
Receding-Horizon Prediction of Vehicle Velocity Profile Using Deterministic and Stochastic Deep Neural Network Models



Abstract
:1. Introduction
1.1. Literature Review
1.2. Problem Statement
1.3. Research Aim and Contributions
2. Description of the Recorded Dataset
2.1. Recorded Driving Cycles
- Bus garage number;
- Timestamp;
- Bus geographical coordinates;
- Bus longitudinal velocity;
- Cumulative distance travelled (from odometer).
- (1)
- The driving cycle follows the reference route trajectory, i.e., no detours are acceptable;
- (2)
- The time difference between each pair of consecutive driving cycle samples is equal to the nominal sampling time, i.e., 1 s;
- (3)
- The initial and final velocity of the driving cycle is equal to zero;
- (4)
- The vehicle acceleration values are within the interval of [–3, 3] m/s2;
- (5)
- The total number of numerically undetermined values (NaN) is zero;
- (6)
- The proportion of the dwell time samples to the total number of samples is less than 75%.
2.2. Preparation of Training, Validation, and Test Datasets
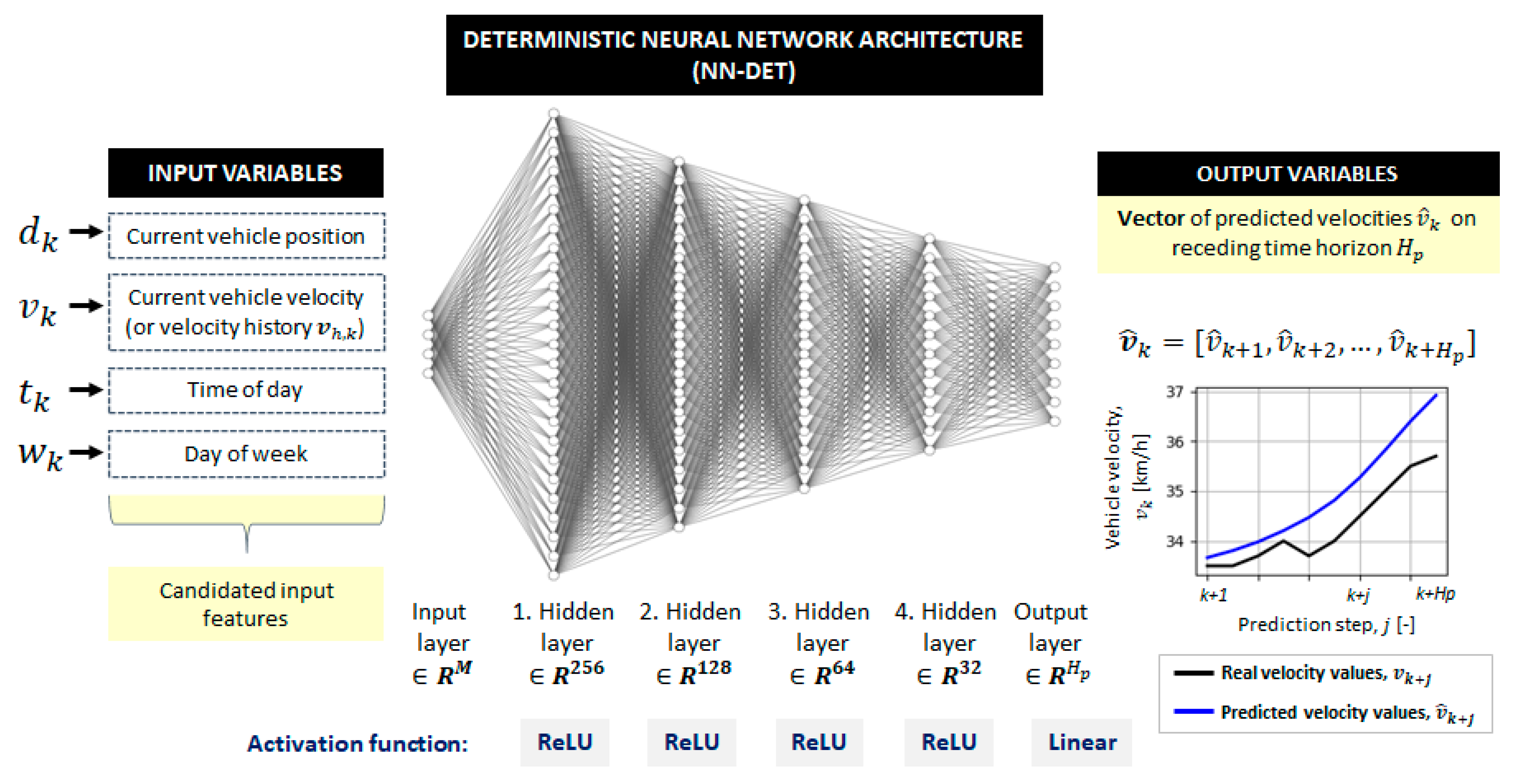
3. Deterministic Vehicle Velocity Prediction Model
3.1. Modelling of Deep Neural Network with Deterministic Output
3.2. Analysis of Deterministic Model Prediction Accuracy
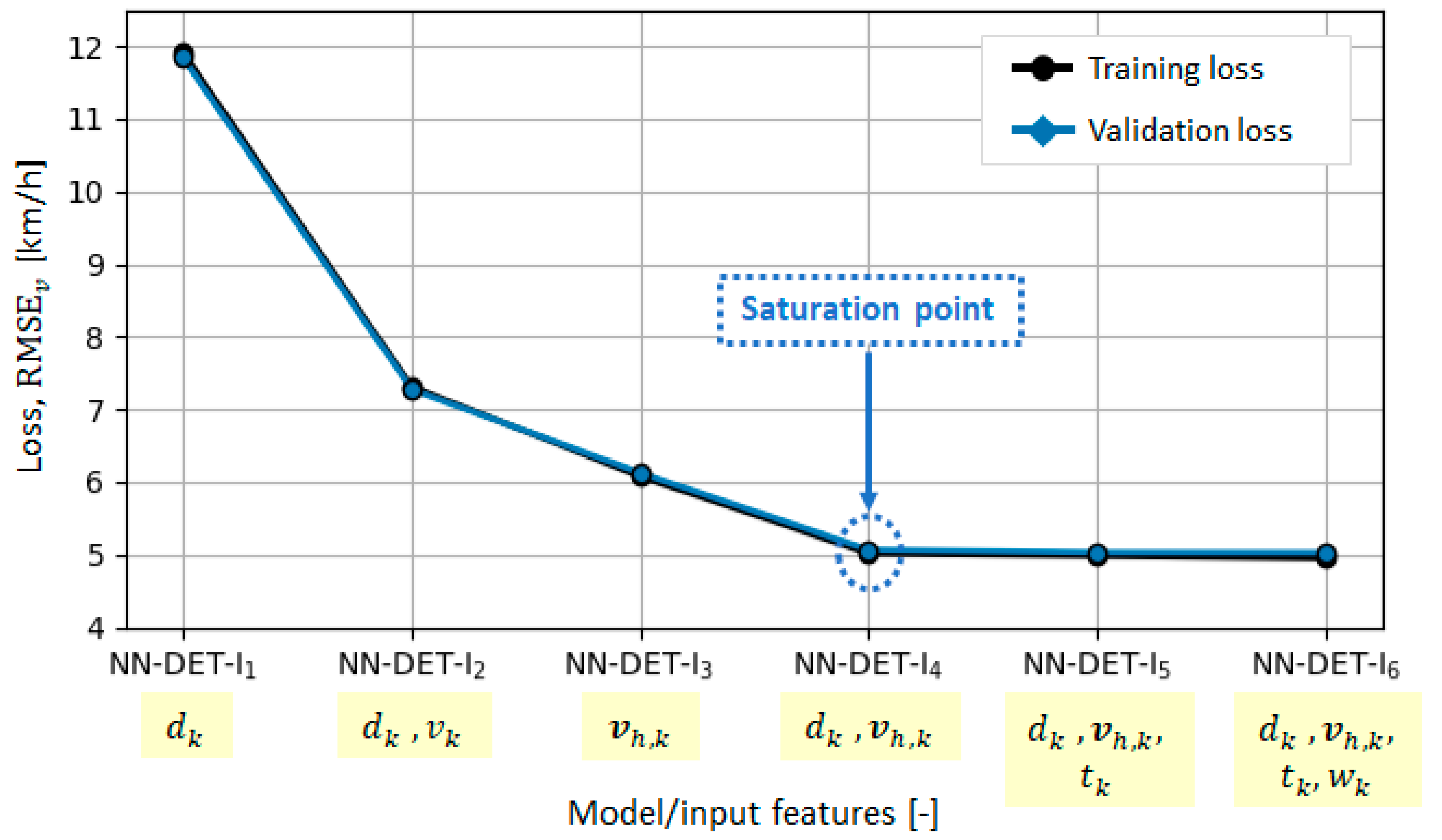
3.2.1. Influence of Input Features
- (1)
- Current vehicle position ;
- (2)
- Current vehicle position and current vehicle velocity ;
- (3)
- Vehicle velocity history ;
- (4)
- Current vehicle position and vehicle velocity history ;
- (5)
- Current vehicle position , vehicle velocity history , and time of day ;
- (6)
- Current vehicle position , vehicle velocity history , time of day , and day of week .
