
Perceived Usefulness of Airborne LiDAR Technology in Road Design and Management: A Review



 and
and 
Abstract
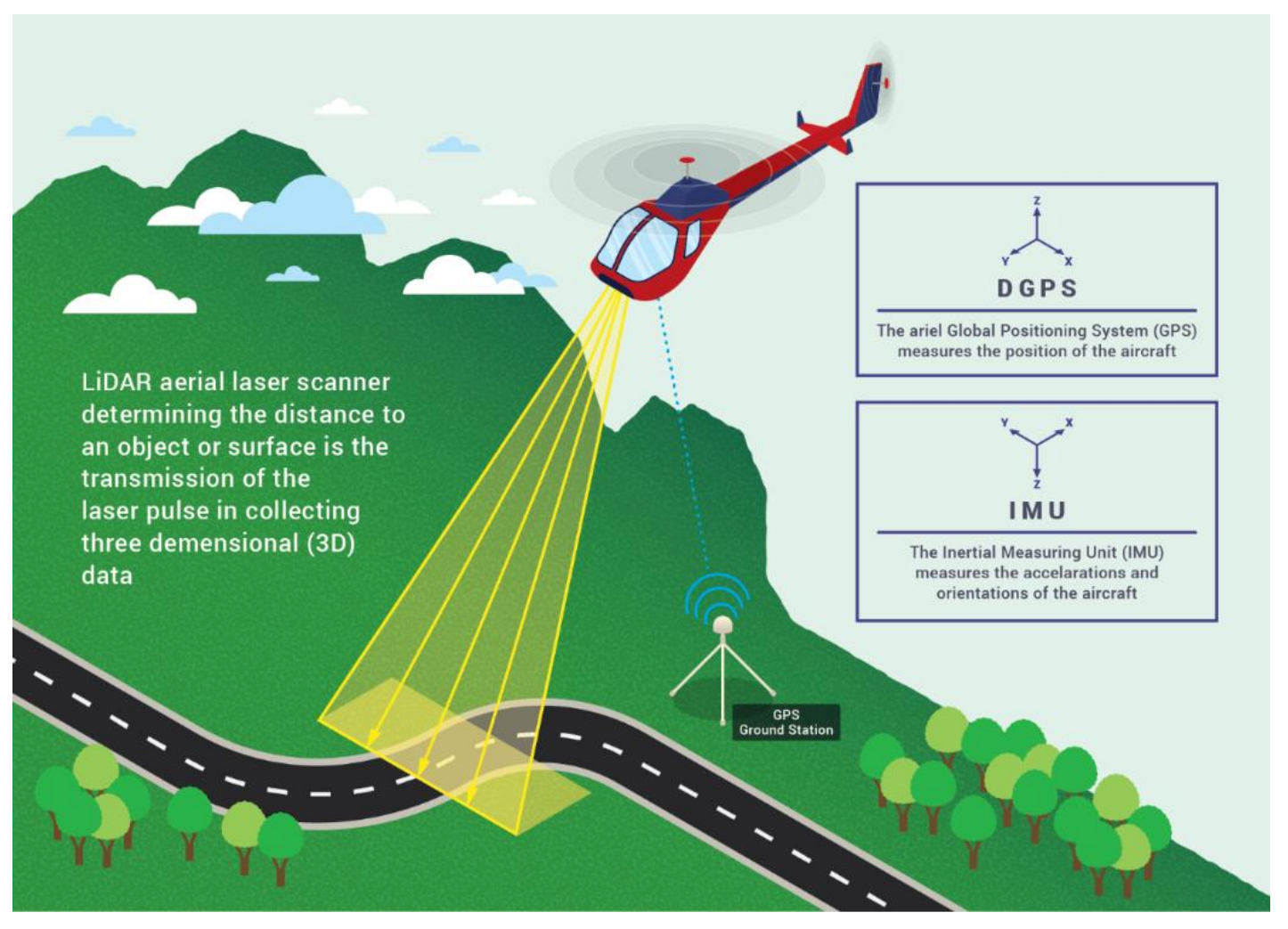
1. Introduction
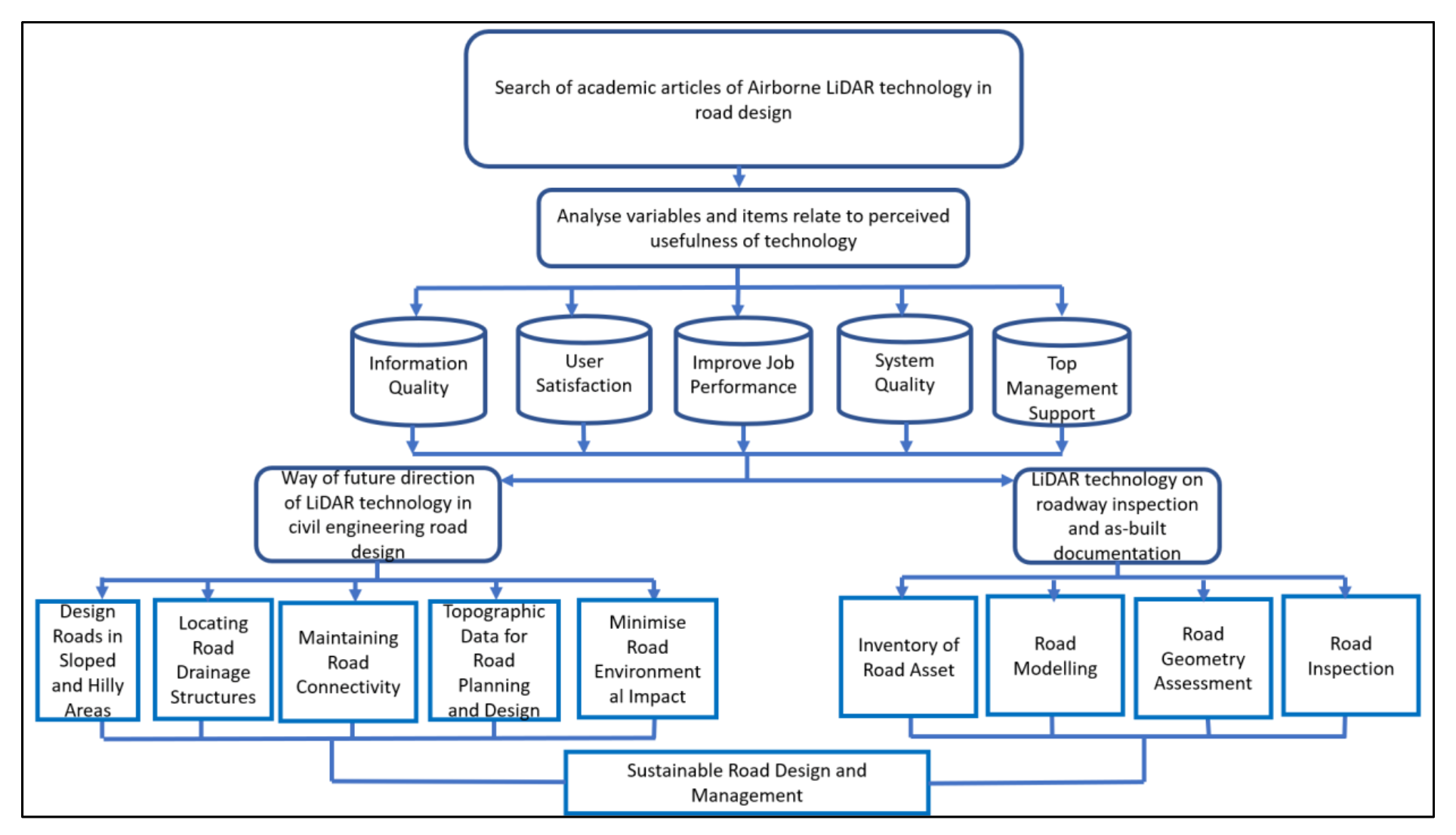
2. Methodology
3. Comparison between Total Station (TS), Airborne LiDAR, and Unmanned Aerial Vehicle (UAV)
4. Implementation of LiDAR in Road Design Based on Previous Studies
5. Perception towards of Factors and Items Regarding the Usefulness of Technology
5.1. Quality Information of Technology
5.2. Users Satisfaction with Technology
5.3. Technology Improves Job Performance
5.4. Quality of Technology System
5.5. Top Management Support for Technology
5.6. Relation among Factors and Items in Implementing Airborne LiDAR Technology for Road Design and Management
6. Future Direction of Airborne LiDAR Technology in Civil Engineering Road Design
6.1. Minimize Road Environmental Impact
6.2. Designing Roads on Slopse and in Hilly Areas
6.3. Locating Road Drainage Structures
6.4. Maintaining Road Connectivity
6.5. LiDAR Data for Road Planning and Design
6.6. Overall Future Direction of Airborne LiDAR Technology Data for Road Planning and Design
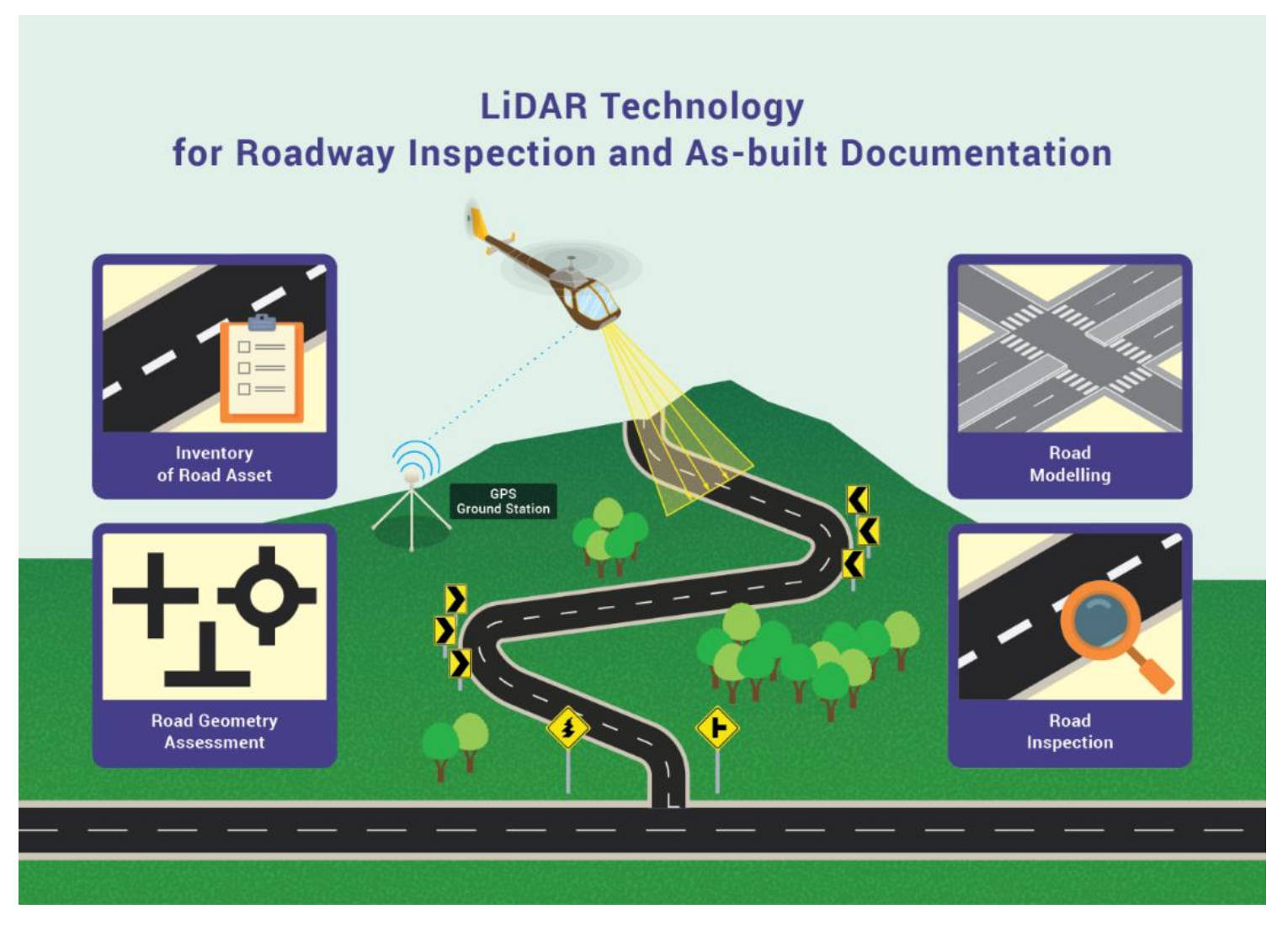
7. LiDAR Technology for Roadway Inspection and As-Built Documentation
7.1. Inventory Road Asset
7.2. Road Inspection
7.3. Road Geometry Assessment
7.4. Road Modelling
7.5. Importance of LiDAR Technology for Roadway Inspection and As-Built Documentation
8. Limitations
9. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DEM | Digital Elevation Model |
| DSM | Digital Surface Model |
| DTM | Digital Terrain Model |
| nDTM | Normalized Digital Terrain Model |
| BEM | Bare Earth Model |
| LiDAR | Light Detection and Ranging |
| UAV | Unmanned Aerial Vehicle |
| TS | Total Station |
| RGB | Red–Green–Blue |
References
- Inti, S.; Kumar, S.A. Sustainable road design through multi-objective optimization: A case study in Northeast India. Transp. Res. Part D Transp. Environ. 2021, 91, 102594. [Google Scholar] [CrossRef]
- Bongiorno, N.; Bosurgi, G.; Carbone, F.; Pellegrino, O.; Sollazzo, G. Potentialities of a Highway Alignment Optimization Method in an I-BIM Environment. Period. Polytech. Civ. Eng. 2019, 63, 352–361. [Google Scholar] [CrossRef]
- Muir, J.; Goodwin, N.; Armston, J.; Phinn, S.; Scarth, P. An Accuracy Assessment of Derived Digital Elevation Models from Terrestrial Laser Scanning in a Sub-Tropical Forested Environment. Remote Sens. 2017, 9, 843. [Google Scholar] [CrossRef]
- Matinnia, B.; Parsakhoo, A.; Mohamadi, J.; Jouibary, S.S. Study of the LiDAR accuracy in mapping forest road alignments and estimating the earthwork volume. J. For. Sci. 2018, 64, 469–477. [Google Scholar] [CrossRef]
- Ferraz, A.; Mallet, C.; Chehata, N. Large-scale road detection in forested mountainous areas using airborne topographic lidar data. ISPRS J. Photogramm. Remote Sens. 2016, 112, 23–36. [Google Scholar] [CrossRef]
- Li, D.; Lu, M. Automated Generation of Work Breakdown Structure and Project Network Model for Earthworks Project Planning: A Flow Network-Based Optimization Approach. J. Constr. Eng. Manag. 2017, 143, 4016086. [Google Scholar] [CrossRef]
- Villar, Y.; Menéndez, M.; Fernández, Z.; Bernardo, A. Sustainable earthworks: Optimization with the ICOM method. Energy Rep. 2020, 6, 404–419. [Google Scholar] [CrossRef]
- Ghanizadeh, A.R.; Heidarabadizadeh, N. Optimization of vertical alignment of highways in terms of earthwork cost using colliding bodies optimization algorithm. Int. J. Optim. Civ. Eng. 2018, 8, 657–674. [Google Scholar]
- Sekulic, M.; Siljeg, A.; Mansourian, A.; Watson, L.; Cavric, B.I. Multi-criteria spatial-based modelling for optimal alignment of roadway by-passes in the Tlokweng planning area, Botswana. J. Spat. Sci. 2020, 1–18. [Google Scholar] [CrossRef]
- Picchio, R.; Pignatti, G.; Marchi, E.; Latterini, F.; Benanchi, M.; Foderi, C.; Venanzi, R.; Verani, S. The Application of Two Approaches Using GIS Technology Implementation in Forest Road Network Planning in an Italian Mountain Setting. Forests 2018, 9, 277. [Google Scholar] [CrossRef]
- Loro, M.; Arce, R.M.; Ortega, E.; Perez, E.O. Identification of optimal landforms to reduce impacts on the landscape using LiDAR for hosting a new highway. Environ. Impact Assess. Rev. 2017, 66, 99–114. [Google Scholar] [CrossRef]
- Buján, S.; Guerra-Hernández, J.; González-Ferreiro, E.; Miranda, D. Forest Road Detection Using LiDAR Data and Hybrid Classification. Remote Sens. 2021, 13, 393. [Google Scholar] [CrossRef]
- Saito, M.; Goshima, M.; Aruga, K.; Matsue, K.; Shuin, Y.; Tasaka, T. Study of automatic forest road design model considering shallow landslides with lidar data of funyu experimental forest. Croat. J. For. Eng. 2013, 34, 1–16. [Google Scholar]
- Abdi, E.; Sisakht, S.R.; Goushbor, L.; Soufi, H. Accuracy assessment of GPS and surveying technique in forest road mapping. Ann. For. Res. 2012, 55, 309–317. [Google Scholar] [CrossRef]
