Integrated Approach for the Assessment of Strategies for the Decarbonization of Urban Traffic

 , ,
, ,  , , , , and
, , , , and
Abstract
1. Introduction
2. State of the Art
2.1. Vehicle Design
2.2. Traffic Simulation
- The dynamic assignment replaces the static assignment of origin-destination-pairs to flows on a link by an iterative, time-dependent simulation of trips defined by starting time, origin and destination e.g., [30].
2.3. Charging Concepts
2.4. Life Cycle Perspective
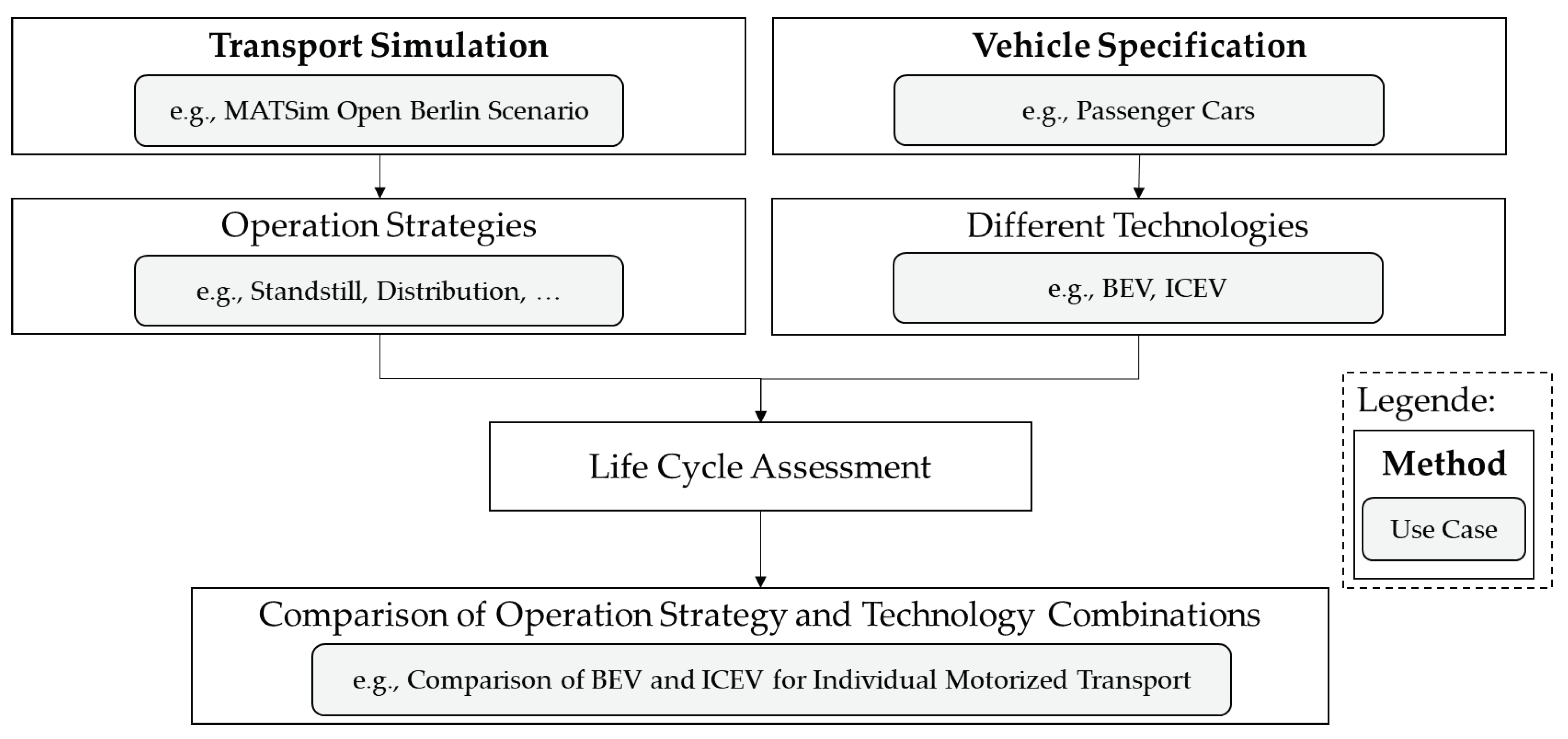
3. Overall Methodology
3.1. Transport Segments
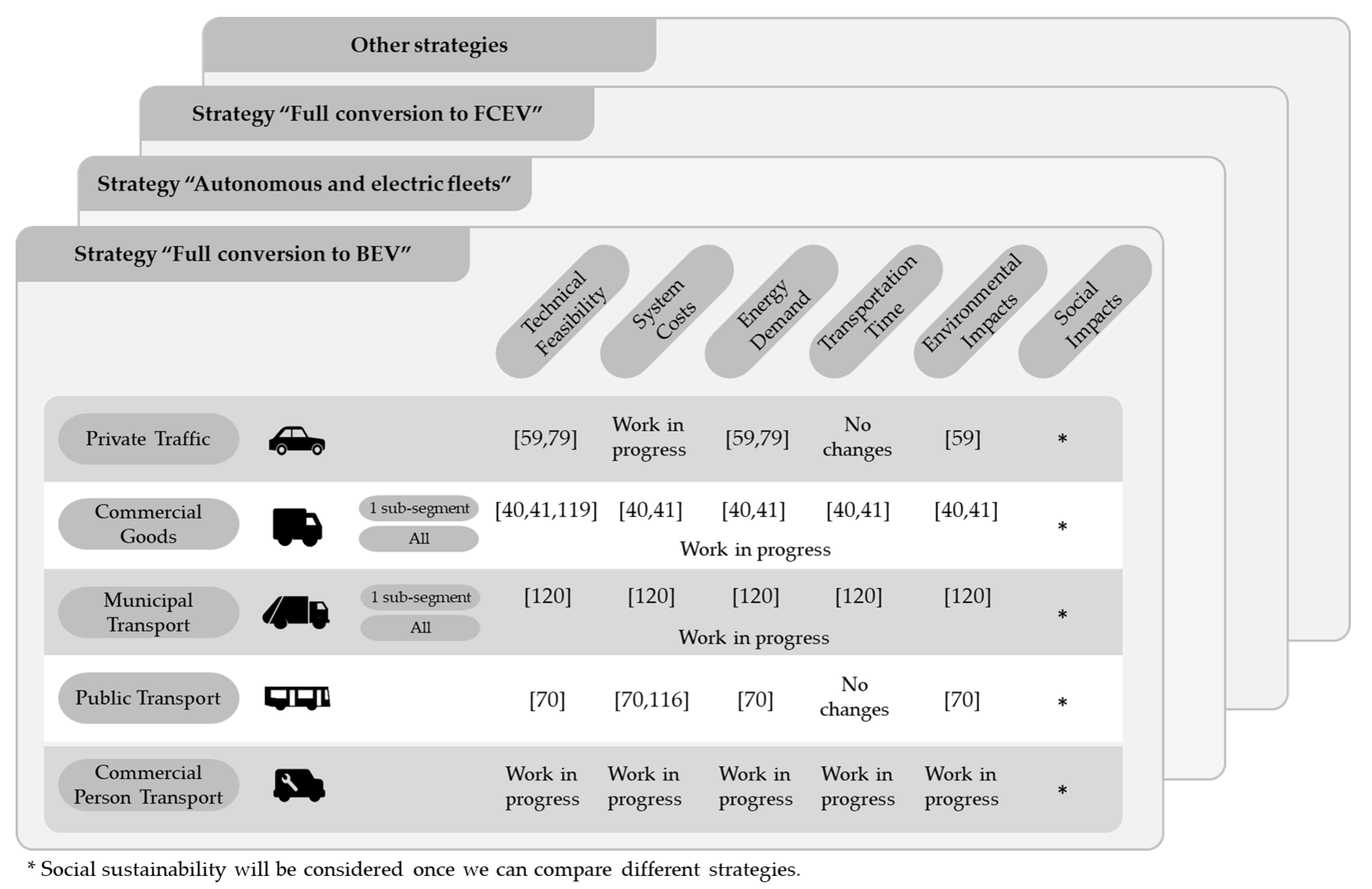
3.2. Possible Decarbonization Strategies
3.3. Segment-Specific Decarbonization Scenarios
4. zeroCUTS Toolbox
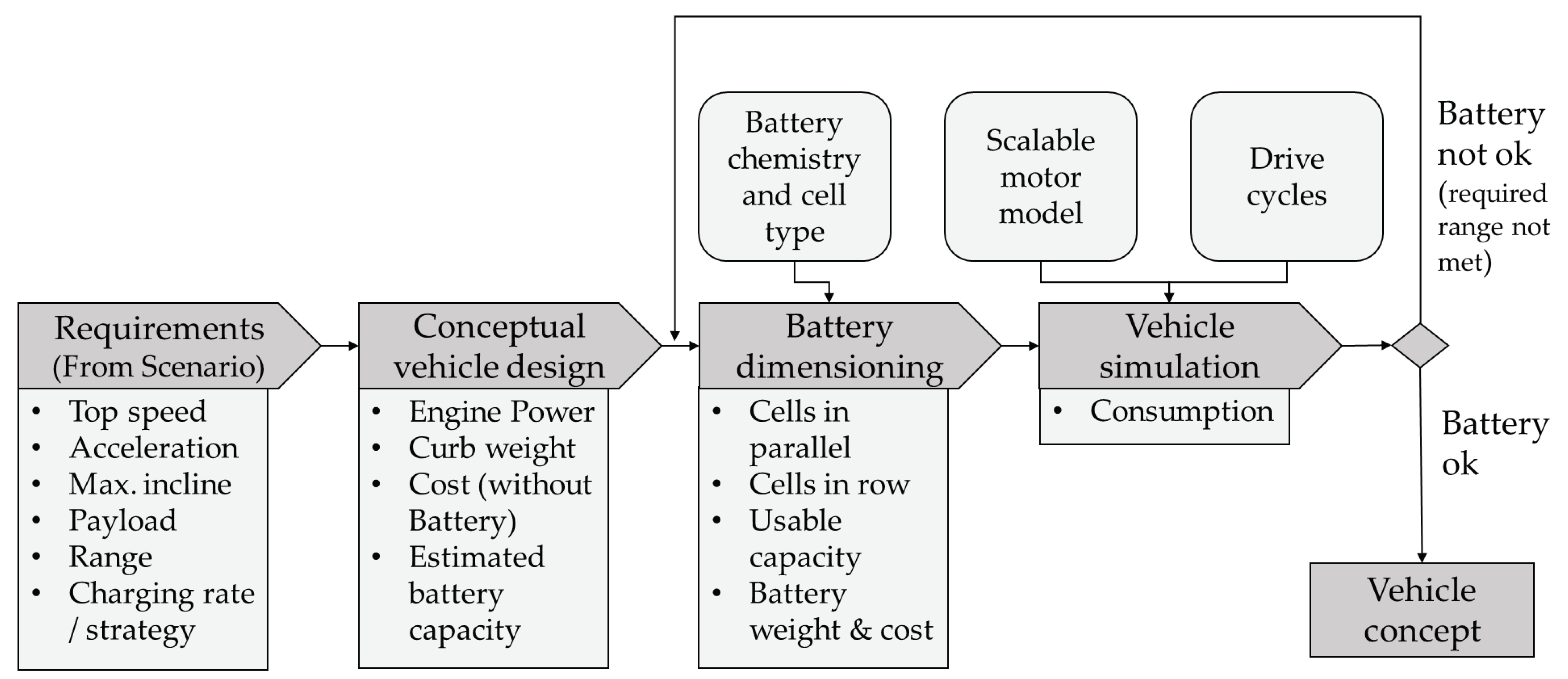
4.1. Conceptual Vehicle Design Method
4.2. Traffic Simulation
- Building a model of the base case
- building a model of the policy case(s) and
- comparing the results, e.g., costs and benefits.
4.3. Electric Bus System Planning
4.4. Charging Methodology for Traffic Simulation
4.5. Life Cycle Assessment of Transport Systems
4.6. Social Sustainability in Automation Technologies
4.7. Total Cost of Ownership
5. First Results
5.1. Private Individual Traffic
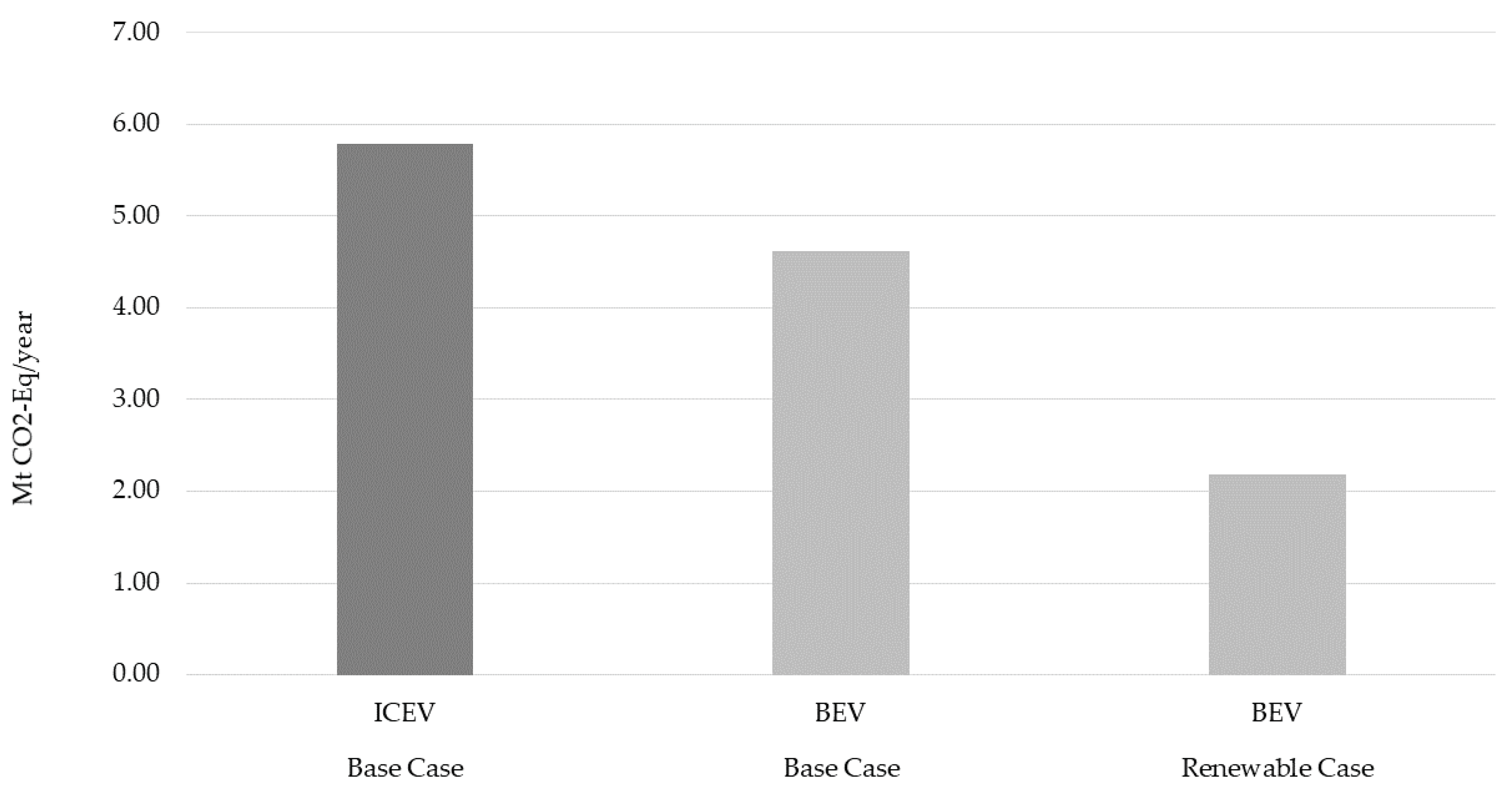
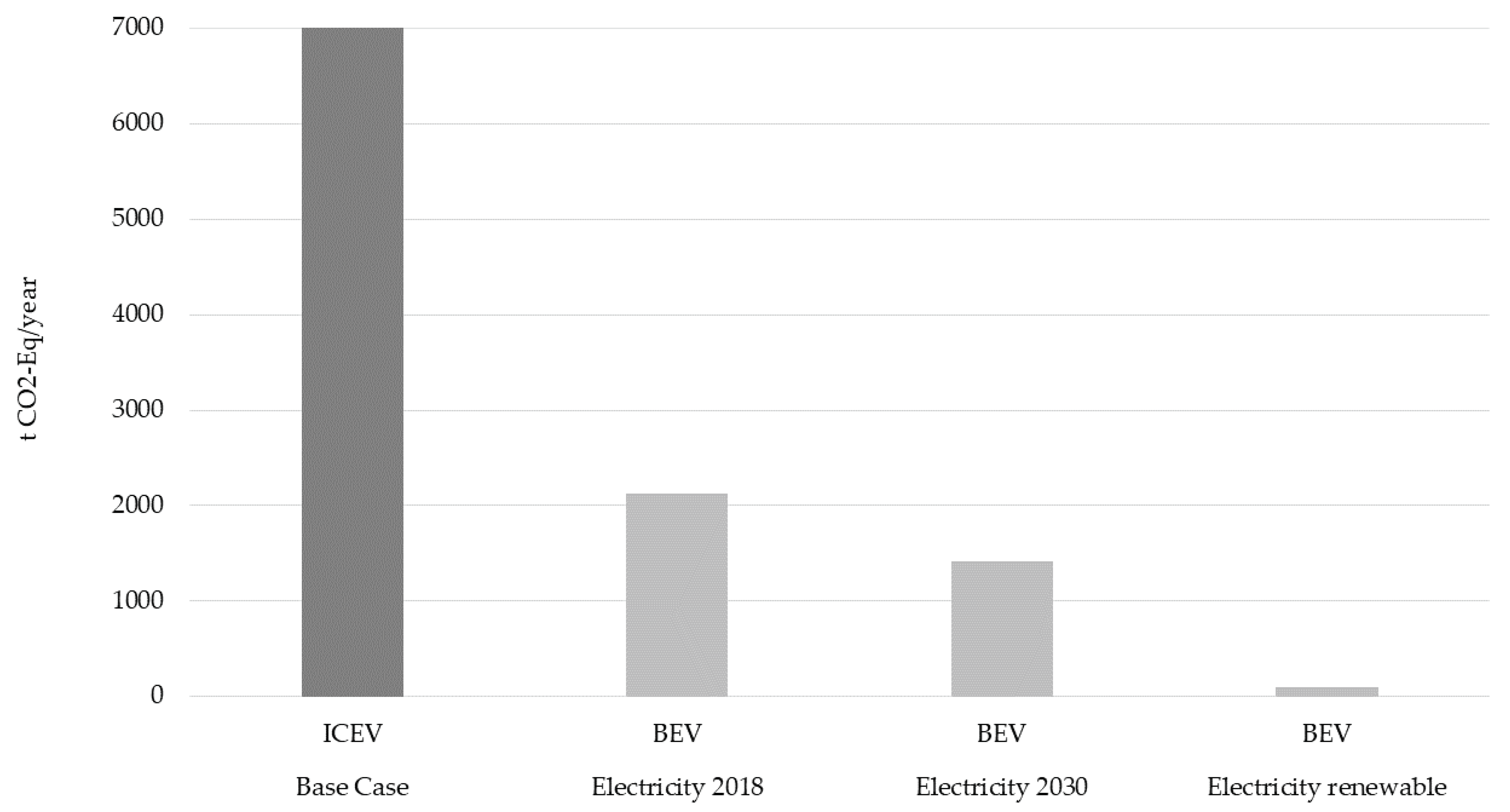
5.1.1. Life Cycle Assessment
- The BEVs offer benefits in the impact categories global warming and photochemical ozone formation potential.
- The ICEVs offer benefits for acidification, particulate matter formation and metal depletion potential.
- Metal depletion for the BEV case is high due to lithium demand for the batteries. However, the potential of recycling has not been considered here.
