
A Fuzzy-Logic Approach Based on Driver Decision-Making Behavior Modeling and Simulation


 ,
,  and
and
Abstract
:1. Introduction
2. Background and Related Works
2.1. Aggressive Driving
2.2. Recognizing Driver’s Intention
2.3. Aggressive Driving Behavior Prediction
2.4. Using Fuzzy Logic for Driver Behavior
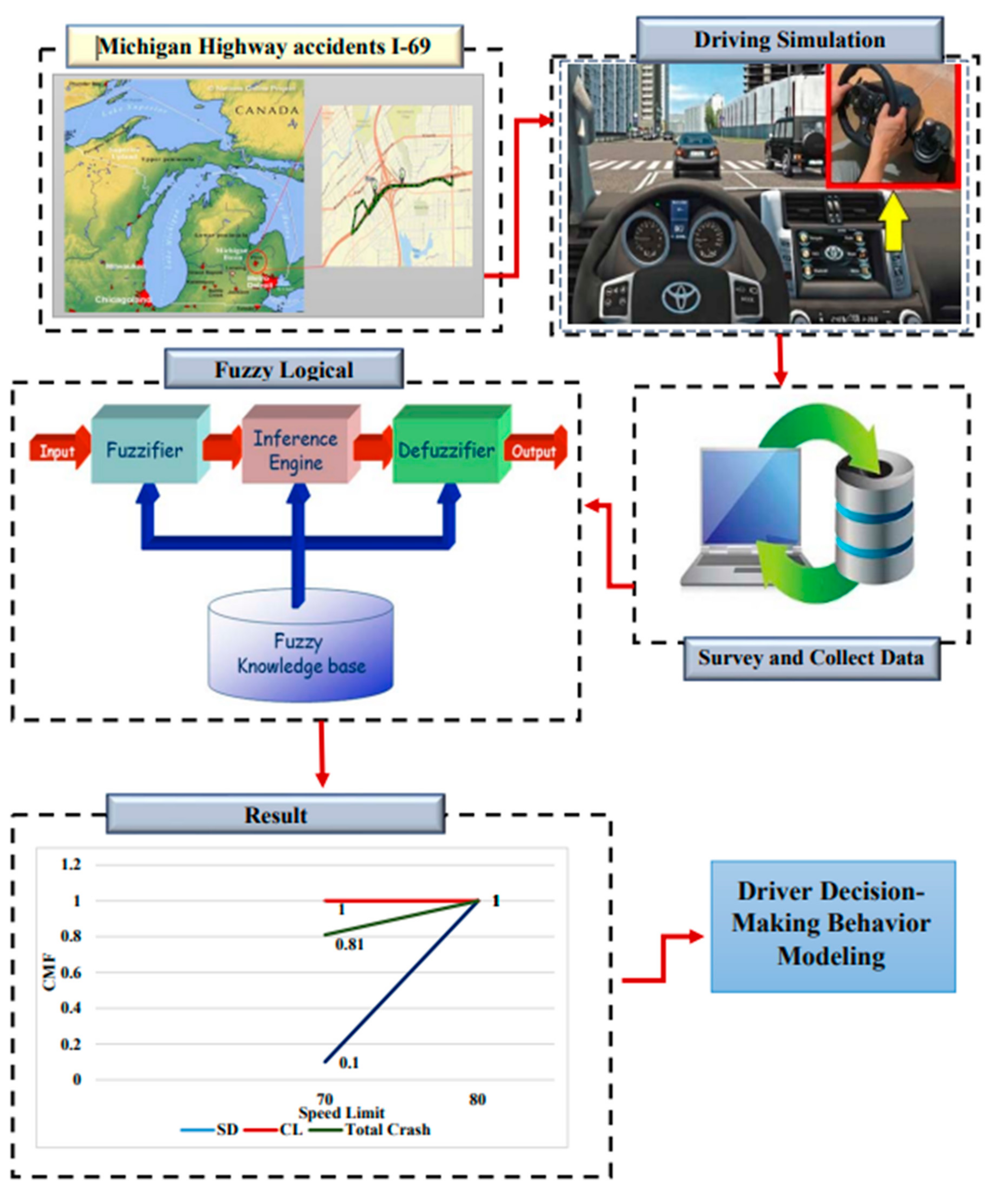
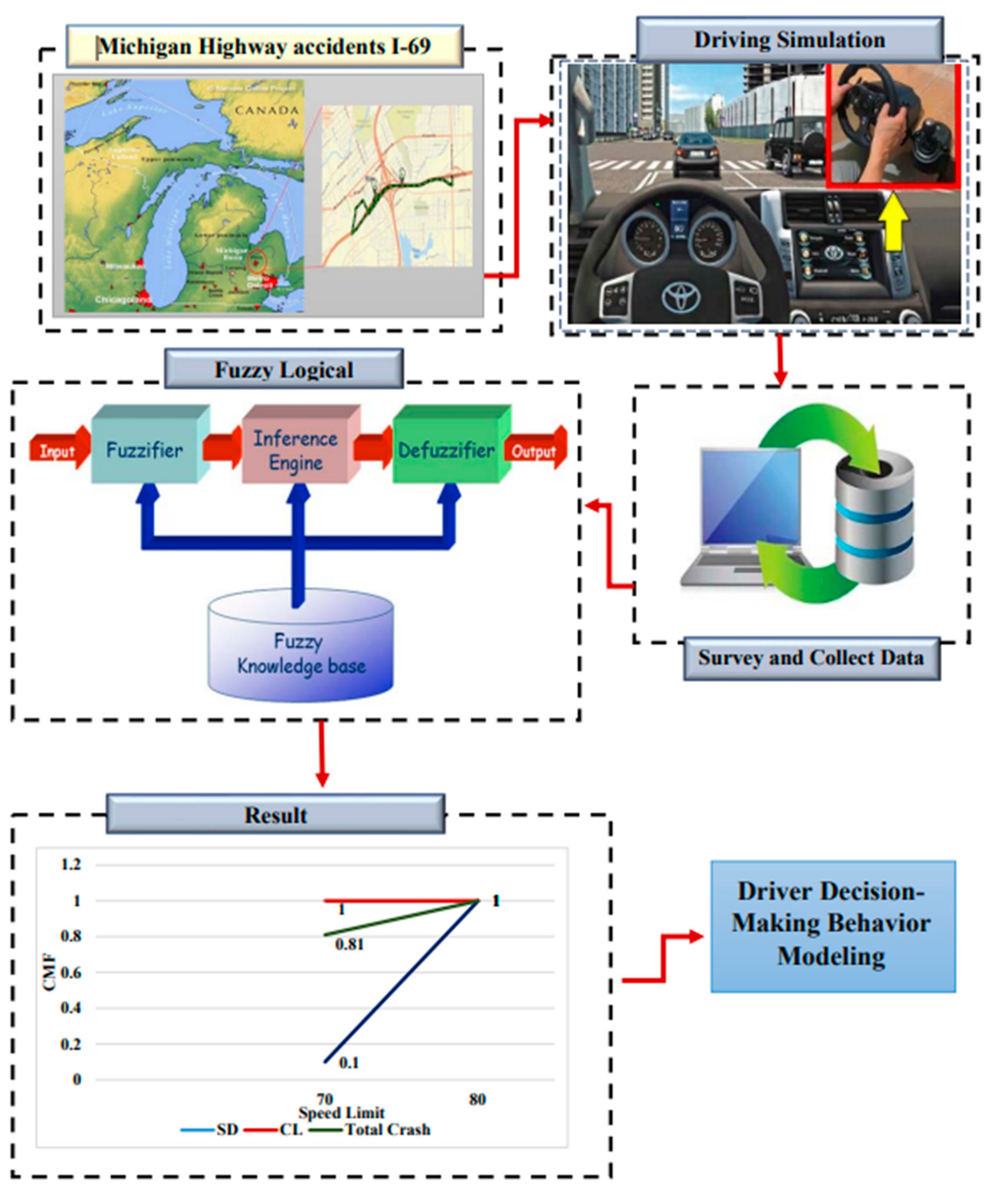
3. Materials and Methods
3.1. Data Collection
3.2. Simulation
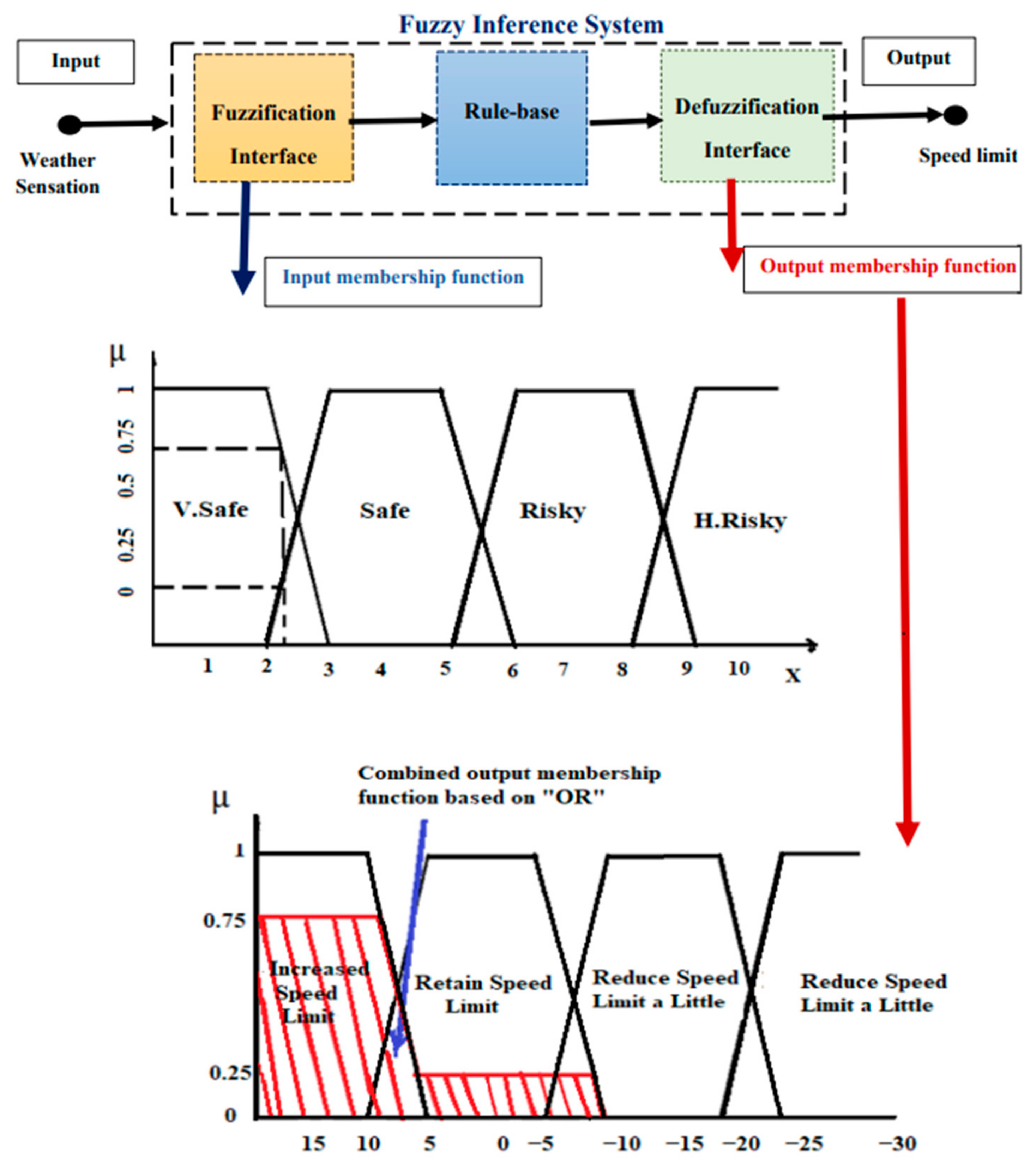
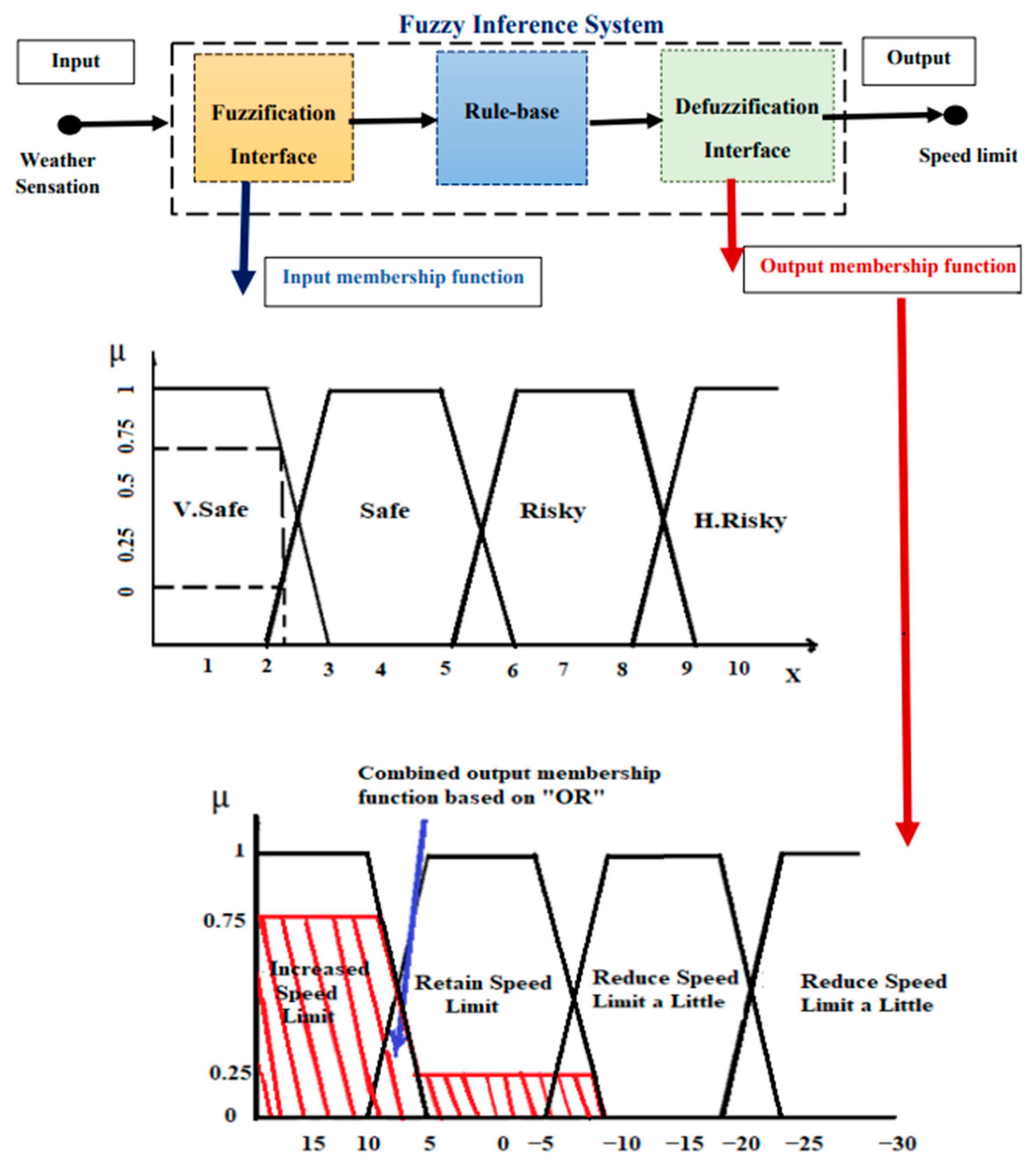
3.3. Short Description of the Fuzzy Inference System
- ✓
- Fuzzification
- ✓
- Fuzzy inference process (Aggregation of the Rule Outputs)
- ✓
- Defuzzification
- I.
- LOM (largest of maximum), MOM (middle of maximum) methods
- II.
- Center of Gravity method
- III.
- Crash Modification Factors (CMFs) from Driving Simulator Studies
- Before–After evaluations of performed Studies
4. Results and Discussion
4.1. Descriptive Statistic
4.2. Description of the Fuzzy Logic Car-Following Model
4.3. Defuzzification Values and Output for Each Scenario
4.4. Development of Crash Modification Factors (CMFs) from Driving Simulator Studies
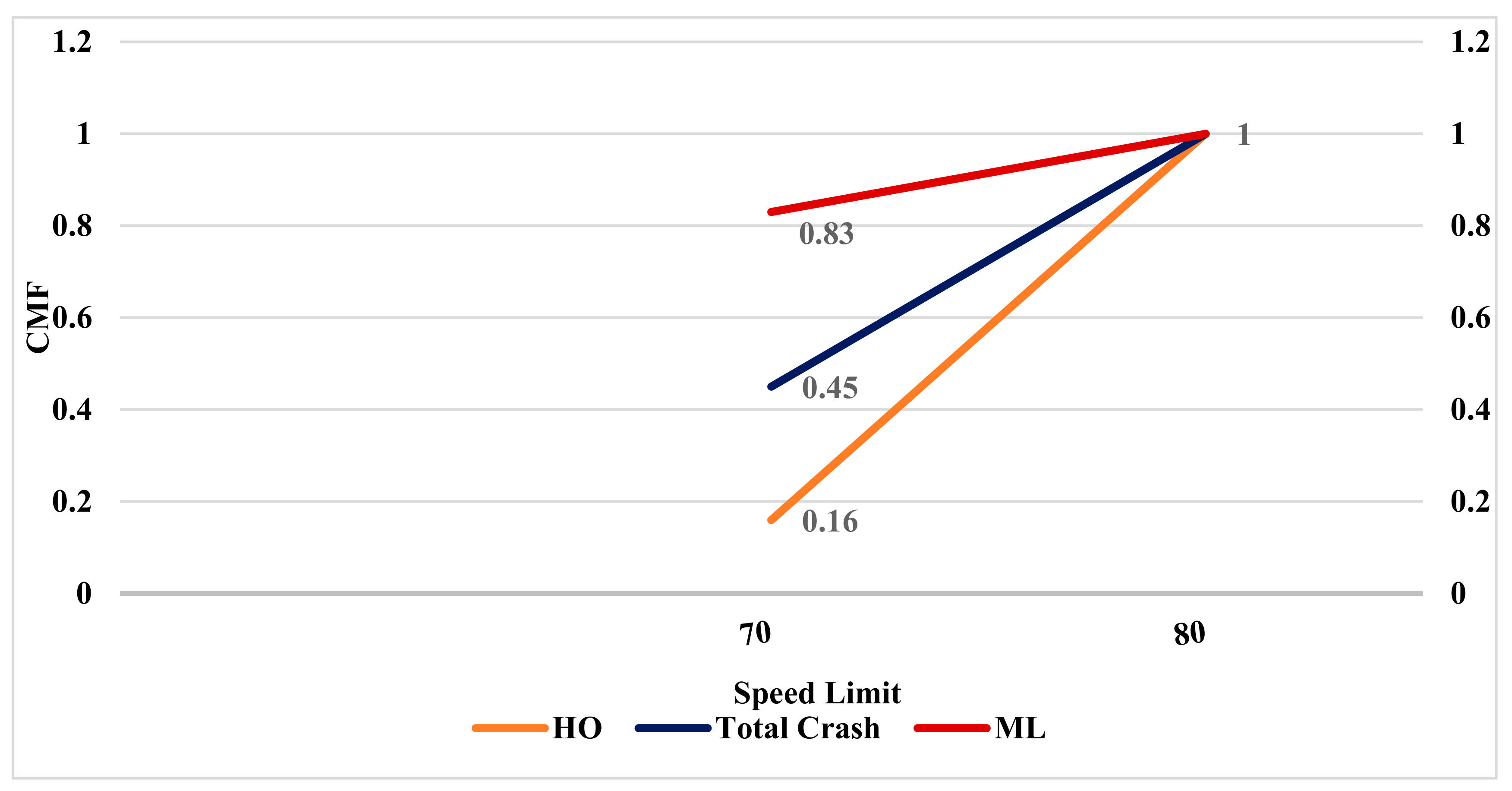
4.4.1. Install Speed Limit in Clear Weather/Dry Road Conditions
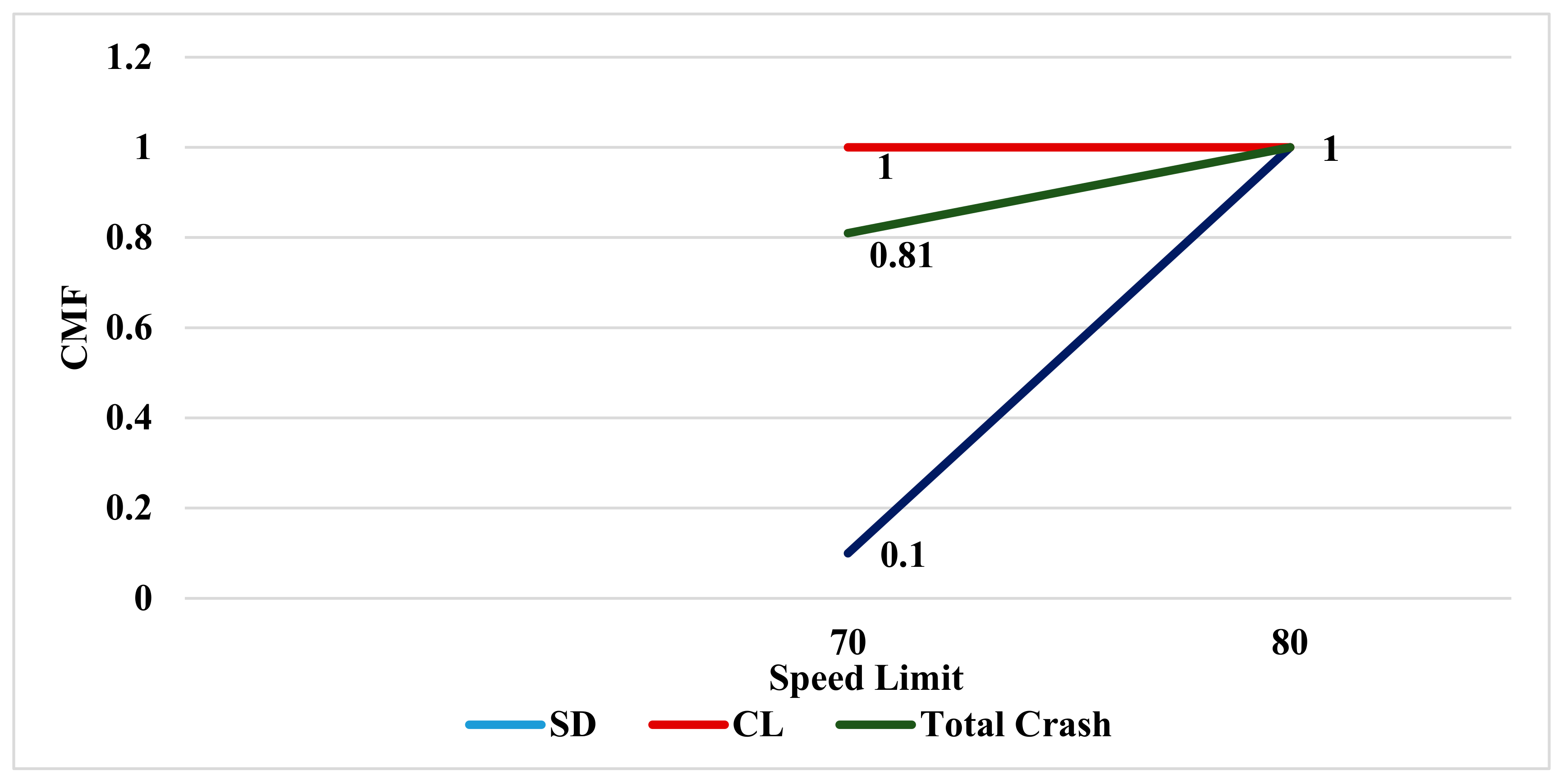
4.4.2. Install Speed Limit for Rain Weather/Wet Road Condition
4.4.3. Install Speed Limit in Snow Weather/Snow Road Condition
4.4.4. Install Speed Limit in Snow Weather/Icy Road Conditions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Feraud, I.S.; Naranjo, J.E. Are You a Good Driver? A Data-Driven Approach to Estimate Driving Style. In Proceedings of the 11th International Conference on Computer Modeling and Simulation, New York, NY, USA, 16–19 January 2019; pp. 3–7. [Google Scholar]
- Petridou, E.; Moustaki, M. Human Factors in the Causation of Road Traffic Crashes. Eur. J. Epidemiol. 2000, 16, 819–826. [Google Scholar] [CrossRef] [PubMed]
- Driving, A. Research Update; AAA Foundation for Traffic Safety: Washington, DC, USA, 2009. [Google Scholar]
- Tasca, L. A Review of the Literature on Aggressive Driving Research; Citeseer: Princeton, NJ, USA, 2000. [Google Scholar]
- Safdar, M.; Jamal, A.; Al-Ahmadi, H.M.; Rahman, M.T.; Almoshaogeh, M. Analysis of the Influential Factors towards Adoption of Car-Sharing: A Case Study of a Megacity in a Developing Country. Sustainability 2022, 14, 2778. [Google Scholar] [CrossRef]
