
Applicability Assessment of Active Safety Systems for Motorcycles Using Population-Based Crash Data: Cross-Country Comparison among Australia, Italy, and USA

 , ,
, ,  , , and
, , and
Abstract
1. Introduction
2. Materials and Methods
2.1. Settings: USA, Prato (IT), and Victoria (AUS)
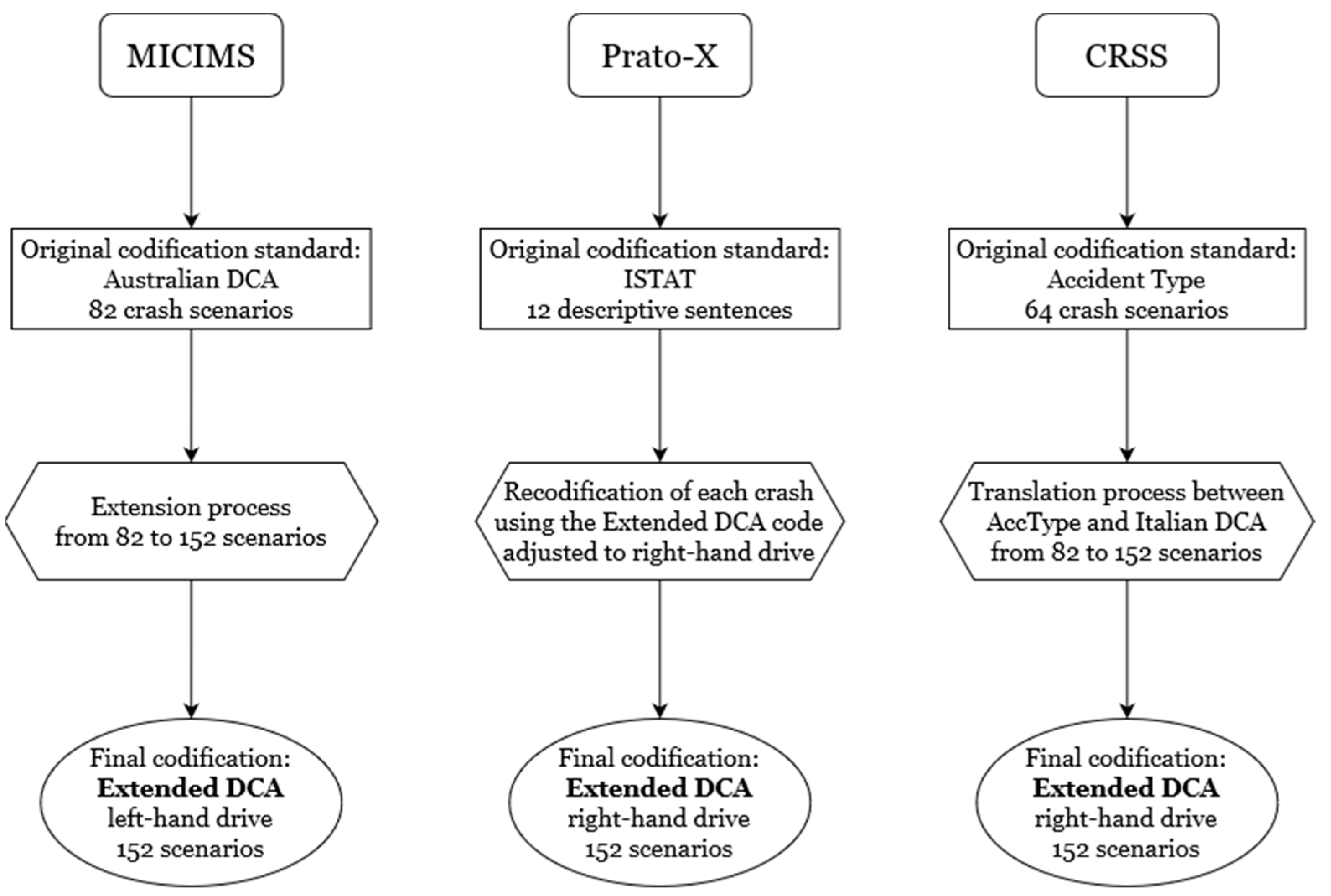
2.2. Data Sources: CRSS, Prato-X, and MICIMS Database
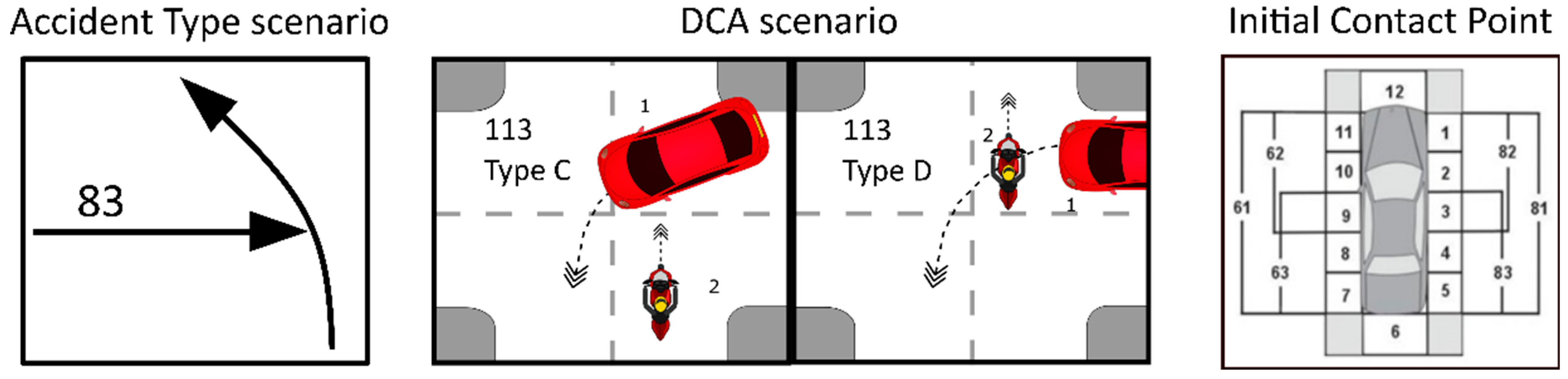
2.3. Crash Classification
- − DCA scenario n°113 type C when the CRSS variable “Initial Contact Point” had a value between 1 and 11 for the PTW and between 7 and 11 for the other vehicle.
- − DCA scenario n°113 type D when the CRSS variable “Initial Contact Point” had a value between 1 and 5 for the PTW and between 1 and 11 for the other vehicle.
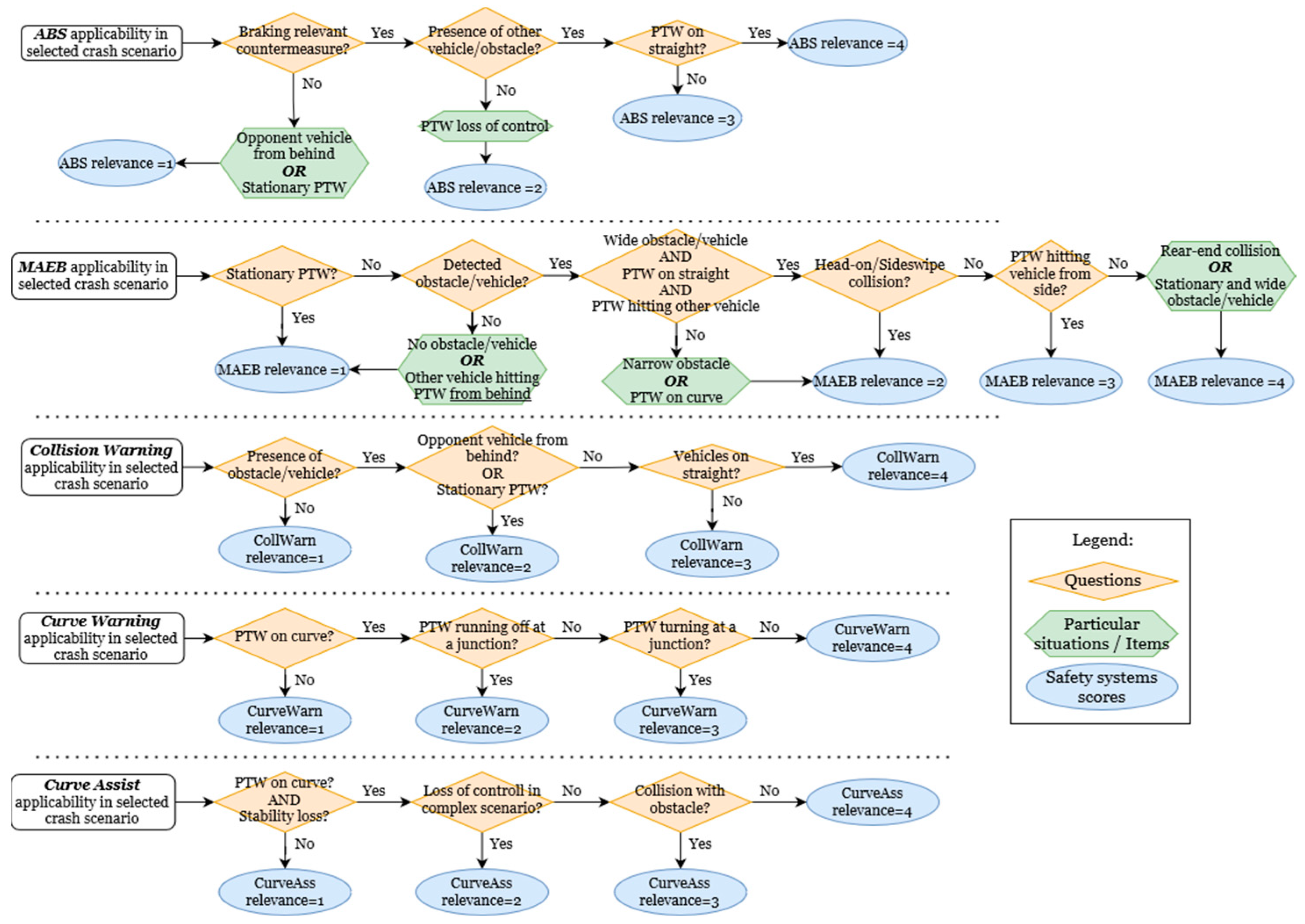
2.4. Determining Device Applicability
3. Results
3.1. Independent Systems Analysis
3.2. Combined Systems Analysis
4. Discussion
4.1. ABS
Difference between Countries—ABS Category 4
4.2. MAEB and Collision Warning
Difference between Countries—MAEB Category 3
4.3. ABS Plus MAEB Plus Collision Warning
4.4. Curve Warning and Curve Assist
Differences between Countries—Curve Warning and Curve Assist Category 4
4.5. Remaining Crashes
5. Limitations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Australia (2014) | Italy (2018) | |
|---|---|---|
| Population | 23,490,700 | 60,480,000 |
| N° vehicles | 17,633,493 | 51,682,370 |
| N° PTWs | 780,174 | 6,780,733 |
| All crashes | 34,091 | 172,553 |