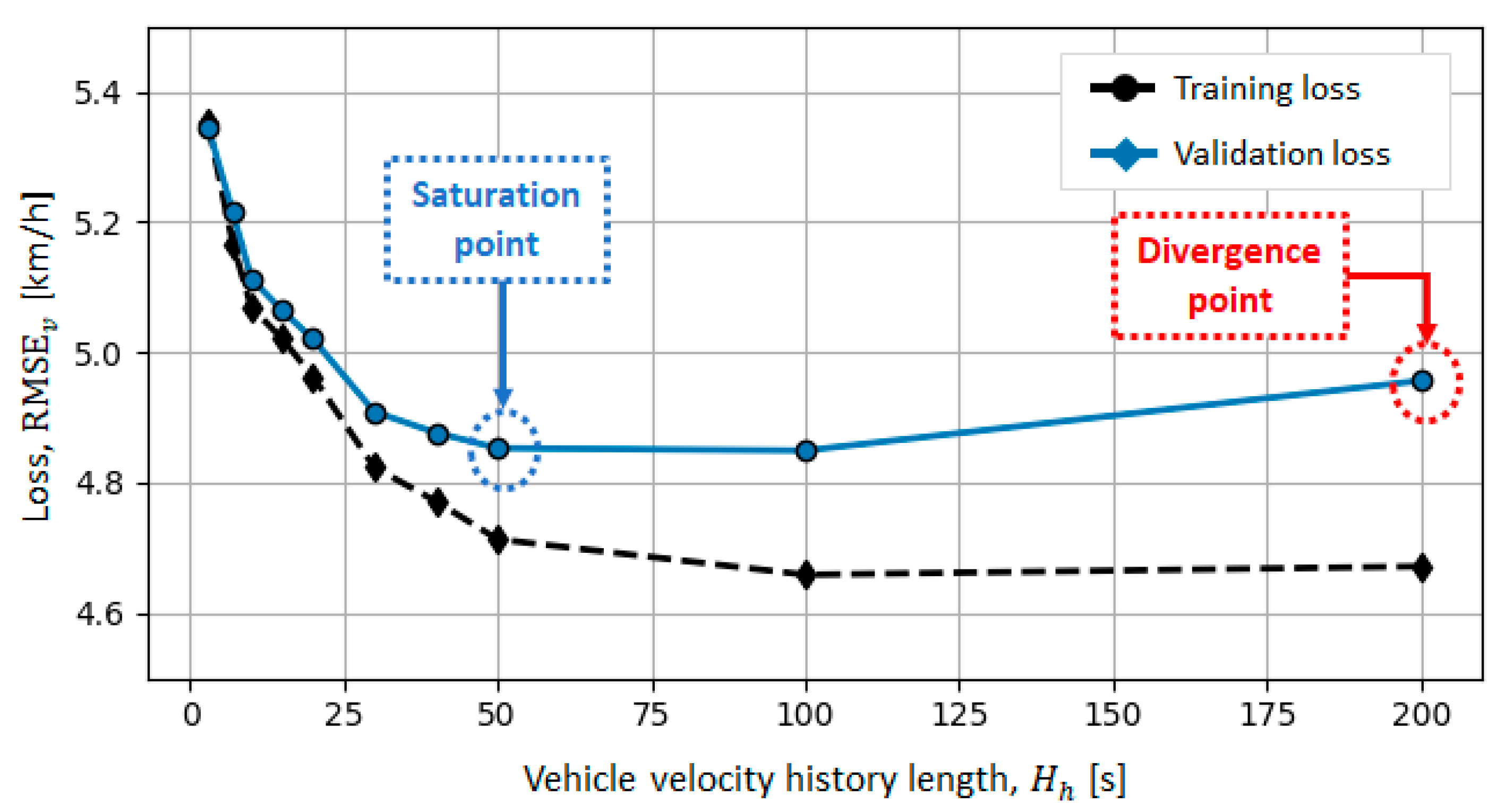
3.2.2. Influence of Vehicle Velocity History Interval Length
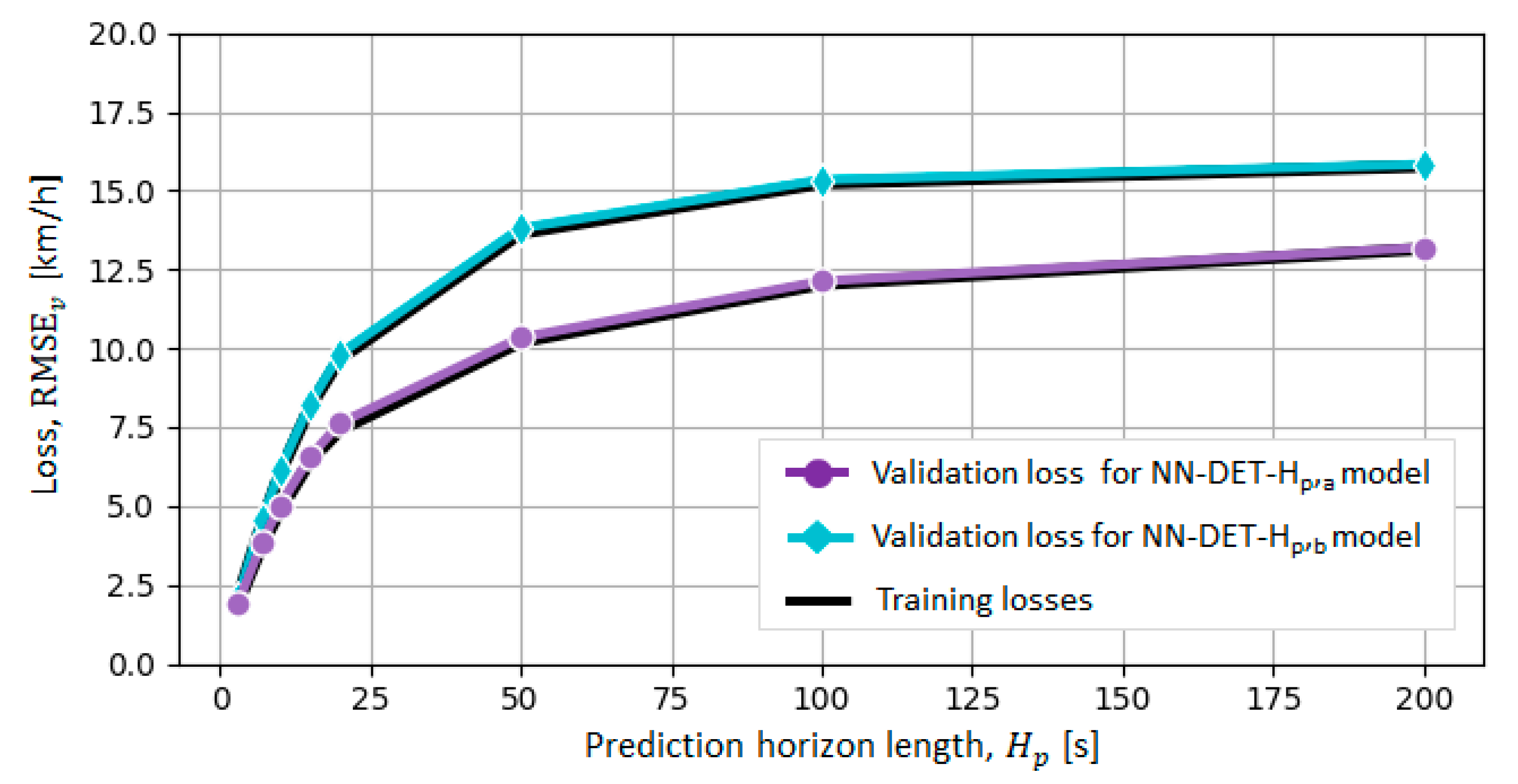
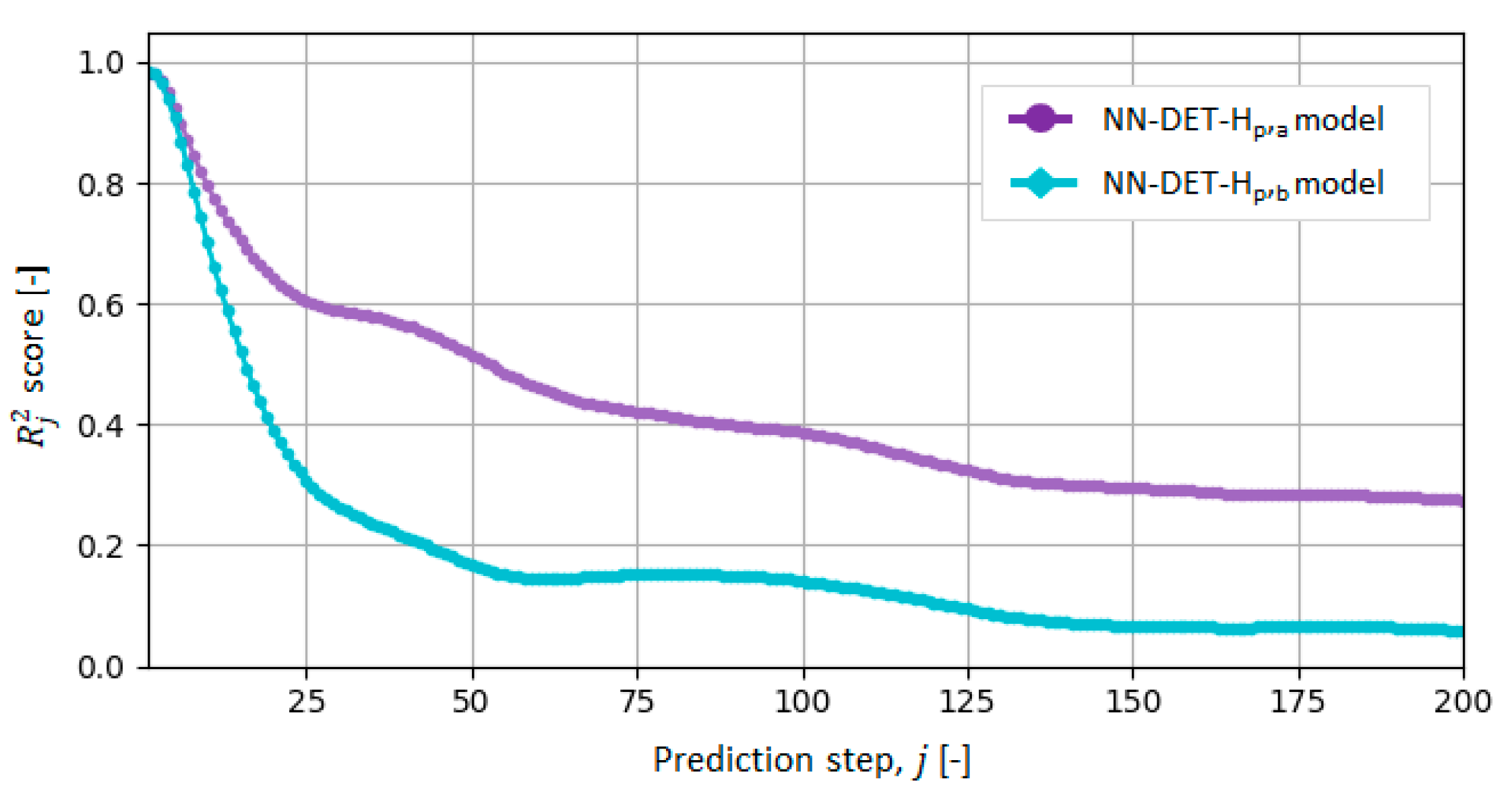
3.2.3. Influence of Vehicle Velocity Prediction Horizon Length
- Full set of candidate features (, , i );
- Vehicle velocity history only (),
- The loss value defined by Equation (2);
- The score value, calculated for each th discrete step of the prediction horizon length :
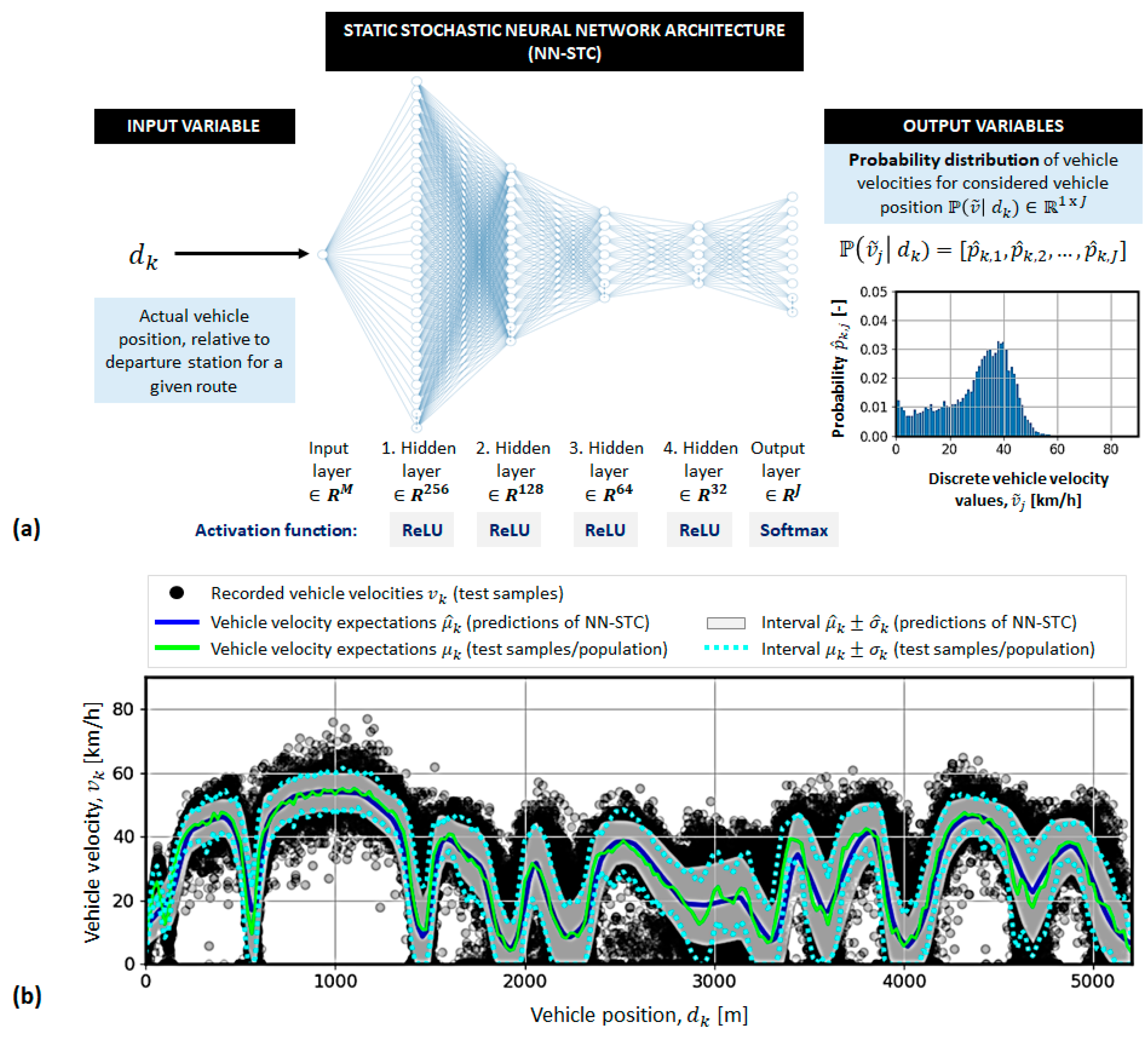
4. Stochastic Vehicle Velocity Prediction Model
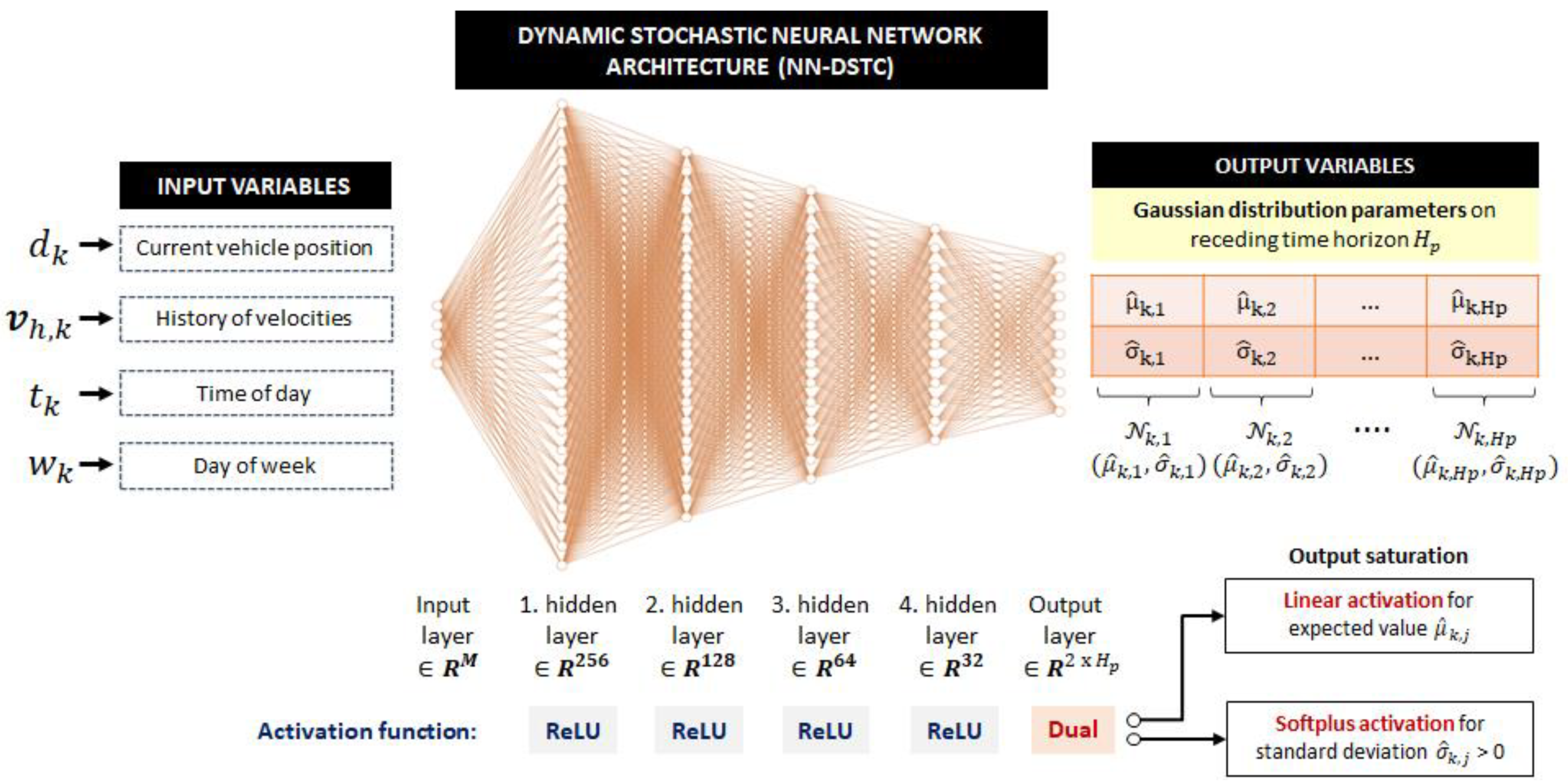
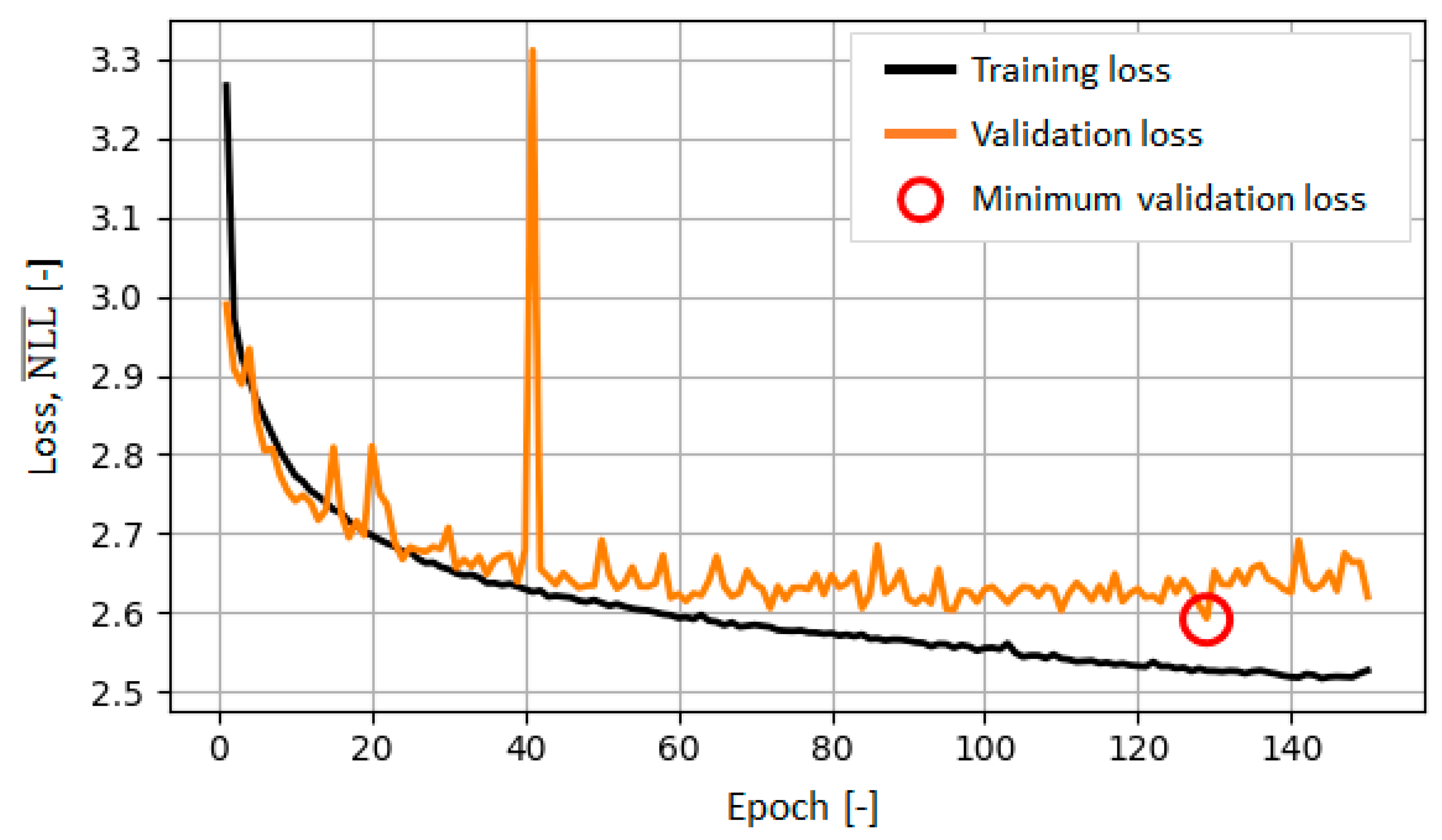
4.1. Modelling of Deep Neural Network with Stochastic Output
4.2. Comparative Analysis of Prediction Accuracies of Stochastic and Deterministic Models
4.2.1. Considered Metrics
- Loss function defined by Equation (2);
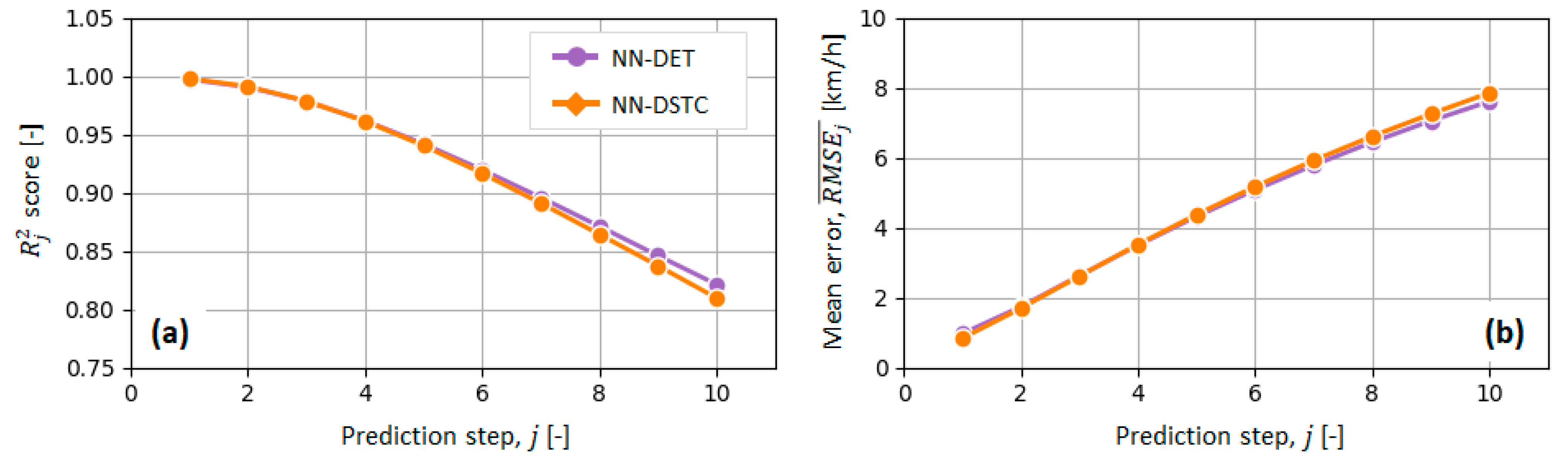
- score defined by Equation (3), calculated for each th discrete step along the prediction horizon (), as applied in Section 3;
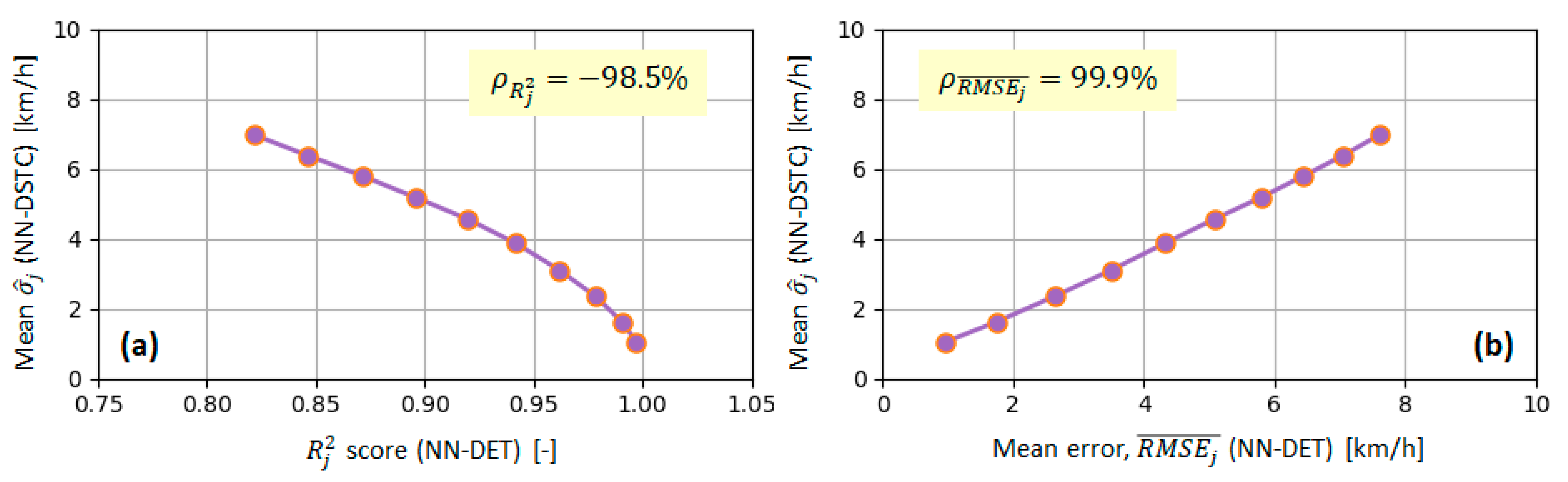
- Mean value of , also calculated for each th discrete step along the prediction horizon:
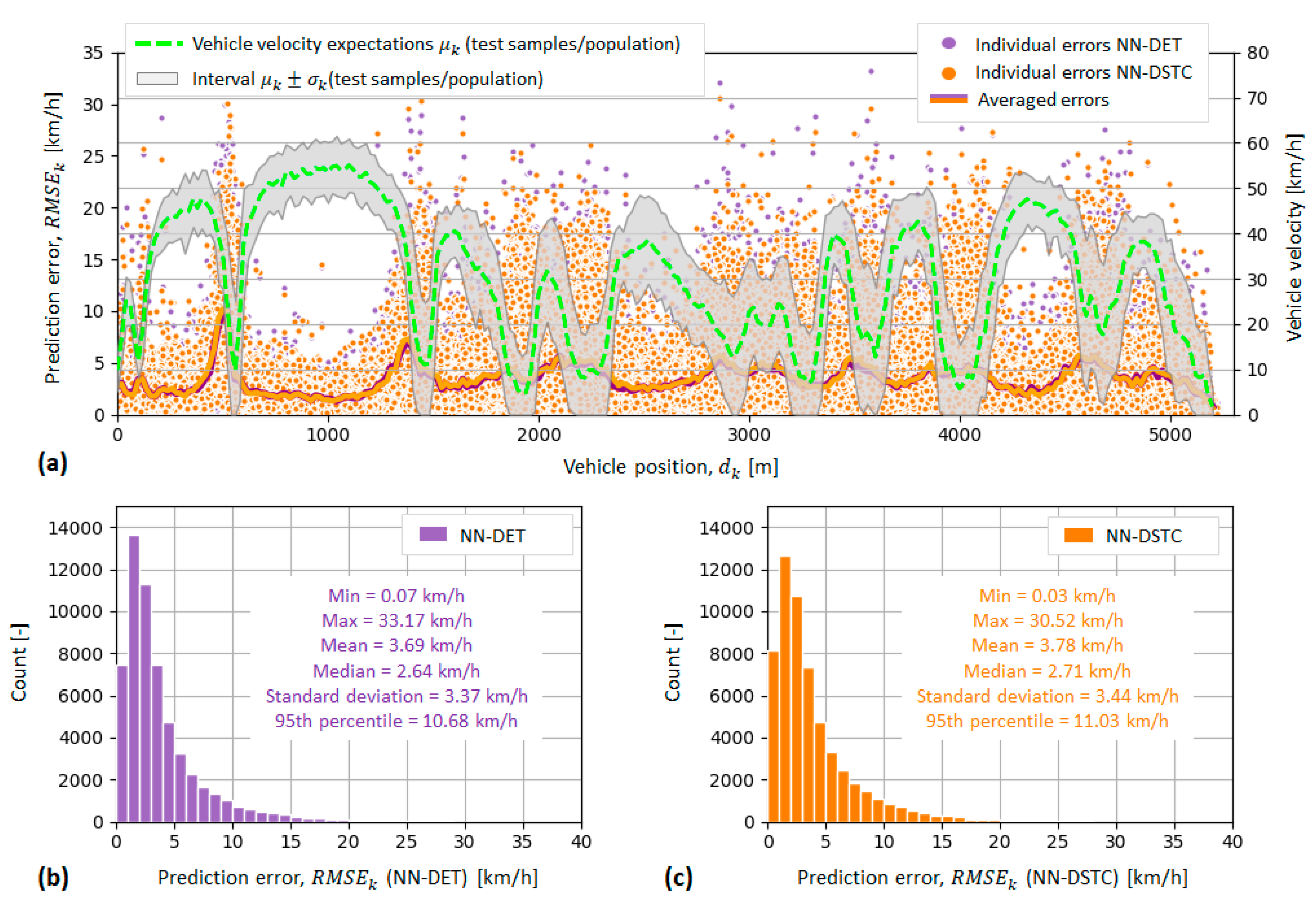
- Mean prediction RMSE along the prediction horizon and for the given time step along the driving cycle:where, in the case of the NN-DSTC model, the predicted velocity expectations are used instead of predicted velocity .
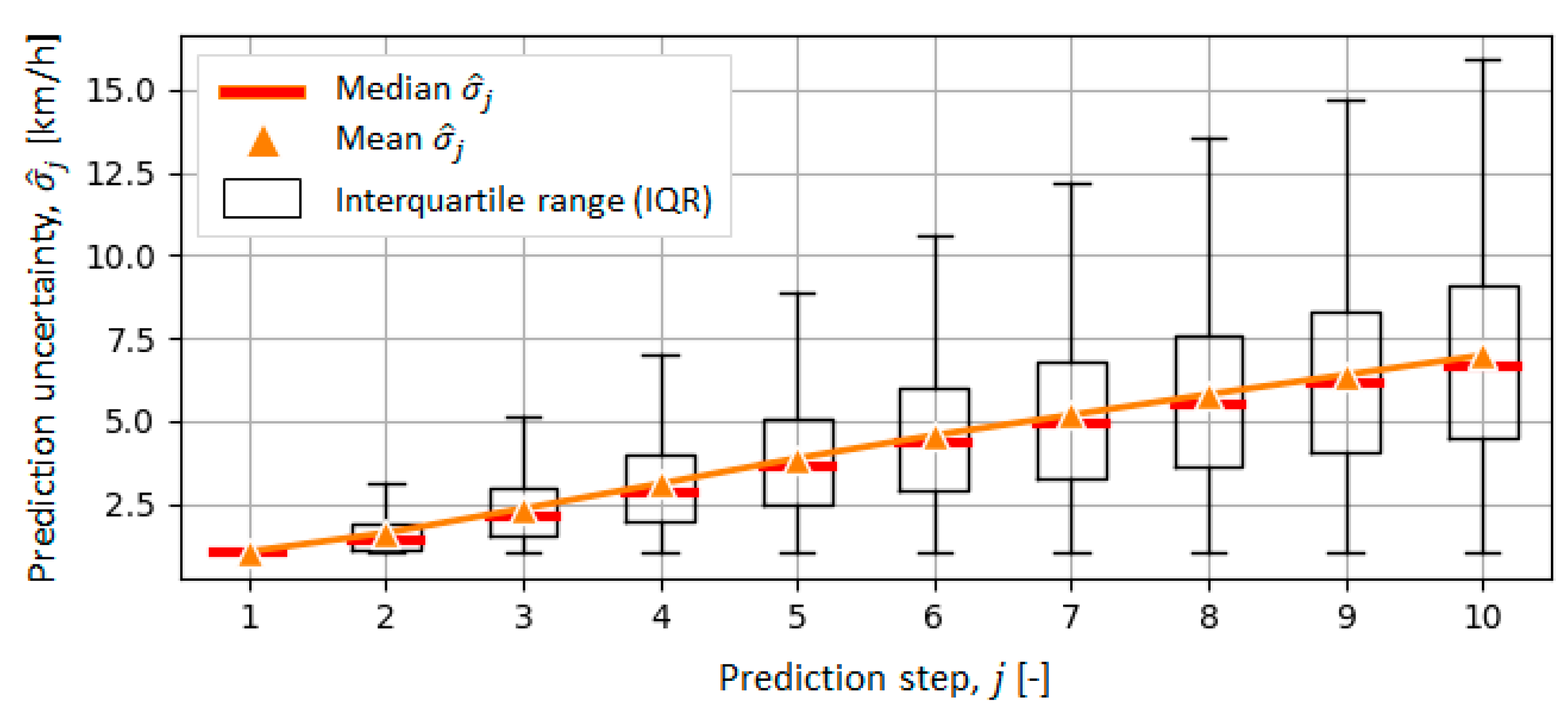
4.2.2. Analysis of Prediction Accuracy along the Prediction Horizon
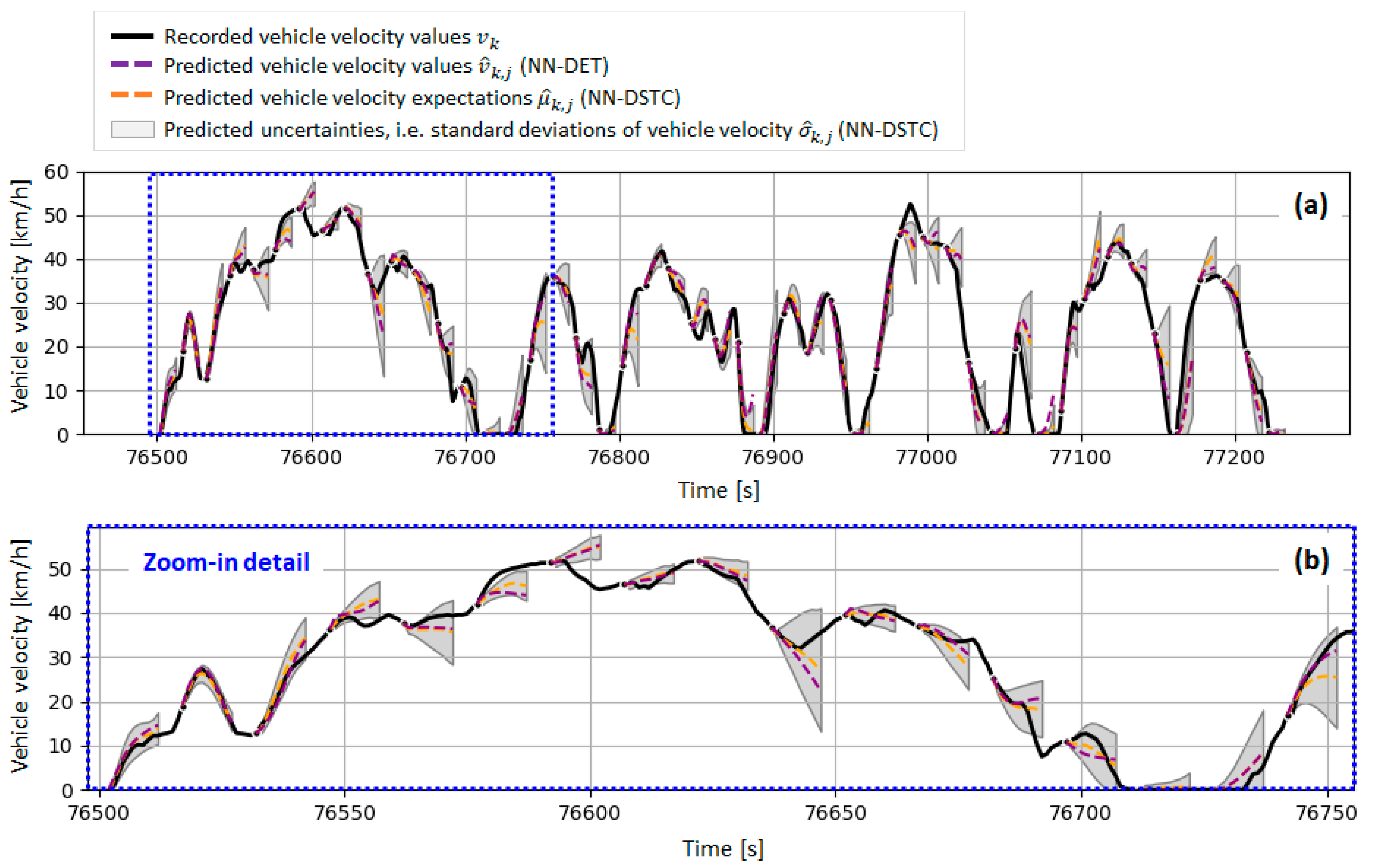
4.2.3. Analysis of Prediction Accuracy along the Route
5. Conclusions
- (a)
- Applying and examining the proposed vehicle prediction models within vehicle deterministic or stochastic model predictive control strategies (e.g., energy management strategy of a PHEV aimed at minimizing the vehicle fuel and electricity consumption for a wide range of driving cycles);