- However, in some of these categories, BEVs can break even with ICEVs if the vehicles’ lifetime mileage is increased. This is because the BEVs’ emissions are dominated by the production and EoL phases (see Section 4.5).
- The renewable case shows additional BEV advantages for particulate matter formation potential.
5.1.2. Charging Strategies
- Home: With 7.4 kW, almost all vehicles can be charged with 99,709 to 418,420 charging points.
- Workplace: 11 kW is sufficient. In this strategy it is not possible to cover all vehicles, because not every vehicle is used to get to work. Even with an increase in charging power, the proportion of charged vehicles does not increase. The number of charging points is between 64,471 and 235,105.
- Leisure Activities: The same applies to charging during leisure activities. 43 kW would be the optimal charging power. However, this would require expensive fast charging stations. With 22 kW only 5% fewer vehicles can be charged, and the cost of charging stations would be many times lower. The number of charging points is between 345,190 and 545,650.
5.2. Public Transport with Buses
- No current or plausible future electric bus configuration was identified that enables unchanged operation of the vehicle schedules designed for diesel buses. When using depot charging, even with a high vehicle range of 300 km, only 77% of the existing schedules can be covered. For opportunity charging at terminal stops, the current dwell times are often too short to enable stable operation in the presence of delays. Even with a charging power of 450 kW, at least 9% of schedules cannot be serviced.
