
ABIDE: A Novel Scheme for Ultrasonic Echo Estimation by Combining CEEMD-SSWT Method with EM Algorithm



Abstract
:1. Introduction
2. Modeling of Ultrasonic Echo Signal
3. Methodology
3.1. Review of the CEEMD Method
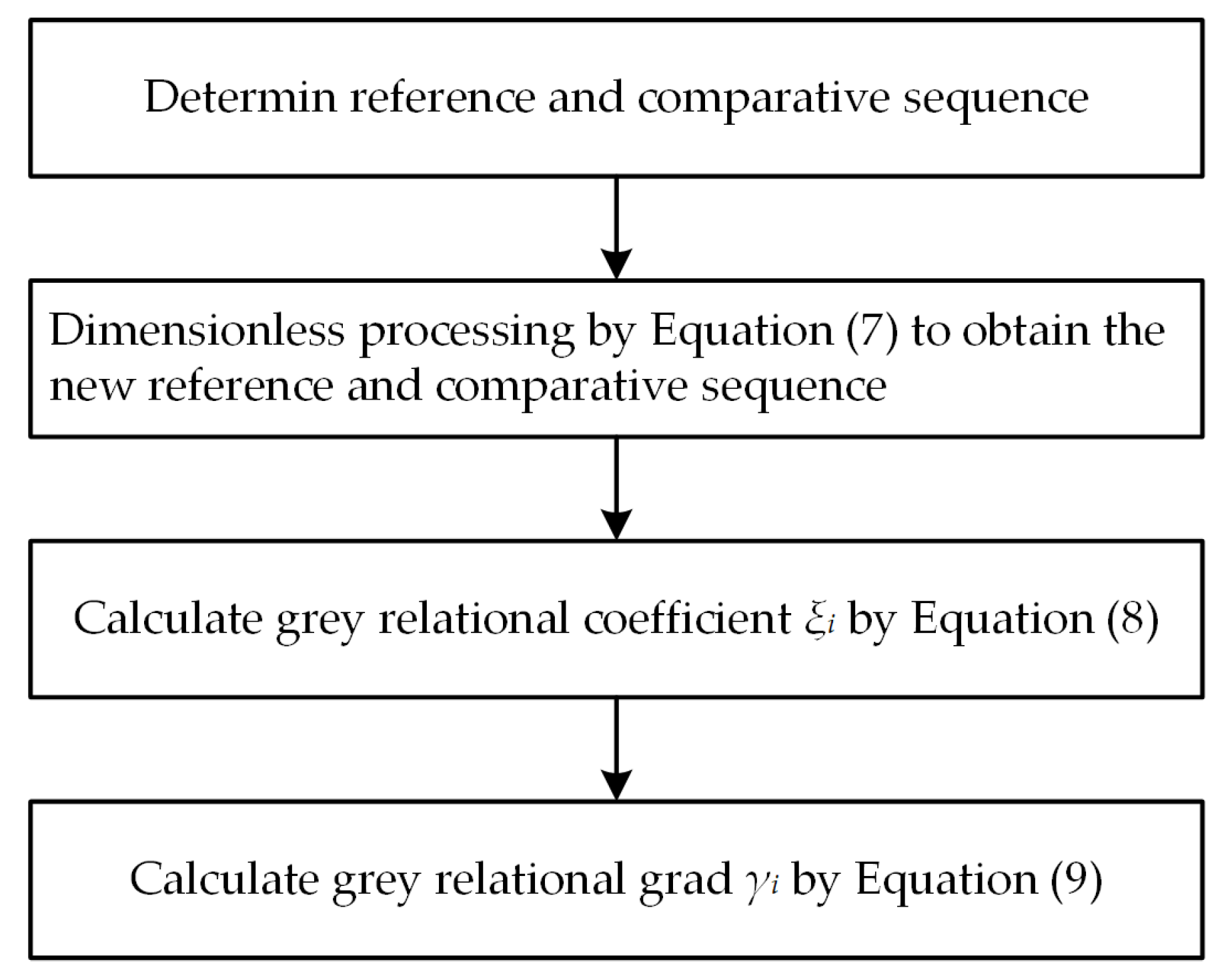
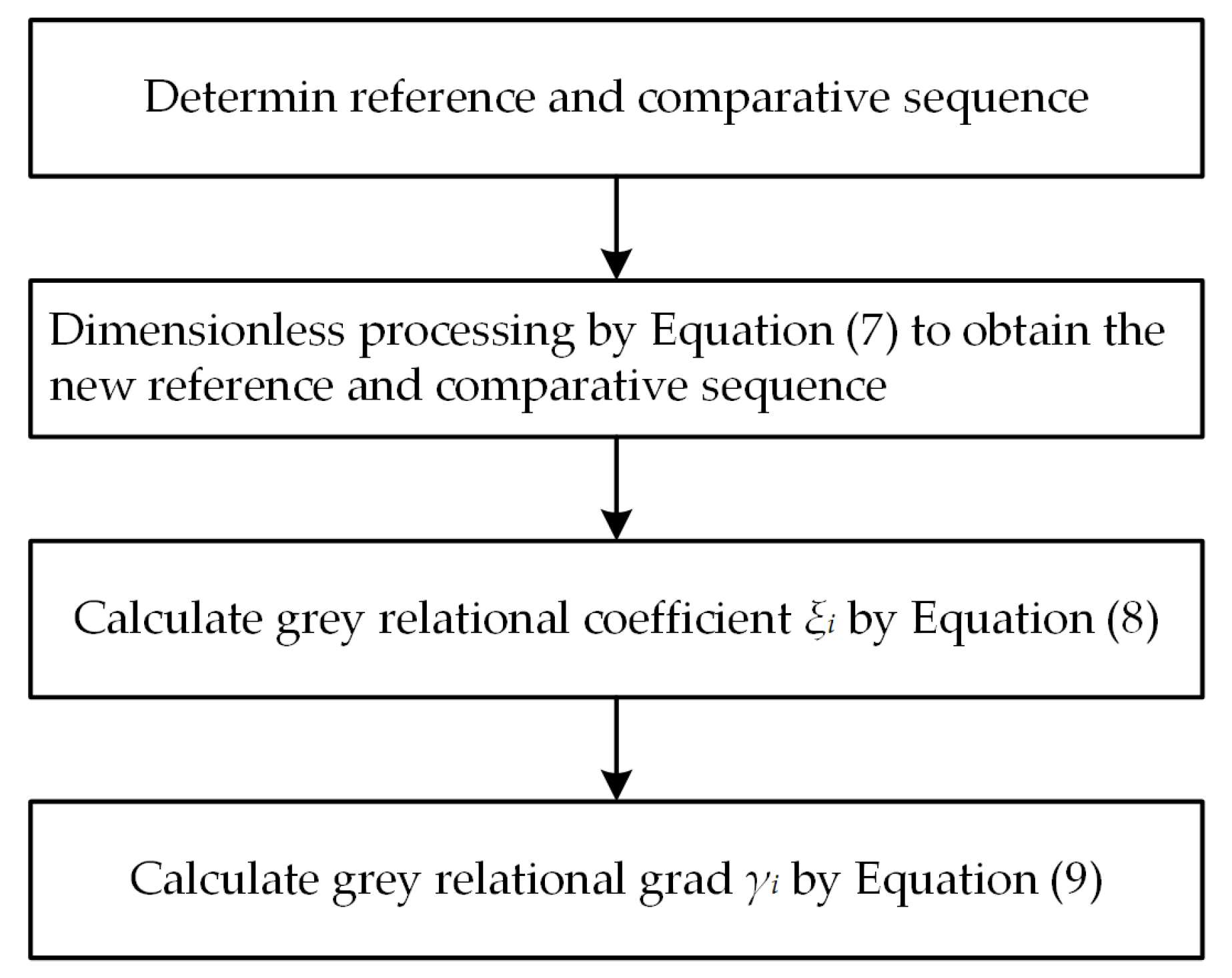
3.2. Grey Relational Analysis
3.3. SSWT Method
3.4. EM Algorithm
3.5. ABIDE’s Ultrasonic Echo Parameter Estimation
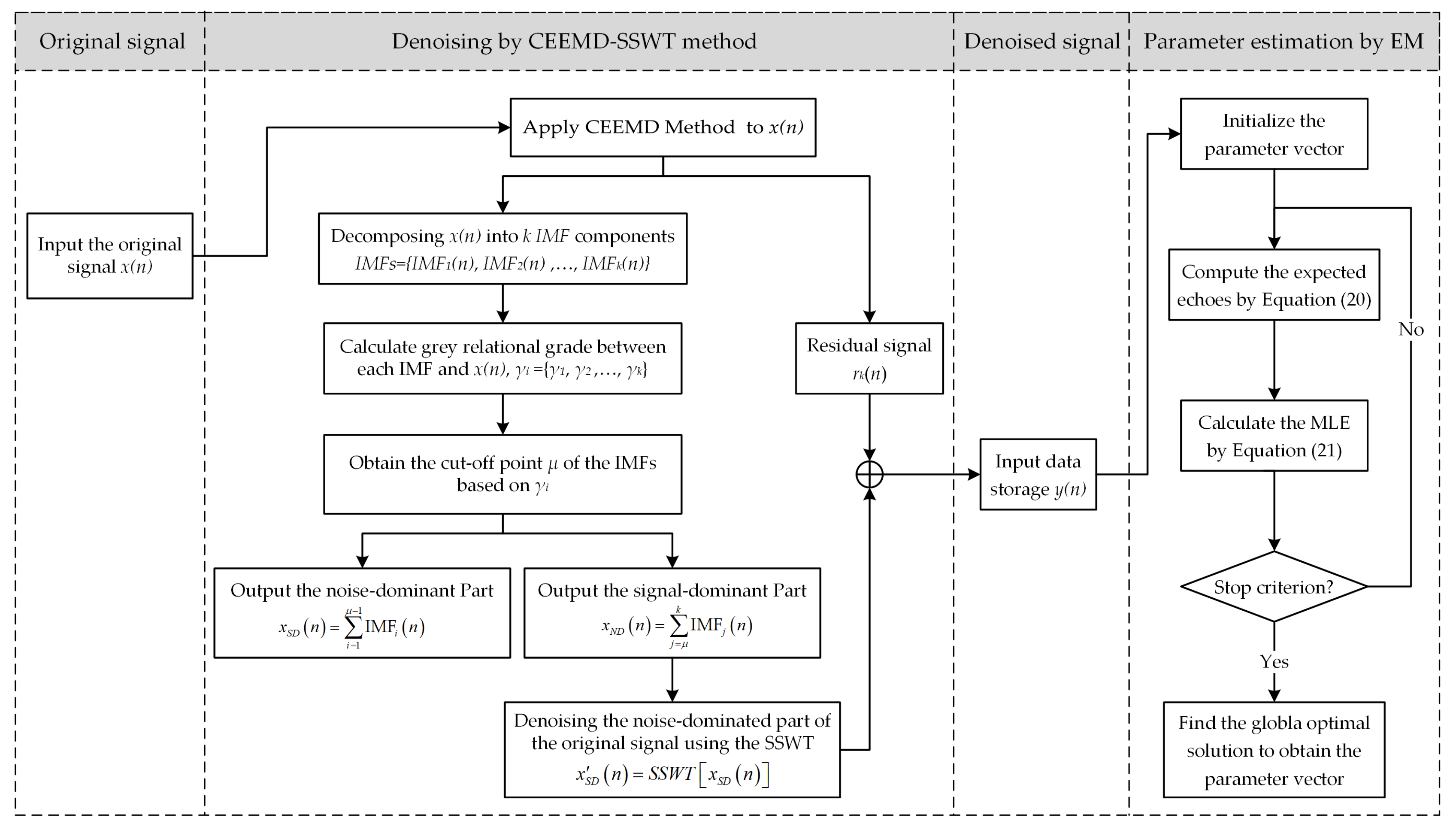
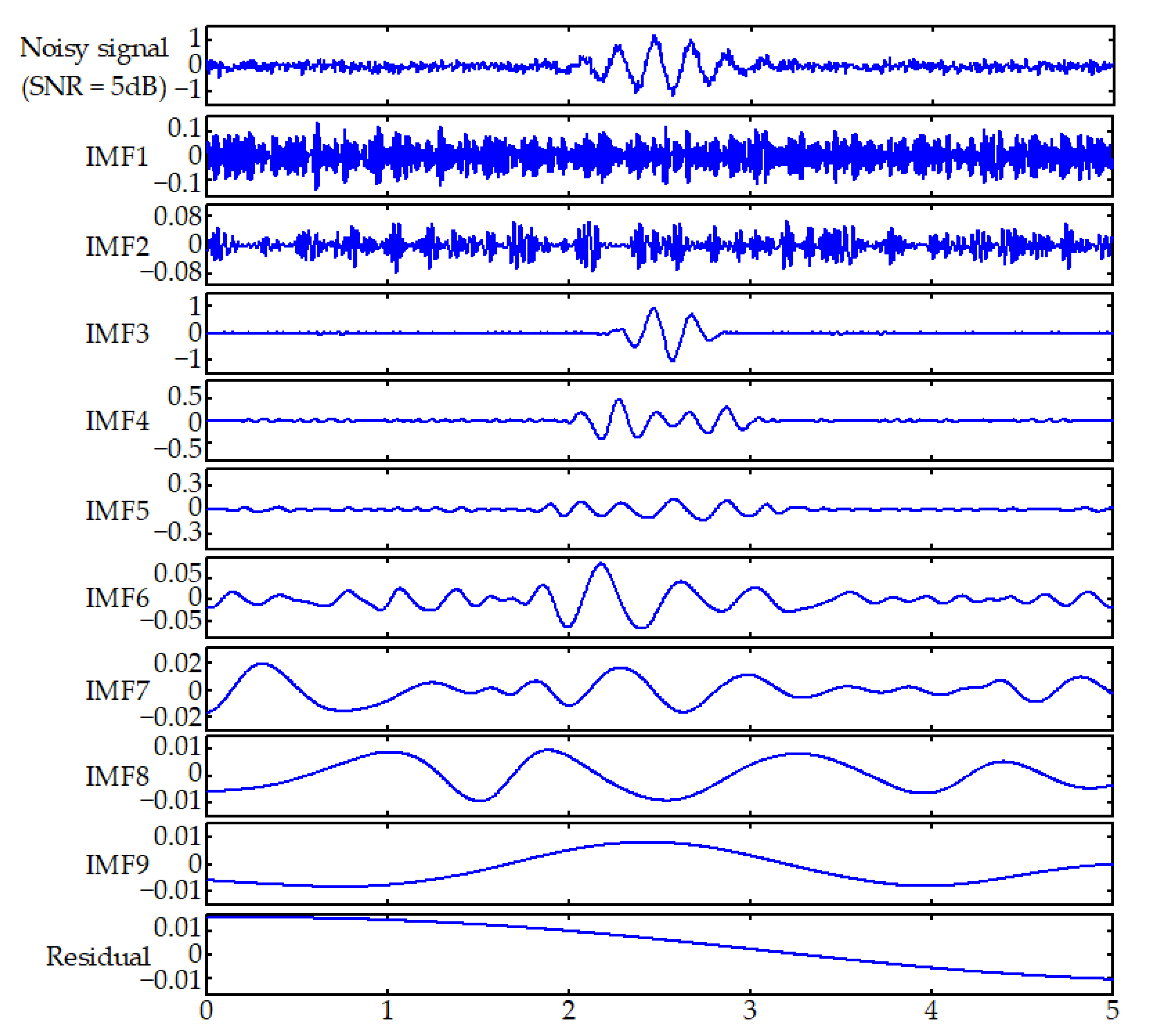
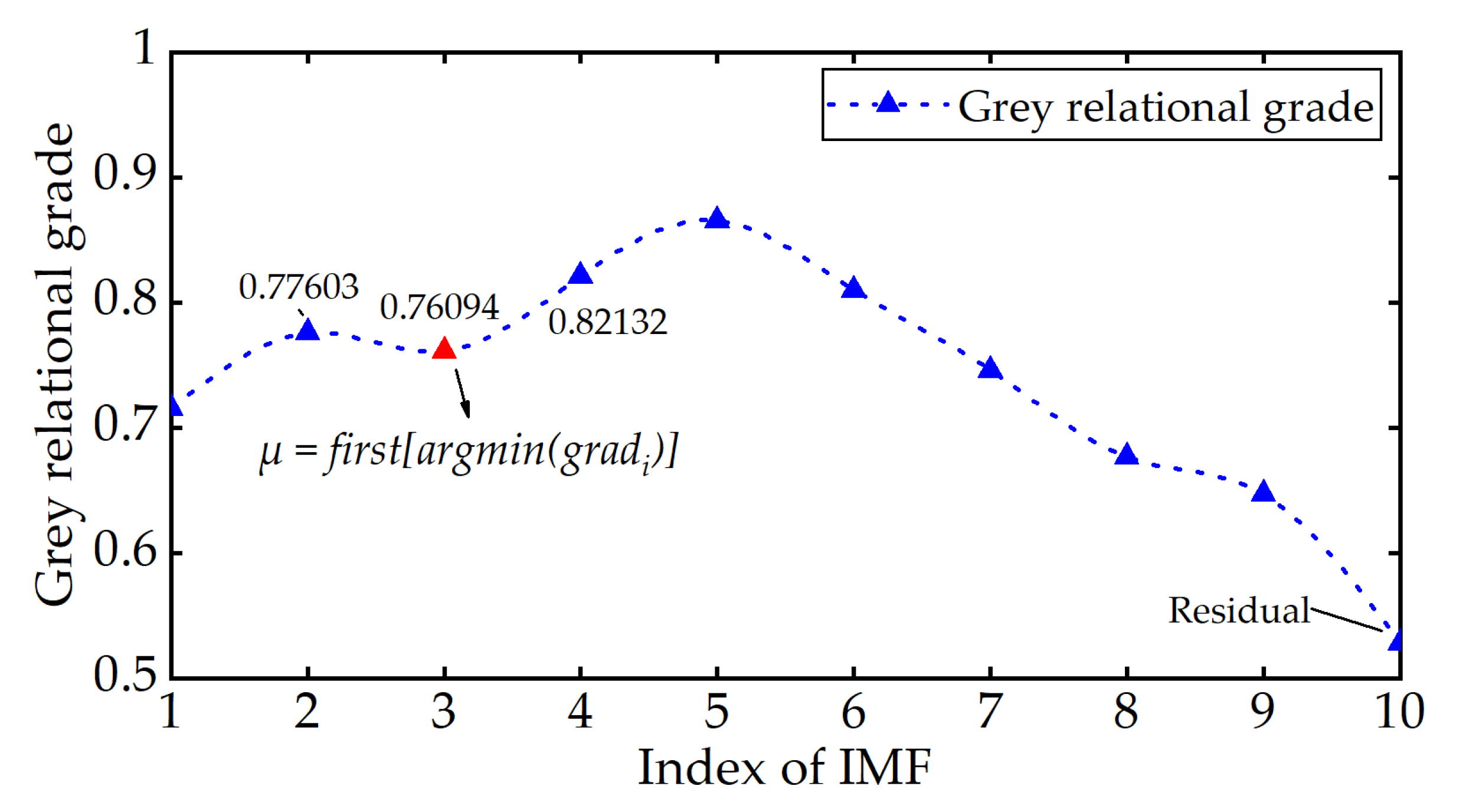
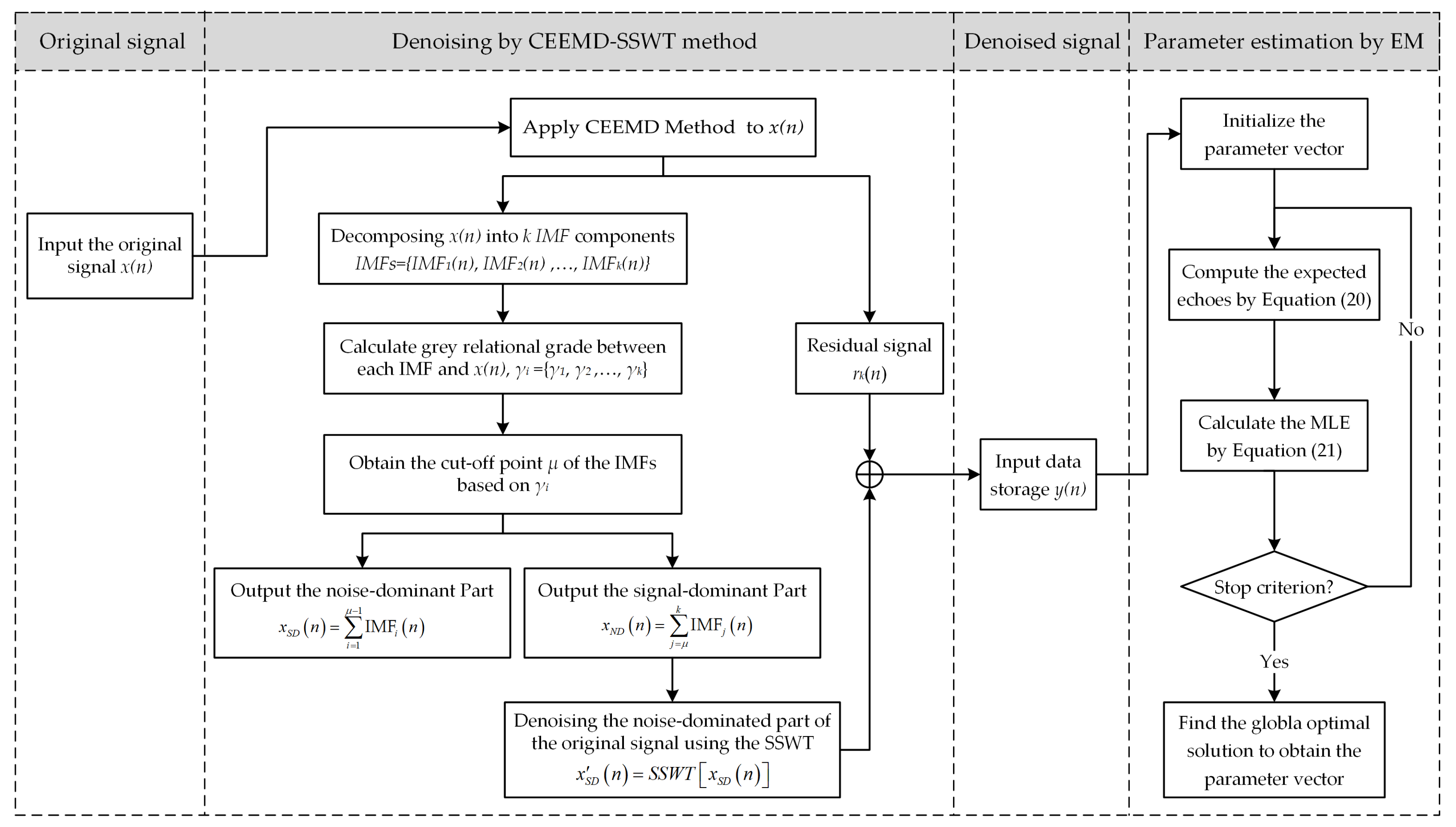
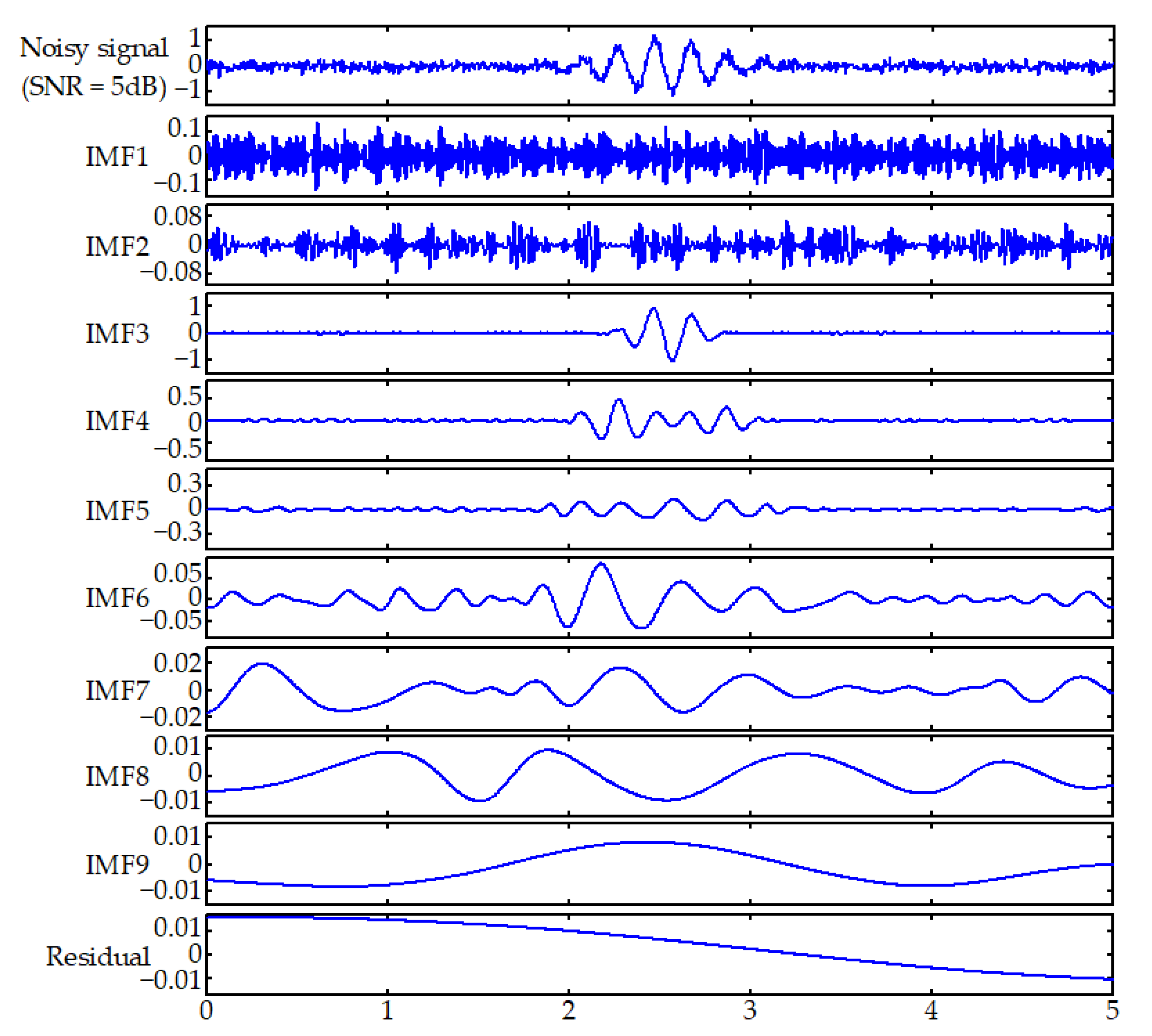
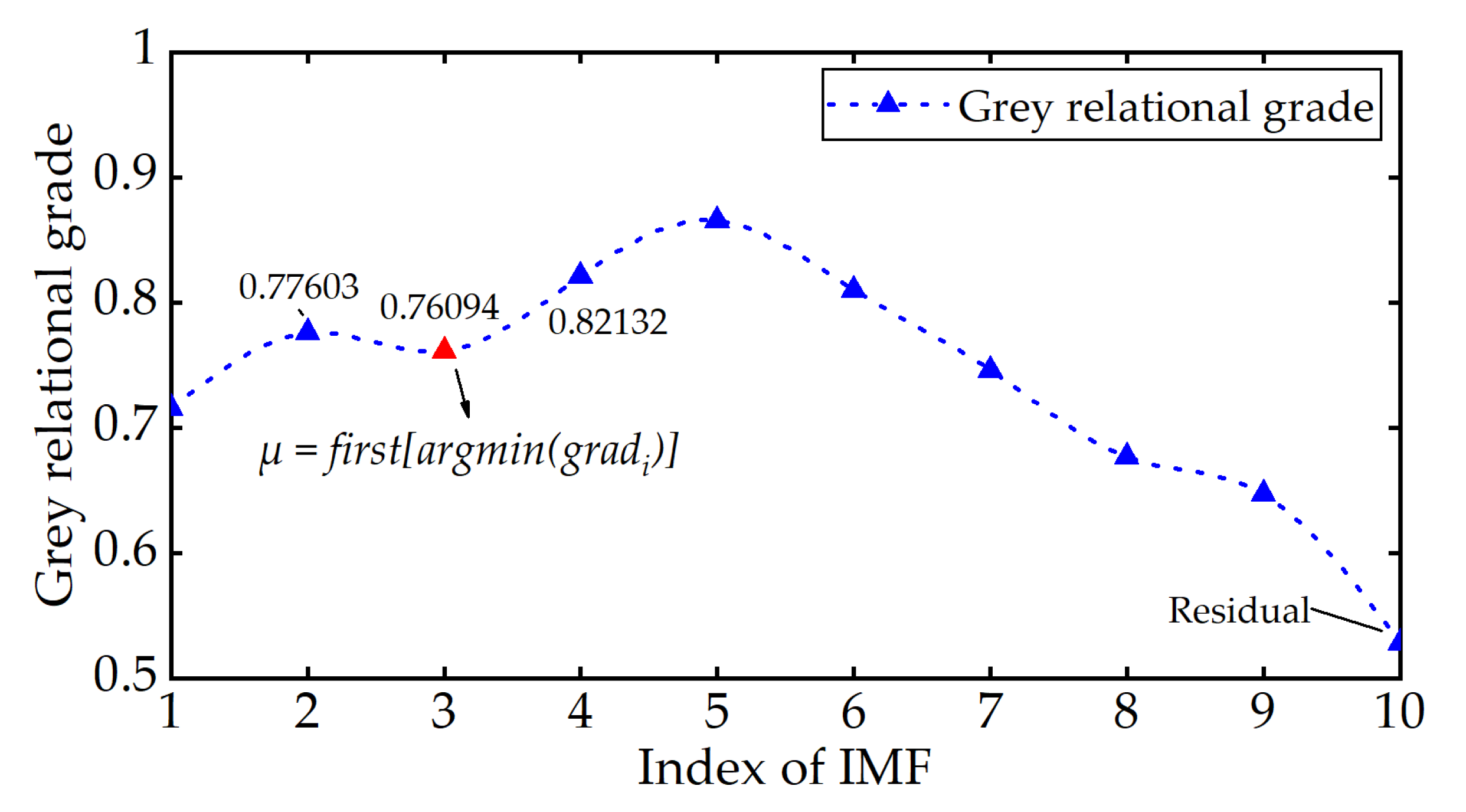
- Assuming that the original signal is , the CEEMD algorithm (Section 3.1) is adopted to process the original signal. IMF components and a residual are obtained. Note that the obtained IMF components are arranged in descending order of frequency. The low-order IMF includes the high-frequency part of the signal, for example, the high-frequency part of the original signal and the noise, while the high-order IMF includes the low-frequency part of the original signal, which is less affected by noise. According to grey relational theory (Section 3.2), the grey relational grade between each IMF component in each order and the original signal is calculated. This process is written as
- Then, the cut-off point is determined based on the grey relational grade corresponding to the IMF component. This cut-off point is used to split the IMF decomposition into the noise-dominant part (low-order IMF components) and the signal-dominant part (high-order IMF components) . The cut-off point criterion and signal reconstruction process are written as follows:
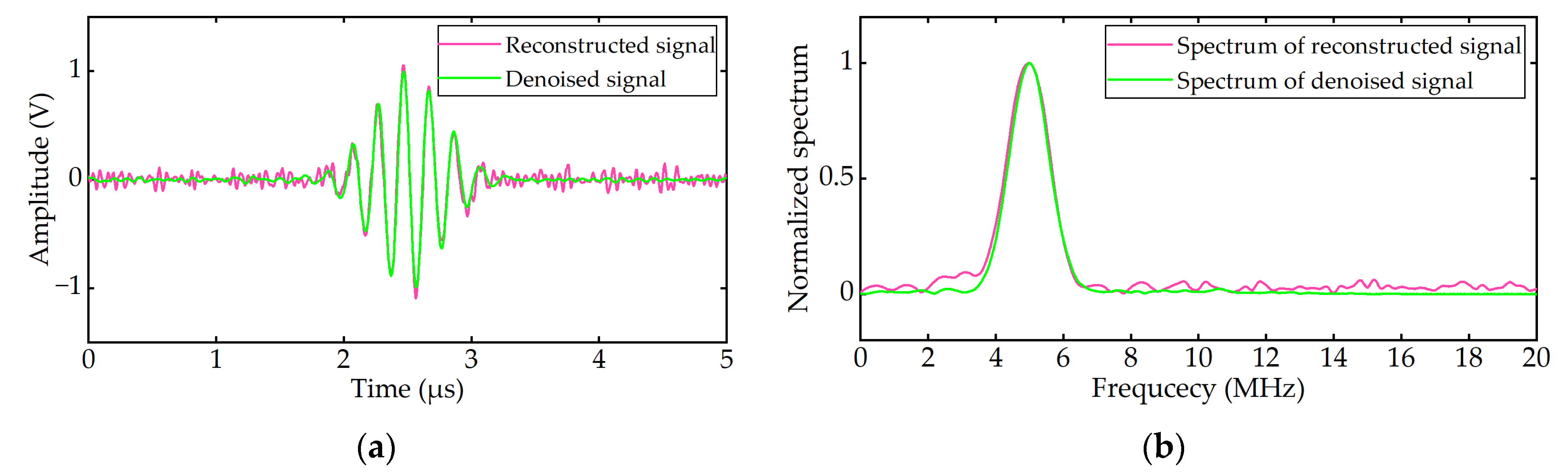
- The SSWT method (Section 3.3) is performed on the signal-dominant part to obtain the noise reduction signal . Then, the and the residual signal are reconstructed into a new input signal for subsequent processing, as follows:
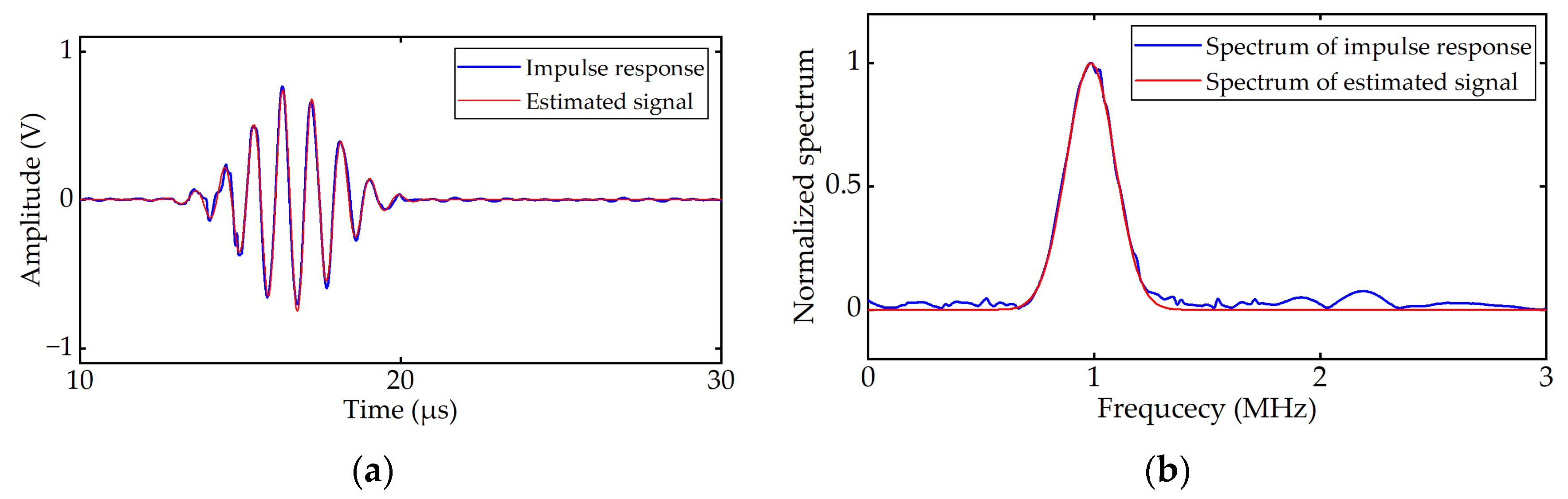
