
Reactive UAV Fleet’s Mission Planning in Highly Dynamic and Unpredictable Environments



 , and
, and
Abstract
1. Introduction
- Higher costs for urban goods delivery.
- Nuisance including traffic congestion and crashes.
- Green House Gas (GHG) emissions and local emissions.
- Reduction of the greenfield sites and open spaces (due to the transport infrastructure development).
- Increasing amounts of waste products, such as tires, oil, and other waste products related to maintenance of traditional delivery and transport systems.
- Noise and vibration.
- Technical parameters of UAVs (UAV dimensions, battery capacity, and carrying payload limit).
- Changing weather conditions (the wind speed, wind direction, wind gust, precipitation, icing, turbulence, and air density and temperature).
- Dynamically changing terms of delivery and static or moving obstacles (withdrawing or changing the date and place of deliveries as well as their volume, and collision avoidance).
2. Materials and Methods
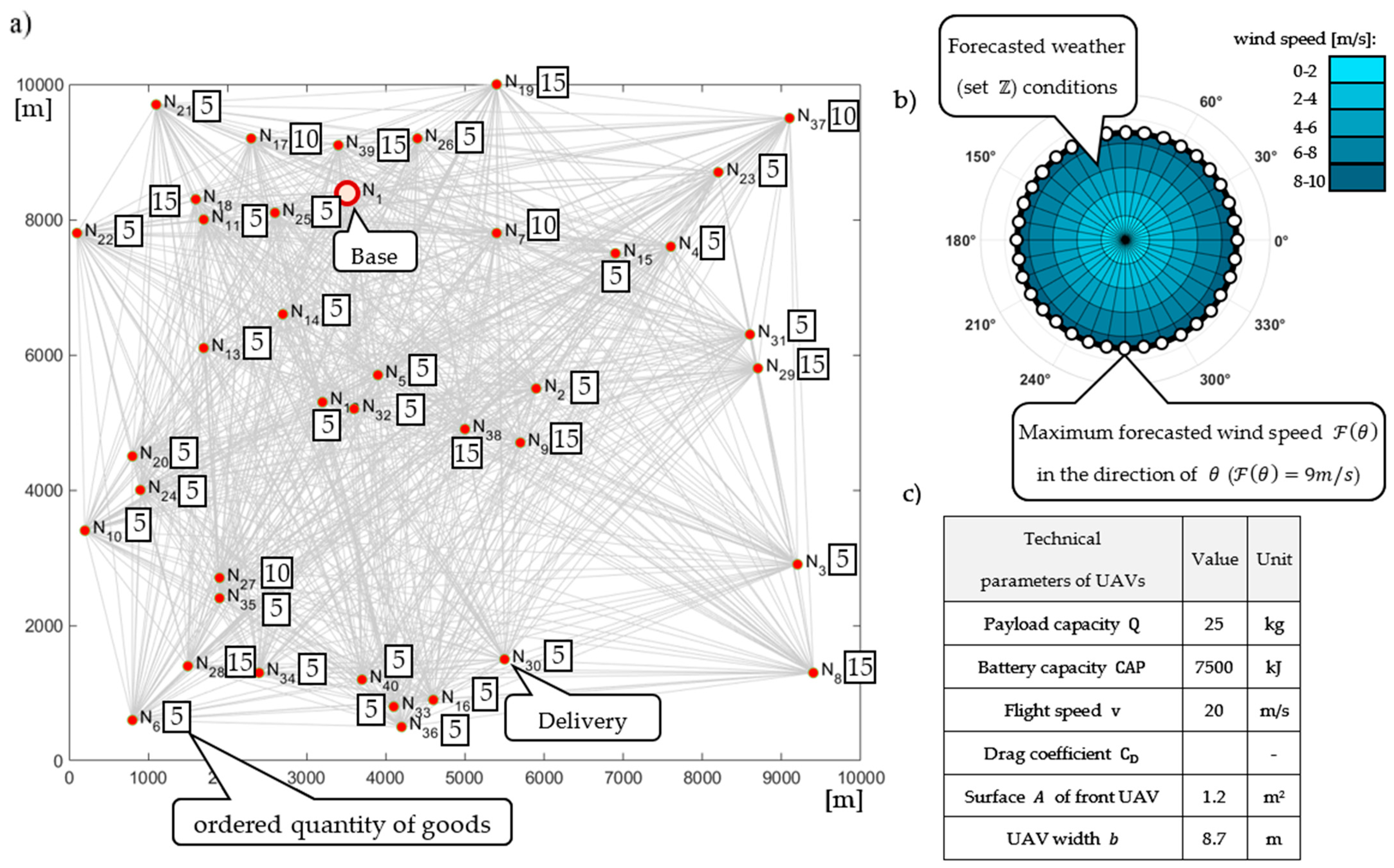
- A set of spatially dispersed delivery points
- A fleet of capacitated UAVs
- A distribution network with distinguished, so-called base nodes, used for loading UAVs and replacing used batteries, as well as a set of edges labeled by travel times linking adjacent nodes.
