
A Review of the Linear Generator Type of Wave Energy Converters’ Power Take-Off Systems




Abstract
:1. Introduction
2. WEC with Linear Generator-Based Direct Electric-Drive PTO System
2.1. Different Topologies of WECs with Linear Generator-Based PTO Systems
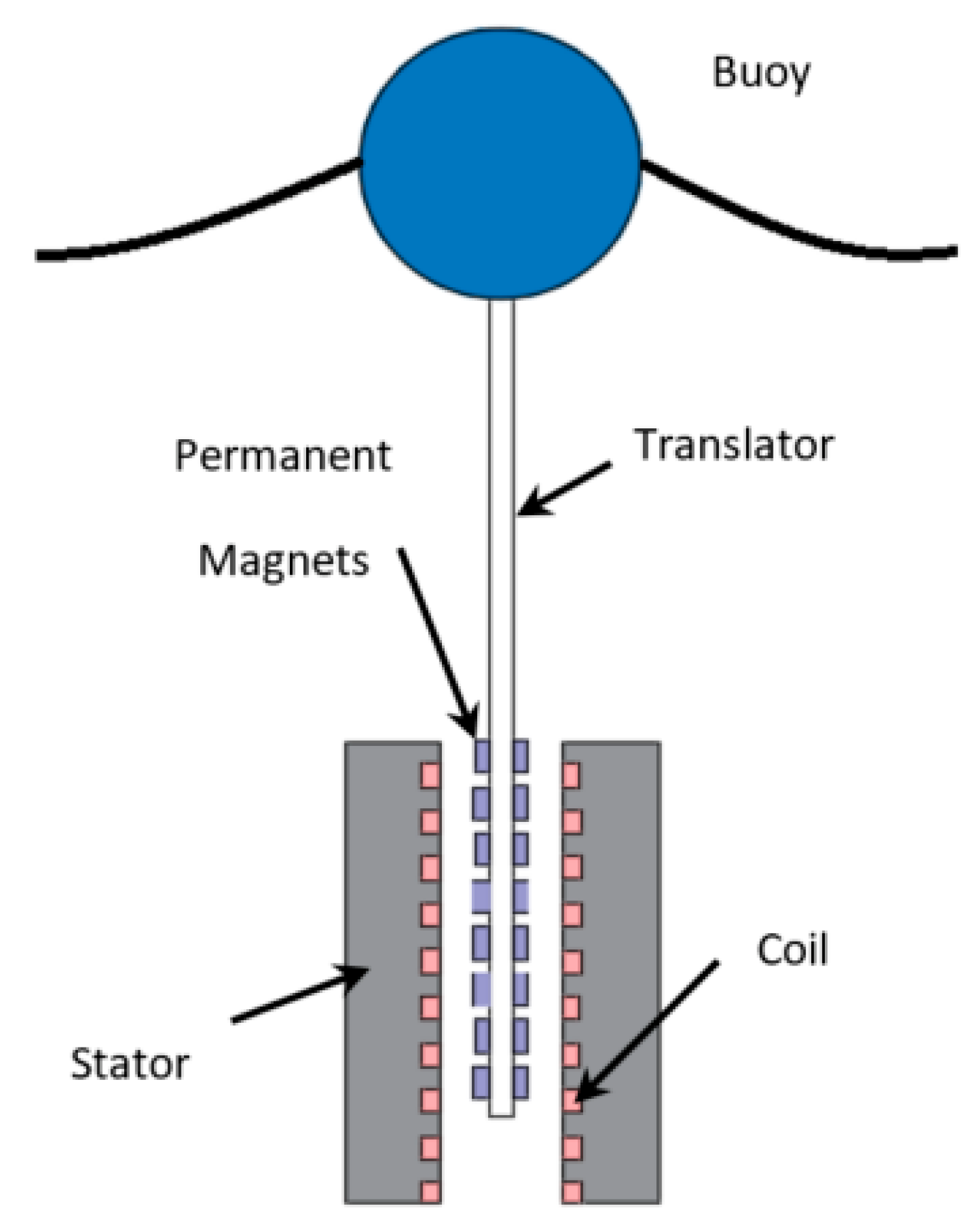
2.1.1. Floating Buoy on the Sea Surface
Single-Body Heaving Buoy System
Two-Body Heaving Buoy System
2.1.2. Fully Submerged Heaving System
2.1.3. Other Topologies of WECs with Linear Generator-Based PTO Systems
2.2. Linear Permanent Magnet (PM) Generator Topologies
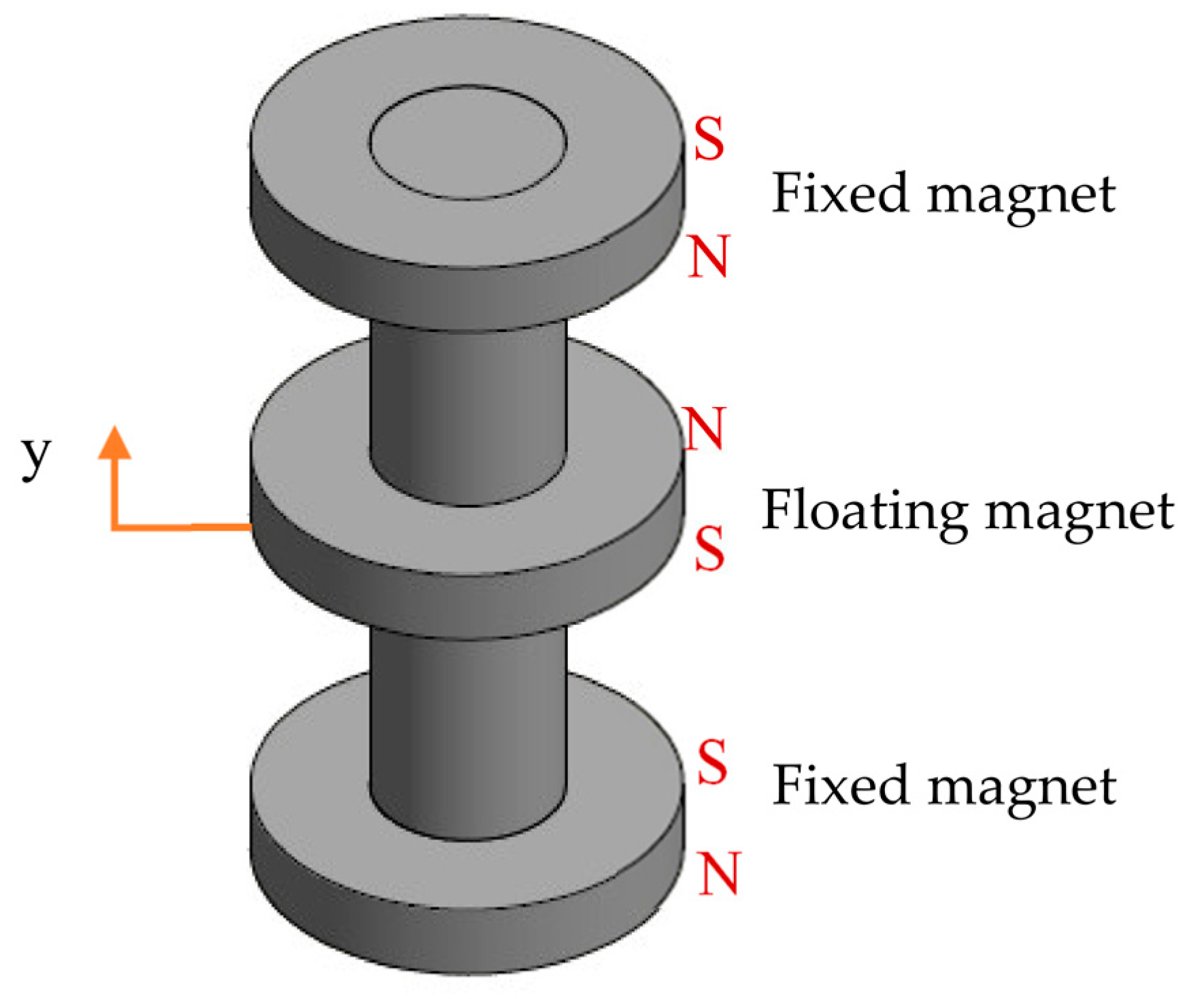
Innovative Oscillator Design Concept
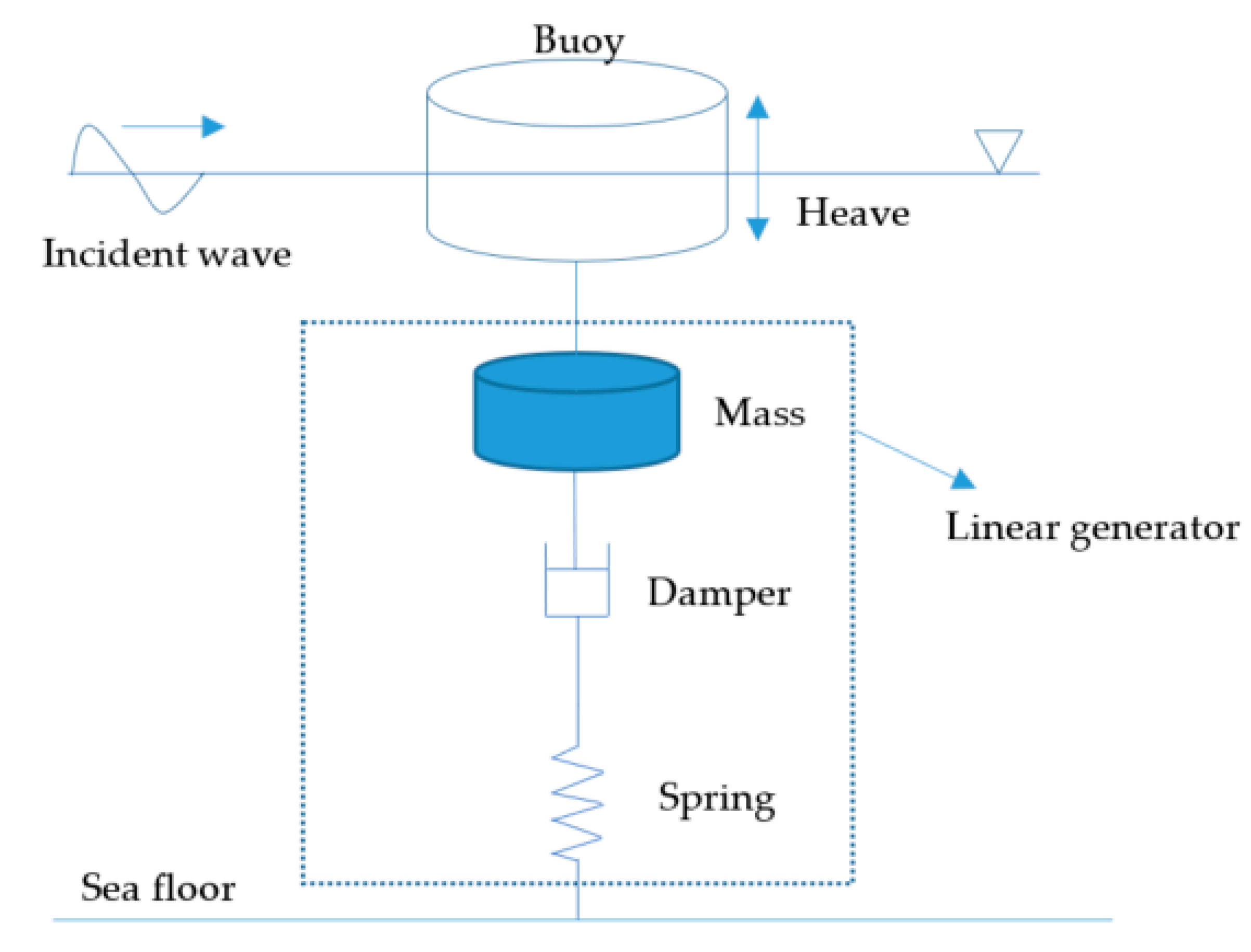
3. Mathematical Modelling
Dynamics of the WEC with Linear Permanent Magnet (PM)-Based PTO System
4. Development of the Linear PM Generator-Based PTO System for WECs
4.1. Reduction of Detent Force (Cogging Force and End Effect Force)
4.1.1. Permanent Magnet (PM) Modifications
4.1.2. Changing the Air Gap
4.1.3. Modification of the Stator Design
4.1.4. Magnetic Cores
4.2. Application of High-Grade PMs and Solving the Demagnetisation Problem
4.3. Design Concepts for Low-Frequency Wave Range
4.4. Using Magnetic Gearing to Increase the Speed of the Translator
4.5. Other Design Concepts to Increase the Efficiency of the Generator
4.6. Using Advanced Numerical Simulation for Parameter Study
4.7. Design Optimisation to Maximize the Performance
5. Control Systems of the Linear PM Generator-Based PTO System
5.1. Hydrodynamic Control
5.2. Generator Control (PTO Control)
5.2.1. Latching Control
5.2.2. Model Predictive Control (MPC)
5.2.3. Nonlinear Model Predictive Control (NMPC)
5.2.4. Other Control Systems
5.3. Grid Control (Load Side Control)
6. Performance Analysis of the Linear Generator-Based WEC
6.1. Numerical Analysis
6.2. Experimental Analysis
6.2.1. Wave Tank Test
6.2.2. Open Sea Test
7. Costs and Challenges of the Linear Generator-Type PTO System for Wave Energy Conversion Technology
8. Conclusions and Remarks
- Linear generators are suitable for wave energy conversion if the devices are buoyant-moored with linear motion and operate with speeds of 1 m/s or more.
- Compared with other linear generator types, the linear PM synchronous generator is the most suitable for wave energy conversion because it has higher reliability and efficiency due to the more significant driving force.
- ○
- The planar/flat-type linear PM synchronous generators are preferred for high-power applications.
- ○
