Since the satisfactory control performance will require properly selecting user-defined parameters (please note that the proposed method is less sensitive than existing control methods), some discussions have been included in the following subsection.
5.1. Selection of the User-Defined Parameters
One of the key goals to design and implement new controllers is to achieve a faster response during the transient [
27]. For the proposed AFN-FTSC scheme, the larger values of these user-defined parameters will ensure fast-transient performance. However, such large user-defined parameters or gains are not always used, as these degrade the performance of the controller by amplifying the overshoot and providing the undesirable disturbance rejection. Therefore, it is essential to make a trade-off among various performance factors while tuning these gains. These performance factors must include the desired criteria for tracking (e.g., fewer or no offsets, small overshoots, fast settling time, etc.), the appropriate level of the disturbance rejection, and robustness against parametric constraints. Since the major focus of this work is on the disturbance rejection and resilience against uncertainties, tall user-defined parameters are carefully chosen to ensure an appropriate tracking performance. For the proposed AFN-FTSC algorithm, it is found that the most sensitive parameter is (
p/q), which is basically associated with the voltage tracking error. The dynamic performance depicting the output voltage with the proposed AFN-FTSC is depicted in
Figure 7 for various values of (
p/q). This figure shows the minimum value of the voltage overshoot when the value of (
p/q) is equal to 2; however, the settling time is much higher than other values of (
p/q). At the same time, the voltage overshoot and the settling time are 0.15 V and 9.44 ms, respectively, when the value of (
p/q) is 1.5, and this is more acceptable as compared to other values in terms of both voltage overshoot and settling time.