| PTW crashes | 7734 | 24,550 |
| Killed in all crashes | 1156 | 3334 |
| Killed in PTW crashes | 192 | 844 |
| Ratio vehicles/population | 0.75 | 0.85 |
| % PTW in the fleets | 4.4% | 13.1% |
| (PTW per 1000 vehicles) | (44.2) | (131.2) |
| Mortality rate (killed in all crashes for 100,000 inhabitants) | 4.92 | 5.51 |
| % PTW crashes (w.r.t. all crashes) | - | 14.2% |
| % Killed in PTW crashes (w.r.t. all fatal crashes) | 16.6% | 25.3% |
| DCA + Type (ITA and AUS) | AccType (USA) | Use of Additional Variables for Translation |
|---|---|---|
| 100/101/102/103/104/105/167 | 13 | No |
| 106/107/108/109/169 | 15/16 | No |
| 110A | 86 | No |
| 110B | 89 | No |
| 110C | 88 | No |
| 110D | 87 | No |
| 112A/B | 81 | No |
| 112C | 80 | Yes |
| 112D | 80 | Yes |
| 113A/B | 82 | No |
| 113C | 83 | Yes |
| 113D | 83 | Yes |
| 114A | 74 + 75 | Yes |
| 114B | 74 + 75 | Yes |
| 114C | 74 + 75 | Yes |
| 114D | 74 + 75 | Yes |
| 115/117AB/CD | 84 + 85 | Yes |
| 115/117CD/AB | 84 + 85 | Yes |
| 116A | 78 | Yes |
| 116B | 78 | Yes |
| 116C | 79 | Yes |
| 116D | 79 | Yes |
| 118ABCD | 84 + 85 | Yes |
| 119 | 84 + 85 + 90 + 91 | Yes |
| 120 | 50 + 51 | Yes |
| 121A/B | 68 | No |
| 121C | 69 | Yes |
| 121D | 69 | Yes |
| 129 | 52 + 53 + 62 + 63 + 66 + 67 | Yes |
| 130/131/132A | 20 + 24 + 28 | Yes |
| 130B | 21 + 25 + 29 | Yes |
| 131B | 22 + 26 + 30 | Yes |
| 132B | 23 + 27 + 31 | Yes |
| 133A | 44 | Yes |
| 133B | 44 | Yes |
| 133C | 45 | Yes |
| 133D | 45 | Yes |
| 134A | 46 | No |
| 135A | 47 | No |
| 136A | 70 | Yes |
| 136B | 71 | Yes |
