
Spatio-Temporal Network for Sea Fog Forecasting

 ,
,
Abstract
:1. Introduction
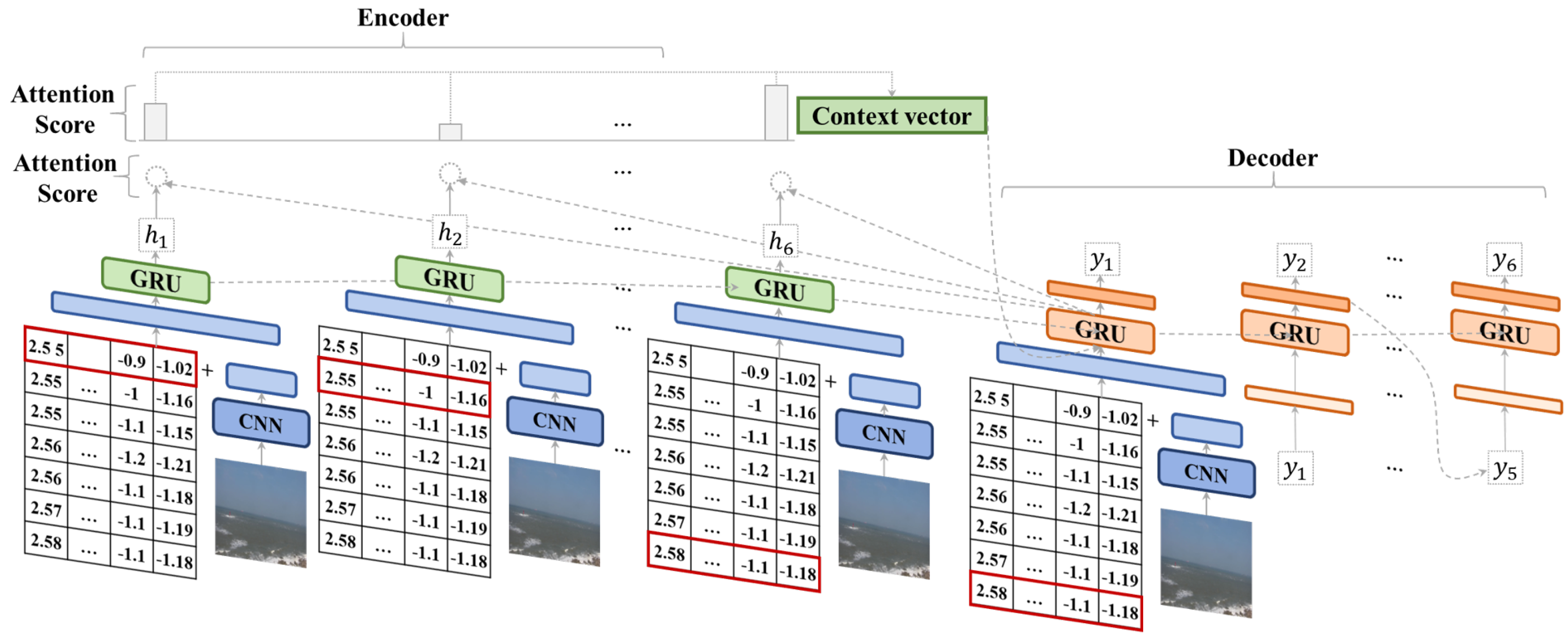
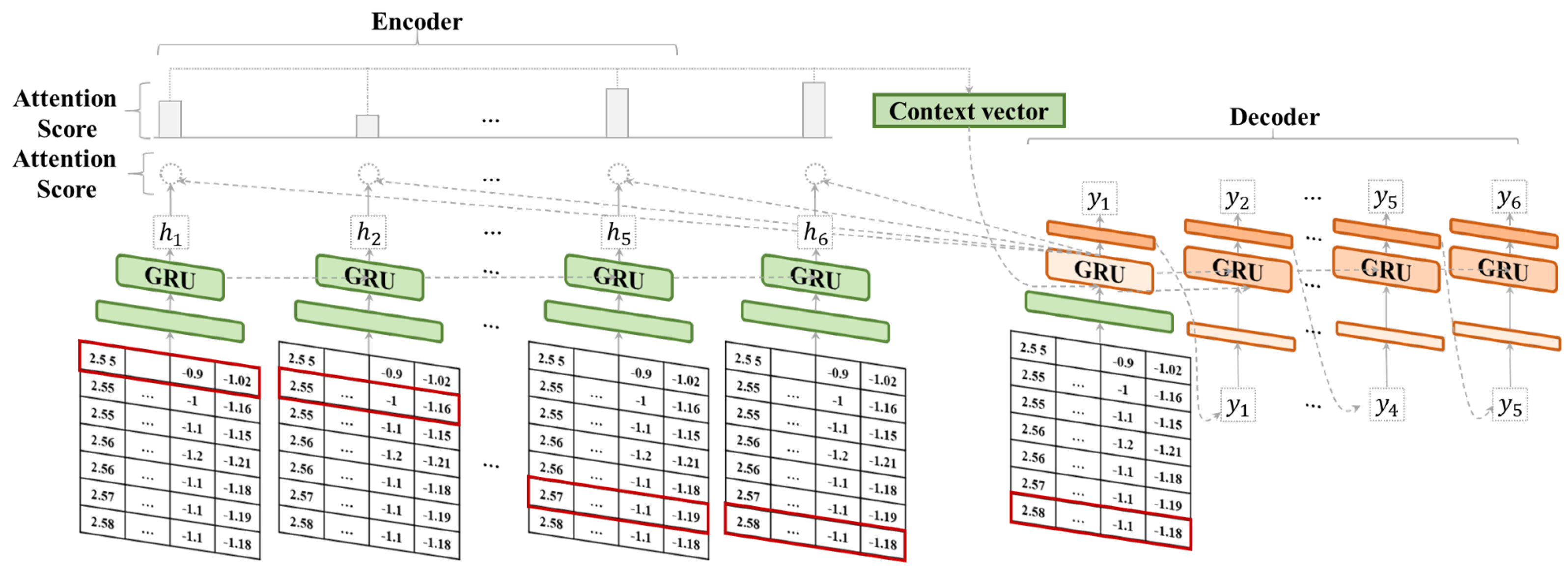