- Myers, D.T.; Rediske, R.R.; McNair, J.N. Measuring Streambank Erosion: A Comparison of Erosion Pins, Total Station, and Terrestrial Laser Scanner. Water 2019, 11, 1846. [Google Scholar] [CrossRef]
- Benyamin, M.; Aidin, P.; Jahangir, M.; Shataee, J.S. Monitoring geometric properties of an existing forest road using airborne Lidar data. J. For. Sci. 2017, 63, 490–495. [Google Scholar] [CrossRef]
- Contreras, M.; Aracena, P.; Chung, W. Improving accuracy in earthwork volume estimation for proposed forest roads using a high-resolution digital elevation model. Croat. J. For. Eng. 2012, 33, 125–142. [Google Scholar]
- Retamozo, S.; Arce, D.; Aguilar, R.; Zvietcovich, F.; Quintana, M.; Castaneda, B.; Angeles, S. A comparison of digital modelling techniques analyzing a section of Qhapaq Ñan. In Proceedings of the 2015 Digital Heritage, Granada, Spain, 28 September–2 October 2015; Volume 1, pp. 147–150. [Google Scholar] [CrossRef]
- Khanal, M.; Hasan, M.; Sterbentz, N.; Johnson, R.; Weatherly, J. Accuracy Comparison of Aerial Lidar, Mobile-Terrestrial Lidar, and UAV Photogrammetric Capture Data Elevations over Different Terrain Types. Infrastructures 2020, 5, 65. [Google Scholar] [CrossRef]
- El-Ashmawy, K.L. A comparison between analytical aerial photogrammetry, laser scanning, total station and global positioning system surveys for generation of digital terrain model. Geocarto Int. 2014, 30, 154–162. [Google Scholar] [CrossRef]
- Carrera-Hernández, J.J.; Levresse, G.; Lacan, P. Is UAV-SfM surveying ready to replace traditional surveying techniques? Int. J. Remote Sens. 2020, 41, 4820–4837. [Google Scholar] [CrossRef]
- Babbel, B.J.; Olsen, M.J.; Che, E.; Leshchinsky, B.A.; Simpson, C.; Dafni, J. Evaluation of Uncrewed Aircraft Systems’ Lidar Data Quality. ISPRS Int. J. Geo-Inf. 2019, 8, 532. [Google Scholar] [CrossRef]
- Holland, D.A.; Pook, C.; Capstick, D.; Hemmings, A. The Topographic Data Deluge—Collecting and Maintaining Data in a 21st Century Mapping Agency. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 727–731. [Google Scholar] [CrossRef]
- Lohani, B.; Ghosh, S. Airborne LiDAR Technology: A Review of Data Collection and Processing Systems. Proc. Natl. Acad. Sci. India Sect. A Phys. Sci. 2017, 87, 567–579. [Google Scholar] [CrossRef]
- Hua, A.K. Perspektif asas Penderiaan Jauh (The basic perspective of Remote Sensing). Geogr. Malays. J. Soc. Sp. 2017, 11, 77–86. [Google Scholar]
- Sharma, M.; Garg, R.D.; Badenko, V.; Fedotov, A.; Min, L.; Yao, A. Potential of airborne LiDAR data for terrain parameters extraction. Quat. Int. 2021, 575–576, 317–327. [Google Scholar] [CrossRef]
- Dong, P.C. LiDAR Remote Sensing and Application; Taylor & Francis: London, UK, 2018. [Google Scholar]
- Bouvier, M.; Durrieu, S.; Fournier, R.A.; Renaud, J.-P. Generalizing predictive models of forest inventory attributes using an area-based approach with airborne LiDAR data. Remote Sens. Environ. 2015, 156, 322–334. [Google Scholar] [CrossRef]
- Fisch, C.; Block, J. Six tips for your (systematic) literature review in business and management research. Manag. Rev. Q. 2018, 68, 103–106. [Google Scholar] [CrossRef]
- Mohammed, S.I. Important methods measurements to exam the accuracy and reliability of reflector-less total station measurements. J. Phys. Conf. Ser. 2021, 1895, 12007. [Google Scholar] [CrossRef]
- Aksamitauskas, V. Česlovas; Kriaučiūnaite-Neklejonoviene, V.; Rekus, D.; Ruzgiene, B.; Puodziukas, V.; Stanionis, A. Advantages of laser scanning systems for topographical surveys in roads engineering. Balt. J. Road Bridg. Eng. 2016, 11, 153–159. [Google Scholar] [CrossRef]
- Zulkipli, M.A.; Tahar, K.N. Multirotor UAV-Based Photogrammetric Mapping for Road Design. Int. J. Opt. 2018, 2018, 1871058. [Google Scholar] [CrossRef]
- Afeni, T.B.; Cawood, F.T. Total station survey monitoring through an observation window: A systematic error correction to remove the effects of glass properties. S. Afr. J. Geomat. 2016, 5, 120. [Google Scholar] [CrossRef][Green Version]
- Landry, S.; St-Laurent, M.-H.; Pelletier, G.; Villard, M.-A. The Best of Both Worlds? Integrating Sentinel-2 Images and Airborne LiDAR to Characterize Forest Regeneration. Remote Sens. 2020, 12, 2440. [Google Scholar] [CrossRef]
- Grohmann, C.H.; Garcia, G.P.; Affonso, A.A.; Albuquerque, R.W. Dune migration and volume change from airborne LiDAR, terrestrial LiDAR and Structure from Motion-Multi View Stereo. Comput. Geosci. 2020, 143, 104569. [Google Scholar] [CrossRef]
- Roussel, J.-R.; Auty, D.; Coops, N.C.; Tompalski, P.; Goodbody, T.R.; Meador, A.S.; Bourdon, J.-F.; de Boissieu, F.; Achim, A. lidR: An R package for analysis of Airborne Laser Scanning (ALS) data. Remote Sens. Environ. 2020, 251, 112061. [Google Scholar] [CrossRef]
