
Sequence Calculation and Automatic Discrimination of Vehicle Merging Conflicts in Freeway Merging Areas



Abstract
:1. Introduction
2. Related Work
2.1. Analysis of Traffic Conflicts in Freeway Merging Areas
2.2. Discrimination of Traffic Conflicts
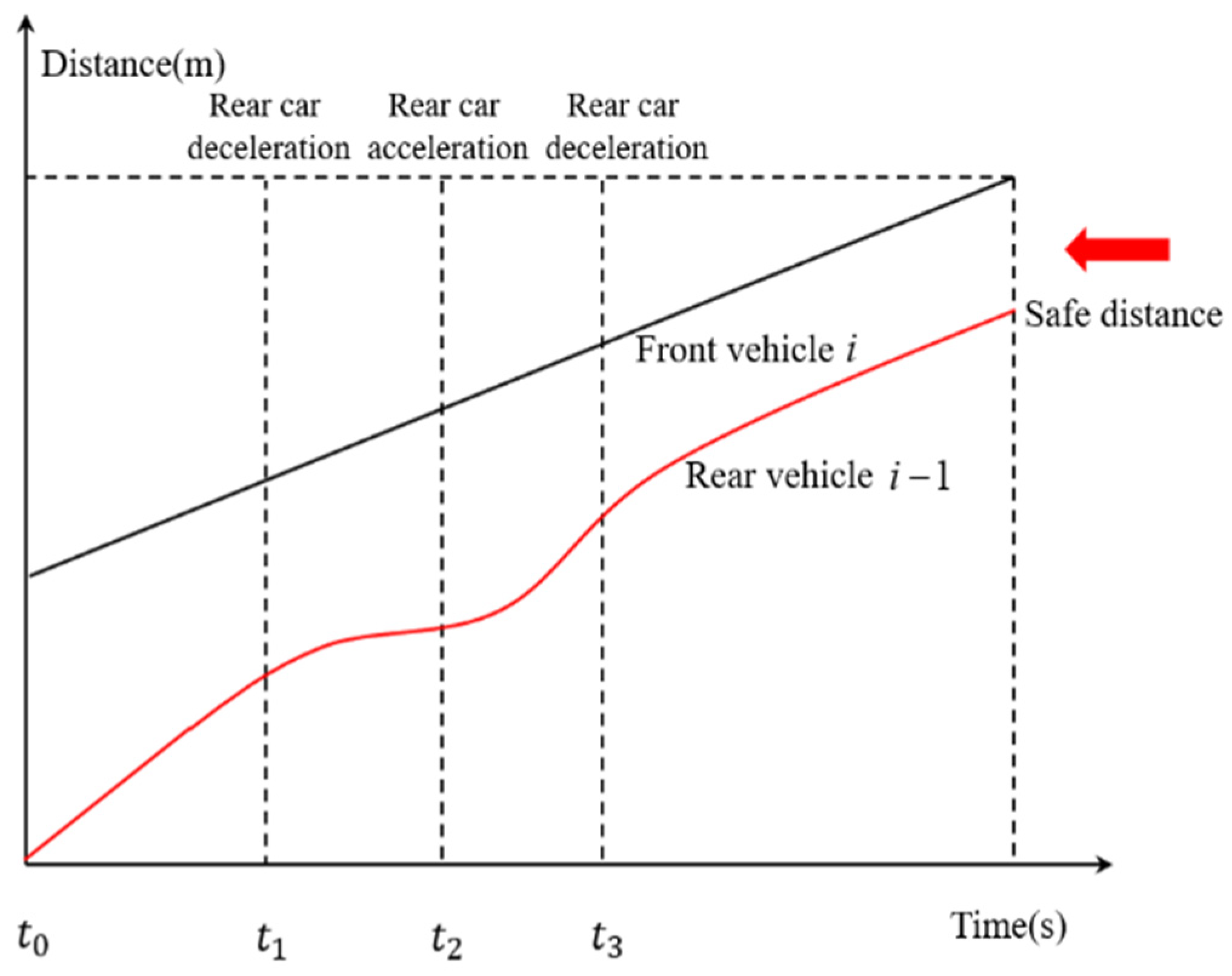
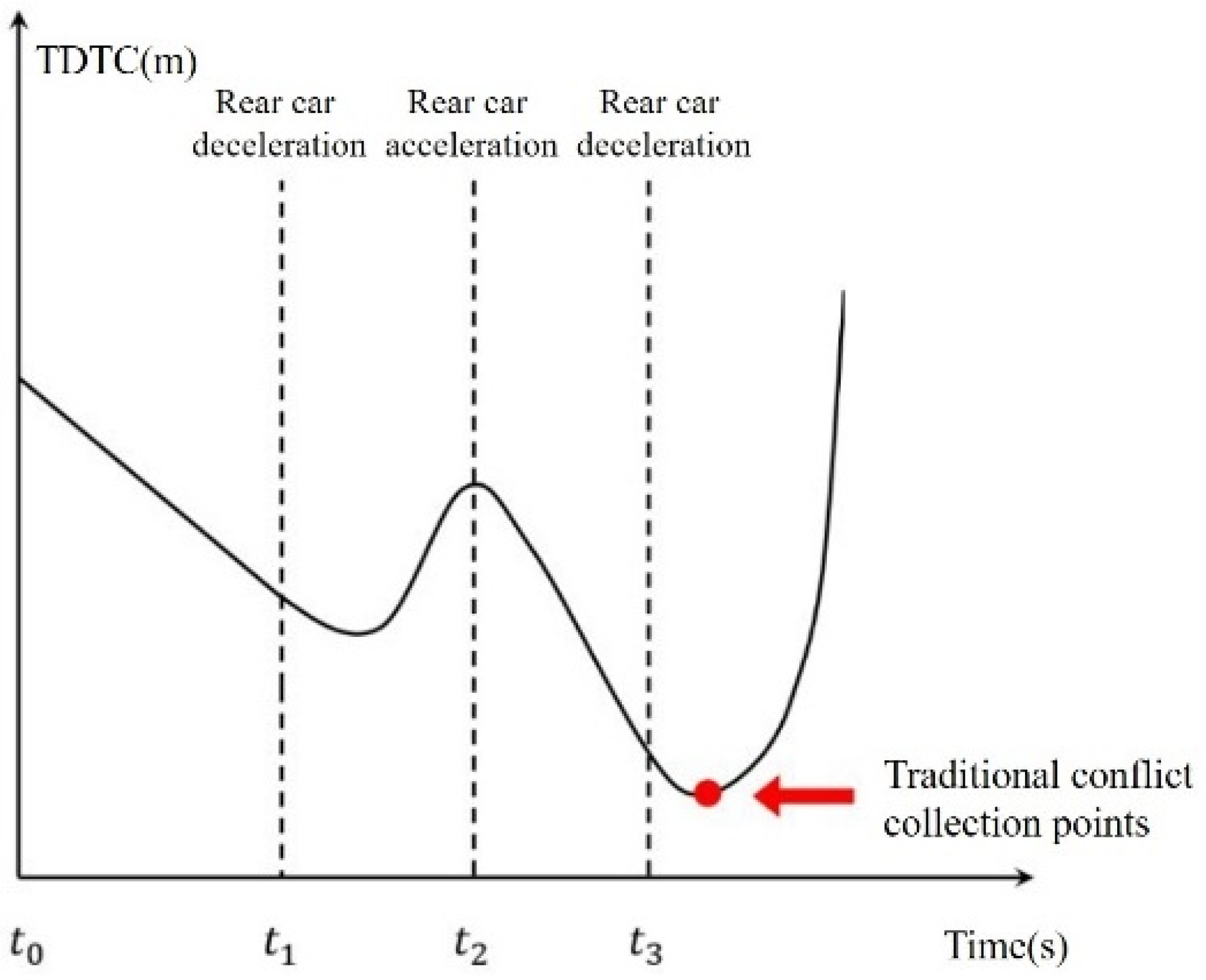
3. Conflict Mechanism of the Freeway Merging Area