2.1. General Concept—The Method for Online Routing
2.2. Reactive UAV Fleet Rerouting
2.3. CSP Formulation
2.3.1. Reactive Mission Planning
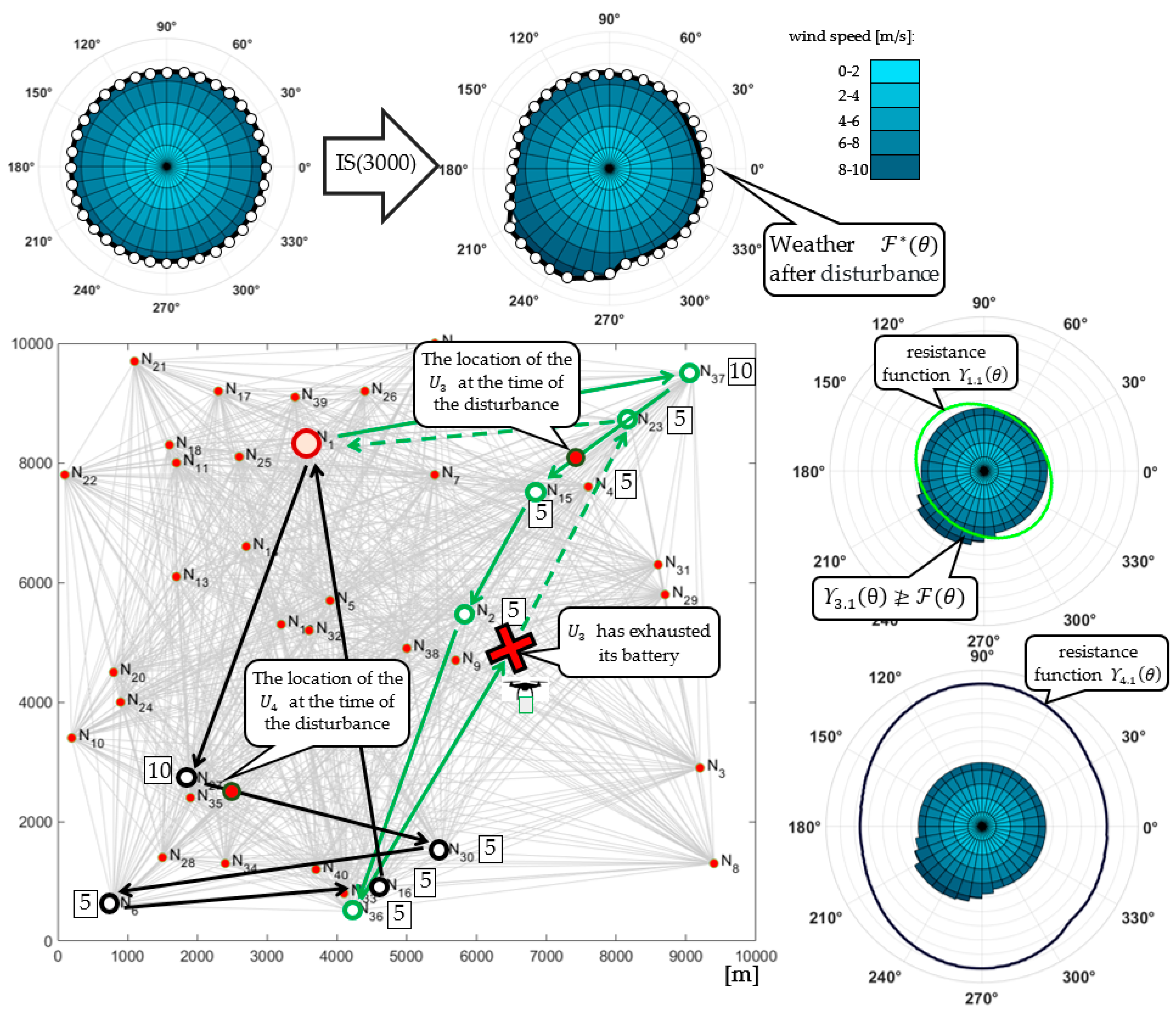
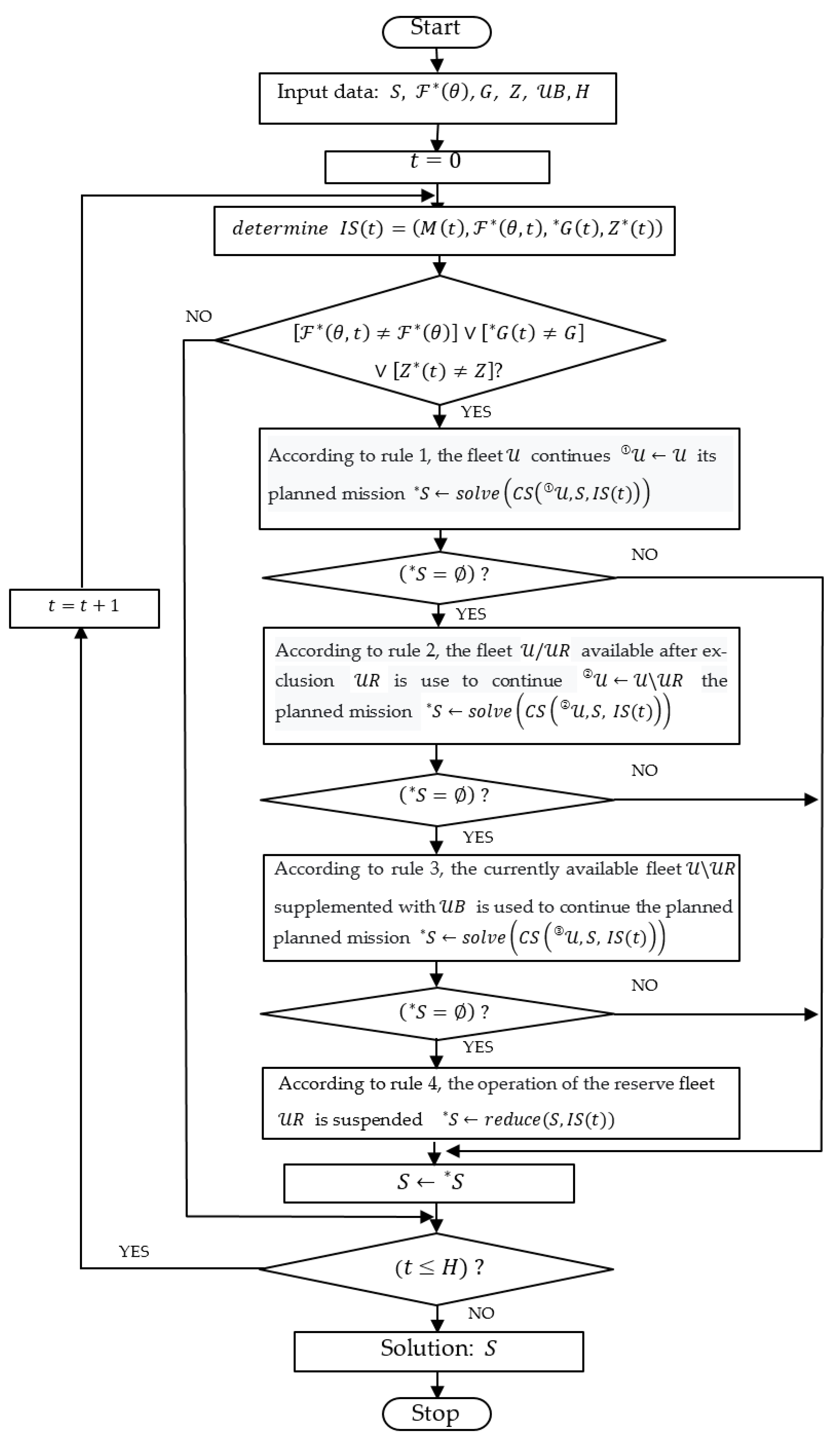
- If the adopted mission plan S is not resistant to disturbance then it should be checked whether it is possible to adapt (re-plan), adjusting it to new conditions. That is, decide whether all UAVs in the air continue their current missions or make their appropriate corrections.
- If there are UAVs (the set ) that cannot continue to fly due to disturbance then they should be returned to the base after it is ensured that airborne UAVs () can take over their tasks.
- If the tasks of the UAVs returning to the base (the set cannot be taken over by UAVs still performing their missions, then it should be checked whether the reserve UAVs available at the base (the set ) can take over their responsibilities. This means the UAVs in the air continue their existing missions, while the reserve UAVs take over the liabilities of the UAVs returned to the base.
- If the reserve UAVs (the set ) are unable to take over the responsibilities of those returned to the base (the set ), then their activity should be suspended until the disturbance is resolved.
