
Use of Universal Simulation Software Tools for Optimization of Signal Plans at Urban Intersections

 ,
,  ,
,  , and
, and 
Abstract
:1. Introduction
2. Theoretical Base and Research Methods
2.1. Simulation and Modelling as a Tool for the Study of Intersections
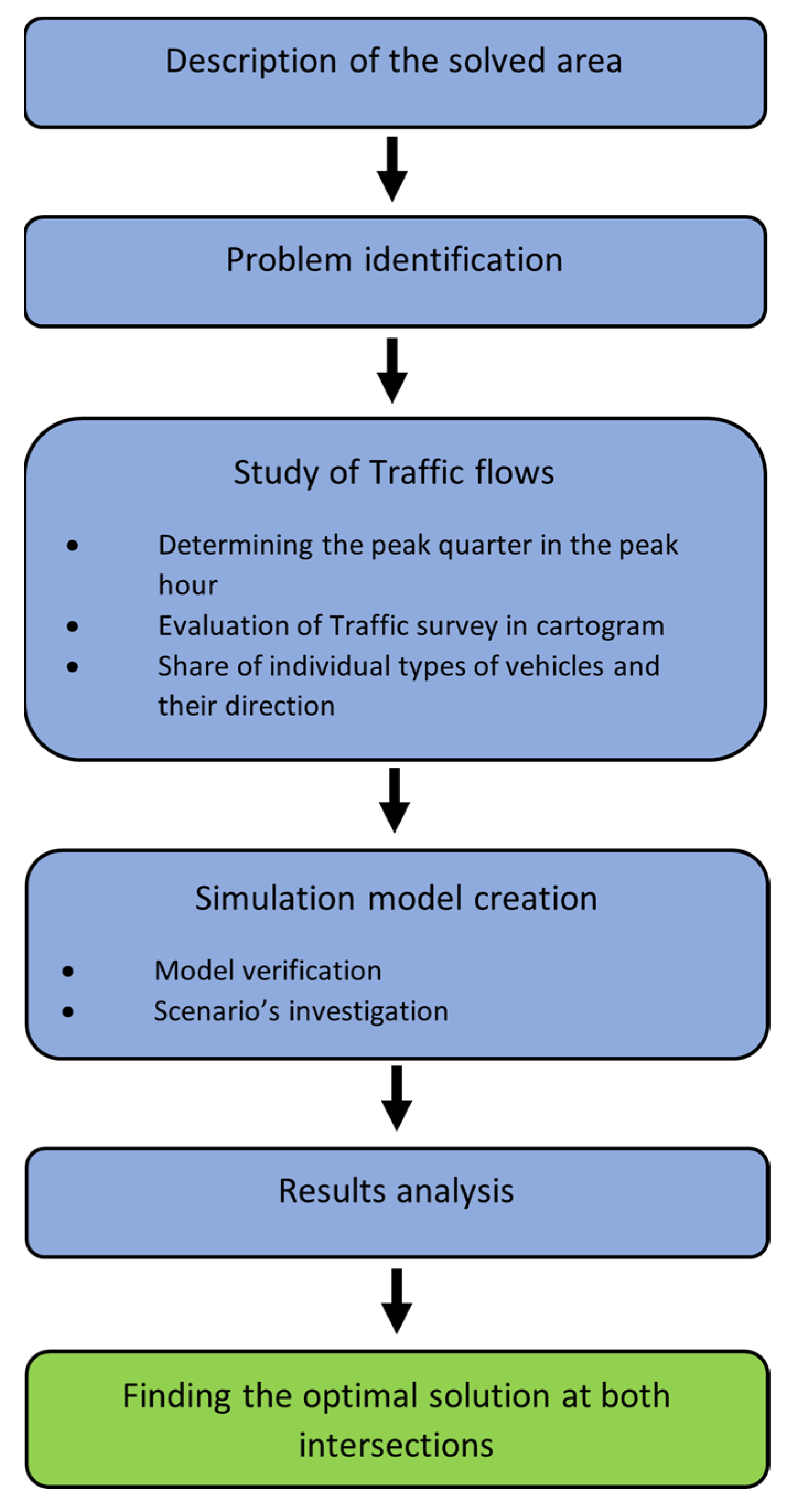
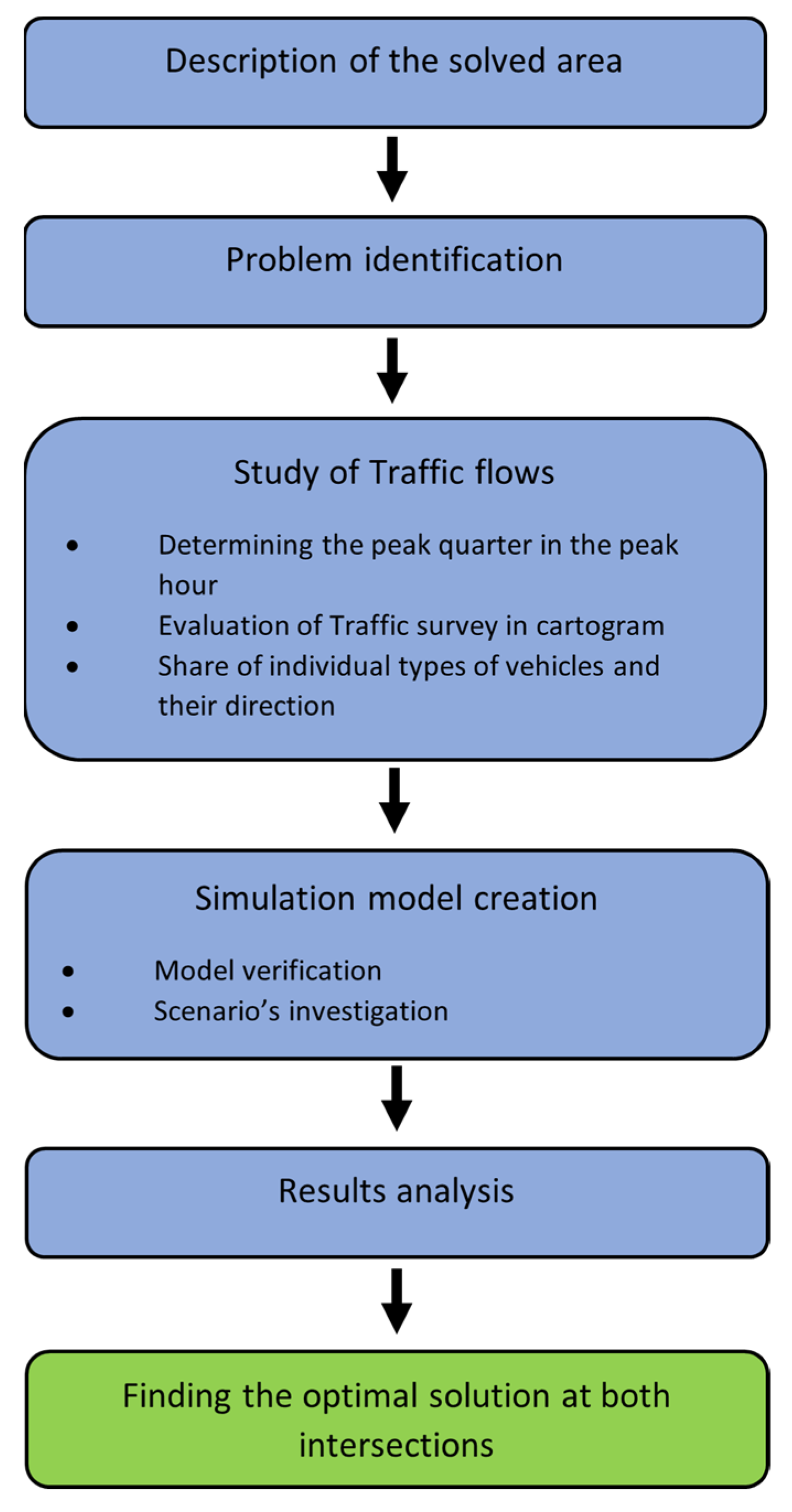
2.2. Research Methodology
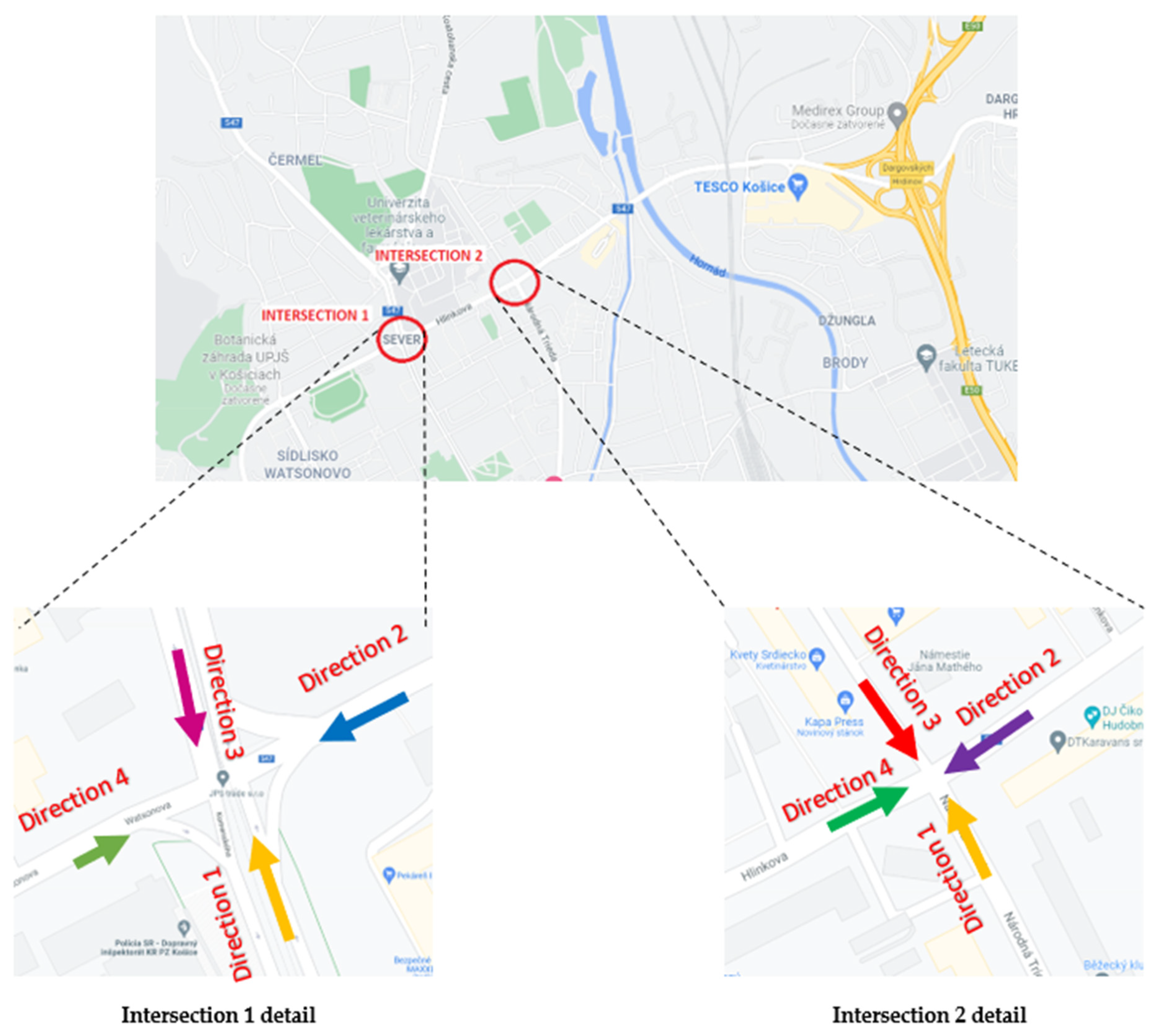
2.3. Description of the Solved Area and Problem Identification