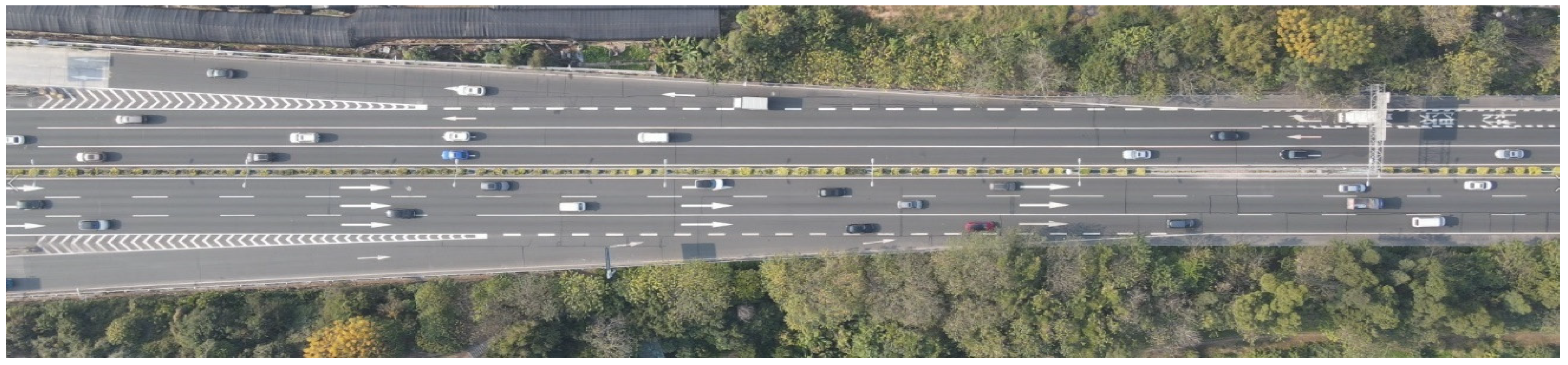
4. Data Acquisition
4.1. Selection of Indicators
- Time to Collision (TTC) is defined as the time difference between two vehicles keeping their current path and speed constant from the start of the conflict to the collision [30]. TTC is applicable to the calculation of rear-end conflicts, but not to lateral conflicts.