- Schumann, G.J.-P.; Moller, D.K.; Ementgen, F. High-Accuracy Elevation Data at Large Scales from Airborne Single-Pass SAR Interferometry. Front. Earth Sci. 2016, 3, 88. [Google Scholar] [CrossRef]
- White, R.A.; Dietterick, B.C.; Mastin, T.; Strohman, R. Forest Roads Mapped Using LiDAR in Steep Forested Terrain. Remote Sens. 2010, 2, 1120–1141. [Google Scholar] [CrossRef]
- Azizi, Z.; Najafi, A.; Sadeghian, S. Forest Road Detection Using LiDAR Data. J. For. Res. 2014, 25, 975–980. [Google Scholar] [CrossRef]
- Akay, A.E.; Wing, M.G.; Sessions, J. Estimating sediment reduction cost for low-volume forest roads using a lidar-derived high-resolution dem. Balt. J. Road Bridg. Eng. 2014, 9, 52–57. [Google Scholar] [CrossRef]
- Parsakhoo, A.; Jajouzadeh, M. Determining an optimal path for forest road construction using Dijkstra’s algorithm. J. For. Sci. 2016, 62, 264–268. [Google Scholar] [CrossRef]
- Matkan, A.A.; Hajeb, M.; Sadeghian, S. Road Extraction from Lidar Data Using Support Vector Machine Classification. Photogramm. Eng. Remote Sens. 2014, 80, 409–422. [Google Scholar] [CrossRef]
- Song, J.; Migliaccio, G.C.; Wang, G.; Lu, H. Exploring the Influence of System Quality, Information Quality, and External Service on BIM User Satisfaction. J. Manag. Eng. 2017, 33, 4017036. [Google Scholar] [CrossRef]
- Diop, E.B.; Zhao, S.; Tran, V.D. Modeling Travelers’ Acceptance of Variable Message Signs: A Hierarchical Hybrid Choice Model. J. Transp. Eng. Part A Syst. 2020, 146, 4020134. [Google Scholar] [CrossRef]
- Wang, C.-H.; Chen, T.-M. Incorporating data analytics into design science to predict user intentions to adopt smart TV with consideration of product features. Comput. Stand. Interfaces 2018, 59, 87–95. [Google Scholar] [CrossRef]
- Juan, Y.-K.; Chen, H.-H.; Chi, H.-Y. Developing and Evaluating a Virtual Reality-Based Navigation System for Pre-Sale Housing Sales. Appl. Sci. 2018, 8, 952. [Google Scholar] [CrossRef]
- Lozada-Martínez, E.; Fernández-Peña, F.; Urrutia-Urrutia, P. Sophomore Students’ Acceptance of Social Media for Managing Georeferenced Data in a Socially-Enhanced Collaborative Learning Process. Adv. Intell. Syst. Comput. 2018, 884, 329–344. [Google Scholar] [CrossRef]
- Altalbe, A.A. Performance Impact of Simulation-Based Virtual Laboratory on Engineering Students: A Case Study of Australia Virtual System. IEEE Access 2019, 7, 177387–177396. [Google Scholar] [CrossRef]
- Ciolkowski, M.; Heidrich, J.; Simon, F.; Radicke, M. Empirical results from using custom-made software project control centers in industrial environments. In Proceedings of the Second ACM-IEEE International Symposium on Empirical Software Engineering and Measurement—ESEM ’08, Kaiserslautern, Germany, 9–10 October 2008; ACM Press: New York, NY, USA, 2008; pp. 243–252. [Google Scholar]
- Mezhuyev, V.; Al-Emran, M.; Ismail, M.A.; Benedicenti, L.; Chandran, D.A.P. The Acceptance of Search-Based Software Engineering Techniques: An Empirical Evaluation Using the Technology Acceptance Model. IEEE Access 2019, 7, 101073–101085. [Google Scholar] [CrossRef]
- Mohagheghi, P.; Gilani, W.; Stefanescu, A.; Fernandez, M.A. An empirical study of the state of the practice and acceptance of model-driven engineering in four industrial cases. Empir. Softw. Eng. 2012, 18, 89–116. [Google Scholar] [CrossRef]
- Madlala, M.; Civilcharran, S.; Singh, U.G. Understanding students’ usage of smartphone applications for learning purposes: A case study. In Proceedings of the 2020 International Conference on Advances in Computing and Communication Engineering (ICACCE), Las Vegas, NV, USA, 22–24 June 2020; pp. 1–5. [Google Scholar]
- Tan, P.J.B.; Hsu, M.-H. Understanding the needs and criteria of employees in the electronics industry for English e-learning website programmes. In Proceedings of the 2017 12th IEEE Conference on Industrial Electronics and Applications (ICIEA), Siem Reap, Cambodia, 18–20 June 2017; pp. 504–509. [Google Scholar]
- Zarei, A.; Mohd-Yusof, K.; Kamaruzaman, M.N.; Kamaruzaman, N.; Hussin, W.N.B.W.; Sharifi, S. Mobile Multimedia Learning Acceptance for Engineering Courses Case Study: Thermodynamics. In Proceedings of the 2017 7th World Engineering Education Forum (WEEF), Kuala Lumpur, Malaysia, 13–16 November 2017; pp. 658–663. [Google Scholar] [CrossRef]
- Hong, W.; Thong, J.Y.; Chasalow, L.C.; Dhillon, G. User Acceptance of Agile Information Systems: A Model and Empirical Test. J. Manag. Inf. Syst. 2011, 28, 235–272. [Google Scholar] [CrossRef]
- Man, S.S.; Xiong, W.; Chang, F.; Chan, A.H.S. Critical Factors Influencing Acceptance of Automated Vehicles by Hong Kong Drivers. IEEE Access 2020, 8, 109845–109856. [Google Scholar] [CrossRef]
- Khamaruddin, P.F.M.; Sauki, A.; Kadri, N.H.O.; Rahim, A.N.C.A.; Kadri, A. Technology Acceptance Model Analysis on Students’ Behavioral Intention of Using Moodle for FYP. In Proceedings of the 2017 7th World Engineering Education Forum (WEEF), Kuala Lumpur, Malaysia, 13–16 November 2017; pp. 724–727. [Google Scholar] [CrossRef]
