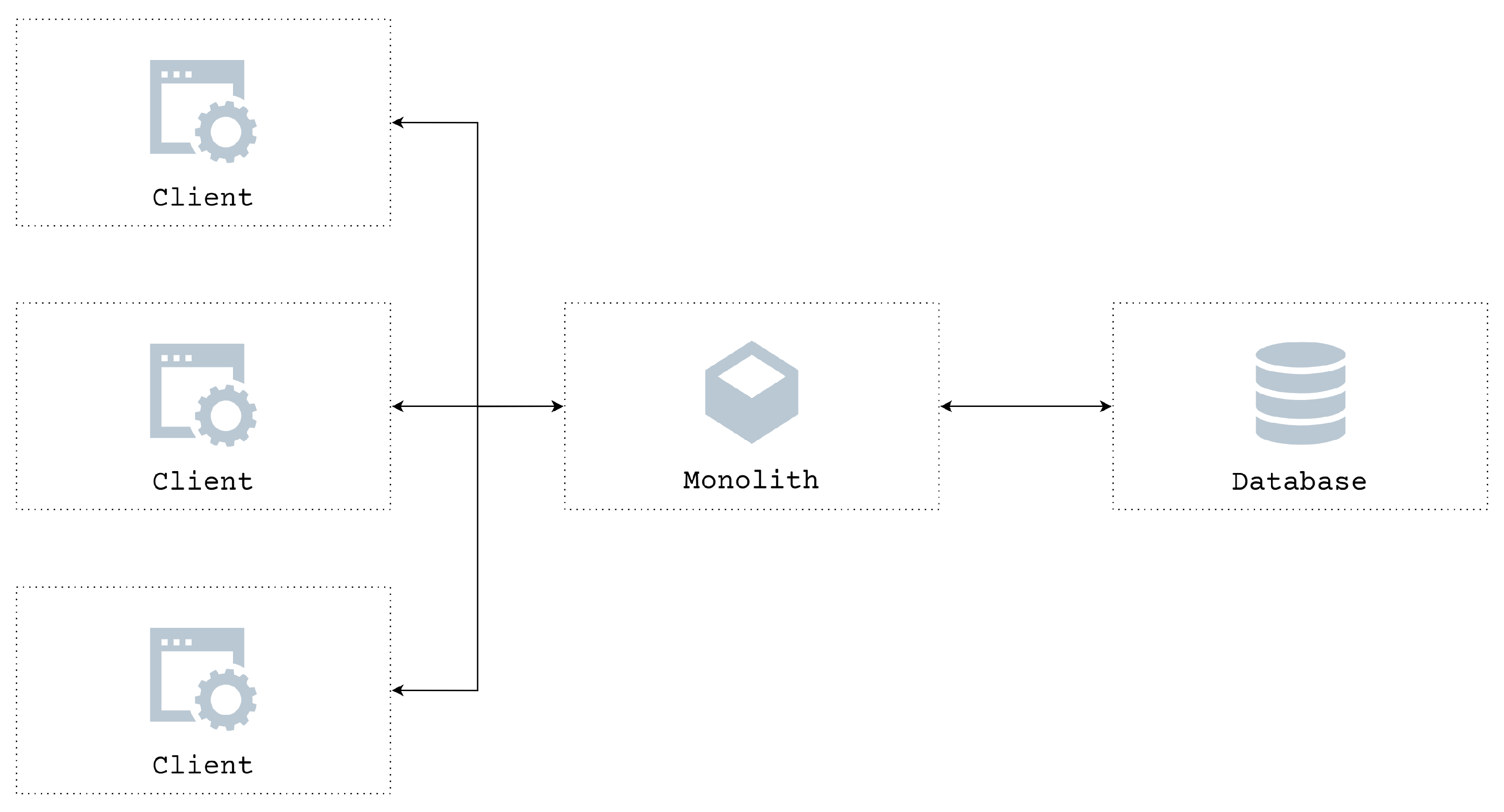
Microservices architecture is a software architecture that approaches the modularization concept and contrasts to the traditional monolithic architecture that encapsulates all the business logics in one piece and therefore makes the software system can only be deployed as a single unit [
24].
Figure 1 gives a brief illustration of a simple monolithic architecture, where everything is integrated together, packaged as a monolithic deployment bundle and communicates internally through methods such as method calls [
25,
26].
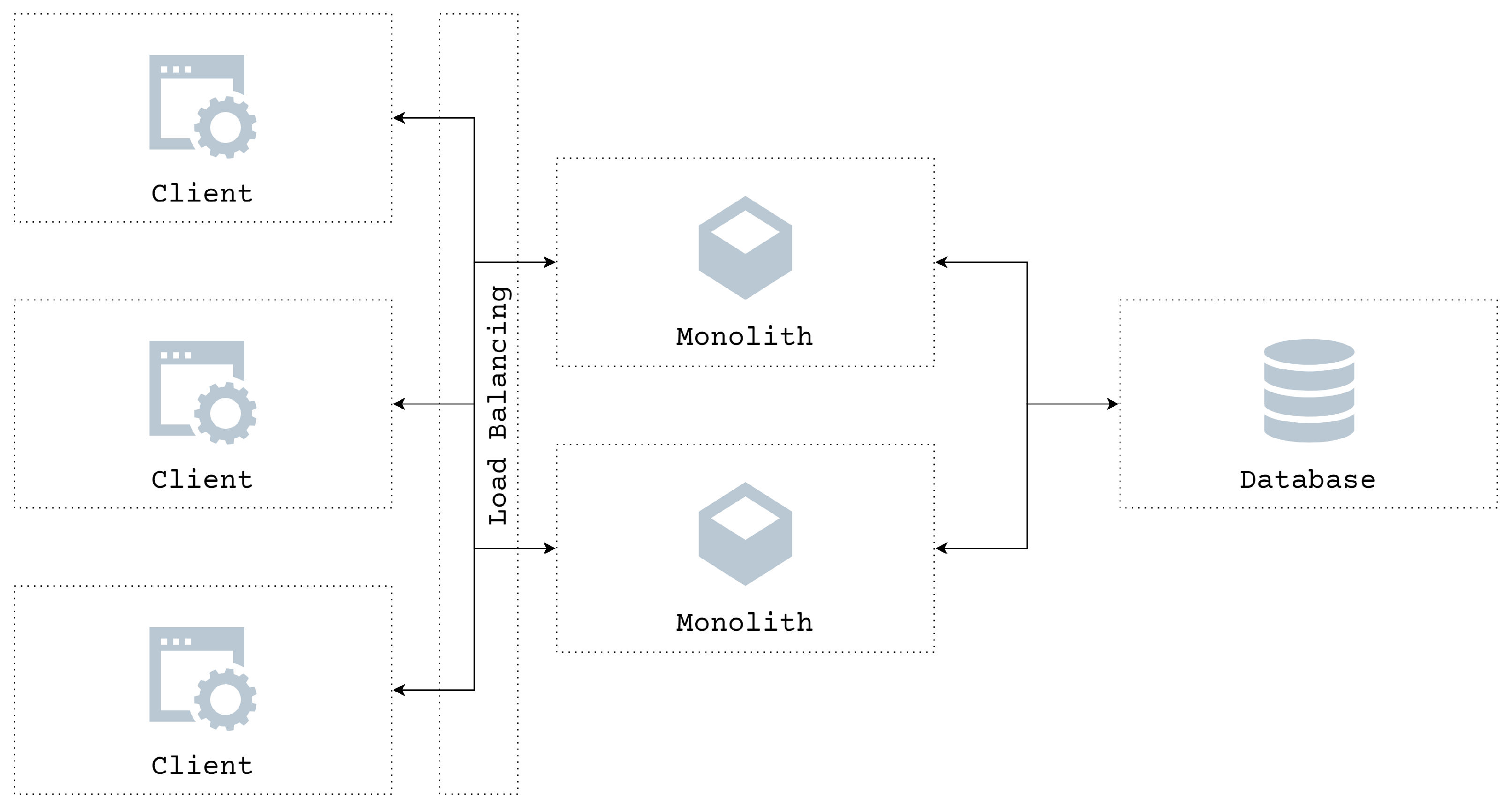
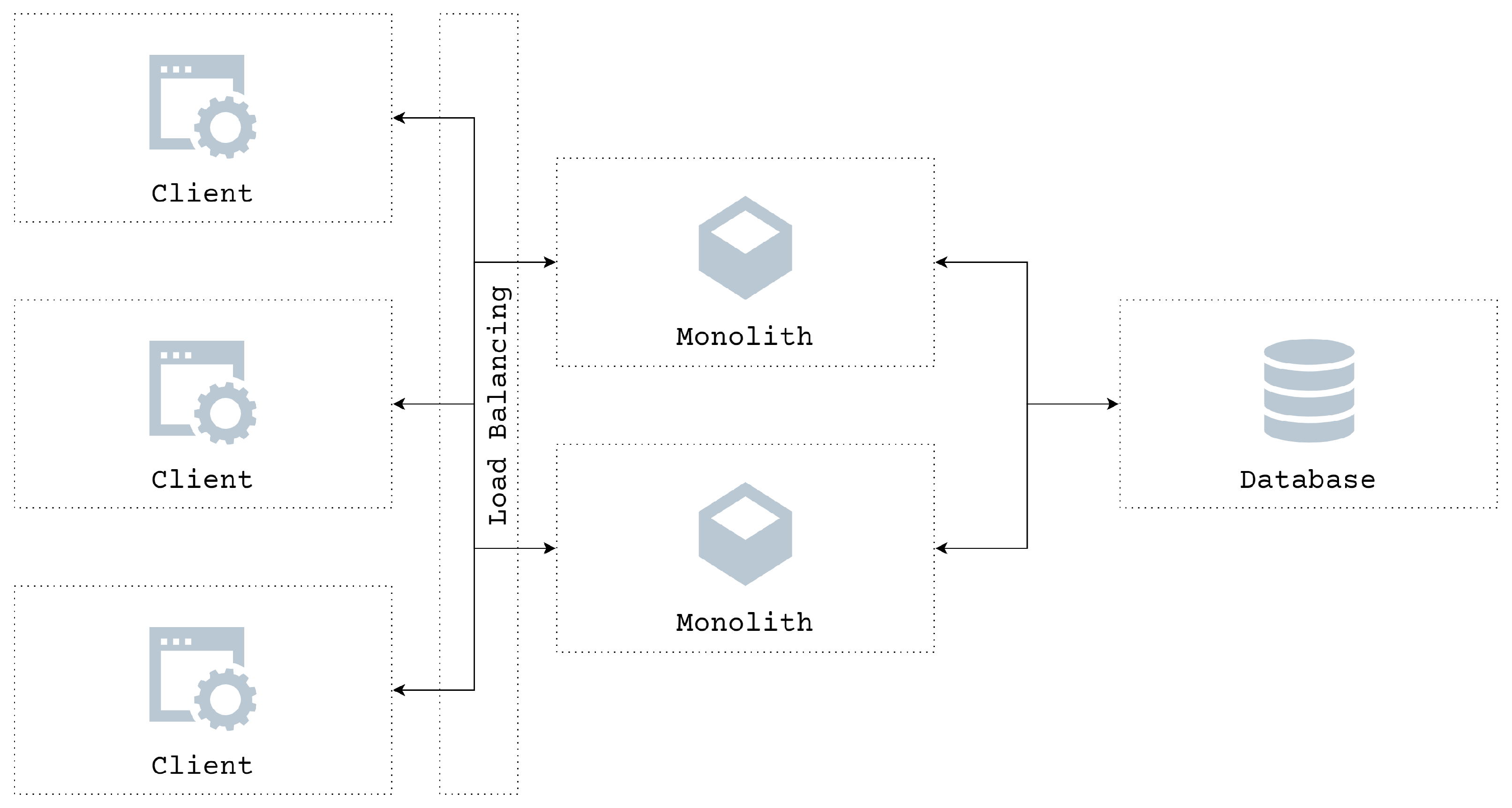
The power of a single computing component is, after all, limited. In order to solve the problem of high concurrency and high availability in the architecture, redundancy is introduced. Deploying monoliths into multiple server components with load balancing instead of just a single component spreads a large number of jobs rationally across multiple operating units for execution and, therefore, can improve the reliability of the whole system.