The voltage overshoot and settling time for different values of (
p/q) with the designed AFN-FTSC are detailed in
Table 1.
To ensure a fair comparison, the acquired results are compared to that of the existing FTSC while maintaining the same value of the most sensitive gain parameter, i.e., (
p/q = 1.5) for both controllers. Similarly, the values of other user-defined parameter values can be determined, and these are presented in
Table 2.
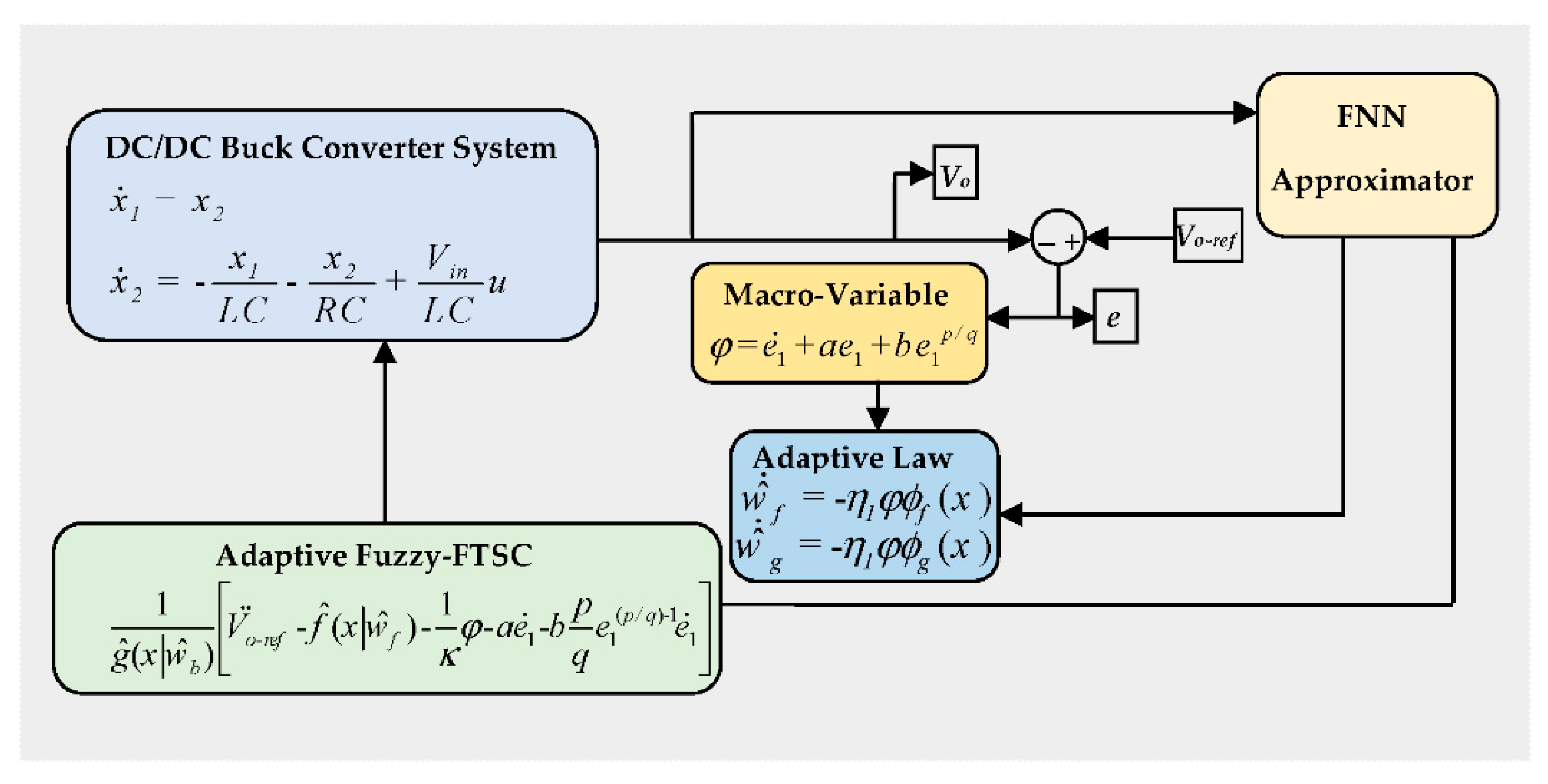
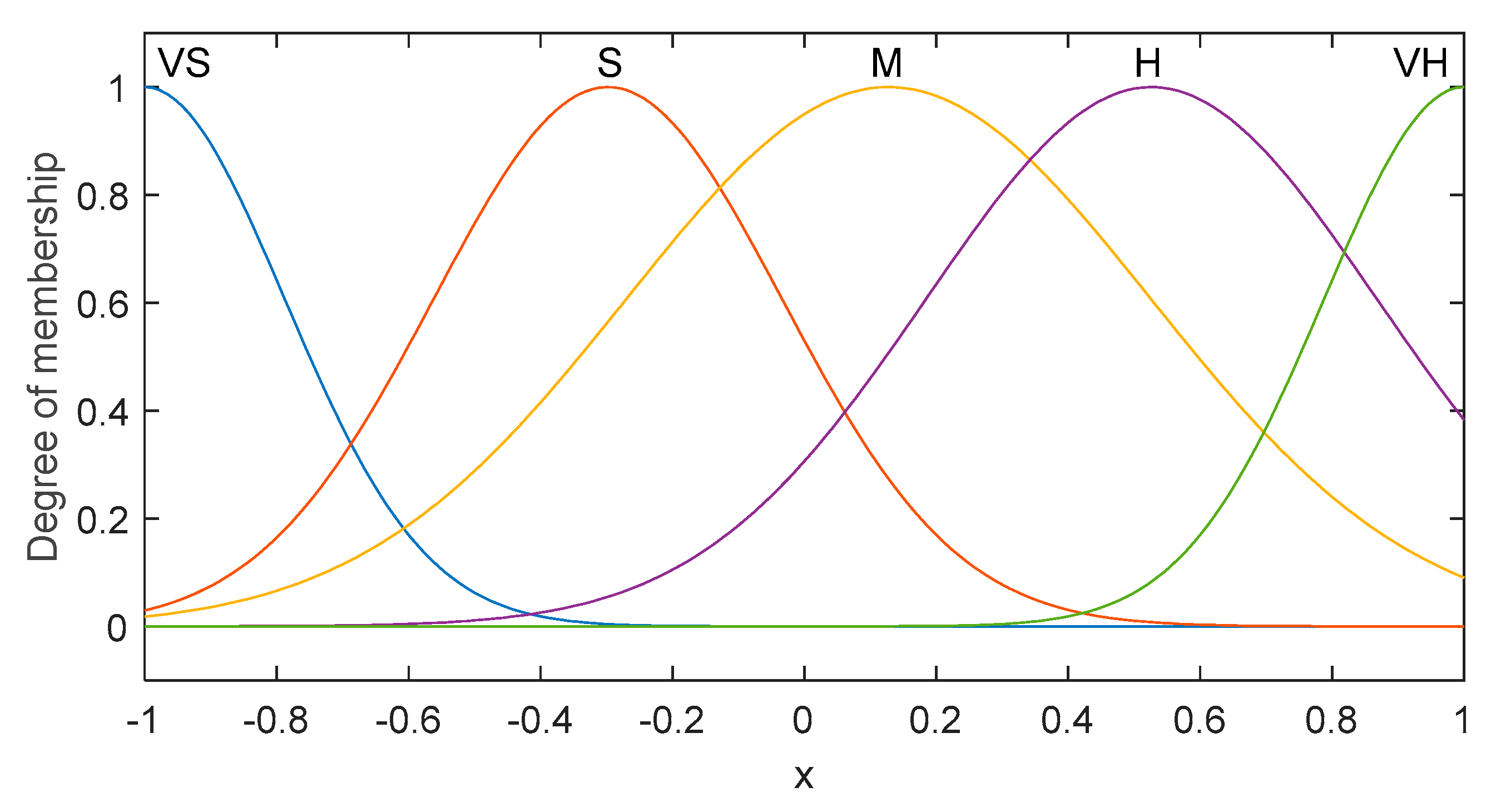
In the FNN estimator, we can specify a set of five decision variables regularly distributed on a universe of discourse [−1,1], as follows:
i = 5, which means that there are 25 rules to estimate the unknown terms. The selected 25 rules can cover the entire space and approximate any non-linear function. The member function degree is illustrated in
Figure 8.
The FNN weights are selected as follows:
The initial values for the FNN weights are selected in a random way, and the vector of fuzzy basis functions was constructed by (12). Using these gain parameters, the designed AFN-FTSC and existing FTSC are implemented in the following under different operating points of the buck DC/DC converter.
5.2. Experimental Validation
In this part, the efficacy of the suggested AFN-FTSC technique for regulating the output voltage of a buck DC/DC converter is demonstrated through a real-time implementation on dSPACE 1103 platforms (
Figure 9). All system parameters are carefully chosen by keeping the practical conditions in mind, which are given in
Table 3.
To show the efficacy of the designed AFN-FTSC algorithm, variations in the output reference voltage, input supply voltage, and load resistance are done based on the values in
Table 3. However, the nominal output voltage of the converter is set at 50 V with an input voltage of 100 V during the standard conditions, i.e., while considering no disturbances. To deploy the AFN-FTSC algorithm for the buck DC/DC converter, the sampling frequency, and the switching frequency are considered as 200 kHz and 20 kHz, respectively. The superiority of the AFN-FTSC is analyzed against an existing FTSC as proposed in [