- Zettel, J. Methodology Support in CASE Tools and Its Impact on Individual Acceptance and Use: A Controlled Experiment. Empir. Softw. Eng. 2005, 10, 367–394. [Google Scholar] [CrossRef]
- Chinyamurindi, W.T.; Louw, G.J. Gender differences in technology acceptance in selected South African companies: Implications for electronic learning. SA J. Hum. Resour. Manag. 2010, 8, 7. [Google Scholar] [CrossRef][Green Version]
- Wallace, L.G.; Sheetz, S.D. The adoption of software measures: A technology acceptance model (TAM) perspective. Inf. Manag. 2014, 51, 249–259. [Google Scholar] [CrossRef]
- Turner, M.; Kitchenham, B.; Brereton, P.; Charters, S.; Budgen, D. Does the technology acceptance model predict actual use? A systematic literature review. Inf. Softw. Technol. 2010, 52, 463–479. [Google Scholar] [CrossRef]
- Caron-Fasan, M.-L.; Lesca, N.; Perea, C.; Beyrouthy, S. Adoption of enterprise social networking: Revisiting the IT innovation adoption model of Hameed et al. J. Eng. Technol. Manag. 2020, 56, 101572. [Google Scholar] [CrossRef]
- Son, H.; Lee, S.; Kim, C. What drives the adoption of building information modeling in design organizations? An empirical investigation of the antecedents affecting architects’ behavioral intentions. Autom. Constr. 2015, 49, 92–99. [Google Scholar] [CrossRef]
- Horton, R.P.; Buck, T.; Waterson, P.E.; Clegg, C.W. Explaining Intranet use with the Technology Acceptance Model. J. Inf. Technol. 2001, 16, 237–248. [Google Scholar] [CrossRef]
- Kumar, J.A.; Bervell, B.; Annamalai, N.; Osman, S. Behavioral Intention to Use Mobile Learning: Evaluating the Role of Self-Efficacy, Subjective Norm, and WhatsApp Use Habit. IEEE Access 2020, 8, 208058–208074. [Google Scholar] [CrossRef]
- Nejkovic, V.; Tošić, M. Exploring factors for effective use of online information in SPOC within the engineering education. Comput. Appl. Eng. Educ. 2018, 26, 1457–1469. [Google Scholar] [CrossRef]
- Iivari, J. Factors affecting perceptions of CASE effectiveness. Eur. J. Inf. Syst. 1995, 4, 143–158. [Google Scholar] [CrossRef]
- Fadhel, I.E.I.; Idrus, S.Z.B.S.; Abdullah, M.S.Y.; Ibrahim, A.A.E.A.; Omar, M.; Saad, S. Nias-mukalla web based systems success measurement and students satisfaction evaluation based on security factor of systems quality engineering theory (ISO 25010) and other factors. Indep. J. Manag. Prod. 2019, 10, 2102–2123. [Google Scholar] [CrossRef]
- Rodger, J.A. An expert system gap analysis and empirical triangulation of individual differences, interventions, and information technology applications in alertness of railroad workers. Expert Syst. Appl. 2020, 144, 113081. [Google Scholar] [CrossRef]
- Tobarra, L.; Robles-Gómez, A.; Pastor, R.; Hernández, R.; Duque, A.; Cano, J. Students’ Acceptance and Tracking of a New Container-Based Virtual Laboratory. Appl. Sci. 2020, 10, 1091. [Google Scholar] [CrossRef]
- Dart, S.; Cunningham-Nelson, S.; Dawes, L. Understanding student perceptions of worked example videos through the technology acceptance model. Comput. Appl. Eng. Educ. 2020, 28, 1278–1290. [Google Scholar] [CrossRef]
- Mezhuyev, V.; Al-Emran, M.; Fatehah, M.; Hong, N.C. Factors Affecting the Metamodelling Acceptance: A Case Study From Software Development Companies in Malaysia. IEEE Access 2018, 6, 49476–49485. [Google Scholar] [CrossRef]
- De Oca, I.M.-M.; Snoeck, M.; Casas-Cardoso, G. A Look into Business Process Modeling Guidelines through the Lens of the Technology Acceptance Model. Inf. Syst. Res. Dev. Appl. Educ. 2014, 197, 73–86. [Google Scholar] [CrossRef]
- Ahmad, H.; Maulud, K.N.A.; Karim, O.A.; Mohd, F.A. Assessment of erosion and hazard in the coastal areas of Selangor. Malays. J. Soc. Space 2021, 17. [Google Scholar] [CrossRef]
- Mahmud, A.R.; Sakawi, Z.; Nizam, K.; Maulud, A. Pakej penambahbaikan EIA di Malaysia: Suatu ulasan kritis dalam aspek kawalan hakisan tanah dan sedimentasi (EIA improvement packages in Malaysia: A critical review with respect to erosion and sedimentation control). Geogr. Malays. J. Soc. Space 2017, 11, 23–35. [Google Scholar]
- Rahman, A.; Mahmud, B.; Sakawi, Z.; Nizam, K.; Abdul, B. Faktor mempengaruhi kualiti Laporan Penilaian Kesan Alam Sekitar di Malaysia Factors influencing the quality of Environmental Impact Assessment Report in Malaysia. Geogr. Malays. J. Soc. Space 2021, 1, 155–165. [Google Scholar]
- Rendana, M.; Rahim, S.A.; Idris, W.M.R.; Lihan, T.; Rahman, Z.A. Soil Erosion Assessment in Tasik Chini Catchment using Remote Sensing and GIS Techniques. Sains Malays. 2017, 46, 529–535. [Google Scholar] [CrossRef]
- Hare, W.; Hossain, S.; Lucet, Y.; Rahman, F. Models and strategies for efficiently determining an optimal vertical alignment of roads. Comput. Oper. Res. 2014, 44, 161–173. [Google Scholar] [CrossRef]
