

A Conflict Measures-Based Extreme Value Theory Approach to Predicting Truck Collisions and Identifying High-Risk Scenes on Two-Lane Rural Highways

Abstract
:1. Introduction
1.1. Background
1.2. Literature Review
1.2.1. Truck Traffic Safety
1.2.2. Collision Prediction Based on Traffic Conflict Measures
1.2.3. Collision Prediction Based on Conflict Extremes Value Theory
1.3. Objective
2. Materials and Methods
2.1. Study Area
2.2. Data Acquisition and Measures Selection
2.2.1. Data Acquisition and Extraction
2.2.2. Traffic Conflict Measures
2.2.3. Traffic Feature Parameters
2.3. Methods
2.3.1. Extreme Value Theory Modeling Approach
2.3.2. Machine Learning Algorithm for Truck Crash Risk Identification
3. Results and Discussion
3.1. Extreme Value Theory Model Results
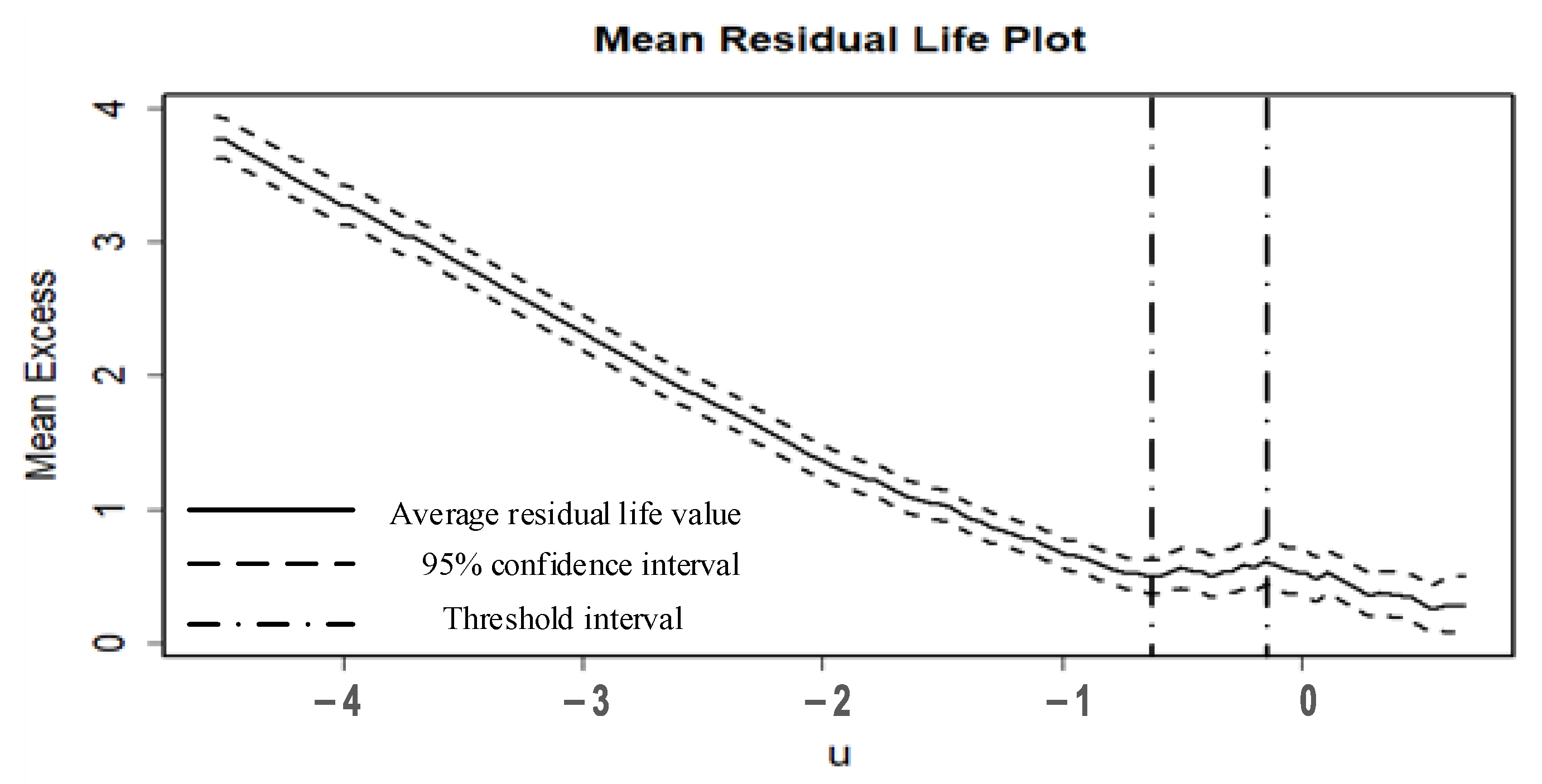
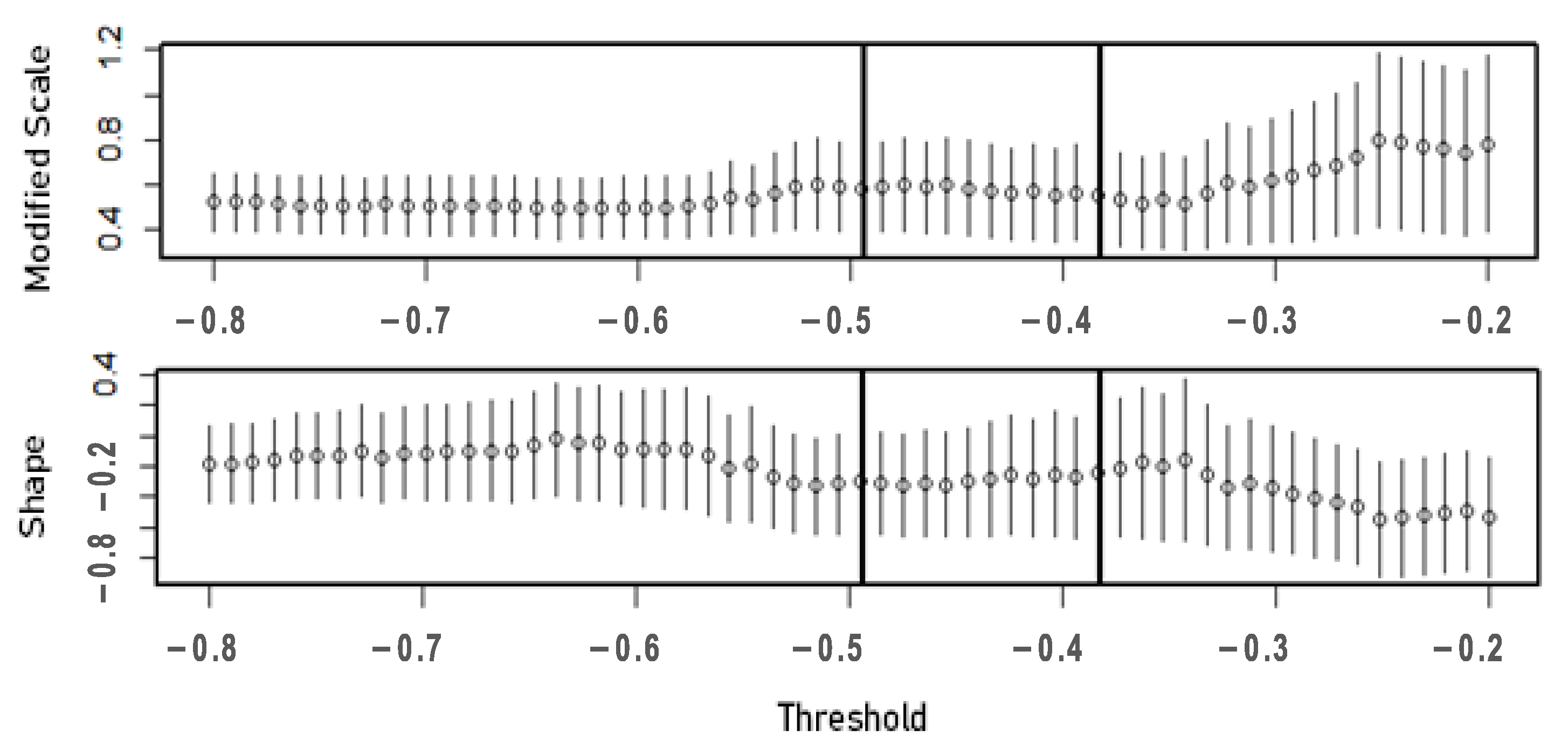
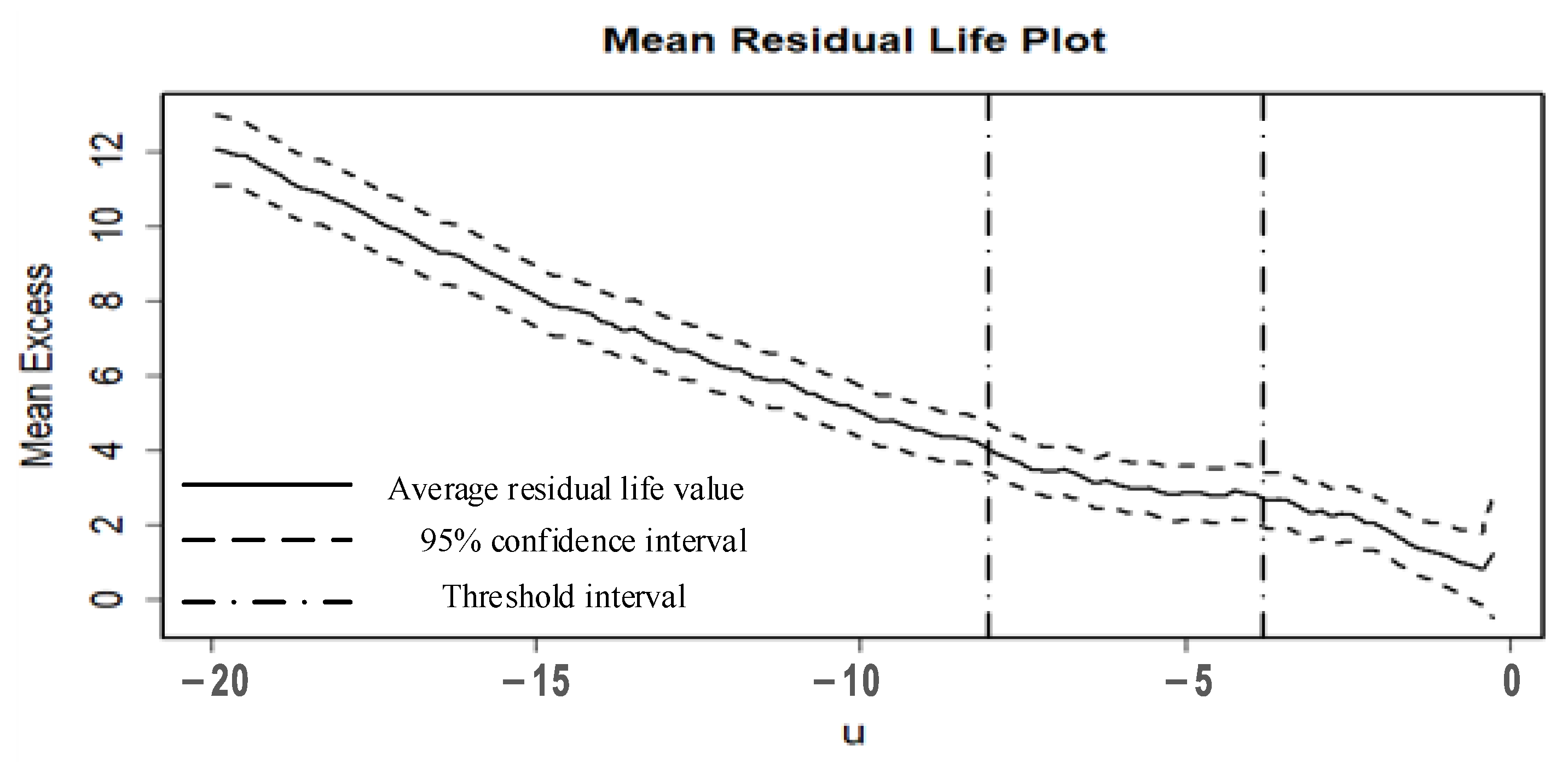
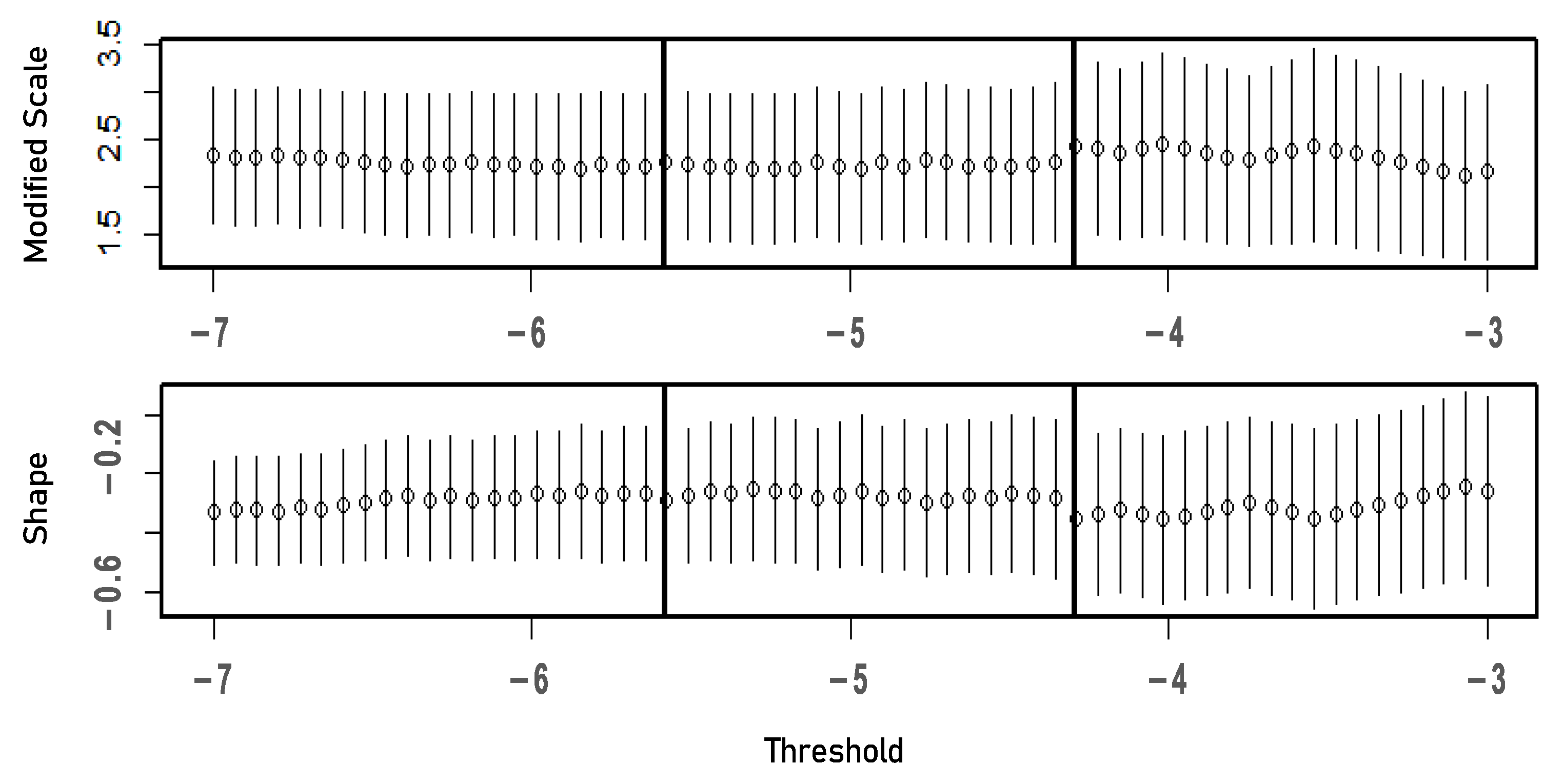
3.1.1. Univariate Extreme Value Theory Model Results
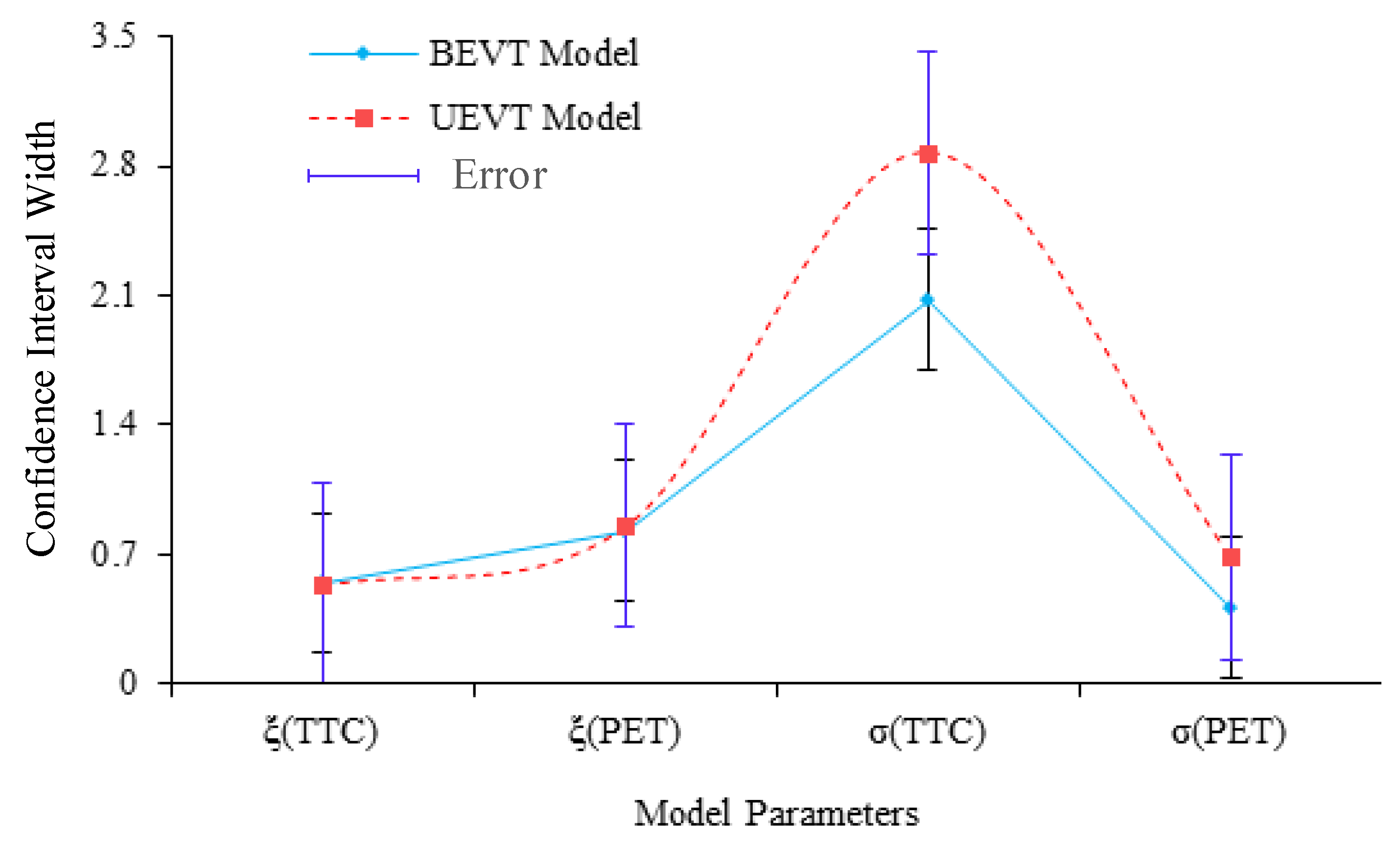
3.1.2. Bivariate Extreme Value Theory Model Results
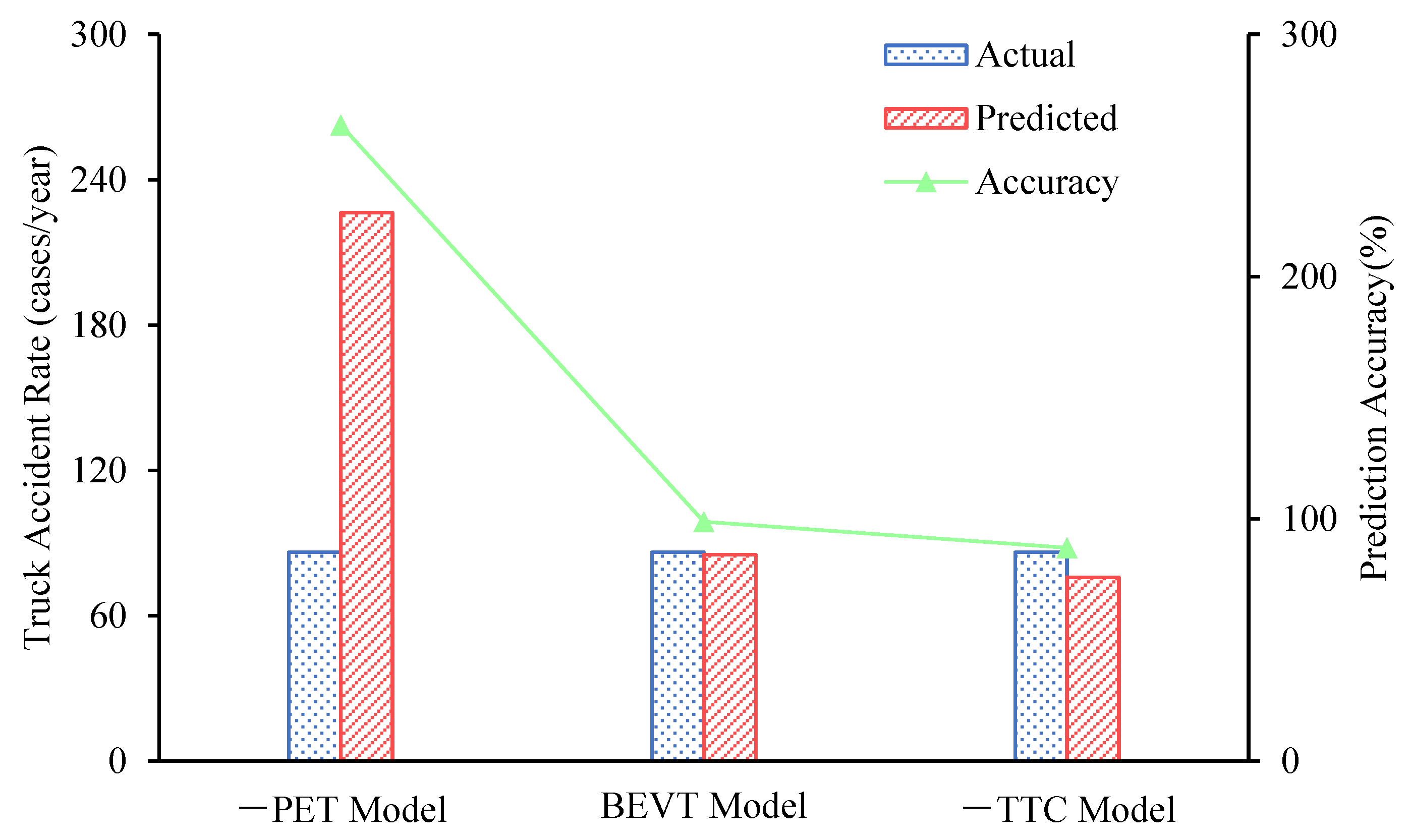
3.1.3. Model Prediction Effect Comparison
3.2. Truck Crash Risk Identification Results
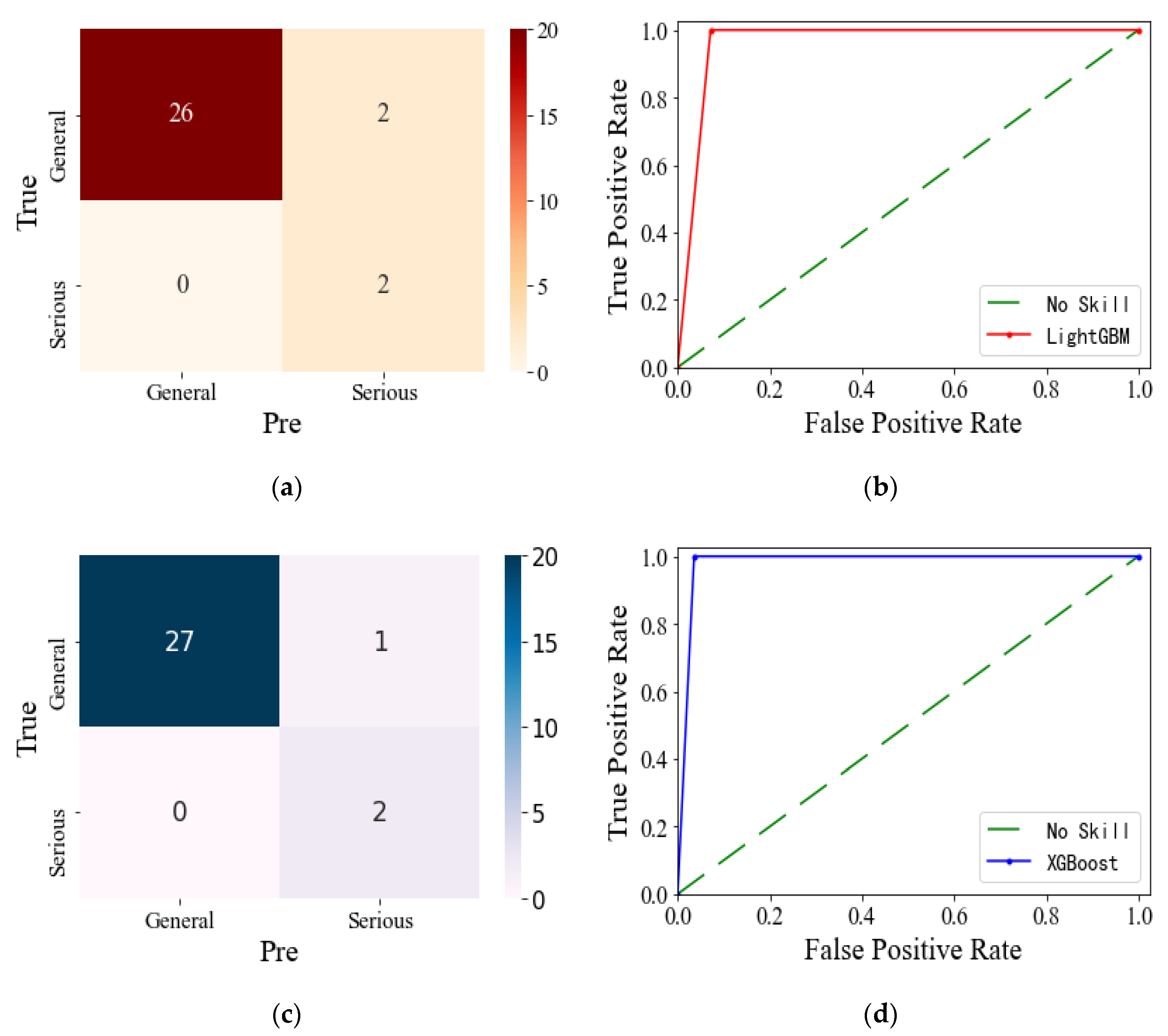
3.2.1. LightGBM Identification Effect
3.2.2. Ranking of Feature Variables
3.3. High-Risk Scene Identification
3.3.1. Identification of High-Risk Horizontal Curvature Radius
3.3.2. Identification of High-Risk Driving Behaviors for Truck Drivers
4. Limitations and Future Research
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cafiso, S.; Alessandro, D.G.; Giacomo, D.S.; Grazia, L.C.; Bhagwant, P. Development of comprehensive accident models for two-lane rural highways using exposure, geometry, consistency and context variables. Accid. Anal. Prev. 2010, 42, 1072–1079. [Google Scholar] [CrossRef] [PubMed]
- Xie, S.K.; Ji, X.F.; Yang, W.C.; Fang, R.; Hao, J.J. Exploring risk factors with crash severity on china two-lane rural roads using a random-parameter ordered probit model. J. Adv. Transp. 2020, 2020, 8870497. [Google Scholar] [CrossRef]
- Champahom, T.; Jomnonkwao, S.; Watthanaklang, D.; Karoonsoontawong, A.; Chatpattananan, V.; Ratanavaraha, V. Applying hierarchical logistic models to compare urban and rural roadway modeling of severity of rear-end vehicular crashes. Accid. Anal. Prev. 2020, 141, 105537. [Google Scholar] [CrossRef]
