
A Spatiotemporal Study and Location-Specific Trip Pattern Categorization of Shared E-Scooter Usage



Abstract
:1. Introduction
2. Literature Review
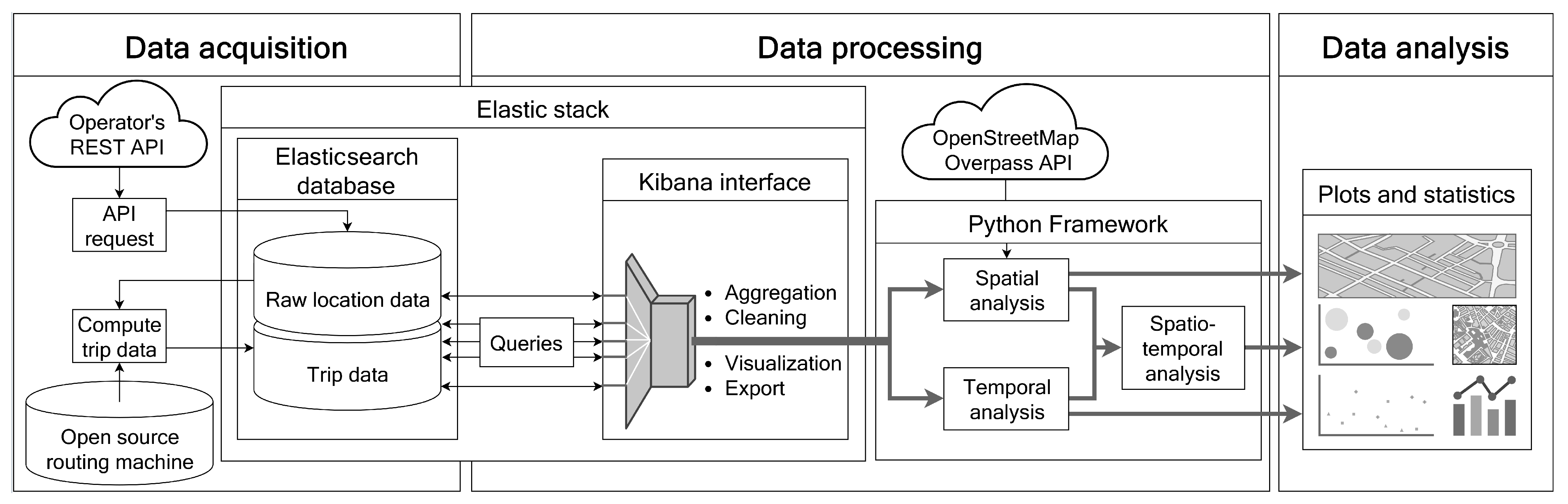
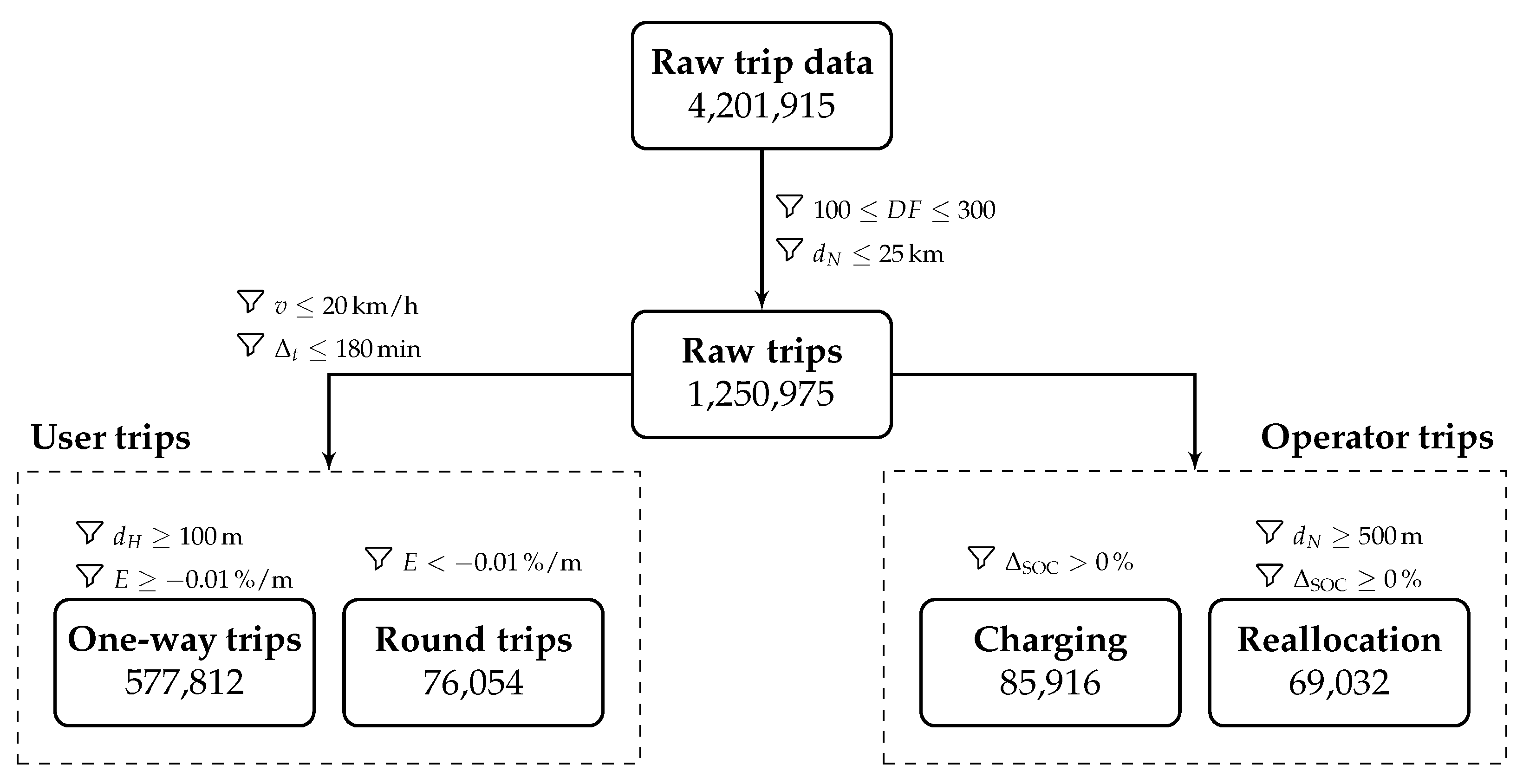
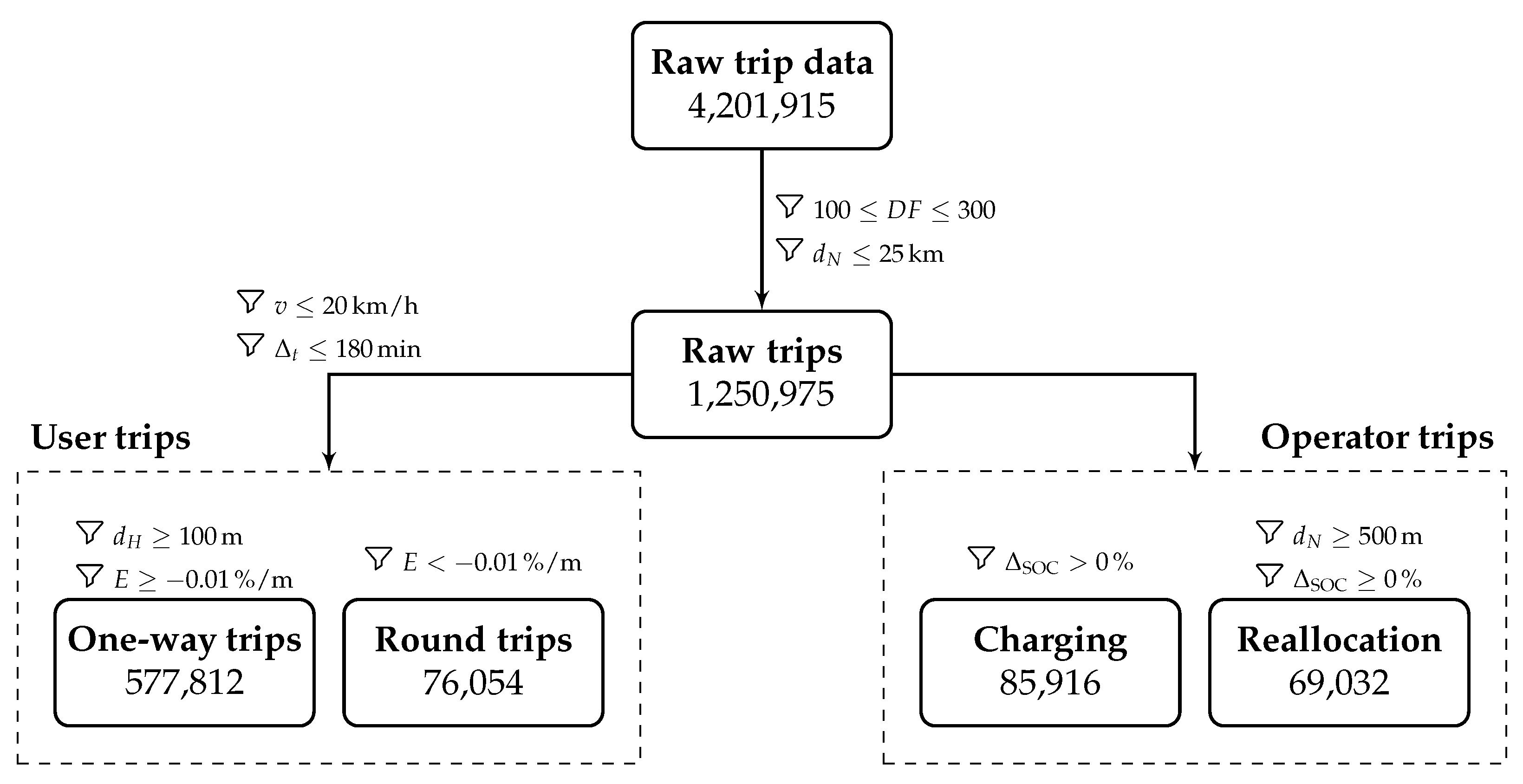
