



MEC-Enabled Fine-Grained Task Offloading for UAV Networks in Urban Environments

Abstract
1. Introduction
1.1. Motivation
- Dynamic deployment of drone platforms: The city is in a dynamic environment, and mobile intelligent devices will access and exit the network at any time. Therefore, the cloud service model is required to have strong dynamic perception and the ability to adapt to the external environment, which requires the UAV platform to improve the ability to dynamically deploy according to user conditions and puts forward higher requirements for network flexibility.
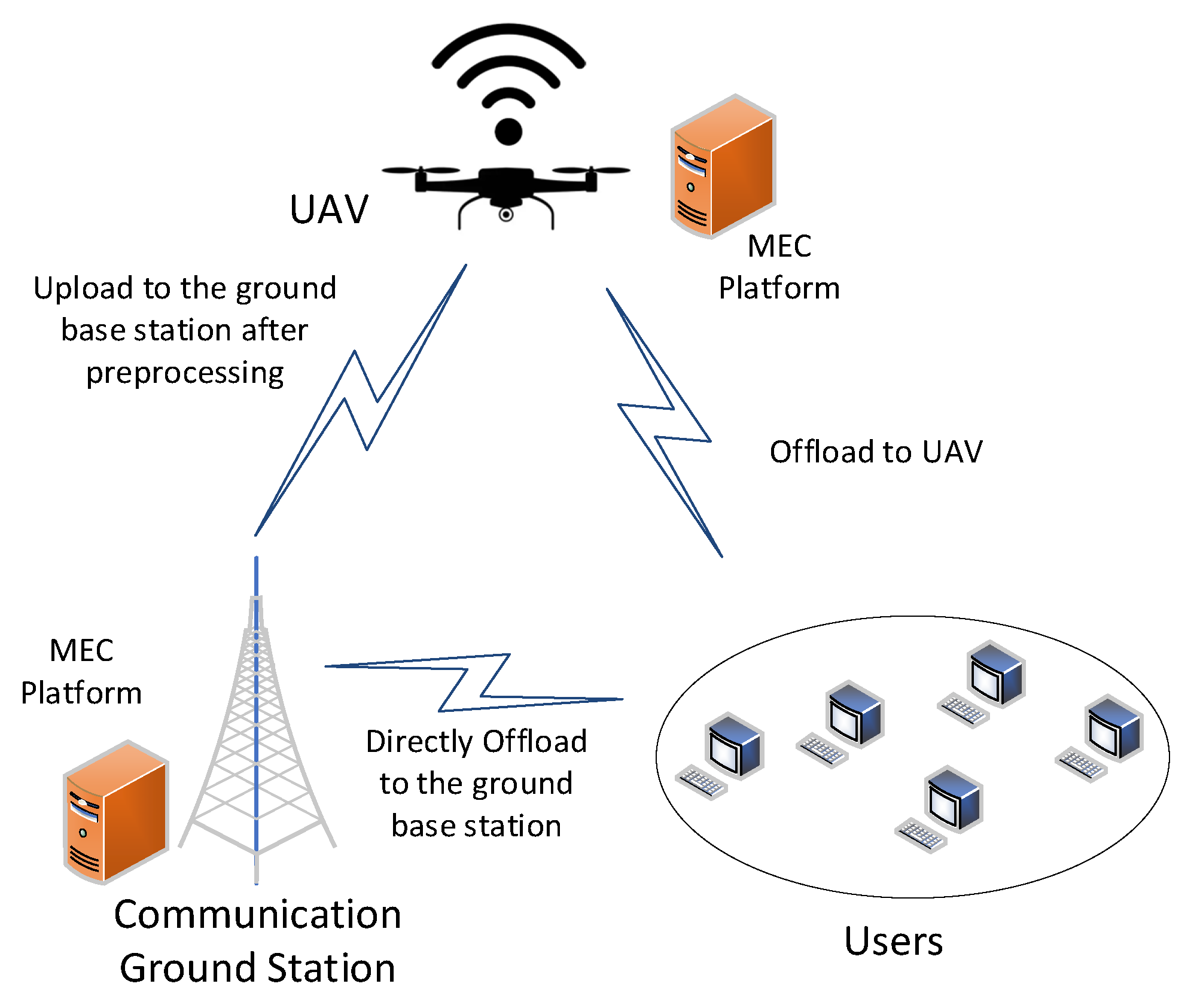
- Uninstallation decision-making problem: With the continuous enhancement of the computing and storage capabilities of mobile smart devices, some computing tasks can be carried out in real time on mobile smart devices in the urban environment, which promotes the evolution of computing models from centralized to distributed [14]. However, mobile smart devices are unable to complete computing-intensive and time-sensitive tasks alone because of the rather limited resources. Therefore, task offloading and collaboration computing are needed to offload part or all of the computing tasks to the MEC platform on the UAV. The edge node can not only directly process the computing task and then return the execution result but also pre-process the task before delivering it to the cloud center for processing in the case of good network conditions and heavy task load. Afterwards, when performing task offloading, we need to compare the time latency of offloading tasks with different processors under certain cost constraints, so that the question of where the task is to be offloaded (that is, to the local or the edge server using the UAV platform as the carrier) is considered.
