
System Optimization of Shared Mobility in Suburban Contexts


Abstract
:1. Introduction
2. Shared Mobility: Evidence from Previous Research
3. Methodology
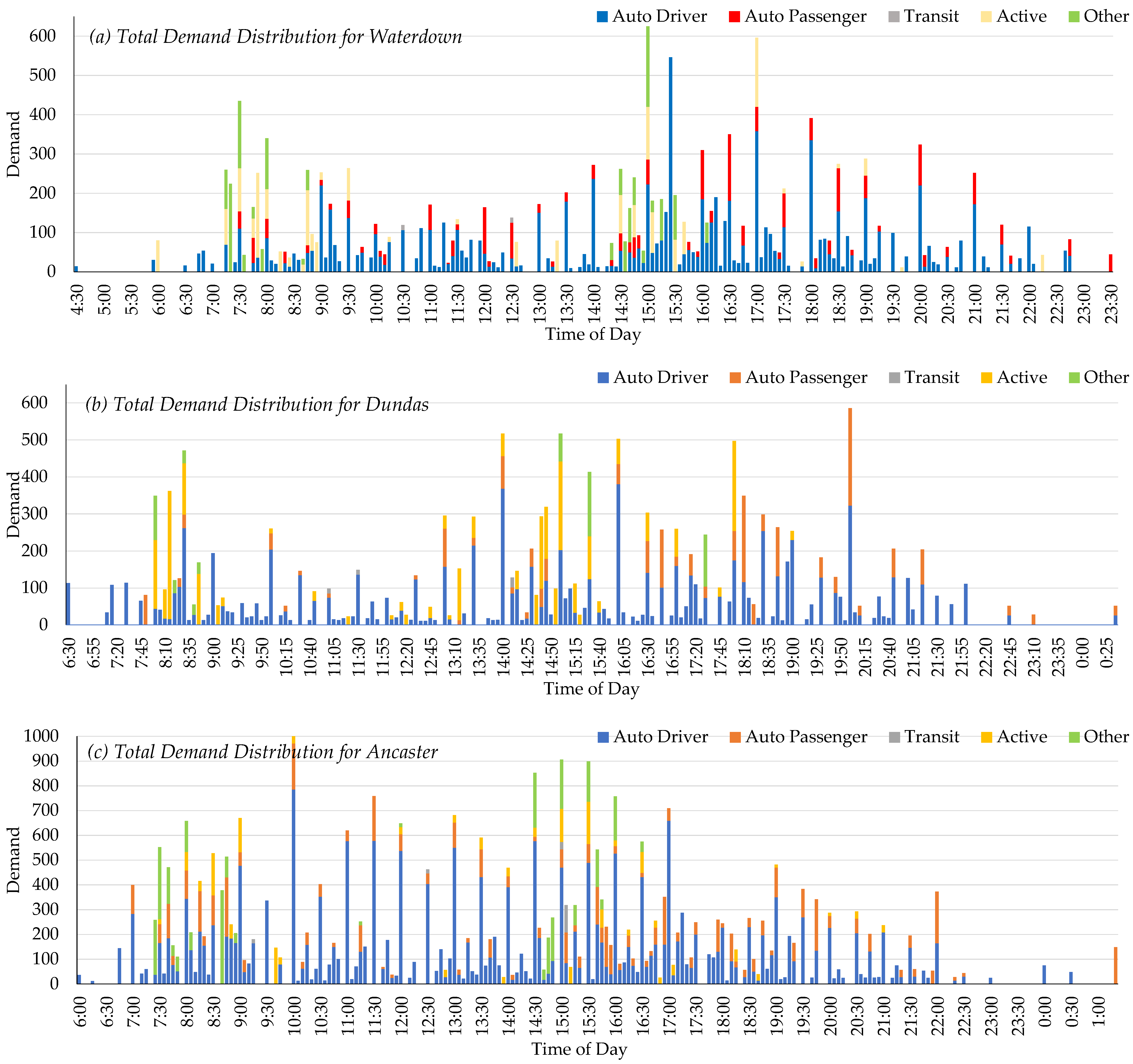
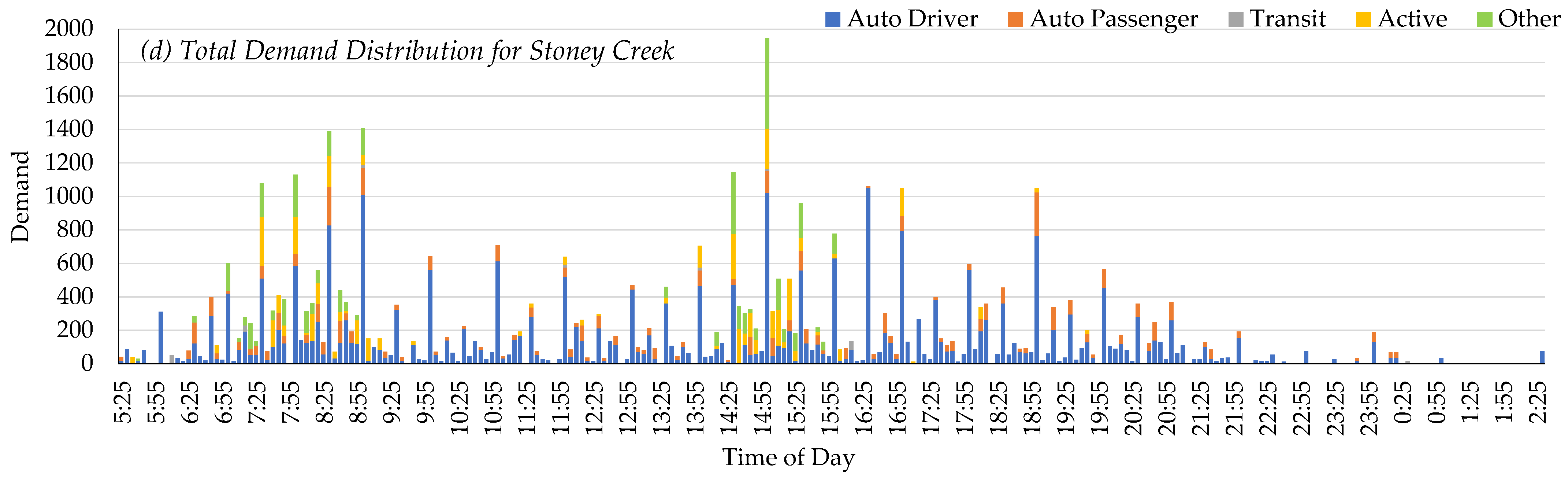
3.1. Travel Demand Data and Case Study
3.2. Scenario Development and Assumptions
- Travel distances were all calculated in Manhattan format.