- Extended TTC complements the TTC with the calculation of lateral conflicts. However, the extended TTC is not accurate for the discrimination of lateral conflicts. For freeways, where the mainline vehicles are farther away, the ramp vehicles are faster and the TTC for lateral conflicts is smaller. The actual conflict in this case is not serious, indicating that the extended TTC cannot discriminate the lateral conflict effectively.
- Post Encroachment Time (PET) is defined as the time difference between the front and rear vehicles passing the conflict point or conflict surface [31]. PET is an indicator that describes a process, which is only applied to cases where trajectories intersect and does not reflect the dynamics of the conflict.
4.2. Data Collection
5. Sequence Calculation of Merging Conflicts
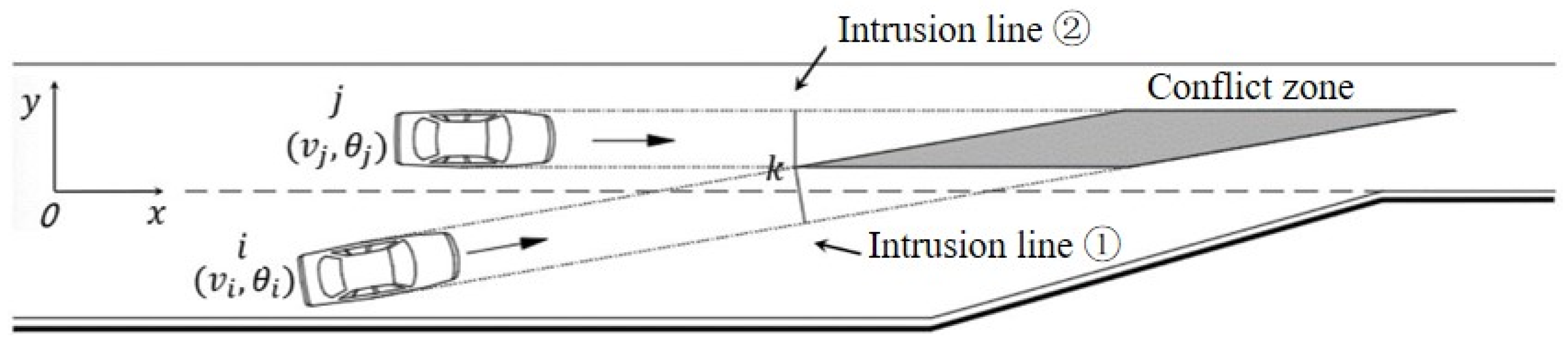
5.1. Construction of the Sequence Model of Merging Conflicts
5.2. Validity of the Sequence Model of Merging Conflicts
6. LightGBM-Based Automatic Discrimination of Merging Conflict
6.1. Principle of LightGBM
6.2. Feature Variables of Merging Conflicts
- (1)
- refer to Figure 5, fewer conflicts exist in the ramp lane, while more serious conflicts are present upstream of the acceleration lane;
- (2)
- more conflicts exist downstream of the acceleration lane and the gradient section. However, they are mostly general and minor conflicts; and
- (3)
- more conflicts are present at the end of the merging area; these conflicts are the most serious.