- Chen, W.; Li, X.; Wang, Y.; Chen, G.; Liu, S. Forested landslide detection using LiDAR data and the random forest algorithm: A case study of the Three Gorges, China. Remote Sens. Environ. 2014, 152, 291–301. [Google Scholar] [CrossRef]
- Görüm, T. Landslide recognition and mapping in a mixed forest environment from airborne LiDAR data. Eng. Geol. 2019, 258, 105155. [Google Scholar] [CrossRef]
- Jagodnik, P.; Gazibara, S.B.; Jagodnik, V.; Arbanas, S.M. Types and distribution of quaternary deposits originating from carbonate rock slopes in the vinodol valley, croatia—New insight using airborne lidar data. Mining-Geology-Petroleum Eng. Bull. 2020, 35, 57–77. [Google Scholar] [CrossRef]
- Pellicani, R.; Argentiero, I.; Manzari, P.; Spilotro, G.; Marzo, C.; Ermini, R.; Apollonio, C. UAV and Airborne LiDAR Data for Interpreting Kinematic Evolution of Landslide Movements: The Case Study of the Montescaglioso Landslide (Southern Italy). Geosciences 2019, 9, 248. [Google Scholar] [CrossRef]
- Godone, D.; Giordan, D.; Baldo, M. Rapid mapping application of vegetated terraces based on high resolution airborne LiDAR. Geomat. Nat. Hazards Risk 2018, 9, 970–985. [Google Scholar] [CrossRef]
- Chen, C.; Chang, B.; Li, Y.; Shi, B. Filtering airborne LiDAR point clouds based on a scale-irrelevant and terrain-adaptive approach. Measurement 2021, 171, 108756. [Google Scholar] [CrossRef]
- Zaiedy, N.I.; Malaysia, U.K.; Karim, O.A.; Mutalib, N.A.A. Water Quality of Surface Runoff in Loop Two Catchment Area in UKM. J. Kejuruter. 2016, 28, 65–72. [Google Scholar] [CrossRef]
- Lindsay, J.B.; Dhun, K. Modelling surface drainage patterns in altered landscapes using LiDAR. Int. J. Geogr. Inf. Sci. 2015, 29, 397–411. [Google Scholar] [CrossRef]
- Li, R.; Tang, Z.; Li, X.; Winter, J. Drainage Structure Datasets and Effects on LiDAR-Derived Surface Flow Modeling. ISPRS Int. J. Geo-Inf. 2013, 2, 1136–1152. [Google Scholar] [CrossRef]
- Roelens, J.; Höfle, B.; Dondeyne, S.; Van Orshoven, J.; Diels, J. Drainage ditch extraction from airborne LiDAR point clouds. ISPRS J. Photogramm. Remote Sens. 2018, 146, 409–420. [Google Scholar] [CrossRef]
- Lindsay, J.B.; Francioni, A.; Cockburn, J.M.H. LiDAR DEM Smoothing and the Preservation of Drainage Features. Remote Sens. 2019, 11, 1926. [Google Scholar] [CrossRef]
- Barazzetti, L.; Previtali, M.; Scaioni, M. Roads Detection and Parametrization in Integrated BIM-GIS Using LiDAR. Infrastructures 2020, 5, 55. [Google Scholar] [CrossRef]
- Karila, K.; Matikainen, L.; Puttonen, E.; Hyyppa, J. Feasibility of Multispectral Airborne Laser Scanning Data for Road Mapping. IEEE Geosci. Remote Sens. Lett. 2017, 14, 294–298. [Google Scholar] [CrossRef]
- Reis, B.P.; Martins, S.V.; Filho, E.I.F.; Sarcinelli, T.S.; Gleriani, J.; Marcatti, G.E.; Leite, H.G.; Halassy, M. Management Recommendation Generation for Areas Under Forest Restoration Process through Images Obtained by UAV and LiDAR. Remote Sens. 2019, 11, 1508. [Google Scholar] [CrossRef]
- Bigdeli, B.; Amirkolaee, H.A.; Pahlavani, P. DTM extraction under forest canopy using LiDAR data and a modified invasive weed optimization algorithm. Remote Sens. Environ. 2018, 216, 289–300. [Google Scholar] [CrossRef]
- Fareed, N.; Wang, C.-K. Accuracy Comparison on Culvert-Modified Digital Elevation Models of DSMA and BA Methods Using ALS Point Clouds. ISPRS Int. J. Geo-Inf. 2021, 10, 254. [Google Scholar] [CrossRef]
- Pu, R.; Landry, S. Mapping urban tree species by integrating multi-seasonal high resolution pléiades satellite imagery with airborne LiDAR data. Urban For. Urban Green. 2020, 53, 126675. [Google Scholar] [CrossRef]
- Mayowa, O.O.; Pour, S.H.; Shahid, S.; Mohsenipour, M.; BIN Harun, S.; Heryansyah, A.; Ismail, T. Trends in rainfall and rainfall-related extremes in the east coast of peninsular Malaysia. J. Earth Syst. Sci. 2015, 124, 1609–1622. [Google Scholar] [CrossRef]
- Romali, N.S.; Yusop, Z. Flood damage and risk assessment for urban area in Malaysia. Hydrol. Res. 2021, 52, 142–159. [Google Scholar] [CrossRef]
- Maturidi, A.M.A.M.; Kasim, N.; Abu Taib, K.; Azahar, W.N.A.W.; Tajuddin, H.B.A. Empirically Based Rainfall Threshold for Landslides Occurrence in Peninsular Malaysia. KSCE J. Civ. Eng. 2021, 25, 1–15. [Google Scholar] [CrossRef]
- Hamsan, R.; Hafiz, H.; Azlan, A.; Keprawi, M.F.; Malik, A.K.A.; Adamuddin, A.; Abdullah, A.H.; Shafie, A.M. Pavement condition assessment to forecast maintenance program on JKR state roads in Petaling district. AIP Conf. Proc. 2018, 1930, 020021. [Google Scholar] [CrossRef]
- Zakaria, Z.; Ismail, S.; Yusof, A.M. Effectiveness of Pavement Management System and its Effects to the Closing of Final Account in Construction Project in Malaysia. J. Phys. Conf. Ser. 2013, 423, 012034. [Google Scholar] [CrossRef]
- Falamarzi, A.; Moridpour, S.; Nazem, M. A review on existing sensors and devices for inspecting railway infrastructure. J. Kejuruter. 2019, 31, 1–10. [Google Scholar]