2.4. Study of Traffic Flows on the Researched Intersection with Traffic Lights
2.4.1. Determining the Peak Quarter in the Peak Hour
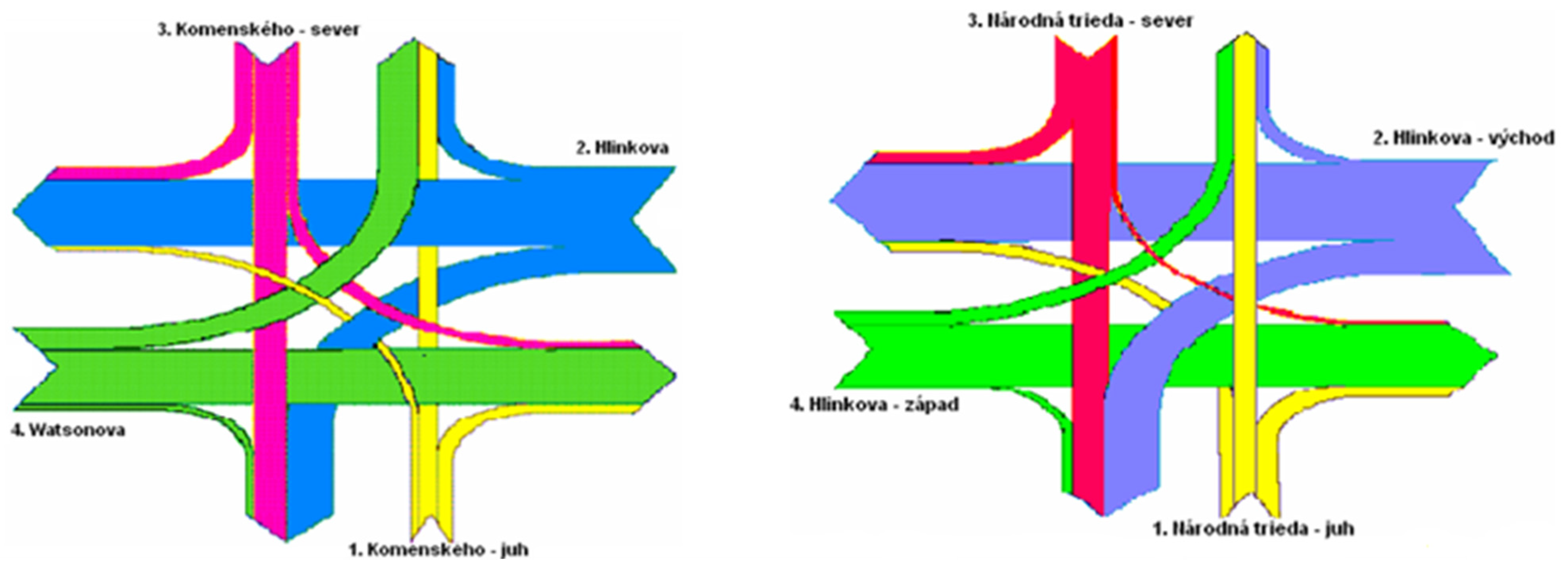
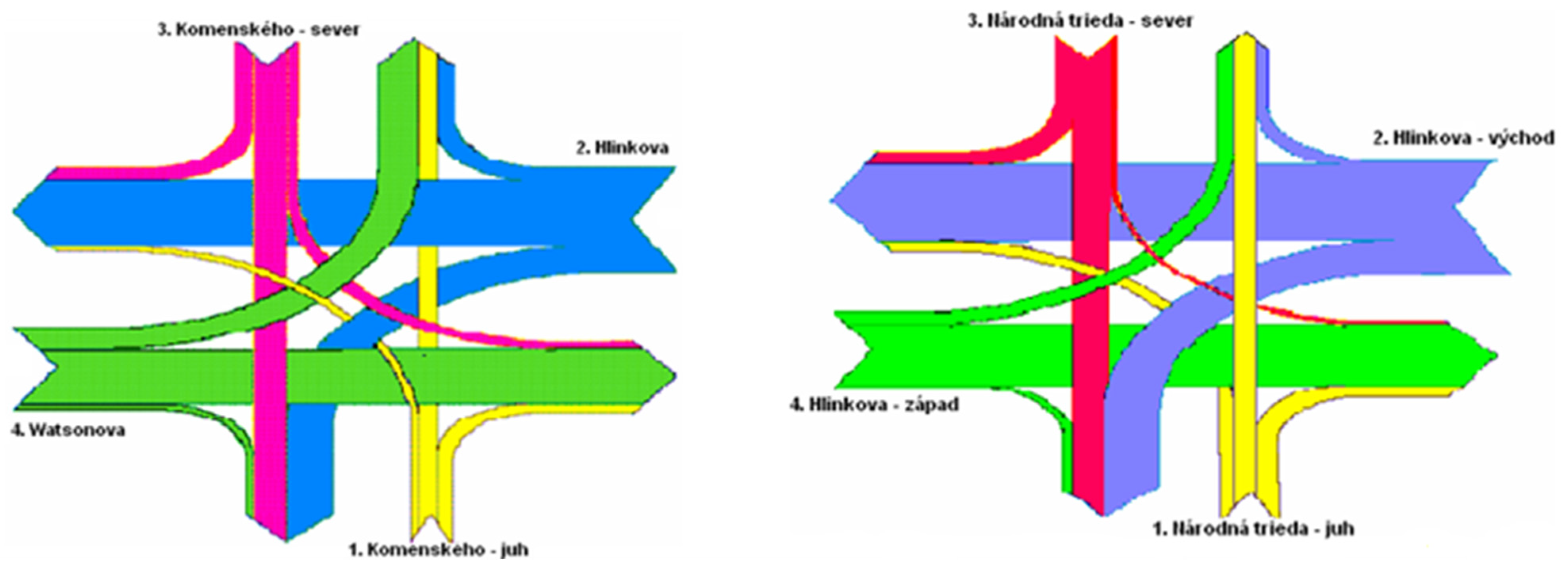
2.4.2. Evaluation of the Traffic Survey in the Cartogram