6.3. Model Training and Result Analysis
6.4. Model Validation
- (1)
- three distinctive characteristics of vehicles with severe conflicts can be observed: faster speed, unstable speed, and mainly distributed upstream of the acceleration lane and the end of the merging area;
- (2)
- two distinctive characteristics of vehicles with general and minor conflicts can be observed: more stable speed and smaller speed difference with the mainline vehicles.
7. Conclusions
- (1)
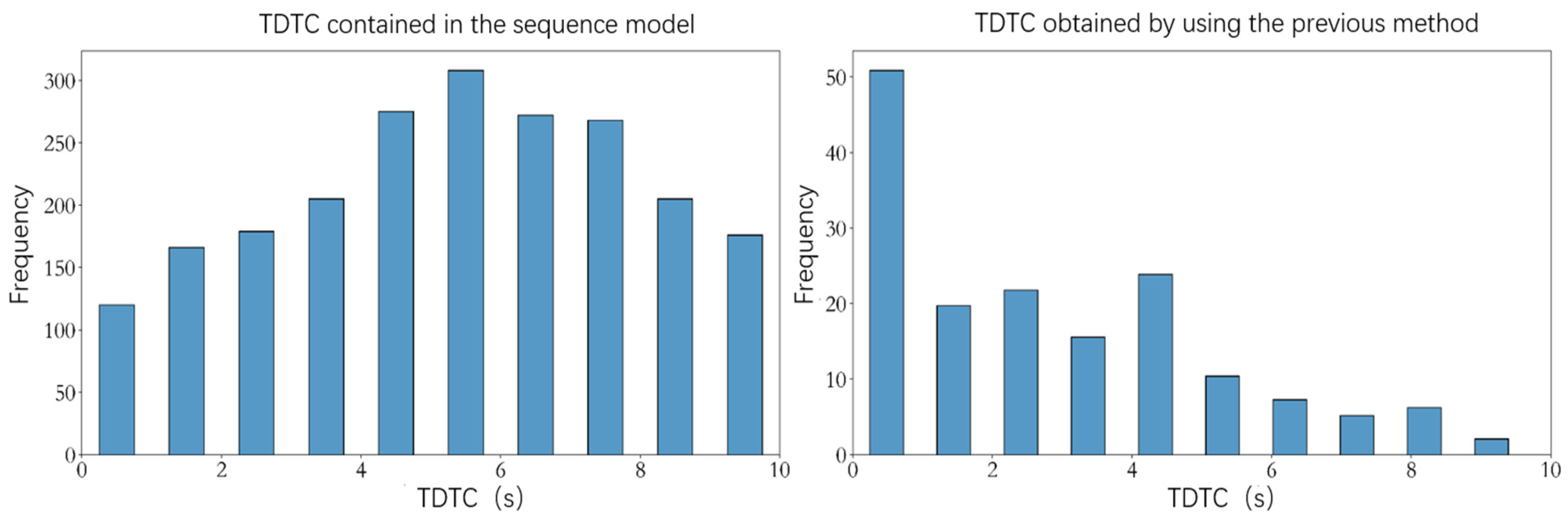
- We analyzed the mechanism behind freeway merging conflicts. On the basis of considering the dynamic nature of traffic conflicts, a sequence model of merging conflicts in freeway merging areas was constructed to reflect the dynamic nature of traffic conflicts by using Time Difference to Collision (TDTC) as the indicator of freeway merging conflicts.
- (2)
- The vehicle trajectory data of the merging area of Guanghe Freeway in Guangzhou City were collected by using a UAV. Based on the conflict sequence model, an exploratory analysis of the conflict data was conducted to filter out the relevant features. An automatic discrimination model of merging conflicts was constructed with the LightGBM algorithm at its core. After training, the model achieved an overall accuracy rate of 91% for merging conflict discrimination. In addition, the proposed model outperformed the random forest, AdaBoost, XGBoost, decision tree, and K-nearest neighbor models in check-all and check-accuracy rates. Lastly, the automatic discriminative model was proven to be highly interpretable and effective.