- The study focused on intra-community known travel demand data for each community. Therefore, the demand data only account for trips with an origin and destination located within the same community.
- Requests with the same pick-up and drop-off locations and time windows were aggregated. This was due to the high demand, especially during peak hours.
- A parking location was assumed to be at the center of the service area, the closest location to all TAZs of the region.
- According to the suburban nature of our case studies, an average travel speed of 45 kilometres per hour was utilized [40].
- The start of a time window for pick-up was calculated based on the distance between the parking and the pick-up locations, and the start time for customer drop-off was calculated based on the distance between pick-up and drop-off location.
- A 30% increase in the in-vehicle travel time as compared to the shortest route was accepted in this study in order to allow for sharing rides [4]; accordingly, for shared rides, vehicles were allowed to serve customers later compared to the time that was expected when the ride was not shared.
- The duration of each time window was three minutes.
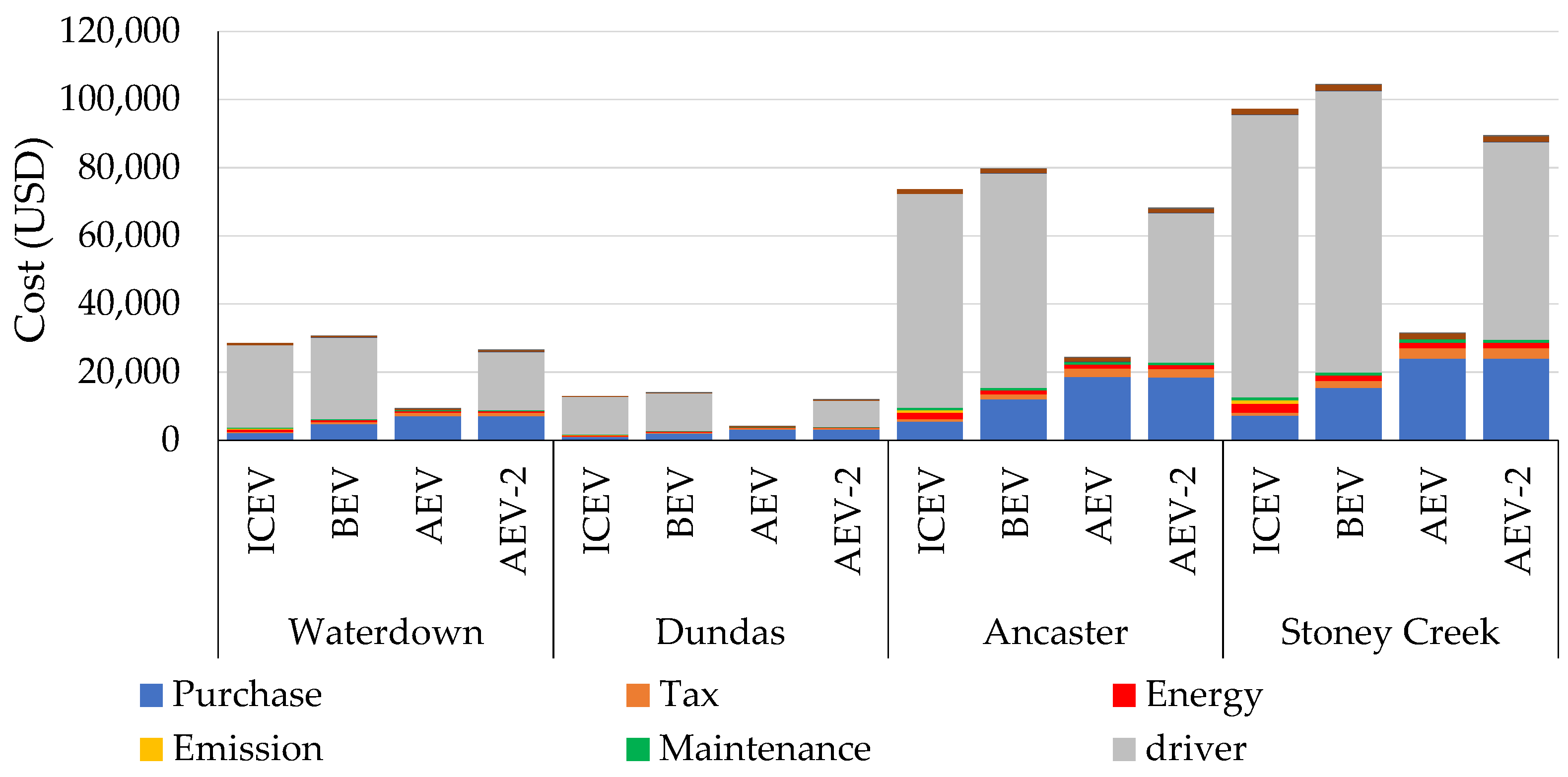
- Driver cost was considered to be a fixed cost assigned to each vehicle. For this purpose, it was assumed that a vehicle was operated for an average of 19 hours on weekdays (based on the demand data) during an effective five-year lifespan of the fleet, with a driver cost of USD 15/hour. Although this rate is low, we assumed wages equal to the average salary of on-demand drivers (USD 15–20).
- Long-range electric vehicles were used, and as the average kilometres travelled per vehicle per day is less than the range of such vehicles, charging time during the day was not considered.