- Gargoum, S.A.; El Basyouny, K. A literature synthesis of LiDAR applications in transportation: Feature extraction and geometric assessments of highways. GISci. Remote Sens. 2019, 56, 864–893. [Google Scholar] [CrossRef]
- Gargoum, S.; El-Basyouny, K. Effects of LiDAR Point Density on Extraction of Traffic Signs: A Sensitivity Study. Transp. Res. Rec. J. Transp. Res. Board 2019, 2673, 41–51. [Google Scholar] [CrossRef]
- He, Y.; Song, Z.; Liu, Z. Updating highway asset inventory using airborne LiDAR. Meas. J. Int. Meas. Confed. 2017, 104, 132–141. [Google Scholar] [CrossRef]
- Javanmardi, M.; Song, Z.; Qi, X. A Fusion Approach to Detect Traffic Signs Using Registered Color Images and Noisy Airborne LiDAR Data. Appl. Sci. 2020, 11, 309. [Google Scholar] [CrossRef]
- Eitel, J.U.H.; Höfle, B.; Vierling, L.A.; Abellan, A.; Asner, G.P.; Deems, J.S.; Glennie, C.L.; Joerg, P.C.; LeWinter, A.L.; Magney, T.S.; et al. Beyond 3-D: The new spectrum of lidar applications for earth and ecological sciences. Remote Sens. Environ. 2016, 186, 372–392. [Google Scholar] [CrossRef]
- Lo, P.-C.; Lo, W.; Wang, T.-T.; Hsieh, Y.-C. Application of Geological Mapping Using Airborne-Based LiDAR DEM to Tunnel Engineering: Example of Dongao Tunnel in Northeastern Taiwan. Appl. Sci. 2021, 11, 4404. [Google Scholar] [CrossRef]
- Yeh, C.-H.; Lin, M.-L.; Chan, Y.-C.; Chang, K.-J.; Hsieh, Y.-C. Dip-slope mapping of sedimentary terrain using polygon auto-tracing and airborne LiDAR topographic data. Eng. Geol. 2017, 222, 236–249. [Google Scholar] [CrossRef]
- Chen, R.; Hsu, Y.; Yu, S.; Chang, K. Real-Time Monitoring of Deep-Seated Gravitational Slope Deformation in the Taiwan Mountain Belt. Eng. Geol. Soc. Territ. 2015, 2, 1333–1336. [Google Scholar] [CrossRef]
- Chhatkuli, S.; Kawamura, K.; Manno, K.; Satoh, T.; Tachibana, K. An approach to automatic detection and hazard risk assessment of large protruding rocks in densely forested hilly region. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B3, 195–199. [Google Scholar] [CrossRef]
- Caudal, P.; Grenon, M.; Turmel, D.; Locat, J. Analysis of a Large Rock Slope Failure on the East Wall of the LAB Chrysotile Mine in Canada: LiDAR Monitoring and Displacement Analyses. Rock Mech. Rock Eng. 2016, 50, 807–824. [Google Scholar] [CrossRef]
- Lee, C.-F.; Huang, W.-K.; Chang, Y.-L.; Chi, S.-Y.; Liao, W.-C. Regional landslide susceptibility assessment using multi-stage remote sensing data along the coastal range highway in northeastern Taiwan. Geomorphology 2018, 300, 113–127. [Google Scholar] [CrossRef]
- Wen, C.; Yang, L.; Li, X.; Peng, L.; Chi, T. Directionally constrained fully convolutional neural network for airborne LiDAR point cloud classification. ISPRS J. Photogramm. Remote Sens. 2020, 162, 50–62. [Google Scholar] [CrossRef]
- Ma, Y.; Zheng, Y.; Cheng, J.; Zhang, Y. Hybrid Model for Realistic and Efficient Estimation of Highway Sight Distance Using Airborne LiDAR Data. J. Comput. Civ. Eng. 2019, 33, 04019039. [Google Scholar] [CrossRef]
- Ural, S.; Shan, J.; Romero, M.A.; Tarko, A. Road and roadside feature extraction using imagery and lidar data for transportation operation. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, II-3/W4, 25–27. [Google Scholar] [CrossRef]
- Erol, S.; Özögel, E.; Kuçak, R.A.; Erol, B. Utilizing airborne LiDAR and UAV photogrammetry techniques in local geoid model determination and validation. ISPRS Int. J. Geo Inf. 2020, 9, 528. [Google Scholar] [CrossRef]
- Chi, Y.-Y.; Lee, Y.-F.; Tsai, S.-E. Study on High Accuracy Topographic Mapping via UAV-based Images. IOP Conf. Ser. Earth Environ. Sci. 2016, 44, 032006. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, X.; Sun, Y.; Zhang, P. Road Centerline Extraction from Very-High-Resolution Aerial Image and LiDAR Data Based on Road Connectivity. Remote Sens. 2018, 10, 1284. [Google Scholar] [CrossRef]
- Kim, J.; Lee, S.; Seo, J.; Lee, D.-E.; Choi, H. The Integration of Earthwork Design Review and Planning Using UAV-Based Point Cloud and BIM. Appl. Sci. 2021, 11, 3435. [Google Scholar] [CrossRef]
- Ronchi, D.; Limongiello, M.; Barba, S. Correlation among Earthwork and Cropmark Anomalies within Archaeological Landscape Investigation by Using LiDAR and Multispectral Technologies from UAV. Drones 2020, 4, 72. [Google Scholar] [CrossRef]
- Parshin, A.V.; Morozov, V.; Blinov, A.V.; Kosterev, A.N.; Budyak, A.E. Low-altitude geophysical magnetic prospecting based on multirotor UAV as a promising replacement for traditional ground survey. Geo-Spat. Inf. Sci. 2018, 21, 67–74. [Google Scholar] [CrossRef]
- Pricope, N.G.; Halls, J.N.; Mapes, K.L.; Baxley, J.B.; Wu, J.J. Quantitative Comparison of UAS-Borne LiDAR Systems for High-Resolution Forested Wetland Mapping. Sensors 2020, 20, 4453. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aspect\Method | Total Station (TS) | Airborne LiDAR | UAV Photogrammetry |