| 137A | 72 | No |
| 137B | 73 | No |
| 139 | 32 + 33 + 42 + 43 + 48 + 49 | No |
| 140A | 76 | Yes |
| 140B | 76 | Yes |
| 140C | 77 | Yes |
| 140D | 77 | Yes |
| 141 | 11 + 12 | Yes |
| 144/146 | 92 | No |
| 145A | 21 + 25 + 29 | Yes |
| 145B | 20 + 24 + 28 | Yes |
| 149 | 98 + 99 | Yes |
| 150A | 50 + 51 + 64 | Yes |
| 150B | 50 + 51 + 65 | Yes |
| 159 | 98 + 99 | Yes |
| 160/161/162A | 11 | No |
| 163 | 12 | Yes |
| 164 | 12 | Yes |
| 165 | 12 | Yes |
| 166 | 12 | Yes |
| 171 | 7 | Yes |
| 173 | 2 | Yes |
| 175 | 14 | No |
| 179 | 04 + 05 + 09 + 10 | Yes |
| 180/182/184 | 02 + 07 | Yes |
| 181/183 | 02 + 07 | Yes |
| 189 | 04 + 05 + 09 + 10 | Yes |
| 198 | 98 | Yes |
| 199 | 99 | Yes |
| Code (DCA) | ABS | MAEB | CollWarn | CurveWarn | CurveAss |
|---|---|---|---|---|---|
| 100–105 | 4 | -- | 4 | -- | -- |
| 106 | -- | -- | 3 | -- | 3 |
| 107 | 4 | -- | 3 | -- | -- |
| 108 | 4 | 3 | 4 | -- | -- |
| 110 | 4 | 3 (PTW into OV) | 4 | -- | -- |
| 111 | 4 (1 PTW), 3 (2 PTW into 1 OV) | 3 (1 PTW into 2 OV) | 3 | -- | 3 (2 PTW) |
| 112 | 4 (1 PTW) | -- | 3 | -- | 3 (2 PTW) |
| 113 | 3 (1 PTW, 1 OV into 2 PTW), 4 (2 PTW into 1 OV) | 3 (2 PTW into 1 OV) | 3 | -- | 3 (1 PTW) |
| 114 | 3 (2 PTW) | -- | 3 | -- | 3 |
| 115 | 3 | -- | 3 | -- | 3 |
| 116 | 3 (1 PTW), 4 (2 PTW) | 3 (2 PTW into 1 OV) | 3 | -- | 3 (1 PTW) |
| 117–118 | 3 | -- | 3 | -- | 3 |
| 120 | 4 | -- | 4 | -- | -- |
| 121 | 3 (1 PTW), 4 (2 PTW) | 3 (2 PTW into 1 OV) | 3 | -- | 3 (1 PTW) |
| 122 | 4 (1 PTW), 3 (2 PTW) | -- | 3 | -- | 3 (2 PTW) |
