1. Introduction
Since the first appearance of road vehicles, automation functionality has continuously been developing and evolving. The use of autonomous vehicles (AVs) in road transport is increasing because of their contribution to road safety and the potential to lower the number of casualties due to the elimination of human error. Besides safety, AVs could also help reduce traffic congestion, increase productivity, and provide transportation accessibility. Nevertheless, automating the driving process is a complex task involving numerous challenges that need to be tackled to facilitate the widespread adoption of AVs. Apart from the technological issues, the psychological, policy, and regulatory challenges should be tackled simultaneously. Psychological concerns, which may be the main barrier to mass adoption of AVs, refer primarily to the trust issues and public concern for personal safety and security [
1]. Additional studies in the public acceptance and willingness may identify the necessary measures that will contribute to the widespread adoption of AVs. Besides the availability, transport policy can help shape positive public opinion on AVs. Increasing the funding for initiatives involving education, marketing, advertising, compatibility, and process simplification can result in new, effective transportation policies that can stir the public sentiment towards widespread acceptance [
2].
Additionally, adaptive regulations must be developed incorporating both the latest knowledge and safety requirements and technological advancement [
3]. Under the new regulations, testing standards must address a wider range of real-world scenarios, such as the absence of connectivity. Currently, it is unclear whether an AV is capable of avoiding crashes without connectivity with surrounding vehicles (V2V) or infrastructure (I2V) [
4]. Thus, reaching the goal of widespread use of AVs requires not only advancement in AV technology but also other AV-interlinking areas/technologies.
AV must be able to analyse the surrounding area and manoeuvre safely with minimum or no human interaction [
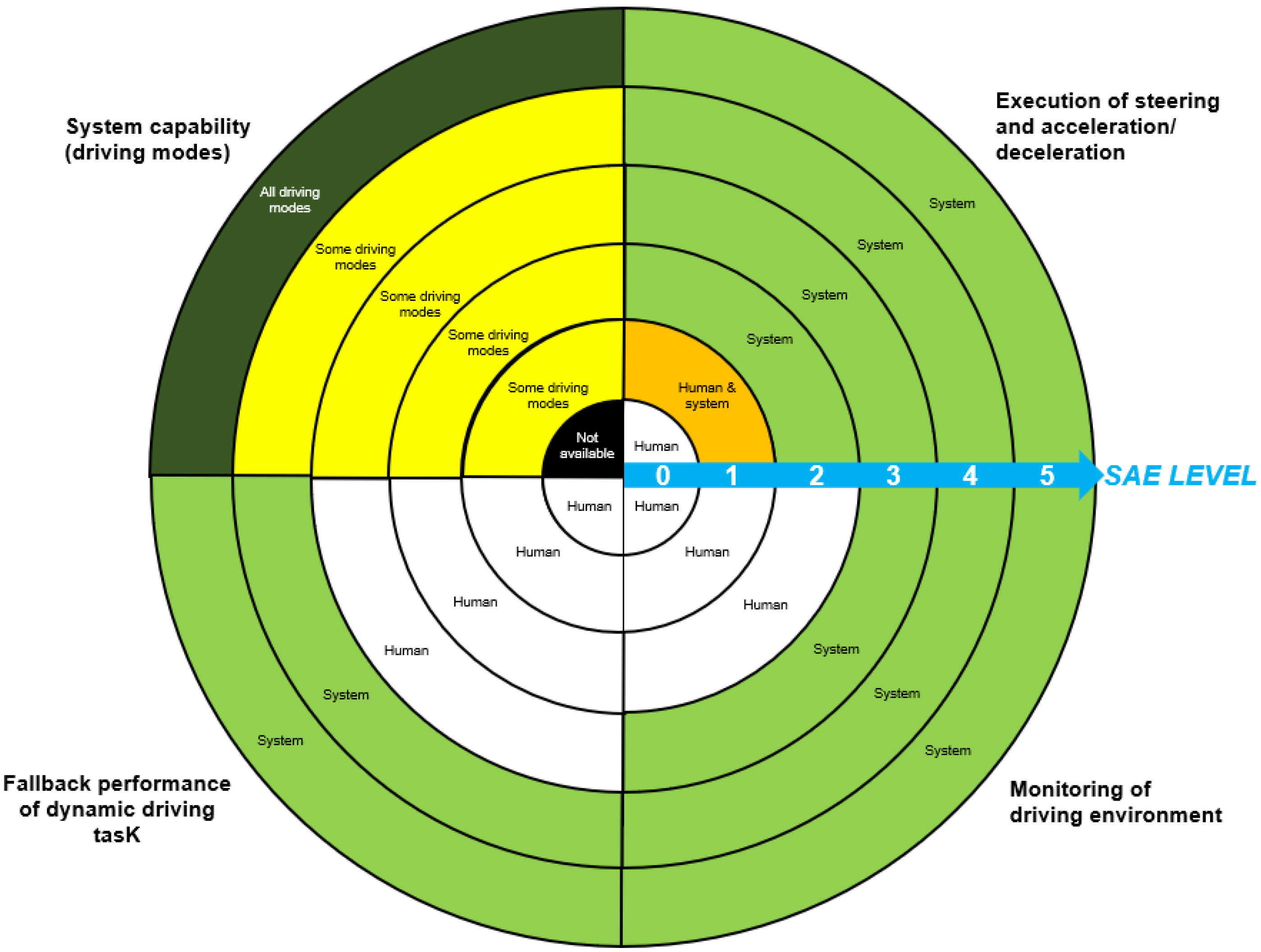
5]. Referring to the on-road motor vehicles, six levels of automation have been defined by the Society of Automotive Engineers (SAE), published in SAE J3016.
Figure 1 illustrates these six levels, starting from Level 0, which requires full human attention and input, to fully automated Level 5 [
6]. Level 2 is the highest level of vehicle automation currently in production, although recently, Honda (Tokyo, Japan) became the first to produce a road vehicle equipped with Level 3 self-driving technology [
7]. Levels 4 and 5 are yet to be achieved through testing, research, and development in the coming years.