- Se, C.; Champahom, T.; Jomnonkwao, S.; Chaimuang, P.; Ratanavaraha, V. Empirical comparison of the effects of urban and rural crashes on motorcyclist injury severities: A correlated random parameters ordered probit approach with heterogeneity in means. Accid. Anal. Prev. 2021, 161, 106352. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Zhang, G.; Tarefder, R.; Ma, J.; Wei, H.; Guan, H. A multinomial logit model-bayesian network hybrid approach for driver injury severity analyses in rear-end crashes. Accid. Anal. Prev. 2015, 80, 76–88. [Google Scholar] [CrossRef]
- Wang, L.J.; Ning, P.S.; Yin, P.; Cheng, P.X.; Schwebel, D.C.; Liu, J.M.; Wu, Y.; Liu, Y.N.; Qi, J.L.; Zeng, X.Y. Road traffic mortality in china: Analysis of national surveillance data from 2006 to 2016. Lancet Public Health 2019, 4, e245–e255. [Google Scholar] [CrossRef]
- Al-Bdairi, N.S.S.; Hernandez, S. Comparison of contributing factors for injury severity of large truck drivers in run-off-road crashes on rural and urban roadways: Accounting for unobserved heterogeneity. Int. J. Transp. Sci. Technol. 2020, 9, 116–127. [Google Scholar] [CrossRef]
- Yuda, E.; Konishi, K.; Takahashi, M. Evaluation of physiological and psychological stress in head driver leading self-driving truck. J. Ind. Manag. Optim. 2021, ISASE2021, 1–2. [Google Scholar] [CrossRef]
- Meng, F.; Sze, N.N.; Song, C.; Chen, T.; Zeng, Y. Temporal instability of truck volume composition on non-truck-involved crash severity using uncorrelated and correlated grouped random parameters binary logit models with space-time variations. Anal. Methods Accid. Res. 2021, 31, 100168. [Google Scholar] [CrossRef]
- Xu, J.L.; Xin, T.A.; Gao, C.; Sun, Z.H. Study on the maximum safe instantaneous input of the steering wheel against rollover for trucks on horizontal curves. Int. J. Environ. Res. Public Health 2022, 19, 2025. [Google Scholar] [CrossRef] [PubMed]
- Baikejuli, M.; Shi, J.; Hussain, M. A study on the probabilistic quantification of heavy-truck crash risk under the influence of multi-factors. Accid. Anal. Prev. 2022, 174, 106771. [Google Scholar] [CrossRef] [PubMed]
- Yuan, Y.L.; Yang, M.; Guo, Y.Y.; Rasouli, S.; Gan, Z.X.; Ren, Y.F. Risk factors associated with truck-involved fatal crash severity: Analyzing their impact for different groups of truck drivers. J. Saf. Res. 2021, 76, 154–165. [Google Scholar] [CrossRef]
- Friswell, R.; Williamson, A. Management of heavy truck driver queuing and waiting for loading and unloading at road transport customers’ depots. Saf. Sci. 2019, 120, 194–205. [Google Scholar] [CrossRef]