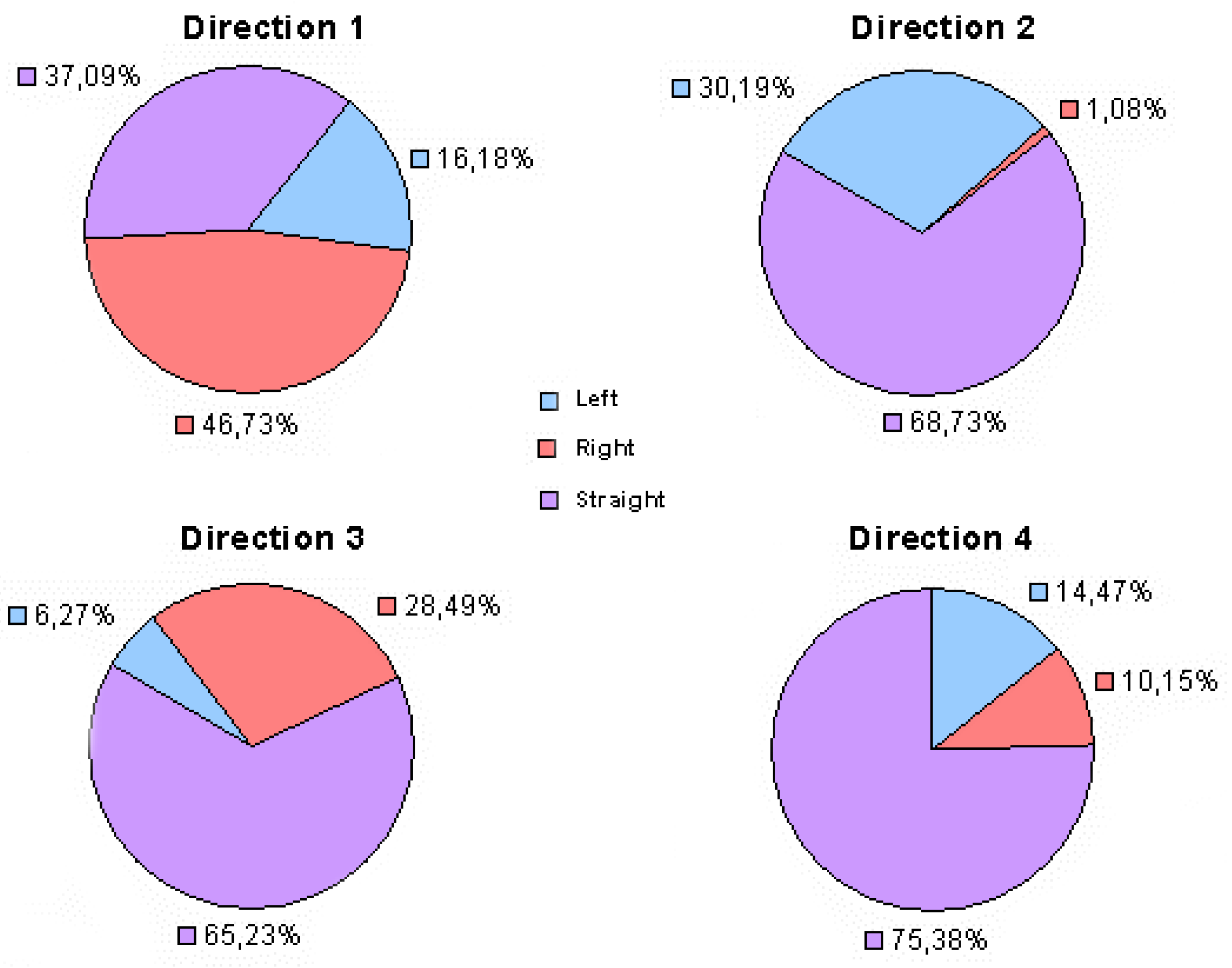
2.4.3. Share of Individual Types of Vehicles and Their Direction
2.4.4. Length of the Control Cycle
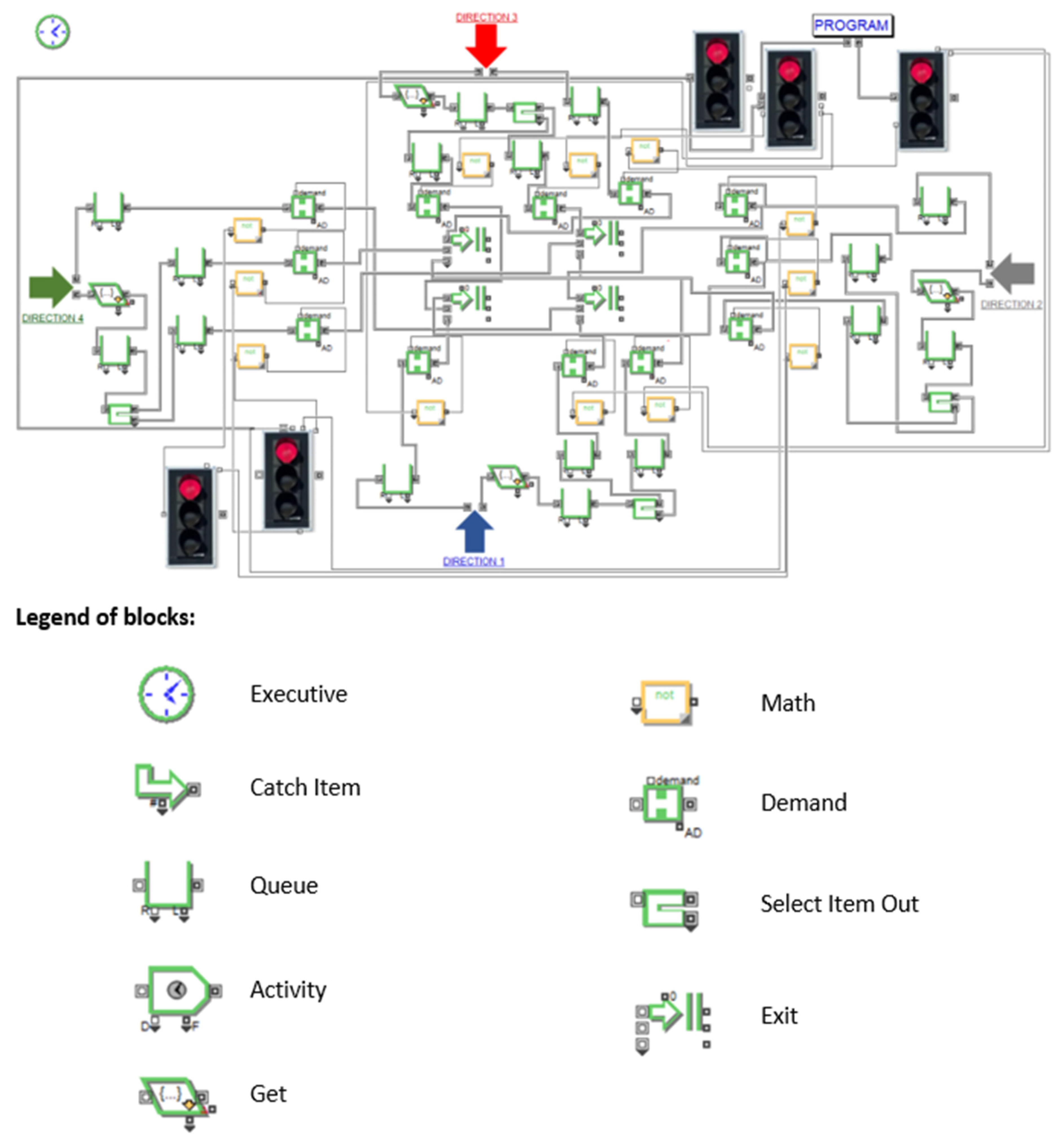
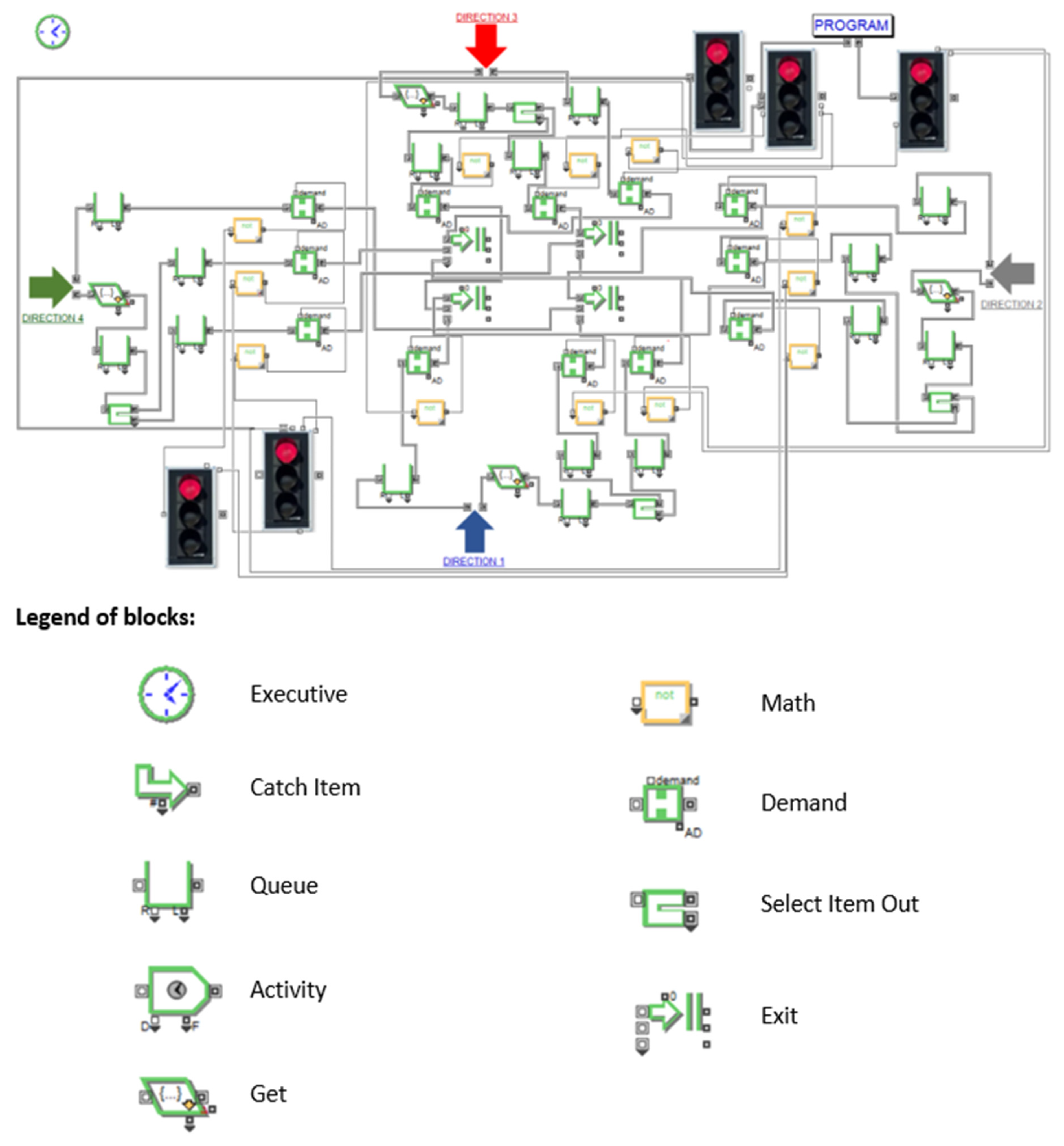
2.5. Simulation Model Creation
- 1.