- Wang, Z.; Safdar, M.; Zhong, S.; Liu, J.; Xiao, F. Public Preferences of Shared Autonomous Vehicles in Developing Countries: A Cross-National Study of Pakistan and China. J. Adv. Transp. 2021, 2021, 5141798. [Google Scholar] [CrossRef]
- Meiring, G.A.M.; Myburgh, H.C. A Review of Intelligent Driving Style Analysis Systems and Related Artificial Intelligence Algorithms. Sensors 2015, 15, 30653–30682. [Google Scholar] [CrossRef] [PubMed]
- Johnson, D.A.; Trivedi, M.M. Driving Style Recognition Using a Smartphone as a Sensor Platform. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 1609–1615. [Google Scholar]
- Jamal, A.; Rahman, M.T.; Al-Ahmadi, H.M.; Mansoor, U. The Dilemma of Road Safety in the Eastern Province of Saudi Arabia: Consequences and Prevention Strategies. Int. J. Environ. Res. Public Health 2020, 17, 157. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sagberg, F.; Selpi; Bianchi Piccinini, G.F.; Engström, J. A Review of Research on Driving Styles and Road Safety. Hum. Factors 2015, 57, 1248–1275. [Google Scholar] [CrossRef]
- Harris, P.B.; Houston, J.M.; Vazquez, J.A.; Smither, J.A.; Harms, A.; Dahlke, J.A.; Sachau, D.A. The Prosocial and Aggressive Driving Inventory (PADI): A Self-Report Measure of Safe and Unsafe Driving Behaviors. Accid. Anal. Prev. 2014, 72, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Houston, J.M.; Harris, P. The Aggressive Driving Behavior Scale: Developing a Self-Report Measure of Unsafe Driving Practices. N. Am. J. Psychol. 2003, 5, 193–202. [Google Scholar]
- Dula, C.S.; Ballard, M.E. Development and Evaluation of a Measure of Dangerous, Aggressive, Negative Emotional, and Risky Driving 1. J. Appl. Soc. Psychol. 2003, 33, 263–282. [Google Scholar] [CrossRef]
- Krahé, B.; Fenske, I. Predicting Aggressive Driving Behavior: The Role of Macho Personality, Age, and Power of Car. Aggress. Behav. Off. J. Int. Soc. Res. Aggress. 2002, 28, 21–29. [Google Scholar] [CrossRef]
- Ullah, I.; Liu, K.; Yamamoto, T.; Zahid, M.; Jamal, A. Prediction of Electric Vehicle Charging Duration Time Using Ensemble Machine Learning Algorithm and Shapley Additive Explanations. Int. J. Energy Res. 2022, in press. [CrossRef]
- Ullah, I.; Liu, K.; Yamamoto, T.; Al Mamlook, R.E.; Jamal, A. A Comparative Performance of Machine Learning Algorithm to Predict Electric Vehicles Energy Consumption: A Path towards Sustainability. Energy Environ. 2021, 0958305X211044998. [Google Scholar] [CrossRef]
- Ali Aden, W.; Zheng, J.; Ullah, I.; Safdar, M. Public Preferences Towards Car Sharing Service: The Case of Djibouti. Front. Environ. Sci. 2022, 10, 889453. [Google Scholar] [CrossRef]