- Wang, C.Z.; Chen, F.; Zhang, Y.L.; Cheng, J.C. Spatiotemporal instability analysis of injury severities in truck-involved and non-truck-involved crashes. Anal. Methods Accid. Res. 2022, 34, 100214. [Google Scholar] [CrossRef]
- Hyun, K.; Jeong, K.; Tok, A.; Ritchie, S.G. Assessing crash risk considering vehicle interactions with trucks using point detector data. Accid. Anal. Prev. 2019, 130, 75–83. [Google Scholar] [CrossRef]
- Shah, D.; Lee, C. Analysis of effects of driver’s evasive action time on rear-end collision risk using a driving simulator. J. Saf. Res. 2021, 78, 242–250. [Google Scholar] [CrossRef] [PubMed]
- Davis, G.A.; Hourdos, J.; Xiong, H.; Chatterjee, I. Outline for a causal model of traffic conflicts and crashes. Accid. Anal. Prev. 2011, 43, 1907–1919. [Google Scholar] [CrossRef]
- Charly, A.; Mathew, T.V. Estimation of traffic conflicts using precise lateral position and width of vehicles for safety assessment. Accid. Anal. Prev. 2019, 132, 105264. [Google Scholar] [CrossRef]
- Hu, Y.P.; Li, Y.; Huang, H.L.; Lee, J.; Yuan, C.; Zou, G.Q. A high-resolution trajectory data driven method for real-time evaluation of traffic safety. Accid. Anal. Prev. 2022, 165, 106503. [Google Scholar] [CrossRef] [PubMed]
- Yu, R.J.; Han, L.; Zhang, H. Trajectory data based freeway high-risk events prediction and its influencing factors analyses. Accid. Anal. Prev. 2021, 154, 106085. [Google Scholar] [CrossRef] [PubMed]
- Goyani, J.; Paul Aninda, B.; Gore, N.; Arkatkar, S.; Joshi, G. Investigation of crossing conflicts by vehicle type at unsignalized t-intersections under varying roadway and traffic conditions in India. J. Transp. Eng. A Syst. 2021, 147, 05020011. [Google Scholar] [CrossRef]
- Zheng, L.; Sayed, T.; Tageldin, A. Before-after safety analysis using extreme value theory: A case of left-turn bay extension. Accid. Anal. Prev. 2018, 121, 258–267. [Google Scholar] [CrossRef] [PubMed]
- Yuan, Z.Z.; He, K.; Yang, Y. A roadway safety sustainable approach: Modeling for real-time traffic crash with limited data and its reliability verification. J. Adv. Transp. 2022, 2022, 1570521. [Google Scholar] [CrossRef]
- Zheng, Q.K.; Xu, C.C.; Liu, P.; Wang, Y.X. Investigating the predictability of crashes on different freeway segments using the real-time crash risk models. Accid. Anal. Prev. 2021, 159, 106213. [Google Scholar] [CrossRef]
- Guo, M.; Zhao, X.H.; Yao, Y.; Yan, P.W.; Su, Y.L.; Bi, C.F.; Wu, D.Y. A study of freeway crash risk prediction and interpretation based on risky driving behavior and traffic flow data. Accid. Anal. Prev. 2021, 160, 106328. [Google Scholar] [CrossRef]