As of 2021, most manufacturers involved with AVs are conducting tests on public roads. Findings and inputs from these tests can be valuable in revising and developing the infrastructures, regulations, and public opinion. Companies such as Waymo (Mountain View, CA, USA) are conducting testing in public areas permitted by the government [
8]. Germany has started testing AVs up to Level 4 on public roads with speed limits of up to 130 km/h that require a human driver’s oversite [
9]. Facilitating AV testing on the public road requires multigroup involvement, including manufacturers and testing organisations, government, various safety authorities, and the public.
With numerous countries undergoing AV public road testing, there must be some common ground where their regulations and guidelines overlap. Hence, to formulate a global and complete set of guidelines, a study of the relevance of individual regulations and their adaptability must be conducted. This is because public testing is required in order to allow AVs’ deployment in the real world. Since AVs are expected to have minimal or no driver’s input, validating their usage in the real world is critically important. Traditionally, test results act as indicators of a vehicle’s road safety; however, that is not the case with AVs where the safety assurance is acquired in real-mileage testing [
10]. Deploying AVs in a simulated environment may be insufficient as it is still essentially conducted under controlled conditions. Thus, the question of concise and complete legislation enabling AV real-road testing arises.
Different countries have different strategies and component requirements for public road-testing guidelines. Some aspects considered important in one set of guidelines may not even be mentioned in another, potentially leading to safety hazards when testing is executed. Emphasizing safety is key in legislation and policy making and is crucial for conducting successful testing practices. In case of accidents, the testing organisation would be responsible for liabilities. Ideally, synthesising various policies would potentially result in a concise and complete set of guidelines acting as a global framework for countries developing AV testing guidelines. Hence, countries could draw upon and adapt these regulations based on their suitability within their own context. National authorities would benefit greatly from relying on this global standard as an underlying framework already in place, leaving only suitability issues to be considered. Resources could then be diverted to researching suitability and supporting infrastructural aspects of AV deployment. Testing companies could use this global tool as a preliminary reference prior to consulting the local authorities. It would also serve as a good basis to educate the community on AV public road testing.