2.3.2. Declarative Modelling
| the graph of a distribution network: for sub-mission , where: is the set of nodes, is the set of edges | |
| the demand at node , | |
| the travel distance between nodes , | |
| the travel time between nodes , | |
| the time spent on take-off and landing of a UAV | |
| the time interval at which UAVs can take off from the base | |
| the subset of UAVs carrying out the sub-mission , where: is the k-th UAV | |
| the size of the fleet of UAVs | |
| the state of UAVs mission at the time : | |
| resistance to changes in weather conditions during the execution of the plan of mission | |
| the maximum loading capacity of a UAV | |
| the aerodynamic drag coefficient of a UAV | |
| the front-facing area of a UAV | |
| the empty weight of a UAV | |
| an air density | |
| the gravitational acceleration | |
| the width of a UAV | |
| the maximum energy capacity of a UAV | |
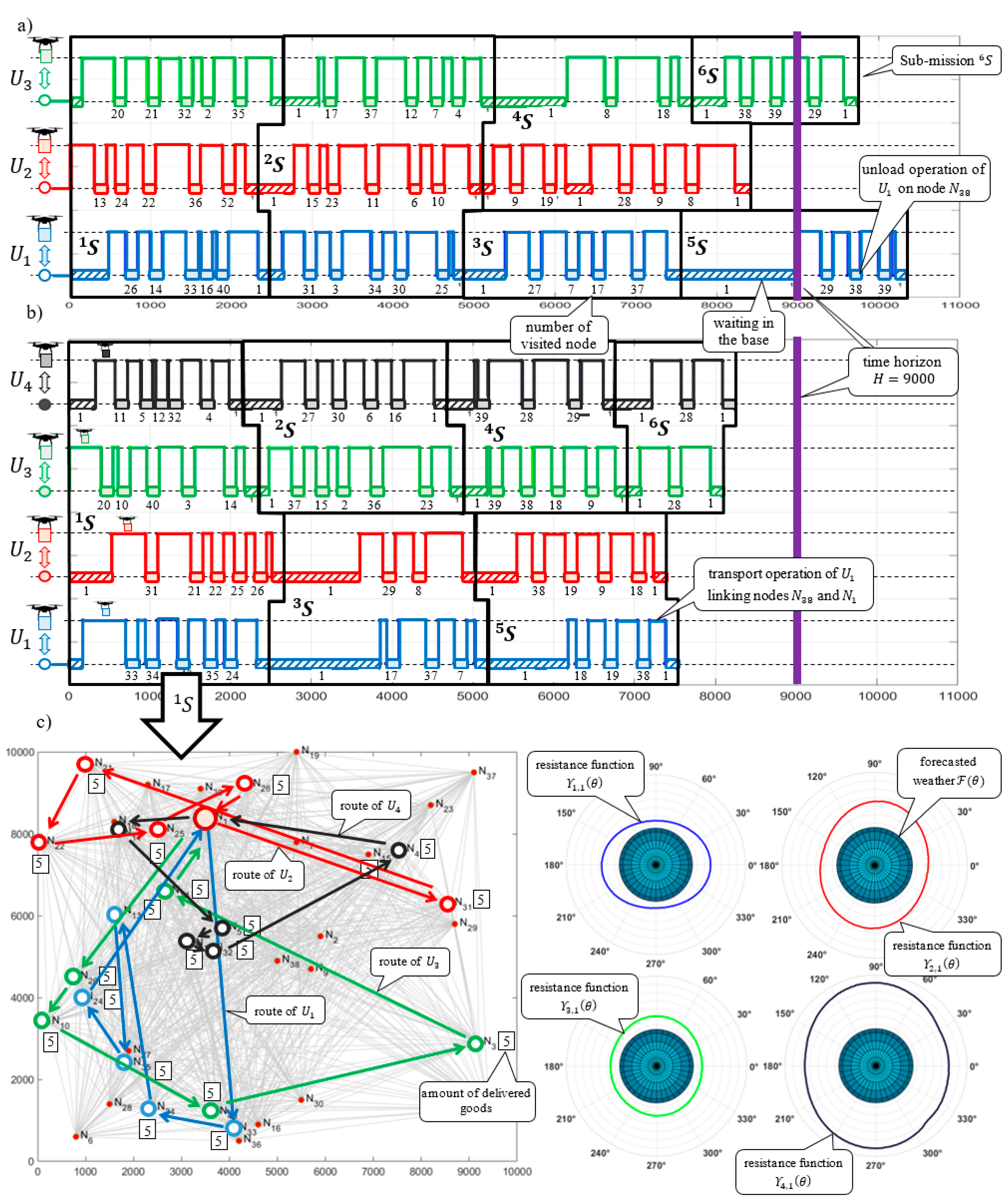
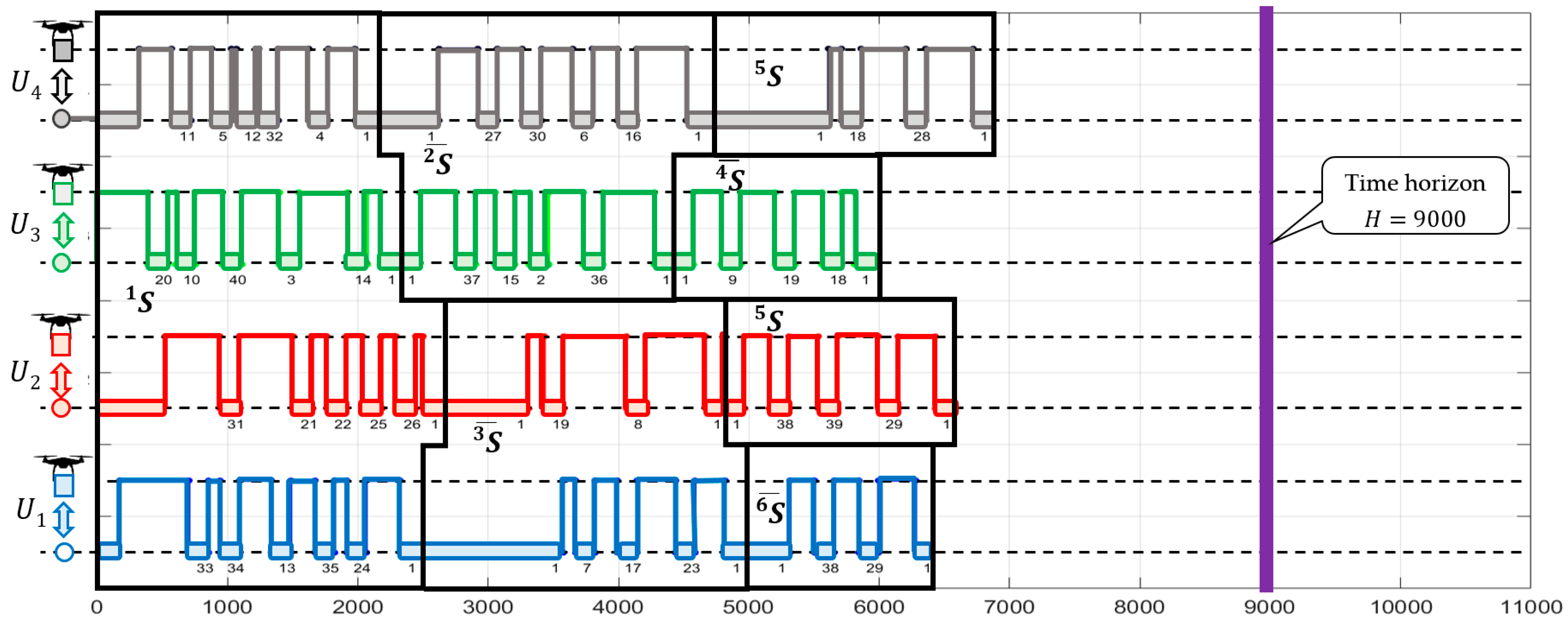
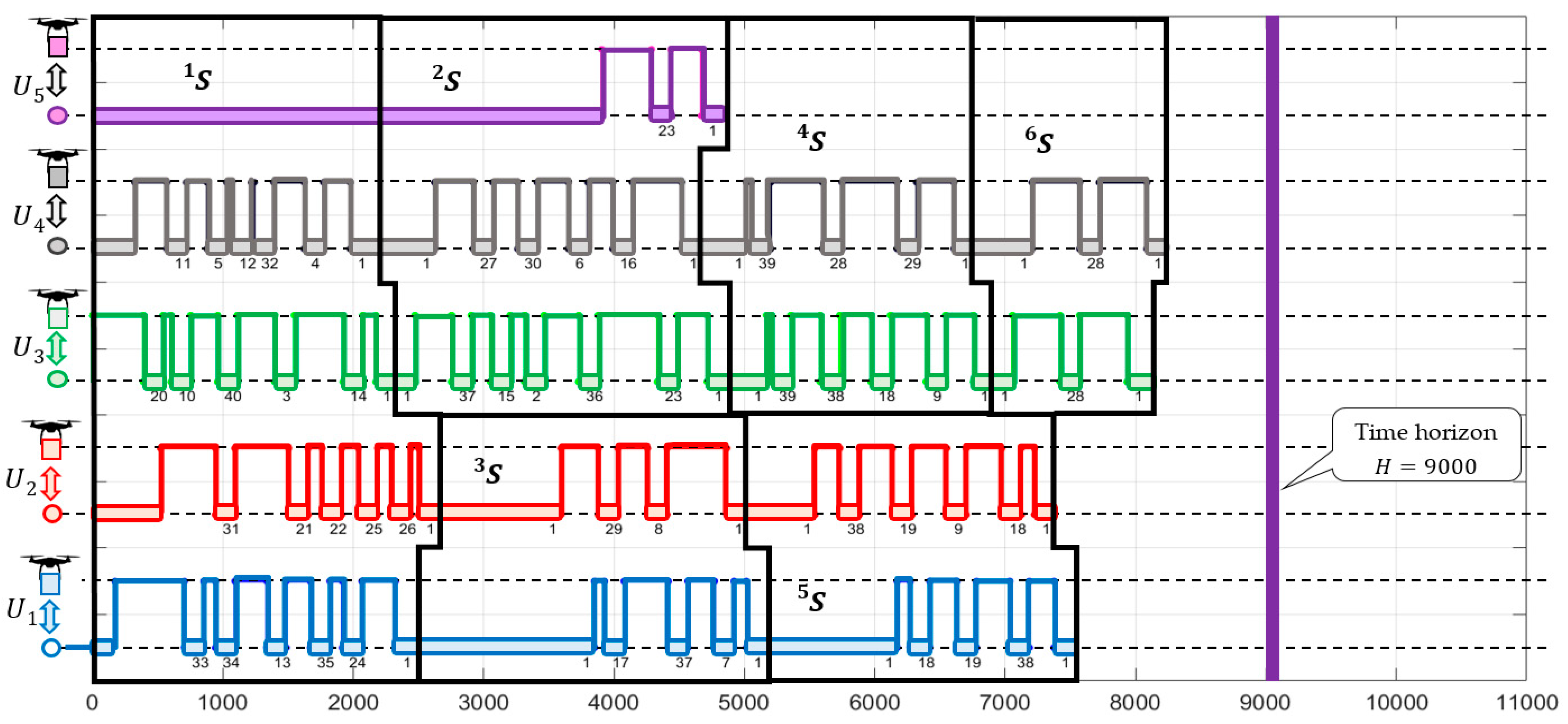
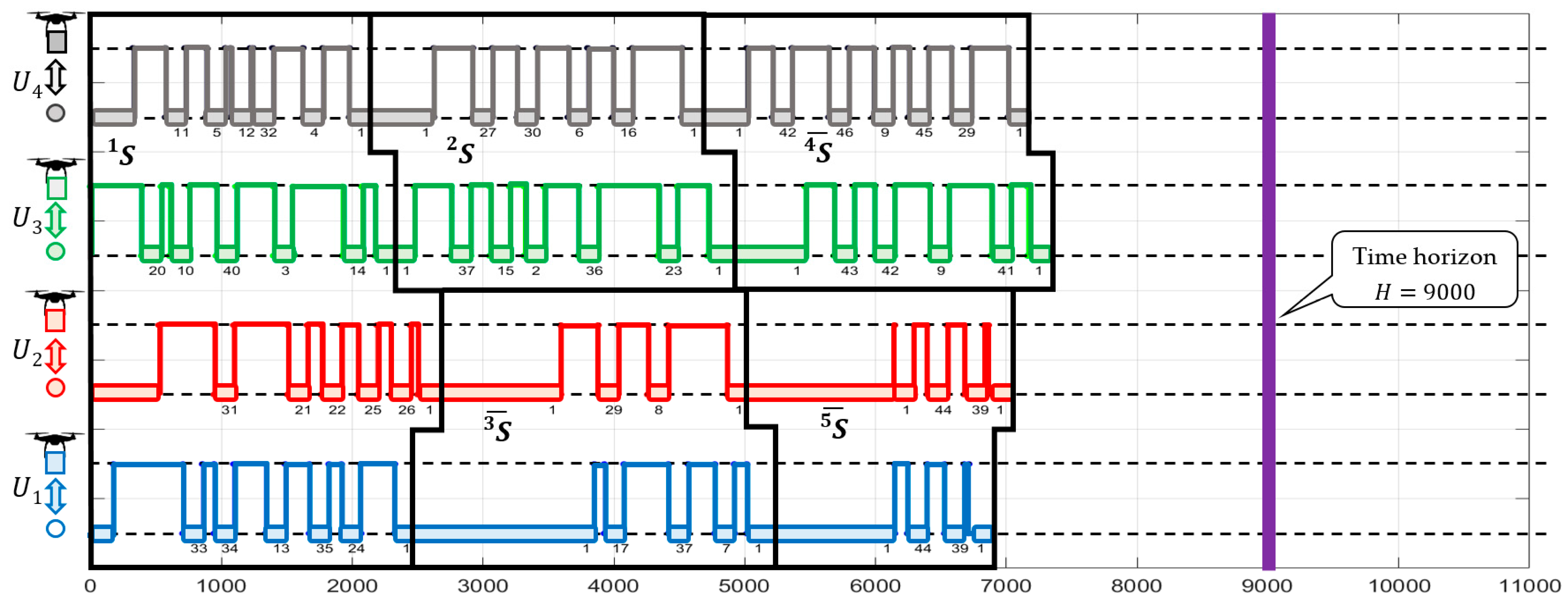
| the time horizon (see Figure 2b—) | |
| the function values of which determine the maximum of forecasted wind speed for given direction | |
| an airspeed of a UAV traveling between nodes , | |