3. Data Set and Data Cleaning
4. Spatiotemporal E-Scooter Usage Patterns in Berlin
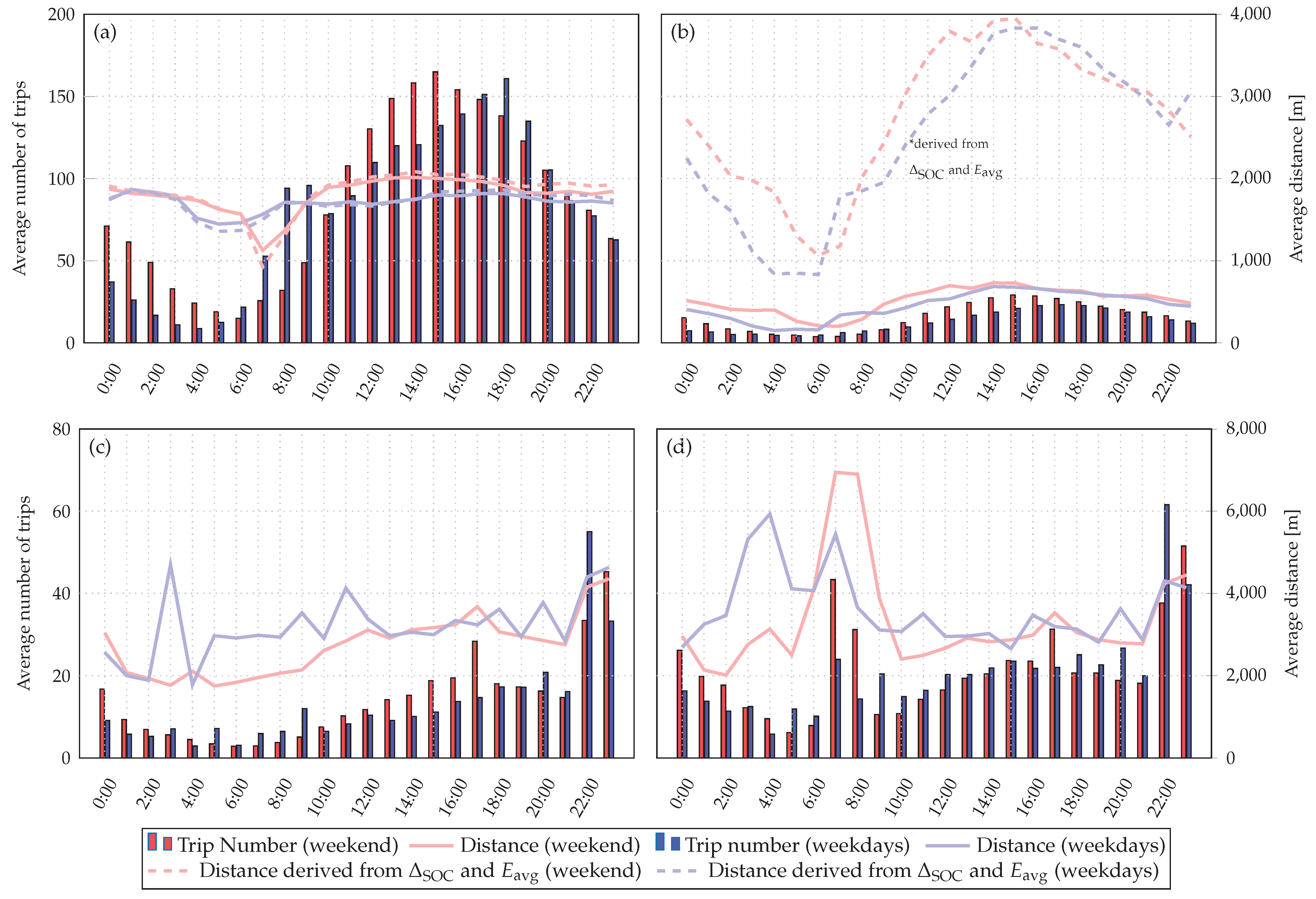
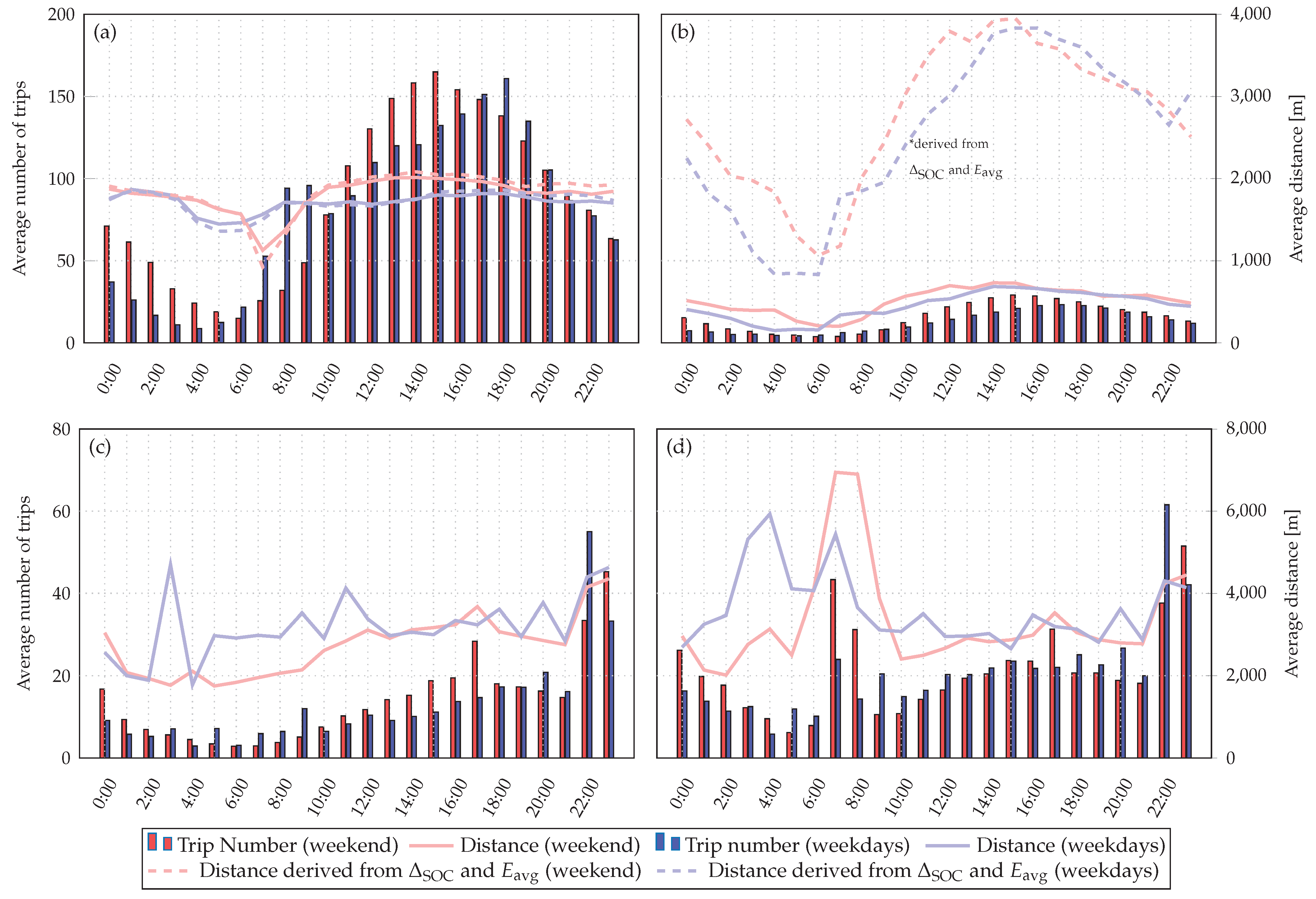
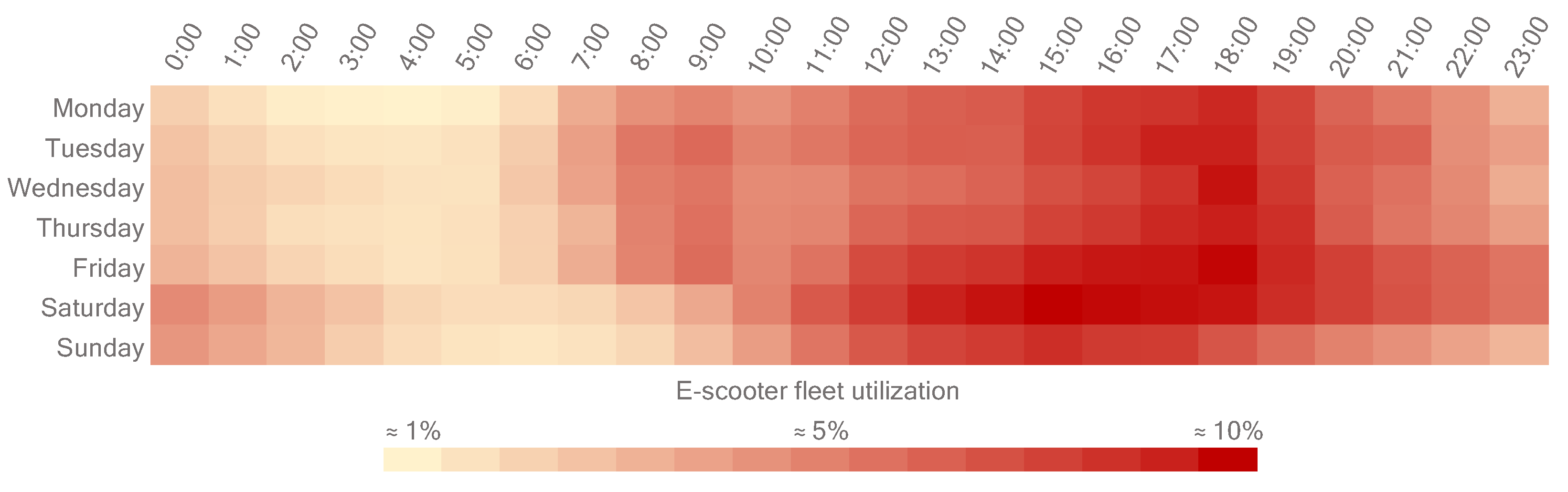
4.1. Temporal Analyses
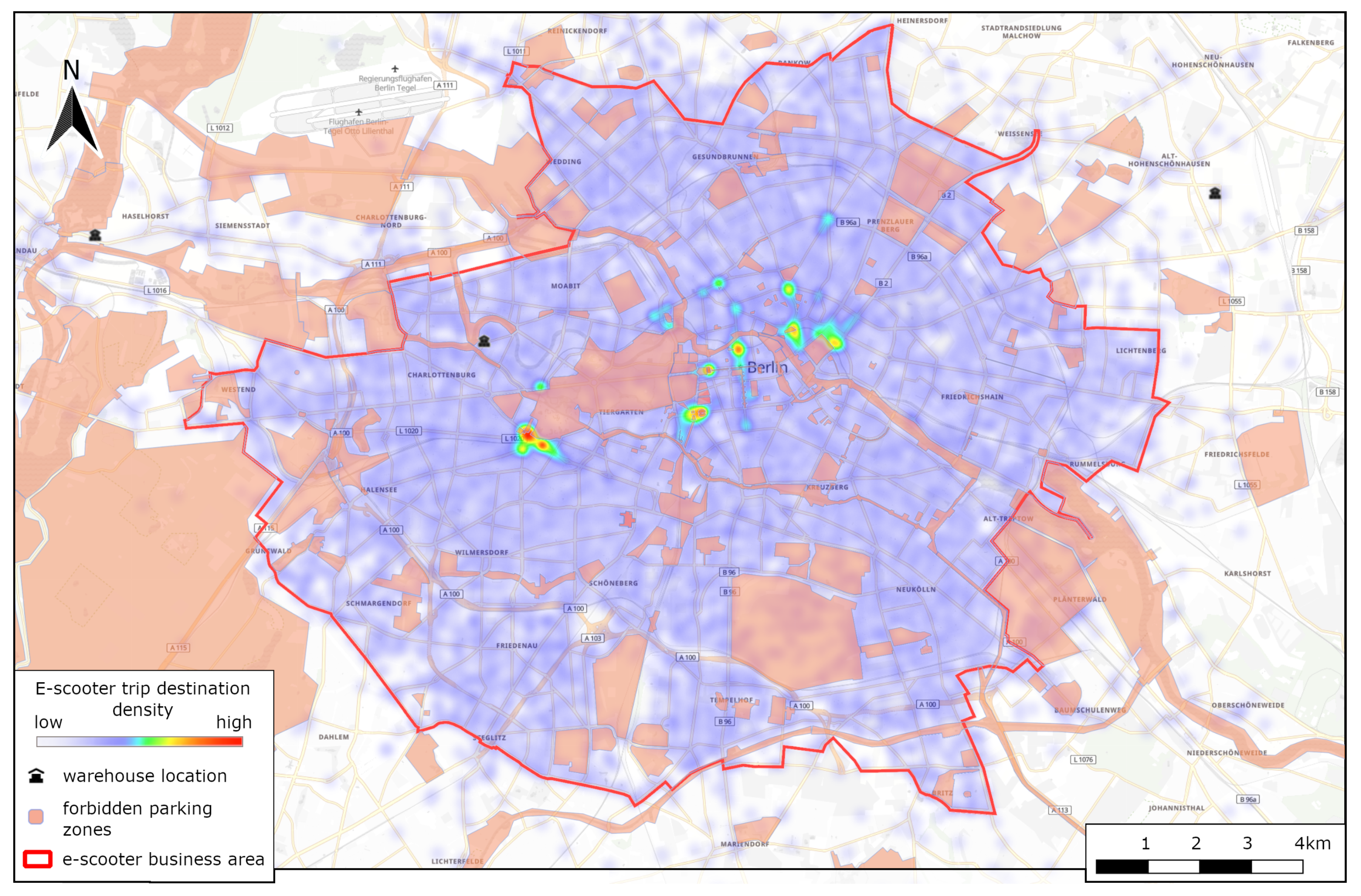