- Full electrification with new schedules adapted to electric buses will entail an increase in fleet size and cost. Using depot charging vehicles with a range of 120 km would result in a 30% increase in fleet size and an 18% increase in cost compared to the diesel reference case. Using opportunity charging at terminal stops with 300 kW charging power, fleet size and cost would increase by 12% and 14%, respectively. These are technologies readily available today.
- In the future, a range of 300 km for depot charging vehicles appears reasonable; this would, with corresponding schedules, increase the fleet size by just 1% and the cost by 15% compared to diesel. Finally, opportunity charging with 450 kW—already available, but not yet common today—would result in a 9% increase in fleet size and 13% higher cost compared to the diesel case, making it the most cost-competitive option.
5.3. Commercial Goods Traffic
- We observe a cost increase of 11,713 €/day (17%) in total costs for the carriers.
- The overall distance driven (+2.7%) and time travelled (+1.5%) increases slightly. At the same time, the number of vehicles is slightly reduced. This is due to the higher vehicle cost, i.e., the tour planning algorithm tries to save on vehicles at the expense of tour efficiency.
- Fifty-six percent of the resulting tours can be driven with battery electric trucks without recharging during the day. For another 34% of the tours, the tour distance is smaller or equal than twice the net range, i.e., they could be driven with a single recharging during the day. Only 10% of the tours need more than one re-charge during the day.