| the heading angle, angle of the airspeed vector when the UAV travels between nodes , | |
| the ground speed of a UAV traveling between nodes , | |
| the course angle, angle of the ground speed vector when the UAV travels between nodes , | |
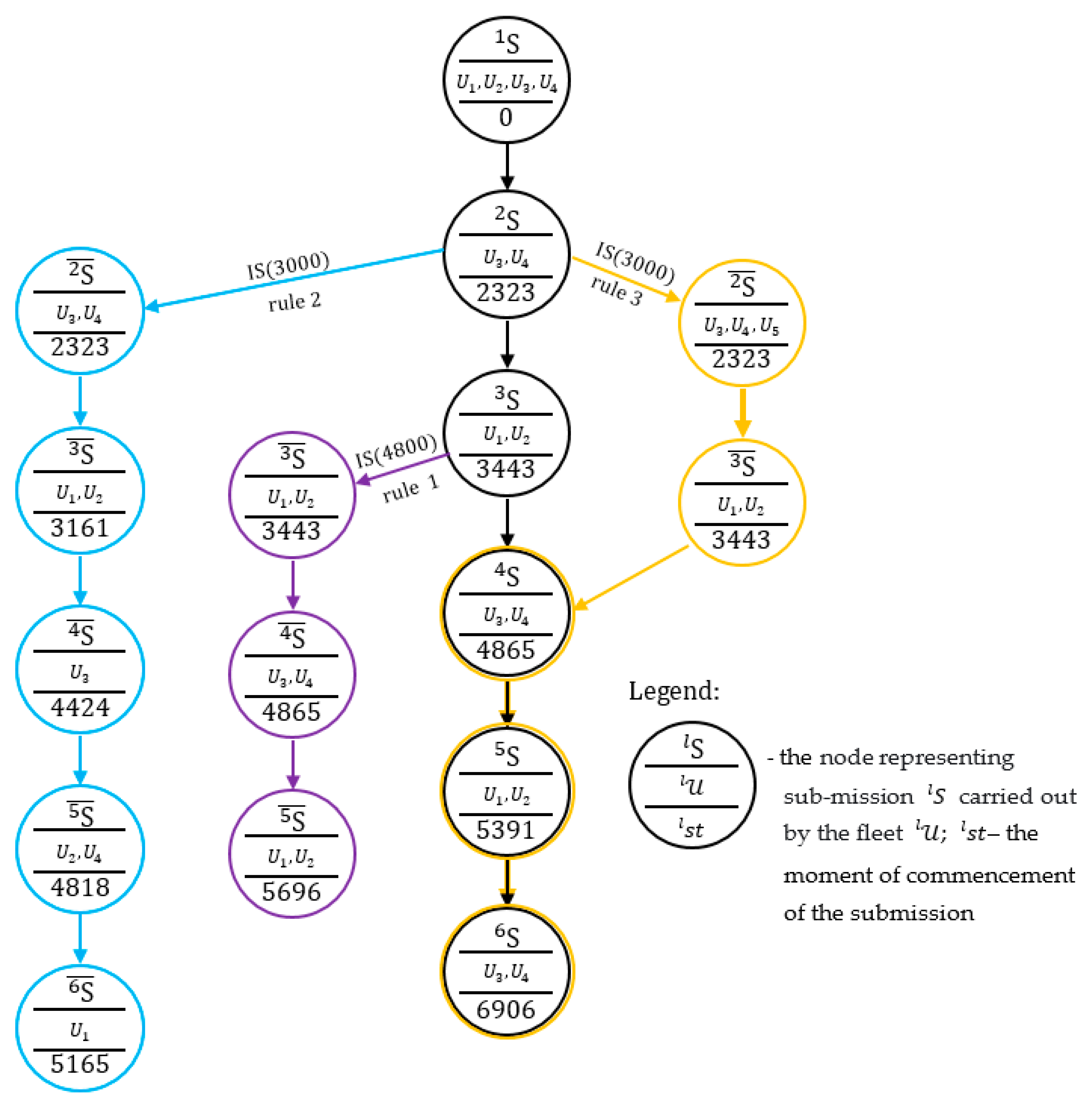
| the plan of sub-mission: when there is no disturbance: : is a sequence of moments (i.e., the fleet schedule): , is the time at which arrives at node , : the set of UAV routes : : is a sequence of weights of delivered goods : , is the weight of goods delivered to node by | |
| the flight mission plan , where: denotes the number of sub-missions. |
| the binary variable used to indicate if travels between nodes ,, after the disturbance occurrence (during sub-mission ) | |
| the time at which arrives at node , after the disturbance occurrence (during sub-mission ) | |
| the weight of freight delivered to node by , after the disturbance occurrence (during sub-mission ) | |
| the weight of freight carried between nodes , by , after the disturbance occurrence (during sub-mission ) | |
| the energy per unit of time consumed by during the flight between nodes , (after the disturbance occurrence) | |