- Orsini, F.; Gecchele, G.; Rossi, R.; Gastaldi, M. A conflict-based approach for real-time road safety analysis: Comparative evaluation with crash-based models. Accid. Anal. Prev. 2021, 161, 106382. [Google Scholar] [CrossRef]
- Haule, H.J.; Ali, M.D.S.; Alluri, P.; Sando, T. Evaluating the effect of ramp metering on freeway safety using real-time traffic data. Accid. Anal. Prev. 2021, 157, 106181. [Google Scholar] [CrossRef] [PubMed]
- Haghighi, N.; Liu, X.C.; Zhang, G.H.; Porter, R.J. Impact of roadway geometric features on crash severity on rural two-lane highways. Accid. Anal. Prev. 2018, 111, 34–42. [Google Scholar] [CrossRef]
- Liu, M.M.; Chen, Y.S. Predicting real-time crash risk for urban expressways in china. Math. Probl. Eng. 2017, 2017, 6263726. [Google Scholar] [CrossRef]
- Ampadu, V.; Alrejjal, A.; Ksaibati, K. Incorporating horizontal curves and roadway geometry into the automated updated grade severity rating system. Transp. Res. Rec. 2022, 2676, 329–343. [Google Scholar] [CrossRef]
- Alrejjal, A.; Ksaibati, K. Impact of mountainous interstate alignments and truck configurations on rollover propensity. J. Saf. Res. 2022, 80, 160–174. [Google Scholar] [CrossRef] [PubMed]
- Al-Bdairi, N.S.S.; Behnood, A. Assessment of temporal stability in risk factors of crashes at horizontal curves on rural two-lane undivided highways. J. Saf. Res. 2021, 76, 205–217. [Google Scholar] [CrossRef] [PubMed]
- Arbabzadeh, N.; Jafari, M. A data-driven approach for driving safety risk prediction using driver behavior and roadway information data. IEEE Trans. Intell. Transp. Syst. 2017, 19, 446–460. [Google Scholar] [CrossRef]
- Yuksel, A.S.; Atmaca, S. Driver’s black box: A system for driver risk assessment using machine learning and fuzzy logic. J. Intell. Transp. Syst. 2021, 25, 482–500. [Google Scholar] [CrossRef]
- Parsa, A.B.; Movahedi, A.; Taghipour, H.; Derrible, S.; Mohammadian, A. Toward safer highways, application of xgboost and shap for real-time accident detection and feature analysis. Accid. Anal. Prev. 2020, 136, 105405. [Google Scholar] [CrossRef]
- Parsa, A.B.; Taghipour, H.; Derrible, S.; Mohammadian, A. Real-time accident detection: Coping with imbalanced data. Accid. Anal. Prev. 2019, 129, 202–210. [Google Scholar] [CrossRef] [PubMed]
- Dong, C.J.; Dong, Q.; Huang, B.S.; Hu, W.; Nambisan, S. Estimating factors contributing to frequency and severity of large truck–involved crashes. J. Transp. Eng. A Syst. 2017, 143, 04017032. [Google Scholar] [CrossRef]