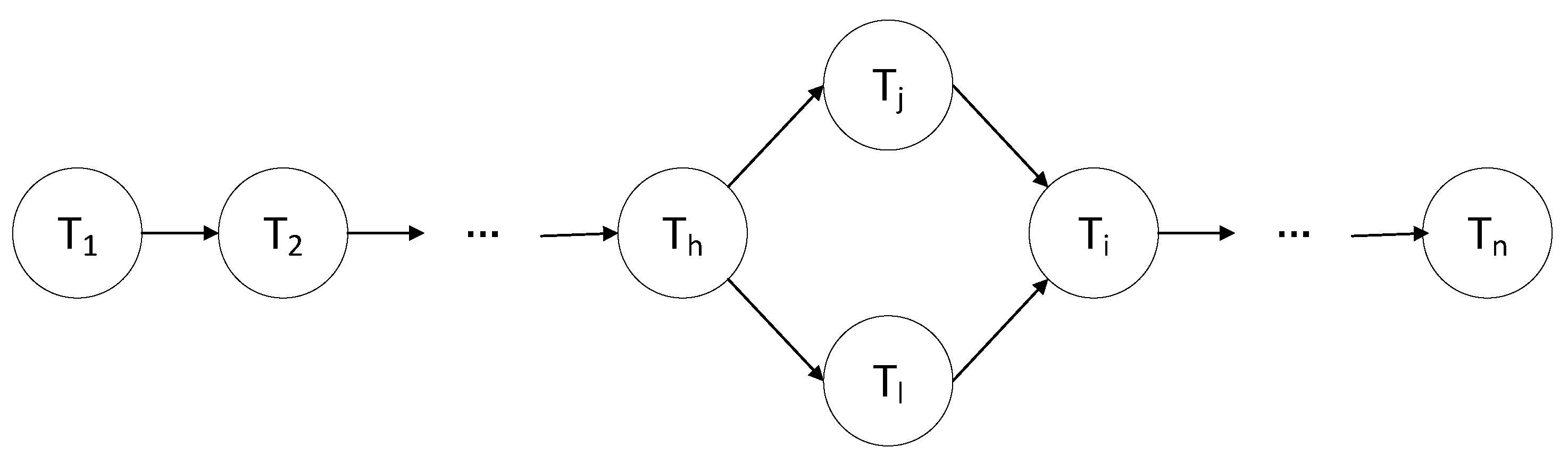
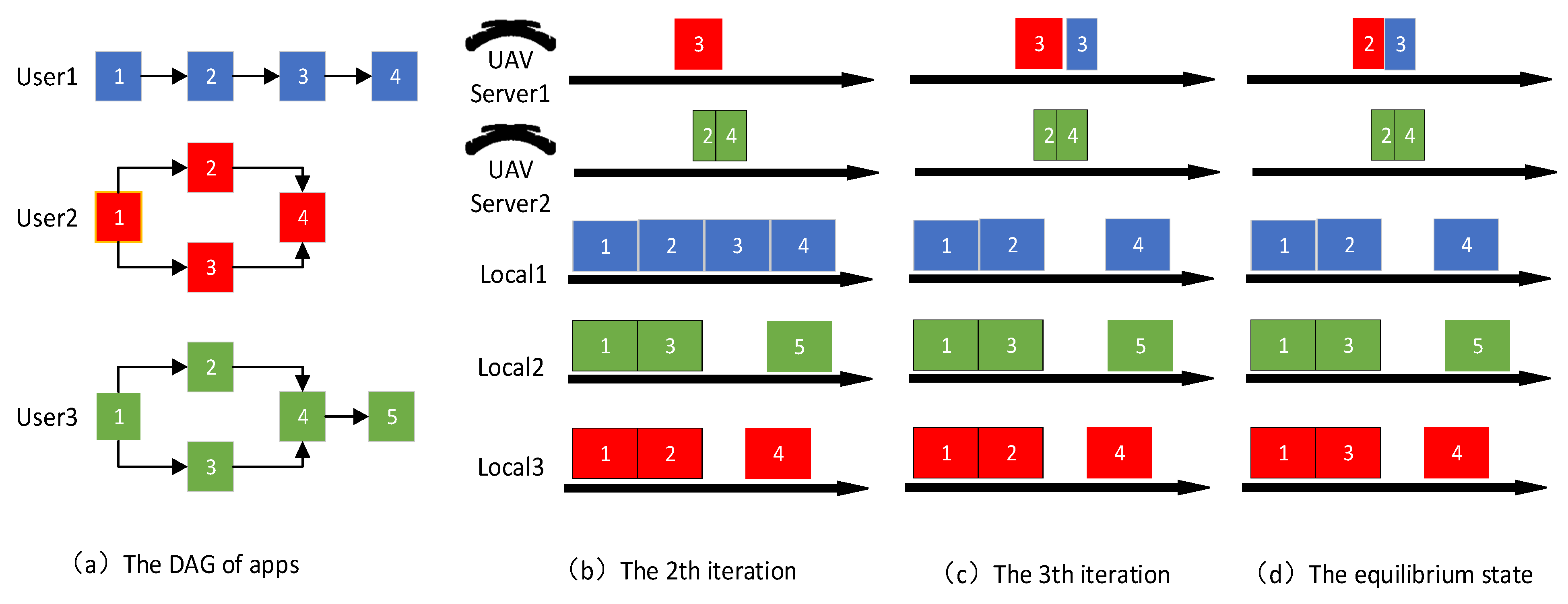
- Fine-grained problem of task offloading: In urban environments, most tasks that need to be processed can generally be decomposed into sub-tasks of different sizes, with certain context dependencies or parallelism. For example, in route navigation, it can be simply divided into “confirm the target–confirm the traffic–confirm the route”. The offloading process for such tasks is called fine-grained task offloading.