|---|---|---|---|
| Restriction on data collection | Problematic due to overhanging and undercut measurements | Limitation under cloudy and raining | Limitation under cloudy and raining |
| Period of surveying data collection | Time-consuming | Conserves time | Conserves time |
| Coverage area | Covers a wide area | Covers a wide area | Covers a small area |
| Accuracy of data | High-precision measurement with an error up to 1 mm over a hundred meters | 1-m measurement accuracy of surface | Constraint by photographic image |
| Cost | High labour cost and equipment in wide area | High cost | Low cost |
| Author(s)/ Year | Country | LiDAR Data | Methodology | Parameter | Findings |
|---|---|---|---|---|---|
| R.A. White et al., 2010 | California, United States | DEM |
|
|
|
| M. Contreras et al., 2012 | Idaho, United States | DEM |
|
|
|
| M. Saito et al., 2013 | Funyu, Japan | DTM |
|
|
|
| Z. Azizi et al., 2014 | Golestan, Iran | DEM |
|
|
|
| A.Ekay et al., 2014 | Oregon, United States | DEM |
|
|
|
| Parsakhoo and M. Jajouzadeh 2016 | Golestan, Iran | DEM |
|
|
|
| B. Matinnia et al., 2017 | Bahramnia, Iran | DEM |
|
|
|
| B. Matinnia et al., 2018 | Bahramnia, Iran | DEM |
|
|
|
| S. Buján et al., 2021 | Trabada, Spain | DTM |
|
|
|
| Factors | Items | Author(s) | Year(s) |
|---|---|---|---|
| Information quality | Good quality of information results in better selection. | Song et al. | 2017 |
| Diop et al. | 2019 | ||
| Information is presented in a useful format. | Song et al. | 2017 | |
| Wang and Chen | 2018 | ||
| Data information content is valuable and meets our needs. | Song et al. | 2017 | |
| Juan et al. | 2018 | ||
| Lozada Martnez et al. | 2019 | ||
| Essential for learning and understanding content. | Juan et al. Altabe Lozada Martnez et al. | 2018 2019 2019 | |
| Allows complex problems to be solved. | Ciolkowski et al. Altabe Mezhuyev et al. | 2008 2019 2019 | |
| User satisfaction | Satisfied with the technology. | Mohaghehgi et al. Song et al. | 2013 2017 |
| Enables users to visualize and adapt with the real environment. | Juan et al. Madlala et al. | 2018 2020 | |
| Saves time. | Mezhuyev et al. Tan and Hsu | 2019 2018 | |
| The features of new technology releases. | Hong et al. | 2011 | |
| Job performance | Usage of technology will be advantageous to work. | Zerei et al. Man et al. Mezhuyev et al. Tan and Hsu | 2017 2020 2019 2018 |
| Useful for completing a task. | Khamaruddin et al. Man et al. Zettel | 2017 2020 2005 | |
| Tool in the work process. | Chnyamurindi and Low Wallace and Sheetz | 2010 2014 | |
| This measure has been tested and validated. | Wallace and Sheetz | 2014 | |
| Enhances effectiveness at work. | Son et al. Turnet et al. Caron Fasan et al. Zerei et al. Horton et al. | 2015 2010 2020 2017 2001 | |
| Technology facilitates learning. | Lozada Martnez et al. Kumar et al. | 2019 2020 | |
| Increases my interactions with others. | Kumar et al. Nejkovic and Tosic | 2020 2018 | |
| System quality | Increases productivity. | Altalbe Mezhuyev | 2019 2019 |
| The system is functional and compatible. | Iivari Fedhel et al. Rodger Tobarra et al. Dart et al. | 1995 2019 2020 2020 2020 | |
| Assist with meta-modelling in software process development. | Mezhuyev et al. | 2018 | |
| Top management support | Top management should provide training. | Iivari Song et al. | 1995 2017 |
| Vendor should be compatible. | Iivari | 1995 | |
| Top management should provide human resource support for technology. | Song et al. | 2017 | |
| Top management should provide consultation. | Song et al. Fadhel et al. De Oca et al. | 2017 2019 2014 | |
| Top management should provide financial support. | Song et al. | 2017 |
| Future Direction | Author(s) | Year | LiDAR Data | Application/Software/Modelling | Findings |
|---|---|---|---|---|---|
| Minimise road environmental impact | A.E. Akay et al. | 2014 | DTM | 3D Forest Road Alignment Optimization | To calculate quantity of sediment from road systems. |
| Contreras et al. | 2012 | DEM | The computerized model | To reduce the volume of cutting at the slope. | |
| J.M Vilbig et al. | 2014 | DEM | The quasi-network flow | To reduce the volume of cutting at the slope. | |
| W. Chen et al. | 2014 | DTM | LiDAR data and slope images | Assist in identifying a landslide-prone region. | |
| T. Görüm | 2019 | DTM | Landslide Inventory | Reduces landslides in a roadwork area. | |
| M. Saito et al. | 2013 | DTM | Shallow Landslide Risk Map | To consider shallow slides near the road. | |
| Designs roads in Slope and Hilly Areas | P. Jagodnik et al. | 2020 | DTM | Soil Geological Mapping | To detect gravitational mass movement and rockfall occurrence. |
| R. Pellicani et al. D. Gadone et al. | 2019 2018 | DTM | Mapping | To identify characteristics that signal soil failure and detect soil instability. | |