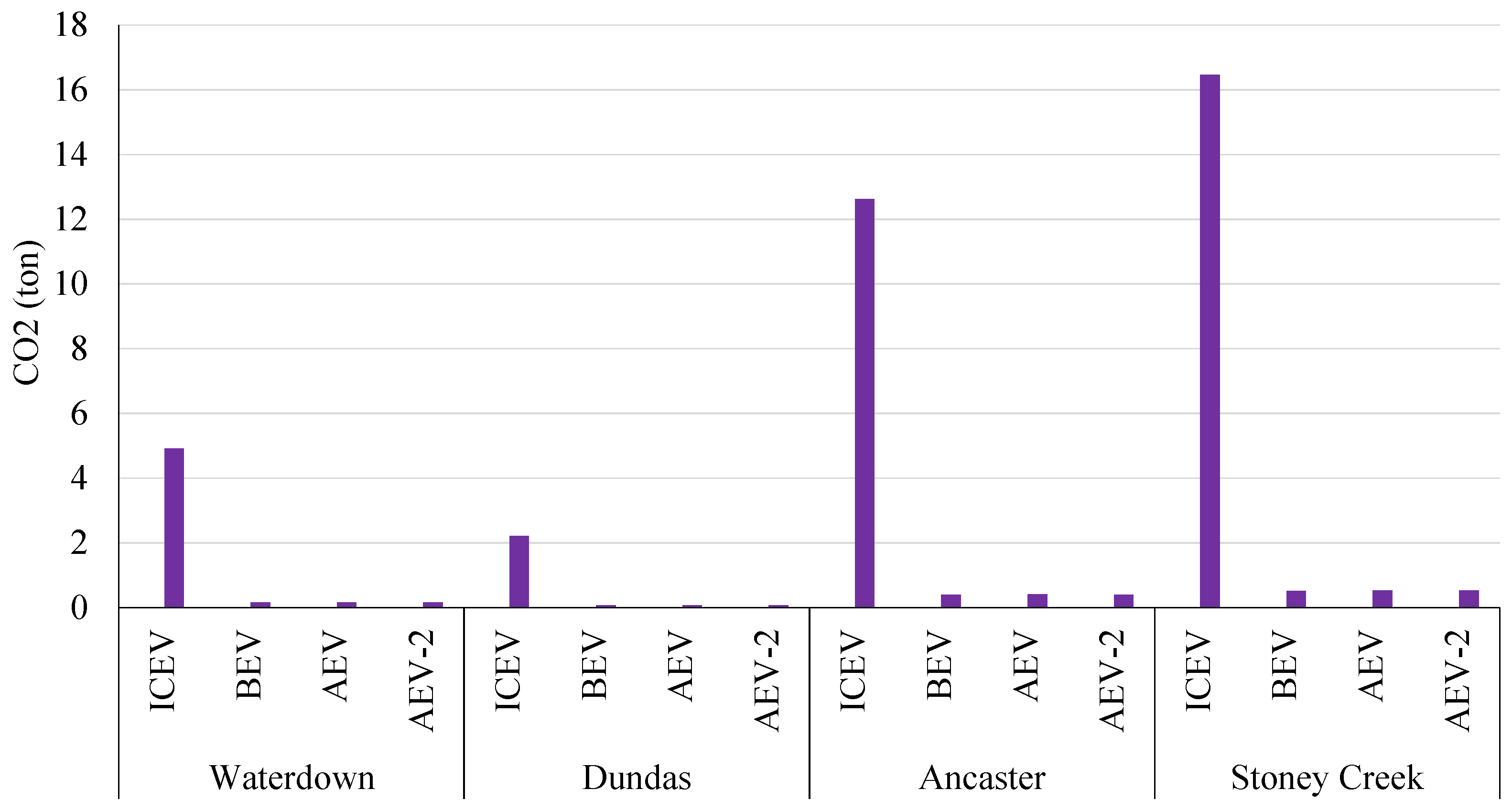
- The CO2 emissions for conventional vehicles (ICEV) were based on tailpipe emissions, while for EVs and AEVs they were based on Well-to-Wheel emissions.
- A price premium of USD 18,000 to USD 40,000 was added incrementally to the purchase price of battery electric vehicles in variable sizes in order to estimate the price of autonomous vehicles not yet available on the market [32].
3.3. Methods
3.4. Cost Parameters
4. Results
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Martinez, L.M.; Viegas, J.M. Assessing the impacts of deploying a shared self-driving urban mobility system: An agent-based model applied to the city of Lisbon, Portugal. Int. J. Transp. Sci. Technol. 2017, 6, 13–27. [Google Scholar] [CrossRef]
- Bruun, E.; Givoni, M. Sustainable mobility: Six research routes to steer transport policy. Nature 2015, 523, 29–31. [Google Scholar] [CrossRef] [Green Version]
- Zegras, C. The Built Environment and Motor Vehicle Ownership and Use: Evidence from Santiago de Chile. Urban Stud. 2010, 47, 1793–1817. [Google Scholar] [CrossRef]
- Burghout, W.; Rigole, P.J.; Andreasson, I. Impacts of shared autonomous taxis in a metropolitan area. In Proceedings of the 94th Annual Meeting of the Transportation Research Board, Washington DC, USA, 11–15 January 2015. [Google Scholar]
- Cervero, R. Transport Infrastructure and Global Competitiveness: Balancing Mobility and Livability. Ann. Am. Acad. Political Soc. Sci. 2009, 626, 210–225. [Google Scholar] [CrossRef]
- Buehler, R.; Pucher, J. Demand for Public Transport in Germany and the USA: An Analysis of Rider Characteristics. Transp. Rev. 2012, 32, 541–567. [Google Scholar] [CrossRef]
- Bojkovic, N. Shared Mobility for Sustainable Urban Development. Int. J. Trans. Syst. 2018, 3, 11–16. [Google Scholar]
- Köhler, J.; Whitmarsh, L.; Nykvist, B.; Schilperoord, M.; Bergman, N.; Haxeltine, A. A transitions model for sustainable mobility. Ecol. Econ. 2009, 68, 2985–2995. [Google Scholar] [CrossRef]
- Enoch, M. Sustainable Transport, Mobility Management and Travel Plans; Routledge: Abingdon, UK, 2016. [Google Scholar]
- Illgen, S.; Höck, M. Establishing car sharing services in rural areas: A simulation-based fleet operations analysis. Transportation 2018, 47, 811–826. [Google Scholar] [CrossRef]
- Kröger, L.; Kickhöfer, B.; Kuhnimhof, T. Autonomous Car- and Ride-Sharing Systems: A Simulation-Based Analysis of Impacts on Travel Demand in Urban, Suburban and Rural German Regions. 2017. Available online: https://transp-or.epfl.ch/heart/2017/abstracts/hEART2017_paper_186.pdf (accessed on 15 December 2021).
- Ruch, C.; Lu, C.; Sieber, L.; Frazzoli, E. Quantifying the Benefits of Ride Sharing. 2019. Available online: https://www.research-collection.ethz.ch/bitstream/handle/20.500.11850/367142/1/WorkingPaper_QuantifyingtheBenefitsofRideSharing.pdf (accessed on 15 December 2021).