Figure 2 shows the illustration of a monolithic architecture-styled software with load balancing introduced.
Although software systems with monolithic architectures can also follow the modular mindset, which means that inside the monoliths, each business logic can also be structured, developed, and tested separately, they have to be simultaneously deployed to the same infrastructure, sharing the very same resources, such as central processing unit (CPU), memories, etc. Therefore, they are disadvantaged by maintainability and scalability problems [
24,
27].
The emergence of microservices architecture has alleviated those issues. A microservices architecture-based software is actually a collection of different small, well-grained, single-purpose, and independently deployed services usually divided according to the functionality. Microservices communicate via the network, using application programming interface (API) or messages [
24].
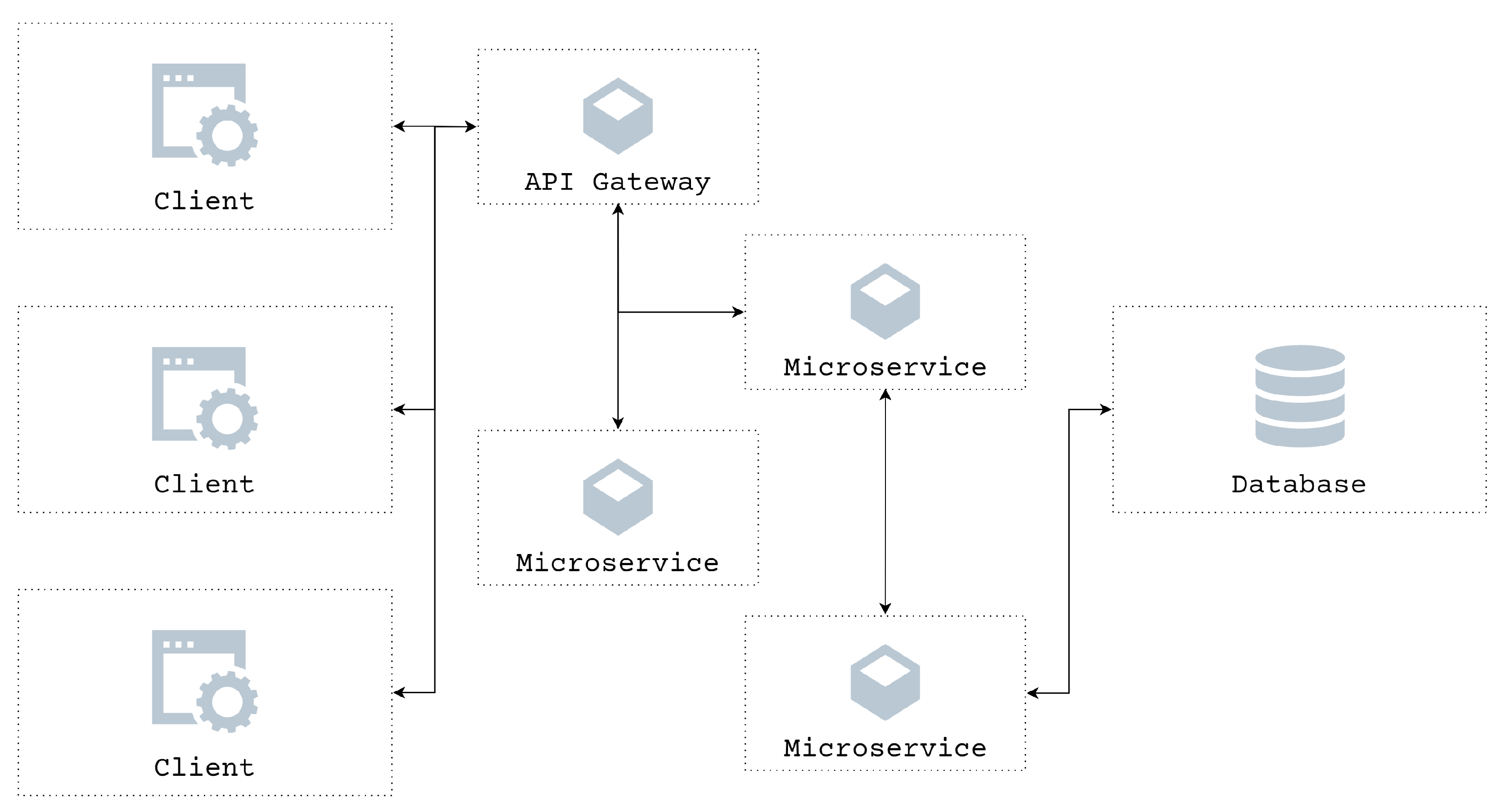
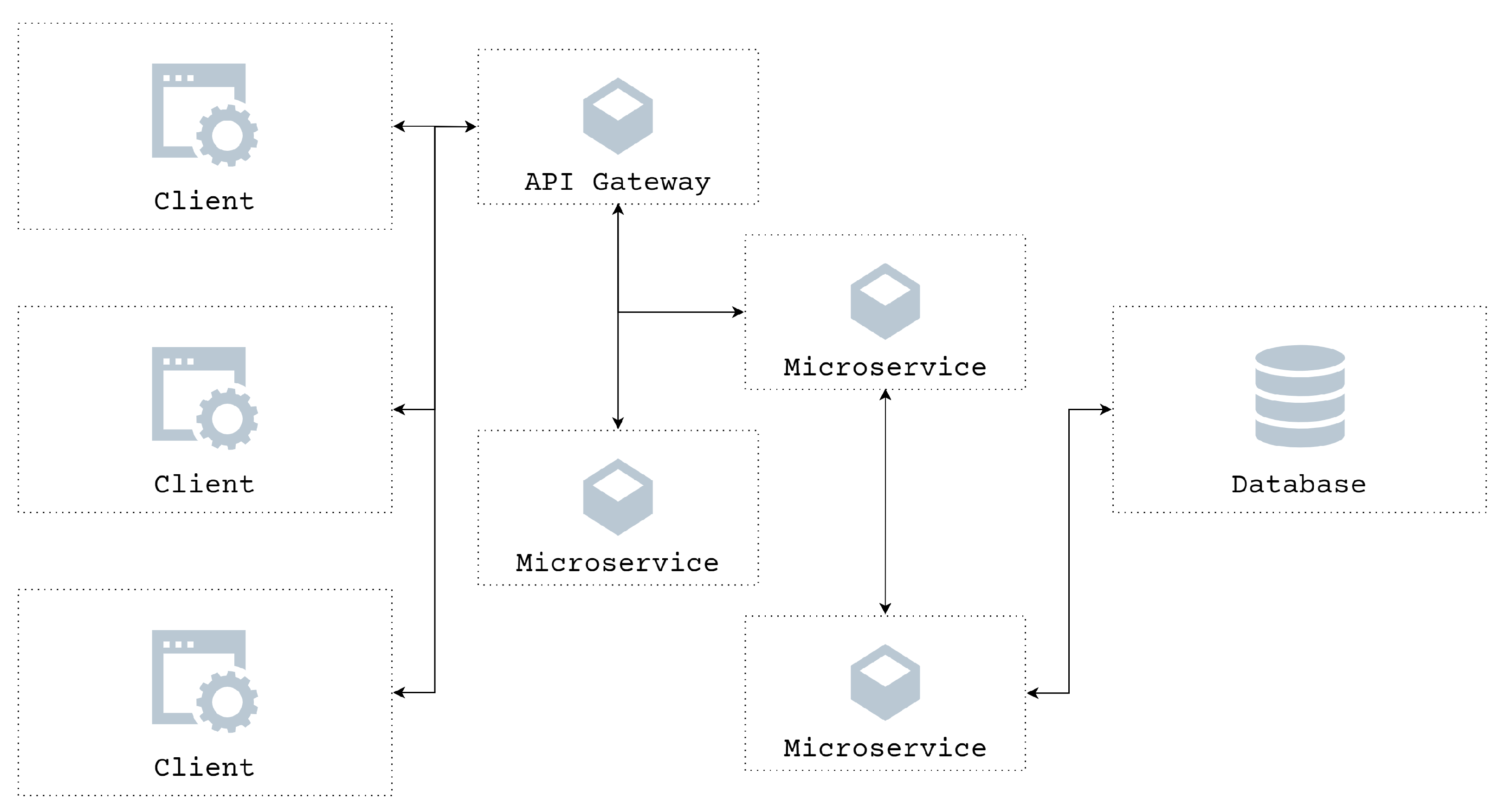
Figure 3 gives an example of the microservices architecture. In this example, the client applications communicate only with the API gateway responsible for distributing their requests to the specific microservice. Once the communication interfaces between them are well defined, each microservice can be designed, implemented, tested, and deployed independently.
The database, in this case, is deployed separately and not exposed to other microservices directly but only the responsible one. However, in some other cases, databases can also be deployed together with microservices as a part of them.
Microservices architecture has demonstrated widespread popularity because of its significant advantages in technological heterogeneity, replaceability, maintainability, scalability, and also availability.
Following the idea of modularization, well-grained microservices can be designed, developed, and deployed independently, therefore giving the developer more freedom of choice in terms of technological implementation, including the code base, platform, and the database to go with, depending on the needs. Its highly modular nature makes it easy to replace single components, even with totally different technology unless the same interface. Maintenance, by the same token, becomes easier as well. Furthermore, unlike monoliths, which have to scale everything together when the performance bottleneck is reached, microservices, on the other hand, can be scaled independently in need or only those intensely used. Moreover, the failure of one microservice usually does not cascade. The failure may not influence other parts of the remaining system for the other functions, which also helps troubleshooting [
24,
28].
Since BlueNavi is designed to have such features, the microservices architecture was chosen.
4. Implementation and Tests
We implemented BlueNavi guided by two considerations. The first one is the compatibility so that users can use existing equipment on board, including the AIS equipment and computers that can serve as the BlueNavi operating environment, as much as possible. The second consideration is the accessibility so that the BlueNavi App is available regardless of the device, including mobile phones, tablets, laptops or desktops, and the operating system, such as iOS, Android, Windows, Linux or Mac OS.