| 123–125 | 3 | -- | 3 | -- | 3 |
| 130–132 | 4 (1 PTW) | 4 (1 PTW) | 4 (1 PTW) | -- | -- |
| 133 | 4 (1 PTW) | -- | -- | -- | -- |
| 134–135 | 3 (1 PTW) | -- | 3 (1 PTW) | -- | 3 (1 PTW) |
| 136–137 | 4 (2 PTW) | 3 (2 PTW) | 3 (2 PTW) | -- | 3 (1 PTW) |
| 140 | 4 | -- | 3 | -- | 3 (1 PTW) |
| 141 | -- | -- | -- | -- | 3 |
| 142–143 | 4 (2 PTW) | 3 (2 PTW) | 4 (2 PTW) | -- | -- |
| 145 | 4 (2 PTW) | 4 (2 PTW) | 4 (2 PTW) | -- | -- |
| 147 | 4 | 3 (1 PTW into 2 OV, 2 PTW) | 4 | -- | -- |
| 148 | 4 | 3 (1 PTW into 2 OV, 2 PTW) | 3 | -- | -- |
| 150 | 4 | -- | 3 | -- | -- |
| 152 | -- | -- | 3 (2 PTW) | -- | -- |
| 153 | 3 (1 PTW), 4 (2 PTW) | -- | 3 (1 PTW) | -- | -- |
| 154 | -- | -- | 4 (1 PTW) | -- | -- |
| 160–162 | 4 (1 PTW) | 4 (1 PTW) | 4 (1 PTW) | -- | -- |
| 163 | 4 | -- | 4 | -- | -- |
| 164 | 4 | 3 | 4 | -- | -- |
| 165 | 4 | 4 | 4 | -- | -- |
| 166–167 | 4 | -- | 4 | -- | -- |
| 175 | 4 | -- | 4 | -- | -- |
| 180–184 | -- | -- | -- | 4 | 4 |
| 189 | -- | -- | -- | -- | 4 |
| 192 | 4 | 4 | 4 | -- | -- |
| 193 | 4 | -- | 4 | -- | -- |



References
- Australian Bureau of Statistics. Survey of Motor Vehicle Use, Australia 2008. Months Ended 31 October 2007. Available online: http://www.abs.gov.au/AUSSTATS/abs@.nsf/Lookup/9208.0Main+Features112 (accessed on 19 April 2022).
- Australian Bureau of Statistics. Motor Vehicle Census, Australia. 2013. Available online: https://www.abs.gov.au/AUSSTATS/abs@.nsf/Lookup/9309.0Main+Features131%20Jan%202013?OpenDocument= (accessed on 19 April 2022).