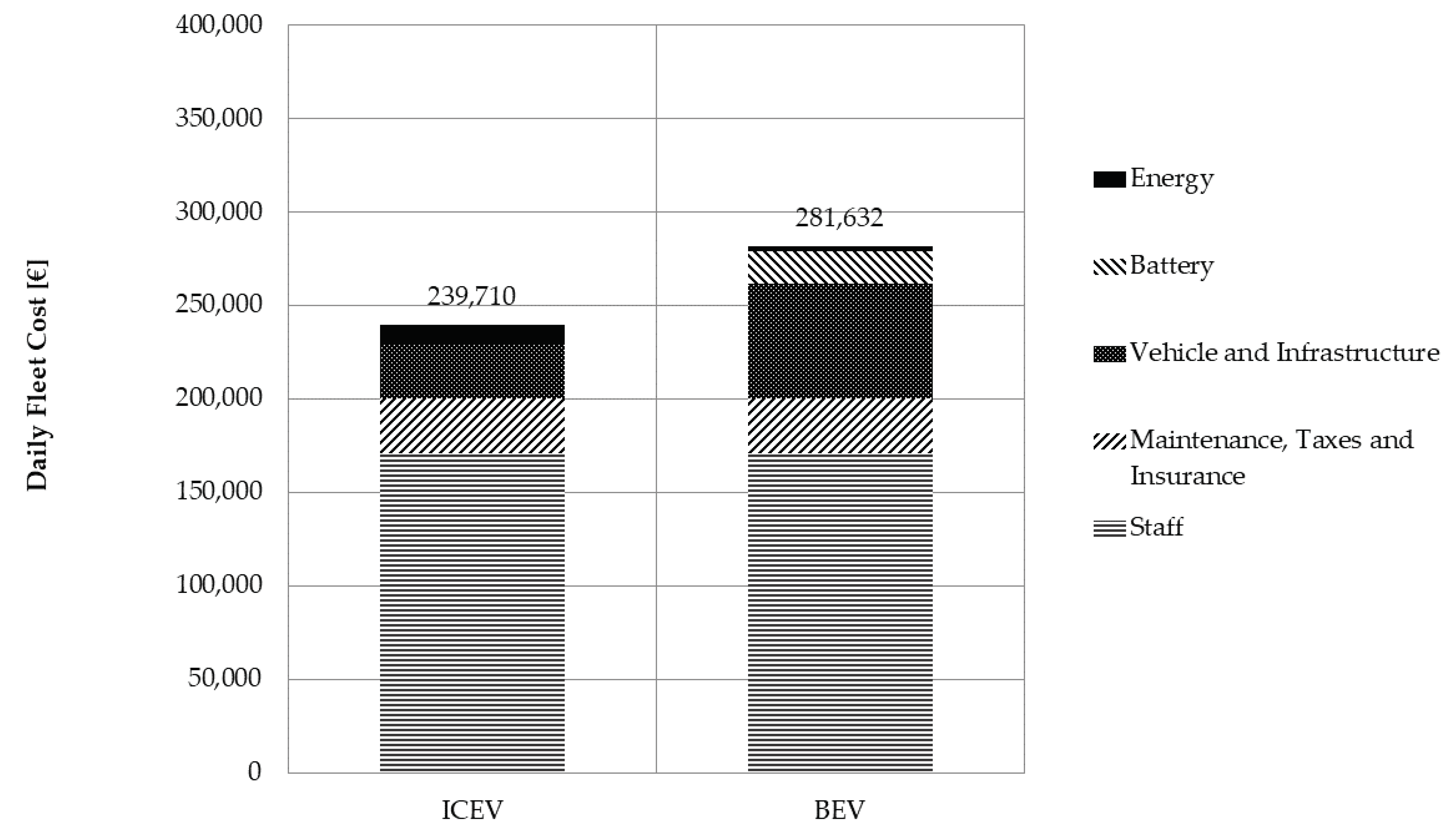
5.4. Municipal Traffic
- No tour is longer than 114 km and needs more than 142 kWh, where the electricity consumption of the waste compression is already included. Somewhat surprisingly, there exist already electric waste collection vehicles that have ranges larger than this and the same waste capacity.
- Investments for charging infrastructure are only necessary for the depots, because only overnight charging is sufficient. No battery exchange is required during the assumed 10 years of operation.
- Assuming that personnel and fleet management costs remain the same between ICEVs and BEVs, the cost maximally increases by 18% which is shown in Figure 8.
6. Discussion and Outlook
- Financial costs to commercial entities includes taxes etc. In an economic appraisal, they cancel out, since, for example, tax losses incurred by commercial entities are compensated for by tax income by the government [121]. Where appropriate, we calculate both financial and economic costs.
- Full economic appraisal includes utility changes that go beyond monetary changes, such as travel time changes, or switching from one destination to another since the relative transport costs to reach them have changed. For example, switching urban person transport from individual cars to mobility-as-a-service means that one may have to wait for a shared vehicle where previously one walked to the individually owned one, and it is not clear into which direction the net effect of this change goes. For our current approach, we mostly assume decarbonization without behavioral changes. In consequence, there are no utility changes, and thus the technological (economic) cost is all there is. Evidently, one could imagine other scenarios that are cheaper on the technological side but put a larger burden on travel times.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Europäische Kommission. Der Europäische Grüne Deal; COM(2019) 640 Final; Europäische Kommission: Berlin, Germany, 2019; Available online: https://eur-lex.europa.eu/legal-content/DE/ALL/?uri=CELEX:52019DC0640 (accessed on 14 January 2021).
- Bundesministerium für Umwelt, Naturschutz und Nukleare Sicherheit (BMU). Klimaschutz in Zahlen. Fakten, Trends und Impulse Deutscher Klimapolitik. Ausgabe 2020. Available online: https://www.bmu.de/fileadmin/Daten_BMU/Pools/Broschueren/klimaschutz_zahlen_2020_broschuere_bf.pdf (accessed on 2 December 2020).
- Brown, A.L.; Fleming, K.L.; Safford, H.R. Prospects for a Highly Electric Road Transportation Sector in the USA. Curr. Sustain. Energy Rep. 2020, 7, 84–93. [Google Scholar] [CrossRef]
- Eckhardt, J.; Lauhkonen, A.; Aapaoja, A. Impact assessment of rural PPP MaaS pilots. Eur. Transp. Res. Rev. 2020, 12. [Google Scholar] [CrossRef]
- Shaheen, S.; Bouzaghrane, M.A. Mobility and Energy Impacts of Shared Automated Vehicles: A Review of Recent Literature. Curr. Sustain. Energy Rep. 2019, 6, 193–200. [Google Scholar] [CrossRef]
- Li, L.; Loo, B.P.Y. Alternative and Transitional Energy Sources for Urban Transportation. Curr. Sustain. Energy Rep. 2014, 1, 19–26. [Google Scholar] [CrossRef]
- Deutsche Forschungsgemeinschaft (DFG). Analyse von Strategien zur vollständigen Dekarbonisierung des Urbanen Verkehrs. Available online: https://gepris.dfg.de/gepris/projekt/398051144?context=projekt&task=showDetail&id=398051144& (accessed on 30 November 2020).
- Syré, A.M.; Grahle, A. zeroCUTS: Zero Carbon Urban Transport System. Available online: https://www.mpm.tu-berlin.de/menue/forschung/projekte/zerocuts/ (accessed on 28 November 2020).