- Used blocks from the Item Library:
- Block Executive: forms the heart of every discreet model. Allows the user to control the course of the simulation until the selected end time or until a specified number of events.
- Block Create: used to generate the input of requests to the discrete simulation model; the generation is realized based on the selected type of distribution of the random variable.
- Block Get: displays and outputs the properties of the elements that pass through the block. It is possible to work with multiple features and multiple output connectors.
- Block Select Item Out: chooses which output gets the elements from the input according to a certain decision.
- Block Queue: the block performs the function of a queue in which requests are waiting to be processed. In our case, it works on the principle of First In, First Out.
- Block Gate: limits the number of elements passing through the model; allows you to track how many elements are in which part of the model.
- Block Exit: the block removes processed requests from the simulation model from one input to several. Provides information about the number of requests processed in the dialog box. Additional connectors provide information on the total and a partial number of processed requests, which can be used, for example, to create graphs.
- 2.
- Used blocks from the Value Library:
- Block Math: the block performs various mathematical operations from the input connectors to a single output value on the output connector. The resulting block graphics are also adjusted according to the selected mathematical operation.
2.5.1. Model Verification
2.5.2. Scenario’s Investigation
3. Results and Discussion
3.1. Finding the Optimal Solution at an Intersection 2
3.2. Finding the Optimal Solution at an Intersection 1
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, J.-Q.; Wu, G.; Zou, N. Investigation of the impacts of signal timing on vehicle emissions at an isolated intersection. Transp. Res. Part D Transp. Environ. 2011, 16, 409–414. [Google Scholar] [CrossRef]
- Hewage, K.N.; Ruwanpura, J.Y. Optimization of traffic signal light timing using simulation. In Proceedings of the 2004 Winter Simulation Conference, Washington, DC, USA, 5–8 December 2004; Volume 2, pp. 1428–1433. [Google Scholar] [CrossRef]
- Webster, F.V. Traffic Signal Settings; Road Research Technical Paper; H.M. Stationery Office: London, UK, 1958. [Google Scholar]
- Ohno, K.; Mine, H. Optimal traffic signal settings—I. Criterion for undersaturation of a signalized intersection and optimal signal setting. Transp. Res. 1973, 7, 243–267. [Google Scholar] [CrossRef]
- Ohno, K.; Mine, H. Optimal traffic signal settings—II. A refinement of Webster’s method. Transp. Res. 1973, 7, 269–292. [Google Scholar] [CrossRef]
- Laguna, A.; Rakha, H.; Du, J. Optimizing Isolated Traffic Signal Timing Considering Energy and Environmental Impacts. In Proceedings of the 95th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 10–14 January 2016. [Google Scholar]
- Köhler, E.; Strehler, M. Traffic Signal Optimization: Combining Static and Dynamic Models. Transp. Sci. 2018, 53, 21–41. [Google Scholar] [CrossRef] [Green Version]
- Yao, R.; Zhou, H.; Ge, Y.E. Optimizing signal phase plan, green splits and lane length for isolated signalized intersections. Transport 2018, 33, 520–535. [Google Scholar] [CrossRef] [Green Version]
- Chow, A.; Sha, R.; Li, S. Centralised and decentralised signal timing optimisation approaches for network traffic control. Transp. Res. Procedia 2019, 38, 222–241. [Google Scholar] [CrossRef]
- Ma, X.; Jin, J.; Lei, W. Multi-criteria analysis of optimal signal plans using microscopic traffic models. Transp. Res. Part D Transp. Environ. 2014, 32, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Lan, C.-J.; Gu, X. Multi-Criteria Signal Timing Control for Over-Saturated Intersections. IFAC Proc. Vol. 2003, 36, 49–54. [Google Scholar] [CrossRef]
- Stevanovic, A.; Stevanovic, J.; So, J.; Ostojic, M. Multi-criteria optimization of traffic signals: Mobility, safety, and environment. Transp. Res. Part C Emerg. Technol. 2015, 55, 46–68. [Google Scholar] [CrossRef] [Green Version]
- Andrejiova, M.; Grincova, A.; Marasova, D.; Grendel, P. Multicriterial assessment of the raw material transport. ACTA Montan. SLOVACA 2015, 20, 26–32. [Google Scholar]
- Essa, M.; Sayed, T. Self-learning adaptive traffic signal control for real-time safety optimization. Accid. Anal. Prev. 2020, 146, 105713. [Google Scholar] [CrossRef] [PubMed]
- Reyad, P.; Sayed, T.; Essa, M.; Zheng, L. Real-Time Crash-Risk Optimization at Signalized Intersections. Transp. Res. Rec. 2021, 1–19. [Google Scholar] [CrossRef]
- Gomes, G.; Gan, Q.; Bayen, A. A methodology for evaluating the performance of model-based traffic prediction systems. Transp. Res. Part C Emerg. Technol. 2018, 96, 160–169. [Google Scholar] [CrossRef]
- Caliendo, C.; Russo, I.; Genovese, G. Resilience Assessment of a Twin-Tube Motorway Tunnel in the Event of a Traffic Accident or Fire in a Tube. Appl. Sci. 2022, 12, 513. [Google Scholar] [CrossRef]
- Straka, M.; Lenort, R.; Khouri, S.; Feliks, J. Design of large-scale logistics systems using computer simulation hierarchic structure. Int. J. Simul. Model. 2018, 17, 105–118. [Google Scholar] [CrossRef]