- (3)
- The results show that the most important feature of severe conflicts is the choice of the merging position. In addition, the most important feature of general conflicts is the standard deviation of speed before merging. Lastly, the most important feature of minor conflicts is the longitudinal speed difference between the ramp and mainline vehicles.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Za, W. Study on Traffic Conflicts Prediction and Safety Evaluation in Highway Convergence Zone. Master’s Thesis, Chongqing Jiaotong University, Chongqing, China, 2020. [Google Scholar]
- Wali, B.; Khattak, A.J.; Karnowski, T. Exploring microscopic driving volatility in naturalistic driving environment prior to involvement in safety critical events—Concept of event-based driving volatility. Accid. Anal. Prev. 2019, 132, 105277. [Google Scholar] [CrossRef] [PubMed]
- Essa, M.; Sayed, T. Traffic conflict models to evaluate the safety of signalized intersections at the cycle level. Transp. Res. Part C Emerg. Technol. 2018, 89, 289–302. [Google Scholar] [CrossRef]
- Tarko, A.P. A unifying view on traffic conflicts and their connection with crashes. Accid. Anal. Prev. 2021, 158, 106187. [Google Scholar] [CrossRef]
- Weng, J.; Xue, S.; Yang, Y.; Yan, X.; Qu, X. In-depth analysis of drivers’ merging behavior and rear-end crash risks in work zone merging areas. Accid. Anal. Prev. 2015, 77, 51–61. [Google Scholar] [CrossRef] [PubMed]
- Weng, J.; Li, G.; Yu, Y. Time-dependent drivers’ merging behavior model in work zone merging areas. Transp. Res. Part C Emerg. Technol. 2017, 80, 409–422. [Google Scholar] [CrossRef]
- Uzondu, C.; Jamson, S.; Lai, F. Exploratory study involving observation of traffic behavior and conflicts in Nigeria using the Traffic Conflict Technique. Saf. Sci. 2018, 110, 273–284. [Google Scholar] [CrossRef]
- Zheng, L.; Sayed, T.; Essa, M. Bayesian hierarchical modeling of the non-stationary traffic conflict extremes for crash estimation. Anal. Methods Accid. Res. 2019, 23, 100100. [Google Scholar] [CrossRef]
- Fu, C.; Sayed, T.; Zheng, L. Multivariate Bayesian hierarchical modeling of the non-stationary traffic conflict extremes for crash estimation. Anal. Methods Accid. Res. 2020, 28, 100135. [Google Scholar] [CrossRef]
- Zheng, L.; Sayed, T. A bivariate Bayesian hierarchical extreme value model for traffic conflict-based crash estimation. Anal. Methods Accid. Res. 2020, 25, 100111. [Google Scholar] [CrossRef]
- Zheng, L.; Sayed, T. Comparison of traffic conflict indicators for crash estimation using peak over threshold approach. Transp. Res. Rec. 2019, 2673, 493–502. [Google Scholar] [CrossRef]
- Zheng, L.; Sayed, T.; Mannering, F. Modeling traffic conflicts for use in road safety analysis: A review of analytic methods and future directions. Anal. Methods Accid. Res. 2021, 29, 100142. [Google Scholar] [CrossRef]
- Fu, C.; Sayed, T. A multivariate method for evaluating safety from conflict extremes in real time. Anal. Methods Accid. Res. 2022, 36, 100244. [Google Scholar] [CrossRef]
- Fu, C.; Sayed, T. Random parameters Bayesian hierarchical extreme value modeling approach with heterogeneity in means and variances for traffic conflict-based crash estimation. J. Transp. Eng. Part A Syst. 2022, 149, 04022056. [Google Scholar] [CrossRef]
- Shen, L. Freeway Interchange Traffic Safety Analysis Method Based on Traffic Conflict Technique. Ph.D. Thesis, Southeast University, Nanjing, China, 2017. [Google Scholar]
- Wen, H.Y.; Wu, J.B.; Qi, W.W. CP-CS Fusion Model for On-Ramp Merging Area on the Highway. J. South China Univ. Technol. 2020, 48, 50–57. [Google Scholar]
- Arun, A.; Haque, M.M.; Washington, S.; Sayed, T.; Mannering, F. How many are enough?: Investigating the effectiveness of multiple conflict indicators for crash frequency-by-severity estimation by automated traffic conflict analysis. Transp. Res. Part C Emerg. Technol. 2022, 138, 103653. [Google Scholar] [CrossRef]