- (b)
- Considering other types of NNs, such as recurrent NNs, which can be more suitable for the task of dynamic system behaviour prediction and potentially bring further gains in model prediction accuracy;
- (c)
- Considering Markov chain-based stochastic velocity prediction method, which, in addition to the vehicle velocity (and acceleration), would also take information about the vehicle position when defining the Markov states;
- (d)
- Examining the proposed prediction models for other transport systems that are not characterized by fixed/repeating routes (unlike the city bus transport system considered herein), including different types of vehicles, as well;
- (e)
- Adding more relevant inputs to the model such as accelerator pedal opening and traffic related inputs (not available in the presented study) for potentially improved prediction performance;
- (f)
- Comparing the various developed prediction models to each other, as well as with respect to existing models.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ADAM | Adaptive Moment Estimation (optimization algorithm used for training of neural networks) |
| CAN | Controller Area Network |
| GPRS | General Packet Radio Service |
| GPS | Global Positioning System |
| MPC | Model Predictive Control |
| MSE | Mean Squared Error |
| NLL | Negative Log-Likelihood |
| NN | Neural Network |
| NN-DET | Deterministic Neural Network (model) |
| NN-DSTC | Dynamic Stochastic Neural Network (model) |
| NN-STC | Static Stochastic Neural Network (model) |
| PHEV | Plug-in Hybrid Electric Vehicle |
| RMSE | Root Mean Squared Error |
| TPM | Transition Probability Matrix |
| Table of Symbols | |
| Mean squared error of predicted vs. recorded vehicle velocities (used as loss function for NN-DSTC model) | |
| Mean of negative log-likelihoods of predicted normal distributions of vehicle velocity for each prediction step (used as loss function for NN-DET model) | |