For this study, an initial database search was conducted focusing on publicly available AV testing guidelines data in the English Language, excluding policy, regulation, procedure, and standard documents. The initial database search result was screened for guidelines published by government/agency/authority in public road-testing applications only. Considering the differences in policies and regulation between the countries and regions, this study finally selected Australia, Canada, and the United Kingdom for the review, representing Asia Pacific, North America, and Europe. The purpose of this research was to identify and highlight the regulatory differences in their AV testing guideline and to draft a synthesised framework that could be referred to and adapted by many countries.
2. Background
In the early 1900s, Norman Bel Geddes deployed the first self-driving car, an electric vehicle guided by radio-controlled electromagnetic fields generated with magnetized metal spikes embedded in the roadway, during the General Motors exhibition in 1939 [
11]. Further advancements in AV were apparent in the 1950s when RCA Laboratories and the state of Nebraska tested an AV on a 122-m stretch of road with embedded metal wires [
12]. In the 1960s, United Kingdom’s Transport and Road Research Laboratory and Citroen tested a Citroen Ds model, which drove autonomously 130 km/h using magnetic cables embedded in the road [
13]. In the following decade, manufacturers started to include advanced technologies such as neural networks in AV control, the precursors of the technologies currently used in AV. The Prometheus project by the Daimler group used a Mercedes-Benz van as a test vehicle and managed to autonomously drive up to 63 km/h on traffic-less roads [
14]. The Defense Advanced Research Projects Agency (DARPA) also tested an autonomous land vehicle using lidar, computer vision, and automated control [
15].
Based on the previous development, the United States Congress approved the Intermodal Surface Transportation Efficiency Act of 1991 (ISTEA) that guides the United States Department of Transport to conduct AV system testing and highway road testing in 1997. This Act led to a demonstration of 20 AVs in San Diego, California [
16]. In addition, Daimler-Benz successfully tested autonomous driving in free lanes, convoy driving, and lane changes with autonomous passing under normal traffic conditions, with human supervision and inputs only in certain circumstances [
14]. Within the same decade, numerous institutions and organisations started conducting tests on vehicles with different levels of autonomy over long distances. In the 2000s, DARPA conduct tests in urban environments to simulate traffic congestions and other real-world conditions [
17]. In 2009, Google conducted their first AV testing that was publicly announced only in 2012 in Nevada 2012 [
18]. Later in 2010, the Institute of Control Engineering of the Technische Universität Braunschweig publicly tested AV driving in Germany [
19]. Due to the increasing number of testing activities in the real world, California’s Department of Motor Vehicles (DMV) noted that their 2010 regulations had not considered AVs, and therefore, certain aspects of the regulations may not be relevant due to the advancement of AV technologies [
20]. This indicated the need for developing the regulatory framework for AV testing. As a result, Nevada became the first state to pass a law on AV testing on public roads in 2011, which came into effect in 2012. In the same year, Google registered their AV with the Nevada DMV, which requires a driver to be present in the AV to monitor the testing [
21,
22]. Florida and California became the next two states to allow public AV testing [
23].
Testing of partially autonomous vehicles or driver assistance systems became widespread among large manufacturers throughout the 2010s. In 2014, SAE International published a classification system for AV with levels ranging from manual to fully autonomous systems called the J3016 [
6]. In August 2016, Singapore launched the first self-driving public taxi service, provided by nuTonomy, a spin-off company of the Massachusetts Institute of Technology (MIT) [
24]. In the same year, the province of Ontario, Canada, officially allowed AVs to be tested on public roads with a driver present to monitor the testing [
25]. In 2017, Canada’s first fully AV was publicly tested within a closed section of a public road [
26]. As the global number of AV testing is growing and is expected to significantly increase in the near future, a synthesized testing guideline would seem a welcomed and valuable reference tool to all the parties attempting to implement public road testing worldwide.