- Burns, L.D.; Jordan, W.C.; Scarborough, B.A. Transforming personal mobility. Earth Inst. 2013, 431, 432. [Google Scholar]
- Joseph, R. Ride-Sharing Services: The Tumultuous Tale of the Rural Urban Divide. 2018. Available online: https://aisel.aisnet.org/amcis2018/AdoptionDiff/Presentations/4/ (accessed on 15 December 2021).
- Pinto, H.K.; Hyland, M.F.; Mahmassani, H.S.; Verbas, I. Joint design of multimodal transit networks and shared autonomous mobility fleets. Transp. Res. Part C Emerg. Technol. 2019, 113, 2–20. [Google Scholar] [CrossRef]
- Shaheen, S.A.; Cohen, A.; Farrar, E. Mobility on Demand: Evolving and Growing Shared Mobility in the Suburbs of Northern Virginia. In Implications of Mobility as a Service (MaaS) in Urban and Rural Environments: Emerging Research and Opportunities; IGI Global: Hershey, PA, USA, 2020; pp. 125–155. [Google Scholar]
- Ehlers, C. Mobility of the Future–Connected, Autonomous, Shared, Electric. In Proceedings of the 30th International AVL Conference, Engine Environment, Graz, Austria, 7–8 June 2018; Volume 30, pp. 175–178. [Google Scholar]
- Hansen, S.; Newbold, K.B.; Scott, D.M.; Vrkljan, B.; Grenier, A. To drive or not to drive: Driving cessation amongst older adults in rural and small towns in Canada. J. Transp. Geogr. 2020, 86, 102773. [Google Scholar] [CrossRef]
- Hansen, A.Y.; Meyer, M.R.U.; Lenardson, J.D.; Hartley, D. Built Environments and Active Living in Rural and Remote Areas: A Review of the Literature. Curr. Obes. Rep. 2015, 4, 484–493. [Google Scholar] [CrossRef]
- Shaheen, S.; Cohen, A.; Zohdy, I. Shared Mobility: Current Practices and Guiding Principles (No. FHWA-HOP-16-022); Federal Highway Administration: Washington, DC, USA, 2016. [Google Scholar]
- Burghard, U.; Dütschke, E. Who wants shared mobility? Lessons from early adopters and mainstream drivers on electric car-sharing in Germany. Trans. Res. Part D Trans. Environ. 2019, 71, 96–109. [Google Scholar] [CrossRef]
- Henao, A.; Marshall, W.E. The impact of ride-hailing on vehicle miles traveled. Transportation 2019, 46, 2173–2194. [Google Scholar] [CrossRef]
- Cohen, A.; Shaheen, S. Planning for Shared Mobility. 2018. Available online: https://escholarship.org/content/qt0dk3h89p/qt0dk3h89p.pdf (accessed on 15 December 2021).
- Fiedler, D.; Čertický, M.; Alonso-Mora, J.; Čáp, M. The impact of ride-sharing in mobility-on-demand systems: Simulation case study in Prague. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 1173–1178. [Google Scholar]
- Ma, S.; Zheng, Y.; Wolfson, O. Real-time city-scale taxi ride-sharing. IEEE Trans. Knowl. Data Eng. 2014, 27, 1782–1795. [Google Scholar] [CrossRef]
- Boisjoly, G.; Deboosere, R.; Wasfi, R.; Orpana, H.; Manaugh, K.; Buliung, R.; El-Geneidy, A. Accessibility to healthcare via public transport across Canada. In Proceedings of the 98th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 7–11 January 2018. [Google Scholar]
- Kornhauser, A.L. Smart Driving Cars. 11 August 2013. Available online: http://smartdrivingcar.com/ataxis-for-nj-08.11.13.html (accessed on 15 December 2021).
- Di Febbraro, A.; Gattorna, E.; Sacco, N. Optimization of dynamic ride-sharing systems. Transp. Res. Rec. 2013, 2359, 44–50. [Google Scholar] [CrossRef]
- Tafreshian, A.; Masoud, N. Trip-based graph partitioning in dynamic ride-sharing. Transp. Res. Part C Emerg. Technol. 2020, 114, 532–553. [Google Scholar] [CrossRef]
- Stoiber, T.; Schubert, I.; Hoerler, R.; Burger, P. Will consumers prefer shared and pooled-use autonomous vehicles? A stated choice experiment with Swiss households. Transp. Res. Part D Transp. Environ. 2019, 71, 265–282. [Google Scholar] [CrossRef]
- Bischoff, J.; Maciejewski, M. Simulation of City-wide Replacement of Private Cars with Autonomous Taxis in Berlin. Procedia Comput. Sci. 2016, 83, 237–244. [Google Scholar] [CrossRef] [Green Version]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Papa, E.; Ferreira, A. Sustainable Accessibility and the Implementation of Automated Vehicles: Identifying Critical Decisions. Urban Sci. 2018, 2, 5. [Google Scholar] [CrossRef] [Green Version]
- Cohen, T.; Cavoli, C. Automated vehicles: Exploring possible consequences of government (non)intervention for congestion and accessibility. Transp. Rev. 2019, 39, 129–151. [Google Scholar] [CrossRef] [Green Version]
- Zhong, S.; Cheng, R.; Li, X.; Wang, Z.; Jiang, Y. Identifying the combined effect of shared autonomous vehicles and congestion pricing on regional job accessibility. J. Transp. Land Use 2020, 13, 273–297. [Google Scholar] [CrossRef]
- Milakis, D.; Kroesen, M.; van Wee, B. Implications of automated vehicles for accessibility and location choices: Evidence from an expert-based experiment. J. Transp. Geogr. 2018, 68, 142–148. [Google Scholar] [CrossRef]
- Hyland, M.; Mahmassani, H.S. Operational benefits and challenges of shared-ride automated mobility-on-demand services. Transp. Res. Part A Policy Pract. 2020, 134, 251–270. [Google Scholar] [CrossRef]
- Litman, T. Evaluating Public Transit Benefits and Costs; Victoria Transport Policy Institute: Victoria, BC, Canada, 2015. [Google Scholar]
- Chen, T.D.; Kockelman, K.M. Management of a Shared Autonomous Electric Vehicle Fleet: Implications of Pricing Schemes. Transp. Res. Rec. J. Transp. Res. Board 2016, 2572, 37–46. [Google Scholar] [CrossRef]
- Chen, T.D.; Kockelman, K.M.; Hanna, J.P. Operations of a shared, autonomous, electric vehicle fleet: Implications of vehicle & charging infrastructure decisions. Transp. Res. Part A Policy Pract. 2016, 94, 243–254. [Google Scholar] [CrossRef] [Green Version]
- Nykvist, B.; Nilsson, M. Rapidly falling costs of battery packs for electric vehicles. Nat. Clim. Chang. 2015, 5, 329–332. [Google Scholar] [CrossRef]
- Loeb, B.; Kockelman, K.M. Fleet performance and cost evaluation of a shared autonomous electric vehicle (SAEV) fleet: A case study for Austin, Texas. Transp. Res. Part A Policy Pract. 2019, 121, 374–385. [Google Scholar] [CrossRef]
- Pavlenko, N.; Slowik, P.; Lutsey, N. When Does Electrifying Shared Mobility Make Economic Sense; The International Council on Clean Transportation: Beijing, China, 2019. [Google Scholar]
- Data Management Group, University of Toronto. Available online: www.dmg.utoronto.ca/transportation-tomorrow-survey (accessed on 9 May 2021).