| j | Discrete step of prediction horizon, |
| k | kth discrete time instant (i.e., data sample) of given recorded driving cycle |
| N | Total number of data samples used to train NN-DET and NN-DSTC models |
| Vehicle velocity history interval length | |
| Prediction horizon length | |
| Mean prediction RMSE calculated along the full prediction horizon for the kth time instant | |
| Mean prediction RMSE calculated for jth discrete step of prediction horizon | |
| Coefficient of determination value calculated for jth discrete step of prediction horizon | |
| Vehicle position (i.e., distance travelled from reference route departure station) for kth time instant of given recorded driving cycle | |
| Time of day for kth time instant of given recorded driving cycle | |
| Vehicle velocity for kth time instant of given recorded driving cycle | |
| Day of week for kth time instant of given recorded driving cycle | |
| Vector of historical vehicle velocities of length | |
| Vehicle velocity standard deviation calculated from test samples/population | |
| Vehicle velocity predicted by NN-DET model | |
| Vehicle velocity expectation predicted by NN-STC/NN-DSTC model | |
| Vehicle velocity standard deviation predicted by NN-STC/NN-DSTC model | |
| Set of input (training) values | |
| Set of output (target) values related to inputs |
References
- Arata, J.; Leamy, M.; Cunefare, K. Power-split HEV control strategy development with refined engine transients. SAE Int. J. Altern. Powertrains 2012, 1, 119–133. [Google Scholar] [CrossRef]
- Jauch, C.; Tamilarasan, S.; Bovee, K.; Güvenc, L.; Rizzoni, G. Modeling for drivability and drivability improving control of HEV. Control Eng. Pract. 2018, 70, 50–62. [Google Scholar] [CrossRef]
