1. Introduction
According to the Council of Logistics Management [
1], “Logistics is that part of the supply chain process that plans, implements, and controls the flow and storage of goods, services, and related information from the point of origin to the point of consumption in order to meet customer’s requirements”. One of the most important objectives facing supply chain management (SCM) is to design network flow models that can minimize costs and, at the same time, consider the sustainability and social issues embedded in their model formulation. A detailed study of modeling approaches for evaluating and planning city logistics measures can be found in Taniguchi et al. [
2], Quak and Koster [
3], Crainic et al. [
4], Crainic et al. [
5], Ardakani and Soltanmohammadi [
6], Koberg and Longoni [
7], Ghadimi et al. [
8] and the reference therein.
In supply chain management (SCM), there are many situations in which we need to find the shortest path from one node to another node. For example, delivering a product from one location to another location requires finding the shortest path from one node to another node. Some of the inventory decision models require the use of shortest path within a network. Scheduling problems require the use of shortest path. Similarly, many other SCM optimization problems require the use of shortest path. Finding the shortest path will not only reduce the economic cost it even assists in the reduction of carbon dioxide emission in the environment [
9,
10,
11,
12]. Several algorithms have been proposed in the literature to solve shortest path problems. But, in general, all existing algorithms have been developed by considering the assumption that the arc cost between two nodes is precisely known, i.e., the cost between two nodes can be represented by a positive real number. However, in real-life problems, the cost between two nodes may not be known precisely. For example, the statement, “The distance between two locations is approximately 50 km” cannot be represented by the positive real number 50. To solve such real-life problems, in the literature, fuzzy set and its various extensions have been used to represent imprecise distance. Hence, in the literature, various algorithms have been developed to solve such shortest path problems in which the distance between two locations is either represented by fuzzy set or any of its extensions. In this paper, an efficient approach for solving fuzzy shortest path problems is proposed.
2. Literature Review
This section presents a brief review of some recently proposed methods for solving such shortest path problems in which distance between every two nodes is either represented by a fuzzy number or any of its extensions. For a detailed study, the authors are suggested to read Broumi et al. [
13] and the reference therein.
Mukherjee [
14] proposed the concept of intuitionistic fuzzy shortest path problems (shortest path problems in which the distance between two nodes is represented by an intuitionistic fuzzy number). Mukherjee [
14] also proposed an intuitionistic fuzzy Dijkstra’s algorithm to solve intuitionistic fuzzy shortest path problems.
Niroomand et al. [
15] claimed that until now no one has used the extension principle to find the fuzzy optimal solution of fuzzy shortest path problems. Niroomand et al. [
15] proposed an approach based upon the extension principle to solve fuzzy shortest path problems. In Niroomand et al.’s approach [
15] firstly, a fuzzy mathematical programming problem is obtained that corresponds to the considered fuzzy shortest path problem. Then, the obtained fuzzy mathematical programming problem is transformed into two equivalent crisp linear programming problems. Finally, the transformed crisp linear programming problems are solved to obtain the shortest path and the corresponding shortest trapezoidal fuzzy distance between the source node and the destination node.
Yang et al. [
16] proposed mixed fuzzy reliable shortest path problems (shortest path problems in which the distance between two nodes is either represented by a triangular fuzzy number or a trapezoidal fuzzy number or any normal fuzzy number). Yang et al. [
16] also proposed an algorithm to solve mixed fuzzy reliable shortest path problems. Kumar et al. [
17] pointed out that Yang et al. [
16] have used a mathematically incorrect assumption in their proposed algorithm. Hence, it is inappropriate to use Yang et al.’s algorithm [
16].
Enayattabar et al. [
18] claimed that until now no one has used an interval-valued Pythagorean fuzzy number to represent unknown parameters for the shortest path problems. To fill this gap, Enayattabar et al. [
18] proposed interval-valued Pythagorean fuzzy shortest path problems. Enayattabar et al. [
18] also extended the existing crisp Dijkstra’s algorithm [
19] to interval-valued Pythagorean fuzzy Dijkstra’s algorithm to solve interval-valued Pythagorean fuzzy shortest path problems.
Enayattabar et al. [
20] proposed interval-valued trapezoidal fuzzy all-pairs shortest path problems in which the distance between two nodes is represented by an interval-valued trapezoidal fuzzy number. Enayattabar et al. [
20] also extended the existing crisp Floyd-Warshall algorithm [
19] to interval-valued trapezoidal fuzzy Floyd-Warshall approach to finding the shortest interval-valued trapezoidal fuzzy distance between every two nodes.