- Census Data for Hamilton; Pereira, V. J-Horizon: A Vehicle Routing Problem Software (Computer Software). 2017. Available online: https://sourceforge.net/projects/j-horizon/files/ (accessed on 15 December 2021).
- Schrimpf, G.; Schneider, J.; Stamm-Wilbrandt, H.; Dueck, G. Record breaking optimization results using the ruin and recreate principle. J. Comput. Phys. 2000, 159, 139–171. [Google Scholar] [CrossRef] [Green Version]
- Available online: www.hamilton.ca/moving-hamilton/community-profile/census-data-hamilton (accessed on 9 May 2021).
- Braekers, K.; Ramaekers, K.; Van Nieuwenhuyse, I. The vehicle routing problem: State of the art classification and review. Comput. Ind. Eng. 2016, 99, 300–313. [Google Scholar] [CrossRef]
- Pisinger, D.; Røpke, S. A general heuristic for vehicle routing problems. Comput. Oper. Res. 2007, 34, 2403–2435. [Google Scholar] [CrossRef]
- Desaulniers, G.; Desrosiers, J.; Erdmann, A.; Solomon, M.M.; Soumis, F. VRP with Pick-up and Delivery. Veh. Routing Probl. 2002, 9, 225–242. [Google Scholar]
- Sun, P.; Veelenturf, L.P.; Hewitt, M.; Van Woensel, T. The time-dependent pick-up and delivery problem with time windows. Transp. Res. Part B Methodol. 2018, 116, 1–24. [Google Scholar] [CrossRef]
- Ropke, S.; Pisinger, D. An adaptive large neighborhood search heuristic for the pick-up and delivery problem with time windows. Transp. Sci. 2006, 40, 455–472. [Google Scholar] [CrossRef] [Green Version]
- Quarles, N.; Kockelman, K.M.; Mohamed, M. Costs and Benefits of Electrifying and Automating Bus Transit Fleets. Sustainability 2020, 12, 3977. [Google Scholar] [CrossRef]
- Bickel, P.; Friedrich, R. External Costs of Transport in Germany. In Social Costs and Sustainability; Springer: Berlin/Heidelberg, Germany, 1997; pp. 341–356. [Google Scholar]
- Sotes, J. A Clearer View on Ontario’s Emissions: Electricity Emissions Factors and Guidelines; The Atmospheric Fund: Toronto, ON, Canada, 2019. [Google Scholar]
- Noori, M.; Gardner, S.; Tatari, O. Electric vehicle cost, emissions, and water footprint in the United States: Development of a regional optimization model. Energy 2015, 89, 610–625. [Google Scholar] [CrossRef]
- Abotalebi, E.; Ferguson, M.R.; Mohamed, M.; Scott, D.M. Design of a survey to assess prospects for consumer electric mobility in Canada: A retrospective appraisal. Transportation 2018, 47, 1223–1250. [Google Scholar] [CrossRef]
- Government of Ontario. Available online: www.ontario.ca/page/government-ontario (accessed on 9 May 2021).
- Nijland, H.; van Meerkerk, J. Mobility and environmental impacts of car sharing in the Netherlands. Environ. Innov. Soc. Transit. 2017, 23, 84–91. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Community | Population | Area (km2) | Population Density (/km2) | Total Trips 1 | Trips per Capita | Number of Intra-Community Trips | Share of Intra-Community Trips % 2 |