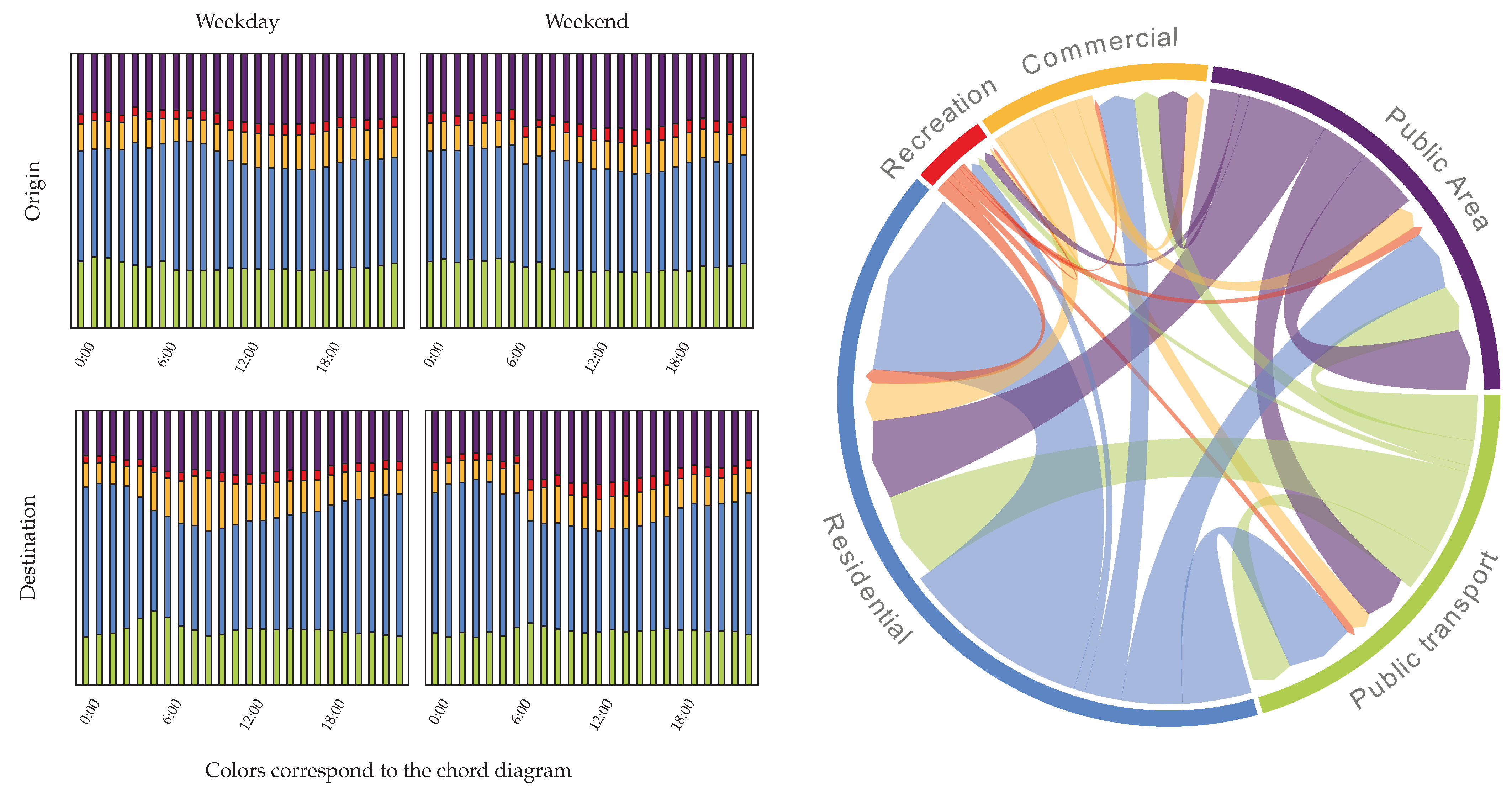
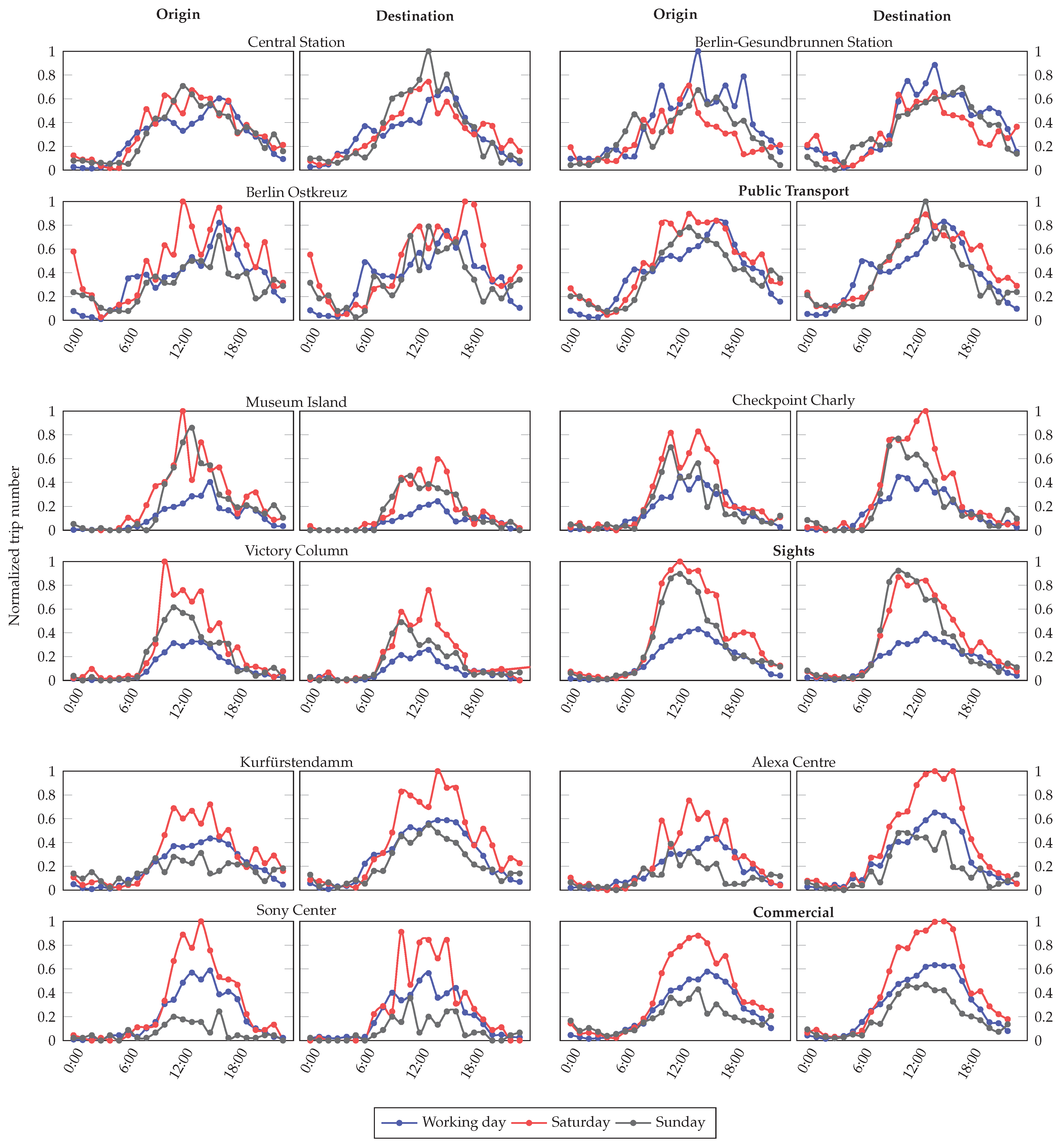
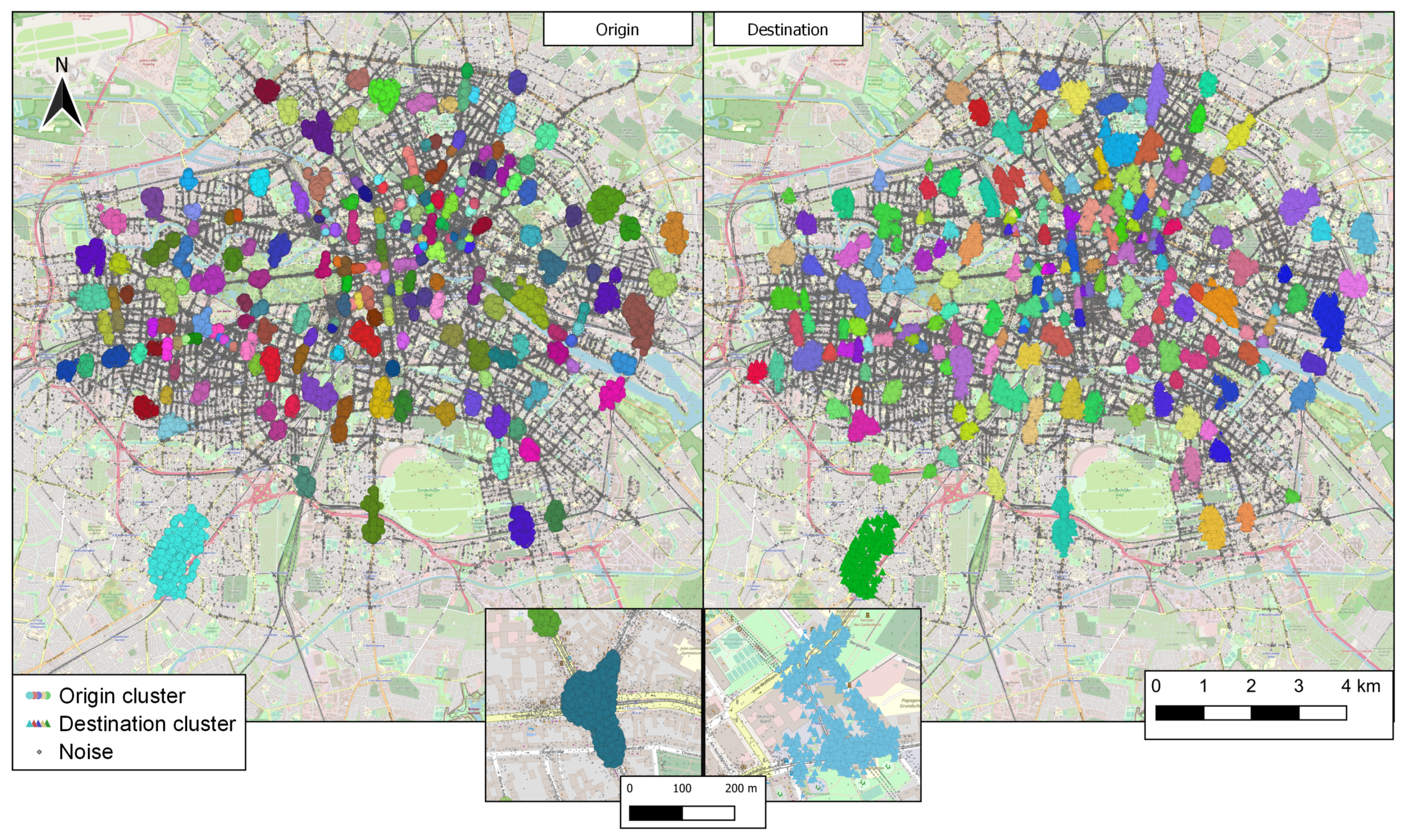
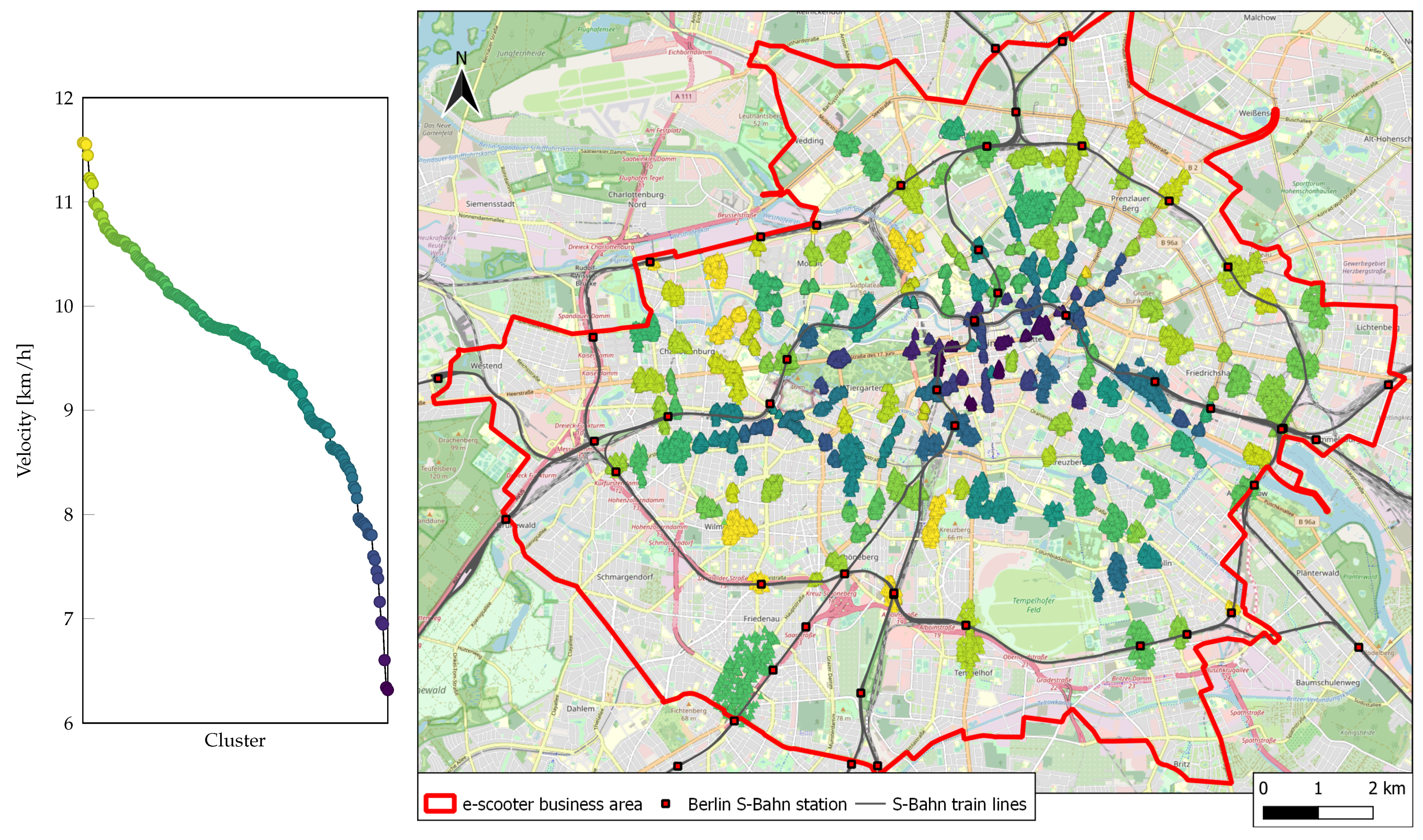
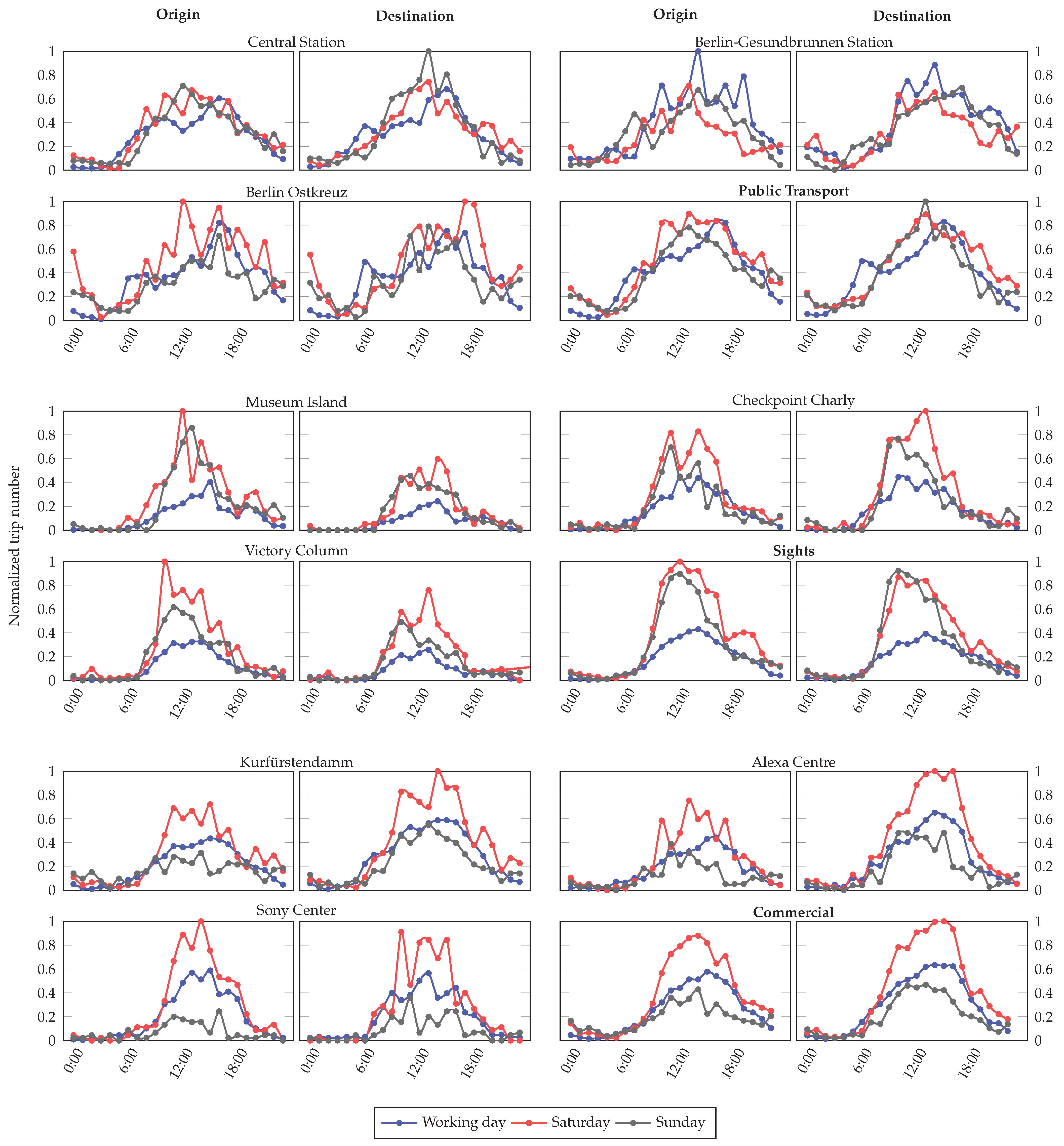
4.2. Spatiotemporal Analyses
5. Limitations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lazarus, J.; Pourquier, J.C.; Feng, F.; Hammel, H.; Shaheen, S. Micromobility evolution and expansion: Understanding how docked and dockless bikesharing models complement and compete—A case study of San Francisco. J. Transp. Geogr. 2020, 84, 102620. [Google Scholar] [CrossRef]
- National Association of City Transportation Officials. Shared Micromobility in the U.S.: 2019. 2020. Available online: https://nacto.org/wp-content/uploads/2020/08/2020bikesharesnapshot.pdf (accessed on 14 September 2021).