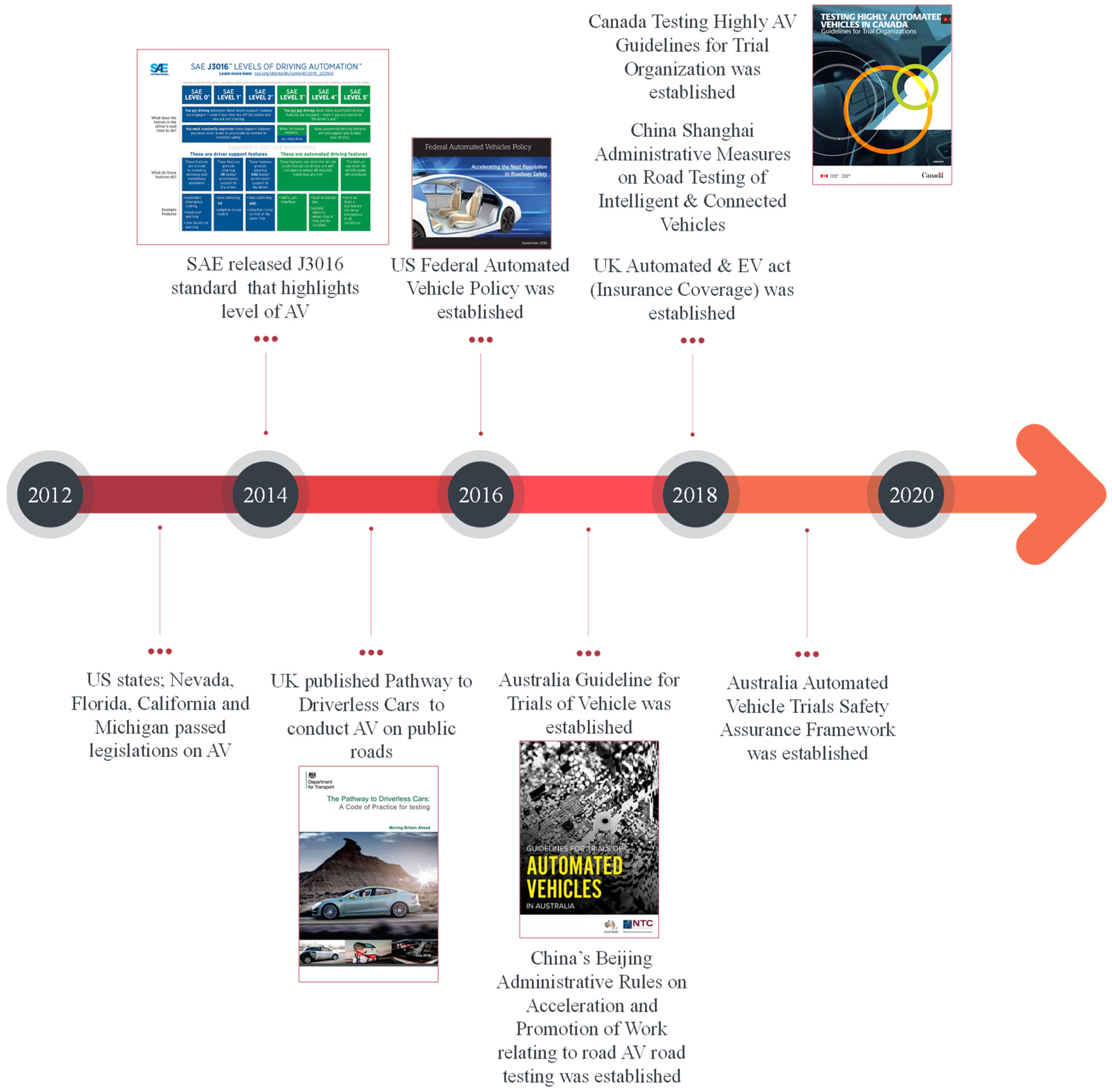
Figure 2 illustrates the aforementioned milestones of AV road testing history, from a radio-controlled vehicle of the 1930s to the existing AV testing procedures and policies of the 2010s.
Similar to other technology development, AV testing must be conducted to confirm and validate their ability and reliability, especially in terms of safety under real-world conditions. The safest AV testing method is to conduct the test within a controlled environment, such as in a dedicated area with simulated traffic, replicating the real-world road conditions. However, testing within controlled environments should not be the primary approach because it lacks many factors found in real-world conditions. Controlled or simulated environments could not replicate the uncertainties and unpredictability characteristic of uncontrolled situations. For example, the reactions of other road users may depend on factors such as emotions, habits, current physical and mental conditions and circumstances. In the simulated environment, almost all variables are controlled, bringing into question the validity of the results obtained within “fake city” environments. Hence, the need for AV testing to be conducted in the real world and the deployments of many testing organisations on public roads.