- Alozi, A.R.; Hussein, M. Evaluating the safety of autonomous vehicle–pedestrian interactions: An extreme value theory approach. Anal. Methods Accid. Res. 2022, 35, 100230. [Google Scholar] [CrossRef]
- Chan, S.; Chu, J.; Zhang, Y.Y.; Nadarajah, S. An extreme value analysis of the tail relationships between returns and volumes for high frequency cryptocurrencies. Res. Int. Bus. Financ. 2022, 59, 101541. [Google Scholar] [CrossRef]
- Vieira, S.; Migliavacca, D.; Quevedo, D. Analysis of hydrological extremes in the guaíba hydrographic region: An application of extreme values theory. Braz. J. Environ. Sci. 2022, 57, 239–255. [Google Scholar] [CrossRef]
- Stopka, K.S.; Yaghoobi, M.; Allison, J.E.; McDowell, D.L. Simulated effects of sample size and grain neighborhood on the modeling of extreme value fatigue response. Acta Mater. 2022, 224, 117524. [Google Scholar] [CrossRef]
- Songchitruksa, P.; Tarko, A.P. The extreme value theory approach to safety estimation. Accid. Anal. Prev. 2006, 38, 811–822. [Google Scholar] [CrossRef]
- Ali, Y.; Haque, M.M.; Zheng, Z.D. An extreme value theory approach to estimate crash risk during mandatory lane-changing in a connected environment. Anal. Methods Accid. Res. 2022, 33, 100193. [Google Scholar] [CrossRef]
- Zheng, L.; Sayed, T.; Essa, M. Bayesian hierarchical modeling of the non-stationary traffic conflict extremes for crash estimation. Anal. Methods Accid. Res. 2019, 23, 100100. [Google Scholar] [CrossRef]
- Jonasson, J.K.; Rootzén, H. Internal validation of near-crashes in naturalistic driving studies: A continuous and multivariate approach. Accid. Anal. Prev. 2014, 62, 102–109. [Google Scholar] [CrossRef] [PubMed]
- Zheng, L.; Ismail, K.; Sayed, T.; Fatema, T. Bivariate extreme value modeling for road safety estimation. Accid. Anal. Prev. 2018, 120, 83–91. [Google Scholar] [CrossRef]
- Zheng, L.; Sayed, T. From univariate to bivariate extreme value models: Approaches to integrate traffic conflict indicators for crash estimation. Transp. Res. Part C Emerg. Technol. 2019, 103, 211–225. [Google Scholar] [CrossRef]
- Arun, A.; Haque, M.M.; Bhaskar, A.; Washington, S.; Sayed, T. A bivariate extreme value model for estimating crash frequency by severity using traffic conflicts. Anal. Methods Accid. Res. 2021, 32, 100180. [Google Scholar] [CrossRef]
- Cavadas, J.; Azevedo, C.L.; Farah, H.; Ferreira, A. Road safety of passing maneuvers: A bivariate extreme value theory approach under non-stationary conditions. Accid. Anal. Prev. 2020, 134, 105315. [Google Scholar] [CrossRef] [PubMed]