- The signal obtained by the CEEMD-SSWT method is approximated by the EM algorithm (Section 3.4) which finds the global optimal solution to obtain the parameter vector of the signal . is defined as the model parameter vector of the original signal .
4. Experimental Setup and Datasets
4.1. Experimental Setup
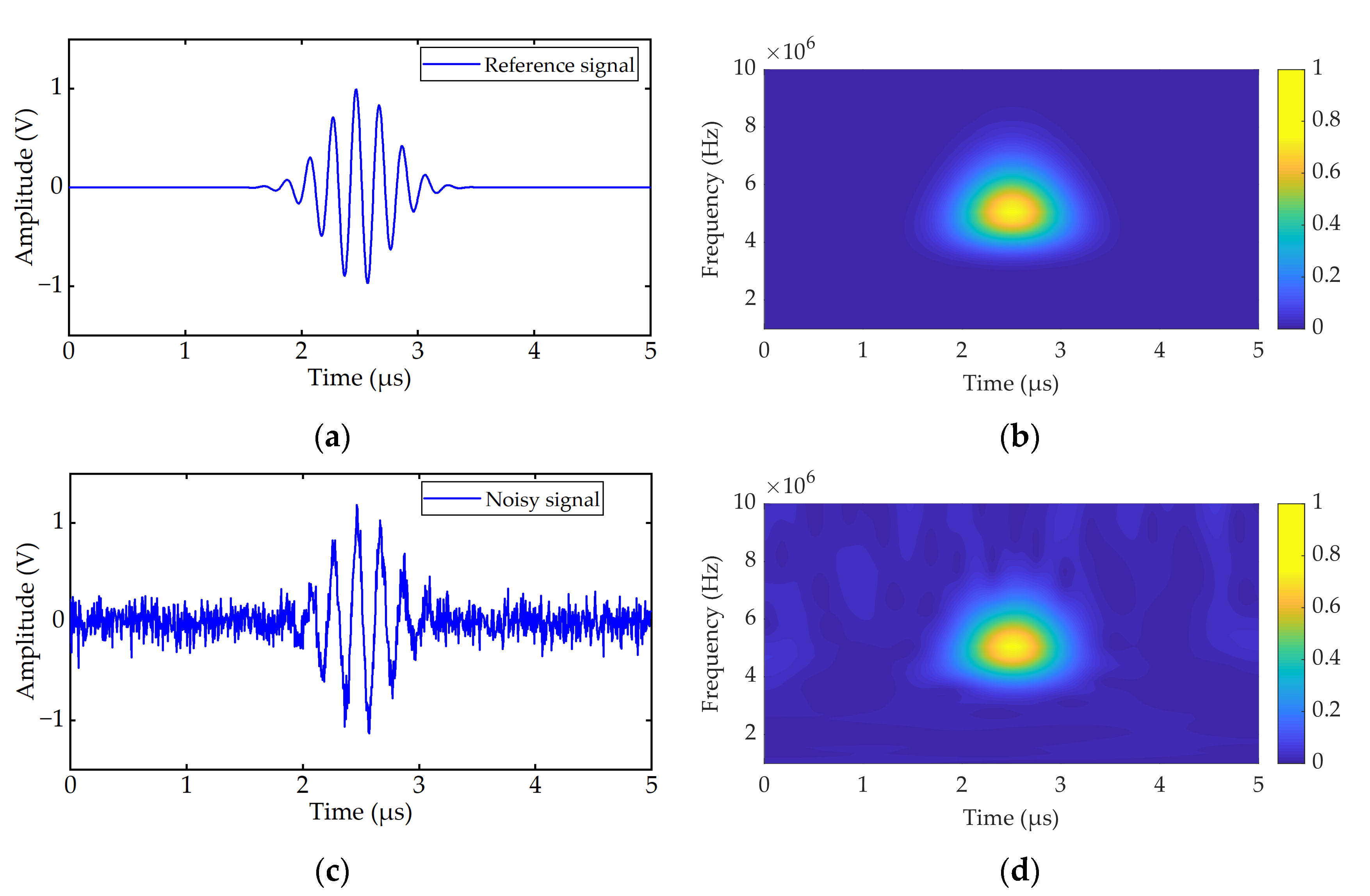
4.1.1. Simulation Experiment
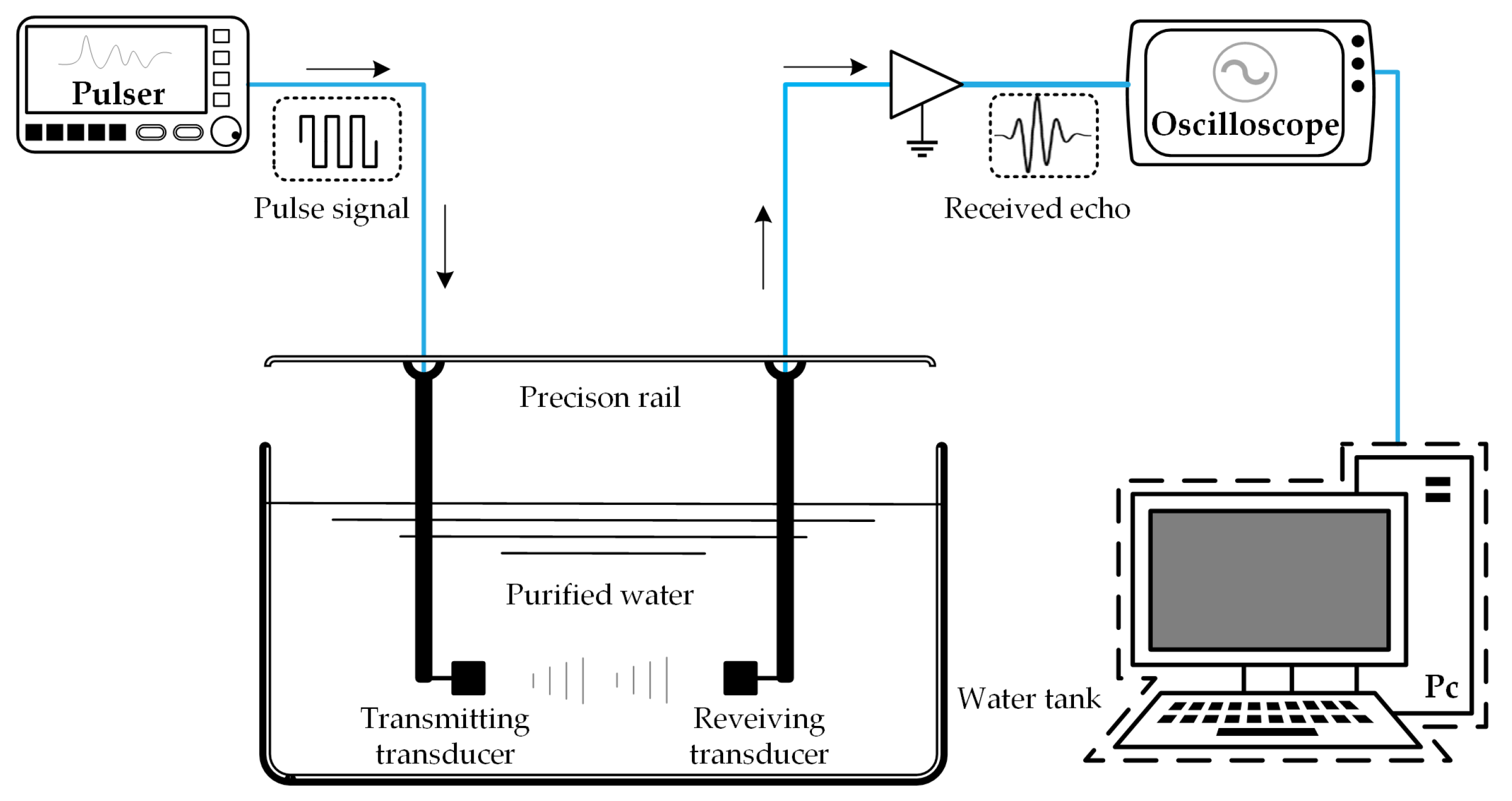
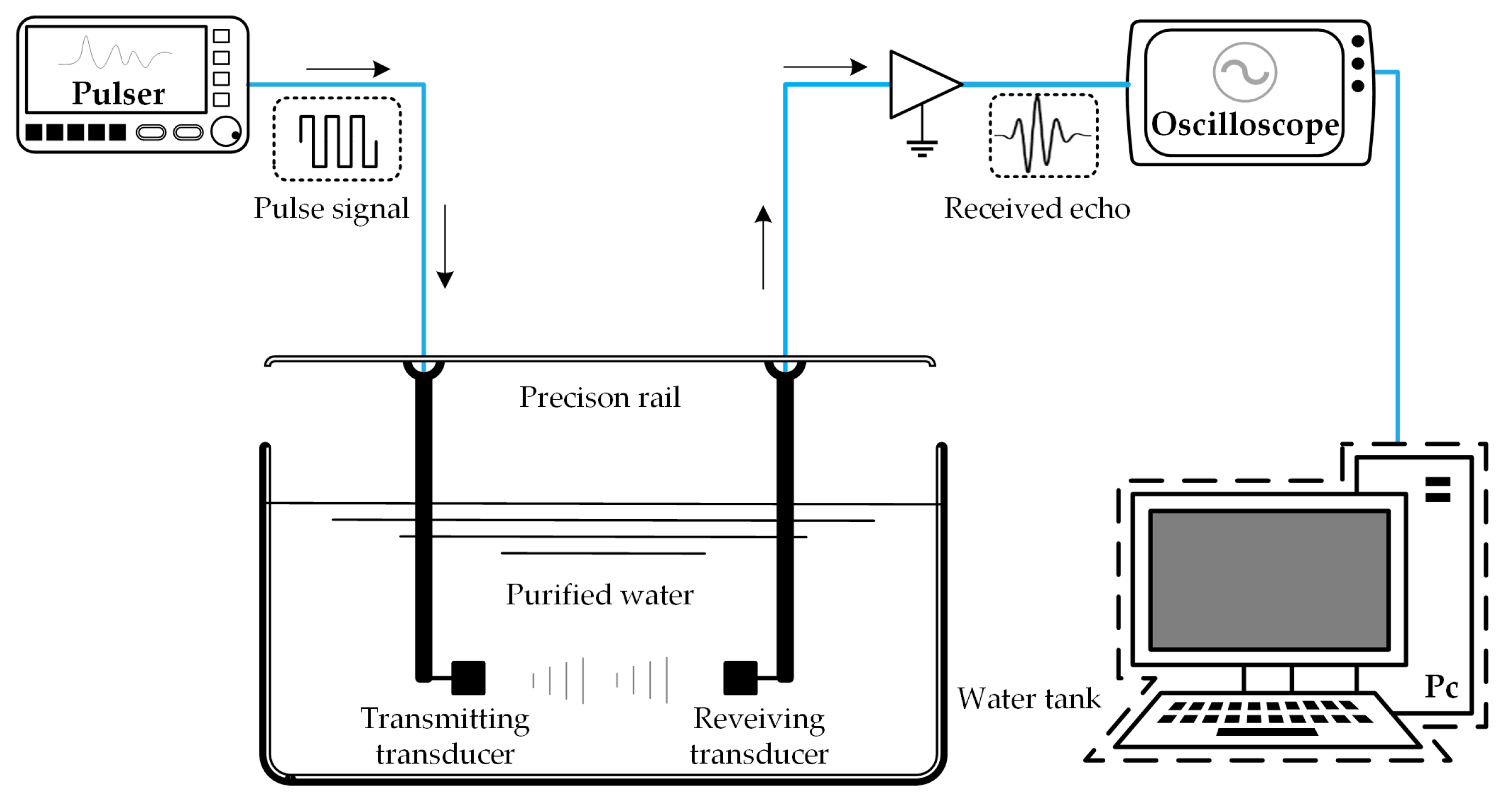
4.1.2. Physical Experiment
4.2. Performance Criteria
5. Results and Discussion
5.1. Assessment on Synthetic Data
5.2. Assessment on Real-World Data
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, H.; Xu, B.; Zhou, T.; Mo, Y.L. Debonding detection for rectangular CFST using surface wave measurement: Test and multi-physical fields numerical simulation. Mech. Syst. Signal Proc. 2019, 117, 238–254. [Google Scholar] [CrossRef]
- Searfass, C.T.; Pheil, C.; Sinding, K.; Tittmann, B.R.; Baba, A.; Agrawal, D.K. Bismuth titanate fabricated by spray-on deposition and microwave sintering for high-temperature ultrasonic transducers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2015, 63, 139–146. [Google Scholar] [CrossRef]
- Zhang, Z.; Xu, J.; Yang, L.; Liu, S.; Xiao, J.; Li, X.; Wang, X.A.; Luo, H. Design and comparison of PMN-PT single crystals and PZT ceramics based medical phased array ultrasonic transducer. Sens. Actuator A-Phys 2018, 283, 273–281. [Google Scholar] [CrossRef]
- Wang, B.; Zhong, S.; Lee, T.L.; Fancey, K.S.; Mi, J. Non-destructive testing and evaluation of composite materials/structures: A state-of-the-art review. Adv. Mech. Eng. 2020, 12, 1687814020913761. [Google Scholar] [CrossRef] [Green Version]
- Rehman, S.K.U.; Ibrahim, Z.; Memon, S.A.; Jameel, M. Nondestructive test methods for concrete bridges: A review. Constr. Build. Mater. 2016, 107, 58–86. [Google Scholar] [CrossRef] [Green Version]
- Marcantonio, V.; Monarca, D.; Colantoni, A.; Cecchini, M. Ultrasonic waves for materials evaluation in fatigue, thermal and corrosion damage: A review. Mech. Syst. Signal Proc. 2019, 120, 32–42. [Google Scholar] [CrossRef]