- Damidavičius, J.; Burinskienė, M.; Antuchevičienė, J. Assessing Sustainable Mobility Measures Applying Multicriteria Decision Making Methods. Sustainability 2020, 12, 6067. [Google Scholar] [CrossRef]
- Alves, R.; da Silva Lima, R.; Custódio de Sena, D.; Ferreira de Pinho, A.; Holguín-Veras, J. Agent-Based Simulation Model for Evaluating Urban Freight Policy to E-Commerce. Sustainability 2019, 11, 4020. [Google Scholar] [CrossRef]
- Figliozzi, M.; Saenz, J.; Faulin, J. Minimization of urban freight distribution lifecycle CO2 emissions: Results from an optimization model and a real-world case study. Transp. Policy 2020, 86, 60–68. [Google Scholar] [CrossRef]
- Spangher, L.; Gorman, W.; Bauer, G.; Xu, Y.; Atkinson, C. Quantifying the impact of U.S. electric vehicle sales on light-duty vehicle fleet CO2 emissions using a novel agent-based simulation. Transp. Res. Part D Transp. Environ. 2019, 72, 358–377. [Google Scholar] [CrossRef]
- Dhar, S.; Pathak, M.; Shukla, P.R. Transformation of India’s transport sector under global warming of 2 °C and 1.5 °C scenario. J. Clean. Prod. 2018, 172, 417–427. [Google Scholar] [CrossRef]
- Golightly, D.; Gamble, C.; Palacin, R.; Pierce, K. Multi-modelling for Decarbonisation in Urban Rail Systems. Urban Rail Transit 2019, 5, 254–266. [Google Scholar] [CrossRef]
- Küng, L.; Bütler, T.; Georges, G.; Boulouchos, K. Decarbonizing passenger cars using different powertrain technologies: Optimal fleet composition under evolving electricity supply. Transp. Res. Part C Emerg. Technol. 2018, 95, 785–801. [Google Scholar] [CrossRef]
- Hick, H.; Küpper, K.; Sorger, H. (Eds.) Systems Engineering for Automotive Powertrain Development; Powertrain; Springer International Publishing: Cham, Switzerland, 2020. [Google Scholar] [CrossRef]
- Gascoin, N.; Balasubramanian, E. Innovative Design, Analysis and Development Practices in Aerospace and Automotive Engineering; Springer: Singapore, 2021. [Google Scholar] [CrossRef]
- Gherairi, S. Hybrid Electric Vehicle: Design and Control of a Hybrid System (Fuel Cell/Battery/Ultra-Capacitor) Supplied by Hydrogen. Energies 2019, 12, 1272. [Google Scholar] [CrossRef]
- Lee, J.; Arts, J.; Vanclay, F.; Ward, J. Examining the Social Outcomes from Urban Transport Infrastructure: Long-Term Consequences of Spatial Changes and Varied Interests at Multiple Levels. Sustainability 2020, 12, 5907. [Google Scholar] [CrossRef]
- Göhlich, D.; Fay, T.A.; Park, S. Conceptual Design of Urban E-Bus Systems with Special Focus on Battery Technology. Proc. Des. Soc. Int. Conf. Eng. Des. 2019, 1, 2823–2832. [Google Scholar] [CrossRef]
- Ortúzar, J.D.D.; Willumsen, L.G. Modelling Transport, 4th ed.; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar]
- Bhat, C.; Guo, J.; Srinivasan, S.; Sivakumar, A. CEMDAP User’ s Manual; Version 3.1.; University of Texas at Austin: Austin, TX, USA, 2008. [Google Scholar]
- Bhat, C.; Goulias, K.; Pendyala, R.; Paleti, R.; Sidharthan, R.; Schmitt, L.; Hu, H.H. A household-level activity pattern generation model with an application for Southern California. Transportation 2013, 40, 1063–1086. [Google Scholar] [CrossRef]
- Arentze, T.; Timmermans, H.J.P. (Eds.) ALBATROSS Version 2.0—A Learning Based Transportation Oriented Simulation System; EIRASS (European Institute of Retailing and Services Studies), TU Eindhoven: Eindhoven, The Netherlands, 2005. [Google Scholar]
- Kutter, E.; Mikota, H.J. Weiterentwicklung des Personenverkehrsmodells Berlin auf der Basis der Verkehrsentstehungsmatrix 1986 (BVG); Technical Report; Untersuchung im Auftrag des Senators für Arbeit, Verkehr und Betriebe: Berlin, Germany, 1990. [Google Scholar]
- Mallig, N.; Vortisch, P. Incorporating Stability of Mode Choice into an Agent-Based Travel Demand Model. In Communications in Computer and Information Science, Proceedings of the Highlights of Practical Applications of Cyber-Physical Multi-Agent Systems: International Workshops of PAAMS 2017, Porto, Portugal, 21–23 June 2017; Bajo, J., Ed.; Springer International Publishing: Cham, Switzerland, 2017; pp. 28–39. [Google Scholar] [CrossRef]
- Beckman, R.; Baggerly, K.; McKay, M. Creating synthetic baseline populations. Transp. Res. Part A 1996, 30, 415–429. [Google Scholar] [CrossRef]
- Pritchard, D.; Miller, E. Advances in Agent Population Synthesis and Application in an Integrated Land Use/Transportation Model; Technical Report; University of Toronto, Department of Civil Engineering: Toronto, ON, Canada, 2008. [Google Scholar]
- Ye, X.; Konduri, K.; Pendyala, R.; Sana, B.; Waddell, P. A Methodology to Match Distributions of both Household and Person Attributes in the Generation of Synthetic Populations; Annual Meeting Preprint 09-2096; Transportation Research Board: Washington, DC, USA, 2009. [Google Scholar]
- Chiu, Y.C.; Bottom, J.; Mahut, M.; Paz, A.; Balakrishna, R.; Waller, T.; Hicks, J. A Primer for Dynamic Traffic Assignment; Transportation Research Circular E-C153; Transportation Research Board: Washington, DC, USA, 2011; Available online: http://onlinepubs.trb.org/onlinepubs/circulars/ec153.pdf (accessed on 14 January 2021).
- Balmer, M.; Cetin, N.; Nagel, K.; Raney, B. Towards truly agent-based traffic and mobility simulations. In Proceedings of the Third International Joint Conference on Autonomous Agents and Multiagent Systems (AAMAS’04), New York, NY, USA, 19–23 July 2004. [Google Scholar]
- Hao, J.Y.; Hatzopoulou, M.; Miller, E.J. Integrating an Activity-Based Travel Demand Model with Dynamic Traffic Assignment and Emission Models—Implementation in the Greater Toronto, Canada, Area. Transp. Res. Rec. J. Transp. Res. Board 2010, 2176, 1–13. [Google Scholar] [CrossRef]
- Krajzewicz, D.; Erdmann, J.; Behrisch, M.; Bieker, L. Recent Development and Applications of SUMO-Simulation of Urban MObility. Int. J. Adv. Syst. Meas. 2012, 5, 128–138. [Google Scholar]
- Zheng, H.; Son, Y.J.; Chiu, Y.C.; Head, L.; Feng, Y.; Xi, H.; Kim, S.; Hickman, M. A Primer for Agent-Based Simulation and Modeling in Transportation Applications; Technical Report FHWA-HRT-13-054; Federal Highway Administration: McLean, VA, USA, 2013. Available online: https://www.fhwa.dot.gov/advancedresearch/pubs/13054/index.cfm (accessed on 14 January 2021).
- Auld, J.; Hope, M.B.; Ley, H.; Sokolov, V.; Xu, B.; Zhang, K. POLARIS: Agent-Based Modeling Framework Development and Implementation for Integrated Travel Demand and Network and Operations Simulations; Annual Meeting Preprint 15-5072; Transportation Research Board: Washington, DC, USA, 2015. [Google Scholar]
- Vovsha, P. Microsimulation Travel Models in Practice in the US and Prospects for Agent-Based Approach. In Communications in Computer and Information Science, Proceedings of the Highlights of Practical Applications of Cyber-Physical Multi-Agent Systems: International Workshops of PAAMS 2017, Porto, Portugal, 21–23 June 2017; Bajo, J., Ed.; Springer International Publishing: Cham, Switzerland, 2017; pp. 52–68. [Google Scholar] [CrossRef]
- Nagel, K.; Kickhöfer, B.; Horni, A.; Charypar, D. A Closer Look at Scoring. In The Multi-Agent Transport Simulation MATSim; Horni, A., Nagel, K., Axhausen, K.W., Eds.; Ubiquity: London, UK, 2016; Chapter 3. [Google Scholar] [CrossRef]
- Schröder, S.; Liedtke, G. Modeling and Analyzing the Effects of Differentiated Urban Freight Measures—A Case Study of the Food Retailing Industry; Annual Meeting Preprint 14-5015; Transportation Research Board: Washington, DC, USA, 2014. [Google Scholar]
- Zilske, M.; Joubert, J.W. Freight Traffic. In The Multi-Agent Transport Simulation MATSim; Horni, A., Nagel, K., Axhausen, K.W., Eds.; Ubiquity: London, UK, 2016; Chapter 24. [Google Scholar] [CrossRef]
- Zilske, M.; Schröder, S.; Nagel, K.; Liedtke, G. Adding Freight Traffic to MATSim; VSP Working Paper 12-02; TU Berlin, Transport Systems Planning and Transport Telematics: Berlin, Germany, 2012; Available online: http://www.vsp.tu-berlin.de/publications (accessed on 14 January 2021).
- Martins-Turner, K.; Grahle, A.; Nagel, K.; Göhlich, D. Electrification of Urban Freight Transport—A Case Study of the Food Retailing Industry. Procedia Comput. Sci. 2020, 170, 757–763. [Google Scholar] [CrossRef]
- Ewert, R.; Martins-Turner, K.; Thaller, C.; Nagel, K. Using a Route-Based and Vehicle Type Specific Range Constraint for Improving Vehicle Routing Problems with Electric Vehicles; VSP Working Paper; TU Berlin, Transport Systems Planning and Transport Telematics: Berlin, Germany, 2020; Available online: http://www.vsp.tu-berlin.de/publications (accessed on 14 January 2021).