|---|---|---|---|---|---|---|---|
| Waterdown | 19,462 | 119 | 163.5 | 30,551 | 1.569 | 15,709 | 51.42 |
| Dundas | 24,285 | 23 | 1055.9 | 36,876 | 1.518 | 15,195 | 41.21 |
| Ancaster | 40,557 | 177 | 229.1 | 75,177 | 1.853 | 32,249 | 42.89 |
| Stoney Creek | 69,470 | 100 | 694.7 | 78,462 | 1.129 | 42,653 | 54.36 |
| Waterdown | Dundas | Ancaster | Stoney Creek | |||||
|---|---|---|---|---|---|---|---|---|
| Mode | Share of Trips (%) | Number of Trips | Share of Trips (%) | Number of Trips | Share of Trips (%) | Number of Trips | Share of Trips (%) | Number of Trips |
| Auto Driver | 60.83% | 9555 | 60.18% | 9144 | 67.70% | 21,834 | 65.77% | 28,051 |
| Auto Passenger | 14.65% | 2301 | 14.73% | 2238 | 17.19% | 5542 | 13.53% | 5772 |
| Public Transit | 0.16% | 26 | 0.35% | 53 | 0.53% | 172 | 0.51% | 219 |
| Active Transport | 13.57% | 2131 | 19.64% | 2985 | 5.52% | 1779 | 10.61% | 4527 |
| Other | 10.8% | 1696 | 5.10% | 775 | 9.06% | 2922 | 9.57% | 4084 |
| Total | - | 15,709 | - | 15,195 | - | 32,249 | - | 42,653 |
| Technology | Purchase & Tax ($) 1 | Maintenance and Repair ($) | Driver ($) | License & Registration ($) | Insurance ($) | Energy ($/km) 2 | CO2 ($/km) | |
|---|---|---|---|---|---|---|---|---|
| 3-seater | ICEV | 29,100 | 2550 | 364,650 | 510 | 7350 | 0.0604 | 0.0102 |
| BEV | 38,600 | 2550 | 364,650 | 510 | 7350 | 0.0142 | 0.0003 | |
| AEV | 59,400 | 2550 | 0 | 510 | 7350 | 0.0142 | 0.0003 | |
| AEV-2 | 59,400 | 2550 | 255,250 | 510 | 7350 | 0.0142 | 0.0003 | |
| 6-seater | ICEV | 29,500 | 2950 | 364,650 | 510 | 7350 | 0.0986 | 0.0166 |
| BEV | 42,800 | 2950 | 364,650 | 510 | 7350 | 0.0184 | 0.0004 | |
| AEV | 71,900 | 2950 | 0 | 510 | 7350 | 0.0184 | 0.0004 | |
| AEV-2 | 71,900 | 2950 | 255,250 | 510 | 7350 | 0.0184 | 0.0004 | |
| 9-seater | ICEV | 38,200 | 3650 | 364,650 | 510 | 7350 | 0.1735 | 0.0262 |
| BEV | 74,800 | 3650 | 364,650 | 510 | 7350 | 0.0288 | 0.0006 | |
| AEV | 112,200 | 3650 | 0 | 510 | 7350 | 0.0288 | 0.0006 | |
| AEV-2 | 112,200 | 3650 | 255,250 | 510 | 7350 | 0.0288 | 0.0006 | |
| 15-seater 3 | ICEV | 36,600 | 4400 | 364,650 | 510 | 7350 | 0.0438 | 0.0180 |
| BEV | 83,100 | 4400 | 364,650 | 510 | 7350 | 0.0288 | 0.0006 | |
| AEV | 128,800 | 4400 | 0 | 510 | 7350 | 0.0288 | 0.0006 | |
| AEV-2 | 128,800 | 4400 | 255,250 | 510 | 7350 | 0.0288 | 0.0006 |
| Context | Scenario | Cost ($)/day | Cost ($)/km | Cost ($)/Passenger | VKT 1 | Occupied VKT | CO2 (ton) | CO2/km 2 | Occupancy (%) |
|---|---|---|---|---|---|---|---|---|---|
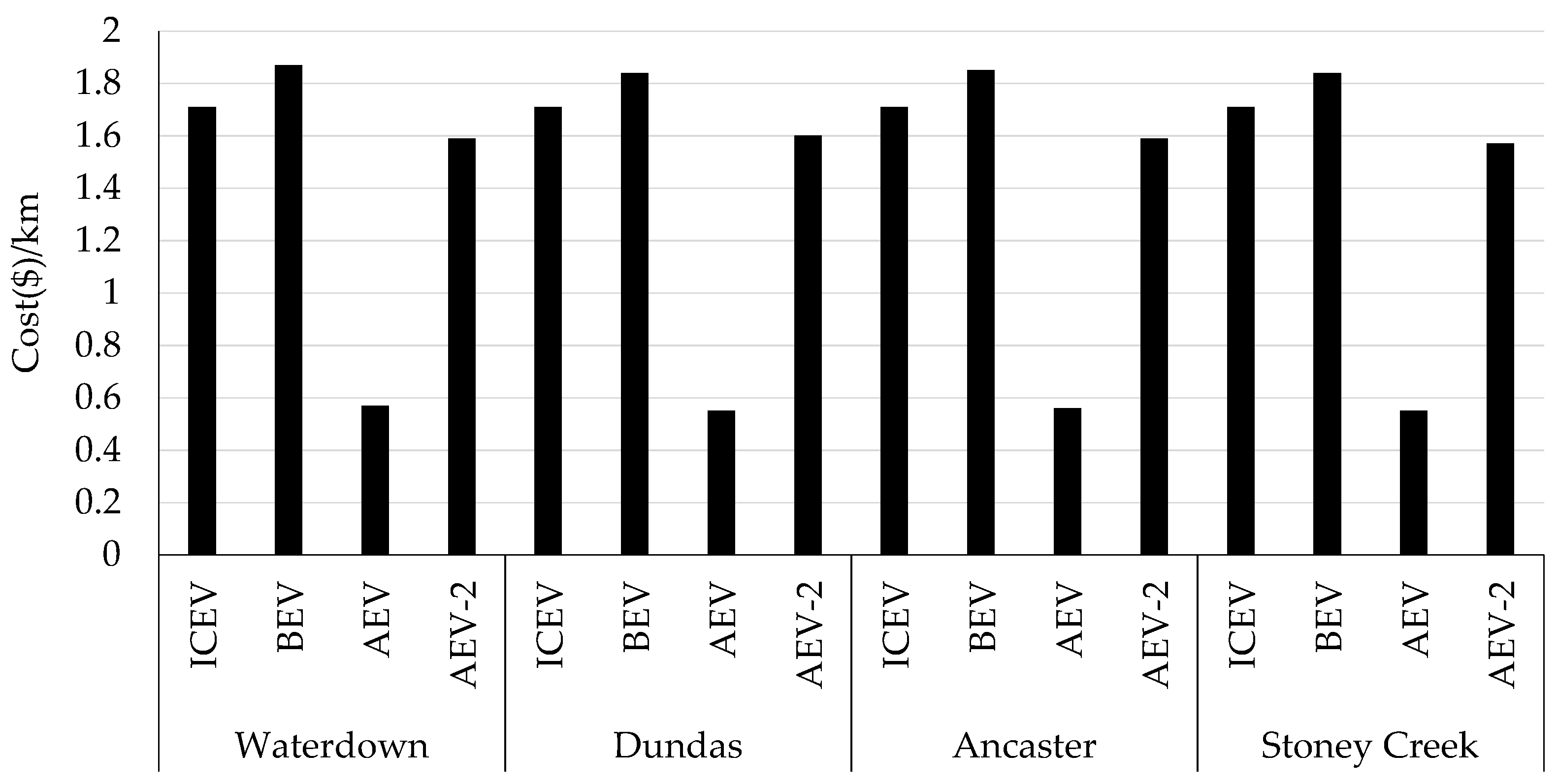
| Waterdown | ICEV | 28,452 | 1.71 | 2.39 | 16,593 | 4432 | 4.907 | 296 | 22.32 |