- Pillarisetti, L.S.S.; Talreja, R. On quantifying damage severity in composite materials by an ultrasonic method. Compos. Struct. 2019, 216, 213–221. [Google Scholar] [CrossRef]
- Al-Aufi, Y.A.; Hewakandamby, B.N.; Dimitrakis, G.; Holmes, M.; Watson, N.J. Thin film thickness measurements in two phase annular flows using ultrasonic pulse echo techniques. Flow Meas. Instrum. 2019, 66, 67–78. [Google Scholar] [CrossRef]
- Wronkowicz, A.; Dragan, K.; Lis, K. Assessment of uncertainty in damage evaluation by ultrasonic testing of composite structures. Compos. Struct. 2018, 203, 71–84. [Google Scholar] [CrossRef]
- Derra, M.; Bakkali, F.; Amghar, A.; Sahsah, H. Estimation of coagulation time in cheese manufacture using an ultrasonic pulse-echo technique. J. Food Eng. 2017, 216, 65–71. [Google Scholar] [CrossRef]
- Sudarshan, V.K.; Mookiah, M.R.K.; Acharya, U.R.; Chandran, V.; Molinari, F.; Fujita, H.; Ng, K.H. Application of wavelet techniques for cancer diagnosis using ultrasound images: A review. Comput. Biol. Med. 2016, 69, 97–111. [Google Scholar] [CrossRef] [PubMed]
- Wu, B.; Huang, Y.; Krishnaswamy, S. A Bayesian approach for sparse flaw detection from noisy signals for ultrasonic NDT. NDT E Int. 2017, 85, 76–85. [Google Scholar] [CrossRef]
- Lu, Z.; Yang, C.; Qin, D.; Luo, Y.; Momayez, M. Estimating ultrasonic time-of-flight through echo signal envelope and modified Gauss Newton method. Measurement 2016, 94, 355–363. [Google Scholar] [CrossRef]
- Fierro, G.M.; Ciampa, F.; Ginzburg, D.; Onder, E.; Meo, M. Nonlinear ultrasound modelling and validation of fatigue damage. J. Sound Vibr. 2015, 343, 121–130. [Google Scholar] [CrossRef] [Green Version]
- Bybi, A.; Mouhat, O.; Garoum, M.; Drissi, H.; Grondel, S. One-dimensional equivalent circuit for ultrasonic transducer arrays. Appl. Acoust. 2019, 156, 246–257. [Google Scholar] [CrossRef]