- Aljaafreh, A.; Alshabatat, N.; Al-Din, M.S.N. Driving Style Recognition Using Fuzzy Logic. In Proceedings of the 2012 IEEE International Conference on Vehicular Electronics and Safety (ICVES 2012), Istanbul, Turkey, 24–27 July 2012; pp. 460–463. [Google Scholar]
- WÅhlberg, A.A. Driver Behaviour and Accident Research Methodology: Unresolved Problems; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Jamal, A.; Umer, W. Exploring the Injury Severity Risk Factors in Fatal Crashes with Neural Network. Int. J. Environ. Res. Public Health 2020, 17, 7466. [Google Scholar] [CrossRef] [PubMed]
- Jamal, A.; Zahid, M.; Tauhidur Rahman, M.; Al-Ahmadi, H.M.; Almoshaogeh, M.; Farooq, D.; Ahmad, M. Injury Severity Prediction of Traffic Crashes with Ensemble Machine Learning Techniques: A Comparative Study. Int. J. Inj. Control. Saf. Promot. 2021, 28, 408–427. [Google Scholar] [CrossRef]
- Wang, W.; Xi, J. A Rapid Pattern-Recognition Method for Driving Styles Using Clustering-Based Support Vector Machines. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 5270–5275. [Google Scholar]
- Feng, Y.; Pickering, S.; Chappell, E.; Iravani, P.; Brace, C. A Support Vector Clustering Based Approach for Driving Style Classification. Int. J. Mach. Learn. Comput. 2019, 9, 344–350. [Google Scholar] [CrossRef] [Green Version]
- Li, G.; Chen, Y.; Cao, D.; Qu, X.; Cheng, B.; Li, K. Extraction of Descriptive Driving Patterns from Driving Data Using Unsupervised Algorithms. Mech. Syst. Signal Process. 2021, 156, 107589. [Google Scholar] [CrossRef]
- Li, G.; Li, S.E.; Cheng, B.; Green, P. Estimation of Driving Style in Naturalistic Highway Traffic Using Maneuver Transition Probabilities. Transp. Res. Part C Emerg. Technol. 2017, 74, 113–125. [Google Scholar] [CrossRef]
- Tulusan, J.; Staake, T.; Fleisch, E. Providing Eco-Driving Feedback to Corporate Car Drivers: What Impact Does a Smartphone Application Have on Their Fuel Efficiency? In Proceedings of the 2012 ACM Conference on Ubiquitous Computing, Pittsburgh, PA, USA, 5–8 September 2012; pp. 212–215. [Google Scholar]
- Staubach, M.; Schebitz, N.; Köster, F.; Kuck, D. Evaluation of an Eco-Driving Support System. Transp. Res. Part F Traffic Psychol. Behav. 2014, 27, 11–21. [Google Scholar] [CrossRef]
- Sullman, M.J.; Dorn, L.; Niemi, P. Eco-Driving Training of Professional Bus Drivers—Does It Work? Transp. Res. Part C Emerg. Technol. 2015, 58, 749–759. [Google Scholar] [CrossRef]