Ebrahimnejad et al. [
21] proposed interval-valued triangular fuzzy shortest path problems in which the distance between two nodes is represented by an interval-valued triangular fuzzy number. Ebrahimnejad et al. [
21] also proposed a method to solve interval-valued triangular fuzzy shortest path problems. In Ebrahimnejad et al.’s method [
21], firstly, an interval-valued triangular fuzzy linear programming problem is obtained corresponding to the considered interval-valued triangular fuzzy shortest path problem. Then, the obtained interval-valued triangular fuzzy linear programming problem is transformed into its equivalent crisp multi-objective linear programming problem. Finally, the transformed crisp multi-objective linear programming problem is solved using a lexicographic approach to obtain the shortest path and the corresponding shortest interval-valued triangular fuzzy distance.
Zedam et al. [
22] proposed T-spherical fuzzy shortest path problems (shortest path problems in which distance between two nodes is represented by a T-spherical fuzzy number). Zedam et al. [
22] also proposed a T-spherical fuzzy Dijkstra’s algorithm to solve T-spherical fuzzy shortest path problems.
Singh et al. [
23] proposed a method to solve fuzzy stochastic shortest path problems (shortest path problems in which the time required to travel from one node to another node under a specific traffic condition is represented by a trapezoidal fuzzy number and the occurrence of a specific traffic condition between two different nodes is represented by its probability).
Lin et al. [
24] proposed an efficient genetic algorithm to solve trapezoidal fuzzy shortest path problems (shortest path problems in which the traveling cost between every two nodes is represented by a trapezoidal fuzzy number).
Bagheri et al. [
25] claimed that till now no one has used a fuzzy DEA approach to solve fuzzy multi-objective shortest path problems. To fill this gap, Bagheri et al. [
25] proposed a fuzzy DEA-based approach to solve fuzzy multi-objective shortest path problems.
To the best of the authors’ knowledge, there is no other algorithm except Enayattabar et al.’s algorithm [
18] to solve the interval-valued Pythagorean fuzzy shortest path problems. However, in [
18], we noted the following discrepancies:
- (i)
Enayattabar et al.’s algorithm [
18] requires excessive computational efforts because of arithmetic operation calculations of interval-valued Pythagorean fuzzy numbers in each and every step;
- (ii)
In Enayattabar et al.’s algorithm [
18] more than one interval-valued Pythagorean fuzzy number represents the shortest distance between the source node and the destination node, which is mathematically incorrect.
To resolve these discrepancies, in this paper, a new approach (named as Mehar approach) is proposed to solve the interval-valued Pythagorean fuzzy shortest path problems. The proposed Mehar approach has the following advantages over Enayattabar et al.’s algorithm [
18]:
- (i)
In the proposed Mehar approach, the arithmetic operations of interval-valued Pythagorean fuzzy numbers require only to find the shortest interval-valued Pythagorean fuzzy distance. Hence, less computational efforts are required to apply the proposed Mehar approach as compared to Enayattabar et al.’s algorithm [
18];
- (ii)
The proposed Mehar approach has the ability to find a unique interval-valued Pythagorean fuzzy number that can represent the shortest distance between two nodes.
This paper is organized as follows: In
Section 3, some basic definitions are reviewed. In
Section 4, a lexicographic method for comparing interval-valued Pythagorean fuzzy numbers is proposed. In
Section 5, a new approach (named as Mehar approach) is proposed to solve interval-valued Pythagorean fuzzy shortest path problems. In
Section 6, a numerical example is solved to illustrate the proposed Mehar approach. In
Section 7, the superiority of the proposed lexicographic comparing method over Enayattabar et al.’s comparing method [
18] is discussed. In
Section 8, the superiority of the proposed Mehar approach over Enayattabar et al.’s algorithm [
18] is discussed. In
Section 9, the reason for the non-convergence of Enayattabar et al.’s algorithm [
18] is discussed. In
Section 10, the convergence of the proposed Mehar approach is discussed. In
Section 11, the novelty of the proposed Mehar approach is discussed.
Section 12 concludes the paper.
3. Preliminaries
In this section, some basic definitions are reviewed.
Definition 1 (see [
26])
. Let be a universal set. Then, the set is said to be a fuzzy set defined over the universal set , where is said to be the membership function and the value is called the degree of membership for belongs to the set .
Definition 2 (see [
26])
. Let be a fuzzy set defined over the universal set and Then, the crisp set is said to be the -cut of the fuzzy set .
Definition 3 (see [
26])
. Let be a fuzzy set defined over the universal set . Then, the crisp set is said to be the support of the fuzzy set .