- Lu, Z.; Ma, F.; Yang, C.; Chang, M. A novel method for Estimating Time of Flight of ultrasonic echoes through short-time Fourier transforms. Ultrasonics 2020, 103, 106104. [Google Scholar] [CrossRef] [PubMed]
- Lu, Z.; Yang, C.; Qin, D.; Luo, Y. Estimating the parameters of ultrasonic echo signal in the Gabor transform domain and its resolution analysis. Signal Process. 2016, 120, 607–619. [Google Scholar] [CrossRef]
- Zhou, J.; Zhang, X.; Zhang, G.; Chen, D. Optimization and Parameters Estimation in Ultrasonic Echo Problems Using Modified Artificial Bee Colony Algorithm. J. Bionic Eng. 2015, 12, 160–169. [Google Scholar] [CrossRef]
- Qi, A.L.; Zhang, G.M.; Dong, M.; Ma, H.W.; Harvey, D.M. An artificial bee colony optimization based matching pursuit approach for ultrasonic echo estimation. Ultrasonics 2018, 88, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.; Zhang, C.; Wang, C.; Sun, A.; Ju, B.F.; Shen, Q. Simultaneous ultrasonic parameter estimation of a multi-layered material by the PSO-based least squares algorithm using the reflection spectrum. Ultrasonics 2019, 91, 231–236. [Google Scholar] [CrossRef] [PubMed]
- Ali, M.S.S.A.; Kumar, A.; Rajagopal, P. Signal noise based transfer function approach for reliability estimation of ultrasonic inspection. Ultrasonics 2019, 96, 276–283. [Google Scholar]
- Li, J.; Liu, C.; Zeng, Z.; Chen, L. GPR signal denoising and target extraction with the CEEMD method. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1615–1619. [Google Scholar]
- Zheng, H.; Dang, C.; Gu, S.; Peng, D.; Chen, K. A quantified self-adaptive filtering method: Effective IMFs selection based on CEEMD. Meas. Sci. Technol. 2018, 29, 085701. [Google Scholar] [CrossRef]
- San Emeterio, J.L.; Rodriguez-Hernandez, M.A. Wavelet Cycle Spinning Denoising of NDE Ultrasonic Signals Using a Random Selection of Shifts. J. Nondestruct. Eval. 2015, 34, 270. [Google Scholar] [CrossRef] [Green Version]
- Cooper, J.; Tran, A.N.; Wallander, S. Testing for specification bias with a flexible Fourier transform model for crop yields. Am. J. Agric. Econ. 2017, 99, 800–817. [Google Scholar] [CrossRef] [Green Version]