- The tubular-type linear PM synchronous generators are suitable for low-power applications because they offer high power or force density.
- ○
- Tubular-type linear PM generators with a long translator inside the generator perform better, with less cogging force.
- ○
- Three-phase generators are more efficient than single-phase generators due to their higher energy generation.
- ○
- Iron-cored generators are more suitable than air-cored generators because their power generation ability is higher.
- ○
- The most significant power is produced when the PMs are attached to the translator.
- ○
- Quasi-Halbach arrangements are preferred for improving the power generation efficiency with minimum losses.
- The force mainly determines the generator size it has to create. In wave energy conversion, the speeds are typically relatively low. The force should be high if the aim is to generate a large amount of power at a low speed. Therefore, the cost of the generator increases. The switched reluctance generators, variable reluctance generators, transverse flux PM machines and Vernier hybrid machines are suitable designs and have high force density. This limited force density does not influence the performances of these generator types and is suitable for low-power applications. However, they have disadvantages, such as complex construction structure, low power factor, complex iron losses and eddy current losses. Although they have some drawbacks, they can be viewed as an alternative to the typical linear PM generator in the future.
- Clever designs such as double-sided and cylindrical arrangements could decrease the cost.
- Superconducting linear generators are suitable for the WEC based on the linear generator in terms of low power application because it has a high current-carrying ability, producing much higher flux density with low-speed motion and lighter weight. However, it has a high manufacturing and material costs.
- Innovative techniques for increasing the speed of the linear motion of the WEC.
- Study other types of generators with higher force densities and perhaps better performances.
- Study of air-cored generators in terms of their prospects for a practical combined electrical-mechanical structural design solution.
- Deployment in ocean environments for trials over the long term.
- Innovative designs for cutting down the cost of generator construction.
- Innovative designs for solving the low-frequency problem.
- Innovative systems for the transmission of the generated power to the grid.