- Vilarinho, C.; Soares, G.; Macedo, J.; Tavares, J.; Rossetti, R. Capability-enhanced AIMSUN with Real-time Signal Timing Control. Procedia-Soc. Behav. Sci. 2014, 111, 262–271. [Google Scholar] [CrossRef] [Green Version]
- Maduranga, K.L.D.; Yasamali, R.G.N.; Sathyaprasad, I.M.S.; Weerakoon, H.U. Selection of Optimum Junction Operation Strategy for Gatambe Intersection Using VISSIM Simulation. In Lecture Notes in Civil Engineering; Springer: Singapore, 2020. [Google Scholar] [CrossRef]
- Boroiu, A.; Neagu, E.; Boroiu, A.; Pârlac, S. Study of the Possibilities to Improve the Service Level of Traffic Light Intersections by Road Traffic Micro-simulation. In SIAR International Congress of Automotive and Transport Engineering: Science and Management of Automotive and Transportation Engineering; Springer: Cham, Switzerland, 2020; pp. 349–358. ISBN 978-3-030-32563-3. [Google Scholar] [CrossRef]
- Arliansyah, J.; Bawono, R.T. Study on Performance of Intersection Around The Underpass Using Micro Simulation Program. IOP Conf. Ser. Earth Environ. Sci. 2018, 124, 12014. [Google Scholar] [CrossRef]
- Ahmad Yousef, K.M.; Shatnawi, A.; Latayfeh, M. Intelligent traffic light scheduling technique using calendar-based history information. Futur. Gener. Comput. Syst. 2019, 91, 124–135. [Google Scholar] [CrossRef]
- Kühnel, N.; Thunig, T.; Nagel, K. Implementing an adaptive traffic signal control algorithm in an agent-based transport simulation. Procedia Comput. Sci. 2018, 130, 894–899. [Google Scholar] [CrossRef]
- Behrisch, M.; Bieker, L.; Erdmann, J.; Krajzewicz, D. SUMO—Simulation of Urban MObility. In Proceedings of the SIMUL 2011, The Third International Conference on Advances in System Simulation, Barcelona, Spain, 23–28 October 2011. [Google Scholar]
- Van Haare Heijmeijer, A.; Vaz Alves, G. Development of a Middleware between SUMO simulation tool and JaCaMo framework. ADCAIJ Adv. Distrib. Comput. Artif. Intell. J. 2018, 7, 5–15. [Google Scholar] [CrossRef] [Green Version]
- Akhter, S.; Ahsan, M.N.; Quaderi, S.J.S.; Al Forhad, M.A.; Sumit, S.H.; Rahman, M.R. A SUMO Based Simulation Framework for Intelligent Traffic Management System. J. Traffic Logist. Eng. 2020, 8, 1–5. [Google Scholar] [CrossRef]
- Lopez, P.A.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flotterod, Y.P.; Hilbrich, R.; Lucken, L.; Rummel, J.; Wagner, P.; Wiebner, E. Microscopic Traffic Simulation using SUMO. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, Maui, HI, USA, 4–7 November 2018. [Google Scholar] [CrossRef] [Green Version]
- Maiorov, E.R.; Ludan, I.R.; Motta, J.D.; Saprykin, O.N. Developing a microscopic city model in SUMO simulation system. J. Phys. Conf. Ser. 2019, 1368, 042081. [Google Scholar] [CrossRef]
- Ismail, A.; Latif, M.; Awai, M. Exploiting witness for traffic simulation. J. Manag. Sci. 2014, 1, 12–24. [Google Scholar] [CrossRef]
- Simulation|ExtendSim Simulation Software. Available online: https://extendsim.com/solutions/simulation (accessed on 23 May 2020).
- Dui, H.; Zheng, X.; Chen, L.; Wang, Z. Model and simulation analysis for the reliability of the transportation network. J. Simul. 2020, 1–10. [Google Scholar] [CrossRef]
- Pekarcíková, M.; Trebuna, P.; Kliment, M.; Král, S.; Dic, M. Modelling and simulation the value stream mapping—case study. Manag. Prod. Eng. Rev. 2021, 12, 107–114. [Google Scholar] [CrossRef]
- Pekarcikova, M.; Trebuna, P.; Kliment, M.; Dic, M. Solution of bottlenecks in the logistics flow by applying the kanban module in the tecnomatix plant simulation software. Sustainability 2021, 13, 7989. [Google Scholar] [CrossRef]
- Bindzar, P.; Saderova, J.; Sofranko, M.; Kacmary, P.; Brodny, J.; Tutak, M. A case study: Simulation traffic model as a tool to assess one-way vs. two-way traffic on urban roads around the city center. Appl. Sci. 2021, 11, 5018. [Google Scholar] [CrossRef]
- Moll, S.; López, G.; García, A. Analysis of the influence of sport cyclists on narrow two-lane rural roads using instrumented bicycles and microsimulation. Sustainability 2021, 13, 1235. [Google Scholar] [CrossRef]
- Siroky, J.; Nachtigall, P.; Tischer, E.; Gasparik, J. Simulation of Railway Lines with a Simplified Interlocking System. Sustainability 2021, 13, 1394. [Google Scholar] [CrossRef]
- Tischer, E.; Nachtigall, P.; Siroky, J. The use of simulation modelling for determining the capacity of railway lines in the Czech conditions. OPEN Eng. 2020, 10, 224–231. [Google Scholar] [CrossRef] [Green Version]
- Straka, M.; Saderova, J.; Bindzar, P.; Malkus, T.; Lis, M. Computer simulation as a means of efficiency of transport processes of raw materials in relation to a cargo rail terminal: A case study. ACTA Montan. SLOVACA 2019, 24, 307–317. [Google Scholar]
- Thunig, T.; Scheffler, R.; Strehler, M.; Nagel, K. Optimization and simulation of fixed-time traffic signal control in real-world applications. Procedia Comput. Sci. 2019, 151, 826–833. [Google Scholar] [CrossRef]
- Paholok, I. Simulácia ako vedecká metóda. Electron. J. Philos. 2008, 2, 1–19. [Google Scholar]
- Lynx_v Slovensko Mapa—Stocková Ilustrace. Available online: https://cz.depositphotos.com/70380129/stock-illustration-slovakia-map.html (accessed on 4 January 2022).
- Maps, G. Košice. Available online: https://www.google.com/maps/@48.7380899,21.2482184,14.91z (accessed on 4 January 2022).