- Schellong, D.; Sadek, P.; Schaetzberger, C.; Barrack, T. The Promise and Pitfalls of E-Scooter Sharing; Boston Consulting Group Publications: Europe, 2019; Available online: https://image-src.bcg.com/Images/BCG-The-Promise-and-Pitfalls-of-E-Scooter%20Sharing-May-2019_tcm96-220107.pdf (accessed on 14 September 2021).
- Bai, S.; Jiao, J. Dockless E-scooter usage patterns and urban built Environments: A comparison study of Austin, TX, and Minneapolis, MN. Travel Behav. Soc. 2020, 20, 264–272. [Google Scholar] [CrossRef]
- Mobility Foresights Transportation. Electric Scooter Sharing Market in US and Europe 2019–2025. 2020. Available online: https://mobilityforesights.com/product/global-micromobility-market/ (accessed on 14 September 2021).
- Jiao, J.; Bai, S. Understanding the Shared E-scooter Travels in Austin, TX. Int. J. Geo-Inf. 2020, 9, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Noack, R. Electric scooters have arrived in Europe and a lot of people there hate them too. The Washington Post, 9 July 2019. [Google Scholar]
- McKenzie, G. Urban mobility in the sharing economy: A spatiotemporal comparison of shared mobility services. Comput. Environ. Urban Syst. 2020, 79, 101418. [Google Scholar] [CrossRef]
- Zou, Z.; Younes, H.; Erdoğan, S.; Wu, J. Exploratory Analysis of Real-Time E-Scooter Trip Data in Washington, D.C. Transp. Res. Rec. J. Transp. Res. Board 2020, 2674, 285–299. [Google Scholar] [CrossRef]
- Boglietti, S.; Barabino, B.; Maternini, G. Survey on e-Powered Micro Personal Mobility Vehicles: Exploring Current Issues towards Future Developments. Sustainability 2021, 13, 3692. [Google Scholar] [CrossRef]
- O’Hern, S.; Estgfaeller, N. A Scientometric Review of Powered Micromobility. Sustainability 2020, 12, 9505. [Google Scholar] [CrossRef]
- Almannaa, M.H.; Ashqar, H.I.; Elhenawy, M.; Masoud, M.; Rakotonirainy, A.; Rakha, H. A comparative analysis of e-scooter and e-bike usage patterns: Findings from the City of Austin, TX. Int. J. Sustain. Transp. 2020. [Google Scholar] [CrossRef]
- Caspi, O.; Smart, M.J.; Noland, R.B. Spatial associations of dockless shared e-scooter usage. Transp. Res. Part D Transp. Environ. 2020, 86, 102396. [Google Scholar] [CrossRef]
- Feng, C.; Jiao, J.; Wang, H. Estimating E-Scooter Traffic Flow Using Big Data to Support Planning for Micromobility. J. Urban Technol. 2020. [Google Scholar] [CrossRef]
- McKenzie, G. Spatiotemporal comparative analysis of scooter-share and bike-share usage patterns in Washington, D.C. J. Transp. Geogr. 2019, 78, 19–28. [Google Scholar] [CrossRef]
- Younes, H.; Zou, Z.; Wu, J.; Baiocchi, G. Comparing the Temporal Determinants of Dockless Scooter-share and Station-based Bike-share in Washington, D.C. Transp. Res. Part A Policy Pract. 2020, 134, 308–320. [Google Scholar] [CrossRef]
- Noland, R.B. Trip Patterns and Revenue of Shared E-Scooters in Louisville, Kentucky. Findings 2019, 7747. [Google Scholar] [CrossRef]
- Mathew, J.K.; Liu, M.; Bullock, D.M. Impact of Weather on Shared Electric Scooter Utilization. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, NZ, USA, 27–30 October 2019; pp. 4512–4516. [Google Scholar] [CrossRef]
- Mathew, J.K.; Mingmin, L.; Seeder, S.; Howell, L.; Bullock, D.M. Analysis of E-Scooter Trips and Their Temporal Usage Patterns. ITE J. 2019, 89, 44–49. [Google Scholar]
- Zhu, R.; Zhang, X.; Kondor, D.; Santi, P.; Ratti, C. Understanding spatio-temporal heterogeneity of bike-sharing and scooter-sharing mobility. Comput. Environ. Urban Syst. 2020, 81, 101483. [Google Scholar] [CrossRef]
- Wong, D.W. The modifiable areal unit problem (MAUP). In WorldMinds: Geographical Perspectives on 100 Problems; Springer: Berlin/Heidelberg, Germany, 2004; pp. 571–575. [Google Scholar]
- Bai, S.; Jiao, J.; Chen, Y.; Guo, J. The relationship between E-scooter travels and daily leisure activities in Austin, Texas. Transp. Res. Part D Transp. Environ. 2021, 95, 102844. [Google Scholar] [CrossRef]
- Hosseinzadeh, A.; Algomaiah, M.; Kluger, R.; Li, Z. E-scooters and sustainability: Investigating the relationship between the density of E-scooter trips and characteristics of sustainable urban development. Sustain. Cities Soc. 2021, 66, 102624. [Google Scholar] [CrossRef]
- Hosseinzadeh, A.; Algomaiah, M.; Kluger, R.; Li, Z. Spatial analysis of shared e-scooter trips. J. Transp. Geogr. 2021, 92, 103016. [Google Scholar] [CrossRef]
- Huo, J.; Yang, H.; Li, C.; Zheng, R.; Yang, L.; Wen, Y. Influence of the built environment on E-scooter sharing ridership: A tale of five cities. J. Transp. Geogr. 2021, 93, 103084. [Google Scholar] [CrossRef]
- McKenzie, G. Shared micro-mobility patterns as measures of city similarity. In Proceedings of the 1st ACM SIGSPATIAL International Workshop on Computing with Multifaceted Movement Data (MOVE’19), Chicago, IL, USA, 5 November 2019. [Google Scholar] [CrossRef]
- Yan, X.; Yang, W.; Zhang, X.; Xu, Y.; Bejleri, I.; Zhao, X. Do e-scooters fill mobility gaps and promote equity before and during COVID-19? A spatiotemporal analysis using open big data. arXiv 2021, arXiv:2103.09060. [Google Scholar]
- Cao, Z.; Zhang, X.; Chua, K.; Yu, H.; Zhao, J. E-scooter sharing to serve short-distance transit trips: A Singapore case. Transp. Res. Part A Policy Pract. 2021, 147, 177–196. [Google Scholar] [CrossRef]
- Yang, H.; Huo, J.; Bao, Y.; Li, X.; Yang, L.; Cherry, C.R. Impact of e-scooter sharing on bike sharing in Chicago. Transp. Res. Part A Policy Pract. 2021, 154, 23–36. [Google Scholar] [CrossRef]
- Ziedan, A.; Darling, W.; Brakewood, C.; Erhardt, G.; Watkins, K. The impacts of shared e-scooters on bus ridership. Transp. Res. Part A Policy Pract. 2021, 153, 20–34. [Google Scholar] [CrossRef]
- Eccarius, T.; Lu, C.C. Adoption intentions for micro-mobility—Insights from electric scooter sharing in Taiwan. Transp. Res. Part D Transp. Environ. 2020, 84, 102327. [Google Scholar] [CrossRef]
- Sanders, R.L.; Branion-Calles, M.; Nelson, T.A. To scoot or not to scoot: Findings from a recent survey about the benefits and barriers of using E-scooters for riders and non-riders. Transp. Res. Part A Policy Pract. 2020, 139, 217–227. [Google Scholar] [CrossRef]
- Zagorskas, J.; Burinskienė, M. Challenges Caused by Increased Use of E-Powered Personal Mobility Vehicles in European Cities. Sustainability 2020, 12, 273. [Google Scholar] [CrossRef] [Green Version]
- Aman, J.J.; Smith-Colin, J.; Zhang, W. Listen to E-scooter riders: Mining rider satisfaction factors from app store reviews. Transp. Res. Part D Transp. Environ. 2021, 95, 102856. [Google Scholar] [CrossRef]
- Curl, A.; Fitt, H. Same same, but different? Cycling and e-scootering in a rapidly changing urban transport landscape. N. Z. Geogr. 2020. [Google Scholar] [CrossRef]
- Nikiforiadis, A.; Paschalidis, E.; Stamatiadis, N.; Raptopoulou, A.; Kostareli, A.; Basbas, S. Analysis of attitudes and engagement of shared e-scooter users. Transp. Res. Part D Transp. Environ. 2021, 94, 102790. [Google Scholar] [CrossRef]
- Laa, B.; Leth, U. Survey of E-scooter users in Vienna: Who they are and how they ride. J. Transp. Geogr. 2020, 89, 102874. [Google Scholar] [CrossRef]