- Salih, S.K.; Aljunid, S.A.; Aljunid, S.M.; Maskon, O. Adaptive filtering approach for denoising electrocardiogram signal using moving average filter. J. Med. Imaging Health Inform. 2015, 5, 1065–1069. [Google Scholar] [CrossRef]
- Rhif, M.; Ben Abbes, A.; Farah, I.R.; Martínez, B.; Sang, Y. Wavelet transform application for/in non-stationary time-series analysis: A review. Appl. Sci.-Basel 2019, 9, 1345. [Google Scholar] [CrossRef] [Green Version]
- Huang, N.E.; Wu, Z. A review on Hilbert-Huang transform: Method and its applications to geophysical studies. Rev. Geophys. 2008, 46, 1–23. [Google Scholar] [CrossRef] [Green Version]
- Hu, X.; Peng, S.; Hwang, W.L. EMD revisited: A new understanding of the envelope and resolving the mode-mixing problem in AM-FM signals. IEEE Trans. Signal Process. 2011, 60, 1075–1086. [Google Scholar]
- Imaouchen, Y.; Kedadouche, M.; Alkama, R.; Thomas, M. A frequency-weighted energy operator and complementary ensemble empirical mode decomposition for bearing fault detection. Mech. Syst. Signal Proc. 2017, 82, 103–116. [Google Scholar] [CrossRef]
- Wang, T.; Zhang, M.; Yu, Q.; Zhang, H. Comparing the applications of EMD and EEMD on time–frequency analysis of seismic signal. J. Appl. Geophys. 2012, 83, 29–34. [Google Scholar] [CrossRef]
- Yeh, J.R.; Shieh, J.S.; Huang, N.E. Complementary ensemble empirical mode decomposition: A novel noise enhanced data analysis method. Adv. Data Anal. 2010, 2, 135–156. [Google Scholar] [CrossRef]
- Chen, J.; Zhou, D.; Lyu, C.; Lu, C. An integrated method based on CEEMD-SampEn and the correlation analysis algorithm for the fault diagnosis of a gearbox under different working conditions. Mech. Syst. Signal Proc. 2018, 113, 102–111. [Google Scholar] [CrossRef]
- Demirli, R.; Saniie, J. Model-based estimation of ultrasonic echoes. Part I: Analysis and algorithms. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2001, 48, 787–802. [Google Scholar] [CrossRef]