- Behun, M.; Kascak, P.; Hrabcak, M.; Behunova, A.; Knapcikova, L.; Sofranko, M. Investigation of sustainable geopolymer composite using automatic identification technology. Sustainability 2020, 12, 6377. [Google Scholar] [CrossRef]
- Saderova, J.; Rosova, A.; Behunova, A.; Behun, M.; Sofranko, M.; Khouri, S. Case study: The simulation modelling of selected activity in a warehouse operation. Wirel. Netw. 2021, 28, 431–440. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Matrix 1 Direction 1 (Komenskeho–Juh) | Matrix 2 Direction 2 (Hlinkova) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Cars | Trucks | Public tr. | Other | Total | Cars | Trucks | Public tr. | Other | Total | ||
| 7:00–7:15 | 7:00–7:15 | ||||||||||
| left | 20 | 2 | 0 | 0 | 22 | left | 95 | 1 | 1 | 0 | 97 |
| right | 23 | 2 | 0 | 0 | 25 | right | 9 | 0 | 0 | 0 | 9 |
| straight | 30 | 0 | 4 | 0 | 34 | straight | 215 | 2 | 4 | 0 | 221 |
| total | 73 | 4 | 4 | 0 | 81 | total | 319 | 3 | 5 | 0 | 327 |
| 7:15–7:30 | 7:15–7:30 | ||||||||||
| left | 17 | 2 | 0 | 0 | 19 | left | 104 | 1 | 1 | 0 | 106 |
| right | 33 | 1 | 0 | 0 | 34 | right | 11 | 0 | 0 | 0 | 11 |
| straight | 31 | 0 | 5 | 1 | 37 | straight | 239 | 2 | 5 | 1 | 247 |
| total | 81 | 3 | 5 | 1 | 90 | total | 354 | 3 | 6 | 1 | 364 |
| 7:30–7:45 | 7:30–7:45 | ||||||||||
| left | 25 | 3 | 0 | 0 | 28 | left | 113 | 2 | 1 | 0 | 116 |
| right | 35 | 2 | 0 | 0 | 37 | right | 14 | 0 | 0 | 0 | 14 |
| straight | 39 | 1 | 5 | 1 | 46 | straight | 282 | 4 | 6 | 1 | 293 |
| total | 99 | 6 | 5 | 1 | 111 | total | 409 | 6 | 7 | 1 | 423 |
| 7:45– 8:00 | 7:45–8:00 | ||||||||||
| left | 19 | 2 | 0 | 0 | 21 | left | 118 | 1 | 1 | 0 | 120 |
| right | 30 | 1 | 0 | 0 | 31 | right | 10 | 0 | 0 | 0 | 10 |
| straight | 34 | 1 | 4 | 1 | 40 | straight | 266 | 3 | 5 | 1 | 275 |
| total | 83 | 4 | 4 | 1 | 92 | total | 394 | 4 | 6 | 1 | 405 |
| Matrix 3 Direction 3 (Komenskeho–Sever) | Matrix 4 Direction 4 (Watsonova) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Cars | Trucks | Public tr. | Other | Total | Cars | Trucks | Public tr. | Other | Total | ||
| 7:00–7:15 | 7:00–7:15 | ||||||||||
| left | 25 | 2 | 0 | 0 | 25 | left | 59 | 0 | 0 | 0 | 59 |
| right | 34 | 0 | 0 | 0 | 34 | right | 11 | 0 | 0 | 0 | 11 |
| straight | 55 | 0 | 1 | 0 | 56 | straight | 189 | 0 | 3 | 0 | 192 |
| total | 114 | 0 | 1 | 0 | 115 | total | 259 | 0 | 3 | 0 | 262 |
| 7:15–7:30 | 7:15–7:30 | ||||||||||
| left | 24 | 0 | 1 | 0 | 25 | left | 65 | 1 | 1 | 0 | 67 |
| right | 39 | 0 | 1 | 0 | 40 | right | 15 | 0 | 0 | 0 | 15 |
| straight | 61 | 1 | 2 | 0 | 64 | straight | 202 | 1 | 5 | 1 | 209 |
| total | 124 | 1 | 4 | 0 | 129 | total | 282 | 2 | 6 | 1 | 291 |
| 7:30–7:45 | 7:30–7:45 | ||||||||||
| left | 32 | 0 | 0 | 1 | 33 | left | 75 | 0 | 1 | 0 | 76 |
| right | 47 | 0 | 1 | 0 | 48 | right | 22 | 0 | 0 | 0 | 22 |
| straight | 69 | 1 | 3 | 1 | 74 | straight | 222 | 1 | 6 | 1 | 230 |
| total | 148 | 1 | 4 | 2 | 155 | total | 319 | 1 | 7 | 1 | 328 |
| 7:45–8:00 | 7:45– 8:00 | ||||||||||
| left | 27 | 0 | 1 | 0 | 28 | left | 65 | 0 | 0 | 0 | 65 |
| right | 40 | 0 | 0 | 0 | 40 | right | 18 | 0 | 0 | 0 | 18 |
| straight | 64 | 0 | 3 | 0 | 67 | straight | 219 | 0 | 5 | 0 | 224 |
| total | 131 | 0 | 4 | 0 | 135 | total | 302 | 0 | 5 | 0 | 307 |
| Vehicle Type | Intersection 1 | Intersection 2 | ||
|---|---|---|---|---|
| Quantity [veh.] | Proportion [%] | Quantity [veh.] | Proportion [%] | |
| cars | 3491 | 96.57 | 4120 | 97.37 |
| trucks | 38 | 1.05 | 42 | 1.00 |
| public transportation | 76 | 2.10 | 61 | 1.44 |
| other | 10 | 0.28 | 8 | 0.19 |
| total | 3615 | 100 | 4231 | 100 |
| Vehicle Type | Coefficient [-] |
|---|---|
| Car | 1.0 |
| Truck | 1.5 |
| Public | 1.6 |
| Other | 1.4 |
| Turn Direction | Number of Vehicles from Direction 1 [veh.] | Number of Vehicles from Direction 2 [veh.] | Number of Vehicles from Direction 3 [veh.] | Number of Vehicles from Direction 4 [veh.] |
|---|---|---|---|---|
| left | 90 | 439 | 111 | 267 |
| right | 127 | 44 | 162 | 66 |
| straight | 374 | 1136 | 261 | 855 |
| total | 591 | 1619 | 534 | 1188 |
| Turn Direction | Number of Vehicles from Direction 1 [veh.] | Number of Vehicles from Direction 2 [veh.] | Number of Vehicles from Direction 3 [veh.] | Number of Vehicles from Direction 4 [veh.] |
|---|---|---|---|---|
| left | 89 | 586 | 35 | 171 |
| right | 257 | 21 | 159 | 120 |
| straight | 204 | 1334 | 364 | 891 |
| total | 550 | 1941 | 558 | 1182 |
| Turn Direction | Measured Values from a Survey [veh.] | Simulation Values [veh.] | ||||||
|---|---|---|---|---|---|---|---|---|
| Direction 1 | Direction 2 | Direction 3 | Direction 4 | Direction 1 | Direction 2 | Direction 3 | Direction 4 | |
| left | 90 | 439 | 111 | 267 | 90 | 439 | 111 | 267 |
| right | 127 | 44 | 162 | 66 | 127 | 44 | 162 | 66 |
| straight | 374 | 1136 | 261 | 855 | 374 | 1136 | 261 | 855 |
| total | 591 | 1619 | 534 | 1188 | 591 | 1619 | 534 | 1188 |
| Turn Direction | Measured Values from a Survey [veh.] | Simulation Values [veh.] | ||||||
|---|---|---|---|---|---|---|---|---|
| Direction 1 | Direction 2 | Direction 3 | Direction 4 | Direction 1 | Direction 2 | Direction 3 | Direction 4 | |
| left | 89 | 586 | 35 | 171 | 89 | 586 | 35 | 171 |
| right | 257 | 21 | 159 | 120 | 257 | 21 | 159 | 120 |
| straight | 204 | 1334 | 364 | 891 | 204 | 1334 | 364 | 891 |
| total | 550 | 1941 | 558 | 1182 | 550 | 1941 | 558 | 1182 |