- Guzzella, L.; Sciarretta, A. Vehicle Propulsion Systems: Introduction to Modeling and Optimization, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 243–276. [Google Scholar]
- Hrovat, D.; Cairano, S.D.; Tseng, H.E.; Kolmanovsky, I.V. The development of Model Predictive Control in automotive industry: A survey. In Proceedings of the IEEE International Conference on Control Applications, Dubrovnik, Croatia, 3–5 October 2012; pp. 295–302. [Google Scholar]
- Rajamani, R. Longitudinal Vehicle Dynamics. In Vehicle Dynamics and Control, 2nd ed.; Springer: New York, NY, USA, 2006; pp. 87–111. [Google Scholar]
- Karbowski, D.; Kim, N.; Rousseau, A. Route-based online energy management of a PHEV and sensitivity to trip prediction. In Proceeding of the 2014 IEEE Vehicle Power and Propulsion Conference (VPPC), Coimbra, Portugal, 27–30 October 2014; pp. 1–6. [Google Scholar]
- Huang, Y.; Wang, H.; Khajepour, A.; He, H.; Ji, J. Model predictive control power management strategies for HEVs: A review. J. Power Sources 2017, 341, 91–106. [Google Scholar] [CrossRef]
- Lemieux, J.; Ma, Y. Vehicle Speed Prediction Using Deep Learning. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC), Montreal, QC, Canada, 19–22 October 2015; pp. 1–5. [Google Scholar]
- Zhou, Y.; Ravey, A.; Marion-Pera, M.C. A survey on driving prediction techniques for predictive energy management of plug-in hybrid electric vehicles. J. Power Sources 2019, 412, 480–495. [Google Scholar] [CrossRef]
- Sun, C.; Hu, X.; Moura, S.J.; Sun, F. Velocity Predictors for Predictive Energy Management in Hybrid Electric Vehicles. IEEE Trans. Control Syst. Technol. 2015, 23, 1197–1204. [Google Scholar]
- Mozaffari, L.; Mozaffari, A.; Azad, N.L. Vehicle speed prediction via a sliding-window time series analysis and an evolutionary least learning machine: A case study on San Francisco urban roads. Eng. Sci. Technol. Int. J. 2015, 18, 150–162. [Google Scholar] [CrossRef]