14] in terms of tracking error, overshoot, and settling time. The performance of the designed AFN-FTSC algorithm is validated under a variety of operating scenarios: variations in input supply voltage, load resistance, and output reference voltage as demonstrated through the following four cases:
Controller performance under variations in the load resistance,
Controller performance under variations in the input supply voltage,
Controller performance under start-up transient,
Controller performance under variations in the output reference voltage,
Case I: Output voltage regulation with variations in the load resistance.
In this scenario, the test is conducted to justify the load disturbance rejection capacity of the proposed AFN-FTSC algorithm while making a comparison with the FTSC algorithm. For this purpose, the effects of only variations in the load resistance are considered, while the output reference voltage remains constant at 50 V. In this test, the load resistance of the buck DC/DC converter is decreased from 80 Ω to 40 Ω, conversely. With such changes in the load resistance, the dynamic responses of the Buck DC/DC converter are represented by two states: output voltage (
Vo) and inductor current (
iL), as illustrated in
Figure 10. The output voltage quickly settles down to its reference value without affecting the steady-state behavior while the designed one is used. However, the overshoots are a bit higher with higher settling times, especially at the instant of changes, i.e., at the decrease in load resistance when the existing FTSC is used. Hence,
Figure 10a provides an observation that the designed AFN-FTSC controller can stabilize the output voltage very quickly to its desired value without having any significant impact even with a large variation in the load resistance.