1.2. Related Work
1.3. Novelty and Contribution
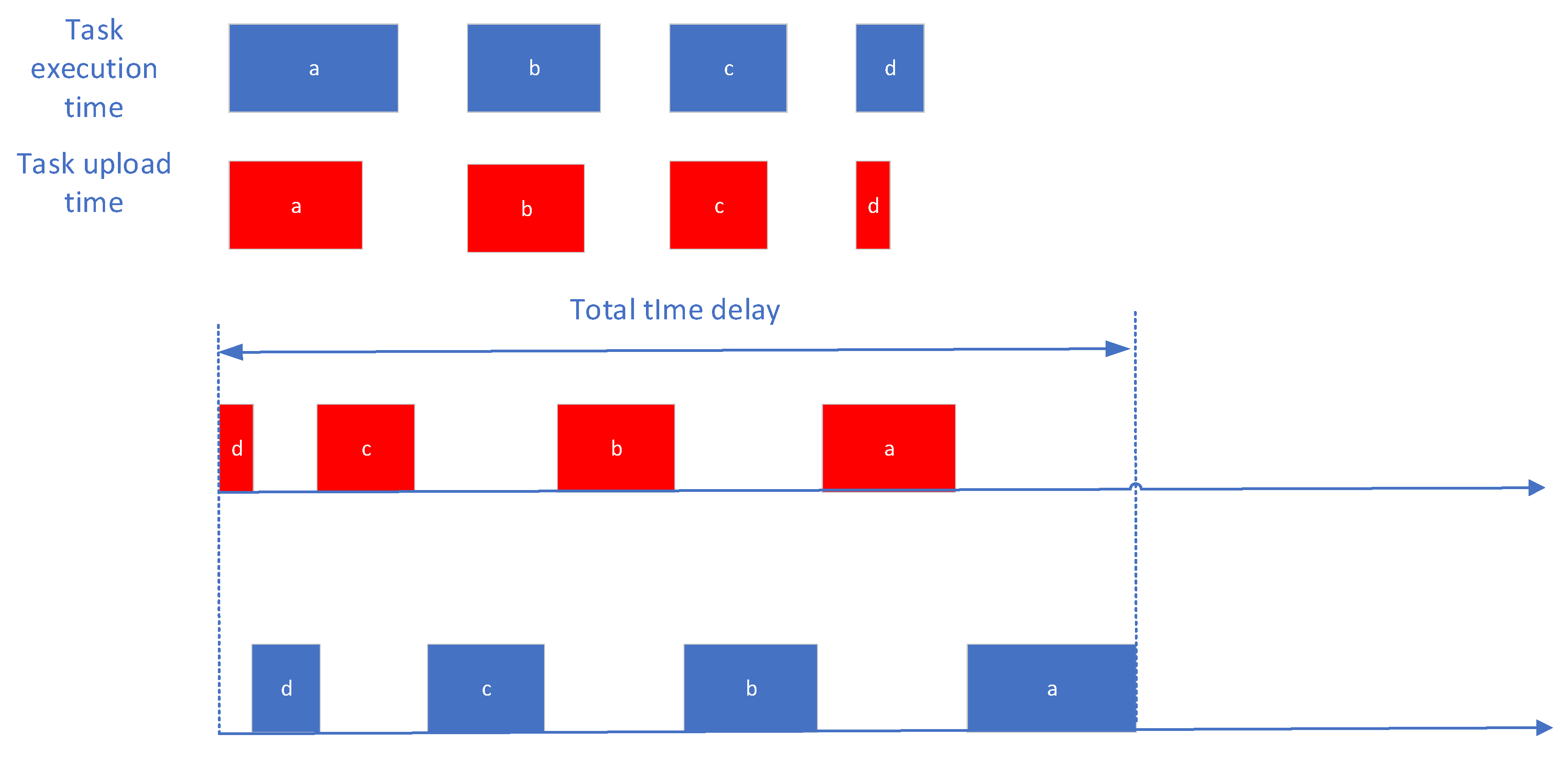
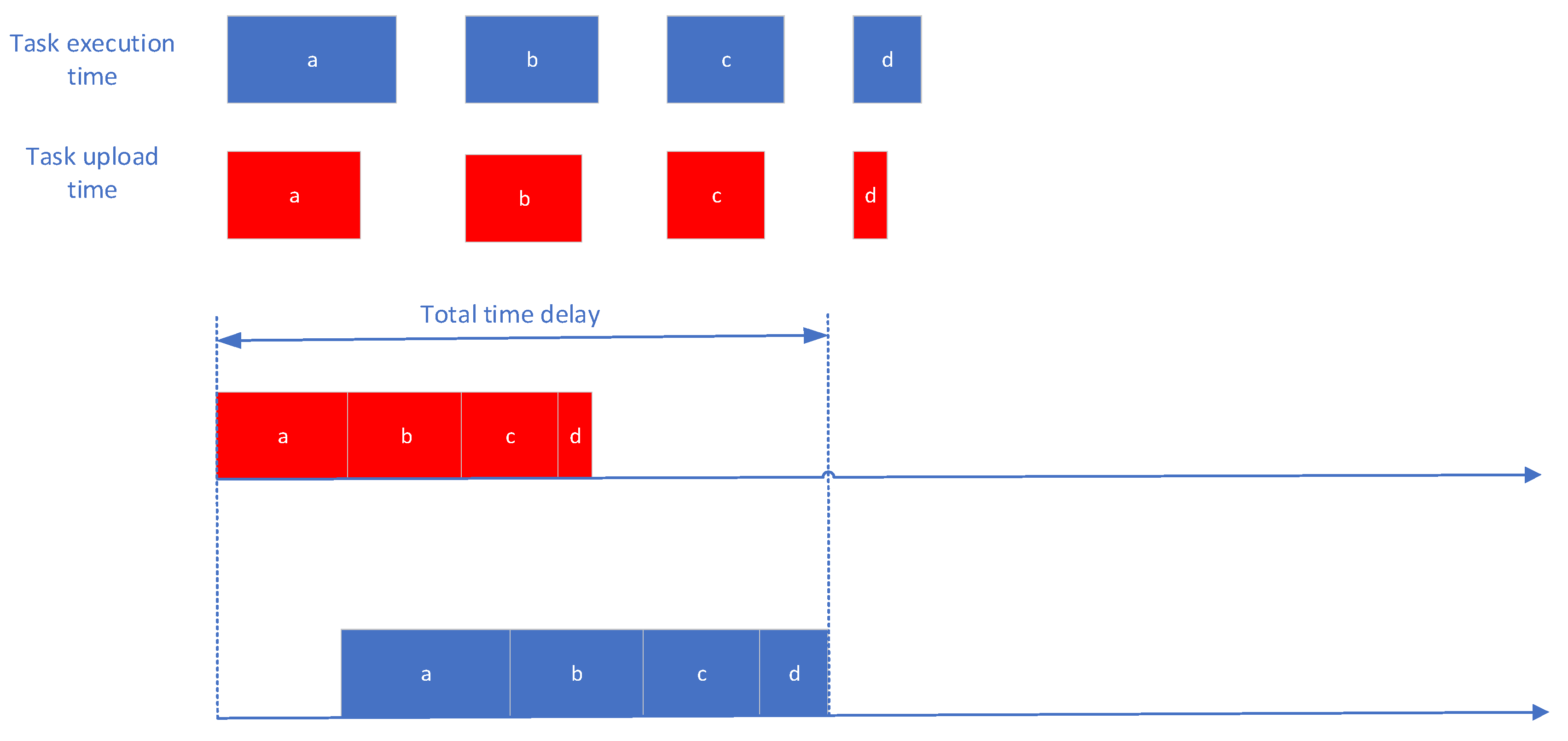
- A UAV-assisted MEC system is constructed, and factors such as task dependencies, task transmission costs, and computational energy consumption are considered. The actual start and finish times of sub-task offloading to the UAV edge server are defined, and the computational offloading problem of the UAV-assisted MEC system is modeled.