- Implementation of control systems in the deployed WEC during sea trials.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Acronyms
| Symbols | Abbreviations | Symbols | Abbreviations |
| AWS | Archimedes Wave Swing | Emf per phase | |
| BEM | Boundary element method | Wave force coefficient | |
| CTA | Constant Torque Angle Control | and | Pull-out forces of the mover 1 and 2 |
| EMF | Electromotive force | Buoy force | |
| FEA | Finite element analysis | Wave excitation force | |
| FEM | Finite element method | Electromagnetic force | |
| GA | Genetic Algorithm | Generator force | |
| ICM | Improved conformal mapping | Hydrostatic force | |
| MEC | Magnetic equivalent circuit | Wave radiation force | |
| MPC | Model Predictive Control | Gear ratio | |
| MPPT | Maximum power point tracking | Gravity acceleration | |
| MTPA | Maximum Torque per Ampere | Spring constant | |
| NMPC | Nonlinear model predictive control | Current inside the coil | |
| OSU | Oregon State University | Inductance of the coil | |
| PA | Point absorber | m | Sum of the translator and buoy mass |
| PM | Permanent magnet | Added mass | |
| PMLG | Permanent magnet linear generator | Number of active PM pole pairs in the mover 1 and 2 | |
| PSO | Particle Swarm Optimization | Natural frequency | |
| PTO | Power take-off system | Phase of the regular wave | |
| UU | Uppsala University | Load resistance of the circuit | |
| WEC | Wave energy converters | Radiation damping | |
| A and B | State or system matrix and input matrix | Density of the sea water | |
| Amplitude of the wave | Output phase voltage | ||
| Radius of the buoy | Density of the sea water | ||
| Coupling coefficient | Seed of the mover 1 and 2 | ||
| Magnetic flux density | Voltage inside the coil | ||
| Sum of the mechanical and electrical damping of the generator | , and | Acceleration, velocity and position of the translator or moving magnet, respectively | |
| Damping coefficient | Total damping ratio | ||
| Generator electrical damping coefficient | mechanical damping ratio | ||
| C and D | Output matrix and zero matrix |
References
- Ahamed, R.; McKee, K.; Howard, I. Advancements of wave energy converters based on power take off (PTO) systems: A review. Ocean Eng. 2020, 204, 107248. [Google Scholar] [CrossRef]
- Day, A.; Babarit, A.; Fontaine, A.; He, Y.-P.; Kraskowski, M.; Murai, M.; Penesis, I.; Salvatore, F.; Shin, H.-K. Hydrodynamic modelling of marine renewable energy devices: A state of the art review. Ocean Eng. 2015, 108, 46–69. [Google Scholar] [CrossRef]
- Xu, S.; Wang, S.; Soares, C.G. Review of mooring design for floating wave energy converters. Renew. Sustain. Energy Rev. 2019, 111, 595–621. [Google Scholar] [CrossRef]
- Hong, Y.; Waters, R.; Boström, C.; Eriksson, M.; Engström, J.; Leijon, M. Review on electrical control strategies for wave energy converting systems. Renew. Sustain. Energy Rev. 2014, 31, 329–342. [Google Scholar] [CrossRef]
- Gao, Y.; Shao, S.; Zou, H.; Tang, M.; Xu, H.; Tian, C. A fully floating system for a wave energy converter with direct-driven linear generator. Energy 2016, 95, 99–109. [Google Scholar] [CrossRef]
- Zhang, J.; Yu, H.; Shi, Z. Design and Experiment Analysis of a Direct-Drive Wave Energy Converter with a Linear Generator. Energies 2018, 11, 735. [Google Scholar] [CrossRef]
- Polinder, H.; Mecrow, B.C.; Jack, A.G.; Dickinson, P.G.; Mueller, M.A. Conventional and TFPM linear generators for direct-drive wave energy conversion. IEEE Trans. Energy Convers. 2005, 20, 260–267. [Google Scholar] [CrossRef]
- Leijon, M.; Boström, C.; Danielsson, O.; Gustafsson, S.; Haikonen, K.; Langhamer, O.; Strömstedt, E.; Stålberg, M.; Sundberg, J.; Svensson, O. Wave energy from the North Sea: Experiences from the Lysekil research site. Surv. Geophys. 2008, 29, 221–240. [Google Scholar] [CrossRef]
- Polinder, H.; Damen, M.; Gardner, F. Design, modelling and test results of the AWS PM linear generator. Eur. Trans. Electr. Power 2005, 15, 245–256. [Google Scholar] [CrossRef]
- Chatzigiannakou, M.A.; Ulvgård, L.; Temiz, I.; Leijon, M. Offshore deployments of wave energy converters by Uppsala University, Sweden. Mar. Syst. Ocean Technol. 2019, 14, 67–74. [Google Scholar] [CrossRef]
- Polinder, H.; Mueller, M.; Scuotto, M.; Goden de Sousa Prado, M. Linear generator systems for wave energy conversion. In Proceedings of the 7th European Wave and Tidal Energy Conference, Porto, Portugal, 11–13 September 2007; IDMEC-Institute de Engenharia Mecânica: Lisbon, Portugal, 2007. [Google Scholar]
- Trapanese, M.; Boscaino, V.; Cipriani, G.; Curto, D.; Di Dio, V.; Franzitta, V. A permanent magnet linear generator for the enhancement of the reliability of a wave energy conversion system. IEEE Trans. Ind. Electron. 2018, 66, 4934–4944. [Google Scholar] [CrossRef]
- Saeed, O.; Wahyudie, A.; Susilo, T.B.; Shareef, H. Simple resonance circuit to improve electrical power conversion in a two-sided planar permanent magnet linear generator for wave energy converters. IEEE Access 2017, 5, 18654–18664. [Google Scholar] [CrossRef]
- Mueller, M. Electrical generators for direct drive wave energy converters. IEE Proc.-Gener. Transm. Distrib. 2002, 149, 446–456. [Google Scholar] [CrossRef]
- Faiz, J.; Nematsaberi, A. Linear electrical generator topologies for direct-drive marine wave energy conversion-an overview. IET Renew. Power Gener. 2017, 11, 1163–1176. [Google Scholar] [CrossRef]
- Khatri, P.; Wang, X. Comprehensive review of a linear electrical generator for ocean wave energy conversion. IET Renew. Power Gener. 2019, 14, 949–958. [Google Scholar] [CrossRef]
- Curto, D.; Viola, A.; Franzitta, V.; Trapanese, M.; Cardona, F. A New Solution for Sea Wave Energy Harvesting, the Proposal of an Ironless Linear Generator. J. Mar. Sci. Eng. 2020, 8, 93. [Google Scholar] [CrossRef]
- Drew, B.; Plummer, A.R.; Sahinkaya, M.N. A review of wave energy converter technology. In Sage Publications; Sage UK: London, UK, 2009. [Google Scholar]
- Rusu, E.; Venugopal, V. Offshore Renewable Energy: Ocean Waves, Tides and Offshore Wind; MDPI: Basel, Switzerland, 2019. [Google Scholar]
- Rhinefrank, K.; Agamloh, E.; von Jouanne, A.; Wallace, A.; Prudell, J.; Kimble, K.; Aills, J.; Schmidt, E.; Chan, P.; Sweeny, B. Novel ocean energy permanent magnet linear generator buoy. Renew. Energy 2006, 31, 1279–1298. [Google Scholar] [CrossRef]
- Hai, L.; Svensson, O.; Isberg, J.; Leijon, M. Modelling a point absorbing wave energy converter by the equivalent electric circuit theory: A feasibility study. J. Appl. Phys. 2015, 117, 164901. [Google Scholar] [CrossRef]
- López, I.; Andreu, J.; Ceballos, S.; De Alegría, I.M.; Kortabarria, I. Review of wave energy technologies and the necessary power-equipment. Renew. Sustain. Energy Rev. 2013, 27, 413–434. [Google Scholar] [CrossRef]
- Bastien, S.P.; Sepe, R.B.; Grilli, A.R.; Grilli, S.T.; Spaulding, M.L. Ocean wave energy harvesting buoy for sensors. In Proceedings of the IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 3718–3725. [Google Scholar]
- Panicker, P. The Vertical Axis Oscillating Wave Power Generator. Available online: https://contest.techbriefs.com/2012/entries/sustainable-technologies/2496 (accessed on 10 June 2022).
- Castellucci, V.; Eriksson, M.; Waters, R. Impact of tidal level variations on wave energy absorption at wave hub. Energies 2016, 9, 843. [Google Scholar] [CrossRef]
- Waters, R.; Stålberg, M.; Danielsson, O.; Svensson, O.; Gustafsson, S.; Strömstedt, E.; Eriksson, M.; Sundberg, J.; Leijon, M. Experimental results from sea trials of an offshore wave energy system. Appl. Phys. Lett. 2007, 90, 034105. [Google Scholar] [CrossRef]
- Prudell, J.; Stoddard, M.; Brekken, T.K.; von Jouanne, A. A novel permanent magnet tubular linear generator for ocean wave energy. In Proceedings of the Energy Conversion Congress and Exposition, ECCE 2009, San Jose, CA, USA, 20–24 September 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 3641–3646. [Google Scholar]
- Brekken, T.K.; Von Jouanne, A.; Han, H.Y. Ocean wave energy overview and research at Oregon State University. In Proceedings of the Power Electronics and Machines in Wind Applications, 2009, PEMWA 2009, Lincoln, NE, USA, 24–26 June 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 1–7. [Google Scholar]