- Karohs, K.; Göhlich, D.; Lauth, E. Research Campus Mobility2Grid: From Lab to Reality. In Proceedings of the 2nd E-Mobility Power System Integration Symposium, Stockholm, Sweden, 15 October 2018; pp. 1–7. [Google Scholar]
- Morrissey, P.; Weldon, P.; O’Mahony, M. Future standard and fast charging infrastructure planning: An analysis of electric vehicle charging behaviour. Energy Policy 2016, 89, 257–270. [Google Scholar] [CrossRef]
- Almaghrebi, A.; Aljuheshi, F.; Rafaie, M.; James, K.; Alahmad, M. Data-Driven Charging Demand Prediction at Public Charging Stations Using Supervised Machine Learning Regression Methods. Energies 2020, 13, 4231. [Google Scholar] [CrossRef]
- Micari, S.; Polimeni, A.; Napoli, G.; Andaloro, L.; Antonucci, V. Electric vehicle charging infrastructure planning in a road network. Renew. Sustain. Energy Rev. 2017, 80, 98–108. [Google Scholar] [CrossRef]
- Guo, C.; Yang, J.; Yang, L. Planning of Electric Vehicle Charging Infrastructure for Urban Areas with Tight Land Supply. Energies 2018, 11, 2314. [Google Scholar] [CrossRef]
- Marquez-Fernandez, F.J.; Bischoff, J.; Domingues-Olavarria, G.; Alakula, M. Using Multi-Agent Transport Simulations to Assess the Impact of EV Charging Infrastructure Deployment. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Detroit, MI, USA, 19–21 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Liimatainen, H.; van Vliet, O.; Aplyn, D. The potential of electric trucks—An international commodity-level analysis. Appl. Energy 2019, 236, 804–814. [Google Scholar] [CrossRef]
- Bradley, L. Charging Infrastructure Strategies: Maximizing the Deployment of Electric Drayage Trucks in Southern California. 2019. Available online: https://escholarship.org/uc/item/7pk425v7 (accessed on 14 January 2021).
- Brundtland. Brundtland Comission Report: Our Common Future: Report of the World Commission on Environment and Development; Oxford University Press: New York, NY, USA, 1987. [Google Scholar]
- Elkington, J. Accounting for the Triple Bottom Line. Meas. Bus. Excell. 1998, 2, 18–22. [Google Scholar] [CrossRef]
- McKenzie, S. Social Sustainability: Towards Some Definitions. 2004. Available online: https://www.unisa.edu.au/siteassets/episerver-6-files/documents/eass/hri/working-papers/wp27.pdf (accessed on 14 January 2021).
- DIN e. V. DIN EN ISO 14040: Umweltmanagement–Ökobilanz—Grundsätze und Rahmenbedingungen (ISO 14040:2006); Deutsche und Englische Fassung EN ISO 14040:2006; DIN: Berlin, Germany, November 2009. [Google Scholar] [CrossRef]
- Peters, J.F.; Baumann, M.; Zimmermann, B.; Braun, J.; Weil, M. The environmental impact of Li-Ion batteries and the role of key parameters—A review. Renew. Sustain. Energy Rev. 2017, 67, 491–506. [Google Scholar] [CrossRef]
- Helms, H.; Kämper, C.; Biemann, K.; Lambrecht, U.; Julius, J.; Meyer, K. Klimabilanz von Elektroautos. Einflussfaktoren und Verbesserungspotenzial. 2019. Available online: https://www.agora-verkehrswende.de/veroeffentlichungen/klimabilanz-von-elektroautos/ (accessed on 14 January 2021).
- Burchart-Korol, D.; Jursova, S.; Folęga, P.; Korol, J.; Pustejovska, P.; Blaut, A. Environmental life cycle assessment of electric vehicles in Poland and the Czech Republic. J. Clean. Prod. 2018, 202, 476–487. [Google Scholar] [CrossRef]
- Del Pero, F.; Delogu, M.; Pierini, M. Life Cycle Assessment in the automotive sector: A comparative case study of Internal Combustion Engine (ICE) and electric car. Procedia Struct. Integr. 2018, 12, 521–537. [Google Scholar] [CrossRef]
- Jaeger, F.A.; Müller, K.; Petermann, C.; Lesage, E. LCA in Strategic Decision Making for Long Term Urban Transportation System Transformation. In Designing Sustainable Technologies, Products and Policies; Benetto, E., Gericke, K., Guiton, M., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 193–204. [Google Scholar] [CrossRef]
- Syré, A.M.; Heining, F.; Göhlich, D. Method for a Multi-Vehicle, Simulation-Based Life Cycle Assessment and Application to Berlin’s Motorized Individual Transport. Sustainability 2020, 12, 7302. [Google Scholar] [CrossRef]
- Martinez, L.M.; Viegas, J.M. Assessing the impacts of deploying a shared self-driving urban mobility system: An agent-based model applied to the city of Lisbon, Portugal. Int. J. Transp. Sci. Technol. 2017, 6, 13–27. [Google Scholar] [CrossRef]
- Tractica. Robotics Market Revenue Worldwide 2017/2025|Statista. 2018. Available online: https://www.statista.com/statistics/760190/worldwide-robotics-market-revenue/ (accessed on 14 January 2020).
- Grahle, A.; Song, Y.W.; Brüske, K.; Bender, B.; Göhlich, D. Autonomous shuttles for urban mobility on demand applications—ecosystem dependent requirement elicitation. Proc. Des. Soc. Des. Conf. 2020, 1, 887–896. [Google Scholar] [CrossRef]
- Schneider, J. Studio LS301 Casestudy Sweep. 27 October 2019. Available online: https://www.studio-hint.com/studio-ls301-casestudy-sweep.html (accessed on 4 November 2019).
- MPM TU Berlin. MURMEL: Mobiler Urbaner Roboter zur MüllEimer Leerung. 2019. Available online: https://www.mpm.tu-berlin.de/menue/forschung/projekte/murmel/ (accessed on 4 November 2019).
- Kattwinkel, D.; Song, Y.W.; Bender, B. Analysis of ecodesign and sustainable design in higher education. In Proceedings of the Design 2018 15th International Design Conference, Dubrovnic, Croatia, 21–24 May 2018; Faculty of Mechanical Engineering and Naval Architecture, University of Zagreb: Zagreb, Croatia; The Design Society: Glasgow, UK, 2018; pp. 2451–2460. [Google Scholar] [CrossRef]
- Buchert, T.; Stark, R. Decision support tool to derive sustainable product configurations as A basis for conceptual design. In Proceedings of the DESIGN 2018 15th International Design Conference, Dubrovnic, Croatia, 21–24 May 2018; Faculty of Mechanical Engineering and Naval Architecture, University of Zagreb: Zagreb, Croatia; The Design Society: Glasgow, UK, 2018; pp. 2609–2620. [Google Scholar] [CrossRef]
- Benoît, C.; Mazijn, B. Guidelines for Social Life Cycle Assessment of Products; [deslibris e-book] ed.; United Nations Environment Programme: Paris, France, 2009. [Google Scholar]
- Schulte, J.; Hallstedt, S.I. Sustainability risk management for product innovation. In Proceedings of the DESIGN 2018 15th International Design Conference, Dubrovnic, Croatia, 21–24 May 2018; Faculty of Mechanical Engineering and Naval Architecture, University of Zagreb: Zagreb, Croatia; The Design Society: Glasgow, UK, 2018; pp. 655–666. [Google Scholar] [CrossRef]
- Kunith, A.; Mendelevitch, R.; Goehlich, D. Electrification of a city bus network—An optimization model for cost-effective placing of charging infrastructure and battery sizing of fast-charging electric bus systems. Int. J. Sustain. Transp. 2017, 11, 707–720. [Google Scholar] [CrossRef]
- Jefferies, D.; Göhlich, D. A Comprehensive TCO Evaluation Method for Electric Bus Systems Based on Discrete-Event Simulation Including Bus Scheduling and Charging Infrastructure Optimisation. World Electr. Veh. J. 2020, 11, 56. [Google Scholar] [CrossRef]
- Ehmke, J.F. Integration of Information and Optimization Models for Routing in City Logistics; International Series in Operations Research & Management Science; Springer Science + Business Media: Berlin/Heidelberg, Germany, 2012; Volume 177. [Google Scholar]
- Verein Netzwerk Logistik (VNL). Logistik-Wörterbuch. Hub and Spoke Systeme. Available online: https://www.vnl.at/de/services/logistik-woerterbuch/logistik-woerterbuch-detail/?no_cache=1&tx_ecxdictionary_pi%5Bitem%5D=196 (accessed on 2 December 2020).