- Yazdani, M.; Kahraman, C.; Zarate, P.; Onar, S.C. A fuzzy multi attribute decision framework with integration of QFD and grey relational analysis. Expert Syst. Appl. 2019, 115, 474–485. [Google Scholar] [CrossRef] [Green Version]
- Daubechies, I.; Lu, J.; Wu, H.T. Synchrosqueezed wavelet transforms: An empirical mode decomposition-like tool. Appl. Comput. Harmon. Anal. 2011, 30, 243–261. [Google Scholar] [CrossRef] [Green Version]
- Thakur, G.; Brevdo, E.; Fučkar, N.S.; Wu, H.T. The synchrosqueezing algorithm for time-varying spectral analysis: Robustness properties and new paleoclimate applications. Signal Process. 2013, 93, 1079–1094. [Google Scholar] [CrossRef] [Green Version]
- Donoho, D.L.; Johnstone, J.M. Ideal spatial adaptation by wavelet shrinkage. Biometrika 1994, 81, 425–455. [Google Scholar] [CrossRef]
- Panić, B.; Klemenc, J.; Nagode, M. Improved initialization of the EM algorithm for mixture model parameter estimation. Mathematics 2020, 8, 373. [Google Scholar] [CrossRef] [Green Version]
- Grimes, M.; Bouhadjera, A.; Haddad, S.; Benkedidah, T. In vitro estimation of fast and slow wave parameters of thin trabecular bone using space-alternating generalized expectation–maximization algorithm. Ultrasonics 2012, 52, 614–621. [Google Scholar] [CrossRef]
- Lee, S.; Kim, J.; Lee, M. A real-time ECG data compression and transmission algorithm for an e-health device. IEEE Trans. Biomed. Eng. 2011, 58, 2448–2455. [Google Scholar] [PubMed]
- Zhou, H.; Deng, Z.; Xia, Y.; Fu, M. A new sampling method in particle filter based on Pearson correlation coefficient. Neurocomputing 2016, 216, 208–215. [Google Scholar] [CrossRef]
- Willmott, C.J.; Matsuura, K. Advantages of the mean absolute error (MAE) over the root mean square error (RMSE) in assessing average model performance. Clim. Res. 2005, 30, 79–82. [Google Scholar] [CrossRef]
- Olofsson, T. Deconvolution and model-based restoration of clipped ultrasonic signals. IEEE Trans. Instrum. Meas 2005, 54, 1235–1240. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Units | Description |