- Amiri, A.; Panahi, R.; Radfar, S. Parametric study of two-body floating-point wave absorber. J. Mar. Sci. Appl. 2016, 15, 41–49. [Google Scholar] [CrossRef]
- Al Shami, E.; Zhang, R.; Wang, X. Point absorber wave energy harvesters: A review of recent developments. Energies 2019, 12, 47. [Google Scholar] [CrossRef]
- Boscaino, V.; Cipriani, G.; Di Dio, V.; Franzitta, V.; Trapanense, M. Experimental test and simulations on a linear generator-based prototype of a wave energy conversion system designed with a reliability-oriented approach. Sustainability 2017, 9, 98. [Google Scholar] [CrossRef]
- Jin, C.; Kang, H.; Kim, M.; Bakti, F.P. Performance evaluation of surface riding wave energy converter with linear electric generator. Ocean Eng. 2020, 218, 108141. [Google Scholar] [CrossRef]
- Seo, S.-W.; Shin, K.-H.; Koo, M.-M.; Hong, K.; Yoon, I.-J.; Choi, J.-Y. Experimentally Verifying the Generation Characteristics of a Double-Sided Linear Permanent Magnet Synchronous Generator for Ocean Wave Energy Conversion. IEEE Trans. Appl. Supercond. 2020, 30, 1–4. [Google Scholar] [CrossRef]
- Huang, L.; Yu, H.; Hu, M.; Liu, C.; Yuan, B. Research on a tubular primary permanent-magnet linear generator for wave energy conversions. IEEE Trans. Magn. 2013, 49, 1917–1920. [Google Scholar] [CrossRef]
- Di Dio, V.; Franzitta, V.; Milone, D.; Pitruzzella, S.; Trapanese, M.; Viola, A. Design of Bilateral Switched Reluctance Linear Generator to Convert Wave Energy: Case Study in Sicily; Advanced Materials Research; Trans Tech Publications: Zurich, Switzerland, 2014; pp. 1694–1698. [Google Scholar]
- Baker, N.J.; Raihan, M.A.; Almoraya, A.A. A cylindrical linear permanent magnet Vernier hybrid machine for wave energy. IEEE Trans. Energy Convers. 2018, 34, 691–700. [Google Scholar] [CrossRef]
- Mueller, M.; Baker, N.; Ran, L.; Chong, N.; Wei, H.; Tavner, P.; McKeever, P. Experimental Tests of an Air-Cored PM Tubular Generator for Direct Drive Wave Energy Converters; IET: Auburn Hills, MI, USA, 2008. [Google Scholar]
- Wahyudie, A.; Jama, M.; Susilo, T.B.; Mon, B.F.; Shaaref, H.; Noura, H. Design and testing of a laboratory scale test rig for wave energy converters using a double-sided permanent magnet linear generator. IET Renew. Power Gener. 2017, 11, 922–930. [Google Scholar] [CrossRef]
- Wahyudie, A.; Susilo, T.B.; Jama, M.; Mon, B.F.; Shaaref, H. Design of a Double-Sided Permanent Magnet Linear Generator for Laboratory Scale Ocean Wave Energy Converter; OCEANS 2017-Anchorage; IEEE: Piscataway, NJ, USA, 2017; pp. 1–5. [Google Scholar]
- Joseph, D.M.; Cronje, W.A. Design and analysis of a double-sided tubular linear synchronous generator with particular application to wave-energy conversion. In Proceedings of the 2007 IEEE Power Engineering Society Conference and Exposition in Africa-PowerAfrica, Johannesburg, South Africa, 16–20 July 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 1–8. [Google Scholar]
- Prudell, J.; Stoddard, M.; Amon, E.; Brekken, T.K.; Von Jouanne, A. A permanent-magnet tubular linear generator for ocean wave energy conversion. IEEE Trans. Ind. Appl. 2010, 46, 2392–2400. [Google Scholar] [CrossRef]
- Liu, C.; Yu, H.; Hu, M.; Liu, Q.; Zhou, S.; Huang, L. Research on a permanent magnet tubular linear generator for direct drive wave energy conversion. IET Renew. Power Gener. 2013, 8, 281–288. [Google Scholar] [CrossRef]
- Vining, J.; Lipo, T.; Venkataramanan, G. Design and optimization of a novel hybrid transverse/longitudinal flux, wound-field linear machine for ocean wave energy conversion. In Proceedings of the 2009 IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 3726–3733. [Google Scholar]
- Tan, Y.; Lin, K.; Zu, J.W. Analytical modelling of Halbach linear generator incorporating pole shifting and piece-wise spring for ocean wave energy harvesting. AIP Adv. 2018, 8, 056615. [Google Scholar] [CrossRef]
- Ran, L.; Mueller, M.; Ng, C.; Tavner, P.; Zhao, H.; Baker, N.; McDonald, S.; McKeever, P. Power conversion and control for a linear direct drive permanent magnet generator for wave energy. IET Renew. Power Gener. 2011, 5, 1–9. [Google Scholar] [CrossRef]
- Wang, X. Frequency Analysis of Vibration Energy Harvesting Systems; Academic Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Ahamed, R.; Howard, I.; McKee, K. Study of gravitational force effects, magnetic restoring forces and coefficients of the magnetic spring-based nonlinear oscillator system. IEEE Trans. Magn. 2022. [Google Scholar] [CrossRef]
- Beeby, S.P.; Wang, L.; Zhu, D.; Weddell, A.S.; Merrett, G.V.; Stark, B.; Szarka, G.; Al-Hashimi, B.M. A comparison of power output from linear and nonlinear kinetic energy harvesters using real vibration data. Smart Mater. Struct. 2013, 22, 075022. [Google Scholar] [CrossRef]
- Owens, B.A.; Mann, B.P. Linear and nonlinear electromagnetic coupling models in vibration-based energy harvesting. J. Sound Vib. 2012, 331, 922–937. [Google Scholar] [CrossRef]
- Xiao, X.; Xiao, L.; Peng, T. Comparative study on power capture performance of oscillating-body wave energy converters with three novel power take-off systems. Renew. Energy 2017, 103, 94–105. [Google Scholar] [CrossRef]
- Gao, M.; Wang, Y.; Wang, Y.; Wang, P. Experimental investigation of non-linear multi-stable electromagnetic-induction energy harvesting mechanism by magnetic levitation oscillation. Appl. Energy 2018, 220, 856–875. [Google Scholar] [CrossRef]
- Masoumi, M.; Wang, Y. Repulsive magnetic levitation-based ocean wave energy harvester with variable resonance: Modeling, simulation and experiment. J. Sound Vib. 2016, 381, 192–205. [Google Scholar] [CrossRef]
- Le Méhauté, B. An Introduction to Hydrodynamics and Water Waves; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Cheng, Z.; Yang, J.; Hu, Z.; Xiao, L. Frequency/time domain modeling of a direct drive point absorber wave energy converter. Sci. China Phys. Mech. Astron. 2014, 57, 311–320. [Google Scholar] [CrossRef]
- Engström, J.; Kurupath, V.; Isberg, J.; Leijon, M. A resonant two body system for a point absorbing wave energy converter with direct-driven linear generator. J. Appl. Phys. 2011, 110, 124904. [Google Scholar] [CrossRef]
- Zurkinden, A.S.; Ferri, F.; Beatty, S.; Kofoed, J.P.; Kramer, M. Non-linear numerical modeling and experimental testing of a point absorber wave energy converter. Ocean Eng. 2014, 78, 11–21. [Google Scholar] [CrossRef]
- Wang, L.; Engström, J.; Göteman, M.; Isberg, J. Constrained optimal control of a point absorber wave energy converter with linear generator. J. Renew. Sustain. Energy 2015, 7, 043127. [Google Scholar] [CrossRef]
- Huang, L.; Hu, M.; Yu, H.; Liu, C.; Chen, Z. Design and experiment of a direct-drive wave energy converter using outer-PM linear tubular generator. IET Renew. Power Gener. 2016, 11, 353–360. [Google Scholar] [CrossRef]
- Li, W.; Chau, K.; Lee, C.H.; Ching, T.; Chen, M.; Jiang, J. A new linear magnetic gear with adjustable gear ratios and its application for direct-drive wave energy extraction. Renew. Energy 2017, 105, 199–208. [Google Scholar] [CrossRef]
- Stålberg, M.; Waters, R.; Danielsson, O.; Leijon, M. Influence of generator damping on peak power and variance of power for a direct drive wave energy converter. J. Offshore Mech. Arct. Eng. 2008, 130, 031003. [Google Scholar] [CrossRef]
- Mann, B.; Owens, B. Investigations of a nonlinear energy harvester with a bistable potential well. J. Sound Vib. 2010, 329, 1215–1226. [Google Scholar] [CrossRef]
- Williams, C.; Yates, R.B. Analysis of a micro-electric generator for microsystems. Sens. Actuators A Phys. 1996, 52, 8–11. [Google Scholar] [CrossRef]
- Zheng, Z.-Q.; Huang, P.; Gao, D.-X.; Chang, Z.-Y. Analysis of electromagnetic force of the linear generator in point absorber wave energy converters. J. Mar. Sci. Technol. 2015, 23, 475–480. [Google Scholar]
- Faiz, J.; Nematsaberi, A. Linear permanent magnet generator concepts for direct-drive wave energy converters: A comprehensive review. In Proceedings of the 2017 12th IEEE Conference on Industrial Electronics and Applications (ICIEA), Siem Reap, Cambodia, 18–20 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 618–623. [Google Scholar]