- Shaheen, S.; Cohen, A. Micromobility Policy Toolkit: Docked and Dockless Bike and Scooter Sharing. UC Berkeley: Transportation Sustainability Research Center. 2019. Available online: https://escholarship.org/uc/item/00k897b5 (accessed on 14 September 2021). [CrossRef]
- Fearnley, N. Micromobility—Regulatory Challenges and Opportunities. In Shaping Smart Mobility Futures: Governance and Policy Instruments in Times of Sustainability Transitions; Emerald Publishing Ltd.: Bingley, UK, 2020; pp. 169–186. [Google Scholar] [CrossRef]
- Moran, M.E.; Laa, B.; Emberger, G. Six scooter operators, six maps: Spatial coverage and regulation of micromobility in Vienna, Austria. Case Stud. Transp. Policy 2020, 8, 658–671. [Google Scholar] [CrossRef]
- Gössling, S. Integrating e-scooters in urban transportation: Problems, policies, and the prospect of system change. Transp. Res. Part D Transp. Environ. 2020, 79, 102230. [Google Scholar] [CrossRef]
- Latinopoulos, C.; Patrier, A.; Sivakumar, A. Planning for e-scooter use in metropolitan cities: A case study for Paris. Transp. Res. Part D Transp. Environ. 2021, 100, 103037. [Google Scholar] [CrossRef]
- Zakhem, M.; Smith-Colin, J. Micromobility implementation challenges and opportunities: Analysis of e-scooter parking and high-use corridors. Transp. Res. Part D Transp. Environ. 2021, 101, 103082. [Google Scholar] [CrossRef]
- Guo, Y.; Chen, Z.; Stuart, A.; Li, X.; Zhang, Y. A systematic overview of transportation equity in terms of accessibility, traffic emissions, and safety outcomes: From conventional to emerging technologies. Transp. Res. Interdiscip. Perspect. 2020, 4, 100091. [Google Scholar] [CrossRef]
- Palm, M.; Farber, S.; Shalaby, A.; Young, M. Equity Analysis and New Mobility Technologies: Toward Meaningful Interventions. J. Plan. Lit. 2021, 36, 31–45. [Google Scholar] [CrossRef]
- Glenn, J.; Bluth, M.; Christianson, M.; Pressley, J.; Taylor, A.; Macfarlane, G.S.; Chaney, R.A. Considering the Potential Health Impacts of Electric Scooters: An Analysis of User Reported Behaviors in Provo, Utah. Int. J. Environ. Res. Public Health 2020, 17, 6344. [Google Scholar] [CrossRef] [PubMed]
- Sikka, N.; Vila, C.; Stratton, M.; Ghassemi, M.; Pourmand, A. Sharing the sidewalk: A case of E-scooter related pedestrian injury. Am. J. Emerg. Med. 2019, 37, 1807.e5–1807.e7. [Google Scholar] [CrossRef]
- Yang, H.; Ma, Q.; Wang, Z.; Cai, Q.; Xie, K.; Yang, D. Safety of micro-mobility: Analysis of E-Scooter crashes by mining news reports. Accid. Anal. Prev. 2020, 143, 105608. [Google Scholar] [CrossRef]
- James, O.; Swiderski, J.; Hicks, J.; Teoman, D.; Buehler, R. Pedestrians and E-Scooters: An Initial Look at E-Scooter Parking and Perceptions by Riders and Non-Riders. Sustainability 2019, 11, 5591. [Google Scholar] [CrossRef] [Green Version]
- Pojani, D.; Kimpton, A.; Sipe, N.; Corcoran, J.; Mateo-Babiano, I.; Stead, D. Setting the agenda for parking research in other cities. In Parking: An International Perspective; Elsevier: Amsterdam, The Netherlands, 2020; pp. 245–260. [Google Scholar] [CrossRef]
- Tuncer, S.; Laurier, E.; Brown, B.; Licoppe, C. Notes on the practices and appearances of e-scooter users in public space. J. Transp. Geogr. 2020, 85, 102702. [Google Scholar] [CrossRef]
- Bai, S.; Jiao, J. From shared micro-mobility to shared responsibility: Using crowdsourcing to understand dockless vehicle violations in Austin, Texas. J. Urban Aff. 2020. [Google Scholar] [CrossRef]
- Brown, A.; Klein, N.J.; Thigpen, C.; Williams, N. Impeding access: The frequency and characteristics of improper scooter, bike, and car parking. Transp. Res. Interdiscip. Perspect. 2020, 4, 100099. [Google Scholar] [CrossRef]
- Hollingsworth, J.; Copeland, B.; Johnson, J.X. Are e-scooters polluters? The environmental impacts of shared dockless electric scooters. Environ. Res. Lett. 2019, 14, 084031. [Google Scholar] [CrossRef]
- Bailey, B.; Sereda, S. The Sharing Economy: Do e-scooters make the cut? Macewan Univ. Stud. eJ. 2020, 4, 1883. [Google Scholar] [CrossRef]
- Arias-Molinares, D.; García-Palomares, J.C. The Ws of MaaS: Understanding mobility as a service from a literature review. Int. Assoc. Traffic Soc. Sci. Res. 2020, 44, 253–263. [Google Scholar] [CrossRef]
- He, S.; Shin, K.G. Dynamic Flow Distribution Prediction for Urban Dockless E-Scooter Sharing Reconfiguration. In Proceedings of the Web Conference 2020, Taipei, Taiwan, 20–23 April 2020; pp. 133–143. [Google Scholar] [CrossRef]
- Ham, S.W.; Cho, J.H.; Park, S.; Kim, D.K. Spatiotemporal Demand Prediction Model for E-Scooter Sharing Services with Latent Feature and Deep Learning. Transp. Res. Rec. 2021. [Google Scholar] [CrossRef]
- Degele, J.; Gorr, A.; Haas, K.; Kormann, D.; Krauss, S.; Lipinski, P.; Tenbih, M.; Koppenhoefer, C.; Fauser, J.; Hertweck, D. Identifying E-Scooter Sharing Customer Segments Using Clustering. In Proceedings of the 2018 IEEE International Conference on Engineering, Technology and Innovation (ICE/ITMC), Stuttgart, Germany, 17–20 June 2018. [Google Scholar] [CrossRef]
- Tuncer, S.; Brown, B. E-scooters on the Ground: Lessons for Redesigning Urban Micro-Mobility. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020. [Google Scholar] [CrossRef]
- Sinnott, R.W. Virtues of the Haversine. S&T 1984, 68, 158. [Google Scholar]
- Luxen, D.; Vetter, C. Real-time routing with OpenStreetMap data. In Proceedings of the 19th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Chicago, IL, USA, 1–4 November 2011; pp. 513–516. [Google Scholar] [CrossRef]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef] [Green Version]
- Bauer, R.; Delling, D.; Sanders, P.; Schieferdecker, D.; Schultes, D.; Wagner, D. Combining hierarchical and goal-directed speed-up techniques for dijkstra’s algorithm. J. Exp. Algorithmics 2010, 15, 303–318. [Google Scholar] [CrossRef] [Green Version]
- Cubukcu, K.M.; Taha, H. Are euclidean distance and network distance related? Environ.-Behav. Proc. J. 2016, 1, 167–175. [Google Scholar] [CrossRef]
- Talas, A.; Pop, F.; Neagu, G. Elastic stack in action for smart cities: Making sense of big data. In Proceedings of the 2017 13th IEEE International Conference on Intelligent Computer Communication and Processing (ICCP), Cluj-Napoca, Romania, 7–9 September 2017; pp. 469–476. [Google Scholar] [CrossRef]
- Sharma, V. Beginning Elastic Stack; Apress: New York, NY, USA, 2016. [Google Scholar] [CrossRef]
- Elkins, D.; Elkins, T.; Hofmeister, B. Berlin: The spatial structure of a Divided City; Routledge: Abingdon, UK, 2005. [Google Scholar]
- Fortunato, G.; Scorza, F.; Murgante, B. Cyclable City: A Territorial Assessment Procedure for Disruptive Policy-Making on Urban Mobility. In Proceedings of the 2019 International Conference on Computational Science and Its Applications, Bengaluru, India, 29 March 2019; pp. 291–307. [Google Scholar]
- Gubman, J.; Jung, A.; Kiel, T.; Strehmann, J. E-Tretroller im Stadtverkehr-Handlungsempfehlungen für Deutsche Städte und Gemeinden zum Umgang mit Stationslosen Verleihsystemen. Agora Verkehrswende. 2019. Available online: https://www.agora-verkehrswende.de/fileadmin/Projekte/2019/E-Tretroller_im_Stadtverkehr/Agora-Verkehrswende_e-Tretroller_im_Stadtverkehr_WEB.pdf (accessed on 14 September 2021).