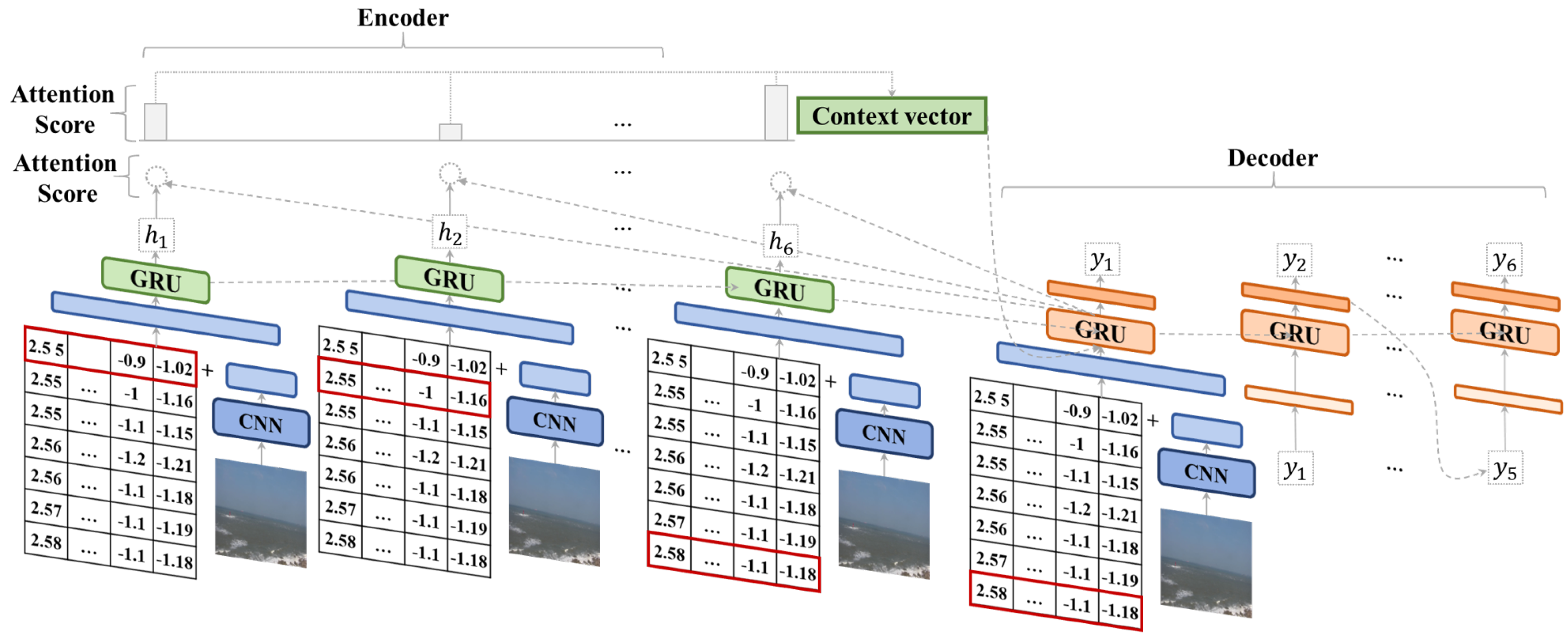
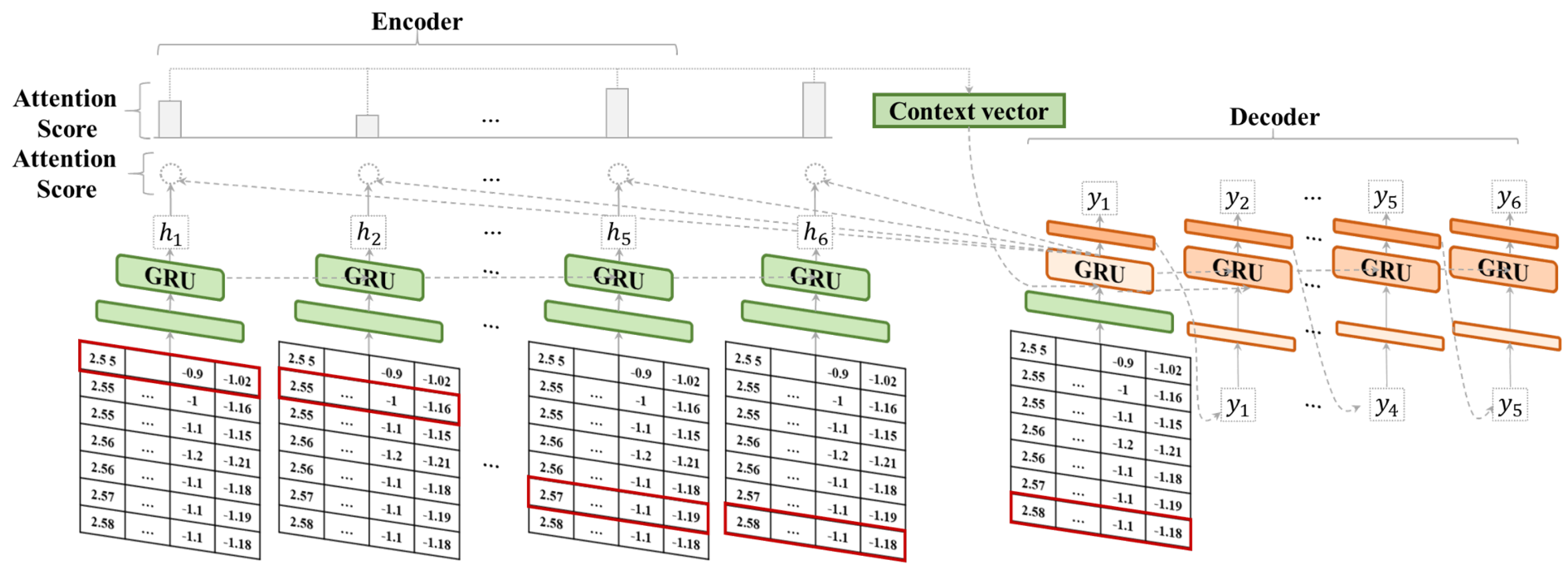
- A spatio-temporal network for sea fog forecasting is proposed. The method aims to take advantage of the complementary benefits by simultaneously using time series meteorological data and CCTV images. To the best of our knowledge, this has not been previously studied in the field of fog forecasting.