- Lejerskog, E.; Boström, C.; Hai, L.; Waters, R.; Leijon, M. Experimental results on power absorption from a wave energy converter at the Lysekil wave energy research site. Renew. Energy 2015, 77, 9–14. [Google Scholar] [CrossRef]
- Wang, L.; Lin, M.; Tedeschi, E.; Engstrm, J.; Isberg, J. Improving electric power generation of a standalone wave energy converter via optimal electric load control. Energy 2020, 211, 118945. [Google Scholar] [CrossRef]
- Youn, S.W.; Lee, J.J.; Yoon, H.S.; Koh, C.S. A new cogging-free permanent-magnet linear motor. IEEE Trans. Magn. 2008, 44, 1785–1790. [Google Scholar] [CrossRef]
- Kimoulakis, N.M.; Kladas, A.G.; Tegopoulos, J.A. Cogging force minimization in a coupled permanent magnet linear generator for sea wave energy extraction applications. IEEE Trans. Magn. 2009, 45, 1246–1249. [Google Scholar] [CrossRef]
- Faiz, J.; Ebrahimi-Salari, M.; Shahgholian, G. Reduction of cogging force in linear permanent-magnet generators. IEEE Trans. Magn. 2009, 46, 135–140. [Google Scholar] [CrossRef]
- Ekergård, B. Full scale applications of permanent magnet electromagnetic energy converters: From Nd2Fe14B to ferrite. Ph.D. Thesis, Boel Ekergård, Uppsala University, Uppsala, Sweden, 2013. [Google Scholar]
- Ekergård, B.; Leijon, M. Longitudinal End Effects in a Linear Wave Power Generator. Energies 2020, 13, 327. [Google Scholar] [CrossRef]
- Liu, C.; Yu, H.; Hu, M.; Liu, Q.; Zhou, S. Detent force reduction in permanent magnet tubular linear generator for direct-driver wave energy conversion. IEEE Trans. Magn. 2013, 49, 1913–1916. [Google Scholar] [CrossRef]
- Guo, R.; Yu, H.; Xia, T.; Shi, Z.; Zhong, W.; Liu, X. A simplified subdomain analytical model for the design and analysis of a tubular linear permanent magnet oscillation generator. IEEE Access 2018, 6, 42355–42367. [Google Scholar] [CrossRef]
- Danielsson, O.; Leijon, M.; Sjostedt, E. Detailed study of the magnetic circuit in a longitudinal flux permanent-magnet synchronous linear generator. IEEE Trans. Magn. 2005, 41, 2490–2495. [Google Scholar] [CrossRef]
- Viola, A.; Franzitta, V.; Curto, D.; Trapanese, M.; Di Dio, V.; Cipriani, G.; Boscaino, V.; Corpora, M.; Raimondi, F.M. Design of Wave Energy Converter (WEC): A Prototype Installed in Sicily; OCEANS 2015-Genova, 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–5. [Google Scholar]
- Bianchi, N.; Bolognani, S.; Cappello, A. Reduction of cogging force in PM linear motors by pole-shifting. IEE Proc.-Electr. Power Appl. 2005, 152, 703–709. [Google Scholar] [CrossRef]
- Zhang, J.; Yu, H.; Hu, M.; Huang, L.; Xia, T. Research on a PM Slotless Linear Generator Based on Magnet Field Analysis Model for Wave Energy Conversion. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Zhang, J.; Yu, H.; Chen, Q.; Hu, M.; Huang, L.; Liu, Q. Design and experimental analysis of AC linear generator with Halbach PM arrays for direct-drive wave energy conversion. IEEE Trans. Appl. Supercond. 2013, 24, 1–4. [Google Scholar] [CrossRef]
- Molla, S.; Farrok, O. Vitroperm 500F and supermendur ferromagnetic cores used in a linear generator for oceanic wave energy conversion. In Proceedings of the 2019 International Conference on Robotics, Electrical and Signal Processing Techniques (ICREST), Dhaka, Bangladesh, 10–12 January 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 602–605. [Google Scholar]
- Vermaak, R.; Kamper, M.J. Experimental evaluation and predictive control of an air-cored linear generator for direct-drive wave energy converters. IEEE Trans. Ind. Appl. 2012, 48, 1817–1826. [Google Scholar] [CrossRef]
- Farrok, O.; Islam, M.R.; Sheikh, M.R.I.; Guo, Y.; Zhu, J.; Lei, G. A novel method to avoid degradation due to demagnetization of PM linear generators for oceanic wave energy extraction. In Proceedings of the 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, NSW, Australia, 11–14 August 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Nilsson, K.; Danielsson, O.; Leijon, M. Electromagnetic forces in the air gap of a permanent magnet linear generator at no load. J. Appl. Phys. 2006, 99, 034505. [Google Scholar] [CrossRef]
- Yu, H.; Liu, C.; Yuan, B.; Hu, M.; Huang, L.; Zhou, S. A permanent magnet tubular linear generator for wave energy conversion. J. Appl. Phys. 2012, 111, 07A741. [Google Scholar] [CrossRef]
- Gargov, N.; Zobaa, A.; Pisica, I. Separated magnet yoke for permanent magnet linear generator for marine wave energy converters. Electr. Power Syst. Res. 2014, 109, 63–70. [Google Scholar] [CrossRef]
- Liu, C.-T.; Lin, C.-L.; Hwang, C.-C.; Tu, C.-H. Compact model of a slotless tubular linear generator for renewable energy performance assessments. IEEE Trans. Magn. 2010, 46, 1467–1470. [Google Scholar] [CrossRef]
- Crozier, R.; Bailey, H.; Mueller, M.; Spooner, E.; McKeever, P. Analysis, design and testing of a novel direct-drive wave energy converter system. IET Renew. Power Gener. 2013, 7, 565–573. [Google Scholar] [CrossRef]
- Szabo, L.; Oprea, C. Wave energy plants for the black sea possible energy converter structures. In Proceedings of the 2007 International Conference on Clean Electrical Power, Capri, Italy, 21–23 May 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 306–311. [Google Scholar]
- Danielsson, O.; Leijon, M. Flux distribution in linear permanent-magnet synchronous machines including longitudinal end effects. IEEE Trans. Magn. 2007, 43, 3197–3201. [Google Scholar] [CrossRef]
- Baker, N.J.; Spooner, E.; Mueller, M. Permanent Magnet Air-Cored Tubular Linear Generator for Marine Energy Converters; IEE Conference Publication, 2004; IET: London, UK, 2004; pp. 862–867. [Google Scholar]
- McDonald, A.; Mueller, M.; Jeffrey, J. Development of a novel permanent magnet linear generator topology for direct-drive wave energy converters. In Proceedings of the 2008 4th IET Conference on Power Electronics, Machines and Drives, York, UK, 2–4 April 2008; IET: London, UK, 2008; pp. 81–85. [Google Scholar]
- Clifton, P.; McMahon, R.; Kelly, H. Design and commissioning of a 30 kW direct drive wave generator. In Proceedings of the 5th IET International Conference on Power Electronics, Machines and Drives (PEMD 2010), Brighton, UK, 19–21 April 2010; IET: London, UK, 2010; pp. 1–6. [Google Scholar]
- Vermaak, R.; Kamper, M.J. Design aspects of a novel topology air-cored permanent magnet linear generator for direct drive wave energy converters. IEEE Trans. Ind. Electron. 2011, 59, 2104–2115. [Google Scholar] [CrossRef]
- Hodgins, N.; Keysan, O.; McDonald, A.S.; Mueller, M.A. Design and testing of a linear generator for wave-energy applications. IEEE Trans. Ind. Electron. 2011, 59, 2094–2103. [Google Scholar] [CrossRef]
- Gargov, N.; Zobaa, A. Multi-phase air-cored tubular permanent magnet linear generator for wave energy converters. IET Renew. Power Gener. 2012, 6, 171–176. [Google Scholar] [CrossRef]
- Farrok, O.; Kiran, M.R.; Islam, M.R.; Xu, W.; Zhu, J. Core loss minimization of the linear generator by using high graded magnetic materials for harvesting oceanic wave energy. In Proceedings of the 2019 IEEE International Electric Machines & Drives Conference (IEMDC), San Diego, CA, USA, 12–15 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1762–1765. [Google Scholar]
- Rahman, A.; Farrok, O.; Islam, M.R.; Xu, W. Recent Progress in Electrical Generators for Oceanic Wave Energy Conversion. IEEE Access 2020, 8, 138595–138615. [Google Scholar] [CrossRef]
- Demenko, A.; Kulig, S.; Nowak, L.; Zawirski, K.; Parel, T.S.; Rotaru, M.D.; Sykulski, J.K.; Hearn, G.E. Optimisation of a tubular linear machine with permanent magnets for wave energy extraction. COMPEL-Int. J. Comput. Math. Electr. Electron. Eng. 2011, 30, 1056–1068. [Google Scholar] [CrossRef]
- Molla, S.; Farrok, O.; Islam, M.R.; Muttaqi, K.M. Application of iron nitride compound as alternative permanent magnet for designing linear generators to harvest oceanic wave energy. IET Electr. Power Appl. 2020, 14, 762–770. [Google Scholar] [CrossRef]
- Wang, W.; Cao, J.; Zhang, N.; Lin, J.; Liao, W.-H. Magnetic-spring based energy harvesting from human motions: Design, modeling and experiments. Energy Convers. Manag. 2017, 132, 189–197. [Google Scholar] [CrossRef]