4.1. Implementation
To ensure compatibility, microservices are deployed using Docker, which enables them running in a loosely isolated environment, less dependent on the given host [
31].
For the ship station, we deployed all the necessary microservices on a Raspberry Pi connected to AIS Class-B equipment via wireless network. Due to the cost advantage of Raspberry Pi compared to other computers, the solution can be implemented at a lower cost for small ships. In order to test whether the system can also work well on different platforms, in addition to the Raspberry Pi with its ARM architecture and UNIX-like operating system, we also deployed the same microservices on a Windows laptop with x86 architecture. Both of these ship station platforms were used in the live-ship tests.
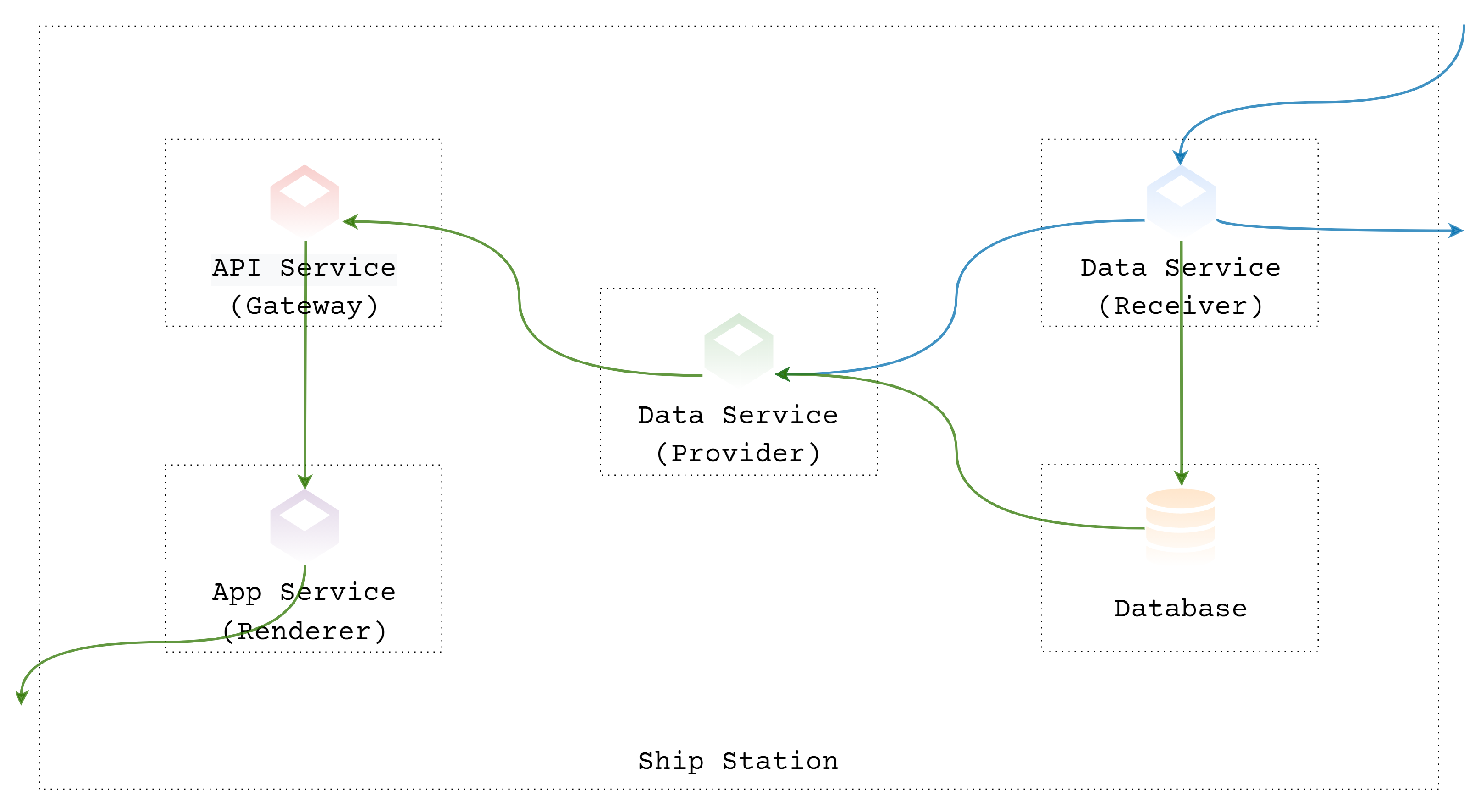
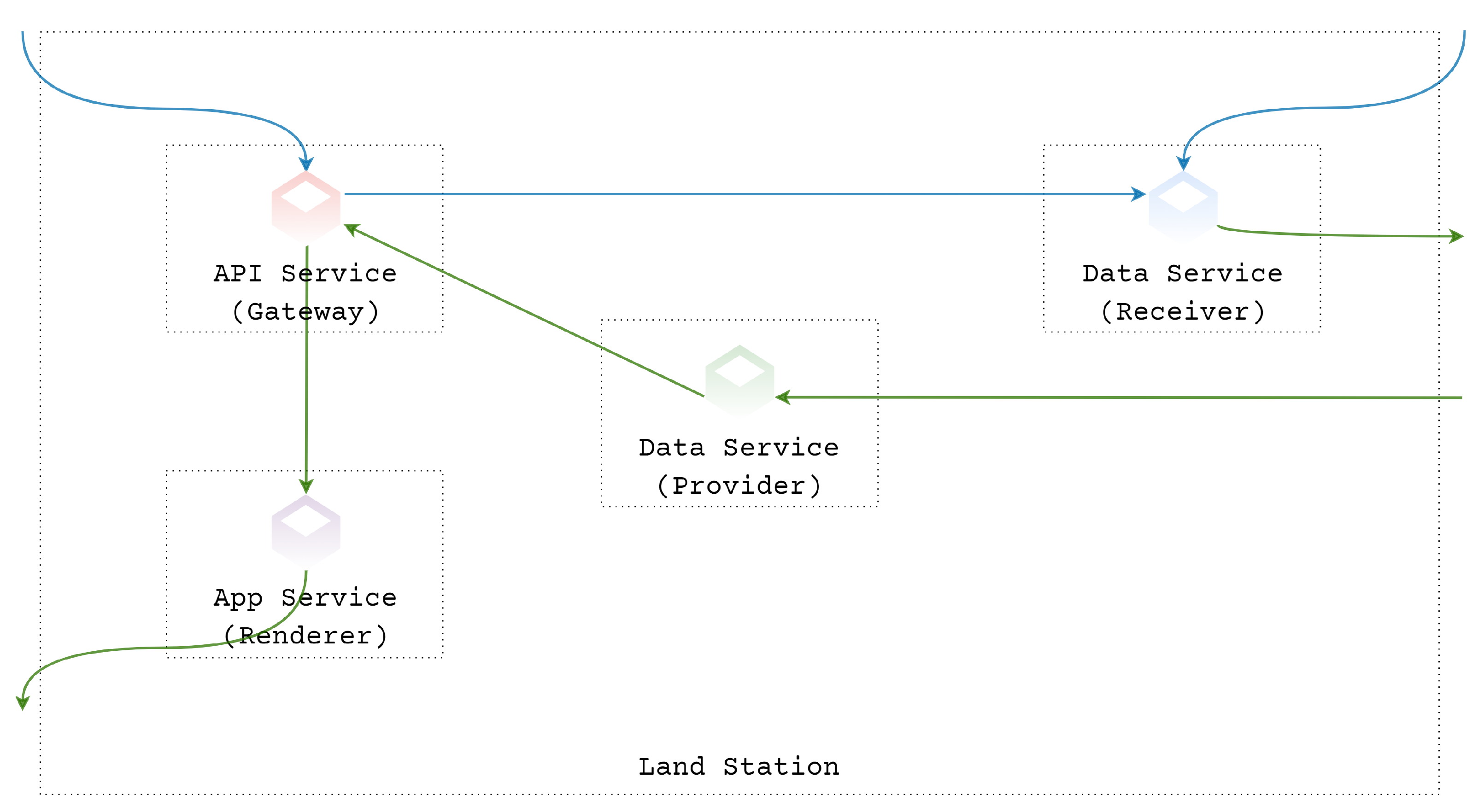
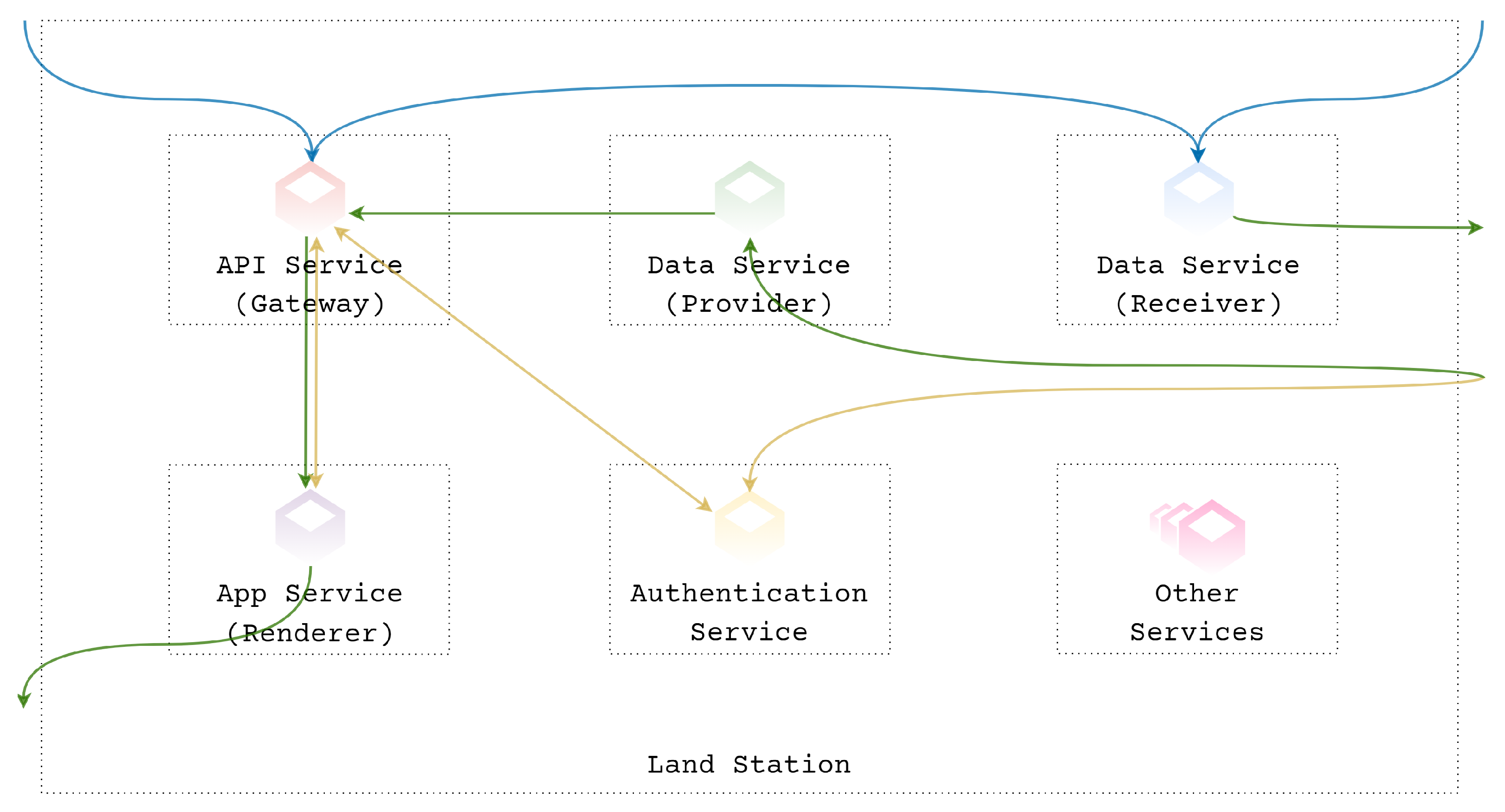
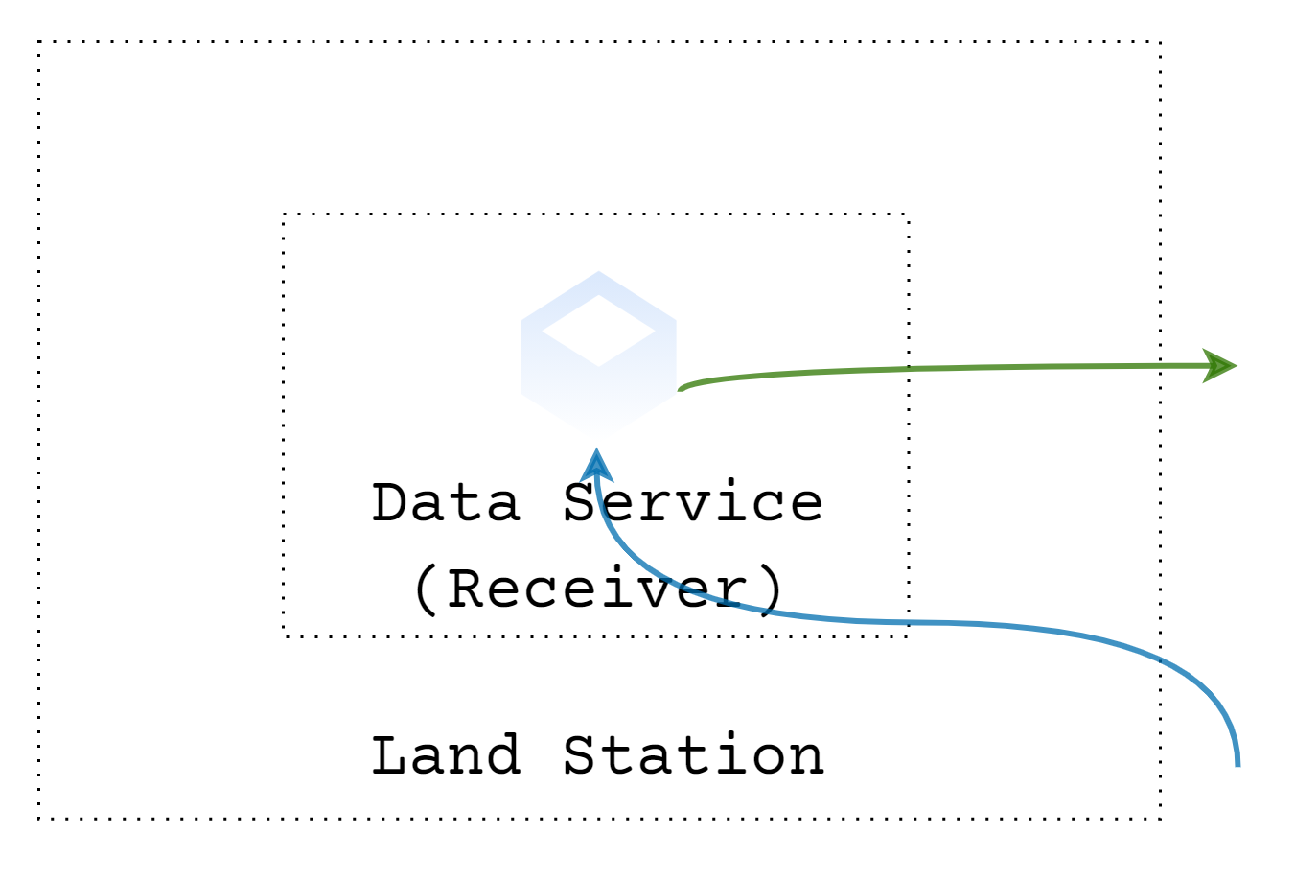
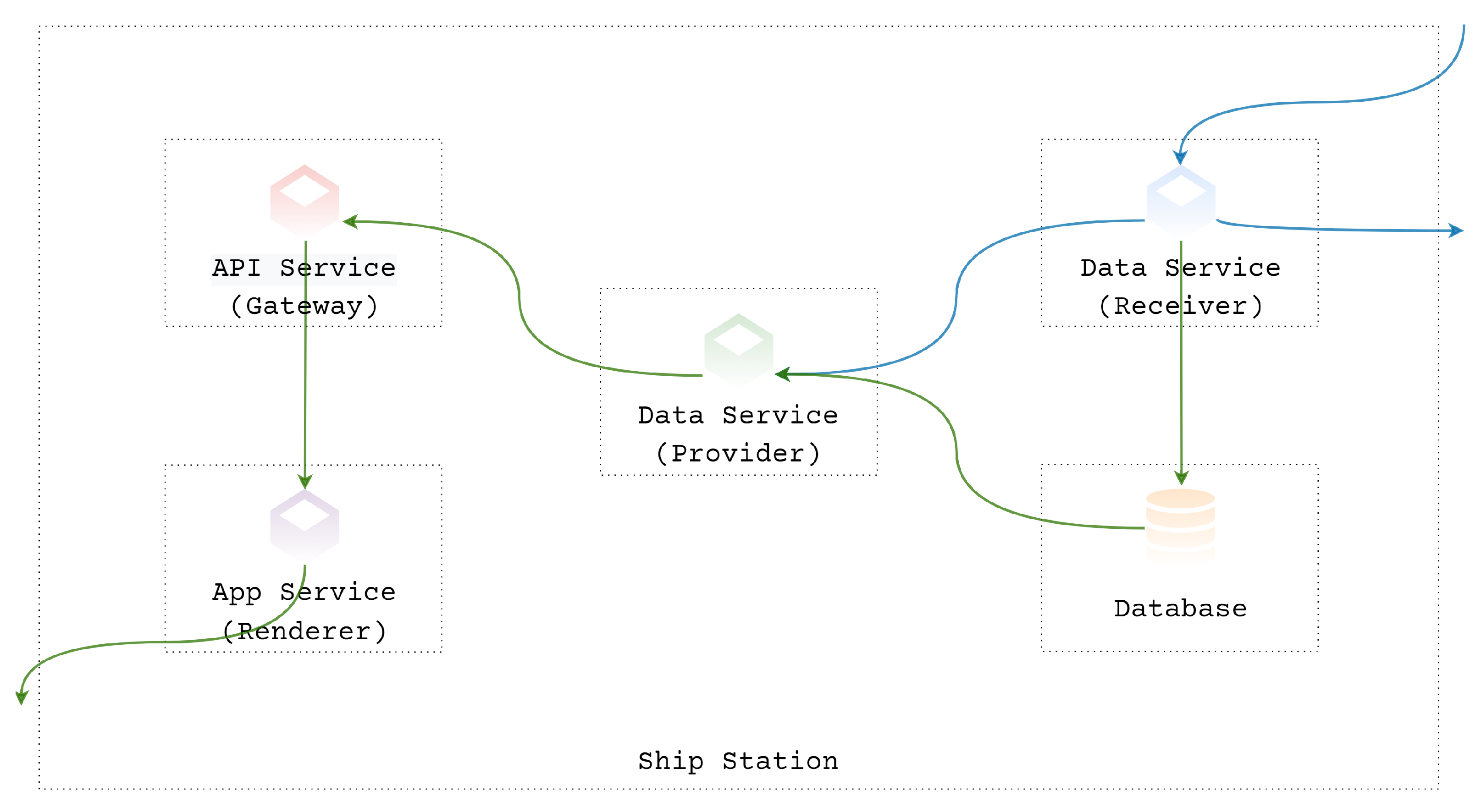
For the land station, we deployed one data service (Receiver) in our laboratory located in Kobe, Japan, connected to the laboratory’s AIS receiving equipment as the land station’s data source. In addition, due to performance and network bandwidth reasons, we deployed the rest of the necessary microservices on a server located in Tokyo, Japan, to be able to serve users in unspecified geographic areas better. Here, different components of the land station are deployed in different places to meet different needs, which is one of the advantages of the microservices architecture.