- Liu, K.; Asher, Z.; Gong, X.; Huang, M.; Kolmanovsky, I. Vehicle Velocity Prediction and Energy Management Strategy Part 1: Deterministic and Stochastic Vehicle Velocity Prediction Using Machine Learning; SAE Technical Paper, No. 2019-01-1051; SAE: Warrendale, PA, USA, 2019. [Google Scholar]
- Li, Y.; Peng, J.; He, H.; Xie, S. The Study on Multi-scale Prediction of Future Driving Cycle Based on Markov Chain. Energy Procedia 2017, 105, 3219–3224. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, W.; Qi, B. Combined Prediction for Vehicle Speed with Fixed Route. Chin. J. Mech. Eng. 2020, 33, 60. [Google Scholar] [CrossRef]
- Shin, J.; Sunwoo, M. Vehicle Speed Prediction Using a Markov Chain With Speed Constraints. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3201–3211. [Google Scholar] [CrossRef]
- Gaikwad, T.D.; Asher, Z.; Liu, K.; Huang, M.; Kolmanovsky, I. Vehicle Velocity Prediction and Energy Management Strategy Part 2: Integration of Machine Learning Vehicle Velocity Prediction with Optimal Energy Management to Improve Fuel Economy; SAE Technical Paper, No. 2019-01-1212; SAE: Warrendale, PA, USA, 2019. [Google Scholar]
- Rezaei, A.; Burl, J.B. Effects of Time Horizon on Model Predictive Control for Hybrid Electric Vehicles. IFAC-Pap. 2015, 48, 252–256. [Google Scholar] [CrossRef]
- Martinez, C.M.; Hu, X.; Cao, D.; Velenis, E.; Gao, B.; Wellers, M. Energy Management in Plug-in Hybrid Electric Vehicles: Recent Progress and a Connected Vehicles Perspective. IEEE Trans. Veh. Technol. 2017, 66, 4534–4549. [Google Scholar] [CrossRef] [Green Version]
- Van Duin, J.H.R.; Tavasszy, L.A.; Quak, H.J. Towards E(lectric)-Urban Freight: First Promising Steps in the Electric Vehicle Revolution. Eur. Transp. Trasp. Eur. 2013, 54, 9. [Google Scholar]
- Sirmatel, I.I.; Geroliminis, N. Dynamical Modeling and Predictive Control of Bus Transport Systems: A Hybrid Systems Approach. IFAC-PapersOnLine 2017, 50, 7499–7504. [Google Scholar] [CrossRef]