- Deffenbacher, J.L.; Oetting, E.R.; Lynch, R.S. Development of a Driving Anger Scale. Psychol. Rep. 1994, 74, 83–91. [Google Scholar] [CrossRef] [PubMed]
- De Winter, J.C.; Dodou, D. The Driver Behaviour Questionnaire as a Predictor of Accidents: A Meta-Analysis. J. Saf. Res. 2010, 41, 463–470. [Google Scholar] [CrossRef] [PubMed]
- Amado, S.; Arıkan, E.; Kaça, G.; Koyuncu, M.; Turkan, B.N. How Accurately Do Drivers Evaluate Their Own Driving Behavior? An on-Road Observational Study. Accid. Anal. Prev. 2014, 63, 65–73. [Google Scholar] [CrossRef]
- Osafune, T.; Takahashi, T.; Kiyama, N.; Sobue, T.; Yamaguchi, H.; Higashino, T. Analysis of Accident Risks from Driving Behaviors. Int. J. Intell. Transp. Syst. Res. 2017, 15, 192–202. [Google Scholar] [CrossRef]
- Koh, D.-W.; Kang, H.-B. Smartphone-Based Modeling and Detection of Aggressiveness Reactions in Senior Drivers. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Korea, 28 June–1 July 2015; pp. 12–17. [Google Scholar]
- Hong, J.-H.; Margines, B.; Dey, A.K. A Smartphone-Based Sensing Platform to Model Aggressive Driving Behaviors. In Proceedings of the Sigchi Conference on Human Factors in Computing Systems, Toronto, ON, Canada, 26 April–1 May 2014; pp. 4047–4056. [Google Scholar]
- Yoshitake, H.; Shino, M. Risk Assessment Based on Driving Behavior for Preventing Collisions with Pedestrians When Making Across-Traffic Turns at Intersections. IATSS Res. 2018, 42, 240–247. [Google Scholar] [CrossRef]
- Af Wåhlberg, A.E. The Relation of Acceleration Force to Traffic Accident Frequency: A Pilot Study. Transp. Res. Part F Traffic Psychol. Behav. 2000, 3, 29–38. [Google Scholar] [CrossRef]
- Xu, W.; Wang, J.; Fu, T.; Gong, H.; Sobhani, A. Aggressive Driving Behavior Prediction Considering Driver’s Intention Based on Multivariate-Temporal Feature Data. Accid. Anal. Prev. 2022, 164, 106477. [Google Scholar] [CrossRef]
- Karlaftis, M.G.; Vlahogianni, E.I. Memory Properties and Fractional Integration in Transportation Time-Series. Transp. Res. Part C Emerg. Technol. 2009, 17, 444–453. [Google Scholar] [CrossRef]
- Zhong, M.; Lingras, P.; Sharma, S. Estimation of Missing Traffic Counts Using Factor, Genetic, Neural, and Regression Techniques. Transp. Res. Part C Emerg. Technol. 2004, 12, 139–166. [Google Scholar] [CrossRef]
- Van Der Voort, M.; Dougherty, M.; Watson, S. Combining Kohonen Maps with ARIMA Time Series Models to Forecast Traffic Flow. Transp. Res. Part C Emerg. Technol. 1996, 4, 307–318. [Google Scholar] [CrossRef] [Green Version]