| the total energy consumed by , after the disturbance occurrence (during sub-mission ) | |
| the take-off time of , after the disturbance occurrence (during sub-mission ) | |
| the total weight of freight delivered to node , after the disturbance occurrence (during sub-mission ) | |
| the route of after the disturbance occurrence (during sub-mission ), , , . | |
| is a sequence of moments , schedule of the fleet after the disturbance occurrence | |
- Routes. Relationships between the variables describing UAV take-off times/mission start times and task order:
- 2.
- Delivery of freight. Relationships between variables describing already delivered and requested amount of freight:
- 3.
- Energy consumption. In order to ensure the waterproofness of the sub-mission (i.e., its robustness to weather condition changes ), it is necessary that the amount of energy required to complete the task carried out by a UAV does not exceed the capacity of its battery.
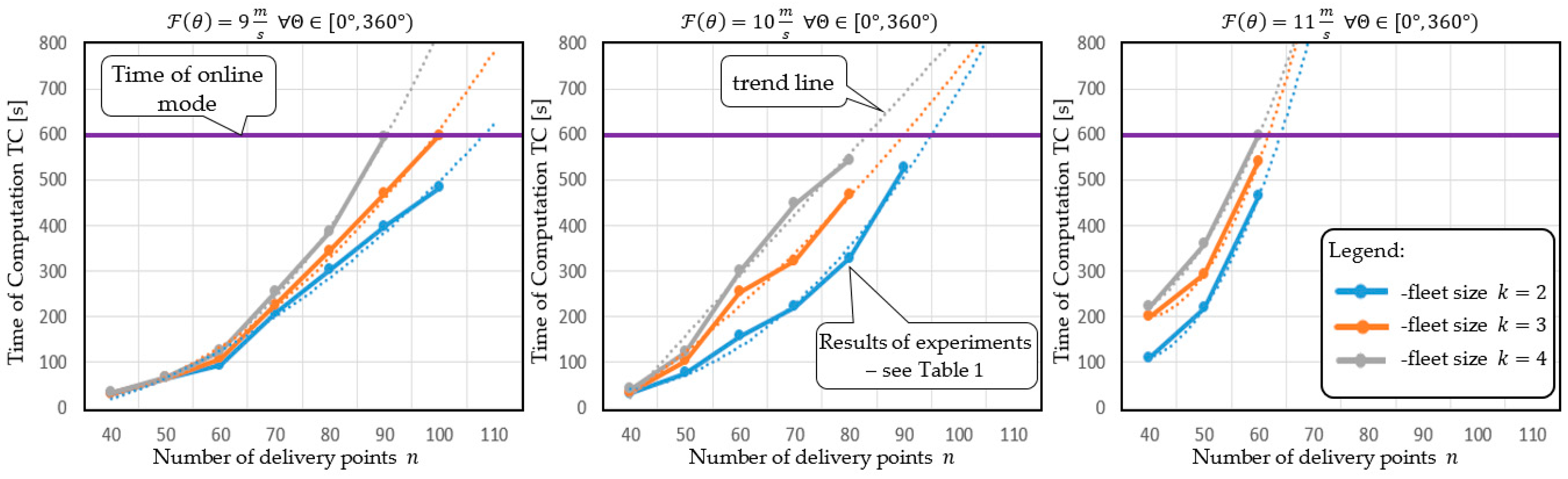
3. Results-Computational Experiments
4. Discussion
- Emergency flight plan determination (beyond the allowable range defined by the weather change resistance functions .
- Determining the flight plan in the event of a sudden change of orders (change of the sequence ).