- Chiu, M.-C.; Chang, Y.-C.; Yeh, L.-J.; Chung, C.-H. Optimal design of a vibration-based electromagnetic energy harvester using a simulated annealing algorithm. J. Mech. 2012, 28, 691–700. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, Y.; Kim, E.S. Power generation from human body motion through magnet and coil arrays with magnetic spring. J. Appl. Phys. 2014, 115, 064908. [Google Scholar] [CrossRef]
- Farrok, O.; Islam, M.R.; Muttaqi, K.M.; Sutanto, D.; Zhu, J. Design and Optimization of a Novel Dual-Port Linear Generator for Oceanic Wave Energy Conversion. IEEE Trans. Ind. Electron. 2019, 67, 3409–3418. [Google Scholar] [CrossRef]
- Chau, K.; Zhang, D.; Jiang, J.; Jian, L. Transient analysis of coaxial magnetic gears using finite element comodeling. J. Appl. Phys. 2008, 103, 07F101. [Google Scholar] [CrossRef]
- de Sousa Prado, M.G.; Gardner, F.; Damen, M.; Polinder, H. Modelling and test results of the Archimedes wave swing. Proc. Inst. Mech. Eng. A J. Power Energy 2006, 220, 855–868. [Google Scholar] [CrossRef]
- Farrok, O.; Islam, M.R.; Sheikh, M.R.I.; Guo, Y.; Zhu, J.G. A Split Translator Secondary Stator Permanent Magnet Linear Generator for Oceanic Wave Energy Conversion. IEEE Trans. Ind. Electron. 2018, 65, 7600–7608. [Google Scholar] [CrossRef]
- Eriksson, M.; Isberg, J.; Leijon, M. Hydrodynamic modelling of a direct drive wave energy converter. Int. J. Eng. Sci. 2005, 43, 1377–1387. [Google Scholar] [CrossRef]
- Yu, Y.-H.; Tom, N.; Jenne, D. Numerical analysis on hydraulic power take-off for wave energy converter and power smoothing methods. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Madrid, Spain, 17–22 June 2018; American Society of Mechanical Engineers: New York, NY, USA, 2018; p. V010T09A043. [Google Scholar]
- Pirisi, A.; Mussetta, M.; Gruosso, G.; Zich, R.E. An Optimized Three Phase TPM-LiG for Marine Applications; SPEEDAM 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1712–1717. [Google Scholar]
- Pirisi, A.; Mussetta, M.; Gruosso, G.; Zich, R.E. Optimization of a linear generator for sea-wave energy conversion by means of a hybrid evolutionary algorithm. In Proceedings of the IEEE Congress on Evolutionary Computation, Barcelona, Spain, 18–23 July 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1–6. [Google Scholar]
- Szabo, L.; Oprea, C.; Viorel, I.-A.; Biró, K.Á. Novel permanent magnet tubular linear generator for wave energy converters. In Proceedings of the 2007 IEEE International Electric Machines & Drives Conference, Antalya, Turkey, 3–5 May 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 983–987. [Google Scholar]
- Rao, K.R.; Sunderan, T.; Adiris, M.R.A. Performance and design optimization of two model based wave energy permanent magnet linear generators. Renew. Energy 2017, 101, 196–203. [Google Scholar] [CrossRef]
- Memon, A.H.; bin Ibrahim, T.; Nallagowden, P. Design optimization of linear permanent magnet generator for wave energy conversion. In Proceedings of the 2015 IEEE Conference on Energy Conversion (CENCON), Johor Bahru, Malaysia, 19–20 October 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 315–319. [Google Scholar]
- Wang, J.; Howe, D. Design optimization of radially magnetized, iron-cored, tubular permanent-magnet machines and drive systems. IEEE Trans. Magn. 2004, 40, 3262–3277. [Google Scholar] [CrossRef]
- Fang, H.-w.; Song, R.-n.; Xiao, Z.-x. Optimal design of permanent magnet linear generator and its application in a wave energy conversion system. Energies 2018, 11, 3109. [Google Scholar] [CrossRef]
- Wang, L.; Isberg, J.; Tedeschi, E. Review of control strategies for wave energy conversion systems and their validation: The wave-to-wire approach. Renew. Sustain. Energy Rev. 2018, 81, 366–379. [Google Scholar] [CrossRef]
- Goggins, J.; Finnegan, W. Shape optimisation of floating wave energy converters for a specified wave energy spectrum. Renew. Energy 2014, 71, 208–220. [Google Scholar] [CrossRef]
- Bachynski, E.E.; Young, Y.L.; Yeung, R.W. Analysis and optimization of a tethered wave energy converter in irregular waves. Renew. Energy 2012, 48, 133–145. [Google Scholar] [CrossRef]
- Santana, A.G.; Andrade, D.E.M.; Jaén, A. Control of Hydrodynamic Parameters of Wave Energy Point Absorbers Using Linear Generators and VSC-Based Power Converters Connected to the Grid. In Proceedings of the International 1st Conference on Renewable Energies and Power Quality, Granada, Spain, 23–25 March 2010. [Google Scholar]
- Oh, Y.J.; Park, J.S.; Hyon, B.J.; Lee, J. Novel Control Strategy of Wave Energy Converter Using Linear Permanent Magnet Synchronous Generator. IEEE Trans. Appl. Supercond. 2018, 28, 1–5. [Google Scholar] [CrossRef]
- de la Villa Jaén, A.; Santana, A.G. Considering linear generator copper losses on model predictive control for a point absorber wave energy converter. Energy Convers. Manag. 2014, 78, 173–183. [Google Scholar]
- Wahyudie, A.; Jama, M.; Susilo, T.; Saeed, O.; Nandar, C.; Harib, K. Simple bottom-up hierarchical control strategy for heaving wave energy converters. Int. J. Electr. Power Energy Syst. 2017, 87, 211–221. [Google Scholar] [CrossRef]
- Salter, S.H.; Taylor, J.; Caldwell, N. Power conversion mechanisms for wave energy. Proc. Inst. Mech. Eng. M J. Eng. Marit. Environ. 2002, 216, 1–27. [Google Scholar] [CrossRef]
- Korde, U.A. Control system applications in wave energy conversion. In Proceedings of the OCEANS 2000 MTS/IEEE Conference and Exhibition. Conference Proceedings (Cat. No. 00CH37158), Providence, RI, USA, 11–14 September 2000; IEEE: Piscataway, NJ, USA, 2000; pp. 1817–1824. [Google Scholar]
- de la Villa Jaén, A.; García-Santana, A.; Montoya-Andrade, D.E. Maximizing output power of linear generators for wave energy conversion. Int. Trans. Electr. Energy Syst. 2014, 24, 875–890. [Google Scholar] [CrossRef]
- Hals, J.; Falnes, J.; Moan, T. A comparison of selected strategies for adaptive control of wave energy converters. J. Offshore Mech. Arct. Eng. 2011, 133, 031101. [Google Scholar] [CrossRef]
- Rossiter, J.A. Model-Based Predictive Control: A Practical Approach; CRC Press: Boca Raton, FL, USA, 2003. [Google Scholar]
- Gieske, P. Model Predictive Control of a Wave Energy Converter: Archimedes Wave Swing; Delft University of Technology: Delft, The Netherlands, 2007. [Google Scholar]
- Hals, J.; Falnes, J.; Moan, T. Constrained optimal control of a heaving buoy wave-energy converter. J. Offshore Mech. Arct. Eng. 2011, 133, 011401. [Google Scholar] [CrossRef]
- Brekken, T.K. On Model Predictive Control for a Point Absorber Wave Energy Converter; 2011 IEEE Trondheim PowerTech, 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–8. [Google Scholar]
- Jama, M.; Wahyudie, A.; Assi, A.; Noura, H. In Controlling heaving wave energy converter using function-based model predictive control technique. In Proceedings of the 2013 25th Chinese Control and Decision Conference (CCDC), Guiyang, China, 25–27 May 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 2705–2710. [Google Scholar]
- Cretel, J.A.; Lightbody, G.; Thomas, G.P.; Lewis, A.W. Maximisation of energy capture by a wave-energy point absorber using model predictive control. IFAC Proc. Vol. 2011, 44, 3714–3721. [Google Scholar] [CrossRef]
- Richter, M. Different Model Predictive Control Approaches for Controlling Point Absorber Wave Energy Converters. Diploma Thesis, University Stuttgart, Stuttgart, Germany, 2011. [Google Scholar]
- Li, G.; Belmont, M.R. Model predictive control of sea wave energy converters–Part I: A convex approach for the case of a single device. Renew. Energy 2014, 69, 453–463. [Google Scholar] [CrossRef]
- Richter, M.; Magana, M.E.; Sawodny, O.; Brekken, T.K. Nonlinear model predictive control of a point absorber wave energy converter. IEEE Trans. Sustain. Energy 2012, 4, 118–126. [Google Scholar] [CrossRef]
- Tom, N.; Yeung, R.W. Nonlinear model predictive control applied to a generic ocean-wave energy extractor. J. Offshore Mech. Arct. Eng. 2014, 136, 041901. [Google Scholar] [CrossRef]