- Williams, B.M.; Hoel, L.A. Modeling and Forecasting Vehicular Traffic Flow as a Seasonal ARIMA Process: Theoretical Basis and Empirical Results. J. Transp. Eng. 2003, 129, 664–672. [Google Scholar] [CrossRef] [Green Version]
- Al Mamlook, R.E.; Abdulhameed, T.Z.; Hasan, R.; Al-Shaikhli, H.I.; Mohammed, I.; Tabatabai, S. Utilizing Machine Learning Models to Predict the Car Crash Injury Severity among Elderly Drivers. In Proceedings of the 2020 IEEE international conference on electro information technology (EIT), Chicago, IL, USA, 31 July–1 August 2020; pp. 105–111. [Google Scholar]
- Habtemichael, F.G.; Cetin, M. Short-Term Traffic Flow Rate Forecasting Based on Identifying Similar Traffic Patterns. Transp. Res. Part C Emerg. Technol. 2016, 66, 61–78. [Google Scholar] [CrossRef]
- Chan, K.Y.; Dillon, T.S.; Singh, J.; Chang, E. Neural-Network-Based Models for Short-Term Traffic Flow Forecasting Using a Hybrid Exponential Smoothing and Levenberg-Marquardt Algorithm. IEEE Trans. Intell. Transp. Syst. 2011, 13, 644–654. [Google Scholar] [CrossRef]
- Vlahogianni, E.I.; Karlaftis, M.G.; Golias, J.C. Optimized and Meta-Optimized Neural Networks for Short-Term Traffic Flow Prediction: A Genetic Approach. Transp. Res. Part C Emerg. Technol. 2005, 13, 211–234. [Google Scholar] [CrossRef]
- Zheng, W.; Lee, D.-H.; Shi, Q. Short-Term Freeway Traffic Flow Prediction: Bayesian Combined Neural Network Approach. J. Transp. Eng. 2006, 132, 114–121. [Google Scholar] [CrossRef] [Green Version]
- Dimitriou, L.; Tsekeris, T.; Stathopoulos, A. Adaptive Hybrid Fuzzy Rule-Based System Approach for Modeling and Predicting Urban Traffic Flow. Transp. Res. Part C Emerg. Technol. 2008, 16, 554–573. [Google Scholar] [CrossRef]
- Tan, M.-C.; Wong, S.C.; Xu, J.-M.; Guan, Z.-R.; Zhang, P. An Aggregation Approach to Short-Term Traffic Flow Prediction. IEEE Trans. Intell. Transp. Syst. 2009, 10, 60–69. [Google Scholar]
- Roozbeh, M.; Hesamian, G.; Akbari, M.G. Ridge Estimation in Semi-Parametric Regression Models under the Stochastic Restriction and Correlated Elliptically Contoured Errors. J. Comput. Appl. Math. 2020, 378, 112940. [Google Scholar] [CrossRef]
- Kumar, M.K.; Prasad, V.K. Driver Behavior Analysis and Prediction Models: A Survey. Int. J. Comput. Sci. Inf. Technol. 2015, 6, 3328–3333. [Google Scholar]
- Moslem, S.; Farooq, D.; Ghorbanzadeh, O.; Blaschke, T. Application of the AHP-BWM Model for Evaluating Driver Behavior Factors Related to Road Safety: A Case Study for Budapest. Symmetry 2020, 12, 243. [Google Scholar] [CrossRef] [Green Version]