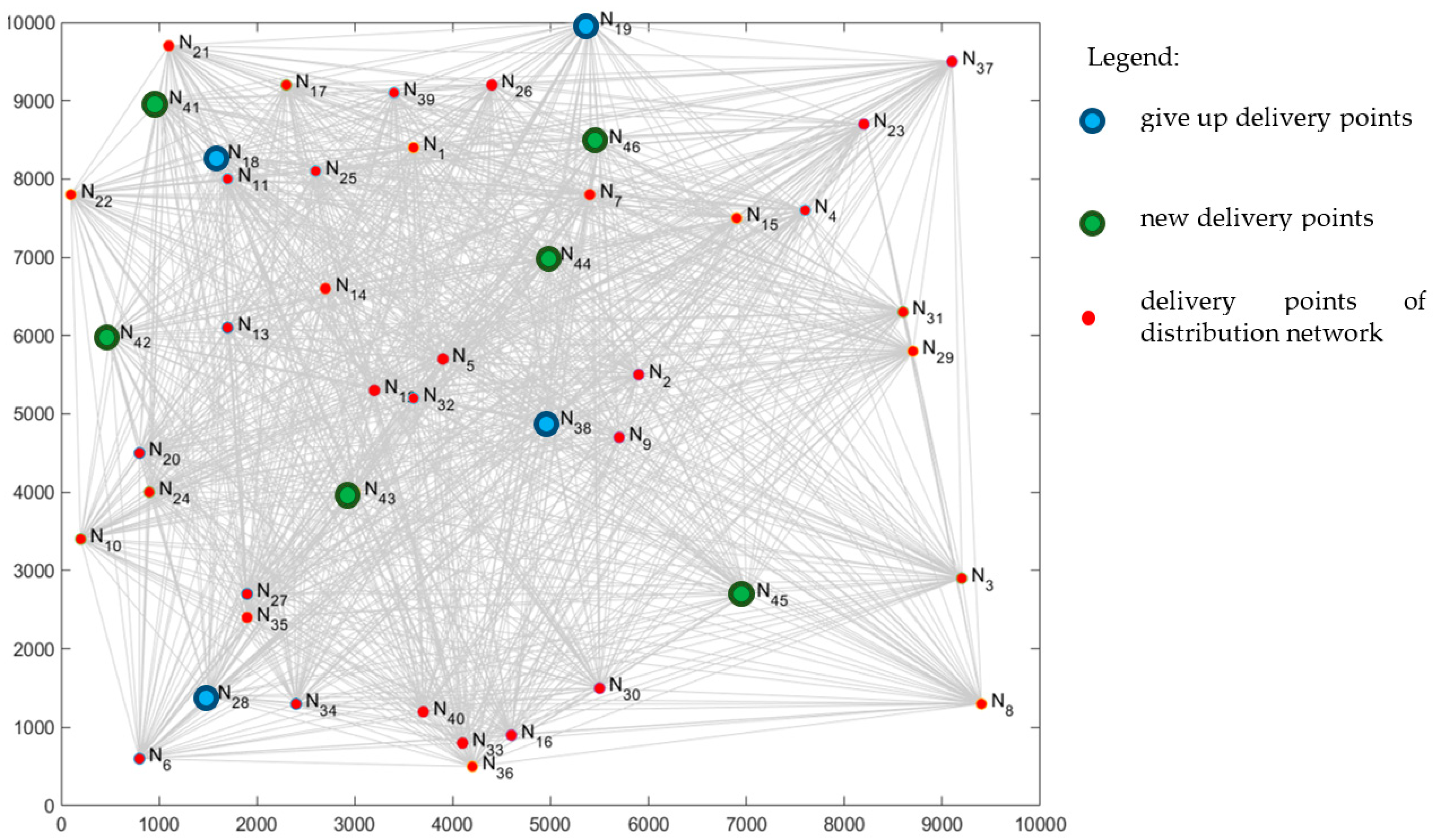
- Determining the flight plan in the event of a sudden change in the structure of the distribution network—i.e., the appearance of new or cancelation of previously placed orders (resulting in the change of network structure).
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Janjevic, M.; Knoppen, D.; Winkenbach, M. Integrated decision-making framework for urban freight logistics policy-making. Transp. Res. Part D Transp. Environ. 2019, 72, 333–357. [Google Scholar] [CrossRef]
- Taniguchi, E.; Thompson, R.G.; Qureshi, A.G. Modelling city logistics using recent innovative technologies. Transp. Res. Procedia 2020, 46, 3–12. [Google Scholar] [CrossRef]
- Hesse, M. City Logistics: Network modelling and Intelligent Transport Systems. J. Transp. Geogr. 2002, 10, 158–159. [Google Scholar] [CrossRef]
- Iwan, S. Adaptative Approach to Implementing Good Practices to Support Environmentally Friendly Urban Freight Transport Management. Procedia-Soc. Behav. Sci. 2014, 151, 70–86. [Google Scholar] [CrossRef]
- Bandeira, R.A.; D’Agosto, M.A.; Ribeiro, S.K.; Bandeira, A.P.; Goes, G.V. A fuzzy multi-criteria model for evaluating sustainable urban freight transportation operations. J. Clean. Prod. 2018, 184, 727–739. [Google Scholar] [CrossRef]
- Kiba-Janiak, M. Urban freight transport in city strategic planning. Res. Transp. Bus. Manag. 2017, 24, 4–16. [Google Scholar] [CrossRef]
- Kiba-Janiak, M. EU cities’ potentials for formulation and implementation of sustainable urban freight transport strategic plans. Transp. Res. Procedia 2019, 39, 150–159. [Google Scholar] [CrossRef]
- Wątróbski, J.; Małecki, K.; Kijewska, K.; Iwan, S.; Karczmarczyk, A.; Thompson, R.G. Multi-Criteria Analysis of Electric Vans for City Logistics. Sustainability 2017, 9, 1453. [Google Scholar] [CrossRef]
- Kijewska, K.; Johansen, B.G. Comparative Analysis of Activities for More Environmental Friendly Urban Freight Transport Systems in Norway and Poland. Procedia-Soc. Behav. Sci. 2014, 151, 142–157. [Google Scholar] [CrossRef][Green Version]
- Quak, H.; Nesterova, N.; van Rooijen, T.; Dong, Y. Zero Emission City Logistics: Current Practices in Freight Electromobility and Feasibility in the Near Future. Transp. Res. Procedia 2016, 14, 1506–1515. [Google Scholar] [CrossRef]
- Quak, H.; Kok, R.; den Boer, E. The Future of City Logistics—Trends and Developments Leading toward a Smart and Zero-Emission System. In City Logistics 1: New Opportunities and Challenges; Taniguchi, E., Thompson, R.G., Eds.; Wiley: Hoboken, NJ, USA, 2018; pp. 125–146. [Google Scholar] [CrossRef]
- Taniguchi, E.; Dupas, R.; Deschamps, J.-C.; Qureshi, A.G. Concepts of an Integrated Platform for Innovative City Logistics with Urban Consolidation Centers and Transshipment Points. In City Logistics 3; Wiley: Hoboken, NJ, USA, 2018; pp. 129–146. [Google Scholar]
- Patella, S.; Grazieschi, G.; Gatta, V.; Marcucci, E.; Carrese, S. The Adoption of Green Vehicles in Last Mile Logistics: A Systematic Review. Sustainability 2020, 13, 6. [Google Scholar] [CrossRef]
- Hu, W.; Dong, J.; Hwang, B.-G.; Ren, R.; Chen, Z. A Scientometrics Review on City Logistics Literature: Research Trends, Advanced Theory and Practice. Sustainability 2019, 11, 2724. [Google Scholar] [CrossRef]
- Aurambout, J.-P.; Gkoumas, K.; Ciuffo, B. Last mile delivery by drones: An estimation of viable market potential and access to citizens across European cities. Eur. Transp. Res. Rev. 2019, 11, 30. [Google Scholar] [CrossRef]
- Park, J.; Kim, S.; Suh, K. A Comparative Analysis of the Environmental Benefits of Drone-Based Delivery Services in Urban and Rural Areas. Sustainability 2018, 10, 888. [Google Scholar] [CrossRef]
- Stolaroff, J.K.; Samaras, C.; O’Neill, E.R.; Lubers, A.; Mitchell, A.S.; Ceperley, D. Energy use and life cycle greenhouse gas emissions of drones for commercial package delivery. Nat. Commun. 2018, 9, 409. [Google Scholar] [CrossRef] [PubMed]
- Liu, M.; Liu, X.; Zhu, M.; Zheng, F. Stochastic Drone Fleet Deployment and Planning Problem Considering Multiple-Type Delivery Service. Sustainability 2019, 11, 3871. [Google Scholar] [CrossRef]
- Troudi, A.; Addouche, S.-A.; Sofiene, D.; El Mhamedi, A. Sizing of the Drone Delivery Fleet Considering Energy Autonomy. Sustainability 2018, 10, 3344. [Google Scholar] [CrossRef]
- Boysen, N.; Briskorn, D.; Fedtke, S.; Schwerdfeger, S. Drone delivery from trucks: Drone scheduling for given truck routes. Networks 2018, 72, 506–527. [Google Scholar] [CrossRef]
- Dorling, K.; Heinrichs, J.; Messier, G.G.; Magierowski, S. Vehicle Routing Problems for Drone Delivery. IEEE Trans. Syst. Man, Cybern. Syst. 2017, 47, 70–85. [Google Scholar] [CrossRef]
- Thibbotuwawa, A.; Nielsen, P.; Zbigniew, B.; Bocewicz, G. Energy Consumption in Unmanned Aerial Vehicles: A Review of Energy Consumption Models and Their Relation to the UAV Routing. Adv. Intell. Syst. Comput. 2018, 173–184. [Google Scholar] [CrossRef]
- Thibbotuwawa, A.; Bocewicz, G.; Radzki, G.; Nielsen, P.; Banaszak, Z. UAV Mission Planning Resistant to Weather Uncertainty. Sensors 2020, 20, 515. [Google Scholar] [CrossRef] [PubMed]
- Sung, I.; Nielsen, P. Speed optimization algorithm with routing to minimize fuel consumption under time-dependent travel conditions. Prod. Manuf. Res. 2020, 8, 1–19. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V.; Huang, C. A New Parcel Delivery System with Drones and a Public Train. J. Intell. Robot. Syst. 2020, 100, 1341–1354. [Google Scholar] [CrossRef]
- Câmara, D. Cavalry to the rescue: Drones fleet to help rescuers operations over disasters scenarios. In Proceedings of the 2014 IEEE Conference on Antenna Measurements & Applications (CAMA), Antibes Juan-les-Pins, France, 16–19 November 2014; pp. 1–4. [Google Scholar]
- Stodola, P.; Drozd, J.; Mazal, J.; Hodický, J.; Procházka, D. Cooperative Unmanned Aerial System Reconnaissance in a Complex Urban Environment and Uneven Terrain. Sensors 2019, 19, 3754. [Google Scholar] [CrossRef] [PubMed]