- Zheng, L.; Sayed, T.; Essa, M. Validating the bivariate extreme value modeling approach for road safety estimation with different traffic conflict indicators. Accid. Anal. Prev. 2019, 123, 314–323. [Google Scholar] [CrossRef]
- Man, C.K.; Quddus, M.; Theofilatos, A. Transfer learning for spatio-temporal transferability of real-time crash prediction models. Accid. Anal. Prev. 2022, 165, 106511. [Google Scholar] [CrossRef]
- Yang, Y.; He, K.; Wang, Y.P.; Yuan, Z.Z.; Yin, Y.H.; Guo, M.Z. Identification of dynamic traffic crash risk for cross-area freeways based on statistical and machine learning methods. Phys. A 2022, 595, 127083. [Google Scholar] [CrossRef]
- Leonard, S.; Woehrle, T.; Nikizad, H.; Vearrier, J.; Odean, M.; Renier, C.; Bollins, J.; Eyer, S. Blunt traumatic brachial plexus injuries in a northern rural us setting: Increased likelihood in unshielded motor-powered crashes. Trauma Surg. Acute Care Open 2020, 5, e000558. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.H.; Fu, T.; Xue, J.T.; Li, C.M.; Song, H.; Xu, W.X.; Shangguan, Q.Q. Realtime wide-area vehicle trajectory tracking using millimeter-wave radar sensors and the open TJRD TS dataset. Int. J. Transp. Sci. Technol. 2022. [Google Scholar] [CrossRef]
- Khoda Bakhshi, A.; Ahmed, M.M. Driving simulator trajectory-level analysis of truck drivers’ behavioral alteration in connected vehicles environment under fog with complex roadway geometry. Transp. Res. Rec. 2022, 2676, 435–451. [Google Scholar] [CrossRef]
- Shen, J.J.; Yang, G.C. Crash risk assessment for heterogeneity traffic and different vehicle-following patterns using microscopic traffic flow data. Sustainability. 2020, 12, 9888. [Google Scholar] [CrossRef]
- Hou, Q.Z.; Huo, X.Y.; Leng, J.Q. A correlated random parameters tobit model to analyze the safety effects and temporal instability of factors affecting crash rates. Accid. Anal. Prev. 2020, 134, 105326. [Google Scholar] [CrossRef]
- Li, Y.S.; Lu, J.; Xu, K.S. Crash risk prediction model of lane-change behavior on approaching intersections. Discret. Dyn. Nat. Soc. 2017, 2017, 7328562. [Google Scholar] [CrossRef]
- Alsharkawi, A.; Al-Fetyani, M.; Dawas, M.; Saadeh, H.; Alyaman, M. Poverty classification using machine learning: The case of jordan. Sustainability 2021, 13, 1412. [Google Scholar] [CrossRef]
- Gabauer, D.J.; Li, X.L. Influence of horizontally curved roadway section characteristics on motorcycle-to-barrier crash frequency. Accid. Anal. Prev. 2015, 77, 105–112. [Google Scholar] [CrossRef] [PubMed]