- Swedish Transport Administration. Increased Safety for Motorcycle and Moped Riders. Joint Strategy Version 2.0 for the Years 2010–2020; Swedish Transport Administration: Borlänge, Sweden, 2020.
- The Motorcycle Industry in Europe, “Brexit—ACEM—The Motorcycle Industry in Europe”. 2018. Available online: https://www.acem.eu/policy-areas/brexit (accessed on 19 April 2022).
- World Health Organization. Global Status Report on Road Safety; World Health Organization: Geneva, Switzerland, 2018. [Google Scholar]
- Department of Infrastructure, Transport, Regional Development and Local Government: Road deaths Australia 2008 statistical summary. Road Safety Report No. 4. Canberra: The Department. 2009. Available online: https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=&ved=2ahUKEwiD3dz36qj4AhWdpXIEHcQbBcUQFnoECAsQAQ&url=https%3A%2F%2Fwww.bitre.gov.au%2Fsites%2Fdefault%2Ffiles%2FRDA_Summary_2008.pdf&usg=AOvVaw1W5PxGiGHROPA-LkOzp_go (accessed on 19 April 2022).
- Henley, G.; Harrison, J. Serious Injury due to Land Transport Accidents—Serious Injury Due to Land Transport Accidents. 2008. Available online: https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=&ved=2ahUKEwj_r_vJ6qj4AhWOnHIEHaG2D0wQFnoECAoQAQ&url=https%3A%2F%2Fwww.aihw.gov.au%2Fgetmedia%2F7c390016-ebd1-4ca6-9813-254e85d99441%2Finjcat-129-11033.pdf.aspx%3Finline%3Dtrue&usg=AOvVaw1PO3_GpRo4TJEpGtxMOxlv (accessed on 19 April 2022).
- Australian Bureau of Statistics. Survey of Motor Vehicle Use, Australia. 2014. Available online: https://www.abs.gov.au/AUSSTATS/abs@.nsf/Lookup/9309.0Main+Features131%20Jan%202014?OpenDocument (accessed on 19 April 2022).
- Vic Roads. Motorcycle Licence and Learner Permit. In Melbourne, Australia—State Government of Victoria; 2014. Available online: https://www.vicroads.vic.gov.au/licences/licence-and-permit-types/motorcycle-licence-and-learner-permit (accessed on 19 April 2022).
- Istituto Nazionale di Statistica. Incidenti Stradali. 2019. Available online: https://www.istat.it/it/files//2019/07/Incidenti_stradali_2018_aggiornamento_Ottobre2019.pdf (accessed on 19 April 2022).
- National Highway Traffic Safety Administration. Crash Report Sampling System (CRSS) Analytical User’s Manual 2020. Available online: https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/813236 (accessed on 19 April 2022).
- Lie, A.K.A.; Tingvall, C.; Krafft, M. The effectiveness of ESP (Electronic Stability Program) in reducing real life accidents. Traffic Inj. Prev. 2004, 5, 37–41. [Google Scholar] [CrossRef] [PubMed]
- European Transport Safety Council. Reducing Motorcyclist Deaths in Europe. 2007. Available online: https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=&ved=2ahUKEwiCjpnT8aj4AhVRoHIEHao-A3MQFnoECAkQAQ&url=https%3A%2F%2Farchive.etsc.eu%2Fdocuments%2Fcopy_of_copy_of_copy_of_PIN%2520Flash%25207%2520Reducing%2520motorcyclist%2520deaths%2520in%2520Europe.pdf&usg=AOvVaw0dHDj8C7KZRDl0fUXitRN2 (accessed on 19 April 2022).
- Yannis, G.; Antoniou, C.; Evgenikos, P.; Papantoniou, P.; Kirk, A. Characteristics and Causes of Power Two Wheeler Accidents in Europe. Procedia—Soc. Behav. Sci. 2012, 48, 1535–1544. [Google Scholar] [CrossRef]
- Sporner, A.; Kramlich, T. Motorcycle braking and its influence on severity of injury. In Gesamtverband d. Dt. Versicherungswirtschaft e. V., GDV, Inst. f. Fahrzeugsicherheit; 2001; pp. 1–7. Available online: https://www-nrd.nhtsa.dot.gov/pdf/esv/esv17/Proceed/00168.pdf (accessed on 19 April 2022).