- Combined with the constructed system model and relying on the network resource scheduling capability of SDN, two improved EFO algorithms are proposed for multi-mobile user scenarios in the urban environment.
- Based on the UAV platform, the performance of the two algorithms is compared through experiments. The comparison results show that the two task unloading strategies are superior in different application scenarios.
2. UAV Edge Network Modeling
2.1. System Model
2.2. Problem Formulation
3. UAV Edge Network
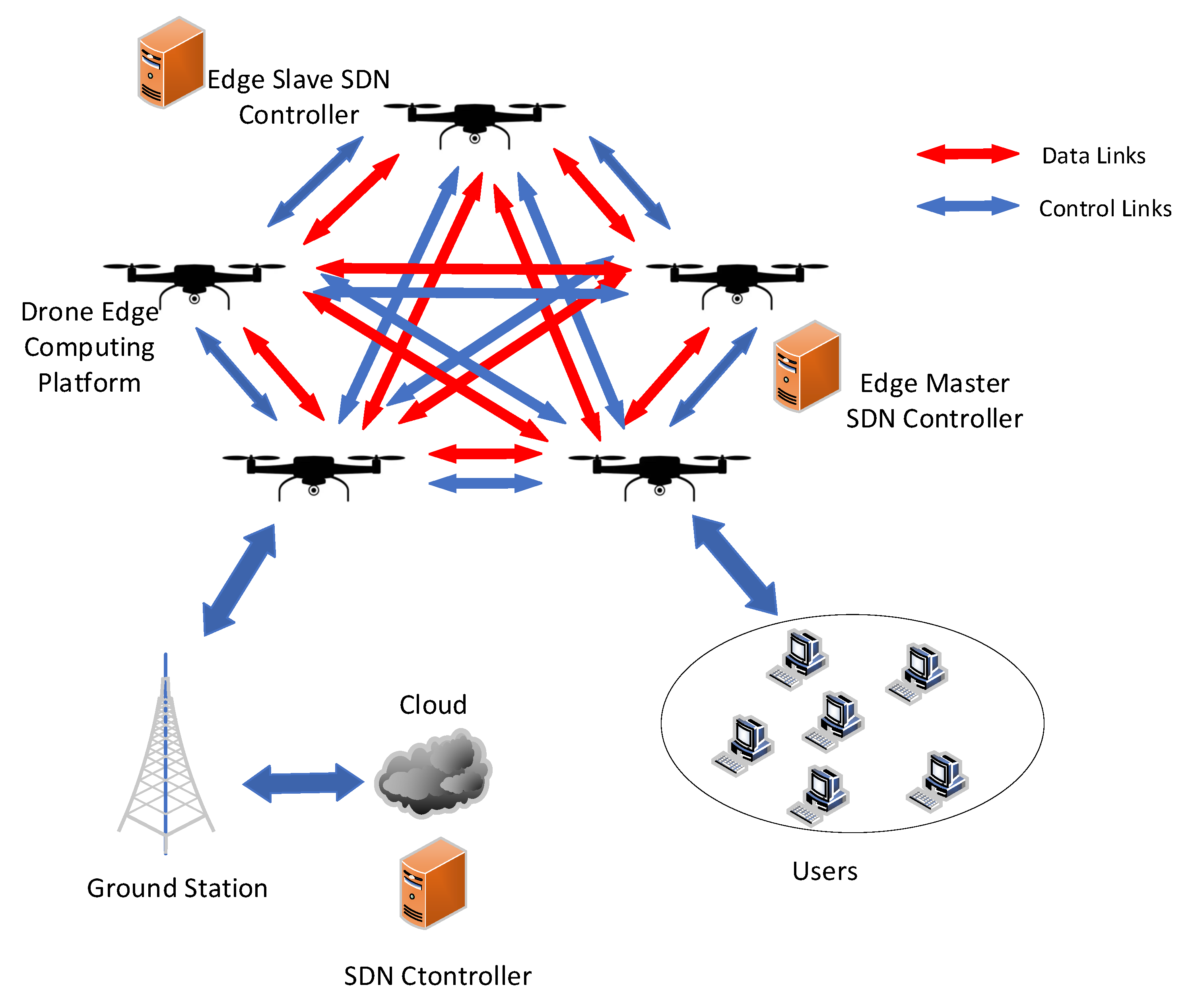
3.1. Architecture Pattern
- SDN borrows the ideas of software definition to realize the programmable UAV edge network, which makes the network more flexible and open, the deployment of new applications and services more convenient, and the network management simpler.