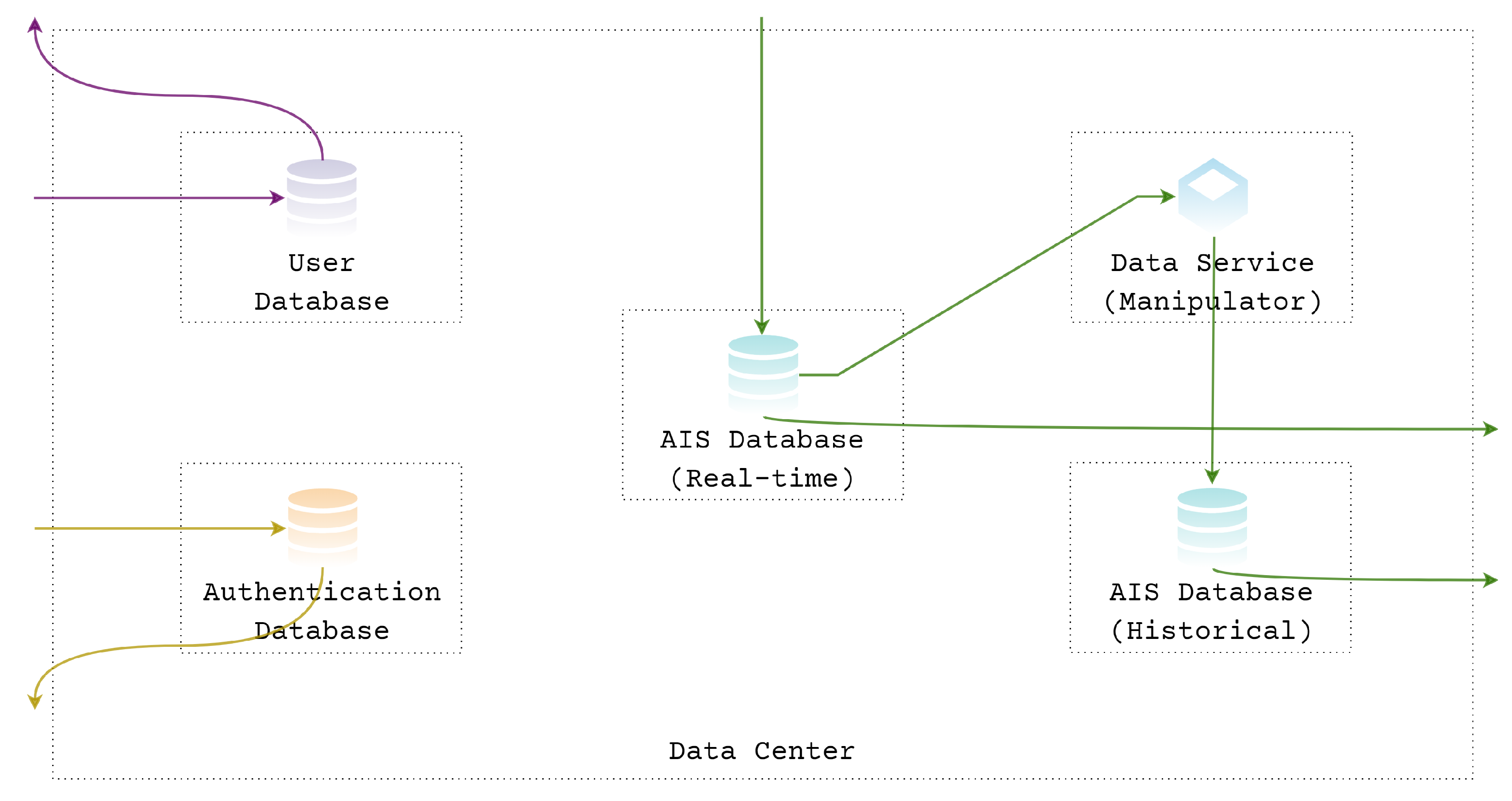
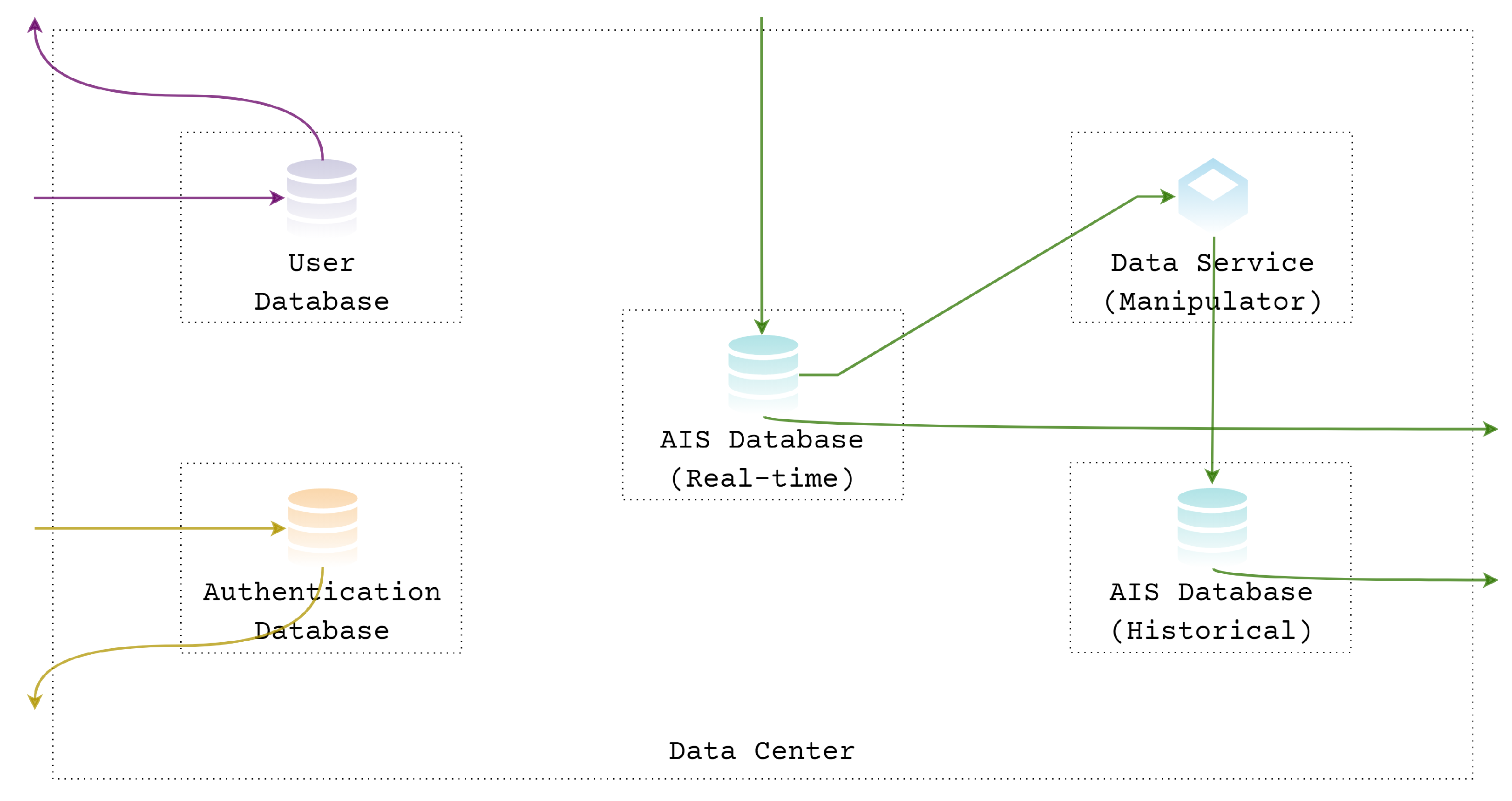
The data center is also located in Tokyo and is deployed separately from the land station. The database is only accessible to related microservices on specific ports for security reasons.
The BlueNavi App provided by the app service (Renderer) uses web development technology, built with Angular, TypeScript, HTML, and CSS, and can run on most modern browsers, including Chrome, Safari, Firefox, and Edge. Most of the microservices were developed using Node.js and JavaScript, and some with Go as well. Due to AIS data characteristics [
32], the MongoDB NoSQL database was chosen to store the parsed AIS data.
4.2. Land Test
In the land test, we simulated the situation where a ship is not equipped with AIS and can only access the data through the BlueNavi App provided by the land station via the internet, and for situations where the Vessel Traffic Services (VTS), ship company, port administration, and other general users obtain AIS data on land.
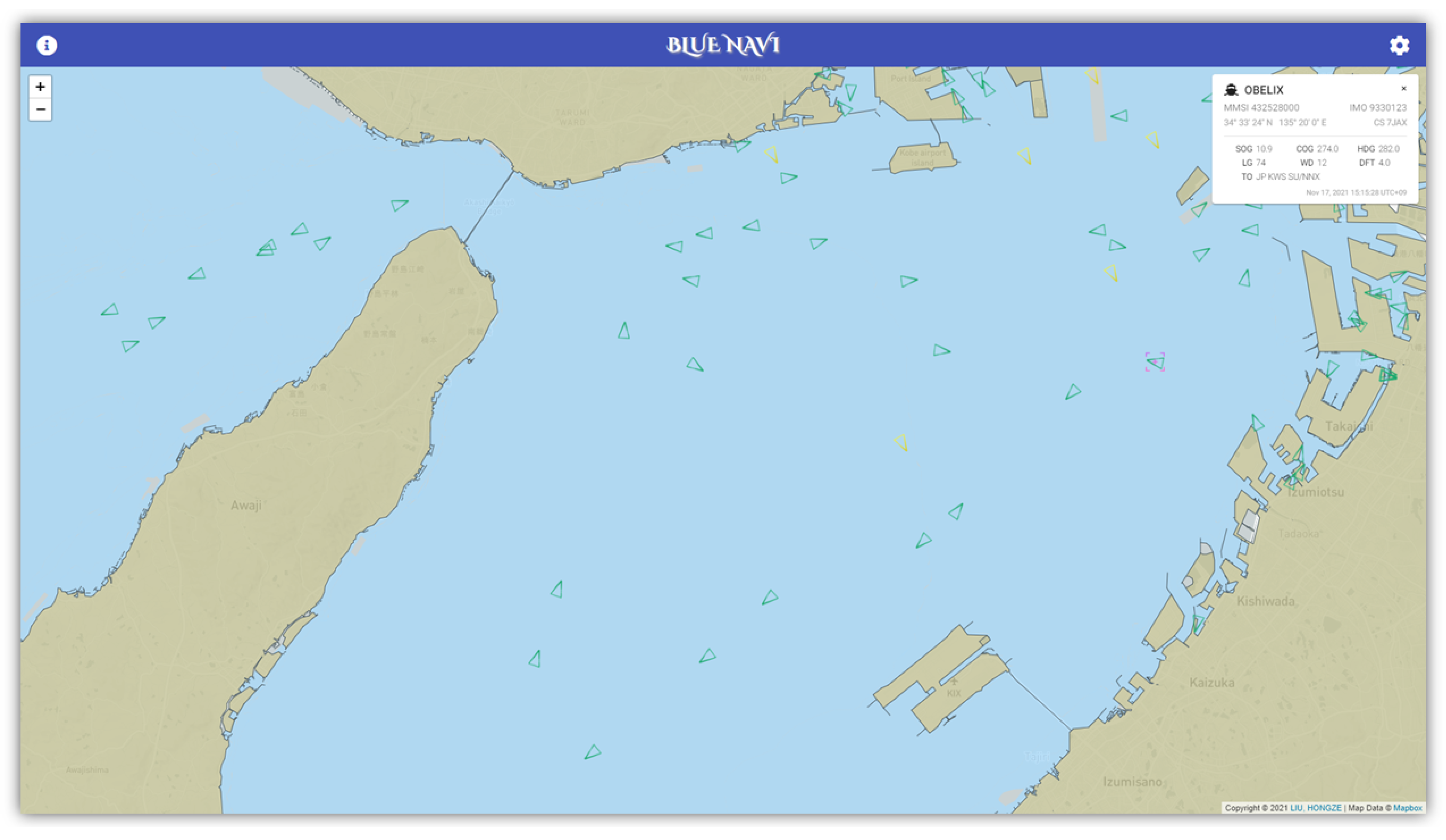
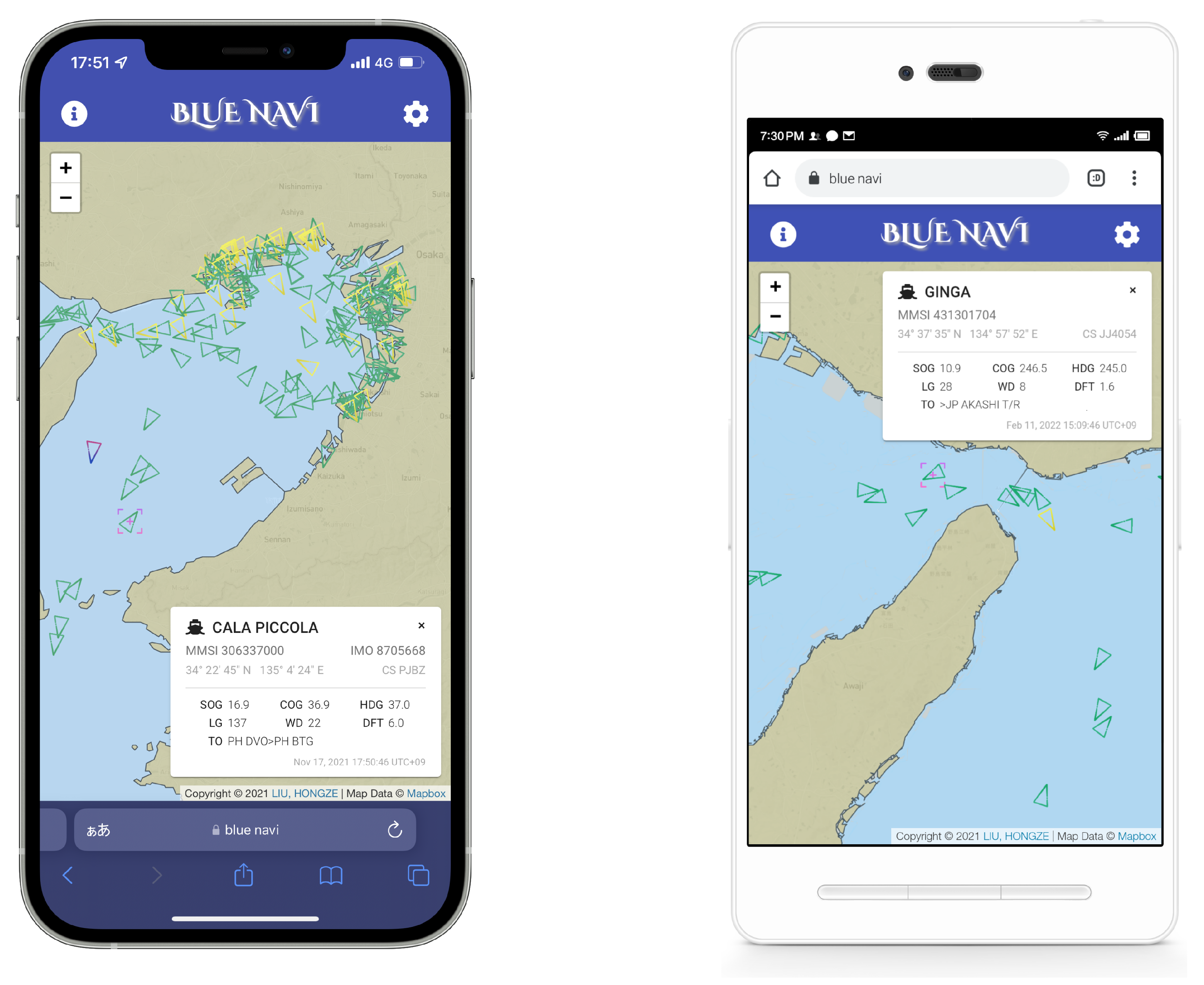
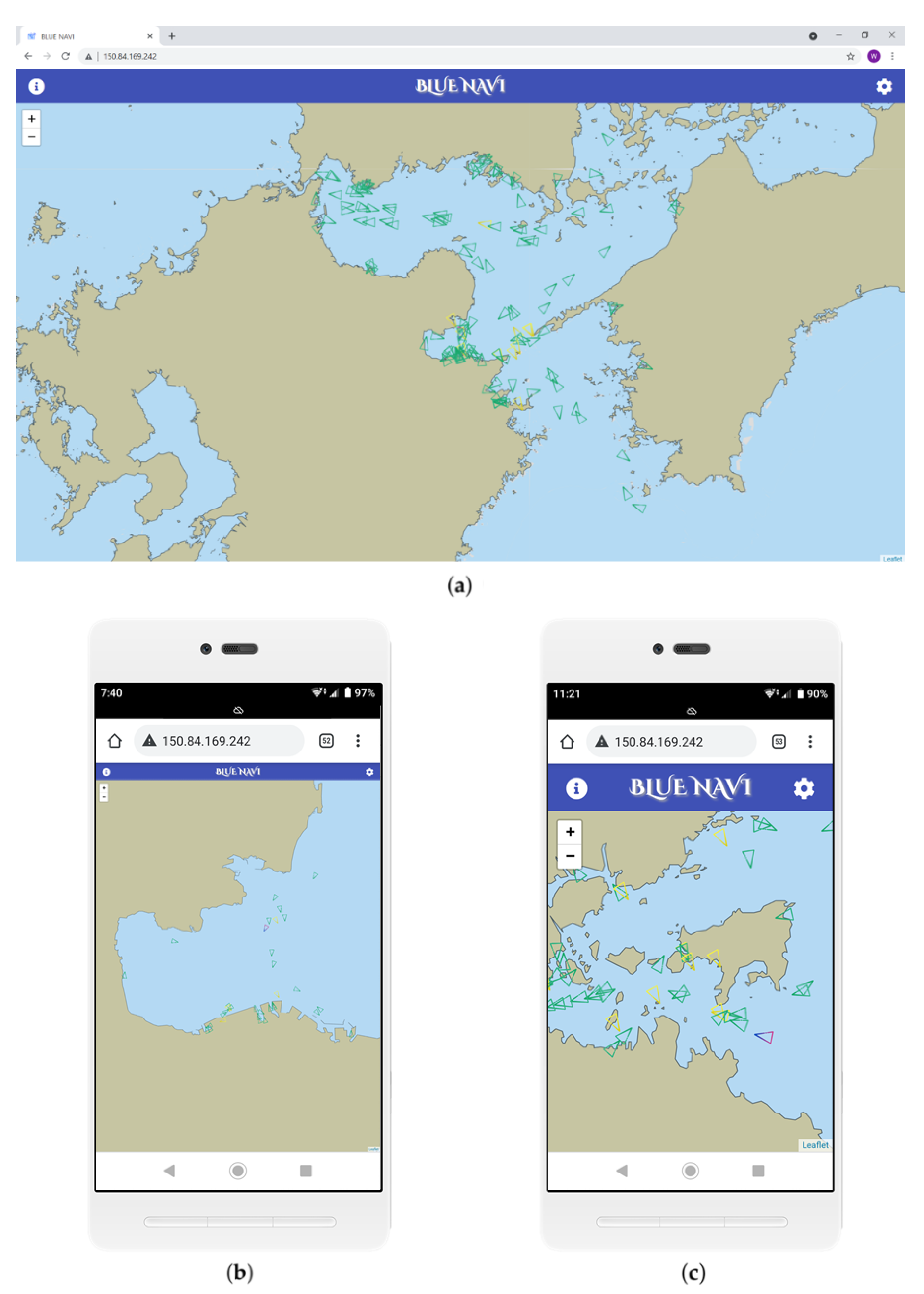
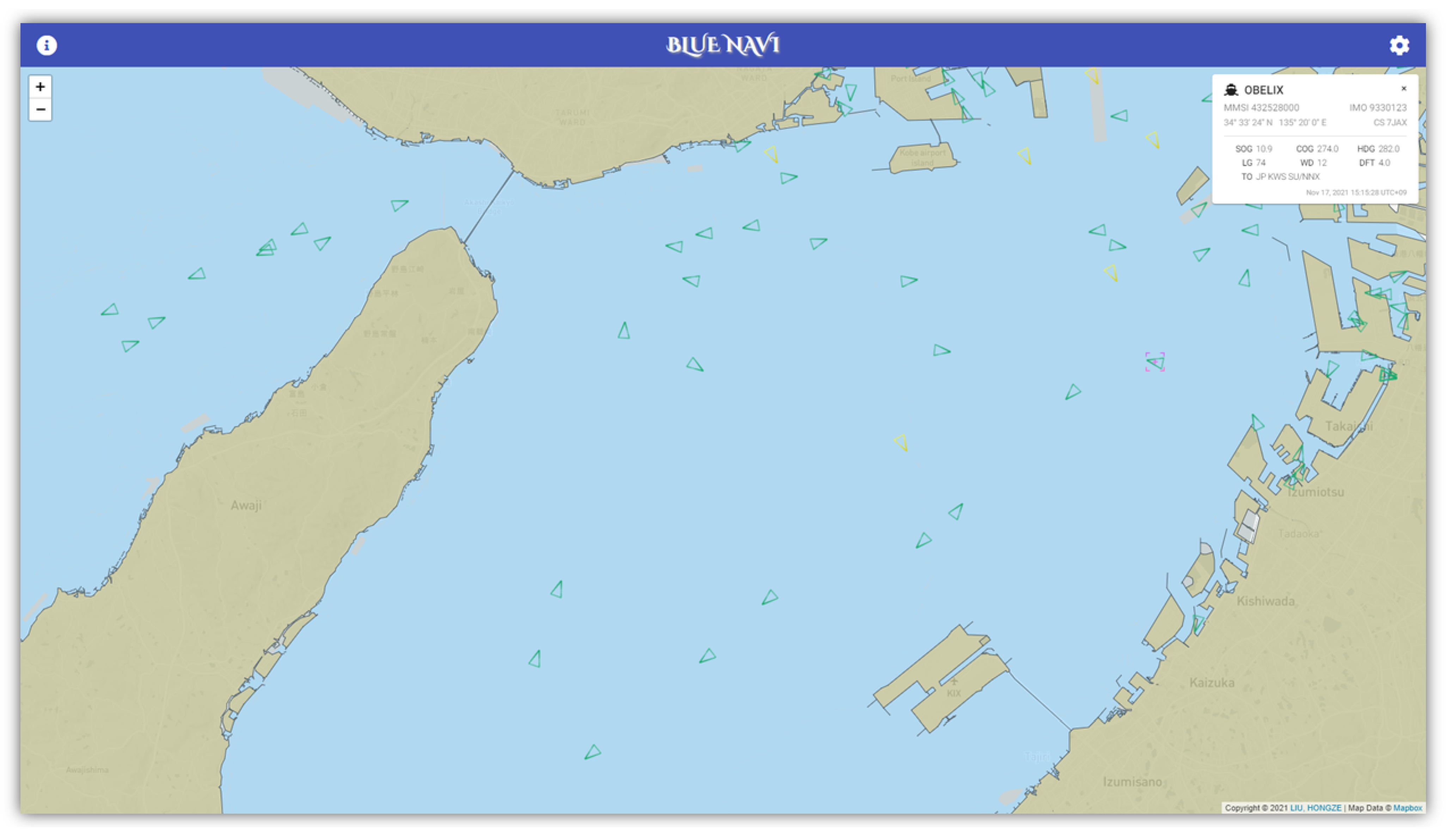
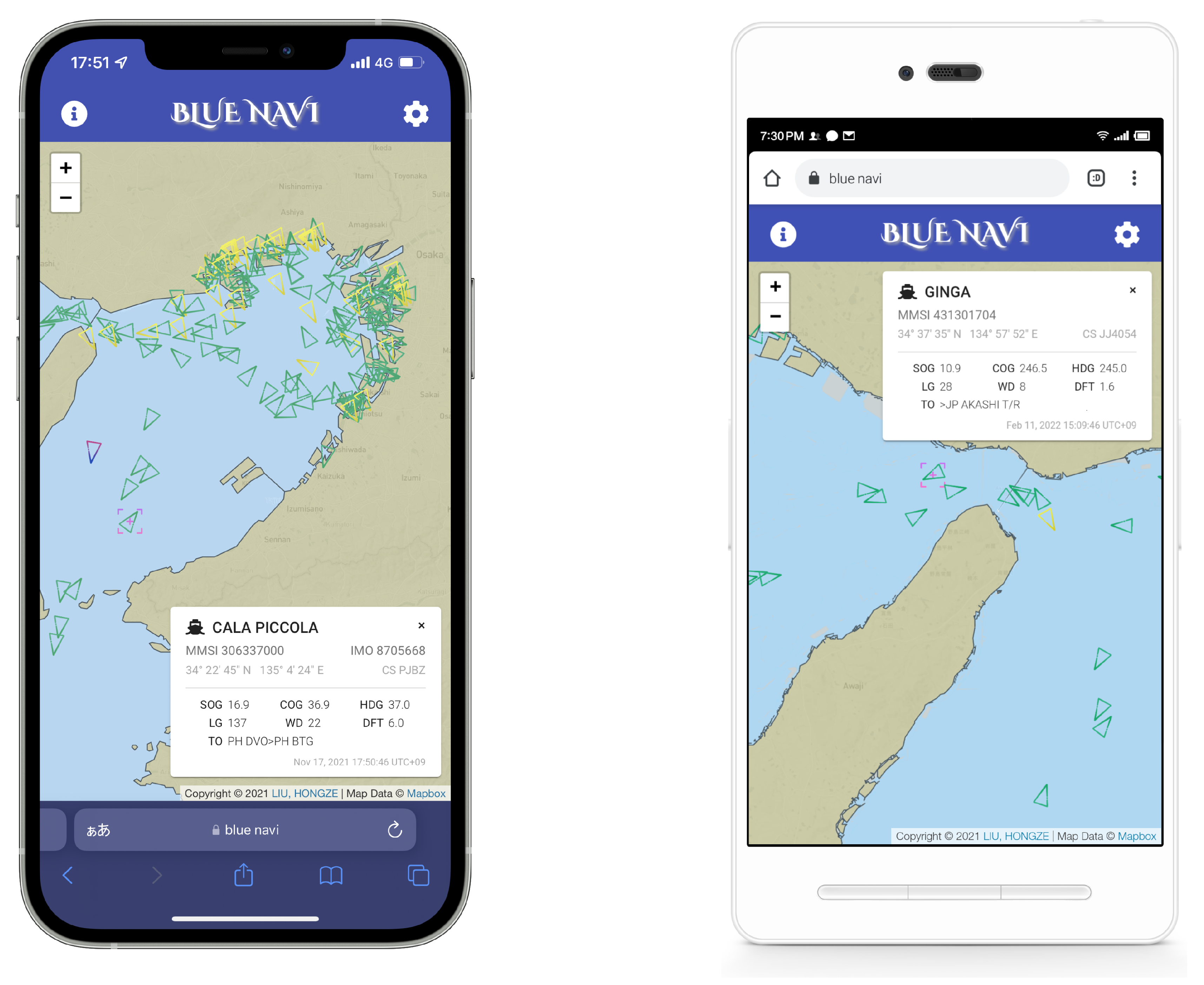
Figure 10 and