- Rizzi, M.; Strandroth, J.; Tingvall, C. The effectiveness of antilock brake systems on motorcycles in reducing real-life crashes and injuries. Traffic Inj. Prev. 2009, 10, 479–487. [Google Scholar] [CrossRef]
- de Filippi, P.; Tanelli, M.; Corno, M.; Savaresi, S.M.; Santucci, M.D. Electronic stability control for powered two-wheelers. IEEE Trans. Control Syst. Technol. 2014, 22, 265–272. [Google Scholar] [CrossRef]
- Matschl, G.; Mörbe, M.; Gröger, C. Motorcycle Stability Control—MSC The next step into safety solutions for motorcycles. In Proceedings of the 10th International Motorcycle Conference, Köln, Germany, 29–30 September 2014; pp. 128–154. [Google Scholar]
- Savino, G.; Mackenzie, J.; Allen, T.; Baldock, M.; Brown, J.; Fitzharris, M. A robust estimation of the effects of motorcycle autonomous emergency braking (MAEB) based on in-depth crashes in Australia. Traffic Inj. Prev. 2016, 17, 66–72. [Google Scholar] [CrossRef]
- Lucci, C.; Allen, T.; Pierini, M.; Savino, G. Motorcycle Autonomous Emergency Braking (MAEB) employed as enhanced braking: Estimating the potential for injury reduction using real-world crash modeling. Traffic Inj. Prev. 2021, 1–7. [Google Scholar] [CrossRef]
- Savino, G.; Pierini, M.; Fitzharris, M. Motorcycle active safety systems: Assessment of the function and applicability using a population-based crash data set. Traffic Inj. Prev. 2019, 20, 406–412. [Google Scholar] [CrossRef]
- Gil, G.; Savino, G.; Piantini, S.; Baldanzini, N.; Happee, R.; Pierini, M. Are automatic systems the future of motorcycle safety? A novel methodology to prioritize potential safety solutions based on their projected effectiveness. Traffic Inj. Prev. 2017, 18, 877–885. [Google Scholar] [CrossRef]
- Australian Bureau of Statistics. Australian Demographic Statistic. 2014. Available online: https://www.abs.gov.au/AUSSTATS/abs@.nsf/Lookup/3101.0Main+Features1Jun%202014 (accessed on 19 April 2022).
- Istituto Nazionale di Statistica. Incidenti Stradali in Toscana. 2020. Available online: https://www.istat.it/it/files//2019/11/Focus-Toscana-2018.pdf (accessed on 19 April 2022).
- National Highway Traffic Safety Administration. Traffic Safety Facts 2018 Data: Summary of Motor Vehicle Crashes. November 2020; pp. 1–10. Available online: https://www.nhtsa.gov/risky-driving (accessed on 19 April 2022).
- Teoh, E.R. Motorcycles registered in the United States, 2002–2021. Insur. Inst. Highw. Saf. 2021. Available online: https://www.iihs.org/api/datastoredocument/bibliography/2225 (accessed on 19 April 2022).
- Allen, T.; McClure, R.; Newstead, S.V.; Lenné, M.G.; Hillard, P.; Symmons, M.; Day, L. Exposure factors of Victoria’s active motorcycle fleet related to serious injury crash risk. Traffic Inj. Prev. 2016, 17, 870–877. [Google Scholar] [CrossRef]
- Vic Roads. 2014 Analysis of the Victorian Road Toll Fatalities and Serious Injuries. 2015. Available online: https://www.google.it/url?sa=t&rct=j&q=&esrc=s&source=web&cd=&ved=2ahUKEwjApqS2tqn4AhXQTd8KHXq_B9kQFnoECA0QAw&url=https%3A%2F%2Fwww.vicroads.vic.gov.au%2F-%2Fmedia%2Ffiles%2Fdocuments%2Fsafety-and-road-rules%2Farchived%2F2014_analysis_of_the_victorian_road_toll__fatalities_and_serious_injuries.ashx&usg=AOvVaw1QWDcJRCJ8RvzVmeoR9GFc (accessed on 19 April 2022).
- Allen, T.; Newstead, S.; Lenné, M.G.; McClure, R.; Hillard, P.; Symmons, M.; Day, L. Contributing factors to motorcycle injury crashes in Victoria, Australia. Transp. Res. Part F Traffic Psychol. Behav. 2017, 45, 157–168. [Google Scholar] [CrossRef]
- Day, L.; Lenné, M.G.; Symmons, M.; Hillard, P.; Newstead, S.; Allen, T.; McClure, R. Population based case-control study of serious non-fatal motorcycle crashes. BMC Public Health 2013, 13, 1–6. [Google Scholar] [CrossRef]
- Vic Roads. Crashstats—User Guide. 2013. Available online: https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=&ved=2ahUKEwjbpqbLtqn4AhUOnXIEHclVCXIQFnoECAUQAQ&url=https%3A%2F%2Fdata.vicroads.vic.gov.au%2Fmetadata%2Fcrashstats_user_guide_and_appendices.pdf&usg=AOvVaw2f9Xa_hyXHKfyieFk8uLDa (accessed on 19 April 2022).