- The SDN controller collects and processes network-wide information and pools and shares the resources of the UAV platform and user equipment, which facilitates comprehensive planning and management of resources, thus making better decisions in terms of resource scheduling, load balancing, and path selection.
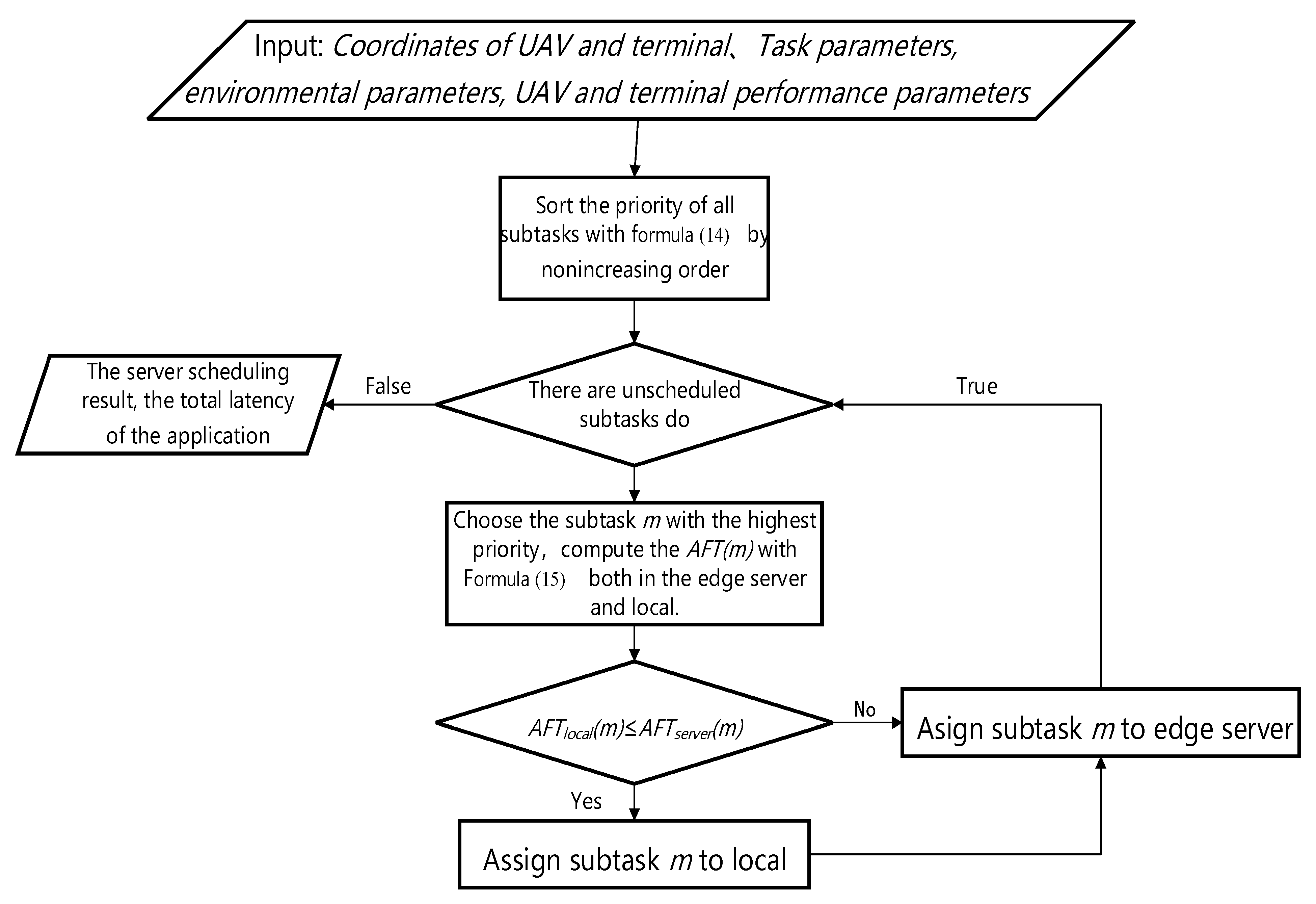
3.2. Algorithm Construction
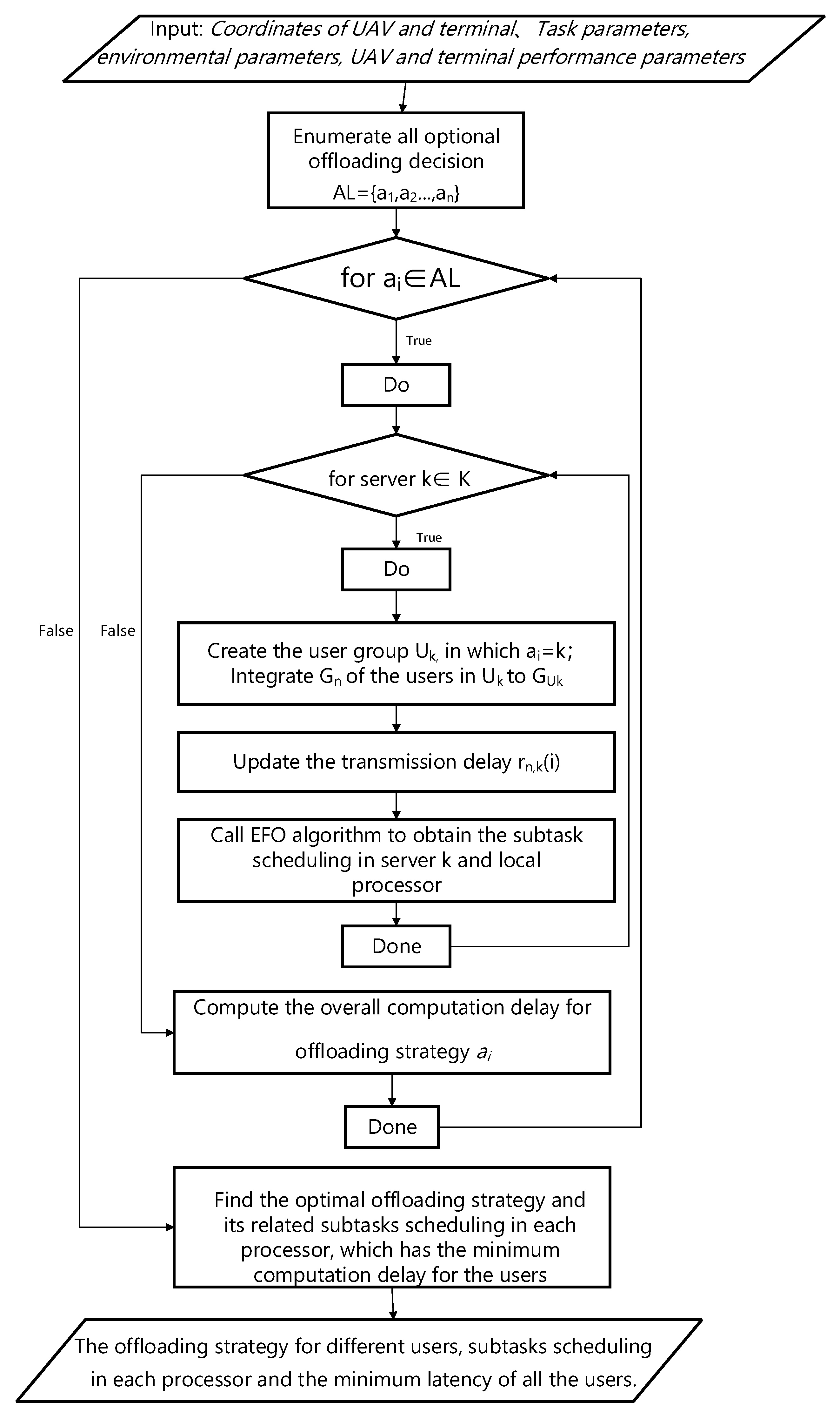
3.2.1. Centralized EFO Algorithm
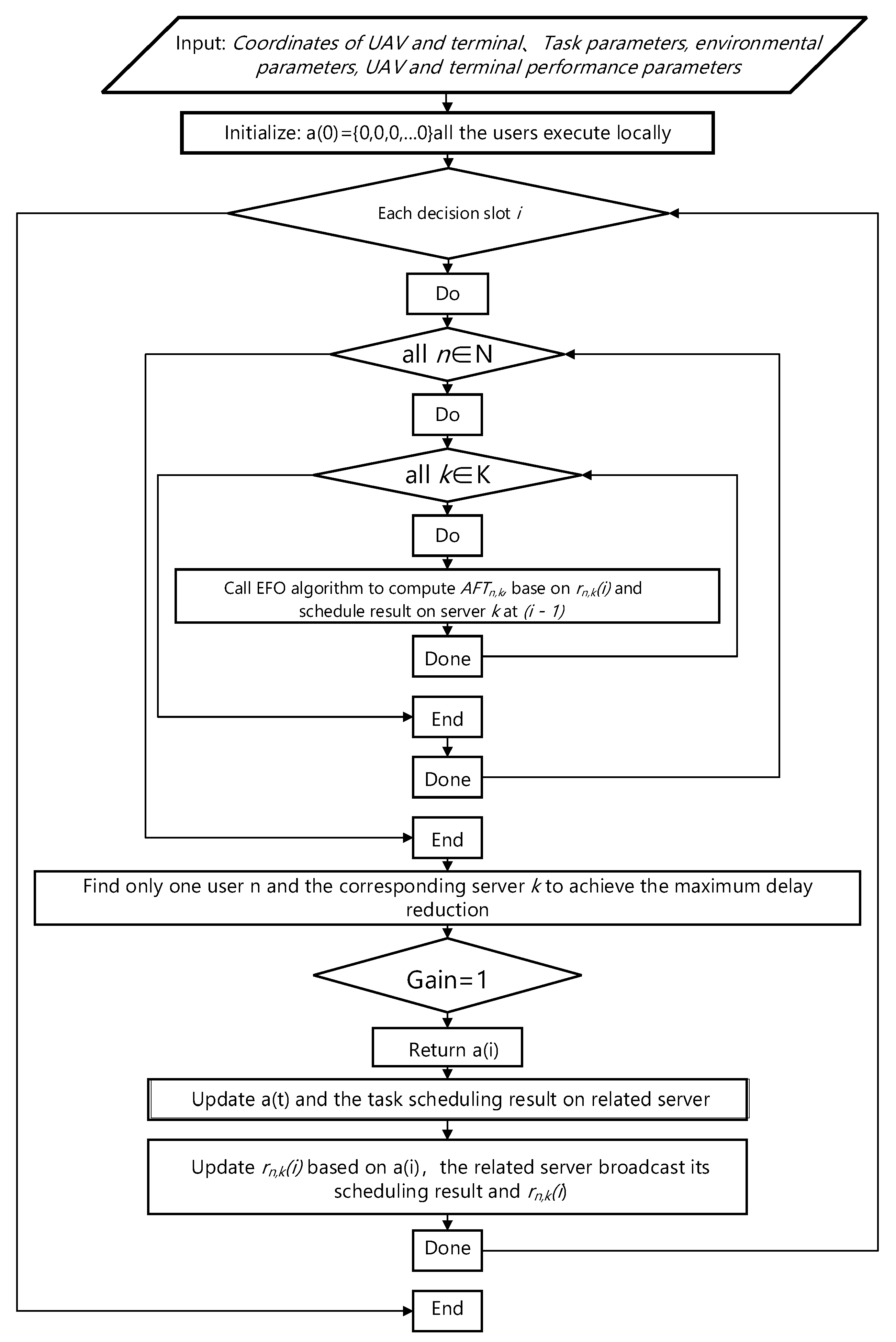
3.2.2. Distributed EFO Algorithm
3.2.3. Computational Complexity
4. Experimental Evaluation and Comparison
4.1. Experimental Evaluation
4.2. Algorithm Characteristics
4.3. Comparative Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Andrawes, A.; Nordin, R.; Albataineh, Z.; Alsharif, M.H. Sustainable delay minimization strategy for mobile edge computing offloading under different network scenarios. Sustainability 2021, 13, 12112. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, L.; Zhao, Y.; Choo, K.-K.R.; Zhang, Y. Privacy-preserving aggregation-authentication scheme for safety warning system in Fog-Cloud based VANET. IEEE Trans. Inf. Forensics Secur. 2022, 17, 317–331. [Google Scholar] [CrossRef]
- Wu, M.; Tan, L.; Xiong, N. A structure fidelity approach for big data collection in wireless sensor networks. Sensors 2014, 15, 248–273. [Google Scholar] [CrossRef]
- Guo, W.; Xiong, N.; Chao, H.-C.; Hussain, S.; Chen, G. Design and analysis of self-adapted task scheduling strategies in wireless sensor networks. Sensors 2011, 11, 6533–6554. [Google Scholar] [CrossRef] [PubMed]
- Friedman, V. On the Edge: Solving the Challenges of Edge Computing in the Era of IoT. 2018. Available online: https://data-economy.com/on-the-edge-solving-the-challenges-of-edge-computing-in-the-era-of-iot/ (accessed on 20 June 2022).