- Job, R.F.S. Evaluations of speed camera interventions can deliver a wide range of outcomes: Causes and policy implications. Sustainability 2022, 14, 1765. [Google Scholar] [CrossRef]
- Wilson, C.; Willis, C.; Hendrikz, J.; Le Brocque, R.; Bellamy, N. Speed cameras for the prevention of road traffic injuries and deaths. Cochrane Database Syst. Rev. 2010, 11, CD004607. [Google Scholar] [CrossRef]
- Zhao, H.T.; Zhang, C.S. An online-learning-based evolutionary many-objective algorithm. Inf. Sci. 2020, 509, 1–21. [Google Scholar] [CrossRef]
- Pasha, J.; Dulebenets, M.A.; Fathollahi-Fard, A.M.; Tian, G.; Lau, Y.-y.; Singh, P.; Liang, B. An integrated optimization method for tactical-level planning in liner shipping with heterogeneous ship fleet and environmental considerations. Adv. Eng. Inform. 2021, 48, 101299. [Google Scholar] [CrossRef]
- Kavoosi, M.; Dulebenets, M.A.; Abioye, O.F.; Pasha, J.; Wang, H.; Chi, H. An augmented self-adaptive parameter control in evolutionary computation: A case study for the berth scheduling problem. Adv. Eng. Inform. 2019, 42, 100972. [Google Scholar] [CrossRef]
- Dulebenets, M. A comprehensive evaluation of weak and strong mutation mechanisms in evolutionary algorithms for truck scheduling at cross-docking terminals. IEEE Access 2018, 6, 65635–65650. [Google Scholar] [CrossRef]
- Reilly, D.; Taylor, M.; Fergus, P.; Chalmers, C.; Thompson, S. The categorical data conundrum: Heuristics for classification problems—A case study on domestic fire injuries. IEEE Access 2022, 10, 70113–70125. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Road Section 1 | Road Section 2 | Road Section 3 |
|---|---|---|---|
| Turn angle | 74°44′01.3″ | 33°36′52″ | 59°30′54.7″ |
| Radius of curve/(m) | 272 | 500 | 227 |
| Spiral curve parameter/(m) | 165 | 200 | 125 |
| Spiral curve length/(m) | 100 | 80 | 70 |
| Curve length/(m) | 455 | 373 | 312 |
| Type | Name | Symbols | Units | Description |
|---|---|---|---|---|
| Traffic flow environment | Average time headway [51] | s | The average time headway between vehicles in 5 min before the conflict | |
| Average speed [25] | Km/h | The average speed of vehicles in 5 min before the conflict | ||
| Traffic flow density [52] | Vehicles/m | The traffic flow density in 5 min before the conflict | ||
| Trucks ratio [19] | % | Percentage of truck traffic to total traffic in 5 min before the conflict | ||
| Unprotected vehicles ratio [53] | % | Traffic of unprotected vehicles as a percentage of total traffic in 5 min before the conflict | ||
| Lateral offset [54] | m | Lateral deflection of conflict vehicle at conflict moment | ||