Ultimately, the synthesised global AV testing framework would contribute to designing the national guidelines for AV public road testing. Countries covered in this research include Australia, Canada, and United Kingdom. Australia’s national guideline, the “Guidelines for Trials of Automated Vehicles in Australia 2020”, aims to guide the testing organisations and local authorities in the upkeep of testing safety and requirements. The guideline also acts as encouragement in innovation and, at the same time, maintains the safety of AV testing in Australia [
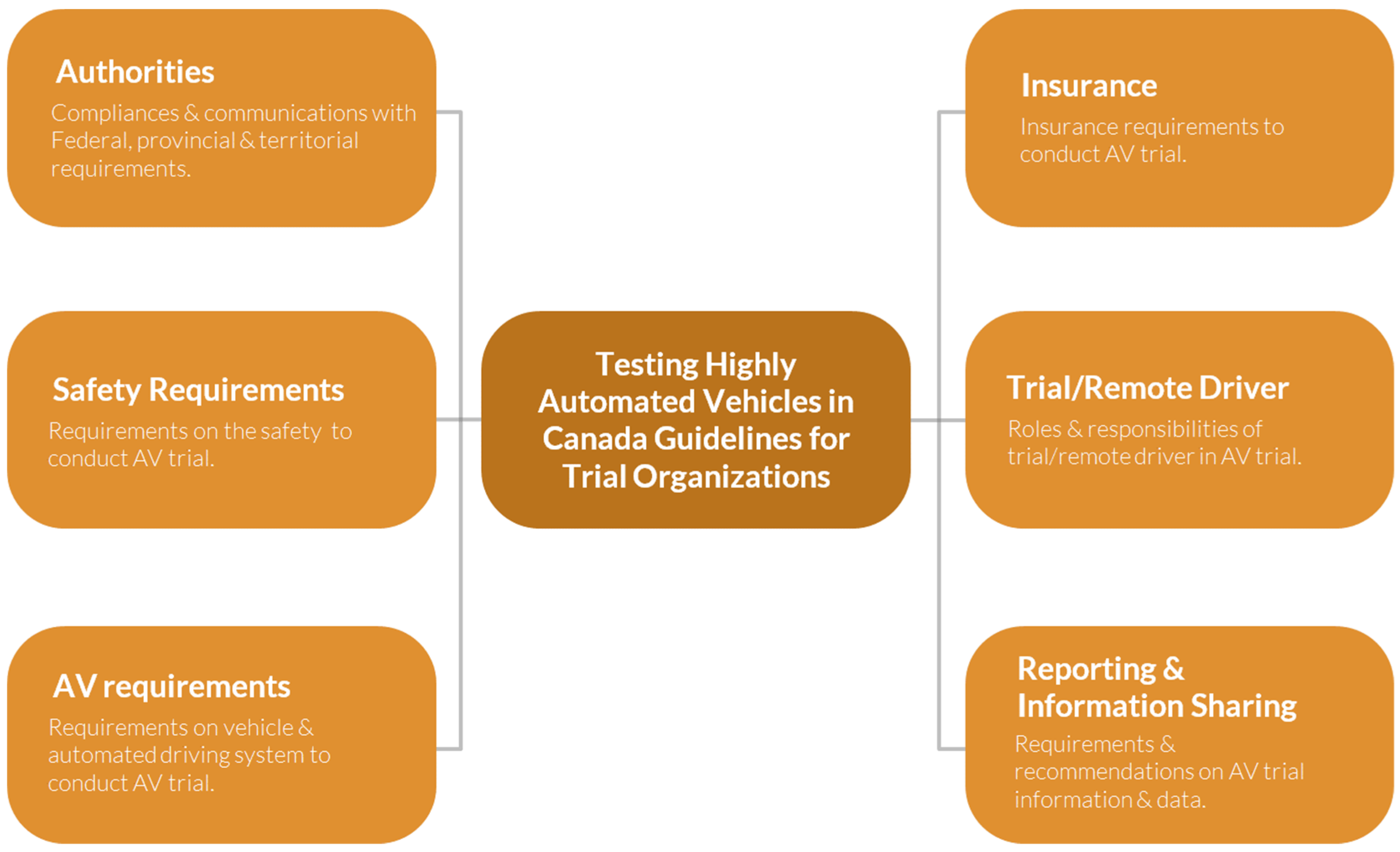
27]. “Canada’s Safety Framework for Automated and Connected Vehicles” is a multilayered framework that covers three areas of general testing, the jurisdictional authorities, and the testing organisation themselves. Such a flexible system allows for customising policies that suit different environments. The United Kingdom’s guideline, “The Pathway to Driverless Cars: A Code of Practice for testing”, is a framework helping the testing organisation by providing clear guidelines and recommendations for implementing key actions and procedures during the pretesting, testing, and post-testing phase [
28].