|---|---|---|---|
| Amplitude | According to the impedance of the transducer. | ||
| Bandwidth factor | Establishes the bandwidth of the echo. | ||
| Arrival time | Dependent on the location of the transducer. | ||
| Center frequency | Related to the frequency characteristics of the transducer. | ||
| Phase | Reflects the orientation of the echo received. |
| Noisy Signal SNR (dB) | BayesShrink Threshold | Denoised Signal SNR (dB) | RMSE | PRD (%) |
|---|---|---|---|---|
| 0 | 1.554 | 11.286 | 0.061 | 27.271 |
| 2.5 | 0.967 | 13.262 | 0.048 | 21.722 |
| 5 | 0.573 | 16.635 | 0.033 | 14.782 |
| 7.5 | 0.458 | 18.976 | 0.025 | 11.165 |
| 10 | 0.282 | 20.934 | 0.020 | 8.992 |
| 12.5 | 0.193 | 22.047 | 0.018 | 7.878 |
| 15 | 0.134 | 25.365 | 0.012 | 5.384 |
| 17.5 | 0.092 | 26.574 | 0.010 | 4.723 |
| 20 | 0.052 | 29.077 | 0.008 | 3.531 |
| 22.5 | 0.026 | 31.123 | 0.006 | 2.796 |
| 25 | 0.020 | 35.416 | 0.004 | 1.696 |
| 27.5 | 0.011 | 35.353 | 0.004 | 1.711 |
| 30 | 0.007 | 38.597 | 0.003 | 1.175 |
| Simulated Signal | Echo Parameter Evaluation | Estimated Model Evaluation | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Estimated Value | AE | |RE| (%) | RMSE | PCC | MAE (%) | ACP | |||
| SNR = 0 dB | 0.958 | 0.042 | 4.233 | 0.961 | 0.065 | 0.959 | 4.496 | 0.922 | |
| 6.568 | 0.068 | 1.045 | |||||||
| 2.507 | 0.007 | 0.276 | |||||||
| 5.017 | 0.017 | 0.345 | |||||||
| 1.166 | 0.166 | 16.580 | |||||||
| SNR = 5 dB | 0.999 | 0.001 | 0.146 | 0.982 | 0.051 | 0.981 | 4.640 | 0.930 | |
| 6.983 | 0.483 | 7.429 | |||||||
| 2.504 | 0.004 | 0.146 | |||||||
| 4.965 | 0.035 | 0.694 | |||||||
| 1.148 | 0.148 | 14.786 | |||||||
| SNR = 10 dB | 1.006 | 0.006 | 0.618 | 0.992 | 0.047 | 0.981 | 1.906 | 0.948 | |
| 6.732 | 0.232 | 3.566 | |||||||
| 2.502 | 0.002 | 0.060 | |||||||
| 4.998 | 0.002 | 0.038 | |||||||
| 1.053 | 0.053 | 5.246 | |||||||
| SNR = 15 dB | 0.994 | 0.006 | 0.604 | 0.997 | 0.046 | 0.982 | 1.985 | 0.954 | |
| 6.422 | 0.079 | 1.207 | |||||||