Definition 4 (see [
26])
. Let be a fuzzy set defined over the universal set . Then, the crisp number is said to be the height of the fuzzy set . If , then the fuzzy set is said to be a normal fuzzy set. Definition 5 (see [
26])
. A fuzzy set defined over the set of real numbers is said to be a fuzzy number if it satisfies the following conditions:- (i)
is normal;
- (ii)
is a closed interval for every;
- (iii)
The support ofis bounded.
Definition 6 (see [
18])
. Let be a universal set. Then, the set is said to be an intuitionistic fuzzy set defined over the universal set , where is said to be the membership function and is said to be the non-membership function. The values and are called the degree of membership and the degree of non-membership for , respectively. Also, the values and satisfy the condition for each Definition 7 (see [
18])
. Let be a universal set. Then, the set is said to be a Pythagorean fuzzy set defined over the universal set , where
is said to be the membership function and is said to be the non-membership function. The values and are called the degree of membership and the degree of non-membership for respectively. Also, the values and satisfy the condition for each Definition 8 (see [
18])
. A fuzzy number is said to be an interval-valued Pythagorean fuzzy number if and for each , Definition 9 (see [
18])
. Let and be two interval-valued Pythagorean fuzzy numbers. Then, The definitions used in this section are used for analysis performed in subsequent sections in the paper.
4. Proposed Lexicographic Method for Comparing Interval-Valued Pythagorean Fuzzy Numbers
In the next section, a new approach (named as Mehar approach) is proposed to solve interval-valued Pythagorean fuzzy shortest path problems. Since, to propose Mehar approach, there is a need to use a method for comparing interval-valued Pythagorean fuzzy numbers. Therefore, in this section, a lexicographic method for comparing interval-valued Pythagorean fuzzy numbers is proposed.
Let and be two interval-valued Pythagorean fuzzy numbers. Then, using the proposed lexicographic method, the interval-valued Pythagorean fuzzy numbers and can be compared as follows.
- Step 1:
Check whether or or .
- Case (a)
If then
- Case (b)
If then
- Case (c)
If then go to Step 2.
- Step 2:
Check whether or or
- Case (a)
If then
- Case (b)
If then
- Case (c)
If then go to Step 3.
- Step 3:
Check whether or or .
- Case (a)
If then
- Case (b)
If then
- Case (c)
If then go to Step 4.
- Step 4:
Check whether or or .
- Case (a)
If then
- Case (b)
If then
- Case (c)
If then .
The interval-valued comparison for Pythagorean fuzzy numbers developed in this section is used for developing a solution method for fuzzy shortest path problems.
5. Proposed Mehar Approach for Solving Interval-Valued Pythagorean Fuzzy Shortest Path Problems
In this section, a new approach (named as Mehar approach) is proposed to solve interval-valued Pythagorean fuzzy shortest path problems.
Using the proposed Mehar approach, the shortest path and the corresponding shortest interval-valued Pythagorean fuzzy distance between the source node and the destination node can be obtained as follows.
- Step 1:
Using the comparing method discussed in
Section 4, transform the considered interval-valued Pythagorean fuzzy shortest path problem into its equivalent crisp shortest path problem, i.e., transform each interval-valued Pythagorean fuzzy distance
into its equivalent crisp distance
.
- Step 2:
Apply Dijkstra’s algorithm [
19] to find the shortest path of the transformed crisp shortest path problem and check whether a unique optimal path exists for the transformed crisp shortest path problem or alternative optimal paths exist for the transformed crisp shortest path problem.
- Case 1:
If a unique optimal path exists, then, the total interval-valued Pythagorean fuzzy distance corresponding to the obtained unique optimal path represents the shortest interval-valued Pythagorean fuzzy distance between the source node and the destination node.
- Case 2:
If alternative optimal paths exist, then, find all the interval-valued Pythagorean fuzzy numbers, representing the total interval-valued Pythagorean fuzzy distance between the source node and the destination node, corresponding to all the obtained alternative optimal paths. Finally, use the comparing method, discussed in
Section 4, to find the smallest interval-valued Pythagorean fuzzy number out of all the obtained interval-valued Pythagorean fuzzy numbers. The obtained smallest interval-valued Pythagorean fuzzy number represents the shortest interval-valued Pythagorean fuzzy distance between the source node and the destination node, as well as the corresponding path/paths which represent the shortest path between the source node and the destination node.