- Abraham, E.; Kerrigan, E.C. Optimal active control and optimization of a wave energy converter. IEEE Trans. Sustain. Energy 2012, 4, 324–332. [Google Scholar] [CrossRef]
- Tom, N.; Yeung, R.W. Experimental confirmation of nonlinear-model-predictive control applied offline to a permanent magnet linear generator for ocean-wave energy conversion. IEEE J. Ocean. Eng. 2015, 41, 281–295. [Google Scholar]
- Ferri, F. Wave-to-wire modelling of wave energy converters: Critical assessment, developments and applicability for economical optimisation; River Publishers: Aalborg, Denmark, 2014. [Google Scholar]
- Li, B.; Macpherson, D.; Shek, J. Direct Drive Wave Energy Converter Control in Irregular Waves; IET: London, UK, 2011. [Google Scholar]
- Annuar, A.; Macpherson, D.; Forehand, D.; Mueller, M. Optimum power control for arrays of direct drive wave energy converters. In Proceedings of the IET International Conference on Power Electronics, Machines and Drives 2012 (PEMD 2012), Bristol, UK, 27–29 March 2012; IET: London, UK, 2012. [Google Scholar]
- Marei, M.I.; Mokhtar, M.; El-Sattar, A.A. MPPT strategy based on speed control for AWS-based wave energy conversion system. Renew. Energy 2015, 83, 305–317. [Google Scholar] [CrossRef]
- Shek, J.; Macpherson, D.; Mueller, M. Experimental verification of linear generator control for direct drive wave energy conversion. IET Renew. Power Gener. 2010, 4, 395–403. [Google Scholar] [CrossRef]
- Cheung, J.T. Frictionless Linear Electrical Generator for Harvesting Motion Energy; Rockwell International: Thousand Oaks, CA, USA, 2004. [Google Scholar]
- Eriksson, S. Design of permanent-magnet linear generators with constant-torque-angle control for wave power. Energies 2019, 12, 1312. [Google Scholar] [CrossRef]
- Amon, E.A.; Schacher, A.A.; Brekken, T.K. A novel maximum power point tracking algorithm for ocean wave energy devices. In Proceedings of the 2009 IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 2635–2641. [Google Scholar]
- Brooking, P.; Mueller, M. Power conditioning of the output from a linear vernier hybrid permanent magnet generator for use in direct drive wave energy converters. IEE Proc.-Gener. Transm. Distrib. 2005, 152, 673–681. [Google Scholar] [CrossRef]
- Ozkop, E.; Altas, I.H. Control, power and electrical components in wave energy conversion systems: A review of the technologies. Renew. Sustain. Energy Rev. 2017, 67, 106–115. [Google Scholar] [CrossRef]
- Bostrom, C.; Waters, R.; Lejerskog, E.; Svensson, O.; Stalberg, M.; Stromstedt, E.; Leijon, M. Study of a wave energy converter connected to a nonlinear load. IEEE J. Ocean. Eng. 2009, 34, 123–127. [Google Scholar] [CrossRef]
- Ekström, R.; Ekergård, B.; Leijon, M. Electrical damping of linear generators for wave energy converters—A review. Renew. Sustain. Energy Rev. 2015, 42, 116–128. [Google Scholar] [CrossRef]
- Farrok, O.; Islam, M.R.; Sheikh, M.R.I.; Guo, Y.; Zhu, J.G. Design and analysis of a novel lightweight translator permanent magnet linear generator for oceanic wave energy conversion. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Xia, T.; Yu, H.; Chen, Z.; Huang, L.; Liu, X.; Hu, M. Design and analysis of a field-modulated tubular linear permanent magnet generator for direct-drive wave energy conversion. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Wang, D.; Shao, C.; Wang, X. Design and performance evaluation of a tubular linear switched reluctance generator with low cost and high thrust density. IEEE Trans. Appl. Supercond. 2016, 26, 1–5. [Google Scholar] [CrossRef]
- Lejerskog, E.; Leijon, M. Detailed study of closed stator slots for a direct-driven synchronous permanent magnet linear wave energy converter. Machines 2014, 2, 73–86. [Google Scholar] [CrossRef]
- Huang, L.; Chen, M.; Wang, L.; Yue, F.; Guo, R.; Fu, X. Analysis of a hybrid field-modulated linear generator for wave energy conversion. IEEE Trans. Appl. Supercond. 2018, 28, 1–5. [Google Scholar] [CrossRef]
- Huang, L.; Liu, J.; Yu, H.; Qu, R.; Chen, H.; Fang, H. Winding configuration and performance investigations of a tubular superconducting flux-switching linear generator. IEEE Trans. Appl. Supercond. 2014, 25, 1–5. [Google Scholar] [CrossRef]
- Antipov, V.; Grozov, A.; Ivanova, A. A linear synchronous generator with a power of 30 kW for wave-power engineering. Russ. Electr. Eng. 2017, 88, 55–60. [Google Scholar] [CrossRef]
- Niu, X. Modeling and Design Analysis of a Permanent Magnet Linear Synchronous Generator; University of Illinois at Urbana-Champaign: Champaign, IL, USA, 2013. [Google Scholar]
- Almoraya, A.; Baker, N.; Smith, K.; Raihan, M. Development of a double-sided consequent pole linear vernier hybrid permanent-magnet machine for wave energy converters. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–7. [Google Scholar]
- Sun, Z.; Cheung, N.; Zhao, S.; Lu, Y.; Shi, Z. Design and simulation of a linear switched reluctance generator for wave energy conversion. In Proceedings of the 4th International Conference on Power Electronics Systems and Applications, Hong Kong, China, 8–10 June 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–5. [Google Scholar]
- Mendes, R.; Calado, M.; Mariano, S. Particle swarm and Box׳ s complex optimization methods to design linear tubular switched reluctance generators for wave energy conversion. Swarm Evol. Comput. 2016, 28, 29–41. [Google Scholar] [CrossRef]
- Elwood, D.; Yim, S.C.; Prudell, J.; Stillinger, C.; Von Jouanne, A.; Brekken, T.; Brown, A.; Paasch, R. Design, construction, and ocean testing of a taut-moored dual-body wave energy converter with a linear generator power take-off. Renew. Energy 2010, 35, 348–354. [Google Scholar] [CrossRef]
- Prado, M.; Polinder, H. Direct Drive in Wave Energy Conversion—AWS Full Scale Prototype Case Study. In Proceedings of the IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–7. [Google Scholar]
- Kim, J.; Koh, H.; Cho, I.; Kim, M.; Kweon, H. Experimental study of wave energy extraction by a dual-buoy heaving system. Int. J. Nav. Archit. Ocean Eng. 2017, 9, 25–34. [Google Scholar] [CrossRef]
- Vining, J.; Mundon, T.; Nair, B. Electromechanical design and experimental evaluation of a double-sided, dual airgap linear vernier generator for wave energy conversion. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 5557–5564. [Google Scholar]
- Elwood, D.; Schacher, A.; Rhinefrank, K.; Prudell, J.; Yim, S.; Amon, E.; Brekken, T.; von Jouanne, A. Numerical modeling and ocean testing of a direct-drive wave energy device utilizing a permanent magnet linear generator for power take-off. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Honolulu, HI, USA, 31 May–5 June 2009; pp. 817–824. [Google Scholar]
- Hong, Y.; Eriksson, M.; Castellucci, V.; Boström, C.; Waters, R. Linear generator-based wave energy converter model with experimental verification and three loading strategies. IET Renew. Power Gener. 2016, 10, 349–359. [Google Scholar] [CrossRef]
- Xia, T.; Yu, H.; Guo, R.; Liu, X. Research on the field-modulated tubular linear generator with quasi-halbach magnetization for ocean wave energy conversion. IEEE Trans. Appl. Supercond. 2018, 28, 1–5. [Google Scholar] [CrossRef]
- Feng, N.; Yu, H.; Hu, M.; Liu, C.; Huang, L.; Shi, Z. A study on a linear magnetic-geared interior permanent magnet generator for direct-drive wave energy conversion. Energies 2016, 9, 487. [Google Scholar] [CrossRef]
- Son, D.; Yeung, R.W. Real-time implementation and validation of optimal damping control for a permanent-magnet linear generator in wave energy extraction. Appl. Energy 2017, 208, 571–579. [Google Scholar] [CrossRef]
- Du, Y.; Cheng, M.; Chau, K.T.; Liu, X.; Xiao, F.; Zhao, W. Linear primary permanent magnet vernier machine for wave energy conversion. IET Electr. Power Appl. 2015, 9, 203–212. [Google Scholar] [CrossRef]
- Huang, L.; Yu, H.; Hu, M.; Zhao, J.; Cheng, Z. A novel flux-switching permanent-magnet linear generator for wave energy extraction application. IEEE Trans. Magn. 2011, 47, 1034–1037. [Google Scholar] [CrossRef]
- Pan, J.; Li, Q.; Wu, X.; Cheung, N.; Qiu, L. Complementary power generation of double linear switched reluctance generators for wave power exploitation. Int. J. Electr. Power Energy Syst. 2019, 106, 33–44. [Google Scholar] [CrossRef]