- Gerike, R.; Hubrich, S.; Ließke, F.; Wittig, S.; Wittwer, R. Sonderauswertung zum Forschungsprojekt “Mobilität in Städten–SrV 2018”. “Friedrich List” Faculty of Transport and Traffic Sciences, Institute of Transport Planning and Road Traffic. 2020. Available online: https://tu-dresden.de/bu/verkehr/ivs/srv/ressourcen/dateien/SrV2018_Staedtevergleich.pdf?lang=de (accessed on 20 September 2021).
- Steinmeyer, I.; Herrmann-Fiechtner, M. Mobilität der Stadt-Berliner Verkehr in Zahlen. Berlin Senate Department for the Environment, Transport and Climate Protection. 2017. Available online: https://www.berlin.de/sen/uvk/_assets/verkehr/verkehrsdaten/zahlen-und-fakten/mobilitaet-der-stadt-berliner-verkehr-in-zahlen-2017/mobilitaet_dt_komplett.pdf (accessed on 20 September 2021).
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Proceedings of the Second International Conference on Knowledge Discovery and Data Mining, Portland, OR, USA, 2–4 August 1996; pp. 226–231. [Google Scholar]
- Schubert, E.; Sander, J.; Ester, M.; Kriegel, H.P.; Xu, X. DBSCAN Revisited, Revisited: Why and How You Should (Still) Use DBSCAN. ACM Trans. Database Syst. 2017, 42, 1–21. [Google Scholar] [CrossRef]
- Kanagala, H.K.; Krishnaiah, V.J.R. A comparative study of K-means, DBSCAN and OPTICS. In Proceedings of the 2016 International Conference on Computer Communication and Informatics (ICCCI), Wuhan, China, 13–15 October 2016. [Google Scholar] [CrossRef]
- Campello, R.J.G.B.; Moulavi, D.; Sander, J. Density-Based Clustering Based on Hierarchical Density Estimates. In Advances in Knowledge Discovery and Data Mining; Hutchison, D., Kanade, T., Kittler, J., Kleinberg, J.M., Mattern, F., Mitchell, J.C., Naor, M., Nierstrasz, O., Pandu Rangan, C., Steffen, B., et al., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2013; Volume 7819, pp. 160–172. [Google Scholar] [CrossRef]
- Lusk, A.C.; Furth, P.G.; Morency, P.; Miranda-Moreno, L.F.; Willett, W.C.; Dennerlein, J.T. Risk of injury for bicycling on cycle tracks versus in the street. Inj. Prev. 2011, 17, 131–135. [Google Scholar] [CrossRef] [PubMed]
- Marqués, R.; Hernández-Herrador, V. On the effect of networks of cycle-tracks on the risk of cycling. The case of Seville. Accid. Anal. Prev. 2017, 102, 181–190. [Google Scholar] [CrossRef]
- Nello-Deakin, S. Is there such a thing as a ‘fair’ distribution of road space? J. Urban Des. 2019, 24, 698–714. [Google Scholar] [CrossRef] [Green Version]
- Strößenreuther, H. Wem gehört die Stadt? Der Flächen-Gerechtigkeits-Report. Mobilität und Flächengerechtigkeit. Eine Vermessung Berliner Straßen; Agentur für clevere Städte: Berlin, Germany, 2014. [Google Scholar]
- Federal Statistical Office of Germany. German Accident Atlas. 2020. Available online: https://unfallatlas.statistikportal.de/ (accessed on 20 September 2021).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subject Area | Focus | References |
|---|---|---|
| Spatiotemporal studies | Temporal and/or spatial | [4,6,8,9,12,13,14,15,16,17,18,19,20,22,23,24,25,26,27] |
| Urban built environments | [4,6,13,23,25] | |
| Intermodal | [8,15,16,20,27,28] | |
| Weather impact | [16,17,18,20] | |
| Trip trajectories | [9] | |
| Impact on other transport modes | [29,30] | |
| Technology adoption and acceptance | Intention to adopt | [31,32] |
| Benefits and barriers | [32,33] | |
| Demographics of riders | [23,24,34,35,36,37,38] | |
| Urban transport integration | Policies and regulations | [3,38,39,40,41,42,43] |
| Transportation equity | [35,44,45] | |
| User behavior and impacts on society | Public health | [46,47,48] |
| Pedestrian interaction | [37,47,48,49,50,51] | |
| Violations | [49,50,51,52,53] | |
| Others | Sustainability and environment | [54,55] |
| Mobility as a service | [56] | |
| Geofences of providers | [40] | |
| Distribution prediction | [43,57,58] | |
| Market growth estimation | [3] | |
| Customer segments | [59] | |
| User experience survey | [60] | |
| Street space allocation | [37] | |
| Micro-mobility reviews | [10,11] |
| Outlier Detection | Charging and Reallocation | |||||||
|---|---|---|---|---|---|---|---|---|
| [m] | [km] | [min] | [h] | [km/h] | [km] | [km/h] | [min] | |
| [12] | <161 | >805 | - | ≥24 | - | - | - | - |
| [52] | - | >32.2 | <1 | - | - | - | - | - |
| [13] | - | >80 | - | ≥12 | >49.9 | - | - | - |
| [14] | <100 | >50 | <1 | ≥24 | >80.5 | - | - | - |
| [18] | - | - | - | >2 | >40.2 | - | - | - |
| [15] | <80 | - | - | - | - | - | >24.1 | >120 |
| [8] | <100 | - | - | - | - | - | >24.1 | >120 |
| [17] | ≤0 | >40 | ≤0 | >8 | >48.3 | - | - | - |
| [16] | <320 | >16 | <2 | >1.5 | >24.1 | - | - | - |
| [9] | <32 | >16 | <2 | >1.5 | >32.2 | - | - | - |
| [23] | - | - | <1 | >2 | ≤0 | - | - | - |
| [24] | ≤0 | - | <1 | >2 | ≤0 | - | - | - |
| Area | Size | Trip Share [%] | Typical Spaces and Building Types | ||
|---|---|---|---|---|---|
| [km2] | [%] | Orig. | Dest. | ||
| Residential | 329.5 | 36.9 | 39 | 43 | Residential buildings |
| Recreation | 136 | 15.3 | 4 | 4 | Parks, sport facilities, city forests |
| Commercial | 66.4 | 7.4 | 11 | 12 | Retail stores, shopping malls, industrial areas, offices |
| Public transport | 19.6 | 2.2 | 22 | 20 | Central station, tram station, train station, subway station |
| Public area | 340.3 | 38.2 | 24 | 21 | Museums, hospitals, libraries, governmental offices, educational institutions |
| Checkpoint Charly | Museum Island | Victory Column | Alexa Centre | Potsdamer Platz | Kurfürstendamm | Central Station | Ostkreuz | Gesundbrunnen | |
|---|---|---|---|---|---|---|---|---|---|
| Central Station | 0.895 | 0.862 | 0.853 | 0.885 | 0.804 | 0.916 | 1 | 0.921 | 0.944 |
| Ostkreuz | 0.809 | 0.803 | 0.781 | 0.880 | 0.819 | 0.917 | 0.921 | 1 | 0.947 |
| Gesundbrunnen | 0.877 | 0.855 | 0.846 | 0.899 | 0.851 | 0.938 | 0.944 | 0.947 | 1 |
| Alexa Centre | 0.896 | 0.793 | 0.832 | 1 | 0.911 | 0.966 | |||
| Potsdamer Platz | 0.871 | 0.806 | 0.845 | 0.911 | 1 | 0.902 | |||
| Kurfürstendamm | 0.900 | 0.813 | 0.833 | 0.966 | 0.902 | 1 | |||
| Checkpoint Charly | 1 | 0.899 | 0.937 | ||||||
| Museum Island | 0.899 | 1 | 0.920 | ||||||
| Victory Column | 0.937 | 0.920 | 1 |
 higher similarity.
higher similarity.Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Heumann, M.; Kraschewski, T.; Brauner, T.; Tilch, L.; Breitner, M.H. A Spatiotemporal Study and Location-Specific Trip Pattern Categorization of Shared E-Scooter Usage. Sustainability 2021, 13, 12527. https://doi.org/10.3390/su132212527
Heumann M, Kraschewski T, Brauner T, Tilch L, Breitner MH. A Spatiotemporal Study and Location-Specific Trip Pattern Categorization of Shared E-Scooter Usage. Sustainability. 2021; 13(22):12527. https://doi.org/10.3390/su132212527
Chicago/Turabian StyleHeumann, Maximilian, Tobias Kraschewski, Tim Brauner, Lukas Tilch, and Michael H. Breitner. 2021. "A Spatiotemporal Study and Location-Specific Trip Pattern Categorization of Shared E-Scooter Usage" Sustainability 13, no. 22: 12527. https://doi.org/10.3390/su132212527
APA StyleHeumann, M., Kraschewski, T., Brauner, T., Tilch, L., & Breitner, M. H. (2021). A Spatiotemporal Study and Location-Specific Trip Pattern Categorization of Shared E-Scooter Usage. Sustainability, 13(22), 12527. https://doi.org/10.3390/su132212527