- Rizzi, M.; Strandroth, J.; Holst, J.; Tingvall, C. Does the improved stability offered by motorcycle antilock brakes (ABS) make sliding crashes less common? In-depth analysis of fatal crashes involving motorcycles fitted with abs. Traffic Inj. Prev. 2016, 17, 625–632. [Google Scholar] [CrossRef] [PubMed]
- Teoh, E.R. Motorcycle antilock braking systems and fatal crash rates: Updated results. Traffic Inj. Prev. 2022, 23, 1–5. [Google Scholar] [CrossRef] [PubMed]
- Silla, A.; Leden, L.; Rämä, P.; Scholliers, J.; Van Noort, M.; Morris, A.; Hancox, G.; Bell, D. A headway to improve PTW rider safety within the EU through three types of ITS. Eur. Transp. Res. Rev. 2018, 10, 1–12. [Google Scholar] [CrossRef]
- Fang, C.Y.; Hsu, W.H.; Ma, C.W.; Chen, S.W. A vision-based safety driver assistance system for motorcycles on a smartphone. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 328–333. [Google Scholar] [CrossRef]
- Gil, G.; Savino, G.; Piantini, S.; Pierini, M. Motorcycle that see: Multifocal stereo vision sensor for advanced safety systems in tilting vehicles. Sensors 2018, 18, 295. [Google Scholar] [CrossRef]
- Huth, V.; Gelau, C. Predicting the acceptance of advanced rider assistance systems. Accid. Anal. Prev. 2013, 50, 51–58. [Google Scholar] [CrossRef] [PubMed]
- Biral, F.; Bosetti, P.; Lot, R. Experimental evaluation of a system for assisting motorcyclists to safely ride road bends. Eur. Transp. Res. Rev. 2014, 6, 411–423. [Google Scholar] [CrossRef]
- Lich, T.; Block, W.; Prashanth, S.; Heiler, B. Motorcycle Stability Control—The Next Generation of Motorcycle Safety and Riding Dynamics. SAE Int. J. Engines 2016, 9, 491–498. [Google Scholar]
- Cohen, J. Weighted kappa: Nominal scale agreement provision for scaled disagreement or partial credit. Psychol. Bull. 1968, 70, 213. [Google Scholar] [CrossRef]
- Cohen, J. A Coefficient of Agreement for Nominal Scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Gil, G.; Savino, G.; Piantini, S.; Pierini, M. Is stereo vision a suitable remote sensing approach for motorcycle safety? An analysis of LIDAR, RADAR, and machine vision technologies subjected to the dynamics of a tilting vehicle. In Proceedings of the 7th Transport Research Arena TRA, Vienna, Austria, 16–19 April 2017; Volume 12, pp. 1–10. [Google Scholar]
- Raj, T.; Hashim, F.H.; Huddin, A.B.; Ibrahim, M.F.; Hussain, A. A survey on LiDAR scanning mechanisms. Electronics 2020, 9, 741. [Google Scholar] [CrossRef]
- Biral, F.; da Lio, M.; Lot, R.; Sartori, R. An intelligent curve warning system for powered two wheel vehicles. Eur. Transp. Res. Rev. 2010, 2, 147–156. [Google Scholar] [CrossRef]
- Dean, M.E.; Haus, S.H.; Sherony, R.; Gabler, H.C. Potential Crash Benefits of Motorcycle-Detecting Automatic Emergency Braking Systems. In Proceedings of the IRCOBI Conference, online, 8–10 September 2021; pp. 39–50. [Google Scholar]
- Australian Bureau of Statistics “Road Trauma Australia 2014-Statistical Summary”. 2015. Available online: https://www.nrspp.org.au/resources/bitre-road-deaths-australia-2014-statistical-summary/ (accessed on 19 April 2022).




| Victoria (2014) | Prato (2018) | USA (2018) | |
|---|---|---|---|
| Population | 5,800,000 | 190,000 | 326,895,465 |
| N° vehicles | 4,483,098 | 154,557 | 297,042,658 |
| N° PTWs | 174,336 | 18,080 | 8,305,171 |
| All crashes | 5098 | 964 | 6,734,000 |
| PTW crashes | 958 | 294 | 82,124 |
| Killed in all crashes | 249 | 9 | 35,560 |
| Killed in PTW crashes | 30 | 0 | 4181 |
| Ratio vehicles/population | 0.77 | 0.81 | 0.91 |
| % PTW in the fleets | 3.9% | 11.7% | 2.8% |
| (PTW per 1000 vehicles) | (38.9) | (116.9) | (27.9) |
| Mortality rate (killed in all crashes for 100,000 inhabitants) | 4.29 | 4.73 | 10.87 |
| % PTW crashes (w.r.t. all crashes) | - | 30.5% | 1.2% |
| % Killed in PTW crashes (w.r.t. all fatal crashes) | 12.0% | 0.0% | 11.8% |
| MICIMS | Prato-X | CRSS | |
|---|---|---|---|