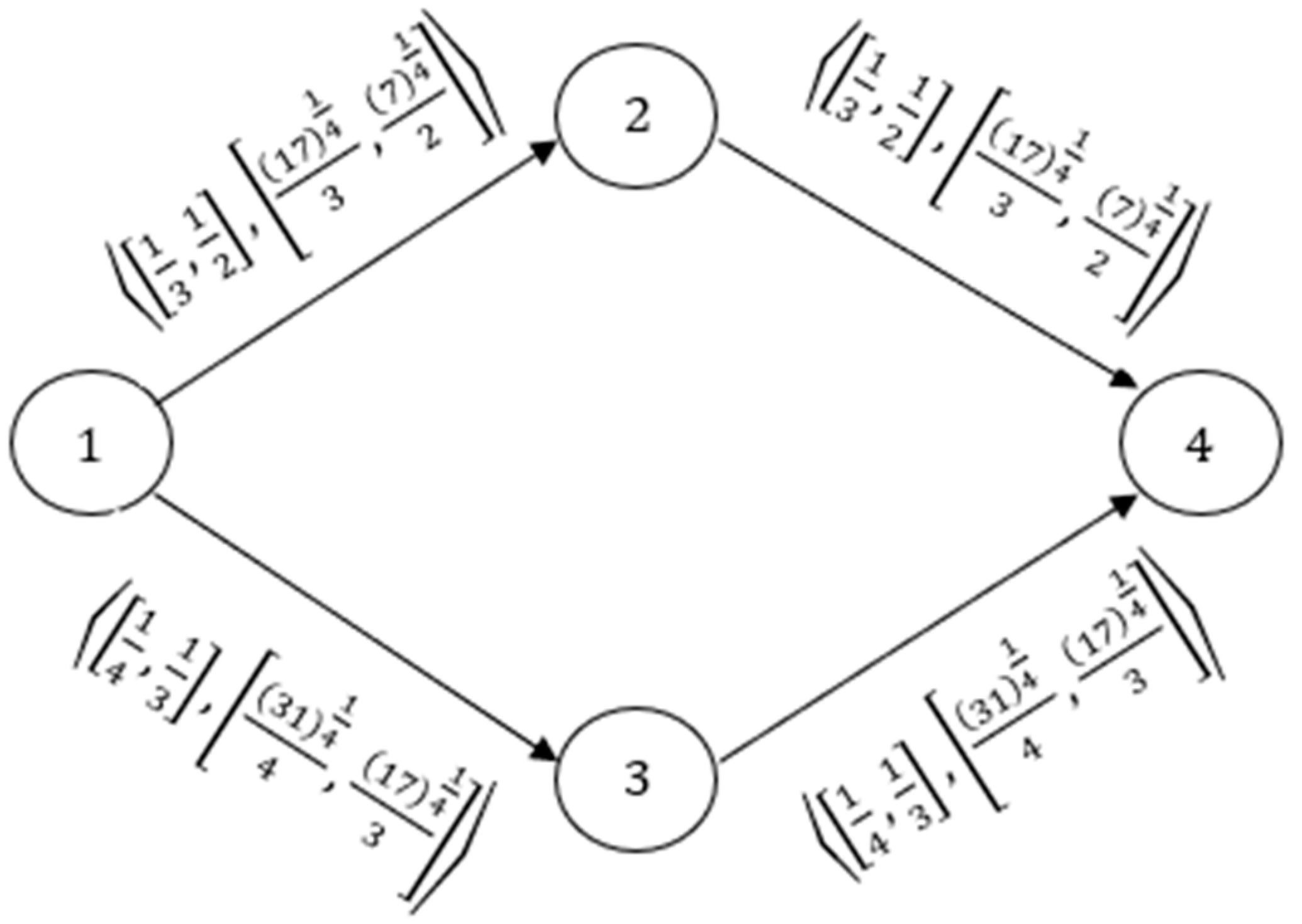
6. Illustrative Example
In this section, the interval-valued Pythagorean fuzzy shortest path problem, represented by
Figure 1, is solved to illustrate the proposed Mehar approach.
Using the proposed Mehar approach, the shortest path and the corresponding shortest interval-valued Pythagorean fuzzy distance between the source node (1) and the destination node (4) can be obtained as follows.