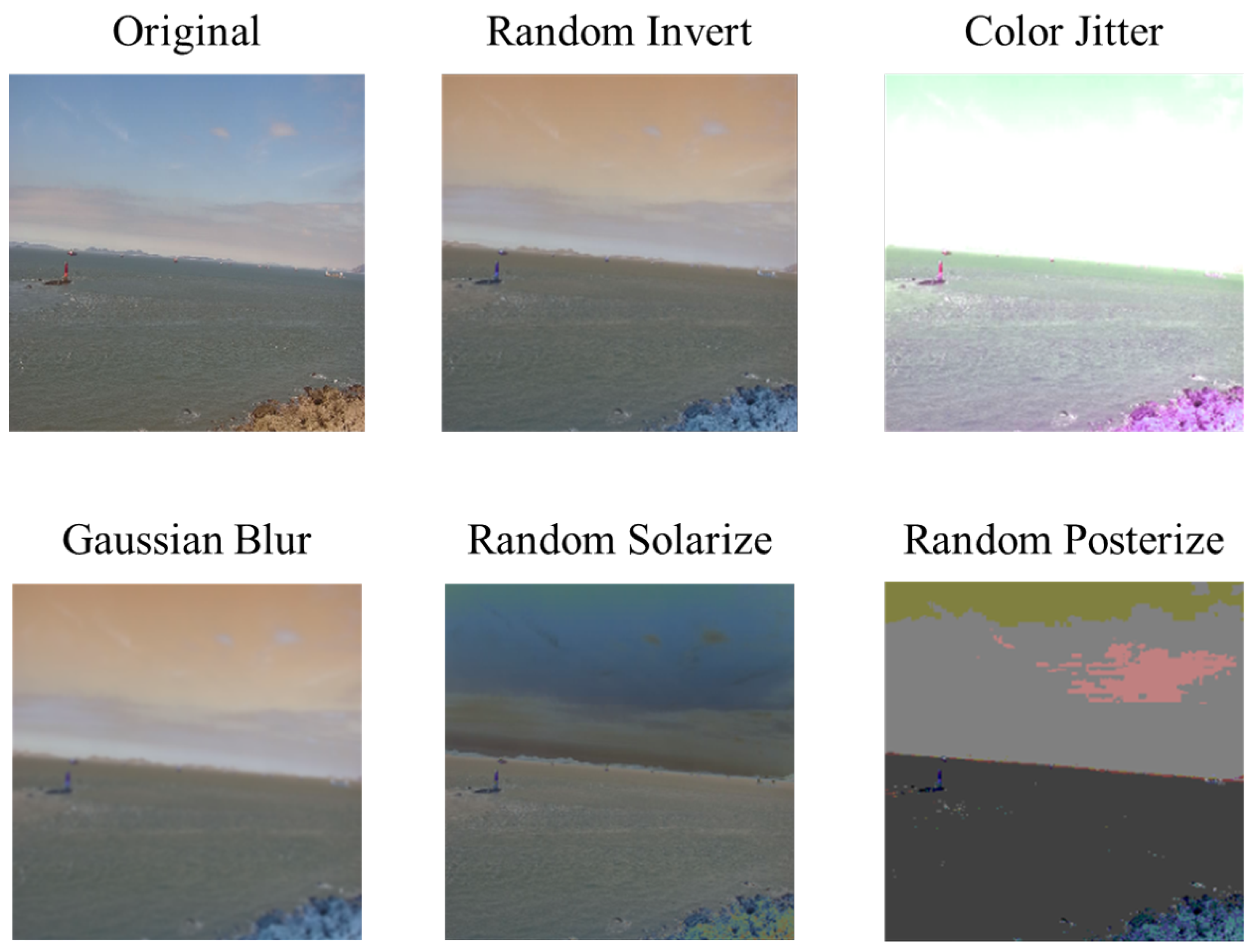
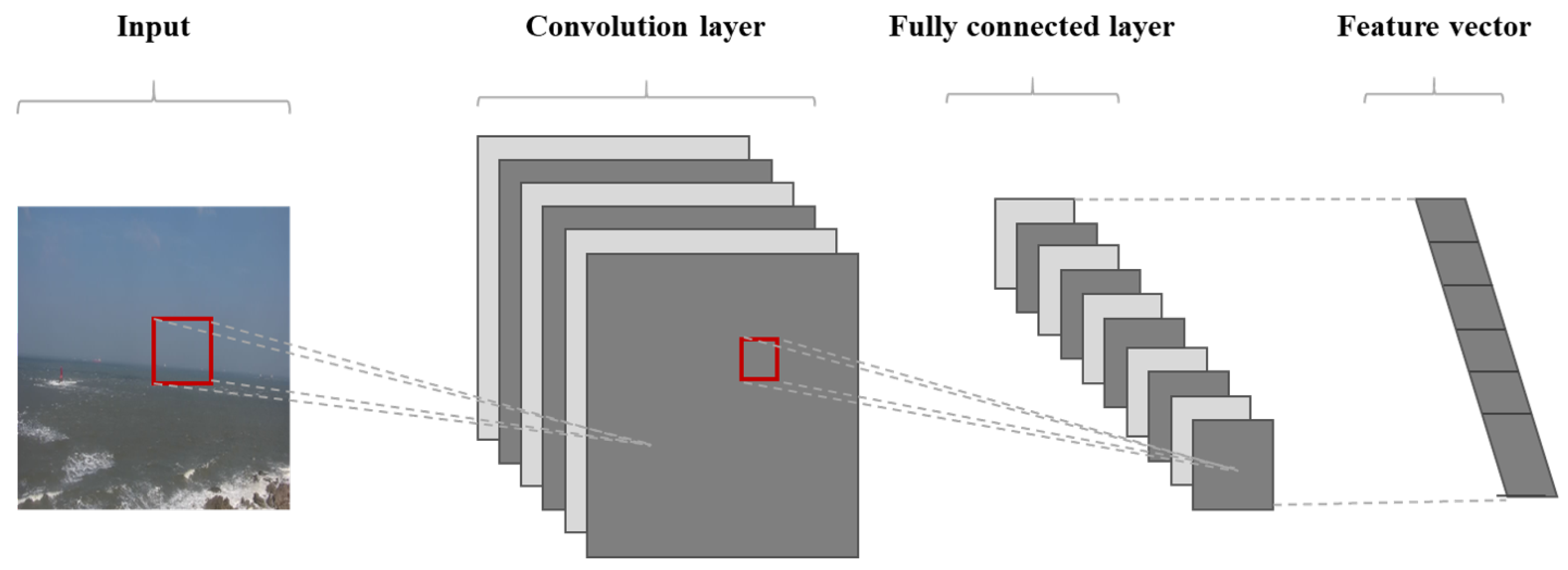
- Data augmentation techniques were applied to the image. CCTV images contain information such as sea fog, sea, sky, and clouds. Data augmentation techniques modify the texture of the image to reveal distinct differences to effectively extract spatial information about sea fog.
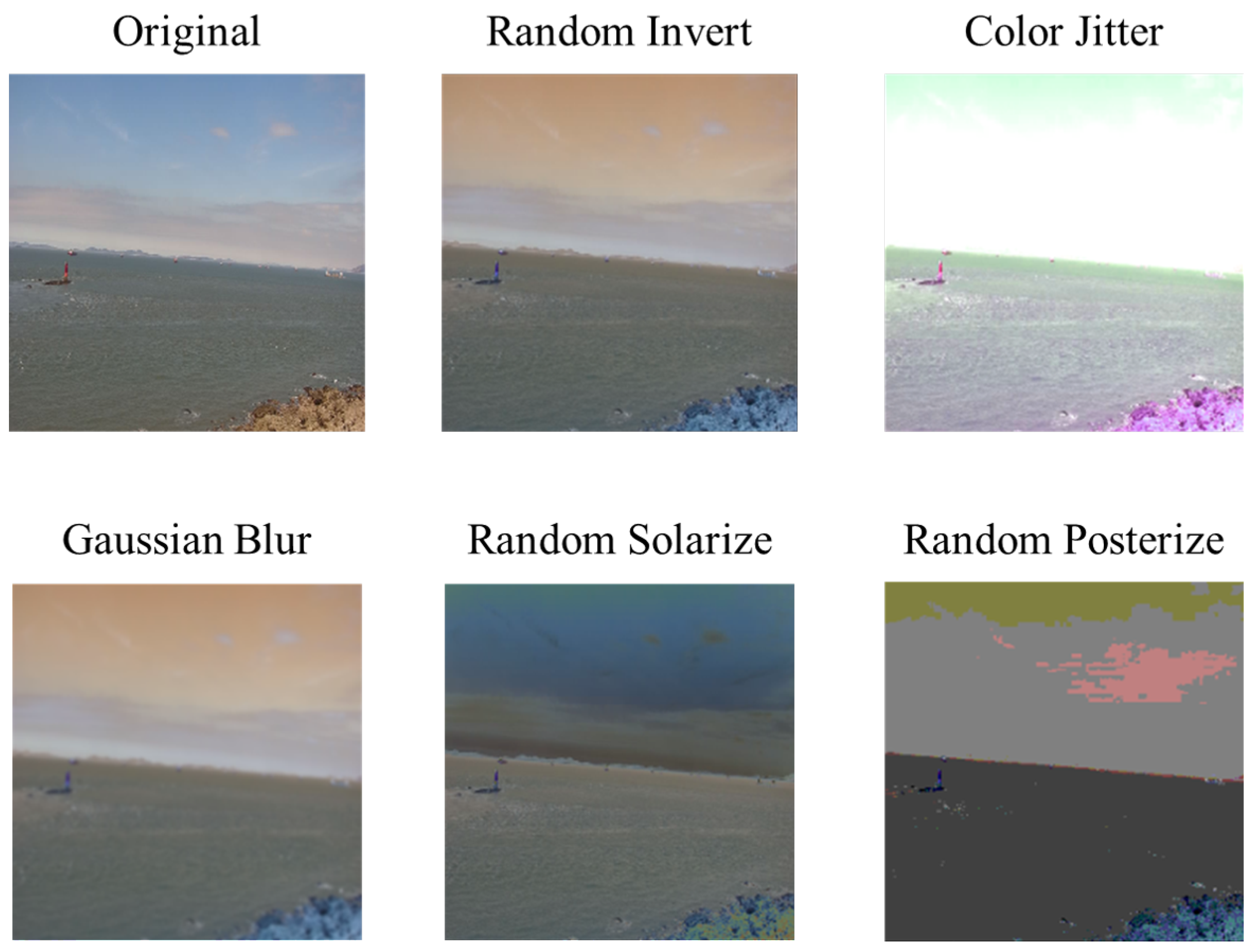
- Experiments on data augmentation techniques were conducted to improve the sea fog forecasting performance of the proposed method. An experiment was conducted by applying random invert, color jitter, Gaussian blur, random solarization, and random posterization, showing what augmentation techniques can effectively capture information about sea fog information.
2. Related Works
3. Proposed Method
3.1. Data Acquisition
3.2. Model Architecture and Data Augmentation Techniques
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Heo, K.Y.; Park, S.; Ha, K.J.; Shim, J.S. Algorithm for sea fog monitoring with the use of information technologies. Meteorol. Appl. 2014, 21, 350–359. [Google Scholar] [CrossRef]
- Wang, S.; Li, H.; Zhang, M.; Duan, L.; Zhu, X.; Che, Y. Assessing Gridded Precipitation and Air Temperature Products in the Ayakkum Lake, Central Asia. Sustainability 2022, 14, 10654. [Google Scholar] [CrossRef]
- Anthes, R.A.; Warner, T.T. Development of hydrodynamic models suitable for air pollution and other mesometerological studies. Mon. Weather Rev. 1978, 106, 1045–1078. [Google Scholar] [CrossRef]
- Han, K.K.; Kim, Y.C. Numerical forecasting of sea fog at West sea in spring. J. Korean Soc. Aviat. Aeronaut. 2006, 14, 94–100. [Google Scholar]
- Miao, K.c.; Han, T.t.; Yao, Y.q.; Lu, H.; Chen, P.; Wang, B.; Zhang, J. Application of LSTM for short term fog forecasting based on meteorological elements. Neurocomputing 2020, 408, 285–291. [Google Scholar] [CrossRef]
- Bahdanau, D.; Cho, K.; Bengio, Y. Neural machine translation by jointly learning to align and translate. arXiv 2014, arXiv:1409.0473. [Google Scholar]