- De Oña, J.; de Oña, R.; Eboli, L.; Forciniti, C.; Mazzulla, G. How to Identify the Key Factors That Affect Driver Perception of Accident Risk. A Comparison between Italian and Spanish Driver Behavior. Accid. Anal. Prev. 2014, 73, 225–235. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Wang, C.; Liu, Z.; Feng, Z.; Sze, N.N. Drivers’ Risk Perception and Risky Driving Behavior under Low Illumination Conditions: Modified Driver Behavior Questionnaire (DBQ) and Driver Skill Inventory (DSI). J. Adv. Transp. 2021, 2021, 5568240. [Google Scholar] [CrossRef]
- Ross, T.J. Fuzzy Logic with Engineering Applications; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Guney, K.; Sarikaya, N. Comparison of Mamdani and Sugeno Fuzzy Inference System Models for Resonant Frequency Calculation of Rectangular Microstrip Antennas. Prog. Electromagn. Res. B 2009, 12, 81–104. [Google Scholar] [CrossRef] [Green Version]
- Jassbi, J.J.; Serra, P.J.; Ribeiro, R.A.; Donati, A. A Comparison of Mandani and Sugeno Inference Systems for a Space Fault Detection Application. In Proceedings of the 2006 World Automation Congress, Budapest, Hungary, 24–26 July 2006; pp. 1–8. [Google Scholar]
- Dörr, D.; Grabengiesser, D.; Gauterin, F. Online Driving Style Recognition Using Fuzzy Logic. In Proceedings of the 17th international IEEE conference on intelligent transportation systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 1021–1026. [Google Scholar]
- Hao, H.; Ma, W.; Xu, H. A Fuzzy Logic-Based Multi-Agent Car-Following Model. Transp. Res. Part C Emerg. Technol. 2016, 69, 477–496. [Google Scholar] [CrossRef]
- Klir, G.; Yuan, B. Fuzzy Sets and Fuzzy Logic; Prentice Hall New Jersey: Hoboken, NJ, USA, 1995; Volume 4. [Google Scholar]
- Yadav, O.P.; Singh, N.; Chinnam, R.B.; Goel, P.S. A Fuzzy Logic Based Approach to Reliability Improvement Estimation during Product Development. Reliab. Eng. Syst. Saf. 2003, 80, 63–74. [Google Scholar] [CrossRef]
- Gross, F.; Persaud, B.N.; Lyon, C. A Guide to Developing Quality Crash Modification Factors; Federal Highway Administration, Office of Safety: Washington, DC, USA, 2010. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Driver Characteristics | Classification | Proportion of Drivers |
|---|---|---|
| Age | (18–25) | 23% |
| (25–30) | 26% | |
| (31–40) | 28% | |
| (41–50) | 16% | |
| (51–60) | 7% | |
| Gender | Male | 81% |
| Female | 19% | |
| No. of years of driving experience | Primary (1–5 years) | 27% |
| Middle (6–9 years) | 21% | |
| Senior (≥10 years) | 52% | |