| C. Chen et al. | 2018 | DEM | Progressive TIN Densification (PTD) | To help detect ground movement conditions | |
| Locating road drainage structures | J.B Lindsay and K. Dhun | 2015 | DEM | Least-Cost Breaching | To determine surface drainage channel patterns, particularly those found under bridges and culverts. |
| R. Li et al. | 2012 | DEM | LiDAR-derived hydrologic | To determine drainage patterns. | |
| J. Roelans et al. | 2018 | DEM | LiDAR Dropout Modelling | To determine drainage ditches. | |
| J.B Lindsay et al. | 2019 | DEM | Feature-Preserving Smoothing Method | To determine drainage pattern flow. | |
| Maintaining road connectivity | M. Sharma et al. | 2020 | DSM, BEM | Terrain parameter extraction | For road mapping. |
| S. Buján et al. | 2021 | DTM | Road-mapping | To aid in road connection and new road design. | |
| L. Barazzetti et al. | 2020 | DTM | Model of road networking | To connect existing roads and new roads. | |
| K. Karila et al. | 2016 | DTM | LiDAR-based road-mapping | For road network monitoring. | |
| Topographic data for road planning and design | B. Matinnia et al. | 2017 | DEM | LiDAR road mapping | To aid in road design without time-consuming field surveying methods in broad areas. |
| B.P Reis et al. | 2019 | DTM, DSM, nDSM | LiDAR road networking | Produce the main images in places with dense tree cover to sustain forest regeneration and road network. | |
| B. Bigdeli et al. | 2018 | DTM | Invasive Weed Optimization | To improve accuracy when creating DTM at the forested canopy and steep terrain. | |
| N. Fareed and C. Wang | 2021 | DEM | Drainage Structure Mapping Algorithm | To obtain culvert modified DEMs for hydrological studies on highways. | |
| R. Pu and S. Landry | 2020 | nDSM | Multi-seasonal Pléiades satellite imagery and LiDAR data | To provide accurate tree mapping for maintaining sustainable development area. |
| Road work | Author(s) | Year | LiDAR Data | Findings |
|---|---|---|---|---|
| Inventory road asset | S.A. Gargoum and K. El Basyouny | 2019 2019 | Point cloud | LiDAR point extraction procedure to detect road signs that can be used as an inventory for highway assets. |
| He et al. | 2017 | Point cloud | Extraction from LiDAR points to provide up-to-date data for transportation networks, particularly highway assets. | |
| N. Fareed and C.Wang | 2021 | DEM Point cloud | The Drainage Structure Mapping algorithm is used to acquire data on the location of drainage structures. | |
| M. Javanmardi et al. | 2021 | Airborne georeferenced colour images Noisy data | Histogram height information to detect traffic signs. | |
| Road inspection | J.U.H Eitel et al. | 2016 | DEM | LIDAR data to detect the characteristic features of mass movement. |
| P. Lo et al. | 2021 | DEM | LiDAR data as a geological survey to detect tunnels and slope failure. | |
| C.H. Yeh et al. | 2017 | DEM | LiDAR data provide dip–slope mapping. | |
| R. Chen et al., S. Chhatkuli et al. P. Caudal et al. | 2015 2016 2016 | DEM | LiDAR data can aid with the detection of deep-seated gravitational slope deformation. | |
| C. Lee et al. | 2017 | DEM DTM | LiDAR data to map existing locations as well as areas that may collapse in the future. | |
| Road geometry assessment | C. Wen | 2020 | DTM | LiDAR data can aid in road detection. |
| Y. Ma et al. | 2019 | DSM DTM | Modified Delaunay Triangulation algorithm and a Back-Propagation neural network to estimate sight distance in LiDAR data. | |
| S. Ural et al. | 2015 | DEM DSM nDSM | The extraction of LiDAR to aid in precise road geometric information and future road design planning. | |
| Road modeling | BA.Ferraz et al. | 2015 | DTM | Profile analysis and Object-Based Image Analysis to create 3D geometric characterization representing sections and roads width information for road modelling. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hatta Antah, F.; Khoiry, M.A.; Abdul Maulud, K.N.; Abdullah, A. Perceived Usefulness of Airborne LiDAR Technology in Road Design and Management: A Review. Sustainability 2021, 13, 11773. https://doi.org/10.3390/su132111773
Hatta Antah F, Khoiry MA, Abdul Maulud KN, Abdullah A. Perceived Usefulness of Airborne LiDAR Technology in Road Design and Management: A Review. Sustainability. 2021; 13(21):11773. https://doi.org/10.3390/su132111773
Chicago/Turabian StyleHatta Antah, Fazilah, Muhamad Azry Khoiry, Khairul Nizam Abdul Maulud, and Azlina Abdullah. 2021. "Perceived Usefulness of Airborne LiDAR Technology in Road Design and Management: A Review" Sustainability 13, no. 21: 11773. https://doi.org/10.3390/su132111773
APA StyleHatta Antah, F., Khoiry, M. A., Abdul Maulud, K. N., & Abdullah, A. (2021). Perceived Usefulness of Airborne LiDAR Technology in Road Design and Management: A Review. Sustainability, 13(21), 11773. https://doi.org/10.3390/su132111773