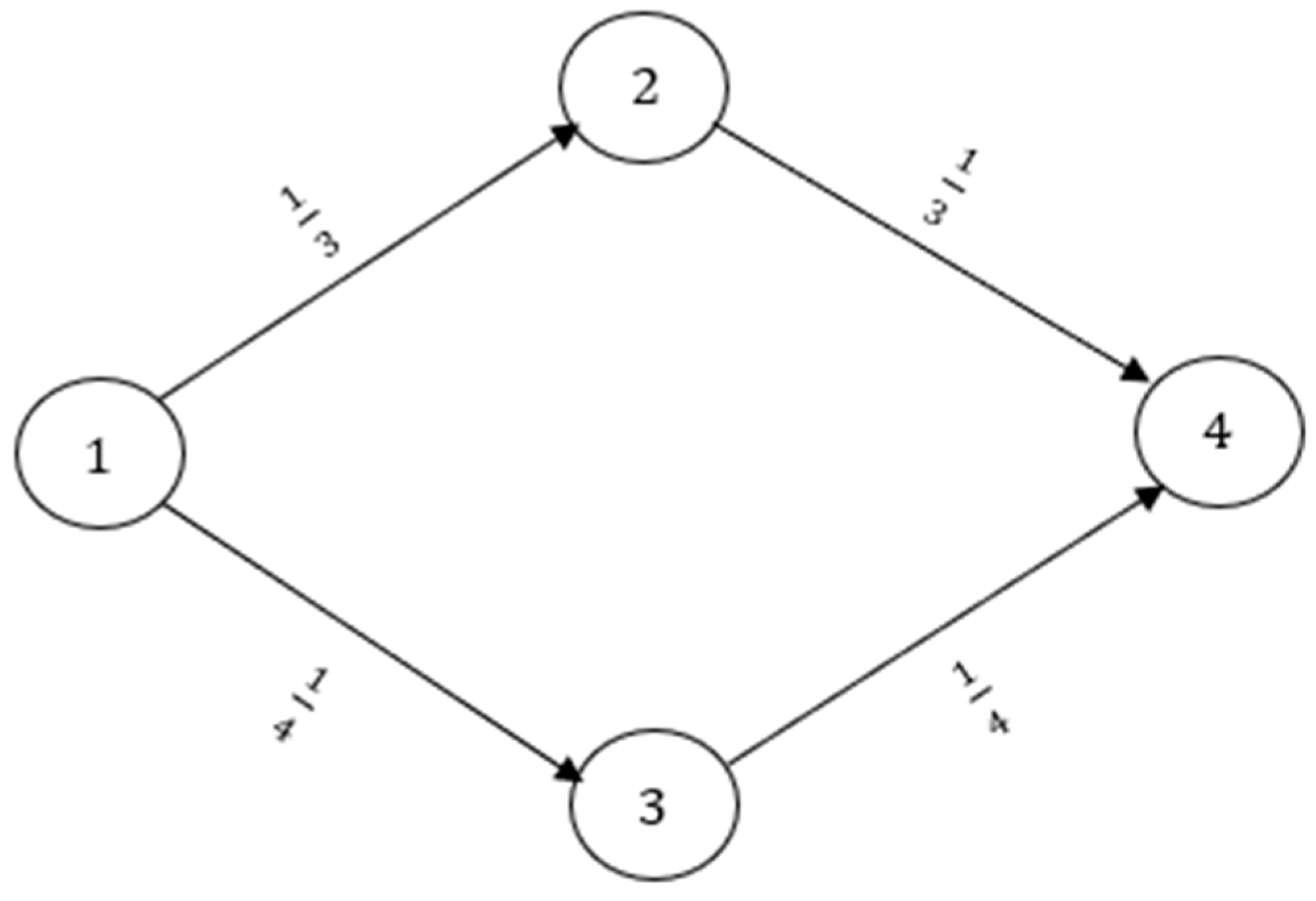
- Step 1:
Using Step 1 of the proposed Mehar approach, the interval-valued Pythagorean fuzzy shortest path problem, represented by
Figure 1, can be transformed into its equivalent crisp shortest path problem, represented by
Figure 2.
- Step 2:
According to Step 2 of the proposed Mehar approach, there is a need to apply Dijkstra’s algorithm [
19] to find the shortest path between the source node (1) and the destination node (4) of the transformed crisp shortest path problem, represented by
Figure 2.
It can be easily verified that on applying Dijkstra’s algorithm [
19] for the transformed crisp shortest path problem, represented by
Figure 2, a unique shortest path
is obtained.
Since, the obtained shortest path is unique, so, according to Step 2 of the proposed Mehar approach, the total interval-valued Pythagorean fuzzy distance, i.e., corresponding to the path represents the shortest interval-valued Pythagorean fuzzy distance between the source node (1) and the destination node (4) and the path represents the shortest path between the source node (1) and the destination node (4).
7. Superiority of the Proposed Lexicographic Comparing Method over Enayattabar et al.’s Comparing Method
In this section, the superiority of the proposed lexicographic method for comparing interval-valued Pythagorean fuzzy numbers over the method used by Enayattabar et al. [
18] for comparing interval-valued Pythagorean fuzzy numbers, is discussed.