| Highway driving mileage per day | Every day | 60% |
| Occasionally | 12% | |
| Often | 28% | |
| Speed when you drive on a highway on snow-covered roads | Similar | 18% |
| Below speed limit | 56% | |
| Below speed 10 limit | 17% | |
| Below 5 mph | 9% | |
| Number of times the driver has slid on snowy and icy roads | Sometimes | 60% |
| Never | 12% | |
| Often | 28% | |
| Safety | A Little Safe | 44% |
| Less Safe | 11% | |
| Very Safe | 45% |
| Variables | Mathematical Representation | Generalized Trapezoidal Fuzzy | ||||
|---|---|---|---|---|---|---|
| Weather Sensation (Input) | 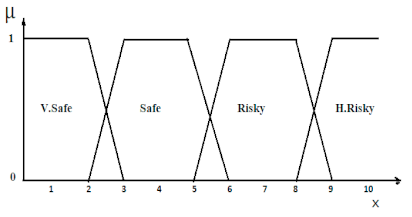 | |||||
| Fuzzy Sets | Very safe | safe | Risky | High, Risky | ||
| Values | 0–1–2–3 | 2–3–4–5 | 5–6–7–8 | 8–9–10 | ||
| Speed Limit (Output) |  | |||||
| Fuzzy Sets | increase the speed limit | retain current the speed limit | reduce the speed limit a little | reduce the speed limit a lot | ||
| Values | 20–15–10–5 | 10–5–0–(−5) | (−5)–(10)–(−15)–(20) | (−20)–(25)–(30) | ||
Production Rules:
| ||||||
| Scenario | Weather Condition/Speed Limit | Average Defuzzification | Modify the Speed Limit | Speed Range (mph) |
|---|---|---|---|---|
| S1 | Clear/80 mph | −5.3195 | the speed limit/reduce the speed | From 5 to −20 |
| S2 | Rain/80 mph | −3.8166 | retain the current speed limit | From 5 to −5 |
| S3 | Clear/70 mph | −0.3513 | retain the current speed limit | From 5 to −5 |
| S4 | Rain/70 mph | 2.0397 | retain the current speed limit | From 5 to −5 |
| S5 | Snow/70 mph | −11.492 | reduce the speed limit a little | From −10 to −20 |
| S6 | Icy/70 mph | −16.4599 | reduce the speed limit a little | From −10 to −20 |
| S7 | Snow/50 mph | 1.4335 | retain the current speed limit | From 5 to −5 |
| S8 | Icy/50 mph | −3.9219 | retain the current speed limit | From 5 to −5 |
| S9 | Snow/40 mph | 6.6224 | increase the speed limit/speed limit | From 20 to −5 |
| S10 | Icy/40mph | 3.4828 | retain current the speed limit | From 5 to −5 |
| Weather/Road Condition | Time Period | Change Speed Limit | Crash Type | Count |
|---|---|---|---|---|
| Clear/dry | Before | 80 mph | Lane Marge (LM) | 18 |
| Hit Object (HO) | 24 | |||
| After | 70 mph | Lane Marge (LM) | 15 | |
| Hit Object (HO) | 4 | |||
| Rain/wet | Before | 80 mph | Slow Dawn (SD) | 10 |
| Loss of Control (LOC) | 11 | |||
| After | 70 mph | Slow Dawn (SD | 6 | |
| Lane Change (CL) | 11 | |||
| Snow/snow | Before | 70 mph | Loss of Control (LOC) | 39 |
| OTHER | 5 | |||
| After | 50 mph | Loss of Control (LOC) | 14 | |
| OTHER | 1 | |||