| BEV | 30,744 | 1.87 | 2.58 | 16,460 | 4344 | 0.158 | 9.6 | 23.99 | |
| AEV | 9363 | 0.57 | 0.79 | 16,561 | 4448 | 0.155 | 9.36 | 24.05 | |
| AEV-2 | 26,617 | 1.59 | 2.24 | 16,731 | 4512 | 0.155 | 9.26 | 23.97 | |
| Dundas | ICEV | 12,983 | 1.71 | 1.14 | 7575 | 3521 | 2.212 | 292 | 39.56 |
| BEV | 14,015 | 1.84 | 1.23 | 7598 | 3561 | 0.069 | 9.08 | 42.55 | |
| AEV | 4213 | 0.55 | 0.37 | 7608 | 3555 | 0.069 | 9.07 | 42.69 | |
| AEV-2 | 12,048 | 1.60 | 1.06 | 7541 | 3537 | 0.069 | 9.15 | 42.69 | |
| Ancaster | ICEV | 73,353 | 1.71 | 2.66 | 42,953 | 16,465 | 12.626 | 294 | 32.04 |
| BEV | 79,088 | 1.85 | 2.87 | 42,692 | 16,029 | 0.397 | 9.3 | 33.65 | |
| AEV | 24,383 | 0.56 | 0.88 | 43,364 | 16,551 | 0.402 | 9.27 | 33.87 | |
| AEV-2 | 68,183 | 1.59 | 2.47 | 42,934 | 16,578 | 0.399 | 9.29 | 33.82 | |
| Stoney Creek | ICEV | 97,249 | 1.71 | 2.84 | 56,758 | 16,458 | 16.460 | 290 | 25.32 |
| BEV | 104,293 | 1.84 | 3.05 | 56,615 | 16,486 | 0.517 | 9.13 | 27.29 | |
| AEV | 31,401 | 0.55 | 0.92 | 56,856 | 16,556 | 0.520 | 9.15 | 27.30 | |
| AEV-2 | 89,242 | 1.57 | 2.61 | 56,692 | 16,496 | 0.519 | 9.15 | 27.35 |
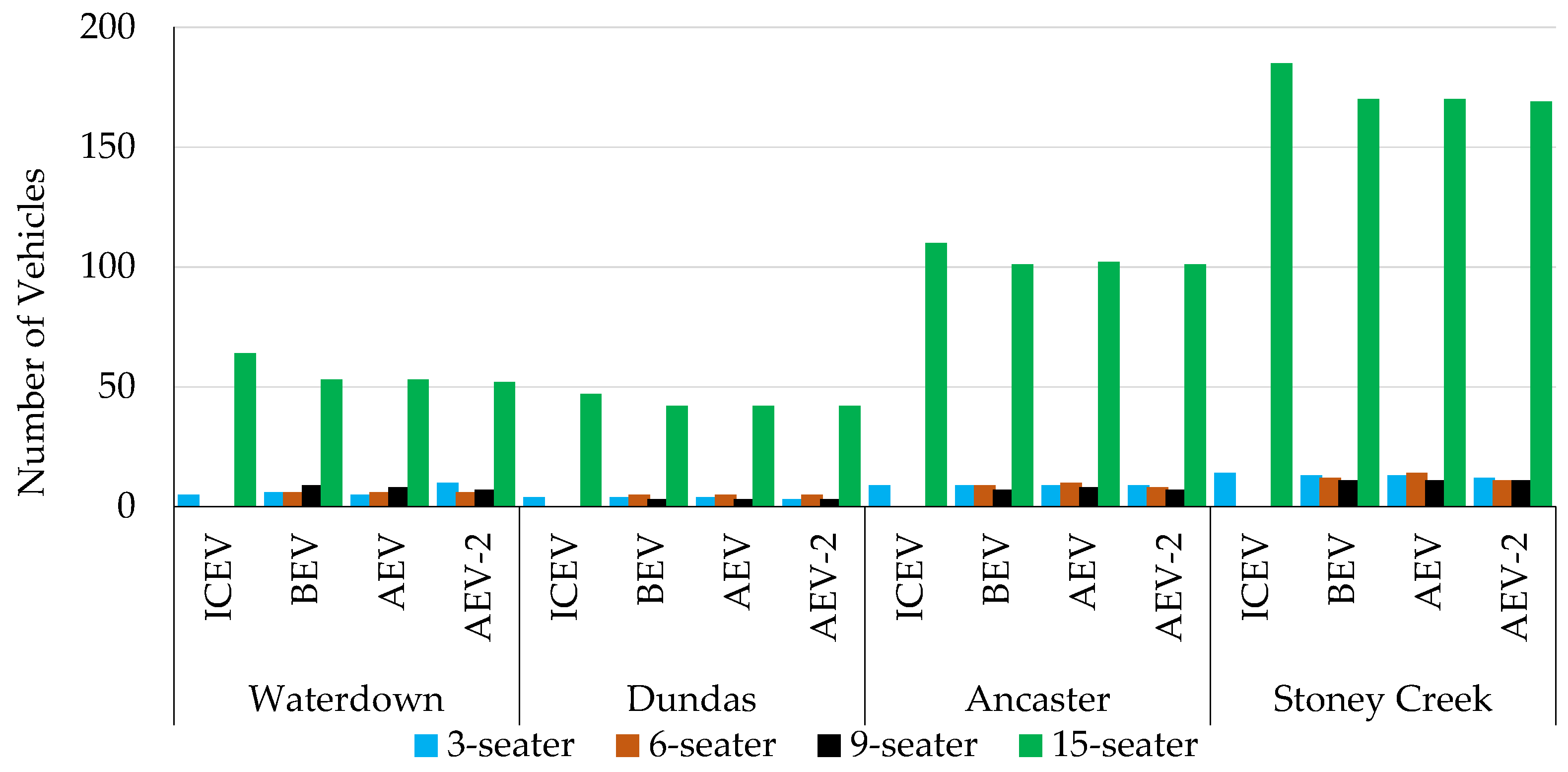
| 3-Seater | 6-Seater | 9-Seater | 15-Seater | Fleet Total | ||
|---|---|---|---|---|---|---|
| Waterdown | ||||||
| ICEV | Occupied and unoccupied 1 | 21.99 | - | - | 39.87 | 38.57 |
| Occupied 2 | 4.98 | - | - | 8.89 | 8.61 | |
| Idling Rate | 78.01 | - | - | 60.13 | 61.43 | |
| BEV | Occupied and unoccupied | 20.20 | 27.19 | 26.15 | 41.65 | 36.85 |
| Occupied | 3.69 | 6.43 | 5.93 | 10.42 | 9.00 | |
| Idling Rate | 79.8 | 72.81 | 73.85 | 58.35 | 63.15 | |
| AEV | Occupied and unoccupied | 23.14 | 27.60 | 28.12 | 40.15 | 36.59 |
| Occupied | 4.75 | 6.49 | 6.16 | 8.96 | 8.15 | |
| Idling Rate | 76.86 | 72.4 | 71.88 | 59.85 | 63.41 | |
| AEV-2 | Occupied and unoccupied | 18.04 | 26.78 | 30.71 | 40.18 | 35.27 |
| Occupied | 6.48 | 6.00 | 7.41 | 8.68 | 8.05 | |
| Idling Rate | 81.96 | 73.22 | 69.29 | 59.82 | 64.73 | |
| Dundas | 3-seater | 6-seater | 9-seater | 15-seater | Fleet Total | |
| ICEV | Occupied and unoccupied | 16.18 | - | - | 20.87 | 20.50 |
| Occupied | 5.02 | - | - | 8.08 | 7.84 | |
| Idling Rate | 83.82 | - | - | 79.13 | 79.50 | |
| BEV | Occupied and unoccupied | 15.16 | 14.68 | 14.61 | 20.39 | 19.15 |
| Occupied | 5.10 | 5.42 | 5.77 | 8.00 | 7.42 | |
| Idling Rate | 84.84 | 85.32 | 85.39 | 79.61 | 80.85 | |
| AEV | Occupied and unoccupied | 16.33 | 16.33 | 12.35 | 20.32 | 19.21 |
| Occupied | 5.55 | 6.00 | 4.59 | 7.97 | 7.42 | |
| Idling Rate | 83.67 | 83.67 | 87.65 | 79.68 | 80.79 | |
| AEV-2 | Occupied and unoccupied | 16.5 | 15.56 | 14.66 | 20.34 | 19.35 |
| Occupied | 5.72 | 6.20 | 6.05 | 7.90 | 7.51 | |