| Scenario | Change of Green Signal | |||
|---|---|---|---|---|
| At Intersection 1 | At Intersection 2 | |||
| Green Signal Length [sec.] | The Difference Compared to the Current State [sec.] | Green Signal Length [sec.] | The Difference Compared to the Current State [sec.] | |
| Scenario 1 | 30 | 0 | ||
| Scenario 2 | 35 | +5 | ||
| Scenario 3 | 40 | +10 | ||
| Scenario 4 | 45 | +15 | ||
| Scenario 5 | 30 | 0 | 30 | 0 |
| Scenario 6 | 30 | 0 | 40 | +10 |
| Scenario 7 | 35 | +5 | 40 | +10 |
| Scenario 8 | 40 | +10 | 40 | +10 |
| Scenario 9 | 45 | +15 | 40 | +10 |
| Time Frame | Number of Vehicles that Came to the Intersection [veh.] | Number of Vehicles that Passed the Intersection [veh.] | [%] | Number of Vehicles Standing in front of an Intersection [veh.] | [%] |
|---|---|---|---|---|---|
| 7.00–7.15 | 592 | 434 | 73 | 158 | 27 |
| 7.15–7.30 | 734 | 497 | 67 | 237 | 33 |
| 7.30–7.45 | 801 | 517 | 65 | 284 | 35 |
| 7.45–8.00 | 716 | 493 | 68 | 223 | 32 |
| total | 2843 | 1941 | 902 |
| Time Frame | Number of Vehicles that Came to the Intersection [veh.] | Number of Vehicles that Passed the Intersection [veh.] | [%] | Number of Vehicles Standing in front of an Intersection [veh.] | [%] |
|---|---|---|---|---|---|
| 7.00–7.15 | 592 | 75 | 25 | ||
| 7.15–7.30 | 734 | 68 | 32 | ||
| 7.30–7.45 | 801 | 69 | 31 | ||
| 7.45–8.00 | 716 | 70 | 30 | ||
| total | 2843 |
| Time Frame | Number of Vehicles That Came to the Intersection [veh.] | Number of Vehicles That Passed the Intersection [veh.] | [%] | Number of Vehicles Standing in front of an Intersection [veh.] | [%] |
|---|---|---|---|---|---|
| 7.00–7.15 | 592 | 504 | 86 | 88 | 14 |
| 7.15–7.30 | 734 | 579 | 79 | 155 | 21 |
| 7.30–7.45 | 801 | 605 | 76 | 196 | 24 |
| 7.45–8.00 | 716 | 569 | 80 | 147 | 20 |
| total | 2843 | 2257 | 586 |
| Time Frame | Number of Vehicles that Came to the Intersection [veh.] | Number of Vehicles That Passed the Intersection [veh.] | [%] | Number of Vehicles Standing in front of an Intersection [veh.] | [%] |
|---|---|---|---|---|---|
| 7.00–7.15 | 592 | 444 | 75 | 148 | 25 |
| 7.15–7.30 | 734 | 499 | 68 | 235 | 32 |
| 7.30–7.45 | 801 | 593 | 74 | 208 | 26 |
| 7.45–8.00 | 716 | 501 | 70 | 215 | 30 |
| total | 2843 | 2037 | 806 |
| Time Frame | Number of Vehicles That Came to the Intersection [veh.] | Number of Vehicles That Passed the Intersection [veh.] | [%] | Number of Vehicles Standing in front of An Intersection [veh.] | [%] |
|---|---|---|---|---|---|
| 7.00–7.15 | 381 | 327 | 86 | 54 | 14 |
| 7.15–7.30 | 443 | 364 | 83 | 79 | 17 |
| 7.30–7.45 | 549 | 423 | 78 | 126 | 22 |
| 7.45–8.00 | 503 | 405 | 81 | 98 | 19 |
| total | 1876 | 1519 | 357 |
| Time Frame | Number of Vehicles that Came to the Intersection [veh.] | Number of Vehicles That Passed the Intersection [veh.] | [%] | Number of Vehicles Standing in front of an Intersection [veh.] | [%] |
|---|---|---|---|---|---|
| 7.00–7.15 | 428 | 327 | 77 | 101 | 23 |
| 7.15–7.30 | 498 | 364 | 74 | 134 | 26 |
| 7.30–7.45 | 625 | 423 | 68 | 202 | 32 |
| 7.45–8.00 | 568 | 405 | 72 | 163 | 28 |
| total | 2119 | 1519 | 600 |
| Time Frame | Number of Vehicles That Came to the Intersection [veh.] | Number of Vehicles That Passed the Intersection [veh.] | [%] | Number of Vehicles Standing in front of an Intersection [veh.] | [%] |
|---|---|---|---|---|---|
| 7.00–7.15 | 428 | 374 | 87 | 54 | 13 |
| 7.15–7.30 | 498 | 412 | 83 | 86 | 17 |
| 7.30–7.45 | 625 | 499 | 80 | 126 | 20 |
| 7.45–8.00 | 568 | 460 | 81 | 108 | 19 |
| total | 2119 | 1745 | 374 |
| Time Frame | Number of Vehicles That Came to the Intersection [veh.] | Number of Vehicles That Passed the Intersection [veh.] | [%] | Number of Vehicles Standing in front of an Intersection [veh.] | [%] |
|---|---|---|---|---|---|
| 7.00–7.15 | 428 | 370 | 86 | 58 | 14 |
| 7.15–7.30 | 498 | 403 | 81 | 95 | 19 |
| 7.30–7.45 | 625 | 481 | 77 | 144 | 23 |
| 7.45–8.00 | 568 | 454 | 80 | 114 | 20 |
| total | 2119 | 1708 | 411 |
| Time Frame | Number of Vehicles That Came to the Intersection [veh.] | Number of Vehicles That Passed the In-tersection [veh.] | [%] | Number of Vehicles Standing in front of an Intersection [veh.] | [%] |
|---|---|---|---|---|---|
| 7.00–7.15 | 428 | 359 | 84 | 69 | 16 |
| 7.15–7.30 | 498 | 406 | 82 | 92 | 18 |
| 7.30–7.45 | 625 | 474 | 76 | 151 | 24 |
| 7.45–8.00 | 568 | 453 | 80 | 115 | 20 |
| total | 2119 | 1692 | 427 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bindzar, P.; Macuga, D.; Brodny, J.; Tutak, M.; Malindzakova, M. Use of Universal Simulation Software Tools for Optimization of Signal Plans at Urban Intersections. Sustainability 2022, 14, 2079. https://doi.org/10.3390/su14042079
Bindzar P, Macuga D, Brodny J, Tutak M, Malindzakova M. Use of Universal Simulation Software Tools for Optimization of Signal Plans at Urban Intersections. Sustainability. 2022; 14(4):2079. https://doi.org/10.3390/su14042079
Chicago/Turabian StyleBindzar, Peter, Daniel Macuga, Jaroslaw Brodny, Magdalena Tutak, and Marcela Malindzakova. 2022. "Use of Universal Simulation Software Tools for Optimization of Signal Plans at Urban Intersections" Sustainability 14, no. 4: 2079. https://doi.org/10.3390/su14042079
APA StyleBindzar, P., Macuga, D., Brodny, J., Tutak, M., & Malindzakova, M. (2022). Use of Universal Simulation Software Tools for Optimization of Signal Plans at Urban Intersections. Sustainability, 14(4), 2079. https://doi.org/10.3390/su14042079