- Katrakazas, C.; Theofilatos, A.; Islam, M.A.; Papadimitriou, E.; Dimitriou, L.; Antoniou, C. Prediction of rear-end conflict frequency using multiple-location traffic parameters. Accid. Anal. Prev. 2021, 152, 106007. [Google Scholar] [CrossRef]
- Wang, J.; Wen, C.; Zhang, X.; Xu, T.; Zhang, Y. Difference of Vehicle Following Behavior in Different Lanes of Freeway Merging Area. Transp. Res. 2020, 6, 59–65. [Google Scholar] [CrossRef]
- Xinpeng, D. Study on Selection of Super-Multi-Lane Expressway Traffic Organization Mode Based on Traffic Efficiency in Merging Area. Master’s Thesis, Chang’an University, Xi’an, China, 2021. [Google Scholar]
- Zhang, X.; Wang, K.; Tao, H. Research on Speed Limit Method of Expressway Main Road Based on Rainy Environment and Its Influence on Vehicle Confluence. In Proceedings of the 19th COTA International Conference of Transportation, Nanjing, China, 6–8 July 2019; pp. 3512–3523. [Google Scholar]
- Lu, Y.; Cheng, K.; Zhang, Y.; Chen, X.; Zou, Y. Analysis of lane-change conflict between cars and trucks at merging section using UAV video data. arXiv 2022, arXiv:2201.07881. [Google Scholar]
- Park, H.; Bhamidipati, C.; Smith, B. Development and Evaluation of Enhanced IntelliDrive-Enabled Lane Changing Advisory Algorithm to Address Freeway Merge Conflict. Transp. Res. Rec. J. Transp. Res. Board 2011, 2243, 146–157. [Google Scholar] [CrossRef]
- Wu, J.; Chen, X.; Bie, Y.; Zhou, W. A co-evolutionary lane-changing trajectory planning method for automated vehicles based on the instantaneous risk identification. Accid. Anal. Prev. 2023, 180, 106907. [Google Scholar] [CrossRef]
- Xie, K.; Ozbay, K.; Yang, H.; Li, C. Mining automatically extracted vehicle trajectory data for proactive safety analytics. Transp. Res. Part C Emerg. Technol. 2019, 106, 61–72. [Google Scholar] [CrossRef]
- Lu, J.; Grembek, O.; Hansen, M. Learning the representation of surrogate safety measures to identify traffic conflict. Accid. Anal. Prev. 2022, 174, 106755. [Google Scholar] [CrossRef]
- Ma, Y.; Zhu, J. Left-turn conflict identification at signal intersections based on vehicle trajectory reconstruction under real-time communication conditions. Accid. Anal. Prev. 2021, 150, 105933. [Google Scholar] [CrossRef]
- Mayerhofer, A.; Haas, I.; Gabriel, F.; Friedrich, B. Identifying Conflict Points for the Examination of Automated Vehicles in the Presence of Vulnerable Road Users. Transp. Res. Procedia 2020, 47, 609–616. [Google Scholar] [CrossRef]
- Xin, G. Study on Traffic Conflicts Prediction Model of Freeway Interchange Merging Areas. Ph.D. Thesis, Southeast University, Nanjing, China, 2020. [Google Scholar]
- Riedmaier, S.; Ponn, T.; Ludwig, D.; Schick, B.; Diermeyer, F. Survey on scenario-based safety assessment of automated vehicles. IEEE Access 2020, 8, 87456–87477. [Google Scholar] [CrossRef]
- Allen, B.L.; Shin, B.T.; Cooper, P. Analysis of traffic conflicts and collisions. Transp. Res. Rec. 1978, 667, 67–74. [Google Scholar]
- Zhang, Y.; Liu, S.; Qiu, Z.; Yao, D.; Peng, L. Pedestrian-vehicle conflict parameter analysis and safety evaluation. J. Harbin Inst. Technol. 2012, 44, 123–128. [Google Scholar]
- Kuznetsova, A.; Maleva, T.; Soloviev, V. Detecting apples in orchards using YOLOv3 and YOLOv5 in general and close-up images. In Proceedings of the International Symposium on Neural Networks, Cairo, Egypt, 4–6 December 2020; pp. 233–243. [Google Scholar]
- Wojke, N.; Bewley, A.; Paulus, D. Simple online and realtime tracking with a deep association metric. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017; pp. 3645–3649. [Google Scholar]