- Chung, J.; Gulcehre, C.; Cho, K.; Bengio, Y. Empirical evaluation of gated recurrent neural networks on sequence modeling. arXiv 2014, arXiv:1412.3555. [Google Scholar]
- Dev, K.; Nebuloni, R.; Capsoni, C. Fog prediction based on meteorological variables—An empirical approach. In Proceedings of the 2016 International Conference on Broadband Communications for Next Generation Networks and Multimedia Applications (CoBCom), Graz, Austria, 14–16 September 2016; IEEE: Hoboken, NJ, USA, 2016; pp. 1–6. [Google Scholar]
- Guijo-Rubio, D.; Gutiérrez, P.; Casanova-Mateo, C.; Sanz-Justo, J.; Salcedo-Sanz, S.; Hervás-Martínez, C. Prediction of low-visibility events due to fog using ordinal classification. Atmos. Res. 2018, 214, 64–73. [Google Scholar] [CrossRef]
- Dewi, R.; Harsa, H.; Prawito. Fog prediction using artificial intelligence: A case study in Wamena Airport. In Proceedings of the Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2020; Volume 1528, p. 012021. [Google Scholar]
- Han, J.H.; Kim, K.J.; Joo, H.S.; Han, Y.H.; Kim, Y.T.; Kwon, S.J. Sea Fog Dissipation Prediction in Incheon Port and Haeundae Beach Using Machine Learning and Deep Learning. Sensors 2021, 21, 5232. [Google Scholar] [CrossRef]
- Castillo-Botón, C.; Casillas-Pérez, D.; Casanova-Mateo, C.; Ghimire, S.; Cerro-Prada, E.; Gutierrez, P.; Deo, R.; Salcedo-Sanz, S. Machine learning regression and classification methods for fog events prediction. Atmos. Res. 2022, 272, 106157. [Google Scholar] [CrossRef]
- Son, Y.; Yoon, Y.; Cho, J.; Choi, S. Cloud Cover Forecast Based on Correlation Analysis on Satellite Images for Short-Term Photovoltaic Power Forecasting. Sustainability 2022, 14, 4427. [Google Scholar] [CrossRef]
- Guerra, J.C.V.; Khanam, Z.; Ehsan, S.; Stolkin, R.; McDonald-Maier, K. Weather Classification: A new multi-class dataset, data augmentation approach and comprehensive evaluations of Convolutional Neural Networks. In Proceedings of the 2018 NASA/ESA Conference on Adaptive Hardware and Systems (AHS), Edinburgh, UK, 6–9 August 2018; IEEE: Hoboken, NJ, USA, 2018; pp. 305–310. [Google Scholar]