Figure 3 presents Australia, Canada, and the United Kingdom guidelines in a timeframe, among other AV-related documents. Following the release of the SAE J3016 standard in 2014, the United Kingdom released their guideline in 2015, Australia in 2017, and Canada in 2018. It is expected that the existing guidelines will be regularly updated, and many more will be established worldwide.
4. Synthesis of Guidelines and Recommendations
AVs are considered the future of transport; thus, public road testing is the best platform to assess their actual performance in preparing for the real world while prioritizing safety above all. Part of the effort to safely conduct public road testing is establishing guidelines that are not only related to the testing organisation but also to the related authorities and communities. Australia, Canada, and United Kingdom have released guidelines that share a common safety goal, among others. The purpose of AV guidelines is to facilitate making policies and standards that all testing organisations must comply with. Hence, a concise set of guidelines would give the testing organisation a clear indicator of appropriate steps to be taken, covering multiple overlapping areas. To facilitate AV testing and deployments on public roads, several clarifications are required for all parties: testing organisations, authorities, and communities. Based on the review of guidelines from Australia, Canada, and the United Kingdom, this study has synthesized the guidelines into seven topics, as shown in
Figure 7.
4.1. Testing Processes
Guidelines from Australia and Canada were developed by the federal authority, but the jurisdiction for the approval and permits of AV public road testing lies with the local authorities. The testing organisation should engage with the relevant local authorities collaborating on the specific requirement related to testing processes, the requirements, and the test reporting guidelines. The procedures among the authorities may vary, and the existing guidelines provide only the general information for the testing organisation to follow and for the local authorities to consider adopting. To ease the testing challenges, the local authorities should agree to implement common procedures and guidelines that clearly state the common purposes and necessary steps to be taken by the testing organisations and all involved parties, resulting in more effective and efficient testing management procedures.
4.2. Testing Location
Although the testing of AVs is conducted on a public road, some limitations are apparent. Based on the reviewed guideline, testing locations are not restricted to particular areas, and testing organisations are required to obtain location authorisations. As AVs need a connection to infrastructures, the testing organisation should conduct, in advance, a thorough study to identify a suitable testing route and area before submitting their location permit applications. Identifying road types and environmental conditions benefits the authorities as well as it highlights the capabilities of the AV being tested. Certain areas do not cater to the infrastructure required to operate AV. Countries such as Australia, Canada, and the United Kingdom require the testing organisation to describe the Operational Design Domain (ODD) to the local authorities. A guideline should address the need for the ODD to include the geographical location, road type, traffic conditions, environmental conditions, time of testing, and level of technology being used, among others. Local authorities would be able to advise on the suitability of the proposed areas or suggest other locations based on the information contained in the ODD to facilitate the testing and address any other constraints such as weather and traffic abnormalities. Challenges related to location suitability may lead to mishaps and accidents that could be avoided by identifying and exchanging information between the testing organisation and local authorities on the suitability and capabilities of any given location. Responsibility for selecting a suitable testing location should be equally shared by both the testing organisation and the local authorities.