Figure 11 show the screenshots of the BlueNavi App running on both the laptop and the mobile phones during the land test. Chart data from the Hydrographic and Oceanographic Department, Japan Coast Guard, and map data provided by different online map providers were appropriately fused. Navigational information received by the AIS equipment in the land station is accurately parsed and represented on the map. Users can click on the small triangular icons in green (stands for data coming from Class-A AIS) or yellow (from Class-B AIS) representing vessels, and then more specific dynamic, static, and voyage-related information are displayed in the form of cards in the upper right corner. Users can also drag and drop the cards to any location within the map area, as shown in
Figure 11.
In other words, for services provided by the BlueNavi land station, users only need a device with a modern browser and an internet connection, whether on board or on land.
4.3. Live-Ship Test
We also conducted two live-ship tests for BlueNavi. The first test was performed on the training boat,
Hiyodori, Tokyo University of Marine Science and Technology, and the second test was conducted during the last research navigation of the Kobe University training ship,
Fukae Maru. In the first test, we simulated the scenario of installing a Class-B AIS on small vessels which are not mandated. In the second test, we simulated the scenario of introducing BlueNavi to a ship already equipped with AIS.
Figure 12 shows Hiyodori and the first live-ship test.
Figure 13 shows Fukae Maru and the second live-ship test. BlueNavi ship stations were running on the Raspberry Pi, and the BlueNavi App can be accessed from anywhere on board.
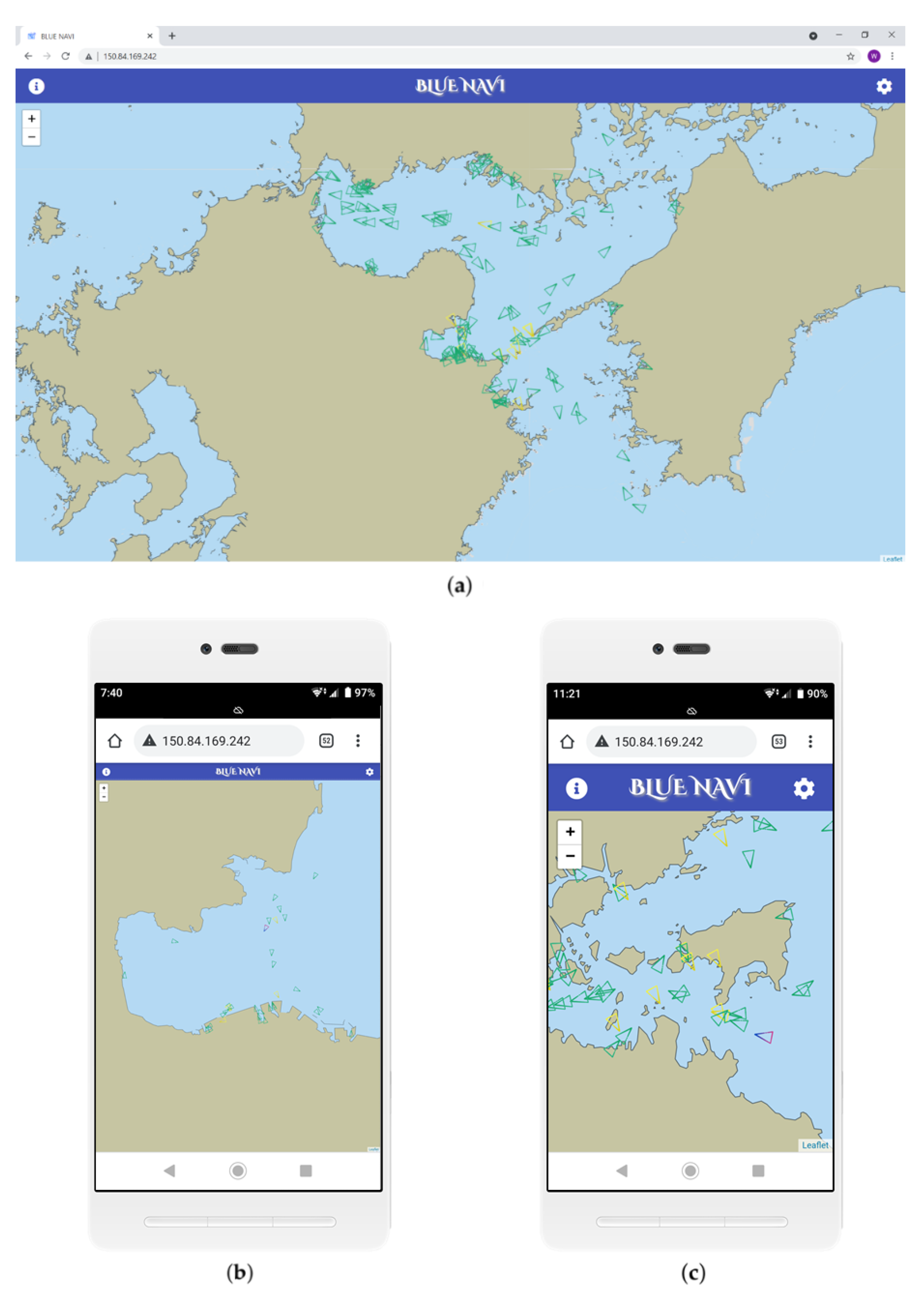
Figure 14 shows the screenshots of the BlueNavi App provided by the ship station. Information received by the shipborne AIS equipment is accurately reflected on the user’s terminal.
5. Discussion
AIS is considered to be an ideal source of information for safe navigation. AIS greatly improves navigation safety by providing information regarding surrounding vessels in real time. However, not all ships are mandated to have AIS installed. In addition, in order to have visual access to navigational information, expensive ECDIS is often required in addition to AIS equipment. These problems prevent many smaller vessels from obtaining and utilizing AIS data. Moreover, for ships currently equipped with ECDIS, the OOW can only operate the system from its position to access information.
Our microservices architecture-styled BlueNavi platform has virtually solved these problems. BlueNavi consists of ship stations, land stations, and data center. Depending on the needs of different users in different scenarios, they can be introduced independently or in a combined way.