| After | 40 mph | Loss of Control (LOC) | 1 | |
| OTHER | 3 | |||
| Snow/icy | Before | 70 mph | Loss of Control (LOC) | 73 |
| OTHER | 5 | |||
| After | 50 mph | Loss of Control (LOC) | 44 | |
| OTHER | 5 | |||
| After | 40 mph | Loss of Control (LOC) | 23 | |
| OTHER | 2 | |||
| Hit Deer (HD) | 10 |
| No # | Treatment | Traffic Volume | Traffic Volume | Weather/Road Condition | CMF | |||
|---|---|---|---|---|---|---|---|---|
| Speed limit and CMF in Clear/dry condition | LM | HO | Total Crash | Std. Error | ||||
| 1 | Change mean speed from 80 mph to 70 mph | Freeway (Four-lane roads) | Unspecified | Clear/dry | 0.83 | 0.16 | 0.45 | 0.047 |
| Speed limit and CMF in Cloudy/wet condition | SD | CL | Total Crash | Std. Error | ||||
| 2 | Change mean speed from 80 mph to 70 mph | Freeway (Four-lane roads) | Unspecified | Cloudy/wet | 0.1 | 1 | 0.81 | 0.046 |
| Speed limit and CMF in Snow/snow condition | LOC | Other | Total Crash | Std. Error | ||||
| 3 | Change mean speed from 70 mph to 50 mph | Freeway (Four-lane roads) | Unspecified | Snow/snow | 0.36 | 0.20 | 0.43 | 0.037 |
| Change mean speed from 70 mph to 40 mph | 0.03 | 0.60 | 0.09 | 0.038 | ||||
| Speed limit and CMF in Snow/icy condition | LOC | Other | Total Crash | Std. Error | ||||
| 4 | Change mean speed from 70 mph to 50 mph | Freeway (Four-lane roads) | Unspecified | Snow/icy | 0.60 | 1.0 | 0.63 | 0.040 |
| Change mean speed from 70 mph to 40 mph | 0.32 | 0.40 | 0.45 | 0.053 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Almadi, A.I.M.; Al Mamlook, R.E.; Almarhabi, Y.; Ullah, I.; Jamal, A.; Bandara, N. A Fuzzy-Logic Approach Based on Driver Decision-Making Behavior Modeling and Simulation. Sustainability 2022, 14, 8874. https://doi.org/10.3390/su14148874
Almadi AIM, Al Mamlook RE, Almarhabi Y, Ullah I, Jamal A, Bandara N. A Fuzzy-Logic Approach Based on Driver Decision-Making Behavior Modeling and Simulation. Sustainability. 2022; 14(14):8874. https://doi.org/10.3390/su14148874
Chicago/Turabian StyleAlmadi, Abdulla I. M., Rabia Emhamed Al Mamlook, Yahya Almarhabi, Irfan Ullah, Arshad Jamal, and Nishantha Bandara. 2022. "A Fuzzy-Logic Approach Based on Driver Decision-Making Behavior Modeling and Simulation" Sustainability 14, no. 14: 8874. https://doi.org/10.3390/su14148874
APA StyleAlmadi, A. I. M., Al Mamlook, R. E., Almarhabi, Y., Ullah, I., Jamal, A., & Bandara, N. (2022). A Fuzzy-Logic Approach Based on Driver Decision-Making Behavior Modeling and Simulation. Sustainability, 14(14), 8874. https://doi.org/10.3390/su14148874