4.3. Regulations and Authorities
The current state of AV testing worldwide requires the testing organisation to refer to different authorities depending on the testing location. Although this is necessary as different states may have different rules, it is recommended that the organisation has a single contact point for testing. Australia has its guidelines issued by NTC Australia; however, local authorities must be contacted to obtain an approval or a permit that allows testing. For instance, testing in the Northern Territory requires consultation with the Department of Infrastructure, Planning, and Logistics Registrar of Motor Vehicles. In contrast, testing in Queensland requires consultation with the Department of Transport and Main Roads of Queensland. Similarly, in Canada, the testing guidelines for the organisation is a joint effort by Transport Canada and the Canadian Council of Motor Transport Administrators (CCMTA), pointing to the jurisdictional overlap. The guidelines for each nation should clearly identify the required authority to be consulted. Centralizing the contact point for the testing organisation would facilitate testing management and AV deployment. Forming a single regulatory board to represent the local authorities would be beneficial and would ultimately ease the AV testing and deployment. Listing the links to related standards, laws, regulations, and policies in the guideline also ensures the testing organisation would refer to the correct documents. Collectively, all AVs must comply with the existing vehicular laws, and the vehicles must be registered with the relevant authorities. Additionally, authorities should be notified that the vehicle is an AV testing unit which allows emergency responders and authorities to prepare for AV specific scenarios.
4.4. Test Driver/Operator
Ensuring public safety is essential for all parties involved; thus, the requirement of driver/operator presence must be addressed. The driver would act as the last fallback in case the autonomous mechanism fails. Some countries require a driver/operator to be always present in the AV, whereas Australia is more lenient and has no o such requirement. However, all countries encourage the driver/operator to be present during the testing. Existing requirements of driver/operator are in line with the customary traffic laws, such as having a valid driver’s license. Liability issues would sometimes be the driver’s responsibility, provided that the driver/operator is not attentive even though the system has indicated a possible autonomous failure.
Hence, it is a common requirement that the driver/operator should be trained in the AV’s technologies and system not only to conduct the test but also to manage failures and incidents. It is important for the training to include a standard protocol for the driver/operator to react and respond accordingly in possible emergency events such as fire, major accident and injury. This is to ensure that the driver/operator at hand would be able to minimize the damages. The guideline should specify the general technical competencies that the testing organisation can adapt into their driver’s training. Apart from the technical competencies, the driver/operator should also be trained to have skills related to safety and ethics. With sufficient training, the driver/operator would be able to manage damages, incidents, and situations effectively and diligently during the testing.
4.5. Insurance
All countries require some form of insurance. However, their coverage differs slightly depending on the depth of guidelines. For instance, Australia’s guidelines specifically mention the types of insurance policies that testing organisations should consider taking, such as compulsory third-party insurance, comprehensive vehicle insurance, public liability insurance, product liability insurance, self-insurance, and work or occupational health and safety insurance. However, in the United Kingdom, the insurance guidelines state only that the “relevant” insurance is required, which could be considered a general term. The insurance guidelines should address the liabilities involved and the minimum coverage amount that should be sufficient to cover the vehicle, product, public, occupational health and safety, and any other related risks. Furthermore, according to the guideline recommendations, obtaining relevant insurance is a priority that must be addressed before any testing begins.
4.6. Vehicle Safety Requirements
Assessment and mitigations are among the essential guideline requirements as preventive acts to reduce safety risk while simultaneously preparing to manage possible incidents. As many approaches are available, Failure Mode Effect Analysis (FMEA) would be a standard engineering practice to adopt. Nevertheless, a guideline should address the need for the testing organisation to conduct and present the assessment and mitigations to the related authorities. A guideline should require AVs to be tested in a closed circuit/area until the system is deemed satisfactory. The authorities and emergency service providers would then be able to provide recommendations and advice to further reduce the risk in any possible ways.
A system in the form of an audible warning on top of visual aid to inform testing operators of an autonomous malfunction should be compulsory. When testing operators are notified of a failure, operators could engage a physical switch that enables the driver/operator to instantly transit into manual driving mode. Therefore, a guideline should address for the AV to be equipped with an automated–manual mode transition switch to act as a reliable fallback mechanism to avoid incidents. Where the countries allow complete AV testing with a remote operator, the vehicles should be equipped with a real-time monitoring system capable of remotely taking control of the vehicle at any given moment.