| Idling Rate | 83.5 | 84.44 | 85.34 | 79.66 | 80.65 | |
| Ancaster | 3-seater | 6-seater | 9-seater | 15-seater | Fleet Total | |
| ICEV | Occupied and unoccupied | 30.02 | - | - | 44.89 | 43.77 |
| Occupied | 10.98 | - | - | 15.63 | 15.28 | |
| Idling Rate | 69.98 | - | - | 55.11 | 56.23 | |
| BEV | Occupied and unoccupied | 29.54 | 35.43 | 34.1 | 43.90 | 41.72 |
| Occupied | 10.72 | 11.74 | 12.09 | 15.20 | 14.46 | |
| Idling Rate | 70.46 | 64.57 | 65.9 | 56.10 | 58.28 | |
| AEV | Occupied and unoccupied | 31.36 | 35.00 | 30.67 | 44.22 | 41.77 |
| Occupied | 11.20 | 12.32 | 10.54 | 15.97 | 15.02 | |
| Idling Rate | 68.64 | 65.00 | 69.33 | 55.78 | 58.23 | |
| AEV-2 | Occupied and unoccupied | 30.00 | 37.78 | 34.09 | 43.92 | 41.97 |
| Occupied | 11.02 | 12.76 | 11.96 | 15.46 | 14.77 | |
| Idling Rate | 70.00 | 62.22 | 65.91 | 56.08 | 58.03 | |
| Stoney Creek | 3-seater | 6-seater | 9-seater | 15-seater | Fleet Total | |
| ICEV | Occupied and unoccupied | 32.21 | - | - | 30.42 | 30.55 |
| Occupied | 6.41 | - | - | 7.020 | 6.98 | |
| Idling Rate | 67.79 | - | - | 69.58 | 69.45 | |
| BEV | Occupied and unoccupied | 34.75 | 27.93 | 28.52 | 29.20 | 29.44 |
| Occupied | 7.02 | 7.42 | 6.05 | 6.74 | 6.76 | |
| Idling Rate | 65.25 | 72.07 | 71.48 | 70.80 | 70.56 | |
| AEV | Occupied and unoccupied | 35.63 | 25.16 | 27.40 | 29.31 | 29.32 |
| Occupied | 7.09 | 6.80 | 5.97 | 6.77 | 6.75 | |
| Idling Rate | 64.37 | 74.84 | 72.6 | 70.69 | 70.68 | |
| AEV-2 | Occupied and unoccupied | 37.52 | 30.13 | 27.44 | 29.51 | 29.90 |
| Occupied | 7.42 | 7.92 | 5.77 | 6.83 | 6.87 | |
| Idling Rate | 62.48 | 69.87 | 72.56 | 70.49 | 70.10 | |
| Coefficients | Std Err | Standardized Coefficients | t-Statistic | P > |t| | [0.025 | 0.975] | |
|---|---|---|---|---|---|---|---|
| Trips/Capita | 14.3443 | 0.988 | 0.562 | 14.513 | 0.005 | 10.092 | 18.597 |
| Trips/km2 | 0.0134 | 0.002 | 0.979 | 8.162 | 0.015 | 0.006 | 0.02 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gandomani, R.; Mohamed, M.; Amiri, A.; Razavi, S. System Optimization of Shared Mobility in Suburban Contexts. Sustainability 2022, 14, 876. https://doi.org/10.3390/su14020876
Gandomani R, Mohamed M, Amiri A, Razavi S. System Optimization of Shared Mobility in Suburban Contexts. Sustainability. 2022; 14(2):876. https://doi.org/10.3390/su14020876
Chicago/Turabian StyleGandomani, Roxana, Moataz Mohamed, Amir Amiri, and Saiedeh Razavi. 2022. "System Optimization of Shared Mobility in Suburban Contexts" Sustainability 14, no. 2: 876. https://doi.org/10.3390/su14020876
APA StyleGandomani, R., Mohamed, M., Amiri, A., & Razavi, S. (2022). System Optimization of Shared Mobility in Suburban Contexts. Sustainability, 14(2), 876. https://doi.org/10.3390/su14020876