| Extended name | Managing Increasing Challenges in Motorcycle Safety | -- | Crash Reporting Sampling System |
| Location | Victoria, Australia | Municipality of Prato | United States of America |
| Considered crashes (with sampling weights) | 235 | 294 | 6088 (265,361) |
| Period | 01/2012–08/2014 | 2018 | 2016–2018 |
| Type of roads | Urban and rural | Only urban | Only urban |
| Included crashes | Hospital admission (non-fatal injury) | Police reported | Police reported |
| Particular characteristic | Only crashes where injured riders were admitted to one of the hospitals within the study area | -- | -- |
| Category 1 | Category 2 | Category 3 | Category 4 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| System would definitely not have applied | System would possibly have applied (the applicability is controversial) | System would probably have applied (technical challenge still needs to be solved) | System would have applied if the technology was activated | |||||||||
| MICIMS | Prato-X | CRSS | MICIMS | Prato-X | CRSS | MICIMS | Prato-X | CRSS | MICIMS | Prato-X | CRSS | |
| ABS | 6.4% | 7.7% | 15.8% | 40.3% | 29.1% | 28.0% | 4.7% | 3.2% | 10.6% | 48.7% | 60.0% | 45.6% |
| MAEB | 44.1% | 33.0% | 32.7% | 22.5% | 28.1% | 44.3% | 26.3% | 31.2% | 8.8% | 7.2% | 7.7% | 14.2% |
| Collision warning | 36.9% | 31.2% | 30.1% | 9.7% | 7.0% | 11.0% | 30.5% | 29.8% | 33.1% | 22.9% | 31.9% | 25.9% |
| Curve warning | 66.1% | 88.1% | 84.2% | 9.3% | 7.4% | 5.7% | 0.0% | 0.0% | 0.0% | 24.6% | 4.6% | 10.1% |
| Curve assist | 54.2% | 60.4% | 70.4% | 16.5% | 32.6% | 11.4% | 4.2% | 2.5% | 7.9% | 25.0% | 4.6% | 10.4% |
| Category 4 | Category 3 + 4 | |||||
|---|---|---|---|---|---|---|
| MICIMS | Prato-X | CRSS | MICIMS | Prato-X | CRSS | |
| Safety Systems Alone | ||||||
| ABS alone (A) | 25.8% | 28.1% | 19.7% | 0.8% | 1.7% | 0.8% |
| MAEB alone (B) | -- | -- | -- | -- | -- | -- |
| CollWarn alone (C) | -- | -- | -- | 0.4% | -- | 1.1% |
| CurveWarn alone (D) | -- | -- | -- | -- | -- | -- |
| CurveAssist alone (E) | 0.4% | -- | 0.3% | 0.4% | -- | 0.5% |
| Two Systems in Combination | ||||||
| A + C | 15.7% | 24.2% | 11.6% | 15.3% | 20.4% | 27.2% |
| D + E | 24.6% | 4.6% | 10.1% | 24.6% | 4.6% | 10.1% |
| C + E | -- | -- | -- | 0.4% | 0.4% | 2.5% |
| Other double combination | -- | -- | -- | -- | -- | -- |
| Three Systems in Combination | ||||||
| A + B + C | 7.2% | 7.7% | 14.2% | 33.5% | 38.9% | 23.0% |
| A + C + E | -- | -- | -- | 3.8% | 2.1% | 5.2% |
| Other triple combination | -- | -- | -- | -- | -- | -- |
| None apply | 26.3% | 35.4% | 44.0% | 20.8% | 31.9% | 29.7% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Terranova, P.; Dean, M.E.; Lucci, C.; Piantini, S.; Allen, T.J.; Savino, G.; Gabler, H.C. Applicability Assessment of Active Safety Systems for Motorcycles Using Population-Based Crash Data: Cross-Country Comparison among Australia, Italy, and USA. Sustainability 2022, 14, 7563. https://doi.org/10.3390/su14137563
Terranova P, Dean ME, Lucci C, Piantini S, Allen TJ, Savino G, Gabler HC. Applicability Assessment of Active Safety Systems for Motorcycles Using Population-Based Crash Data: Cross-Country Comparison among Australia, Italy, and USA. Sustainability. 2022; 14(13):7563. https://doi.org/10.3390/su14137563
Chicago/Turabian StyleTerranova, Paolo, Morgan E. Dean, Cosimo Lucci, Simone Piantini, Trevor J. Allen, Giovanni Savino, and Hampton C. Gabler. 2022. "Applicability Assessment of Active Safety Systems for Motorcycles Using Population-Based Crash Data: Cross-Country Comparison among Australia, Italy, and USA" Sustainability 14, no. 13: 7563. https://doi.org/10.3390/su14137563
APA StyleTerranova, P., Dean, M. E., Lucci, C., Piantini, S., Allen, T. J., Savino, G., & Gabler, H. C. (2022). Applicability Assessment of Active Safety Systems for Motorcycles Using Population-Based Crash Data: Cross-Country Comparison among Australia, Italy, and USA. Sustainability, 14(13), 7563. https://doi.org/10.3390/su14137563