- Pulukool, F.; Li, L.; Liu, C. Using deep learning and machine learning methods to diagnose hailstorms in large-scale thermodynamic environments. Sustainability 2020, 12, 10499. [Google Scholar] [CrossRef]
- Zhao, B.; Hua, L.; Li, X.; Lu, X.; Wang, Z. Weather recognition via classification labels and weather-cue maps. Pattern Recognit. 2019, 95, 272–284. [Google Scholar] [CrossRef]
- Zhao, X.; Jiang, J.; Feng, K.; Wu, B.; Luan, J.; Ji, M. The Method of Classifying Fog Level of Outdoor Video Images Based on Convolutional Neural Networks. J. Indian Soc. Remote Sens. 2021, 49, 2261–2271. [Google Scholar] [CrossRef]
- Kamangir, H.; Collins, W.; Tissot, P.; King, S.A.; Dinh, H.T.H.; Durham, N.; Rizzo, J. FogNet: A multiscale 3D CNN with double-branch dense block and attention mechanism for fog prediction. Mach. Learn. Appl. 2021, 5, 100038. [Google Scholar] [CrossRef]
- Ngiam, J.; Khosla, A.; Kim, M.; Nam, J.; Lee, H.; Ng, A.Y. Multimodal deep learning. In Proceedings of the International Conference on Machine Learning (ICML), Bellevue, WA, USA, 28 June–2 July 2011. [Google Scholar]
- Wang, H.; Shen, K.; Yu, P.; Shi, Q.; Ko, H. Multimodal deep fusion network for visibility assessment with a small training dataset. IEEE Access 2020, 8, 217057–217067. [Google Scholar] [CrossRef]
- Bijelic, M.; Gruber, T.; Mannan, F.; Kraus, F.; Ritter, W.; Dietmayer, K.; Heide, F. Seeing through fog without seeing fog: Deep multimodal sensor fusion in unseen adverse weather. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 11682–11692. [Google Scholar]
- Qian, K.; Zhu, S.; Zhang, X.; Li, L.E. Robust multimodal vehicle detection in foggy weather using complementary lidar and radar signals. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 444–453. [Google Scholar]