- Bekhti, M.; Achir, N.; Boussetta, K.; Abdennebi, M. Drone Package Delivery: A Heuristic approach for UAVs path planning and tracking. EAI Endorsed Trans. Internet Things 2017, 3, 153048. [Google Scholar] [CrossRef]
- Erdelj, M.; Natalizio, E. UAV-assisted disaster management: Applications and open issues. In Proceedings of the 2016 International Conference on Computing, Networking and Communications (ICNC), Kauai, HI, USA, 22–25 February 2016; pp. 1–5. [Google Scholar]
- Hildmann, H.; Kovacs, E. Review: Using Unmanned Aerial Vehicles (UAVs) as Mobile Sensing Platforms (MSPs) for Disaster Response, Civil Security and Public Safety. Drones 2019, 3, 59. [Google Scholar] [CrossRef]
- Thibbotuwawa, A.; Bocewicz, G.; Zbigniew, B.; Nielsen, P. A Solution Approach for UAV Fleet Mission Planning in Changing Weather Conditions. Appl. Sci. 2019, 9, 3972. [Google Scholar] [CrossRef]
- Penin, B.; Giordano, P.R.; Chaumette, F. Vision-Based Reactive Planning for Aggressive Target Tracking while Avoiding Colli-sions and Occlusions. IEEE Robot. Autom. Lett. 2018, 3, 3725–3732. [Google Scholar] [CrossRef]
- Weinstein, A.; Schumacher, C. UAV Scheduling via the Vehicle Routing Problem with Time Windows. In Proceedings of the AIAA Infotech@Aerospace 2007 Conference and Exhibit, Rohnert Park, CA, USA, 7–10 May 2007. [Google Scholar]
- Radzki, G.; Nielsen, P.; Bocewicz, G.; Banaszak, Z. A Proactive Approach to Resistant UAV Mission Planning. In Automation 2020: Towards Industry of the Future; Szewczyk, R., Zieliński, C., Kaliczyńska, M., Eds.; Springer: Cham, Germany, 2020; pp. 112–124. [Google Scholar]
- Hall, J.; Anderson, D. Reactive route selection from pre-calculated trajectories—Application to micro-UAV path planning. Aeronaut. J. 2011, 115, 635–640. [Google Scholar] [CrossRef]
- Wallar, A.; Plaku, E.; Sofge, D.A. Reactive Motion Planning for Unmanned Aerial Surveillance of Risk-Sensitive Areas. IEEE Trans. Autom. Sci. Eng. 2015, 12, 969–980. [Google Scholar] [CrossRef]
- Shirani, R.; St-Hilaire, M.; Kunz, T.; Zhou, Y.; Li, J.; Lamont, L. On the Delay of Reactive-Greedy-Reactive Routing in Unmanned Aeronautical Ad-hoc Networks. Procedia Comput. Sci. 2012, 10, 535–542. [Google Scholar] [CrossRef]
- Coelho, B.N.; Coelho, V.N.; Coelho, I.M.; Ochi, L.S.; Haghnazar, R.; Zuidema, D.; Lima, M.S.; da Costa, A.R. A multi-objective green UAV routing problem. Comput. Oper. Res. 2017, 88, 306–315. [Google Scholar] [CrossRef]
- Belkhouche, F. Reactive optimal UAV motion planning in a dynamic world. Robot. Auton. Syst. 2017, 96, 114–123. [Google Scholar] [CrossRef]
- Lohatepanont, M.; Barnhart, C. Airline Schedule Planning: Integrated Models and Algorithms for Schedule Design and Fleet Assignment. Transp. Sci. 2004, 38, 19–32. [Google Scholar] [CrossRef]
- Estrada, M.A.R.; Ndoma, A. The uses of unmanned aerial vehicles –UAV’s- (or drones) in social logistic: Natural disasters response and humanitarian relief aid. Procedia Comput. Sci. 2019, 149, 375–383. [Google Scholar] [CrossRef]
- Valavanis, K.P.; Vachtsevanos, G.J. (Eds.) Handbook of Unmanned Aerial Vehicles; Springer: Dordrecht, The Netherlands, 2015. [Google Scholar] [CrossRef]
- Avellar, G.S.C.; Pereira, G.A.S.; Pimenta, L.C.D.A.; Iscold, P. Multi-UAV Routing for Area Coverage and Remote Sensing with Minimum Time. Sensors 2015, 15, 27783–27803. [Google Scholar] [CrossRef] [PubMed]
- Pugliese, L.D.P.; Guerriero, F.; Zorbas, D.; Razafindralambo, T. Modelling the mobile target covering problem using flying drones. Optim. Lett. 2016, 10, 1021–1052. [Google Scholar] [CrossRef]
- Ham, A.M. Integrated scheduling of m-truck, m-drone, and m-depot constrained by time-window, drop-pickup, and m-visit using constraint programming. Transp. Res. Part C Emerg. Technol. 2018, 91, 1–14. [Google Scholar] [CrossRef]
- Al-Mousa, A.; Sababha, B.H.; Al-Madi, N.; Barghouthi, A.; Younisse, R. UTSim: A framework and simulator for UAV air traffic integration, control, and communication. Int. J. Adv. Robot. Syst. 2019, 16. [Google Scholar] [CrossRef]
- Hentati, A.I.; Krichen, L.; Fourati, M.; Fourati, L.C. Simulation Tools, Environments and Frameworks for UAV Systems Performance Analysis. In Proceedings of the 2018 14th International Wireless Communications & Mobile Computing Conference (IWCMC), St. Raphael Resort & Marina, Cyprus, 25–29 June 2018; pp. 1495–1500. [Google Scholar]
- Bithas, P.S.; Michailidis, E.T.; Nomikos, N.; Vouyioukas, D.; Kanatas, A.G. A Survey on Machine-Learning Techniques for UAV-Based Communications. Sensors 2019, 19, 5170. [Google Scholar] [CrossRef]
- Schermer, D.; Moeini, M.; Wendt, O. A hybrid VNS/Tabu search algorithm for solving the vehicle routing problem with drones and en route operations. Comput. Oper. Res. 2019, 109, 134–158. [Google Scholar] [CrossRef]
- Viloria, D.R.; Solano-Charris, E.L.; Muñoz-Villamizar, A.; Montoya-Torres, J.R. Unmanned aerial vehicles/drones in vehicle routing problems: A literature review. Int. Trans. Oper. Res. 2021, 28, 1626–1657. [Google Scholar] [CrossRef]
- Kashyap, A.; Ghose, D.; Menon, P.P.; Sujit, P.; Das, K. UAV Aided Dynamic Routing of Resources in a Flood Scenario. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 328–335. [Google Scholar]
- Sampedro, C.; Bavle, H.; Sanchez-Lopez, J.L.; Fernandez, R.A.S.; Rodriguez-Ramos, A.; Molina, M.; Campoy, P. A flexible and dynamic mission planning architecture for UAV swarm coordination. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 355–363. [Google Scholar]
- Traverso, P.; Giunchiglia, E.; Spalazzi, L.; Giunchiglia, F. Formal Theories for Reactive Planning Systems: Some Considerations Raised from an Experimental Application; AAAI Technical Report WS-96-07; 1996; pp. 127–136. Available online: https://www.researchgate.net/publication/2270270_Formal_Theories_for_Reactive_Planning_Systems_some_considerations_raised_from_an_experimental_application (accessed on 6 May 2021).