| 2.503 | 0.002 | 0.098 | |||||||
| 4.994 | 0.006 | 0.121 | |||||||
| 1.079 | 0.079 | 7.895 | |||||||
| SNR = 20 dB | 0.988 | 0.012 | 1.175 | 0.999 | 0.047 | 0.983 | 0.495 | 0.960 | |
| 6.478 | 0.022 | 0.339 | |||||||
| 2.499 | 0.001 | 0.023 | |||||||
| 5.000 | 0.001 | 0.006 | |||||||
| 0.991 | 0.009 | 0.932 | |||||||
| Parameters and Criteria | LSE | ABC | ACO | ABIDE |
|---|---|---|---|---|
| 1.015 | 1.010 | 1.010 | 0.988 | |
| 6.631 | 6.601 | 6.587 | 6.478 | |
| 2.514 | 2.503 | 2.503 | 2.499 | |
| 4.983 | 5.012 | 4.991 | 5.000 | |
| 1.011 | 1.021 | 0.990 | 0.991 | |
| 3776 | 4602 | 6253 | 2811 | |
| MAE | 1.104% | 0.983% | 0.742% | 0.495% |
| Parameters and Criteria | LSE | ABC | ACO | ABIDE |
|---|---|---|---|---|
| 0.763 | 0.761 | 0.761 | 0.759 | |
| 0.305 | 0.299 | 0.276 | 0.280 | |
| 16.621 | 16.609 | 16.604 | 16.609 | |
| 1.067 | 1.098 | 1.053 | 1.094 | |
| 2.030 | 2.009 | 1.979 | 1.965 | |
| 0.981 | 0.982 | 0.982 | 0.985 | |
| RMSE | 0.018 | 0.016 | 0.015 | 0.017 |
| PCC | 0.979 | 0.988 | 0.990 | 0.990 |
| 5981 | 6224 | 7320 | 5526 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiao, Y.; Li, Z.; Zhu, J.; Xue, B.; Zhang, B. ABIDE: A Novel Scheme for Ultrasonic Echo Estimation by Combining CEEMD-SSWT Method with EM Algorithm. Sustainability 2022, 14, 1960. https://doi.org/10.3390/su14041960
Jiao Y, Li Z, Zhu J, Xue B, Zhang B. ABIDE: A Novel Scheme for Ultrasonic Echo Estimation by Combining CEEMD-SSWT Method with EM Algorithm. Sustainability. 2022; 14(4):1960. https://doi.org/10.3390/su14041960
Chicago/Turabian StyleJiao, Yingkui, Zhiwei Li, Junchao Zhu, Bin Xue, and Baofeng Zhang. 2022. "ABIDE: A Novel Scheme for Ultrasonic Echo Estimation by Combining CEEMD-SSWT Method with EM Algorithm" Sustainability 14, no. 4: 1960. https://doi.org/10.3390/su14041960
APA StyleJiao, Y., Li, Z., Zhu, J., Xue, B., & Zhang, B. (2022). ABIDE: A Novel Scheme for Ultrasonic Echo Estimation by Combining CEEMD-SSWT Method with EM Algorithm. Sustainability, 14(4), 1960. https://doi.org/10.3390/su14041960