Figure 10a also confirms the faster settling time with less transient with the AFN-FTSC controller during the post-disturbance operation while making its comparison with the FTSC controller.
Several quantitative factors such as the peak value, overshoot, undershoot, and settling time are calculated to validate the performance of the designed AFN-FTSC against the FTSC, where these values for both controllers are captured in
Table 4. The designed AFN-FTSC outperforms the existing FTSC in all aspects that can also be found in
Table 4. The next case study analyzes and compares the performance of the designed and existing controllers against variations in the input supply voltage.
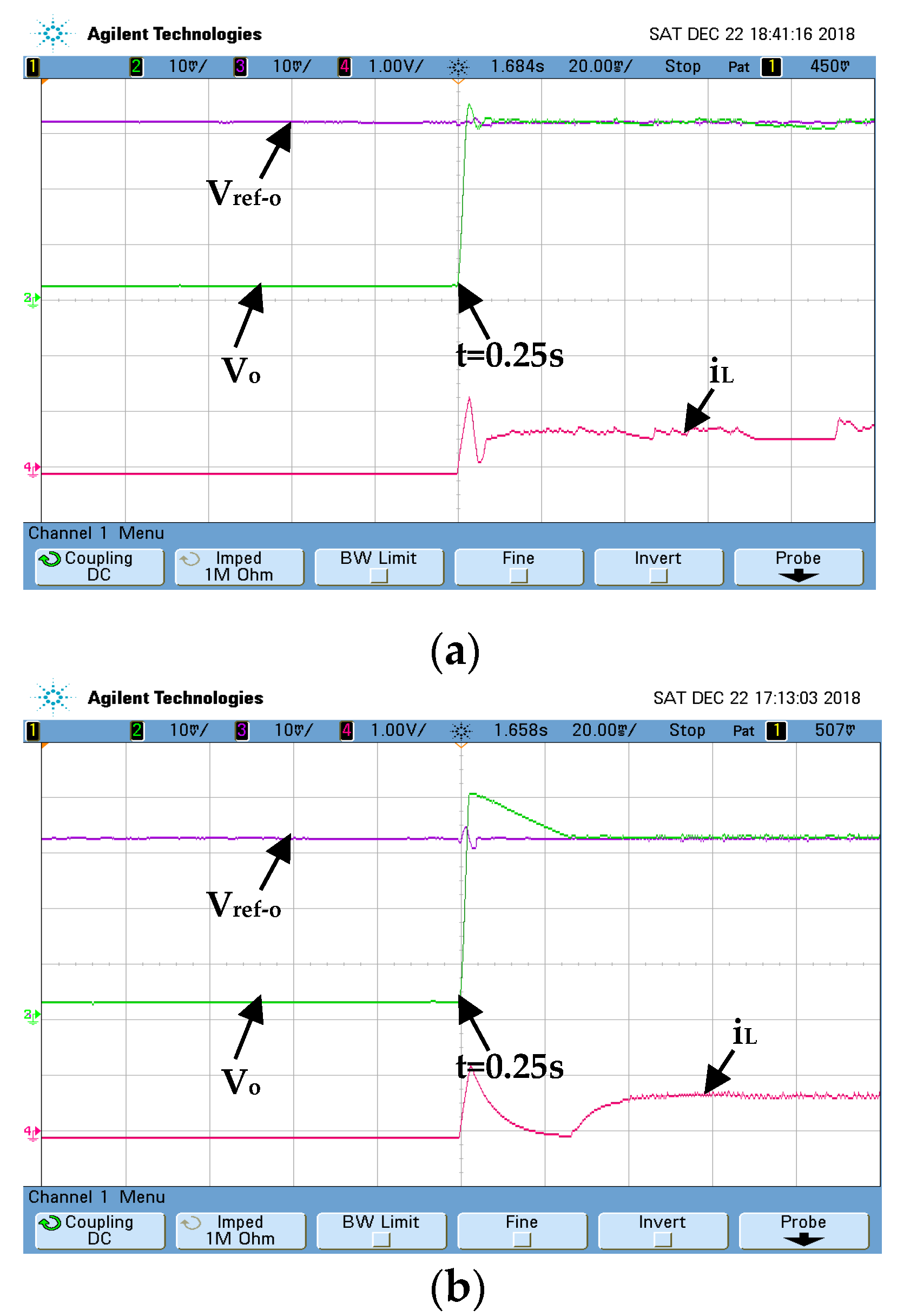
Case II: Output voltage regulation with variations in the input supply voltage
This test considers the variation in the input supply voltage to show the superiority of the designed AFN-FTSC over the existing FTSC algorithm. The input voltage is rated at 0 V at the start of the test, and it is suddenly raised to 100 V at t = 0.25 s. However, the output reference voltage is kept constant at 30 V. The corresponding dynamic responses of different states for the converter are shown in
Figure 11. As illustrated in
Figure 11a, the designed AFN-FTSC can efficiently eliminate the effects of fluctuations in the input as evidenced by the proper tracking of the output reference voltage. On the other hand, the existing FTSC fails to realize the desired voltage tracking performance when responding to changes in input supply voltage. The result in
Figure 11b shows that the FTSC cannot cope with changes in the input supply voltage, however, the designed AFN-FTSC does not experience any problem to maintain the desired performance.