- Oubbati, O.S.; Chaib, N.; Lakas, A.; Bitam, S.; Lorenz, P. U2RV: UAV-assisted reactive routing protocol for VANETs. Int. J. Commun. Syst. 2020, 33, e4104. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Lakas, A.; Güneş, M.; Zhou, F.; Yagoubi, M.B. UAV-assisted reactive routing for urban VANETs. Proc. Symp. Appl. Comput. 2017, 651–653. [Google Scholar]
- Li, J.; Zhang, R.; Yang, Y. Multi-AUV autonomous task planning based on the scroll time domain quantum bee colony optimization algorithm in uncertain environment. PLoS ONE 2017, 12, e0188291. [Google Scholar] [CrossRef]
- Bernard, J.; Lacher, A.R. Flight Trajectory Options to Mitigate the Impact of Unmanned Aircraft Systems (UAS) Contingency Trajectories—A Concept of Operations, MITRE PRODUCT, Center for Advanced Aviation System Development. 2013. Available online: https://www.mitre.org/sites/default/files/publications/pr-13-3449-flight-trajectory-options-mitigate-impact-of-UAS.pdf (accessed on 6 May 2021).
- Khan, M.A.; Khan, I.U.; Safi, A.; Quershi, I.M. Dynamic Routing in Flying Ad-Hoc Networks Using Topology-Based Routing Protocols. Drones 2018, 2, 27. [Google Scholar] [CrossRef]
- Bocewicz, G.; Banaszak, Z.; Rudnik, K.; Smutnicki, C.; Witczak, M.; Wójcik, R. An ordered-fuzzy-numbers-driven approach to the milk-run routing and scheduling problem. J. Comput. Sci. 2021, 49, 101288. [Google Scholar] [CrossRef]
- Bocewicz, G.; Banaszak, Z.; Rudnik, K.; Witczak, M.; Smutnicki, C.; Wikarek, J. Milk-run Routing and Scheduling Subject to Fuzzy Pickup and Delivery Time Constraints: An Ordered Fuzzy Numbers Approach. In Proceedings of the 2020 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Glasgow, UK, 19–24 July 2020; pp. 1–10. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Sub-Missions | Number of Sub-Missions | Number of Sub-Missions | |||||
|---|---|---|---|---|---|---|---|
| [s] | [s] | [s] | |||||
| 40 | 2 | 9 | 30.48 | 10 | 32.36 | 12 | 33.54 |
| 3 | 8 | 32.39 | 9 | 34.79 | 10 | 40.60 | |
| 4 | 7 | 110.64 | 8 | 200.16 | 9 | 221.32 | |
| 50 | 2 | 14 | 65.43 | 14 | 66.05 | 15 | 66.30 |
| 3 | 12 | 76.51 | 13 | 102.72 | 15 | 122.54 | |
| 4 | 11 | 219.03 | 11 | 293.16 | 12 | 360.92 | |
| 60 | 2 | 13 | 93.12 | 17 | 108.14 | 15 | 125.26 |
| 3 | 15 | 157.14 | 16 | 253.91 | 17 | 300.65 | |
| 4 | 14 | 464.70 | 15 | 541.12 | 16 | 598.24 | |
| 70 | 2 | 22 | 208.10 | 26 | 225.85 | 29 | 254.21 |
| 3 | 21 | 221.42 | 22 | 322.41 | 24 | 448.48 | |
| 4 | ✖ | t > 600 | ✖ | t > 600 | ✖ | t > 600 | |
| 80 | 2 | 20 | 302.48 | 29 | 345.20 | 29 | 386.21 |
| 3 | 23 | 328.01 | 24 | 469.14 | 25 | 544.57 | |
| 4 | ✖ | t > 600 | ✖ | t > 600 | ✖ | t > 600 | |
| 90 | 2 | 27 | 398.89 | 31 | 471.75 | ✖ | t > 600 |
| 3 | 21 | 526.24 | ✖ | t > 600 | ✖ | t > 600 | |
| 4 | ✖ | t > 600 | ✖ | t > 600 | ✖ | t > 600 | |
| 100 | 2 | 29 | 483.68 | 32 | 598.64 | ✖ | t > 600 |
| 3 | ✖ | t > 600 | ✖ | t > 600 | ✖ | t > 600 | |
| 4 | ✖ | t > 600 | ✖ | t> 600 | ✖ | t > 600 | |
| 110 | 2 | ✖ | t > 600 | ✖ | t> 600 | ✖ | t > 600 |
| 3 | ✖ | t > 600 | ✖ | t > 600 | ✖ | t > 600 | |
| 4 | ✖ | t > 600 | ✖ | t > 600 | ✖ | t > 600 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Radzki, G.; Nielsen, I.; Golińska-Dawson, P.; Bocewicz, G.; Banaszak, Z. Reactive UAV Fleet’s Mission Planning in Highly Dynamic and Unpredictable Environments. Sustainability 2021, 13, 5228. https://doi.org/10.3390/su13095228
Radzki G, Nielsen I, Golińska-Dawson P, Bocewicz G, Banaszak Z. Reactive UAV Fleet’s Mission Planning in Highly Dynamic and Unpredictable Environments. Sustainability. 2021; 13(9):5228. https://doi.org/10.3390/su13095228
Chicago/Turabian StyleRadzki, Grzegorz, Izabela Nielsen, Paulina Golińska-Dawson, Grzegorz Bocewicz, and Zbigniew Banaszak. 2021. "Reactive UAV Fleet’s Mission Planning in Highly Dynamic and Unpredictable Environments" Sustainability 13, no. 9: 5228. https://doi.org/10.3390/su13095228
APA StyleRadzki, G., Nielsen, I., Golińska-Dawson, P., Bocewicz, G., & Banaszak, Z. (2021). Reactive UAV Fleet’s Mission Planning in Highly Dynamic and Unpredictable Environments. Sustainability, 13(9), 5228. https://doi.org/10.3390/su13095228