- Pan, J.; Zou, Y.; Cheung, N.; Cao, G.-z. On the voltage ripple reduction control of the linear switched reluctance generator for wave energy utilization. IEEE Trans. Power Electron. 2013, 29, 5298–5307. [Google Scholar] [CrossRef]
- Mendes, R.; Calado, M.; Mariano, S. Electromagnetic design method for a TLSRG with application in ocean wave energy conversion. Int. J. Electr. Power Energy Syst. 2020, 121, 106097. [Google Scholar] [CrossRef]
- Huang, L.; Hu, B.; Hu, M.; Liu, C.; Zhu, H. Research on primary excitation fully superconducting linear generators for wave energy conversion. IEEE Trans. Appl. Supercond. 2019, 29, 1–5. [Google Scholar] [CrossRef]
- Leijon, M.; Bernhoff, H.; Agren, O.; Isberg, J.; Sundberg, J.; Berg, M.; Karlsson, K.E.; Wolfbrandt, A. Multiphysics simulation of wave energy to electric energy conversion by permanent magnet linear generator. IEEE Trans. Energy Convers. 2005, 20, 219–224. [Google Scholar] [CrossRef]
- Feng, N.; Yu, H.; Zhao, M.; Zhang, P.; Hou, D. Magnetic field-modulated linear permanent-magnet generator for direct-drive wave energy conversion. IET Electr. Power Appl. 2020, 14, 742–750. [Google Scholar] [CrossRef]
- Kracht, P.; Perez-Becker, S.; Richard, J.-B.; Fischer, B. Performance improvement of a point absorber wave energy converter by application of an observer-based control: Results from wave tank testing. IEEE Trans. Ind. Appl. 2015, 51, 3426–3434. [Google Scholar] [CrossRef]
- Penalba, M.; Davidson, J.; Windt, C.; Ringwood, J.V. A high-fidelity wave-to-wire simulation platform for wave energy converters: Coupled numerical wave tank and power take-off models. Appl. Energy 2018, 226, 655–669. [Google Scholar] [CrossRef]
- Antonio, F.D.O. Wave energy utilization: A review of the technologies. Renew. Sustain. Energy Rev. 2010, 14, 899–918. [Google Scholar]
- Joubert, J.R.; van Niekerk, J.L.; Reinecke, J.; Meyer, I. Wave Energy Converters (WECs); CRSES: Matieland, South Africa, 2013. [Google Scholar]
- Czech, B.; Bauer, P. Wave energy converter concepts: Design challenges and classification. IEEE Ind. Electron. Mag. 2012, 6, 4–16. [Google Scholar] [CrossRef]
- Pecher, A.; Peter Kofoed, J. Handbook of Ocean Wave Energy; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Qiao, D.; Haider, R.; Yan, J.; Ning, D.; Li, B. Review of Wave Energy Converter and Design of Mooring System. Sustainability 2020, 12, 8251. [Google Scholar] [CrossRef]
- Aderinto, T.; Li, H. Ocean wave energy converters: Status and challenges. Energies 2018, 11, 1250. [Google Scholar] [CrossRef]
- Piscopo, V.; Benassai, G.; Della Morte, R.; Scamardella, A. Cost-based design and selection of point absorber devices for the mediterranean sea. Energies 2018, 11, 946. [Google Scholar] [CrossRef]
- Clément, A.; McCullen, P.; Falcão, A.; Fiorentino, A.; Gardner, F.; Hammarlund, K.; Lemonis, G.; Lewis, T.; Nielsen, K.; Petroncini, S. Wave energy in Europe: Current status and perspectives. Renew. Sustain. Energy Rev. 2002, 6, 405–431. [Google Scholar] [CrossRef]
- Ibrahim, H.; Ilinca, A.; Perron, J. Energy storage systems—Characteristics and comparisons. Renew. Sustain. Energy Rev. 2008, 12, 1221–1250. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structure | Parameters and S.I. Units |
|---|---|
| Linear generator | Pole width (m), Pole pitch, Number of poles, Air gap magnetic flux density (T), Air gap (m), Number of turns, Number of slots, Width of a stator tooth (m), Teeth thickness (m), Width of the stator stack (m), Translator iron thickness (m), Length of the generator (m), Resistance of the coil (Ω), Circuit resistance (Ω), Load resistance (Ω), Number of phases, Mass of the magnets (kg), Load angle (rad) |
| Buoy | Wave period (s), Wave height (m), Mass of the buoy (kg), Diameter of the buoy (m), Height of the buoy (m), Density of the seawater (kg/m3) |
| Modification | Magnetic Flux Density | Efficiency | Cogging Force | Structure | Load Angle |
|---|---|---|---|---|---|
| Optimised reduction of PM length [68] | Reduced | Increased | Reduced by 80% | Stator length was increased | Increased |
| PMs attached inside diameter of the translator [27] | ND | ND | Reduced | Increased complexity | ND |
| Using larger magnet size [74] | Increased | Increased | ND | Load angle overall size and magnetic coupling were reduced | Increased PM cost |
| Magnet shape (rectangular shapes) [74] | Increased | ND | ND | ND | Reduced |
| Radial PMs [69] | Reduced | ND | Reduced by 70% | ND | ND |
| Using Halbach arrays [44] | Increased | Increased | Reduced | Increased complexity | ND |
| Using quasi-Halbach array [42] | Increased | Increased | Reduced | Increased the difficulty of manufacturing magnets | ND |
| High-grade PM [79] | Increased | Increased | Reduced | Increased cost | ND |
| Skewing the PMs [69] | ND | Reduced | Reduced | ND | ND |
| PMs pole shifting [76] | ND | Unbalance voltage | Reduced | Increased cost | ND |
| PMs with bevelled bottom-side shape [68] | ND | ND | Reduced | Increased complexity | ND |
| Modification | Increases | Reduces |
|---|---|---|
| Increasing the air gap [72] | ND |
|
| Variable air gap [81] |
|
|
| Modification | Cogging Force | Efficiency | Iron Loss | Cost |
|---|---|---|---|---|
| Increasing stator tooth width [74] | ND | ND | ||
| Slotless Stator [85] | ND | |||
| Semi-closed slots [69] | by 34% | |||
| Optimised bulged stator [72] | ND | ND | ||
| Assistant tooth [83] | by 70% | ND | ND | |
| Shoe concept [84] | ND | ND | ||
| Stator consists of permanent magnets, winding coils and spring [86] | ND | ND |
| Type | References | |
|---|---|---|
| Simulation | [5,17,34,35,50,55,59,77,84,111,114,120,150,151,152,153,154,155,156,157,158,159,160] | |
| Experiment | Ocean test | [9,65,91,104,161,162] |
| Wave tank test | [163] | |
| Test rig test | [37,38,90,146,164] | |
| Validation (Sim./Exp) | Ocean test | [165,166] |
| Wave tank test | [6,42,78,86,167,168,169] | |
| Test rig test | [33,36,44,45,52,72,83,92,93,170,171,172,173,174,175] | |
| References | Deployed Place and Year | Location | Rated Power |
|---|---|---|---|
| [8] | Sweden (2002) | Offshore | 10 kW |
| [180] | Portugal (2004) | Offshore | 2 MW |
| [26] | USA (2008) | Offshore | 10 kW |
| [181] | UK (2008) | Nearshore | 100 MW |
| [1] | USA (2011) | Offshore | 1 MW |
| [181] | Sweden (2015) | Offshore | 1 MW |
| [1] | Germany | Offshore | 1 MW |
| [1] | Russia | Offshore | 50 kW |
| Advantages | Disadvantages |
|---|---|
| Does not require an intermediate mechanical interface | Power transmission system is very complicated due to the unequal generated voltage created by the irregular wave motion |
| Reduces maintenance cost | Velocity of the translator is much lower than conventional rotary generators |
| Relatively highly efficient | Low power-to-weight ratio |
| Possibility of continuous force control | Needs heavy structure due to the attractive forces between the stator and the translator |
| Item | Material | Current Unit Cost | Unit Cost Range |
|---|---|---|---|
| Permanent magnets (PMs) | Neodymium–iron–Boron | 96 USD/kg | 72–120 USD/kg |
| Stator | Electrical steel | 2.5 USD/kg | 2–3 USD/kg |
| Translator | Electrical steel | 2.5 USD/kg | 2–3 USD/kg |
| Rim | Aluminium alloy | 6 USD/kg | 4.5–7.5 USD/kg |
| Winding coil | Copper coil | 1 USD/m | 0.5–1.5 USD/m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahamed, R.; McKee, K.; Howard, I. A Review of the Linear Generator Type of Wave Energy Converters’ Power Take-Off Systems. Sustainability 2022, 14, 9936. https://doi.org/10.3390/su14169936
Ahamed R, McKee K, Howard I. A Review of the Linear Generator Type of Wave Energy Converters’ Power Take-Off Systems. Sustainability. 2022; 14(16):9936. https://doi.org/10.3390/su14169936
Chicago/Turabian StyleAhamed, Raju, Kristoffer McKee, and Ian Howard. 2022. "A Review of the Linear Generator Type of Wave Energy Converters’ Power Take-Off Systems" Sustainability 14, no. 16: 9936. https://doi.org/10.3390/su14169936
APA StyleAhamed, R., McKee, K., & Howard, I. (2022). A Review of the Linear Generator Type of Wave Energy Converters’ Power Take-Off Systems. Sustainability, 14(16), 9936. https://doi.org/10.3390/su14169936