The peak value, overshoot, and settling time are calculated for this scenario and presented in
Table 5, which clearly demonstrates the effectiveness of the AFN-FTSC over the FTSC. From
Table 5, it can be seen that the output voltage recovery time of the AFN-FTSC is 5 ms, whereas it is 28 ms for the existing FTSC. Furthermore, from
Table 5, it can be seen that the voltage fluctuation with the designed AFN-FTSC is 3 V, while it is 11 V with the existing FTSC. In comparison to the existing FTSC controller, the designed AFN-FTSC controller has a shorter settling time and lower voltage changes, as shown by the data analysis.
In the next case, the converter’s reference output voltage variation is regarded as an external perturbation to the converter, which is discussed in the following subsection.
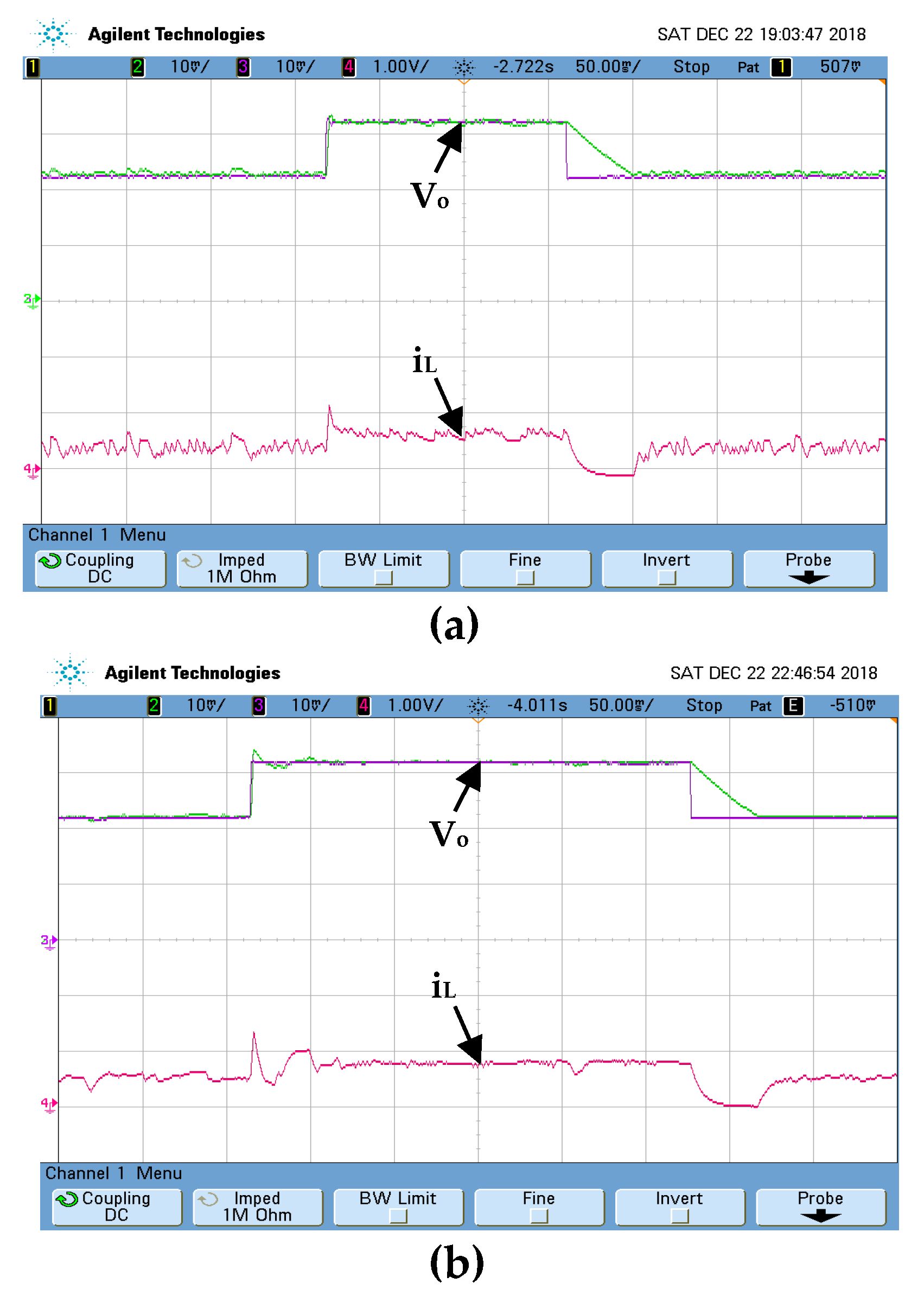
Case III: Output voltage regulation with variations in the output reference voltage.
This test counts variations in the output reference voltage to demonstrate the robustness of both controllers. At the start of the test, the reference voltage is rated at 20 V and then suddenly changed to 30 V and vice-versa. Under this disturbance, the dynamic responses of both states (
Vo and
iL) are depicted in
Figure 12a,b. These responses clearly demonstrate the superior capability of the AFN-FTSC controller (
Figure 12a) for tracking output reference voltage, as the existing FTSC controller fails to do so (
Figure 12b).
The peak value, overshoot, undershoot, and settling time are calculated for this scenario and presented in
Table 6. This table clearly shows very satisfactory performance in terms of both settling time and overshoot with the designed AFN-FTSC over the FTSC.