- Yang, G.; Hou, L.; He, X.; He, D.; Chan, S.; Guizani, M. Offloading time optimization via Markov decision process in mobile-edge computing. IEEE Internet Things J. 2020, 8, 2483–2493. [Google Scholar] [CrossRef]
- Wei, F.; Chen, S.; Zou, W. A greedy algorithm for task offloading in mobile edge computing system. China Commun. 2018, 15, 149–157. [Google Scholar] [CrossRef]
- Tran, T.X.; Pompili, D. Joint task offloading and resource allocation for multi-server mobile-edge computing networks. IEEE Trans. Veh. Technol. 2018, 68, 856–868. [Google Scholar] [CrossRef]
- Hu, Q.; Cai, Y.; Yu, G.; Qin, Z.; Zhao, M.; Li, G.Y. Joint offloading and trajectory design for UAV-enabled mobile edge computing systems. IEEE Internet Things J. 2018, 6, 1879–1892. [Google Scholar] [CrossRef]
- Wu, C.; Ju, B.; Wu, Y.; Lin, X.; Xiong, N.; Xu, G.; Li, H.; Liang, X. UAV autonomous target search based on deep reinforcement learning in complex disaster scne. IEEE Access 2019, 7, 117227–117245. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Li, B.; Zhao, S.; Miao, R.; Zhang, R. A survey on unmanned aerial vehicle relaying networks. IET Commun. 2021, 15, 1262–1272. [Google Scholar] [CrossRef]
- Wang, K.; Song, M.; Li, M. Cooperative Multi-UAV Conflict Avoidance Planning in a Complex Urban Environment. Sustainability 2021, 13, 6807. [Google Scholar] [CrossRef]
- Li, S.; Maddah-Ali, M.A.; Yu, Q.; Avestimehr, A.S. A fundamental tradeoff between computation and communication in distributed computing. IEEE Trans. Inf. Theory 2017, 64, 109–128. [Google Scholar] [CrossRef]
- Yang, P.; Xiong, N.N.; Ren, J. Data security and privacy protection for cloud storage: A survey. IEEE Access 2020, 8, 131723–131740. [Google Scholar] [CrossRef]
- Cheng, N.; Xu, W.; Shi, W.; Zhou, Y.; Lu, N.; Zhou, H.; Shen, X. Air-ground integrated mobile edge networks: Architecture, challenges, and opportunities. IEEE Commun. Mag. 2018, 56, 26–32. [Google Scholar] [CrossRef]
- Chen, W.; Liu, B.; Huang, H.; Guo, S.; Zheng, Z. When UAV swarm meets edge-cloud computing: The QoS perspective. IEEE Netw. 2019, 33, 36–43. [Google Scholar] [CrossRef]
- Cao, X.; Xu, J.; Zhangt, R. Mobile edge computing for cellular-connected UAV: Computation offloading and trajectory optimization. In Proceedings of the 2018 IEEE 19th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Kalamata, Greece, 25–28 June 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Zhang, Q.; Chen, J.; Ji, L.; Feng, Z.; Han, Z.; Chen, Z. Response delay optimization in mobile edge computing enabled UAV swarm. IEEE Trans. Veh. Technol. 2020, 69, 3280–3295. [Google Scholar] [CrossRef]
- Messous, M.-A.; Sedjelmaci, H.; Houari, N.; Senouci, S.-M. Computation offloading game for an UAV network in mobile edge computing. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Guo, H.; Liu, J.; Ren, J.; Zhang, Y. Intelligent task offloading in vehicular edge computing networks. IEEE Wirel. Commun. 2020, 27, 126–132. [Google Scholar] [CrossRef]
- Mitsis, G.; Apostolopoulos, P.A.; Tsiropoulou, E.E.; Papavassiliou, S. Intelligent dynamic data offloading in a competitive mobile edge computing market. Future Internet 2019, 11, 118. [Google Scholar] [CrossRef]
- Poularakis, K.; Iosifidis, G.; Tassiulas, L. SDN-enabled tactical ad hoc networks: Extending programmable control to the edge. IEEE Commun. Mag. 2018, 56, 132–138. [Google Scholar] [CrossRef]
- Zhao, L.; Yang, K.; Tan, Z.; Li, X.; Sharma, S.; Liu, Z. A novel cost optimization strategy for SDN-enabled UAV-assisted vehicular computation offloading. IEEE Trans. Intell. Transp. Syst. 2020, 22, 3664–3674. [Google Scholar] [CrossRef]
- Shu, C.; Zhao, Z.; Han, Y.; Min, G.; Duan, H. Multi-user offloading for edge computing networks: A dependency-aware and latency-optimal approach. IEEE Internet Things J. 2020, 7, 1678–1689. [Google Scholar] [CrossRef]