- Wang, T. Research on EMD Algorithm and Its Application in Signal Denoising. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2010. [Google Scholar]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Zhao, X.; Wang, P.; Zhu, S.; Jiang, R.; Zou, H. Spatial Distribution of Traffic Conflicts in Interchange Merging Area Based on Video Recognition. J. Highw. Transp. Res. Dev. 2021, 38, 90–99. [Google Scholar]
- Meng, Q. LightGBM: A Highly Efficient Gradient Boosting Decision Tree. In Proceedings of the 31st Conference on Neural Information Processing Systems (NIPS 2017), Long Beach, CA, USA, 4–9 December 2018; pp. 3147–3155. [Google Scholar]
- Friedman, J.H. Greedy function approximation: A gradient boosting machine. Ann. Stat. 2000, 29, 1189–1232. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NO. | Field Name | Meaning |
|---|---|---|
| 1 | ID-1 | The ID of the ramp Vehicle 1 |
| 2 | X-1 | The longitudinal position of ramp Vehicle 1 |
| 3 | Y-1 | The lateral position of ramp Vehicle 1 |
| 4 | VX-1 | Longitudinal speed of ramp Vehicle 1 |
| 5 | VY-1 | Lateral speed of ramp Vehicle 1 |
| 6 | AX-1 | Longitudinal acceleration of ramp Vehicle 1 |
| 7 | AY-1 | The lateral acceleration of ramp Vehicle 1 |
| 8 | ID-2 | The ID of the mainline Vehicle 2 |
| 9 | X-2 | The longitudinal position of mainline Vehicle 2 |
| 10 | Y-2 | The lateral position of mainline Vehicle 2 |
| 11 | VX-2 | Longitudinal speed of mainline Vehicle 2 |
| 12 | VY-2 | Lateral speed of mainline Vehicle 2 |
| 13 | AX-2 | Longitudinal acceleration of mainline Vehicle 2 |
| 14 | AY-2 | The lateral acceleration of mainline Vehicle 2 |
| 15 | ID-3 | The ID of the mainline Vehicle 3 |
| 16 | X-3 | The longitudinal position of mainline Vehicle 3 |
| 17 | Y-3 | The lateral position of mainline Vehicle 3 |
| 18 | VX-3 | Longitudinal speed of mainline Vehicle 3 |
| 19 | VY-3 | Lateral speed of mainline Vehicle 3 |
| 20 | AX-3 | Longitudinal acceleration of mainline Vehicle 3 |
| 21 | AY-3 | The lateral acceleration of mainline Vehicle 3 |
| 22 | TDTC | The merging conflict between Vehicle 1 and 2 |
| Category | Number |
|---|---|
| Merging trajectory | 294 |
| Number of TDTC obtained by using the previous method | 157 |
| Number of merging conflict sequences | 157 |
| Number of TDTC contained in the conflict sequences | 2174 |
| Category | Average Speed (m/s) |
|---|---|
| Vehicles causing serious conflicts | 16.5 |
| Other merging vehicles | 14.8 |
| Mainline Vehicle | Ramp Vehicle before Merging into the Mainline | Ramp Vehicle after Merging into the Mainline | |
|---|---|---|---|
| Average speed | 20.43 | 18.16 | 17.03 |
| Speed variance | 5.02 | 2.32 | 8.41 |
| Standard deviation | 2.20 | 1.45 | 2.69 |
| Variable Classification | Variable | Type | Range | Meaning |
|---|---|---|---|---|
| Dependent variable | Discrete variable | 0–3 | Severity of conflict | |
| Independent variable | Continuous variable | 0.2–22.3 (m/s) | The lateral speed difference between the ramp vehicle and the ahead mainline vehicle | |
| Continuous variable | 3.4–28.4 (m/s) | The longitudinal speed difference between the ramp vehicle and the ahead mainline vehicle | ||
| Continuous variable | 0.1–22.3 (m) | Lateral distance difference between the ramp vehicle and the ahead mainline vehicle | ||
| Continuous variable | 7.6–20.5 (m) | Longitudinal distance difference between the ramp vehicle and the ahead mainline vehicle | ||
| Continuous variable | 0–18.2 (m/s) | The lateral speed difference between the ramp vehicle and the back mainline vehicle | ||
| Continuous variable | 0–4.5 (m/s) | The longitudinal speed difference between the ramp vehicle and the back mainline vehicle | ||
| Continuous variable | 0.1–25 (m) | Lateral distance difference between the ramp vehicle and the back mainline vehicle | ||
| Continuous variable | 8.3–25 (m) | Longitudinal distance difference between the ramp vehicle and the back mainline vehicle | ||