- Hyeon, E.; Kim, Y.; Prakash, N.; Stefanopoulou, A.G. Influence of Speed Forecasting on the Performance of Ecological Adaptive Cruise Control. In Proceedings of the ASME 2019 Dynamic Systems and Control Conference, Park City, UT, USA, 8–11 October 2019; pp. 1–8. [Google Scholar]
- Topić, J.; Škugor, B.; Deur, J. Static Stochastic Model-Based Prediction of City Bus Velocity. In Proceedings of the 5th International Conference on Smart Systems and Technologies, Osijek, Croatia, 19–21 October 2022. [Google Scholar]
- Topić, J.; Škugor, B.; Deur, J. Synthesis and Feature Selection-Supported Validation of Multidimensional Driving Cycles. Sustainability 2021, 13, 4704. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Keras. Available online: https://keras.io (accessed on 18 July 2022).
- Tensorflow. Available online: https://tensorflow.org (accessed on 18 July 2022).
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. In Proceedings of the 3rd International Conference for Learning Representations, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Number of NN Parameters | |||
|---|---|---|---|---|
| Training Set | Validation Set | Test Set | ||
| NN-DET-I1 | 11.84 | 11.84 | 11.83 | 44,074 |
| NN-DET-I2 | 7.26 | 7.28 | 7.26 | 44,330 |
| NN-DET-I3 | 6.01 | 6.12 | 6.11 | 48,938 |
| NN-DET-I4 | 4.96 | 5.07 | 5.07 | 49,194 |
| NN-DET-I5 | 4.92 | 5.03 | 5.05 | 49,450 |
| NN-DET-I6 | 4.88 | 5.03 | 5.03 | 49,706 |
| Model | Number of NN Parameters | |||
|---|---|---|---|---|
| Training Set | Validation Set | Test Set | ||
| NN-DET-Hh,3 | 5.32 | 5.35 | 5.38 | 45,354 |
| NN-DET-Hh,7 | 5.13 | 5.21 | 5.23 | 46,378 |
| NN-DET-Hh,10 | 5.00 | 5.11 | 5.10 | 47,146 |
| NN-DET-Hh,15 | 4.93 | 5.06 | 5.05 | 48,426 |
| NN-DET-Hh,20 | 4.91 | 5.02 | 5.01 | 49,706 |
| NN-DET-Hh,30 | 4.76 | 4.91 | 4.92 | 52,266 |
| NN-DET-Hh,40 | 4.70 | 4.88 | 4.86 | 54,826 |