As some of the AVs use existing production vehicles, integrating the AV system requires modifications. The available guidelines do not address the expected quality of the modifications. A guideline should note that any modifications performed on an existing production vehicle must refer to available standards or be carefully conducted not to cause system conflicts or secondary impairment of the vehicle performances that may affect the vehicle critical safety features such as airbag deployment.
By considering the possible incidents that may occur, a guideline should also recommend installing safety equipment: fire suppression equipment, emergency stop switch, and vehicle identifiers on the AV to further increase safety. The fire suppression equipment would be helpful for any fire events in the vehicle, while the emergency stop switch would be useful as the last response for the driver/operator to switch off the whole AV in an emergency. The vehicle identifiers in the form of signage or beacon light on the AV alert other road users to be cautious, thus increasing the safety of the other road users.
Specifying common critical vehicle safety requirements through the guideline could achieve uniformity of vehicle safety. A method to consider for countries is to form a body to conduct an AV safety inspection as part of the requirements before a trial is approved.
Reporting, Data Collection and Communication. None of the reviewed guidelines highlighted the need to assess devices used in AV. Imperfections of data produced by devices are unavoidable [
29] due to interference, interactions, material properties, testing process and environment during the actual testing operation. Such imperfections and uncertainties may lead to data inaccuracy and lead to AV system failure, damage, and crash. As the level of devices in AV becomes more complex and advance over time to produce an ideal AV, the reliability of the devices becomes more critical. The testing organisation should mitigate the imperfections and verify the data to further increase the reliance on AV public road testing. Studies such as [
29] can be used as an example of how the imperfections of the device can be addressed and reported.
All of the reviewed guidelines state the recommended information to be recorded. The Event Data Recorder (EDR) in vehicles must record pre, during, and post incidents in order to facilitate an investigation. Data types such as speed, time, weather condition, operating mode, forced manual takeover, and sensor data are mentioned as valuable data to be acquired. In addition, data should be accessed easily, and all information should be private and used only for investigatory and policymaking purposes.
The frequency of reporting between the guidelines varies insignificantly. All countries emphasize reporting, but guidelines by Australia and Canada highlight the frequency of the reports. A preliminary report must be submitted within 24 h in cases of serious accidents, and an end-of-the-test report is mentioned for both countries. A full report within seven days, including reports of traffic violations, is mentioned for Australia, while the United Kingdom does not propose such time restraint.
Therefore, to amalgamate a concise, clear guideline, the frequency of reports should be noted so that the testing organisation has a reliable baseline reference. All relevant information should be recorded as best practice that is already being implemented throughout all the guidelines.
5. Conclusions
Despite countries having different approaches and criteria for implementing AV testing, most guidelines concentrate heavily on AV test preparation. This is because preparing the vehicles, test areas, and permits, informing the authorities and public, preparing technology and infrastructure are keys to preventing accidents. Thus there is a lack of guidelines on testing procedures that would look into how the AV respond when acting on measures implemented in the preparation section. Post-test considerations focus on reporting and AV data analysis, which is considered satisfactory in most cases. Some guidelines’ complexity is more general than others, and discrepancies often result from countries having two to three guidelines from different jurisdictions addressing the same single issue. This may cause problems for the testing organisation, which must comply with the requirements of multiple authorities. Some guidelines put less emphasis on the post-testing procedures and do not focus on the frequency of assessments and reports provided to the authorities. This may be a concern since test reports are crucial in evaluating the performance safety of AVs. Theoretically, the synthesis of the guidelines from multiple countries allows for a concise and comprehensive global framework of regulatory measures concerning public AV testing, covering test preparation, testing, and post-testing stage. Rather than relying on a single national standard as a reference, an amalgam of guidelines from different countries allows a more holistic and measured view of AV testing practices. Thus, drafting a framework highlighting the seven synthesized elements discussed here will be a viable reference for national planning and sustaining the AV testing on public roads.


 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}