- Xu, J.; Zeng, Y.; Zhang, R. UAV-enabled wireless power transfer: Trajectory design and energy optimization. IEEE Trans. Wirel. Commun. 2018, 17, 5092–5106. [Google Scholar] [CrossRef]
- Xiong, F.; Li, A.; Wang, H.; Tang, L. An SDN-MQTT based communication system for battlefield UAV swarms. IEEE Commun. Mag. 2019, 57, 41–47. [Google Scholar] [CrossRef]
- Peng, H.; Ye, Q.; Shen, X.S. SDN-based resource management for autonomous vehicular networks: A multi-access edge computing approach. IEEE Wirel. Commun. 2019, 26, 156–162. [Google Scholar] [CrossRef]
- Wu, D.; Wang, J.; Hu, R.Q.; Cai, Y.; Zhou, L. Energy-efficient resource sharing for mobile device-to-device multimedia communications. IEEE Trans. Veh. Technol. 2014, 63, 2093–2103. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, H.; Li, X.; Ji, H.; Leung, V.C.M. A Distributed Computation Offloading Strategy in Small-Cell Networks Integrated With Mobile Edge Computing. IEEE/ACM Trans. Netw. 2018, 26, 2762–2773. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Title 1 | Title 2 |
|---|---|
| GPU | 128-core Maxwell |
| CPU | Quad-core Arm A57 @ 1.43 GHz |
| Memory | 4 GB 64-bit LPDDR4x at 25.6 GB/s |
| Peak performance | 472 GFLOPs |
| Native precision support | FP16/FP32 |
| Storage | Micro SD card slot or 16 GB eMMC flash |
| Operating temperature | Ranges between −25 and 80 Celsius |
| Power consumption | 5 W/10 W |
| Physical dimensions | 69 mm × 45 mm |
| Weight | 140 g |
| Price | USD 99 |
| User number | Number of servers | Number of iterations | ||||||||
| 1 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 | ||
| Time delay/ms | ||||||||||
| 50 | 5 | 245.8 | 233.4 | 219.8 | 208.8 | 202.2 | 200.8 | 197.4 | 196.1 | 196.7 |
| 10 | 240.6 | 226.9 | 211.0 | 201.0 | 188.3 | 179.1 | 173.1 | 168.7 | 166.7 | |
| 100 | 5 | 253.1 | 246.4 | 238.3 | 232.3 | 228.9 | 227.0 | 221.5 | 220.5 | 220.0 |
| 10 | 250.7 | 244.0 | 236.8 | 230.0 | 224.6 | 218.8 | 213.5 | 208.3 | 206.7 | |
| Number of users | Number of servers | Number of iterations | ||||||||
| 45 | 50 | 55 | 60 | 65 | 70 | 80 | 90 | 100 | ||
| Latency/ms | ||||||||||
| 50 | 5 | 194.7 | 192.7 | 196.7 | 196.8 | 195.1 | 195.4 | 196.7 | 196.8 | 195.4 |
| 10 | 161.0 | 159.7 | 158.0 | 158.0 | 158.0 | 158.0 | 158.0 | 158.0 | 158.0 | |
| 100 | 5 | 217.0 | 216.0 | 215.7 | 215.6 | 215.0 | 212.9 | 214.0 | 217.8 | 215.3 |
| 10 | 203.3 | 200.2 | 198.6 | 194.8 | 195.5 | 194.8 | 192.0 | 190.1 | 191.0 | |
| Running Time/ms | Algorithm Type | ||
|---|---|---|---|
| Number of Users | CEFO | DEFO | |
| 1 | 0.072 | 0.0072 | |
| 2 | 0.05 | 0.05 | |
| 3 | 0.01 | 0.01 | |
| 4 | 0.02 | 0.02 | |
| 5 | 1.139 | 0.032 | |
| 6 | 8.733 | 0.03 | |
| 7 | 69.79 | 0.016 | |
| 8 | 717.7 | 0.031 | |
| Latency/ms | Algorithm Type | ||
|---|---|---|---|
| Number of Users | CEFO | DEFO | |
| 1 | 94.0 | 94.0 | |
| 2 | 94.0 | 94.0 | |
| 3 | 102.3 | 105.0 | |
| 4 | 109.3 | 111.5 | |
| 5 | 118.5 | 120.8 | |
| 6 | 124.0 | 125.3 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, S.; Zheng, H.; Ma, C. MEC-Enabled Fine-Grained Task Offloading for UAV Networks in Urban Environments. Sustainability 2022, 14, 13809. https://doi.org/10.3390/su142113809
Yu S, Zheng H, Ma C. MEC-Enabled Fine-Grained Task Offloading for UAV Networks in Urban Environments. Sustainability. 2022; 14(21):13809. https://doi.org/10.3390/su142113809
Chicago/Turabian StyleYu, Sicong, Huiji Zheng, and Caihong Ma. 2022. "MEC-Enabled Fine-Grained Task Offloading for UAV Networks in Urban Environments" Sustainability 14, no. 21: 13809. https://doi.org/10.3390/su142113809
APA StyleYu, S., Zheng, H., & Ma, C. (2022). MEC-Enabled Fine-Grained Task Offloading for UAV Networks in Urban Environments. Sustainability, 14(21), 13809. https://doi.org/10.3390/su142113809