Enayattabar et al. [
18] (p. 95) have used the following method for comparing interval-valued Pythagorean fuzzy numbers
and
.
- (i)
- (ii)
- (iii)
.
where,
and .
However, the following example indicates that this method fails to distinguish two distinct interval-valued Pythagorean fuzzy numbers:
Let and be two interval-valued Pythagorean fuzzy numbers.
It is obvious that
and
are distinct interval-valued Pythagorean fuzzy numbers, i.e.,
. While,
Therefore, according to the method used by Enayattabar et al. [
18] for comparing interval-valued Pythagorean fuzzy numbers,
.
However, as
. Therefore, according to the lexicographic method for comparing interval-valued Pythagorean fuzzy numbers, proposed in
Section 4,
.
It can be easily verified that Case (c) of Step 4 of the lexicographic method for comparing interval-valued Pythagorean fuzzy numbers, proposed in
Section 4, will be satisfied only if the considered interval-valued Pythagorean fuzzy number will be the same. Hence, the proposed lexicographic method for comparing interval-valued Pythagorean fuzzy numbers will never fail to distinguish two distinct interval-valued Pythagorean fuzzy numbers.
8. Superiority of the Proposed Mehar Approach over Enayattabar et al.’s Algorithm
Enayattabar et al. [
18] extended the existing crisp Dijkstra algorithm [
19] to the interval-valued Pythagorean fuzzy Dijkstra algorithm by considering the following modifications:
- (i)
Use the addition of two interval-valued Pythagorean fuzzy numbers, discussed in Definition 9, instead of the addition of two positive real numbers;
- (ii)
Use the method, discussed in
Section 7, to compare two interval-valued Pythagorean fuzzy distances.
If
represents the set of nodes,
represents the set of arcs
which directly connects the node
to the node
of a network and
represents the interval-valued Pythagorean fuzzy cost associated with the arc
Then, using Enayattabar et al.’s algorithm [
18], the shortest interval-valued Pythagorean fuzzy distance between the source node and the destination node of the considered network can be calculated as follows.
- Step 1:
Set , and
- Step 2:
Find .
- Step 3:
Calculate the values of and .
- Step 4:
Find and .
- Step 5:
Find .
- Step 6:
Let the minimum be Then, and .
- Step 7:
Check whether or .
- Case (a):
If , then , represents the shortest interval-valued Pythagorean fuzzy distance between the source node and the destination node.
- Case (b):
If , then go to Step 2 with the updated obtained in Step 6.
It is obvious that to apply Enayattabar et al.’s algorithm [
18] there is a need to use the arithmetic operations of interval-valued Pythagorean fuzzy numbers in each step. While to apply the proposed Mehar approach, there is a need to use the arithmetic operations of interval-valued Pythagorean fuzzy numbers only to find the shortest interval-valued Pythagorean fuzzy distance. Hence, many computational efforts are required to apply Enayattabar et al.’s algorithm [
18] as compared to the proposed Mehar approach.
Furthermore, it is obvious from
Section 6 that on applying the proposed Mehar approach for the interval-valued Pythagorean fuzzy shortest path problem, represented by
Figure 1, a unique interval-valued Pythagorean fuzzy number, representing the shortest distance between the source node (1) and the destination node (4), is obtained.
The following indicates that on solving the interval-valued Pythagorean fuzzy shortest path problem, represented by
Figure 1, by Enayattabar et al.’s algorithm [
18], two different interval-valued Pythagorean fuzzy numbers, representing the shortest distance between the source node (1) and the destination node (4), are obtained, which is mathematically incorrect.
Using Enayattabar et al.’s algorithm [
18], the interval-valued Pythagorean fuzzy distance between the source node (1) and the destination node (4) can be obtained as follows.
Iteration 1
- Step 1:
According to Step 1 of Enayattabar et al.’s algorithm [
18],
,
and
- Step 2:
According to Step 2 of Enayattabar et al.’s algorithm [
18],
.
- Step 3:
According to Step 3 of Enayattabar et al.’s algorithm [
18],
- Step 4:
According to Step 4 of Enayattabar et al.’s algorithm [
18],
- Step 5:
According to Step 5 of Enayattabar et al.’s algorithm [
18],
- Step 6:
Since the minimum value is
. So, according to Step 6 of Enayattabar et al.’s algorithm [
18],
and
.
- Step 7:
Since
. So, according to Step 7 of Enayattabar et al.’s algorithm [
18], there is a need to repeat Step 2–Step 6 with updated
obtained in Step 6.
Iteration 2
- Step 2:
According to Step 2 of Enayattabar et al.’s algorithm [
18],
.