| Distance between two vehicles [20] | m | Distance of truck and conflict vehicle at conflict moment | ||
| Driver factor | Driving behavior risk [55] | - | Integrated assessment of truck driver’s traffic risk in terms of speed and space | |
| Truck factor | Truck length [56] | m | The truck’s entire length | |
| Road alignment | Longitudinal slope [57] | ° | Longitudinal slope in the study section | |
| Horizontal curve radius [32] | m | Horizontal curve radius in the study section |
| Parameter | Threshold(s) | Estimation Value | Standard Variance | 95% Confidence Interval | |||
|---|---|---|---|---|---|---|---|
| –PET | −0.382 | 0.642 | −0.241 | 0.174 | 0.218 | (0.300, 0.984) | (−0.669, 0.187) |
| –TTC | −4.471 | 3.361 | −0.261 | 0.732 | 0.135 | (1.926, 4.797) | (−0.527, 0.004) |
| Style | Parameters | Value (Standard Variance) |
|---|---|---|
| Threshold(s) | –PET | −0.382 |
| –TTC | −4.471 | |
| Exceeding(cases) | –PET | 36 |
| –TTC | 32 | |
| Join * | 25 | |
| Estimation value | 0.415 (0.105) | |
| 0.182 (0.211) | ||
| 2.585 (0.530) | ||
| −0.039 (0.139) | ||
| 95% confidence interval | (0.209, 0.621) | |
| (−0.232, 0.600) | ||
| (1.546, 3.624) | ||
| (−0.311, 0.233) |
| Index | LightGBM Model | XGBoost Model |
|---|---|---|
| AUC | 0.964 | 0.982 |
| Accuracy | 93.333% | 96.667% |
| Recall | 100.000% | 100.000% |
| False-Alarm Rate | 3.571% | 1.786% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Geng, Z.; Ji, X.; Cao, R.; Lu, M.; Qin, W. A Conflict Measures-Based Extreme Value Theory Approach to Predicting Truck Collisions and Identifying High-Risk Scenes on Two-Lane Rural Highways. Sustainability 2022, 14, 11212. https://doi.org/10.3390/su141811212
Geng Z, Ji X, Cao R, Lu M, Qin W. A Conflict Measures-Based Extreme Value Theory Approach to Predicting Truck Collisions and Identifying High-Risk Scenes on Two-Lane Rural Highways. Sustainability. 2022; 14(18):11212. https://doi.org/10.3390/su141811212
Chicago/Turabian StyleGeng, Zhaoshi, Xiaofeng Ji, Rui Cao, Mengyuan Lu, and Wenwen Qin. 2022. "A Conflict Measures-Based Extreme Value Theory Approach to Predicting Truck Collisions and Identifying High-Risk Scenes on Two-Lane Rural Highways" Sustainability 14, no. 18: 11212. https://doi.org/10.3390/su141811212
APA StyleGeng, Z., Ji, X., Cao, R., Lu, M., & Qin, W. (2022). A Conflict Measures-Based Extreme Value Theory Approach to Predicting Truck Collisions and Identifying High-Risk Scenes on Two-Lane Rural Highways. Sustainability, 14(18), 11212. https://doi.org/10.3390/su141811212