- Wermuth, M. Personen- und Personenwirtschaftsverkehr. In Handbuch Verkehrspolitik; Springer Nature: Berlin/Heidelberg, Germany, 2007; pp. 323–347. [Google Scholar] [CrossRef]
- Coppola, P.; Esztergár-Kiss, D. (Eds.) Autonomous Vehicles and Future Mobility; Elsevier: Amsterdam, The Netherlands; Cambridge, MA, USA, 2019. [Google Scholar]
- Axhausen, K.W. Sind wir bald alle Passagiere? Neue Zür. Ztg. 2016, 4, 2016. [Google Scholar]
- Bischoff, J. Friend or foe? A data driven analysis of free-floating car sharing and taxi traffic in Berlin. Presented at the NECTAR Cluster 8 Workshop, Sevilla, Spain, 10–11 March 2016. [Google Scholar]
- Basu, R.; Araldo, A.; Akkinepally, A.P.; Nahmias Biran, B.H.; Basak, K.; Seshadri, R.; Deshmukh, N.; Kumar, N.; Azevedo, C.L.; Ben-Akiva, M. Automated Mobility-on-Demand vs. Mass Transit: A Multi-Modal Activity-Driven Agent-Based Simulation Approach. Transp. Res. Rec. J. Transp. Res. Board 2018, 2672, 608–618. [Google Scholar] [CrossRef]
- Bundesministerium für Wirtschaft und Energie. Nationales Reformprogramm 2020—Die Nationale Wasserstoffstrategie. Available online: https://www.bmbf.de/files/die-nationale-wasserstoffstrategie.pdf (accessed on 14 December 2020).
- Jahn, R.M.; Syré, A.; Grahle, A.; Schlenther, T.; Göhlich, D. Methodology for Determining Charging Strategies for Urban Private Vehicles based on Traffic Simulation Results. Procedia Comput. Sci. 2020, 170, 751–756. [Google Scholar] [CrossRef]
- Bischoff, J.; Maciejewski, M. Electric taxis in Berlin—Analysis of the feasibility of a large-scale transition. In Tools of Transport Telematics; Mikulski, J., Ed.; Springer International Publishing: Cham, Switzerland, 2015. [Google Scholar] [CrossRef]
- Levinson, D.M.; Krizek, K.J. The End of Traffic and the Future of Transport, 2nd ed.; Amazon Digital Services LLC: Seattle, WA, USA, 2015. [Google Scholar]
- Bischoff, J.; Maciejewski, M. Simulation of City-wide Replacement of Private Cars with Autonomous Taxis in Berlin. Procedia Comput. Sci. 2016, 83, 237–244. [Google Scholar] [CrossRef]
- Pavone, M. Autonomous Mobility-on-Demand Systems for Future Urban Mobility. In Autonomes Fahren: Technische, Rechtliche und Gesellschaftliche Aspekte; Maurer, M., Gerdes, J.C., Lenz, B., Winner, H., Eds.; Springer: Berlin/Heidelberg, Germany, 2015; pp. 399–416. [Google Scholar] [CrossRef]
- Wagner, P. Steuerung und Management in einem Verkehrssystem mit autonomen Fahrzeugen. Auton. Fahr. 2015, 313–330. [Google Scholar] [CrossRef]
- Von Mach, S.; Buschbeck, J.; Flerlage, H.; Zimmermann, U.; Boev, P. Die Entwicklung und Markteinführung des TALENT 3 Batterietriebzuges. Eisenbahntech. Rundsch. 2018, 9, 115–119. [Google Scholar]
- ZeEUS Project. ZeEUS eBus Report #2: An Updated Overview of Electric Buses in Europe. 2018. Available online: http://zeeus.eu/uploads/publications/documents/zeeus-report2017-2018-final.pdf (accessed on 25 June 2020).
- Lajunen, A.; Lipman, T. Lifecycle cost assessment and carbon dioxide emissions of diesel, natural gas, hybrid electric, fuel cell hybrid and electric transit buses. Energy 2016, 106, 329–342. [Google Scholar] [CrossRef]
- Leich, G.; Bischoff, J. Should Autonomous Shared Taxis Replace Buses? A Simulation Study; VSP Working Paper 18-05; TU Berlin, Transport Systems Planning and Transport Telematics: Berlin, Germany, 2018; Available online: http://www.vsp.tu-berlin.de/publications (accessed on 14 January 2021).
- Pakusch, C.; Stevens, G.; Boden, A.; Bossauer, P. Unintended Effects of Autonomous Driving: A Study on Mobility Preferences in the Future. Sustain. Sci. Pract. Policy 2018, 10, 2404. [Google Scholar] [CrossRef]
- Daimler AG. Vision Urbanetic. Available online: https://www.mercedes-benz.com/en/vehicles/transporter/vision-urbanetic-the-mobility-of-the-future/ (accessed on 1 December 2020).
- Toyota Motor Corporation. e-Palette Concept. Available online: https://www.toyota-global.com/pages/contents/innovation/intelligent_transport_systems/world_congress/2018copenhagen/pdf/e-Palette_CONCEPT.pdf (accessed on 1 December 2020).
- Schlenther, T.; Martins-Turner, K.; Bischoff, J.F.; Nagel, K. Potential of Private Autonomous Vehicles for Parcel Delivery. Transp. Res. Rec. 2020, 2674, 520–531. [Google Scholar] [CrossRef]
- Göhlich, D.; Gräbener, S. Identification of User-oriented Electric Commercial Vehicle Concepts with a Particular Focus on Auxiliaries. In Proceedings of the 25th Aachen Colloquium Automobile and Engine Technology, Aachen, Germany, 10–12 October 2016. [Google Scholar]
- Kohl, J.L.; van der Schoor, M.J.; Syré, A.M.; Göhlich, D. Social sustainability in the development of service robots. Proc. Des. Soc. Des. Conf. 2020, 1, 1949–1958. [Google Scholar] [CrossRef]
- ADAC (Allgemeiner Deutscher Automobil Club). ADAC Ecotest. Available online: https://www.adac.de/infotestrat/tests/eco-test/default.aspx?redirectId=quer.ecotest (accessed on 1 December 2020).
- Bender, B.; Gerike, K. (Eds.) Pahl/Beiz Konstruktionslehre, 9th ed.; Springer: Berlin, Germany, 2020. [Google Scholar] [CrossRef]
- Fay, T.A. Methodischer Technologievergleich von Systemkonzepten für die Elektrifizierung von Stadtbussen; Epubli: Berlin, Germany, 2019. [Google Scholar]
- Horni, A.; Nagel, K.; Axhausen, K.W. (Eds.) The Multi-Agent Transport Simulation MATSim; Ubiquity: London, UK, 2016. [Google Scholar] [CrossRef]
- Ziemke, D.; Kaddoura, I.; Nagel, K. The MATSim Open Berlin Scenario: A multimodal agent-based transport simulation scenario based on synthetic demand modeling and open data. Procedia Comput. Sci. 2019, 151, 870–877. [Google Scholar] [CrossRef]
- Hörl, S.; Balac, M. Reproducible Scenarios for Agent-Based Transport Simulation; Technical Report; ETH Zürich: Zürich, Switzerland, 2020. [Google Scholar] [CrossRef]
- Neumann, A.; Balmer, M. Mobility Pattern Recognition (MPR) und Anonymisierung von Mobilfunkdaten; White Paper; Senozon Deutschland GmbH: Berlin, Germany; Senozon AG: Zürich, Switzerland, 2020; V1.0; Available online: https://senozon.com/wp-content/uploads/Whitepaper_MPR_Senozon_DE-3.pdf (accessed on 14 January 2021).
- jsprit. Available online: https://github.com/graphhopper/jsprit (accessed on 2 December 2020).
- Sun, X.H.; Yamamoto, T.; Morikawa, T. Fast-charging station choice behavior among battery electric vehicle users. Transp. Res. Part D Transp. Environ. 2016, 46, 26–39. [Google Scholar] [CrossRef]
- Nicholas, M. Estimating Electric Vehicle Charginginfrastructure Costs Across Major U.S. Metropolitan Areas. 2019. Available online: https://theicct.org/publications/charging-cost-US (accessed on 14 January 2021).