- Step 3:
According to Step 3 of Enayattabar et al.’s algorithm [
18],
- Step 4:
According to Step 4 of Enayattabar et al.’s algorithm [
18],
- Step 5:
According to Step 5 of Enayattabar et al.’s algorithm [
18],
- Step 6:
Since the minimum value is
. So, according to Step 6 of Enayattabar et al.’s algorithm [
18],
and
.
- Step 7:
Since
. So, according to Step 7 of Enayattabar et al.’s algorithm [
18], there is a need to repeat Step 2–Step 6 with updated
obtained in Step 6.
Iteration 3
- Step 2:
According to Step 2 of Enayattabar et al.’s algorithm [
18],
.
- Step 3:
According to Step 3 of Enayattabar et al.’s algorithm [
18],
- Step 4:
According to Step 4 of Enayattabar et al.’s algorithm [
18],
- Step 5:
According to Step 5 of Enayattabar et al.’s algorithm [
18],
- Step 6:
Since the minimum value of
. According to Step 6 of Enayattabar et al.’s algorithm [
18],
and
as well as
and
.
- Step 7:
Since
. According to Step 7 of Enayattabar et al.’s algorithm [
18], both the interval-valued Pythagorean fuzzy numbers
and
represents the shortest interval-valued Pythagorean fuzzy distance between the source node (1) and the destination node (4).
9. Reason for the Non-Convergence of Enayattabar et al.’s Algorithm
It is a well-known fact that the existing crisp Dijkstra’s algorithm [
19] always converges to a unique shortest distance. Also, it is obvious from
Section 8 that there are only the following differences between Enayattabar et al.’s interval-valued Pythagorean fuzzy Dijkstra algorithm [
18] and the existing crisp Dijkstra algorithm [
19].
- (i)
In Enayattabar et al.’s interval-valued Pythagorean fuzzy Dijkstra algorithm [
18], there is a need to find addition of interval-valued Pythagorean fuzzy numbers. While, in the existing crisp Dijkstra’s algorithm [
19], there is a need to find addition of positive real numbers.
- (ii)
In Enayattabar et al.’s interval-valued Pythagorean fuzzy Dijkstra algorithm [
18], there is a need to compare interval-valued Pythagorean fuzzy numbers. While, in the existing crisp Dijkstra’s algorithm [
19], there is a need to compare positive real numbers.
Hence, Enayattabar et al.’s interval-valued Pythagorean fuzzy Dijkstra algorithm [
18] will also converge to a unique shortest interval-valued Pythagorean fuzzy distance if the following conditions which are satisfied for positive real numbers will also be satisfied for interval-valued Pythagorean fuzzy numbers:
- (i)
The sum of two positive real numbers will also be a positive real number;
- (ii)
If and are two positive real numbers such that . Then, minimum will be either or , i.e., minimum cannot be both and .
It can be easily verified that the condition (i) is satisfying for interval-valued Pythagorean fuzzy numbers, i.e., sum of two interval-valued Pythagorean fuzzy numbers will always be an interval-valued Pythagorean fuzzy number. However, the following example clearly indicates that the condition (ii) is not satisfying for interval-valued Pythagorean fuzzy numbers, i.e., if and are two interval-valued Pythagorean fuzzy numbers such that . Then, minimum can be both and .
Let
and
are distinct interval-valued Pythagorean fuzzy numbers, i.e.,
. Then, according to the existing method for comparing interval-valued Pythagorean fuzzy numbers, discussed in
Section 7, to find minimum
is equivalent to find minimum
. However, as
. Therefore, according to the existing method for comparing interval-valued Pythagorean fuzzy numbers, discussed in
Section 7, both interval-valued Pythagorean fuzzy numbers
and
represent the minimum
, which is mathematically incorrect.
10. Convergence of the Proposed Mehar Approach
It is obvious from
Section 9 that the following condition should be satisfied for the convergence of the proposed Mehar approach:
“If and are two interval-valued Pythagorean fuzzy numbers such that . Then, minimum cannot be both and ”.
It is pertinent to mention that as in the proposed Mehar approach the lexicographic method, proposed in
Section 4, is used for comparing interval-valued Pythagorean fuzzy numbers. Therefore, to prove the convergence of the proposed Mehar approach, there is a need to prove that minimum
cannot be both
and
. Hence, the same is proved here:
Let and be two interval-valued Pythagorean fuzzy numbers such that ;
Since, so at least one of the equalities and will not be satisifed.
- Case 1:
Let the equality be not satisfying, i.e., . Then, either or .