| Continuous variable | 0–3.67 | Standard deviation before merging | ||
| Continuous variable | 0–5.35 | Standard deviation after merging | ||
| Discrete variable | 1–3 | Merging position of ramp vehicles | ||
| Continuous variable | −1.5–1.1 () | The lateral acceleration of the ramp vehicle | ||
| Continuous variable | −3.9–3.9 () | Longitudinal acceleration of the ramp vehicle | ||
| Continuous variable | −2.8–2.0 () | The lateral acceleration of the ahead mainline vehicle | ||
| Continuous variable | −4.0–4.5 () | Longitudinal acceleration of the ahead mainline vehicle | ||
| Continuous variable | −1.8–1.9 () | The lateral acceleration of the back mainline vehicle | ||
| Continuous variable | −4.0–3.9 () | Longitudinal acceleration of the back mainline vehicle | ||
| Continuous variable | −3.14–−3.07 | Merging Angle | ||
| Continuous variable | 11.4–251.9 (m) | Headway between the mainline vehicles |
| Parameter | Description | Value |
|---|---|---|
| boosting_type | Training method | GBDT |
| objective | Training objective | Multi-classification |
| metric | Evaluation indicators | Multi-classification log loss |
| n_estimators | Number of iterations | 5000 |
| learning_rate | Learning rate | 0.05 |
| max_depth | Maximum depth | 1000 |
| num_leaves | Number of leaves of a single tree | 50 |
| min_data_in_leaf | Minimum number of samples of leaf nodes | 4 |
| max_bin | Feature capacity | 25 |
| early_stopping_round | Number of iterations required to stop early | 500 |
| Category | Detection Rate | Completion Rate | F1-SCORE | |
|---|---|---|---|---|
| Severe conflict | 0.87 | 0.82 | 0.84 | |
| General conflict | 0.88 | 0.87 | 0.88 | |
| Minor conflict | 0.89 | 0.72 | 0.80 | |
| No conflict | 0.93 | 0.97 | 0.95 | |
| Correct rate | - | - | - | 0.91 |
| Macro average | - | 0.89 | 0.85 | 0.87 |
| Weighted average | - | 0.91 | 0.91 | 0.91 |
| Feature | Severe Conflict | General Conflict | Minor Conflict | No Conflict | Total | Order of Importance |
|---|---|---|---|---|---|---|
| 1.86 | 0.72 | 2.88 | 3.02 | 8.48 | 1 | |
| 0.59 | 0.90 | 3.33 | 2.95 | 7.77 | 2 | |
| 1.87 | 0.35 | 0.03 | 0.18 | 2.44 | 3 | |
| 1.04 | 0.28 | 0.40 | 0.71 | 2.43 | 4 | |
| 0.59 | 0.92 | 0.23 | 0.68 | 2.41 | 5 | |
| 0.40 | 0.73 | 0.50 | 0.66 | 2.29 | 6 | |
| 0.80 | 0.54 | 0.30 | 0.46 | 2.11 | 7 | |
| 0.55 | 0.32 | 0.23 | 0.24 | 1.34 | 8 | |
| 0.76 | 0.08 | 0.27 | 0.15 | 1.26 | 9 | |
| 0.34 | 0.22 | 0.18 | 0.33 | 1.07 | 10 | |
| 0.34 | 0.29 | 0.12 | 0.24 | 1.00 | 11 | |
| 0.43 | 0.16 | 0.11 | 0.25 | 0.95 | 12 | |
| 0.19 | 0.07 | 0.20 | 0.11 | 0.56 | 13 | |
| 0.18 | 0.06 | 0.14 | 0.08 | 0.45 | 14 | |
| 0.15 | 0.09 | 0.16 | 0.06 | 0.45 | 15 | |
| 0.13 | 0.11 | 0.16 | 0.03 | 0.42 | 16 | |
| 0.18 | 0.04 | 0.11 | 0.03 | 0.36 | 17 | |
| 0.07 | 0.06 | 0.10 | 0.10 | 0.33 | 18 | |
| 0.07 | 0.04 | 0.12 | 0.04 | 0.29 | 19 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, J.; Wang, H.; Wang, W.; Qi, W. Sequence Calculation and Automatic Discrimination of Vehicle Merging Conflicts in Freeway Merging Areas. Sustainability 2022, 14, 16834. https://doi.org/10.3390/su142416834
Hu J, Wang H, Wang W, Qi W. Sequence Calculation and Automatic Discrimination of Vehicle Merging Conflicts in Freeway Merging Areas. Sustainability. 2022; 14(24):16834. https://doi.org/10.3390/su142416834
Chicago/Turabian StyleHu, Jinsong, Huapeng Wang, Wei Wang, and Weiwei Qi. 2022. "Sequence Calculation and Automatic Discrimination of Vehicle Merging Conflicts in Freeway Merging Areas" Sustainability 14, no. 24: 16834. https://doi.org/10.3390/su142416834
APA StyleHu, J., Wang, H., Wang, W., & Qi, W. (2022). Sequence Calculation and Automatic Discrimination of Vehicle Merging Conflicts in Freeway Merging Areas. Sustainability, 14(24), 16834. https://doi.org/10.3390/su142416834