| NN-DET-Hh,50 | 4.61 | 4.85 | 4.84 | 57,386 |
| NN-DET-Hh,100 | 4.57 | 4.85 | 4.89 | 70,186 |
| NN-DET-Hh,200 | 4.53 | 4.96 | 4.93 | 95,786 |
| Model | Number of NN Parameters | |||
|---|---|---|---|---|
| Training Set | Validation Set | Test Set | ||
| NN-DET-Hp,3 | 1.87 (2.05) * | 1.88 (2.05) | 1.90 (2.08) | 49,475 (48,707) |
| NN-DET-Hp,7 | 3.74 (4.45) | 3.83 (4.53) | 3.84 (4.52) | 49,607 (48,839) |
| NN-DET-Hp,10 | 4.84 (6.02) | 5.01 (6.13) | 5.00 (6.13) | 49,706 (48,938) |
| NN-DET-Hp,15 | 6.42 (8.14) | 6.56 (8.23) | 6.59 (8.26) | 49,871 (49,103) |
| NN-DET-Hp,20 | 7.42 (9.67) | 7.63 (9.82) | 7.58 (9.79) | 50,036 (49,268) |
| NN-DET-Hp,50 | 10.20 (13.65) | 10.34 (13.80) | 10.35 (13.76) | 51,026 (50,258) |
| NN-DET-Hp,100 | 12.04 (15.23) | 12.13 (15.33) | 12.15 (15.35) | 52,676 (51,908) |
| NN-DET-Hp,200 | 13.15 (15.77) | 13.20 (15.82) | 13.22 (15.84) | 55,976 (55,208) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Topić, J.; Škugor, B.; Deur, J. Receding-Horizon Prediction of Vehicle Velocity Profile Using Deterministic and Stochastic Deep Neural Network Models. Sustainability 2022, 14, 10674. https://doi.org/10.3390/su141710674
Topić J, Škugor B, Deur J. Receding-Horizon Prediction of Vehicle Velocity Profile Using Deterministic and Stochastic Deep Neural Network Models. Sustainability. 2022; 14(17):10674. https://doi.org/10.3390/su141710674
Chicago/Turabian StyleTopić, Jakov, Branimir Škugor, and Joško Deur. 2022. "Receding-Horizon Prediction of Vehicle Velocity Profile Using Deterministic and Stochastic Deep Neural Network Models" Sustainability 14, no. 17: 10674. https://doi.org/10.3390/su141710674
APA StyleTopić, J., Škugor, B., & Deur, J. (2022). Receding-Horizon Prediction of Vehicle Velocity Profile Using Deterministic and Stochastic Deep Neural Network Models. Sustainability, 14(17), 10674. https://doi.org/10.3390/su141710674