- Zhang, X.; Jin, Q.; Yu, T.; Xiang, S.; Kuang, Q.; Prinet, V.; Pan, C. Multi-modal spatio-temporal meteorological forecasting with deep neural network. ISPRS J. Photogramm. Remote Sens. 2022, 188, 380–393. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef] [Green Version]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Fei-Fei, L. Imagenet: A large-scale hierarchical image database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 22–24 June 2009; IEEE: Hoboken, NJ, USA, 2009; pp. 248–255. [Google Scholar]
- Glorot, X.; Bengio, Y. Understanding the difficulty of training deep feedforward neural networks. In Proceedings of the Thirteenth International Conference on Artificial Intelligence and Statistics, JMLR Workshop and Conference Proceedings, Sardinia, Italy, 13–15 May 2010; pp. 249–256. [Google Scholar]
- Loshchilov, I.; Hutter, F. Decoupled weight decay regularization. arXiv 2017, arXiv:1711.05101. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Ke, G.; Meng, Q.; Finley, T.; Wang, T.; Chen, W.; Ma, W.; Ye, Q.; Liu, T.Y. Lightgbm: A highly efficient gradient boosting decision tree. In Proceedings of the Advances in Neural Information Processing Systems 30 (NIPS 2017), Long Beach, CA, USA, 4–9 December 2017; Volume 30. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. In Proceedings of the Advances in Neural Information Processing Systems 30 (NIPS 2017), Long Beach, CA, USA, 4–9 December 2017; Volume 30.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Prediction | No Fog | Fog | |
|---|---|---|---|
| Real | |||
| No Fog | True Negative (C) | False Positive (F) | |
| Fog | False Negative (M) | True Positive (H) | |
| Models | Accuracy | POD | SR | CSI |
|---|---|---|---|---|
| RF | 0.609 | 0.553 | 0.692 | 0.443 |
| RF * | 0.581 | 0.455 | 0.696 | 0.380 |
| LGBM | 0.608 | 0.519 | 0.708 | 0.427 |
| LGBM * | 0.604 | 0.500 | 0.713 | 0.416 |
| GRU | 0.568 | 0.856 | 0.579 | 0.528 |
| ResNet−50 | 0.715 | 0.908 | 0.687 | 0.642 |
| STN-SF (Proposed) | 0.799 | 0.886 | 0.785 | 0.713 |
| Models | Accuracy | POD | SR | CSI |
|---|---|---|---|---|
| VGG16 | 0.785 | 0.842 | 0.791 | 0.688 |
| ResNet−18 | 0.793 | 0.833 | 0.806 | 0.694 |