5.1. Working Range
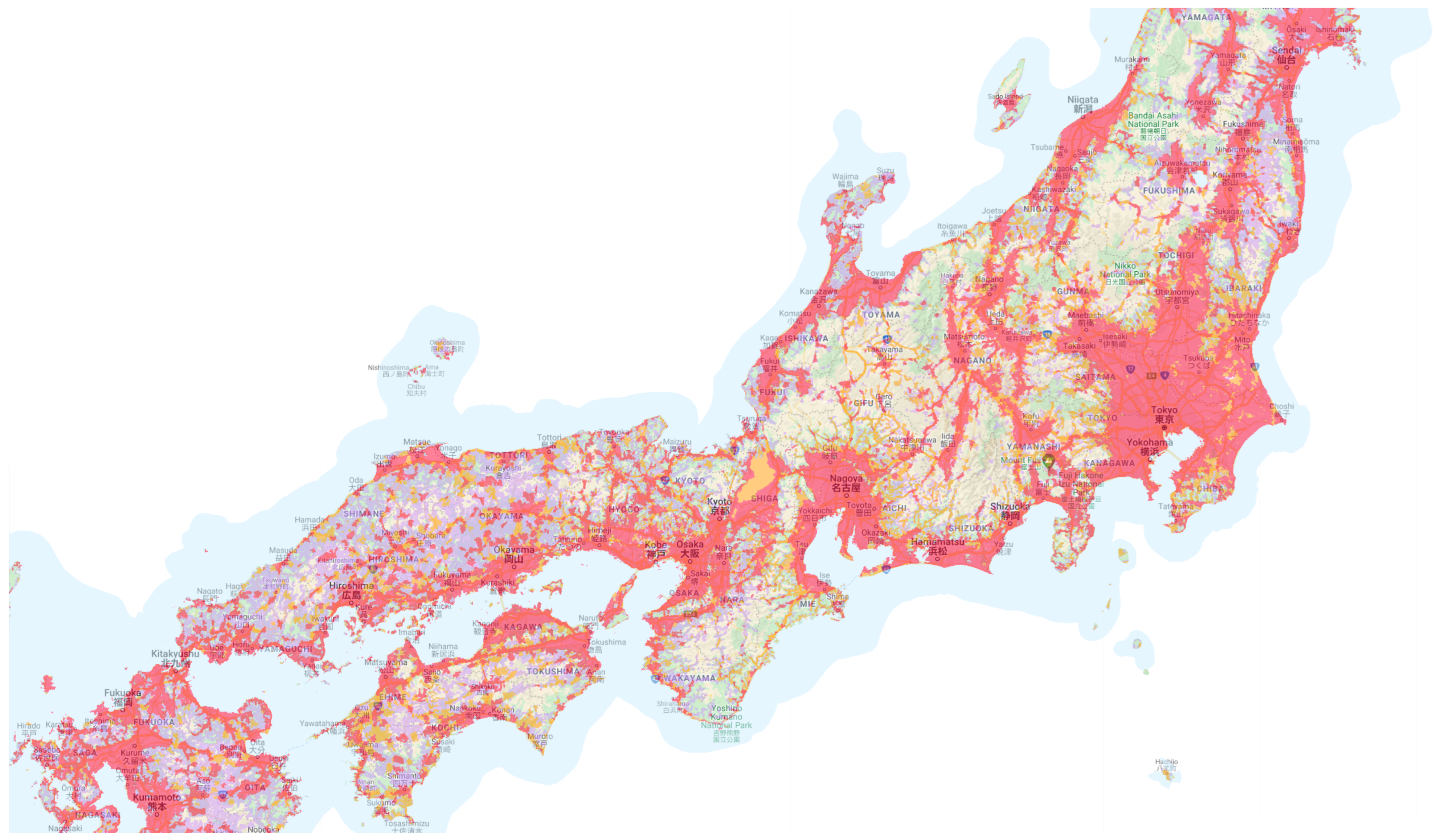
Users of fishing boats, yachts, and other small vessels that do not wish to add any additional equipment can use data collected by other stations and stored in the data center, as well as services provided by land stations as long as they have access to the internet. In this case, the working range of BlueNavi depends on the coverage of the internet at sea, that is, the range of radio waves that can be received between a base station installed on land and a terminal such as a mobile phone.
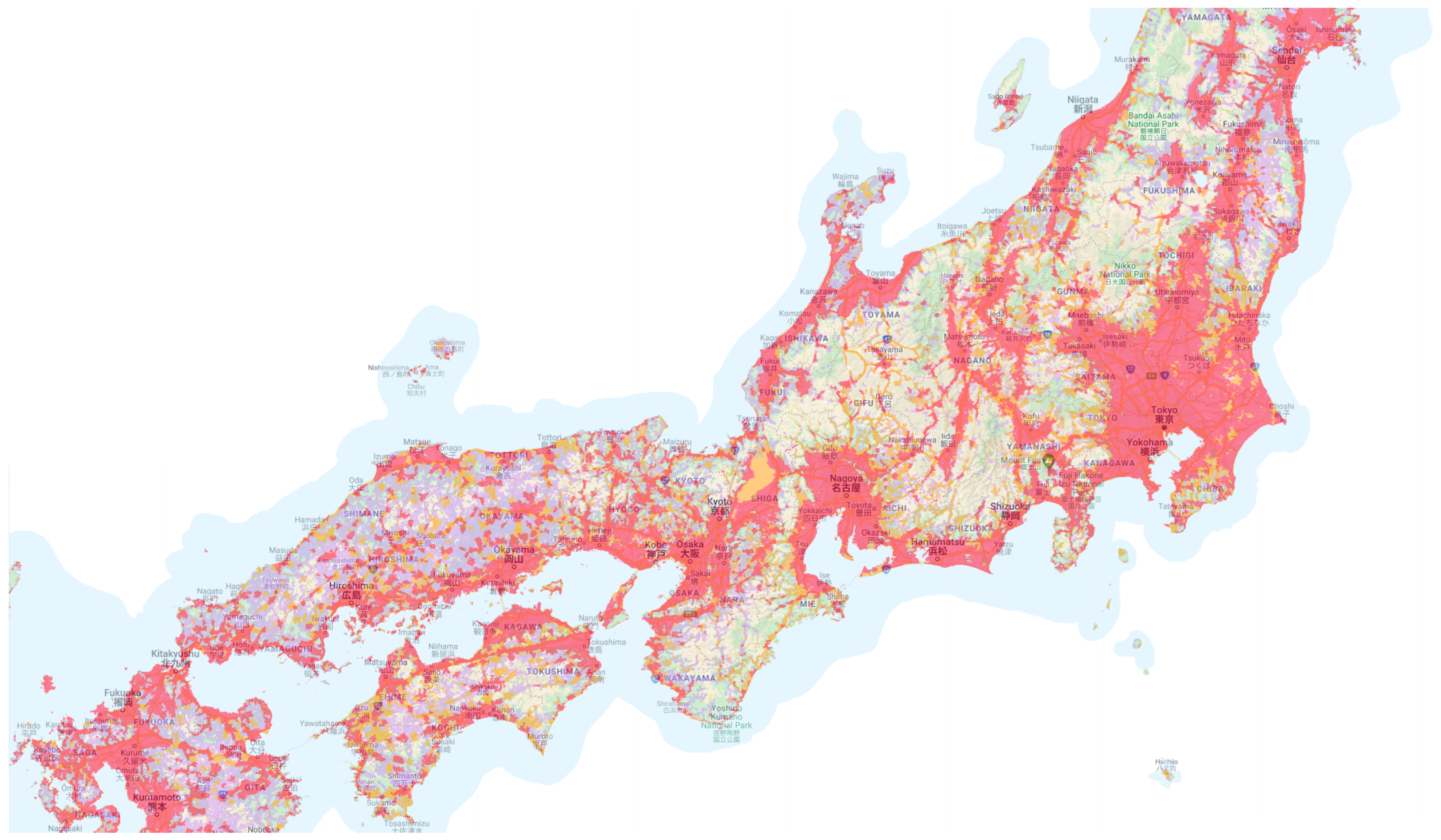
Figure 15 illustrates the internet coverage of NTT DOCOMO, a Japanese operator whose mobile internet service is available at sea [
33]. As can be seen from the figure, in Japan, internet service is available within about 10 nautical miles of the sea (areas in Alice blue), which already exceeds the maximum navigable waters range, 5 nautical miles offshore, for
small coastal vessels defined by the government.
For small vessels that do not have access to the internet or do not want to rely on the internet in order to obtain navigational information, it is possible to retrofit both AIS equipment and a BlueNavi ship station on such vessels. For large ships and passenger ships where AIS is mandatory, BlueNavi is compatible with all Class-A or Class-B AIS equipment. In both cases, BlueNavi has the same horizontal working range of about 40 nautical miles from the ownship as the existing AIS equipment.
5.2. Costs
BlueNavi also has a major cost advantage.
Table 1 shows a cost comparison of shipborne equipment between BlueNavi and traditional solutions. The aforementioned scenario that relies entirely on services provided by land stations and the internet is denoted as BlueNavi 1. The scenario that ownship already equipped with AIS is denoted as BlueNavi 2. Scenarios that need equipping AIS Receiver or Class-B AIS are denoted as BlueNavi 3 and 4, respectively.
Compared with the Class-A AIS plus ECDIS solution (denoted as Traditional) widely adopted by large ships, BlueNavi can serve at a relatively low cost, when not considering the user terminal (usually smartphones, tablets, or laptops, which we default to users already owning) costs, the internet usage costs (which vary by country, region, and communication carrier and are relatively not very expensive), and the cost of land station and data center constructions.
5.3. Development and Deployment
Since BlueNavi uses microservices architecture, it has advantages over traditional monolithic architecture in both development and deployment. For example, both ship and land stations need a data microservice to process messages from AIS devices and also an app microservice to provide applications to the user. It is sufficient to develop these microservices once and then deploy them in different ship and land stations, instead of developing two single monolithic systems with overlapping functions and codes for both ship and land stations. In addition, BlueNavi is an easy-to-maintain platform. When a service inevitably encounters a problem, only the related microservices need to be shut down, without affecting the remaining system.
The independent nature of microservices also determines that BlueNavi is a highly scalable platform. When demand for a specific function and concurrency increases, it can be scaled up in a targeted manner, such as expanding the server capacity. Furthermore, in terms of functionality, we can design and implement new features for BlueNavi just by deploying new microservices.
5.4. Compatibility and Availability
In addition to the station being compatible with all kinds of shipborne AIS devices, the station itself can also run on almost all kinds of hosts, from a small Raspberry Pi to a server. Moreover, the adoption of web application development technology makes the BlueNavi App available from almost all smart devices as well. Under the same local area network (LAN), users can access BlueNavi’s services anywhere on bridge or board, no longer limited to some fixed position, such as where ECDIS is located.
6. Conclusions and Future Work
In this study, we investigated issues regarding the lack of standard AIS which provides ship identification and other maritime information on vessels where it is not mandatory. We surveyed the literature to examine the AIS carriage rates in different sea bodies. Based on our findings and analysis of probable user scenarios, we designed and developed BlueNavi, using microservices as the architecture to make the platform solution not only capable of meeting the goal of enhancing marine navigation safety but also sustainable throughout future upgrades and process developments. We also designed and developed an interface for BlueNavi using the latest web development technologies to visualize and enable users to interact with data. We were able to deploy BlueNavi to conduct both land and live-ship tests. Our tests demonstrated BlueNavi’s efficacy in providing a channel for vessels without AIS to make use of AIS data at a low cost and hence improve the safety of navigation. We also discussed how BlueNavi could be integrated into current AIS-equipped vessels to possibly expand its functionality.
The main purpose of AIS is to identify ships, and the information is mainly about the ships themselves. On the other hand, in coastal areas where internet access is available, various other kinds of information can also be obtained. Weather conditions, sea conditions, and other information can also be integrated with BlueNavi by continuously developing and launching new microservices. For example, Maritime Safety Information (MSI) is also crucial to the safety of navigation. At present, MSI along the coast is mainly available to ships by Narrow Band Direct Printing (NBDP). Our previous research explored the MSI classification problem through machine learning methods based on a digitalization problem [
34]. In the future, we should be able to develop related microservices for further preprocessing and broadcasting so that MSI with specific geographic location information can be overlaid directly on the chart of the BlueNavi App for additional safety and convenience of navigation.
In recent years, further upgrades and modernization of the maritime communications network are required, and efforts to improve maritime communications have been conducted [
35,
36]. For example, the VHF Data Exchange System (VDES), also called the next generation AIS, is being developed for future maritime data exchanges and communications [
37]. When VDES becomes available, with the use of satellites, a variety of additional usage scenarios in terms of information broadcast, data fetching, ship reporting, route exchange, etc., will also become possible, even in the open ocean where internet access is currently not available or extremely expensive. BlueNavi has the potential to add a seamless contribution to sustainable maritime transportation safety as VDES becomes available in the near future and broadens its usability platform.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}