- Caprara, A.; Kellerer, H.; Pferschy, U. The Multiple Subset Sum Problem. SIAM J. Optim. 2000, 11, 308–319. [Google Scholar] [CrossRef]
- Bäumer, M.; Hautzinger, H.; Pfeiffer, M.; Stock, W. Fahrleistungserhebung 2014: Inlandsfahrleistung und Unfallrisiko. 2014. Available online: https://www.bast.de/BASt_2017/DE/Publikationen/Berichte/unterreihe-v/2018-2017/v291.html (accessed on 14 January 2021).
- Girardi, P.; Gargiulo, A.; Brambilla, P.C. A comparative LCA of an electric vehicle and an internal combustion engine vehicle using the appropriate power mix: The Italian case study. Int. J. Life Cycle Assess. 2015, 20, 1127–1142. [Google Scholar] [CrossRef]
- Bauer, C.; Hofer, J.; Althaus, H.J.; Del Duce, A.; Simons, A. The environmental performance of current and future passenger vehicles: Life cycle assessment based on a novel scenario analysis framework. Appl. Energy 2015, 157, 871–883. [Google Scholar] [CrossRef]
- Biart, M. Social Sustainability as Part of the Social Agenda of the European Community. Nachhalt. Soz. Nachhalt. Umweltpolit. Nachhalt. Informationen Umweltpolit. 2002, 149, 5–10. [Google Scholar]
- Littig, B.; Griessler, E. Social sustainability: A catchword between political pragmatism and social theory. Int. J. Sustain. Dev. 2005, 8, 65. [Google Scholar] [CrossRef]
- Cocklin, C.; Alston, M. Community Sustainability in Rural Australia: A Question of Captial? Centre for Rural Social Research: Wagga Wagga, NSW, Australia, 2002. [Google Scholar]
- Van der Schoor, M.J. Methoden der Produktentwicklung und Mechatronik: MURMEL Guideline. Available online: https://www.mpm.tu-berlin.de/fileadmin/fg89/PDFs/Forschung/MURMEL/Guideline.pdf (accessed on 14 January 2021).
- Geissdörfer, K.; Gleich, R.; Wald, A. Standardisierungspotentiale lebenszyklusbasierter Modelle des strategischen Kostenmanagements. Z. Betriebswirtschaft 2009, 79, 693–715. [Google Scholar] [CrossRef]
- Götze, U.; Weber, T. ZP-Stichwort: Total Cost of Ownership. Z. Plan. Unternehmenssteuerung 2008, 19, 249–257. [Google Scholar] [CrossRef]
- Goehlich, D.; Spangenberg, F.; Kunith, A. Stochastic total cost of ownership forecasting for innovative urban transport systems. In Proceedings of the 2013 IEEE International Conference on Industrial Engineering and Engineering Management, Bangkok, Thailand, 10–13 December 2013; pp. 838–842. [Google Scholar] [CrossRef]
- Jefferies, D.; Göhlich, D. Integrated TCO Assessment of Bus Network Electrification Considering Rescheduling and Delays: Modelling Framework and Case Study. In Proceedings of the EVS31 International Electric Vehicle Symposium & Exhibition, Kobe, Japan, 1–3 October 2018. [Google Scholar]
- Propfe, B.; Redelbach, M.; Santini, D.; Friedrich, H. Cost analysis of Plug-in Hybrid Electric Vehicles including Maintenance & Repair Costs and Resale Values. World Electr. Veh. J. 2012, 5, 886–895. [Google Scholar] [CrossRef]
- Miranda Jahn, R.; Syré, A.M.; Grahle, A.; Martins-Turner, K.; Göhlich, D. Methodology for Determining Charging Strategies for Freight Traffic Vehicles Based on Traffic Simulation Results; Technische Universität Berlin: Berlin, Germany, 2020. [Google Scholar] [CrossRef]
- Ewert, R.; Grahle, A.; Martins-Turner, K.; Syré, A.; Nagel, K.; Göhlich, D. Electrification of Urban Waste Collection: Introducing a Simulation-Based Methodology for Feasibility, Impact and Cost Analysis; Technische Universität Berlin: Berlin, Germany, 2020. [Google Scholar] [CrossRef]
- PTV; TCI; Mannh, H.U. Methodenhandbuch zum Bundesverkehrswegeplan 2030 (Entwurf). 2016. Available online: https://www.bmvi.de/SharedDocs/DE/Anlage/G/BVWP/bvwp-methodenhandbuch.pdf?__blob=publicationFile (accessed on 14 January 2021).
- Arroyo, J.L.; Felipe, Á.; Ortuño, M.T.; Tirado, G. Effectiveness of carbon pricing policies for promoting urban freight electrification: Analysis of last mile delivery in Madrid. Cent. Eur. J. Oper. Res. 2020, 28, 1417–1440. [Google Scholar] [CrossRef]
- Scharf, M.; Heide, L.; Grahle, A.; Syré, A.M.; Göhlich, D. Environmental Impact of Subsidy Concepts for Stimulating Car Sales in Germany. Sustainability 2020, 12, 10037. [Google Scholar] [CrossRef]
- Bundesministerium für Umwelt, Naturschutz und nukleare Sicherheit (BMU). Wie klimafreundlich sind Elektroautos? 2019. Available online: https://www.bmu.de/fileadmin/Daten_BMU/Download_PDF/Verkehr/emob_klimabilanz_2017_bf.pdf (accessed on 14 January 2021).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Battery Electric | Gasoline-Fuelled | Diesel-Fuelled | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Vehicle body share [%] | 91 (w/o battery) | 74 | 69 | ||||||
| Vehicle classes | small | medium | big | small | medium | big | small | medium | big |
| Vehicle mass [kg] | 1199 | 1677 | 2329 | 1068 | 1411 | 1639 | 1137 | 1503 | 1745 |
| Battery capacity [kWh] | 25 | 40 | 75 | - | - | - | - | - | - |
| Battery weight [kg] | 333 | 533 | 1000 | - | - | - | - | - | - |
| Urban consumption [l or kWh/100 km] | 15 | 20 | 25.9 | 7.3 | 8.7 | 10.5 | 5.7 | 6.7 | 8.4 |
| Suburban consumption [l or kWh/100 km] | 14 | 17 | 25.2 | 4.9 | 5.8 | 7.2 | 3.8 | 4.5 | 5.8 |
| Highway consumption [l or kWh/100 km] | 24 | 28 | 37.8 | 6.3 | 7.5 | 9.2 | 4.5 | 5.3 | 6.7 |
| Vehicle Classes | Base Case |
|---|---|
| Small | 27% (93% gasoline- and 8% diesel-fueled) |
| Medium | 40% (65% gasoline- and 35% diesel-fueled) |
| Large | 33% (49% gasoline- and 51% diesel-fueled) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Göhlich, D.; Nagel, K.; Syré, A.M.; Grahle, A.; Martins-Turner, K.; Ewert, R.; Miranda Jahn, R.; Jefferies, D. Integrated Approach for the Assessment of Strategies for the Decarbonization of Urban Traffic. Sustainability 2021, 13, 839. https://doi.org/10.3390/su13020839
Göhlich D, Nagel K, Syré AM, Grahle A, Martins-Turner K, Ewert R, Miranda Jahn R, Jefferies D. Integrated Approach for the Assessment of Strategies for the Decarbonization of Urban Traffic. Sustainability. 2021; 13(2):839. https://doi.org/10.3390/su13020839
Chicago/Turabian StyleGöhlich, Dietmar, Kai Nagel, Anne Magdalene Syré, Alexander Grahle, Kai Martins-Turner, Ricardo Ewert, Ricardo Miranda Jahn, and Dominic Jefferies. 2021. "Integrated Approach for the Assessment of Strategies for the Decarbonization of Urban Traffic" Sustainability 13, no. 2: 839. https://doi.org/10.3390/su13020839
APA StyleGöhlich, D., Nagel, K., Syré, A. M., Grahle, A., Martins-Turner, K., Ewert, R., Miranda Jahn, R., & Jefferies, D. (2021). Integrated Approach for the Assessment of Strategies for the Decarbonization of Urban Traffic. Sustainability, 13(2), 839. https://doi.org/10.3390/su13020839