| ResNet−50 | 0.799 | 0.886 | 0.785 | 0.713 |
| Encoder Architecture | Models | Accuracy | POD | SR | CSI |
|---|---|---|---|---|---|
| VGG16 | Random solarization | 0.784 | 0.844 | 0.788 | 0.687 |
| Gaussian blur | 0.772 | 0.865 | 0.764 | 0.682 | |
| Random posterization | 0.785 | 0.842 | 0.791 | 0.688 | |
| Color jitter | 0.741 | 0.919 | 0.708 | 0.667 | |
| Random invert | 0.598 | 0.994 | 0.585 | 0.583 | |
| No augmentation | 0.711 | 0.919 | 0.669 | 0.632 | |
| ResNet−18 | Random solarization | 0.776 | 0.889 | 0.757 | 0.691 |
| Gaussian blur | 0.783 | 0.828 | 0.795 | 0.683 | |
| Random posterization | 0.793 | 0.833 | 0.806 | 0.694 | |
| Color jitter | 0.773 | 0.890 | 0.752 | 0.688 | |
| Random invert | 0.605 | 0.989 | 0.589 | 0.585 | |
| No augmentation | 0.778 | 0.876 | 0.764 | 0.689 | |
| ResNet−50 | Random solarization | 0.796 | 0.881 | 0.783 | 0.709 |
| Gaussian blur | 0.795 | 0.893 | 0.777 | 0.711 | |
| Random posterization | 0.799 | 0.886 | 0.785 | 0.713 | |
| Color jitter | 0.787 | 0.886 | 0.770 | 0.701 | |
| Random invert | 0.656 | 0.987 | 0.623 | 0.618 | |
| No augmentation | 0.784 | 0.873 | 0.773 | 0.695 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, J.; Lee, Y.J.; Jo, Y.; Kim, J.; Han, J.H.; Kim, K.J.; Kim, Y.T.; Kim, S.B. Spatio-Temporal Network for Sea Fog Forecasting. Sustainability 2022, 14, 16163. https://doi.org/10.3390/su142316163
Park J, Lee YJ, Jo Y, Kim J, Han JH, Kim KJ, Kim YT, Kim SB. Spatio-Temporal Network for Sea Fog Forecasting. Sustainability. 2022; 14(23):16163. https://doi.org/10.3390/su142316163
Chicago/Turabian StylePark, Jinhyeok, Young Jae Lee, Yongwon Jo, Jaehoon Kim, Jin Hyun Han, Kuk Jin Kim, Young Taeg Kim, and Seoung Bum Kim. 2022. "Spatio-Temporal Network for Sea Fog Forecasting" Sustainability 14, no. 23: 16163. https://doi.org/10.3390/su142316163
APA StylePark, J., Lee, Y. J., Jo, Y., Kim, J., Han, J. H., Kim, K. J., Kim, Y. T., & Kim, S. B. (2022). Spatio-Temporal Network for Sea Fog Forecasting. Sustainability, 14(23), 16163. https://doi.org/10.3390/su142316163