The voltage tracking capability of each controller is evaluated using a sin-wave reference output voltage. As illustrated in
Figure 13, the AFN-FTSC not only offers better precise results, but it also eliminates chattering.
The voltage tracking capability of each controller is evaluated using a triangular-wave reference output voltage (
Figure 14). The results indicate the advantage of the considered AFN-FTSC over the FTSC algorithm in terms of output voltage tracking. The studied AFN-FTSC displays a small tracking error (
Figure 14a).
Case IV: Output voltage regulation under nominal start-up in the reference voltage.
The purpose of this test is to evaluate the robustness of both controllers under nominal start-up in the output voltage reference. The output voltage of the converter, as presented in
Figure 15, is observed for this case, which clearly shows the settling time as almost 5 ms with the AFN-FTSC. However, this settling-time is a bit larger, i.e., around 20 ms if the FTSC is used. Similarly, the FTSC exhibits an overshoot of 20%, while there are no overshoots when the AFN-FTSC is used. Therefore, it is also possible to deduce that the AFN-FTSC method provides a superior dynamic response to the existing FTSC method.
The peak value, overshoot, undershoot, and settling time are calculated for this case study and presented in
Table 7. This table clearly shows very satisfactory performance in terms of both maximum overshoot and settling time with the suggested AFN-FTSC over the FTSC. Hence, the overall performance of the AFN-FTSC significantly dominates that of the FTSC for all cases.


 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}