- Case 1a:
If , then according to the proposed lexicographic method for comparing interval-valued Pythagorean fuzzy numbers, . Hence, minimum .
- Case 1b:
If , then according to the proposed lexicographic method for comparing interval-valued Pythagorean fuzzy numbers, . Hence, minimum .
- Case 2:
Let the equality be satisfying, i.e., but the equality is not satisfying, i.e., . Then, either or .
- Case 2a:
If , then according to the proposed lexicographic method for comparing interval-valued Pythagorean fuzzy numbers, . Hence, minimum .
- Case 2b:
If , then according to the proposed lexicographic method for comparing interval-valued Pythagorean fuzzy numbers, . Hence, minimum .
- Case 3:
Let the equalities and be satisfying, i.e., and but the equality is not satisfying, i.e., . Then, either or .
- Case 3a:
If , then according to the proposed lexicographic method for comparing interval-valued Pythagorean fuzzy numbers, . Hence, minimum .
- Case 3b:
If , then according to the proposed lexicographic method for comparing interval-valued Pythagorean fuzzy numbers, . Hence, minimum .
- Case 4:
Let the equalities and be satisfying, i.e., and but the equality is not satisfying, i.e., . Then, either or .
- Case 4a:
If , then according to the proposed lexicographic method for comparing interval-valued Pythagorean fuzzy numbers, . Hence, minimum .
- Case 4b:
If , then according to the proposed lexicographic method for comparing interval-valued Pythagorean fuzzy numbers, . Hence, minimum .
11. Novelty of the Proposed Mehar Approach
It is pertinent to mention that if in Enayattabar et al.’s algorithm [
18], the proposed lexicographic method for comparing interval-valued Pythagorean fuzzy numbers, discussed in
Section 4, will be used instead of the existing method for comparing interval-valued Pythagorean fuzzy numbers, discussed in
Section 7. Then, Enayattabar et al.’s algorithm [
18] will converge to a unique shortest interval-valued Pythagorean fuzzy distance. However, in such a case, one needs to use the arithmetic operations of interval-valued Pythagorean fuzzy numbers. Hence, in such a case, many computational efforts are required. The proposed Mehar approach can handle both the issues simultaneously, i.e., less computational efforts are required for applying the proposed Mehar approach as the proposed Mehar approach always converges to a unique shortest interval-valued Pythagorean fuzzy distance.
The proposed Mehar approach to shortest path problems offers benefits on all three dimensions of the triple bottom line (people, planet and profit) approach for sustainability. Effective use of the shortest path algorithms results in cost saving to all the stakeholders within the supply chain (benefit to the first bottom-line, people, of sustainability). Less distance traveled will result in less carbon emissions to save the environment (benefit of the second bottom-line, planet, of sustainability). The effective use of the algorithm directly impacts the supply chain and the end customer economically (benefit of the third bottom-line, profit, of sustainability).
12. Conclusions
The supply chain network is a complex network of suppliers, manufacturers, retailers and customers. Sustainable development requires the minimization of waste caused by different operations of the supply chain network. The sustainable design of the supply chain network often requires finding an optimal path between two nodes of the supply chain network. Finding the lowest cost between two nodes arises in many components of the supply chain network, such as transportation design, inventory design, process design etc. By efficiently solving the shortest path problem, supply chain costs can be substantially reduced to bring sustainability in to supply chain network design. This paper makes an attempt to find the shortest path between two nodes using fuzzy cost on an arc. On the basis of present study, it can be easily concluded that it is better to use the proposed lexicographic method for comparing interval-valued Pythagorean fuzzy numbers, and the proposed Mehar approach for solving interval-valued Pythagorean fuzzy shortest path problems, as compared to Enayattabar et al.’s method [
18] for comparing interval-valued Pythagorean fuzzy numbers and Enayattabar et al.’s algorithm [
18] for solving interval-valued Pythagorean fuzzy shortest path problems, respectively. The present study will be a step towards achieving a sustainable supply chain network. The research findings in this paper are useful for many supply chain problems while obtaining optimal paths using the fuzzy sets.
It is pertinent to mention that the proposed Mehar approach finds the shortest distance from the source node to the destination node. In the deterministic version of shortest route problem, the well-known Dijkstra’s algorithm has the ability to find the shortest distance from the source node to all other nodes while finding the shortest distance from the source node to the destination node. In future research, the proposed Mehar approach can be extended to find the shortest route from the source node to all other nodes in the network. Furthermore, it may be tried to collect the data of some real-life shortest path problems and then, the considered real-life shortest path problems can be solved by the proposed Mehar approach.


 ,
, 
{kind=link}
{kind=link}

